三相逆变器的建模
三相SPWM逆变器的调制建模和仿真
teiv r rT ru hteu eo t b/ i l ka dP w rS se B o k ( S )p we s m lc s t o lo i lt n h e e. h o g s fMal n t h a Smui n o e ytm lc n PB o r y t bo k e ob xs s e T muai o
到 最 终 实现设 计要 求 的 可 视 化 桥 梁 。 被 广 泛 应 用 于 线 性 系统 、 线 性 系统 及 数 字 信 号 处 理 的 建 模 和 仿 真 中。 非 关键 词 : P S WM; 三相 逆 变 器 ; t bSm l k 仿 真 Ma a /i ui ; l n 中 图分 类 号 : M4 4 T 6 文 献 标识 码 : A 文 章编 号 :1 7 — 2 6 2 1 ) l 0 3 — 3 6 4 6 3 (0 3 0 一 12 0
( lc o iI om t nSh o, aguU ie o cec n ehooy Z ejag2 2 0 ,C ia Eet nc n r ai c olJ ns nvr fSinead Tc nl , h n n 1 0 3 hn ) r f o i s g i
Ab t a t h s p p rb e y d s r e h o k n rn i l fte t r ep a e S W M n et rb h i lt n o r e sr c :T i a e r f e c b d te w r i g p i c pe o h e - h s P i l i h - i v r y t e smu ai ft e 。 e o h _ p a eS W M v r r D s r e ei p t n u p t h r c e s A ay i d t e c a a tr f h ot g n u r n h o g h s P i et . e c i d t u d o t u a a t r. n lss h h r ce so e v l e a d c re t r u h n e b h n a c e t a t
三相SPWM逆变器的调制建模和仿真详解
三相SPWM逆变器的调制建模和仿真详解随着电力电子技术的发展,SPWM正弦脉宽调制法正逐渐被人们熟悉,这项技术的特点是通用性强,原理简单。
具有开关频率固定,控制和调节性能好,能消除谐波,设计简单,是一种比较好的波形改善法。
它的出现为中小型逆变器的发展起了重要的推动作用。
由于大功率电力电子装置的结构复杂,若直接对装置进行实验,且代价高费时费力,故在研制过程中需要借助计算机仿真技术,对装置的运行机理与特性,控制方法的有效性进行试验,以预测并解决问题,缩短研制时间。
MATLAB软件具有强大的数值计算功能,方便直观的Simulink建模环境,使复杂电力电子装置的建模与仿真成为可能。
本文利用MATLAB/Simulink为SPWM逆变电路建立系统仿真模型,并对其输出特性进行仿真分析。
首先介绍的是三相电压型桥式逆变电路原理,其次阐述了SPWM逆变器的工作原理及特点,最后详细介绍了三相电压源SPWM逆变器的建模与仿真结构,具体的跟随小编一起了解一下。
一、三相电压型桥式逆变电路三相电压型桥式逆变电路如图1所示,电压型三相桥式逆变电路的基本工作方式也是180导电方式,即每个桥臂的导电角度为180,同一相上下2个桥臂交替导电,各相开始导电的角度依次相差120。
这样,在任一瞬间,将有3个桥臂同时导通。
可能是上面一个臂下面2个臂,也可能是上面两个臂下面一个臂同时导通。
因为每次换流都是在同一相上下两个桥臂之间进行的,因此也被称为纵向换流。
当urU》uc时,给上桥V1臂以导通信号,给下桥臂V4以关断信号,则U相相对于电源假想中点N的输出电压uUN=Ud/2。
当urU《uc时,给V4导通,给V1关断,则uUN=Ud/2。
V1和V4的驱动信号始终是互补的。
当给V1(V4)加导通信号时,可能是V1(V4)导通,也可能是二极管VD1(VD4)续流导通。
二、SPWM逆变器的工作原理及特点SPWM,他是根据面积等效原理,PWM波形和正弦波是等效的,对于正弦波的负半周,也可以用同样的方法得到PWM波形。
基于状态空间法的三相逆变器建模

关 键 词 :空 间状 态 法 ; 三相 并 网逆 变 器 ;S P WM;Ma t l a b / S i m u l i n k仿 真
Mo d e l i n g o f Th r e e— — Vo l t a g e S o u r c e I n v e r t e r Ba s e d o n S t a t e- - s p a c e
( 1 .云 南 电 网公 司华 北 电 力 大 学研 究 生 工作 站 , 昆 明 6 5 0 2 1 7 ;
2 .云 南 电 网公 司 电力 研 究院 , 昆明 6 5 0 2 1 7 ;
3 .华 北0 7 1 0 0 0 )
摘要 :提 出将功 率开关器件理 想化 ,使用状 态空间法对滤波及 负载环 节建模 ,采 用 Ma t l a b / S i m u l i n k软件进 行仿 真验证 。 结果表 明 ,逆 变器的输 出电压 、电流 波形与理论分析结果一致 ,证 明了使 用状 态空间法对 滤波及 负载环 节建模方 法的正
第4 2卷 2 0 1 4年 2月
云
南
电
力
技
术
Vo 1 . 4 2 No .1
YUNNAN ELECTRI C P0W ER
F e b . 2 0 1 4
基 于 状 态 空 间 法 的 三 相 逆 变 器 建 模
李 鑫 ,王达 达 , 田沛。 ,张文 斌 ,苏 适
LI Xi n ,W ANG Da d a ,TI AN Pe i ,ZHANG We n bi n ,S U S h i
( 1 . G r a d u a t e Wo r k s t a t i o n o f N o a h C h i n a E l e c t r i c P o w e r U n i v e r s i t y& Y u n n a n P o w e r G r i d C o r p o r a t i o n , K u n m i n g 6 5 0 2 1 7 ;
改进电流型三相并网逆变器控制建模和仿真

S r tg o r e —Ph s i — Co ne td nv re t a e y f r Th e — a e Grd — n ce I e t r
XUE Mi g n ,YANG n Ga g
( .C a g h nIs t eo eh o g , h n c u in 10 1 , hn ; 1 h n c u tu f c n l y C a g h nJ i 3 0 2 C ia n it T o l
加前馈控制策略 , 实现了对 电流的有功分量与无功分量对并网逆变器系统输出性能的控制 。在 Smui i l k环境下建立了系统 n
的 仿 真模 型 , 真 结 果 表 明 , 进 型 的 电 流 控制 方 法 可 以 有 效 控 制并 网 系统 的有 功 与 无 功 功 率 , 波 畸 变 小 , 一 种 有 较 强 仿 改 谐 是
应用价值 的三相逆变器控制方案 , 为设计提供 了科学依据。 关键 词: 并网逆变器 ; 弦波脉宽调制 ; 正 前馈控制 ; 谐波畸变
中 图分 类 号 :P 9 . T 3 19 文献 标 识 码 : B
M o e i nd S m u a i n o n I p o e r e n r l dl ng a i l to f a m r v d Cu r nt Co t o
w v us dhMouao S WM)adt urn cnrldm to rpsd y印p igte A Kt n- aeP l Wi d l i e t t n( P n ecr t ot l ehdi pooe .B h e o e s l n R a s y hP r
2 ea met f o e & E e ySs m , cl S pr u 'lcii , a sFa c 19 ,C ia .D pr n w r t oP nr yt s E oe ur er Eetc 6 P r r e9 2 hn ) g e i d rt i n 1
三相逆变器的建模
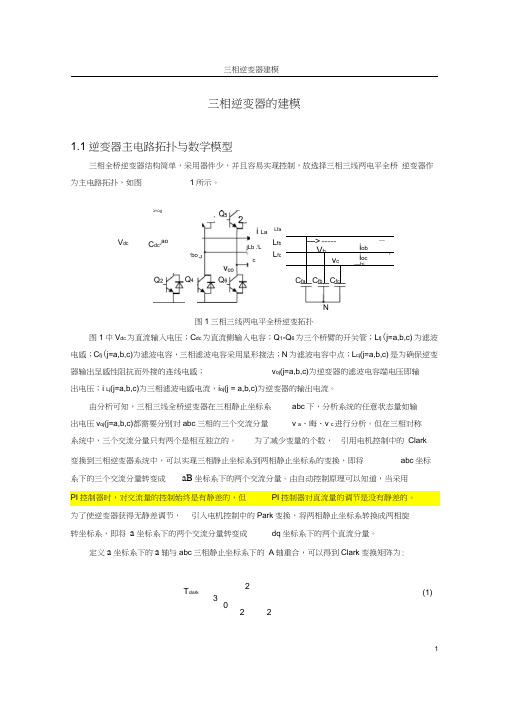
2(1)3 022三相逆变器的建模1.1逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥 逆变器作为主电路拓扑,如图1所示。
图1三相三线两电平全桥逆变拓扑图1中V dc 为直流输入电压;C dc 为直流侧输入电容;Q 1-Q 6为三个桥臂的开关管;L fj (j=a,b,c) 为滤波电感;C fj (j=a,b,c)为滤波电容,三相滤波电容采用星形接法;N 为滤波电容中点;L cj (j=a,b,c) 是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj (j=a,b,c)为逆变器的滤波电容端电压即输出电压;i Lj (j=a,b,c)为三相滤波电感电流,i oj (j = a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系 abc 下,分析系统的任意状态量如输 出电压v oj (j=a,b,c)都需要分别对abc 三相的三个交流分量 v °a 、晦、v °c 进行分析。
但在三相对称系统中,三个交流分量只有两个是相互独立的。
为了减少变量的个数, 引用电机控制中的 Clark变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将 abc 坐标系下的三个交流分量转变成aB 坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终是有静差的,但PI 控制器对直流量的调节是没有静差的。
为了使逆变器获得无静差调节, 引入电机控制中的Park 变换,将两相静止坐标系转换成两相旋 转坐标系,即将 a 坐标系下的两个交流分量转变成dq 坐标系下的两个直流分量。
定义a 坐标系下的a 轴与abc 三相静止坐标系下的 A 轴重合,可以得到Clark 变换矩阵为:T clarkV dcCdc vao—> ----- V bi ob —v ci oc—hiVC fa C fb C fcQ 425vbojLb .i L cQ ^Q rli LaLfaL fb L fcN两相静止坐标系a 到两相旋转坐标系dq的变换为Park变换,矩阵为:2(1)322cos(,t) sin(,t) —sin( .t) cos( .t)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:ua = U mCOS ( .t )5 二 U m cos( -t - 2 二 / 3) u c 二 U m cos( -t 2 二 / 3)经过Clark 和Park 后,可以得到:U d —U m U q =0由式⑶和式(4)可以看出,三相对称的交流量经过上述 Clark 和Park 变换后可以得到在d 轴和q 轴上的直流量,对此直流量进行PI 控制,可以取得无静差的控制效果。
一种三相SPWM逆变器的建模和控制方法

t n e e n u r e u e . F r t e s se b ln s t l - p ta d mu t o t u r g a c n r l o i v r ri p twee d d c d t o h y t m eo g o mu t i u n l — u p tp o r m o t in i o
s l sg a y mi t e tc lmo eswe e b itu ma l in ld na c mah ma ia d l r u l p,a h r nse u cinsfo mo u ao u pu nd t e ta f rf n to r m d l tro t t
s se n h d lo h y t m o ti s t r e s i a in c l ,t e lg l a o e s t n wa y t ms a d t e mo e f t e s se c n an wo o d ro cl to el h a —e d c mp n a i s l o po o e r p s d.Th l s d—o p a tma in s se wa ui t h o tol ro e co e lo uo to y t m sb l wih te c n rle fTMS 0F2 2,a d t a t 32 81 n he r -
2 C lg f uo a o nier g ia nvrt o eh o g , ia 10 8 C ia . o eeo tm t nE g e n ,X ’lU i s y f cnl y X ’n7 04 , h ) l A i n i l e i T o n
Absr c t a t:Be a s ft y a c s se c a a t rsiso h h e — h s PW M nv re e n ice e c u e o d n mi y t m h r ce tc ft e t r e p a e S he i i e t rb i g d s r t a d n n i e r h y l wi h a e a eo e a o si to u e o ta so m he d s r t y tm n o c n n o ln a ,t e c c e s t v r g p r trwa n r d c d t r n f r t ic e e s se i t o - c
T型三电平逆变器电驱动系统建模方法
T型三电平逆变器电驱动系统建模方法李敏裕;马晓军;闫之峰;张双喜【摘要】There are more areas in space vector diagram of three-level inverter than two-level inverter. Therefore the control algorithm will be very complex. The modeling method based on Simulink is not conducive for rapidly preparing,modifying and transplanting of control algorithm. A new method based on Simulink and S- function is proposed. The working principle of each module of the electric drive system is analyzed. The model is established by using Simulink or S- function according to the characteristics of different modules of the three-level speed regulating system.Finaly,all modules are connected to simulate.The simulation results verify the accuracy of the proposed modeling method.%与两电平逆变器相比,三电平逆变器空间矢量图分区数量大大增加,因此,控制算法的复杂性也大大增加,基于Simulink的建模方法不利于控制算法的快速编写、修改和移植.提出一种基于Simulink和S- 函数的复合建模方法,分析了三电平电驱动系统各个模块的原理,针对不同模块的特点,采用Simulink或者S- 函数方法建立MATLAB模型,最后将所有模块连接起来进行仿真,仿真结果验证了所提建模方法的准确性.【期刊名称】《火力与指挥控制》【年(卷),期】2017(042)010【总页数】5页(P44-48)【关键词】三电平逆变器;S函数;空间矢量【作者】李敏裕;马晓军;闫之峰;张双喜【作者单位】装甲兵工程学院,北京100072;装甲兵工程学院,北京100072;装甲兵工程学院,北京100072;北方自动控制技术研究所,太原030006【正文语种】中文【中图分类】TM743比起两电平逆变器,三电平逆变器能够有效提高逆变器输出电压等级、提高工作效率、改善输出谐波、降低电磁干扰,因此,具有很大的研究和应用价值[1]。
三相逆变器的建模及其控制
三相逆变器的建模及其控制屈百达;潘文英【摘要】功率开关的动作使三相逆变器成为一种典型的切换系统,常规的控制方法基本是从线性系统出发设计的,但是这些方法不能有效地反应逆变器的内在特性.因此在考虑逆变器的混杂特性的基础上,直接从切换理论出发,构建三相逆变器的数学模型,并给出了一种切换控制方法.该算法不需要复杂的坐标变换和解耦运算,就可以实现交流信号的有效跟踪,使得三相逆变具有了更高质量的正弦输出电流,仿真实验验证了该算法的有效性.【期刊名称】《电源技术》【年(卷),期】2014(038)002【总页数】4页(P345-348)【关键词】三相逆变器;切换系统;数学模型【作者】屈百达;潘文英【作者单位】江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122;江南大学轻工过程先进控制教育部重点实验室,江苏无锡214122【正文语种】中文【中图分类】TM464三相电压型逆变器应用于多种场合,例如静止无功补偿器、不间断电源、配电网的发电系统、电机的控制等。
在能源紧缺的当今世界,逆变器及其控制技术的研究具有重要的意义,并且越来越受到关注。
功率开关器件的存在,使得电力电子电路在工作时同时包含连续和离散两种状态。
对于三相逆变器,由于开关模态的多元化,使得其在建模过程更加复杂,逆变器的实际工作过程可以描述为在特定切换规则的控制下不同的连续子系统之间的切换。
近年来,切换系统的提出为电力电子电路分析和设计提供了新的视角。
从系统理论的角度讨论,大多数电力电子电路是属于切换系统,系统在切换开关的控制下在几个子系统中切换,每个子系统都有动态行为。
由于切换系统的非连续性,其结构模型具有分段特性,传统的控制理论无法对非线性系统直接设计控制。
目前,大部分逆变器基本采用的是电压型逆变器拓扑结构,控制方式多为线性控制,例如滞环电流控制、直接功率控制[1]、空间矢量调制(SVPWM)控制[2]等。
而这些基于理想等效设计的控制策略无法准确得到逆变器的运动规律,因而需要对其控制性能进行分析[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相逆变器的建模1.1 逆变器主电路拓扑与数学模型三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥逆变器作为主电路拓扑,如图 1所示。
图 1三相三线两电平全桥逆变拓扑图 1中V dc 为直流输入电压;C dc 为直流侧输入电容;Q 1-Q 6为三个桥臂的开关管;L fj (j =a ,b ,c )为滤波电感;C fj (j =a ,b ,c )为滤波电容,三相滤波电容采用星形接法;N 为滤波电容中点;L cj (j =a ,b,c )就是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj (j =a ,b ,c )为逆变器的滤波电容端电压即输出电压;i Lj (j =a ,b ,c )为三相滤波电感电流,i oj (j =a ,b ,c )为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc 下,分析系统的任意状态量如输出电压v oj (j =a ,b ,c )都需要分别对abc 三相的三个交流分量v oa 、v ob 、v oc 进行分析。
但在三相对称系统中,三个交流分量只有两个就是相互独立的。
为了减少变量的个数,引用电机控制中的Clark 变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc 坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终就是有静差的,但PI 控制器对直流量的调节就是没有静差的。
为了使逆变器获得无静差调节,引入电机控制中的Park 变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq 坐标系下的两个直流分量。
定义αβ坐标系下的α轴与abc 三相静止坐标系下的A 轴重合,可以得到Clark 变换矩阵为:11122230ClarkT ⎡⎤--⎢⎥⎢=⎢⎢⎣ (1)两相静止坐标系αβ到两相旋转坐标系dq 的变换为Park 变换,矩阵为:cos()sin()sin()cos()Park t t T t t ωωωω⎡⎤=⎢⎥-⎣⎦(2)对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为:cos()cos(2/3)cos(2/3)a mb mc m u U t u U t u U t ωωπωπ==-=+ (3)经过Clark 与Park 后,可以得到:d m q u U u ==(4)由式(3)与式 (4)可以瞧出,三相对称的交流量经过上述Clark 与Park 变换后可以得到在 d 轴与 q 轴上的直流量,对此直流量进行 PI 控制,可以取得无静差的控制效果。
1.1.1 在abc 静止坐标系下的数学模型首先考虑并网情况下,微电网储能逆变器的模型。
选取滤波电感电流为状态变量,列写方程:000a a a la b f b b lb c c lc c di dt u u i di L u u r i dt u u i di dt ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦(5)其中,f L 为滤波电感,r 为滤波电感寄生电阻,系统中三相滤波电感取值相同。
在abc 三相静止坐标系中,三个状态变量有两个变量独立变量,需要对两个个变量进行分析控制,但就是其控制量为交流量,所以其控制较复杂。
1.1.2 在αβ两相静止坐标系下的数学模型由于在三相三线对称系统中,三个变量中只有两个变量就是完全独立的,可以应用Clark 变换将三相静止坐标系中的变量变换到αβ两相静止坐标系下,如图 2所示。
A图 2 Clark 变换矢量图定义αβ坐标系中α轴与abc 坐标系中a 轴重合,根据等幅变换可以得到三相abc 坐标系到两相αβ坐标系的变换矩阵:12121203a b c u u u u u αβ⎡⎤--⎡⎤⎡⎤⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦(6)联立式(5)与式(6),可以得到微电网储能逆变器在αβ坐标系下的数学模型:00f di u u i dt L r u u i di dt ααααββββ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦(7)从式(7)可以瞧出,与三相静止坐标系下模型相比,减少了一个控制变量,而各变量仍然为交流量,控制器的设计依然比较复杂。
1.1.3 在dq 同步旋转坐标系下的数学模型根据终值定理,PI 控制器无法无静差跟踪正弦给定,所以为了获得正弦量的无静差跟踪,可以通过Clark 与Park 变换转换到dq 坐标系下进行控制。
dq 两相旋转坐标系相对于αβ两相静止坐标系以ω的角速度逆时针旋转,其坐标系间的夹角为θ,图 3给出了Park 变换矢量图。
图 3 Park 变换矢量图Park 变换矩阵方程为:cos sin sin cos d q u u t t u u t t αβωωωω⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦(8)联立式(7)与式(8)可得微电网储能逆变器在dq 坐标系下的数学模型:00df d d f q d qf q q f d q di L u u L i ri dtdi L u u L i ri dtωω⎧=-+-⎪⎪⎨⎪=---⎪⎩(9)在两相旋转坐标系下电路中控制变量为直流量,采用PI 控制能消除稳态误差,大大简化了系统控制器的设计。
但就是,由于dq 轴变量之间存在耦合量,其控制需要采用解耦控制,解耦控制方法将在下节介绍。
1.1.4 解耦控制从式(9)可以瞧出,dq 轴之间存在耦合,需要加入解耦控制。
令逆变器电压控制矢量的d 轴与q 轴分量为:d gd q dqgq d q v u Li v v u Li v ωω=+-∆⎧⎪⎨=--∆⎪⎩ (10)其中d v ∆,q v ∆分别就是d 轴与q 轴电流环的输出,当电流环采用PI 调节器,满足:**()()()()ii d ip d d ii q ip q q K v K i i sK v K i i s ⎧∆=+-⎪⎪⎨⎪∆=+-⎪⎩(11)ip K ,ii K 分别就是电流PI 调节器的比例系数与积分系数,*d i ,*q i 分别为d 轴与q 轴的参考电流,d i ,q i 分别为d 轴与q 轴的实际电流采样。
把公式(10)代入公式(9)可得:dd d q q qdi L ri v dtdi L ri vdt⎧=-+∆⎪⎪⎨⎪=-+∆⎪⎩ (12)由式(12)可以瞧出,由于在控制矢量中引入了电流反馈,抵消了系统实际模型中的耦合电流量,两轴电流已经实现独立控制。
同时控制中引入电网电压前馈量gd u 与gq u ,提高了系统对电网电压的动态响应。
图 4就是电流解耦控制框图。
解耦方法为在各轴电流PI 调节器输出中加入其她轴的解耦分量,解耦分量大小与本轴被控对象实际产生的耦合量大小一致,方向相反[1]。
图 4 电流解耦控制图对公式(12)进行拉普拉斯变换,同时把公式(11)代入公式(12)可得:()()()()()()ii d ip d d ii q ip q qk Ls r i k i i s k Ls r i k i i s **⎧+=+-⎪⎪⎨⎪+=+-⎪⎩(13) 在采用解耦控制之后,d 轴电流与q 轴电流分别控制。
图 5给出电流内环的结构框图。
*图 5 电流内环结构框图其中,s T 为电感电流采样周期,ip K 与ii K 对应电流环的PI 参数,1/(10.5)s T s +代表PWM 控制产生的惯性环节[2],1/(1)s T s +代表电流采样的延迟[3]。
PWM K 为调制比,由于本文空间矢量调制(Space Vector Pulse Width Modulation, SVPWM),调制过程中引入了直流电压的前馈环节,所以PWM K 可以表示为:1PWM K =(14)本系统开关频率与器件参数为:1/1/15kHz=66.7us s s T f ==, 1.5mH L =,0.1R =Ω,50uF C =。
由于d 轴与q 轴电流环完全对称,所以本文只分析d 轴电流环的设计过程。
由于合并小惯性环节并不会影响系统低频特性,可以将错误!未找到引用源。
化简,得到图 6。
图 6 d 轴电流环简化结构框图1.2 电压电流双环设计1.2.1 电流环设计由上述分析可知,在环路设计时可以对d 轴电流与q 轴电流分别进行控制[4],从而可以得到如图 7所示的电流环控制框图。
图 7 电流环控制框图其中, K ip 与K ii 对应电流环的PI 参数,T s 为电流内环采样周期,1/(1+T s s )与1/(1+0、5T s s )分别代替电流环信号采样的延迟与PWM 控制的小惯性延时环节[5]。
本文设计的系统参数如下:L =1、5mH,R =0、1Ω,C =50μF,T s =1/f s =1/15k Hz=66、7μs 。
由于d 轴与q 轴的电流环类似,故以d 轴电流环为例进行分析。
补偿前电流环的开环传递函数为:0()(1.51)()PWMc s K G s T s R Ls =++(15)补偿网络的传递函数为:1()ip iiK s K H s s+=(16)直流增益20lg|G c 0(s)|=20dB;幅频特性的转折频率为100Hz,设定补偿后的穿越频率为1/10的开关频率,即1500Hz 。
则有:011(21500)(21500)c G j H j ππ⋅=⋅(17)若加入补偿网络后,系统回路的开环增益曲线以-20dB/dec 斜率通过0dB 线,变换器具有较好的相位裕量。
由于补偿前的传递函数在中频段的斜率已经为-20dB/dec,因此补偿网络在1500Hz 时斜率为零。
将PI 调节器的零点设计在原传递函数的主导极点转折频率处,即100Hz 处。
令:ip iiK L K R= (18)联立式(17)及式(18)可得电流环的PI 参数:K ip =18,K ii =1200。
实际取值:K ip =10,K ii =1200。
频率/Hz图 8 电流环补偿前后的波特图图 8所示为电流环补偿前后的波特图。
可以瞧出,补偿前电流环的开环传递函数G c 0(s )在低频段的增益为20dB,并且在100Hz 时穿越0dB 线,相位裕度为75°;加入补偿环节后,电流环的闭环传递函数G il (s )其幅频特性曲线在1000Hz 处以-20dB/dec 斜率通过0dB 线,相位裕度为60°。
补偿之后回路的开环传递函数为:()()(1.51)()PWM ip ii s K K s K G s s T s R Ls +=++(19)因此,补偿之后电流环的闭环传递函数为:2()(1.51)()()1()() 1.51()11(1.51)()PWM ip ii s il PWM ip ii s ip PWMip PWM s K K s K s T s R Ls G s G s K K s K LT LG s s s K K K K s T s R Ls +++===+++++++ (20)1.2.2 电压环设计电压外环主要就是保证输出电压的稳态精度,动态响应相对较慢。