走航监测设备参数
转运监护仪技术参数

转运监护仪技术参数一.用途适用于成人、小儿、新生儿的监测。
二技术参数要求1.工作大气压力57.0~107.4kPa,满足高原地区的使用。
2.转运监护仪,满足救护车,通过相关转运标准3.>=5英寸彩色触摸显示屏,小巧便携。
4.IP44防尘防水,易清洁和适用医院内外不同临床救治环境。
5.坚固耐用,抗1.2米6面跌落,满足转运过程中的复杂临床救治环境。
6.整机无风扇设计。
7.内置锂电池供电,支持》二5小时的持续监测。
8.内置DC电源接口,可以进行车载充电。
9.支持3/5导心电,阻抗呼吸,血氧、无创血压和2通道体温,可选配双有创血压监测。
1。
篝温监护仪支持插入床旁监护仪插槽作为参数模块使用,即插即用。
11.具有多导心电监护算法,同步分析至少2通道心电波形,能够良好抗干扰。
12.心率测量范围:成人15-300bpm,小儿/新生儿15-350bpm13.波速提供50mm∕s,25mm∕sx 12.5mm∕sx6.25mm/s可选。
14.滤波模式提供诊断模式(0.05-150Hz)1监护模式(0.5-40Hz),ST模式(0.05-40Hz),手术模式(1-20Hz)o15.提供25种心律失常事件的分析。
16.提供ST段分析,提供显示和存储ST值和每个ST的模板。
17.具有QT/QTc测量功能,提供QT,QTC和AQTc参数值。
18.可显示弱灌注指数(P1)。
19.提供双通道体温测量,提供两通道体温测量差值显示。
20.提供手动、自动间隔、连续、序列四种无创血压测量模式。
21.120小时(分辨率1分钟)趋势表、趋势图回顾。
22.1000条事件回顾。
每条报警事件至少能够存储32秒三道相关波形,以及报警触发时所有测量参数值。
23.1000条NIBP测量结果回顾。
24.48小时全息波形回顾。
全息波形至少能存储所有测量值,以及至少3道波形。
25、整机质保三年。
RDI各型ADCP部分参数汇总

型号
频率(kHz)
主要安装方式
额定量程(m)
最小深度单元(m)
波束角
与波束数
发射速率(kHz)
最小盲区(m)
流速准确度(cm/s)
流速范围(m/s)
通信口
外部输入电源
最大空气中重量(kg)
最大外形尺寸(mm)
标准传感器
备注
骏马牌监测型直读式
300
坐底式(电缆连接)
110
1.0%
±0.5
-5—9m/s
(典型船速1-5节)
串口,
RS232,ASCII
波特率1200-115200
90-250VAC,47-63Hz,1400W
Φ914
温度
75
700
16
0.7
Φ480
150
400
8
1.5
Φ305
多功能精密测量设备,150kHzADCP
150
自容式、直读式、走航式
340
2-24
±0.3
型号
频率(kHz)
主要安装方式
额定量程(m)
最小深度单元(m)
波束角
与波束数
发射速率(kHz)
最小盲区(m)
流速准确度(cm/s)
流速范围(m/s)
通信口
外部输入电源
最大空气中重量(kg)
最大外形尺寸(mm)
标准传感器
备注
OS型船载ADCP
38
走航测量
1000
24
30°,四,相控阵
0.4
16
300
可走航,可锚系(电缆或调制解调)
110
8
20°,四
测量仪器参数

测量仪器参数一、GNSS:1、天宝:静态和快速静态GPS测量水平±5 mm + 0 5 ppm RMS垂直±5 mm + 1 ppm RMS动态测量水平±10 mm + 1 ppm RMS垂直±20 mm + 1 ppm RMS初始化时间一般少于10秒初始化可靠性>99 9%发送功率0 5 W发送距离:一般3-5公里,最佳可达10公里2、中海达:静态精度:平面:±(2.5mm+1×10-6D)高程:±(5mm+1×10-6D)快速静态精度:平面:±(5mm+1×10-6D)高程:±(10mm+1×10-6D)RTK定位精度:平面:±(10mm+1×10-6D) 高程:±(20mm+1×10-6D)3、华测静态和快速静态水平精度±(5 + 1×10-6×D) mm垂直精度±(10 + 2×10-6×D) mm作用距离(VHF)0-20km二、全站仪:1、莱卡TS09:有棱镜模式测距精度±1mm无棱镜模式测程>1000米测程3500mm标准:1mm + 1.5×10-6D / 2.4s ,快速:3mm + 2×10-6D / 0.8s,跟踪:3mm + 2×10-6D / <0.15s2、中海达GTS-102N测角精度:±2”/5”,绝对法测角,无需过零检验测距精度:±(2mm+2ppm*D)测程:2km/单棱镜高速测距:精测1.2秒,粗测0.7秒,跟踪0.4秒三、测深仪国产品牌测深范围:高频(0.3m~600m),低频(1m~3000m)测深精度:±2cm+0.1%分辨率:1cm吃水调整范围:0.0m~9.0m声速调整范围:1300~1700m/s四、水准仪1、型号:ZH7854每公里往返测量标准偏差:± 2.5mm放大倍率:24×最短视距:0.7m补偿工作范围:± 14′补偿安平精度:±0.5″2、型号DSZ2+FS1每公里往返测量标准偏差:± 1.5mm(普通标尺)放大倍率:32×最短视距:1.6m补偿工作范围:± 14′补偿安平精度:≤±0.3″。
GPS定位测量仪技术参数

GPS定位测量仪技术参数时动态(RTK)·水平精度:±(10+1×10-6×D)mm·垂直精度:±(20+1×10-6×D)mm·初始化时间:10s码差分定位(RTD)·水平精度:±(0.25+1×10-6×D)mm·垂直精度:±(0.25+1×10-6×D)mm静态·水平精度:±(2.5+1×10-6×D)mm·垂直精度:±(5+1×10-6×D)mm数据格式·导出格式:HCN、DAT、RINEX电气参数·主机功耗:2.8W·电池容量:3100m·电池工作时间:12小时·电池寿命:1000次充放电过程·外接电源:9-13.8VDC环境·工作温度:-45℃—?+75℃·存储温度:-50℃—?+85℃·湿度:100%无冷凝·防水:IP67标准,可进入水下1米,可漂浮·冲击和振动:抗2米跌落性能参数·通道:220通道和72通道·按键/显示:2按键/4LED显示·I/O:RS232、USB、蓝牙数据链·功率(UHF):1-28W可据需要任意调节·作用距离(UHF):0-28km·频宽:?220-240MHz/410-430MHz/450-470MHz可选·网络RTK距离>70km物理参数:·体积(W×H):(200×85)mm·重量:1.4Kg型式:手持式成套装置。
注:本设备包含安装和技术培训。
参考型号:华测RTKX90。
物流监护系统技术参数
物流监护系统技术参数
1. 设备硬件要求:设备硬件要求:
- 处理器:至少双核处理器
- 存储器:最少4GB内存
- 存储空间:至少100GB的硬盘空间
- 网络连接:稳定的互联网连接
2. 操作系统支持:操作系统支持:
- Windows 7或更高版本
- macOS 10.12或更高版本
- Linux(适用于服务器端)
3. 通信接口:通信接口:
- 支持常见的物流监护设备通信协议,如RS232、RS485、TCP/IP等。
- 支持与外部系统的数据交互,如ERP、数据库等。
4. 监测能力:监测能力:
- 实时监测货物的位置、温度、湿度等信息。
- 支持对多个货物同时进行监测和跟踪。
- 发出警报并记录异常情况。
5. 数据存储和分析:数据存储和分析:
- 数据记录和存储功能,包括时间戳和相关信息。
- 数据分析能力,例如生成报表、图表等,以便用户进行数据
分析和决策。
6. 用户界面:用户界面:
- 直观易用的用户界面,支持中文和英文等多语言。
- 提供可自定义的仪表盘和报表功能。
7. 安全性:安全性:
- 数据传输和存储的加密保护。
- 用户身份验证和权限管理。
- 定期的安全检查和更新。
请注意,以上技术参数仅为提供参考,实际系统的技术参数可
能会因不同的需求和供应商而有所差异。
在选择和实施物流监护系
统时,请与供应商进一步沟通以确保系统满足您的具体需求和要求。
GNSS测量接收机主要技术参数
GNSS测量接收机主要技术参数GNSS(全球导航卫星系统)测量接收机是用于接收来自卫星系统的导航信号,并通过对这些信号进行处理,计算出测量位置的设备。
这些接收机具有许多技术参数,以确保测量结果的准确性和可靠性。
下面是GNSS 测量接收机的主要技术参数。
1.接收灵敏度:接收灵敏度是指接收机对信号的灵敏程度。
高接收灵敏度能够接收到较弱的信号,从而提高接收机的工作范围和适用性。
2.信号跟踪能力:接收机应具有较强的信号跟踪能力,能够同时跟踪多个卫星的信号,并保持对信号的稳定跟踪,以提高测量结果的精度。
3.精度:接收机的精度是指接收机计算测量位置的准确性。
通常精度以水平、垂直和时间精度来表示,单位为米或纳秒。
4.多路径抑制:多路径是指卫星信号在传播过程中受到地面、建筑物等障碍物的反射和散射,导致接收机收到多个信号源的信号。
接收机需要具备多路径抑制功能,以减少多路径对测量结果的影响。
5.更新率:接收机的更新率是指接收机每秒钟计算测量位置的次数。
较高的更新率能够提供更实时的位置信息,对于动态应用如车辆导航和无人机监控等应用场景非常重要。
6.动态范围:动态范围是指接收机能够接收和处理的信号强度范围。
较宽的动态范围能够使接收机在复杂的信号环境下工作,提高测量结果的可靠性。
7.工作频率:GNSS系统包括多个频段的信号,不同的GNSS系统在不同的频段上工作。
接收机需要能够接收并处理所选定GNSS系统的信号,并在不同的频段选择合适的接收频率。
8.电源消耗:接收机的电源消耗是指接收机在工作过程中所消耗的电能。
较低的电源消耗能够延长接收机的工作时间,提高使用的便携性。
9.接收机类型:GNSS测量接收机根据其设计和应用环境可分为静态接收机和动态接收机。
静态接收机多应用于测量、科研等领域,而动态接收机多应用于车辆导航、无人机等动态应用场景。
10.数据通信接口:接收机需要具备数据通信接口,以便将测量结果传输给数据处理系统或其他设备。
城市轨道交通智能化系统工程质量检测仪器的主要性能和参数指标

检测仪器的主要性能和参数指标A.1 光源序号波长范围分辨率光源输出功率稳定度11310 nm/1550 nm0.01 dB± 0.02 dB /15min 2850 nm/1300 nm0.01 dBA.2 光功率计序号波长范围分辨率精度要求11310 nm/1550 nm0.01 dB± 5% 2850 nm/1300 nm0.01 dBA.3 光时域反射仪序号波长范围分辨率长度精度11310 nm/1550 nm0.001 km± 0.1% 2850 nm/1300 nm0.01 kmA.4 电缆布线测试仪布线等级 D 级 E 级E A级 F 级F A级仪表精度Ⅱ eⅢⅢ eⅣⅤA.5 矢量网络分析仪序号频率范围测量范围测量精度1450MHz ~ 9GHz0~ 50dB± 1.5dBA.6 数据网络测试仪1 应支持在 10M/100M/1000M/10G 以太网接口上的 100%满线速流程产生功能。
2 应具备 RFC2544网络性能检测功能,包括吞吐率、传输时延、时延抖动和丢包率检测。
3 应支持在 10M/100M/1000M/10G 以太网接口上的 100%满线速流量统计功能。
4 10M/100M/1000M 以太网测试时间标签精度应为 10us,10G 以太网测试时间标签精度应为 1us。
5 应支持网络流量监听功能,能够对网络利用率、单播帧、广播帧、多播帧、碰撞、各种类型的出错帧进行统计。
6应支持统计网络中产生业务量最多的节点、出错最多的节点,产生广播帧和多播帧最多的节点。
7应支持自动网络节点和拓扑发现功能,能自动生成网络节点列表,包括节点的 MAC 地址、 IP/IPX地址和名称的对应。
8应支持网络流量仿真功能,可指定数据包的内容和数据包长度,并可指定所产生流量的大小。
9应支持 Ping 和 Trace Route检测功能。
10应支持从网络设备上获取 SNMP数据的功能。
走航式多参数剖面测量系统(MVP)技术研究
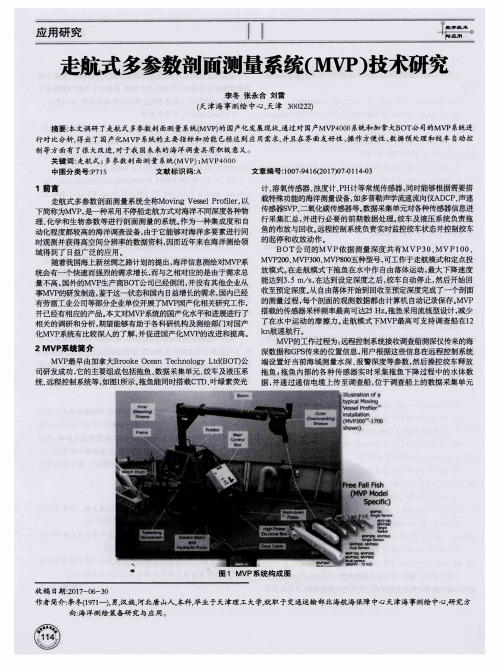
1前言
走航 式多参数剖面测量系统全 称Mo v i n g V e s s e l P r o f i l e r , 以 下简称为MV P, 是一种采用不停船走航方式对海洋 不同深度各种物 理、 化学 和生物参数等进 行剖 面测量的系统。 作为一种集成度和 自 动化程度都 较高的海洋调查设备 , 由于它能够对海 洋多要素进行同 时观测并获得高空 间分辨率 的数据资料, 因而近年来在海洋测绘领 域得到 了 日益广泛 的应用 。 随着我国海上新丝绸之路计划的提出, 海洋信息测绘X C MV P 系 统会有一 个 陕速而强烈的需求增长 , 而与之相对应的是 由于需求总 量不高 , 国外的MVP 生产商B OT 公司 已经倒 闭, 并没有其他企业从
应 用研 究
l ■ 【 粤 技 术
走航式多参数剖面测量系统( MV P ) 技术研究
李冬 张永合 刘雷
( 天津海事测绘 中心, 天津 3 0 0 2 2 2 )
摘要: 本文调研 了走航式 多参数剖面测量系统 ( Mv P ) 的 国产化发展现状, 通过对 国f i MV P 4 0 0 0 系统和加拿 大B o T公司的MV P系统进 行对 比分析 , 得 出了国产 ̄, MVP系统 的主要 指标和功 能已经达到应 用需 求, 并且在界 面友好性 、 操作 方便性 、 数据预处理和 绞车 自动控
vts参数

vts参数
VTS参数是指船舶交通服务(VTS)系统中使用的各种参数,这些参数可以提供良好的航行安全和交通流管制控制。
下面是关于VTS参数的详细介绍:
1. 货船的信号灯:这个参数描述了船只在海上行驶时所使用的航行灯光,包括船头灯、顶灯、船尾灯、侧灯等。
3. 静态信息:这些信息包括船只的名称、船舶呼号、MMSI号码、船长、宽度、吃水
深度等详情,这些信息可以帮助VTS系统进行有关的数据分析和评估。
4. 动态信息:这些信息包括船只的航行方向、航行速度、位置信息等动态数据,可
以为VTS系统提供实时的海情监控。
6. 泊位位置:这个参数描述了港口中不同的船只可以设置的停泊位置,以此解决靠
泊困难的问题。
7. 海图信息:这个参数描述了不同航道的情况,包括海上的深度、岩石、礁石等安
全因素和其他设施。
8. 预测水文学参数:这个参数描述了不同天气和水文学条件下船只的安全运行参数,可以帮助船只避免遭遇恶劣的天气和海况。
总之,VTS参数是非常重要的数据,可以帮助船只在海上保持安全和稳定的航行,也
可以有效控制航行中的交通流量。
VTS系统可根据实际需要适当调整VTS参数来提高效率
和安全性。
走航式ADCP操作说明

走航式ADCP操作说明—、配置GPS导航系统:1、按照中海达水下测量软件进行配置;2、其数据格式(Novtel BESTPOSB)应为:NMEA-0183$GPGGA V2.33、分电脑导航,专用电脑二、走航式ADCP配置1、首先在中海达程序里面找到如以下程序:设置好GPS的端口,数据格式转换是否正常等。
若果以上或以下正常,可以不进行这一步。
2、在采集模式下“设置”菜单,选择:通讯配置。
分别设置好所连接的设备,配置如下:(1) GPS 选择相应端口中:如COM1、波特率为:19200;NONE 、1(2) ADCP:选择相应端口中:如COM5、波特率为:19200;NONE 、1(3)若有外部罗经:选择相应端口中:如COM4、波特率为:38400;NONE 、13、在采集模式下“设置”—“配置向导”其中,此菜单中,(1)、文件名:为你所记录的文件名(2)输出目录:为你所保存的目录(3)偏移值:ADCP探头的吃水深为多少,磁偏角:根据你的外部罗经来设置,一般如上为0(4)设备:选择Rio Grande 600 kk,波束为20 deg 若连接那种设备就打勾(5)流量:顶部与底部均选:“Power”,幂曲线系数:0.1667左岸右岸系数为常规的岸边系数,要除以2,如07流量岸边系数,应填0.35,岸边数据个数:一般选择为10(指要在靠岸边时停留测至少10个数据以上.(6)、ADCP配置:最大水深、最大流速与最大船速为估测河床类型:根据现场选择测流模式:AUTO(自由)底跟踪模式:Mode 5(7)、设置完后,点“运行向导”,后“另存为”你所存的位置,以后可以直接提取3、在采集模式下“设置”—“参考”根据需要选择,一般为“底跟踪”若GPS 选择 GPS4、在采集模式下“设置”—“用户选项”根据需要选择,一般为默认5、在采集模式下“设置”—“配置设置”(1)“命令”用户命令一般只需图中的五个命令:其意义与输法如下:“WF0”,代表盲区,0为盲区深度代表,单位为“cm”“WS50”所测区的水深分层深度代表,单位为“cm”,50表示50cm水深为一层“WN82”为根据实测水深,分多少层,并加两层,如50cm一层,82代表水深为40m,“WP1”水跟踪(不变)“BP2”底跟踪(不变)(2)、偏移量根据实际值来测算(3)处理按下图一般不变(4)流量根据实际情况选择,按照“配置向导”一样设置,“岸”中选择“系数”,与“配置向导”一样。
船用GSM GPS进出港口前端监控设备说明

船用GSM GPS进出港口前端监控设备说明硬件注意的地方:START和TEST跳线都不要,如果是232的GPS则选择232,如果是TTL的GPS则选择485。
船用GPS/GSM前端监控设备功能描述1、设备分为两类。
一类包含内置GPS模块;一类不包含内置GPS模块,通过RS 232串口连接外部GPS设备。
该设备应能自动识别2400/4800/9600波特率输入。
通过短消息设置波特率为2400的命令:DGJ000000STBUB设置波特率为4800的命令:DGJ000000STBUC设置波特率为9600的命令:DGJ000000STBUD确认波特率设置的命令:DGJ000000STBU!2、每一台船用GSM设备有唯一的数字编号,编号范围为001~999。
该编号固化在系统中,不能改变。
通过短消息设置设备编号:DGJ000000STNL:HGGPS0013、监控中心号码保存在船用GSM设备的SIM卡中,用户可以通过手机更改。
4、该设备安装在驾驶室内的操作台上。
要求有电源指示灯、GPS数据,GSM状态(登录,脱网),发送,接收等指示灯。
5、设备上电时刻,发送一条短信息,表明该设备已开始工作。
如果当前时刻未能登录网络,应保留数据,直到发送成功。
在该功能项中,如果没有收到GPS信息,可将GPS信息(<1>~<13>)项省略。
信息内容:设备编号,功能码(01),GPS信息内容信息格式:$GPS:船舶报位信息标识字头xxx:船舶编号,3字符ASCII,范围:1-99901:功能码,表示设备上电工作<1>:UTC时间,HHMMSS GPRMC<1> UTC time<2>:状态,A:已定位V:未定位GPRMC<2> Status<3>:纬度,DDMM.MMMM GPRMC<3> Latitude<4>:纬度,N:北纬S:南纬GPRMC<4> Latitude hemisphere<5>:经度,DDMMM.MMMM GPRMC<5> Longitude<6>:经度,W:西经E:东经GPRMC<6> Longitude hemisphere<7>:速度,000.0--999.9 GPRMC<7> Speed over ground<8>:角度,000.0--359.9 GPRMC<8> Course over ground<9>:UTC日期,DDMMYY GPRMC<9> UTC date6、然后进入24小时连续工作状态,按照设定的时间间隔报告。
海星达irtk4参数
海星达IRTK4是一款卫星定位接收器,其参数包括:
1. 接收机型号:IRTK4
2. 接收机通道数:多通道
3. 定位精度:厘米级
4. 定位时间:数秒至数十秒
5. 接收机类型:GPS/北斗双模
6. 接收机输出格式:NMEA、RTCM等
7. 接收机灵敏度:-159dBm
8. 卫星接收频率:1575.42MHz
9. 蓝牙传输频率:4.0/4.2/5.0
10. 工作温度:-20℃至+60℃
具体使用方法如下:
1. 将接收机天线安装到无人机或其他载体上,确保天线稳定。
2. 将电源线接入接收机,并打开电源,接收机开始自检和初始化。
3. 自检完成后,通过蓝牙将接收机与移动设备连接,可以使用手机、平板电脑等设备进行操作。
4. 在移动设备上下载相关软件,按照软件提示设置好参数,即可开始接收卫星信号。
5. 接收机接收到卫星信号后,通过软件处理即可获得精准的定位信息。
6. 根据需要,可以通过蓝牙将数据传输到其他设备或移动设备中。
7. 在使用过程中,需要注意保护好接收机,避免摔碰和强烈震动,同时也要避免长时间暴露在高温环境中。
以上参数仅供参考,实际使用效果可能因环境、设备状态等因素而有所差异。
在使用过程中,建议参考海星达官方提供的操作指南和设备说明书,并结合实际情况进行调整和操作。
走航式ADCP简介

投标支持文件汇编投标产品名称:声学多普勒流速剖面仪 (ADCP)生产厂家:RD Instruments (RDI),美国(1)RDI公司及其ADCP简介(2)RDI公司ISO9001 国际质量体系认证证书(3)上海黄浦江和太浦河ADCP比测实验部分图片(4)长江三峡黄陵庙水文站ADCP与DGPS、测深仪、及电罗经集成试验简报(5)走航式ADCP测量软件WinRiver中文版(6)RDI公司河流型ADCP国内用户名单(7)关于ADCP四波束和三波束的讨论(8)关于ADCP工作模式的讨论(1) 美国RDI公司及其ADCP简介RD Instruments,简称RDI,位于美国加利福尼亚州圣地亚哥市,是全球最大的ADCP(即:声学多普勒流速剖面仪)生产厂家。
RDI已通过ISO9001国际质量体系认证。
目前年产值超过两千万美元。
RDI成立于1981年。
在二十多年的发展历程中,RDI始终位于ADCP技术的世界领先地位。
以下是 RDI公司的重要技术成果:•1981,生产出世界上第一台商品ADCP•1982,河流型ADCP,开创了ADCP河流流量测量的纪元•1991,宽带 ADCP专利技术•1995,“骏马”系列 ADCP:使ADCP小型化,价格大幅度降低•1997,“骏马”系列“瑞江”牌河流型ADCP•1998,相控阵ADCP专利技术•1999,ADCP波浪仪专利技术•2001,H-ADCP:用于河流流量在线监测•2001, 零盲区技术RDI公司向中国客户提供ADCP已有十几年的历史。
至今已有一百多台RDI公司生产的ADCP应用于中国的海洋、河流、科研船只、海军舰艇、海上采油平台、等等。
其中应用于河流流量测量的走航式ADCP有四十几台。
RDI公司生产的ADCP以其优良的性能和可靠性赢得了用户的好评。
其重要优点为:∙采用宽带专利技术,因此具有高分辩率、高精度。
这对走航测量尤为重要。
∙采用四波束换能器。
有效地消除船摇晃的影响; 提高测量的可靠性。
走航车环境监测标准
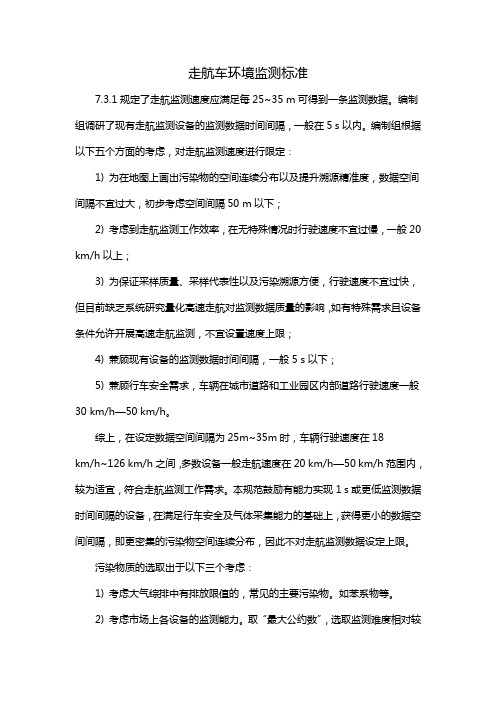
走航车环境监测标准7.3.1规定了走航监测速度应满足每25~35 m可得到一条监测数据。
编制组调研了现有走航监测设备的监测数据时间间隔,一般在5 s以内。
编制组根据以下五个方面的考虑,对走航监测速度进行限定:1) 为在地图上画出污染物的空间连续分布以及提升溯源精准度,数据空间间隔不宜过大,初步考虑空间间隔50 m以下;2) 考虑到走航监测工作效率,在无特殊情况时行驶速度不宜过慢,一般20 km/h以上;3) 为保证采样质量、采样代表性以及污染溯源方便,行驶速度不宜过快,但目前缺乏系统研究量化高速走航对监测数据质量的影响,如有特殊需求且设备条件允许开展高速走航监测,不宜设置速度上限;4) 兼顾现有设备的监测数据时间间隔,一般5 s以下;5) 兼顾行车安全需求,车辆在城市道路和工业园区内部道路行驶速度一般30 km/h—50 km/h。
综上,在设定数据空间间隔为25m~35m时,车辆行驶速度在18km/h~126 km/h之间,多数设备一般走航速度在20 km/h—50 km/h范围内,较为适宜,符合走航监测工作需求。
本规范鼓励有能力实现1 s或更低监测数据时间间隔的设备,在满足行车安全及气体采集能力的基础上,获得更小的数据空间间隔,即更密集的污染物空间连续分布,因此不对走航监测数据设定上限。
污染物质的选取出于以下三个考虑:1) 考虑大气综排中有排放限值的,常见的主要污染物。
如苯系物等。
2) 考虑市场上各设备的监测能力。
取“最大公约数”,选取监测难度相对较低,可供不同设备、不同用户单位间相互比较的污染物,以这些污染物作为必测污染物。
3) 考虑管理需求和技术发展趋势,充分发挥走航监测的优势。
为鼓励走航监测技术的发展,进一步挖掘工业区复杂污染特征,服务于环境管理,在前两项原则的基础上,继续选取多项卤代烃、含氧挥发性有机物、恶臭类物质,尽量覆盖最常见的、用量大的、高毒性或高光化学活性的挥发性有机物。
走航监测设备参数
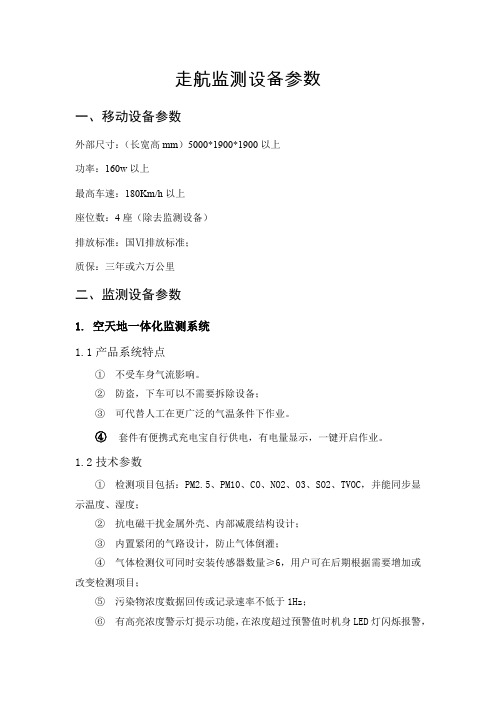
走航监测设备参数一、移动设备参数外部尺寸:(长宽高mm)5000*1900*1900以上功率:160w以上最高车速:180Km/h以上座位数:4座(除去监测设备)排放标准:国Ⅵ排放标准;质保:三年或六万公里二、监测设备参数1.空天地一体化监测系统1.1产品系统特点①不受车身气流影响。
②防盗,下车可以不需要拆除设备;③可代替人工在更广泛的气温条件下作业。
④套件有便携式充电宝自行供电,有电量显示,一键开启作业。
1.2技术参数①检测项目包括:PM2.5、PM10、CO、NO2、O3、SO2、TVOC,并能同步显示温度、湿度;②抗电磁干扰金属外壳、内部减震结构设计;③内置紧闭的气路设计,防止气体倒灌;④气体检测仪可同时安装传感器数量≥6,用户可在后期根据需要增加或改变检测项目;⑤污染物浓度数据回传或记录速率不低于1Hz;⑥有高亮浓度警示灯提示功能,在浓度超过预警值时机身LED灯闪烁报警,颜色和报警值可自定义;⑦内置4G远程数传与定位系统,具备SD数据自动备份功能,无需软件干预,每次启动预热完成且有GPS信号的情况下会自动备份任务数据。
⑧支持多台气体检测设备同时向一或多个可视化终端传输数据,传输距离不受限制。
⑨支持在移动航线规划与走航软件中显示实时监测数值与设备工作状态。
⑩设备除了能搭载汽车上,还可搭载在高空监测飞行器上使用;11 支持在高空监测飞行器航线规划与飞行控制软件中显示实时监测数值与设备工作状态。
12 支持气体采样功能,可同时通过高空监测飞行器飞控软件及气体监测软件触发采气,自适应不同容量采气袋(0.5L-4L),实时监控袋内气压,采满即可自动停止,无需手动干预。
1.3气体检测参数要求①激光粉尘传感器-检测方式:激光散射/光散射或更精确、快速的监测方式;-检测PM2.5、PM10数值;-量程:0~1000ug/m3;-检出限:1ug/m3;-时间分辨率:1s;-具备湿度校正算法,可在宽湿度范围提供较为准确的测量值;②CO监测模块参数-检测方式:电化学或更精确、快速的监测方式;-可用量程:0~10mg/m3;-检出限:0.005mg/m3;-时间分辨率:1s;③NO2监测模块参数-检测方式:电化学或更精确、快速的监测方式;-可用量程:0~20000ug/m3;-检出限:10ug/m3;-时间分辨率:1s;④SO2监测模块参数-检测方式:电化学或更精确、快速的监测方式;-可用量程:0~40000ug/m3;-检出限:15ug/m3;-时间分辨率:1s;⑤O3与NO2监测模块参数(自动减去NO2值测O3)-检测方式:电化学或更精确、快速的监测方式;-可用量程:0~20000ug/m3;-检出限:10ug/m3;-时间分辨率:1s;⑥VOCs检测模块-检测方式:光离子化检测(PID)或更精确、快速的监测方式;-目标气体:电离势能<10.6eV的挥发性有机物(VOCs);-可用量程:0~125mg/m3(默认异丁烯);-检出限:2.5ug/m3。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
走航监测设备参数
一、移动设备参数
外部尺寸:(长宽高mm)5000*1900*1900以上
功率:160w以上
最高车速:180Km/h以上
座位数:4座(除去监测设备)
排放标准:国Ⅵ排放标准;
质保:三年或六万公里
二、监测设备参数
1.空天地一体化监测系统
1.1产品系统特点
①不受车身气流影响。
②防盗,下车可以不需要拆除设备;
③可代替人工在更广泛的气温条件下作业。
④套件有便携式充电宝自行供电,有电量显示,一键开启作业。
1.2技术参数
①检测项目包括:PM2.5、PM10、CO、NO2、O3、SO2、TVOC,并能同步显示温度、湿度;
②抗电磁干扰金属外壳、内部减震结构设计;
③内置紧闭的气路设计,防止气体倒灌;
④气体检测仪可同时安装传感器数量≥6,用户可在后期根据需要增加或改变检测项目;
⑤污染物浓度数据回传或记录速率不低于1Hz;
⑥有高亮浓度警示灯提示功能,在浓度超过预警值时机身LED灯闪烁报警,
颜色和报警值可自定义;
⑦内置4G远程数传与定位系统,具备SD数据自动备份功能,无需软件干预,每次启动预热完成且有GPS信号的情况下会自动备份任务数据。
⑧支持多台气体检测设备同时向一或多个可视化终端传输数据,传输距离不受限制。
⑨支持在移动航线规划与走航软件中显示实时监测数值与设备工作状态。
⑩设备除了能搭载汽车上,还可搭载在高空监测飞行器上使用;
11 支持在高空监测飞行器航线规划与飞行控制软件中显示实时监测数值与设备工作状态。
12 支持气体采样功能,可同时通过高空监测飞行器飞控软件及气体监测软件触发采气,自适应不同容量采气袋(0.5L-4L),实时监控袋内气压,采满即可自动停止,无需手动干预。
1.3气体检测参数要求
①激光粉尘传感器
-检测方式:激光散射/光散射或更精确、快速的监测方式;
-检测PM
2.5、PM
10
数值;
-量程:0~1000ug/m3;
-检出限:1ug/m3;
-时间分辨率:1s;
-具备湿度校正算法,可在宽湿度范围提供较为准确的测量值;
②CO监测模块参数
-检测方式:电化学或更精确、快速的监测方式;
-可用量程:0~10mg/m3;
-检出限:0.005mg/m3;
-时间分辨率:1s;
③NO
2
监测模块参数
-检测方式:电化学或更精确、快速的监测方式;
-可用量程:0~20000ug/m3;
-检出限:10ug/m3;
-时间分辨率:1s;
④SO
2
监测模块参数
-检测方式:电化学或更精确、快速的监测方式;-可用量程:0~40000ug/m3;
-检出限:15ug/m3;
-时间分辨率:1s;
⑤O
3与NO
2
监测模块参数(自动减去NO
2
值测O
3
)
-检测方式:电化学或更精确、快速的监测方式;
-可用量程:0~20000ug/m3;
-检出限:10ug/m3;
-时间分辨率:1s;
⑥VOCs检测模块
-检测方式:光离子化检测(PID)或更精确、快速的监测方式;
-目标气体:电离势能<10.6eV的挥发性有机物(VOCs);
-可用量程:0~125mg/m3(默认异丁烯);
-检出限:2.5ug/m3。
1.4高空采样系统参数
①双电池供电系统
②最大载重 2.7 kg
③最大起飞重量 9 kg
④最大飞行海拔高度5000 m
⑤最大可承受风速 15 m/s (7级风)
⑥最大飞行时间 55 min
⑦支持云台安装方式:下置单云台、上置单云台、下置双云台、下置单云台+上置单云台、下置双云台+上置单云台
⑧IP 防护等级:IP45
⑨最大信号有效距离(无干扰、无遮挡) 15km
⑩具备前后左右上下障碍物感知系统
11 标配上下补光灯,有效照明5m
12 标配FPV第一人称摄像头
2、便携式气体多参数分析仪
2.1产品介绍
在地形较为复杂车开不进、无人机限飞的区域,通过人工配备便携式的监测仪器来进行巡查。
确检测分析TVOC、H2S、NH3、恶臭OU 值、可燃气体、有毒有害气体。
气体分析仪采用高清彩屏实时显示浓度,采用电化学、PID 光离子、MOS金属氧化物传感器。
2.2产品特点
①防水溅、防尘、防震、抗静电干扰;
②防护等级IP65,配套水汽过滤器,防止因水汽导致传感器故障,数据异常;
③内置泵吸式测量,响应迅速,采样距离大于10米,特殊气路设计,可直接检测正压或负压-0.3~2公斤的气体,对测量结果无影响;
④具有高清彩色显示屏实现实时浓度、报警、时间、存储、通信,仪器具有独立的电量显示单元,可以实时查看仪器电量情况;
⑤大容量数据存储功能,标配存储10万条数据,更大容量可定制。
⑥配备USB接口、网口、无线网络传输等功能,可以远程查看校准设备,便于维护,提高工作效率;
⑦采用大容量可充电锂电池,3小时快速充电,连续工作不少于8小时;
⑧精度高,气体可检测到PPB级别,适用于多种环境空气的气体测量;
⑨中文操作界面,操作见面简洁明了,操作方便;
2.3技术参数
3、空天地一体化监测平台
3.1平台功能
1、可显示当前所有监测站环境空气与有毒有害气体生报警超标,可第一时间定位站点位置;
2、直观显示整个监测区域的环境空气与有毒有害气体污染浓度差异,,可精确到每条街道、每栋楼。
支持AQI六级浓度预警,不同颜色对应不同浓度;
3、结合当时当地的气象特点,判断环境空气与有毒有害气体污染传输方向
与污染范围,并评估由此带来的环境影响;
4、可清晰体现不同高度下的污染物浓度分布情况,帮助用户捋清污染原因
及三维传输特点,精准定位污染源;
5、通过监测设备按照确定的数据分析框架收集相关数据,在收集到的数据中提取各监测点位最新监测数据,点击查看相关信息和实时监测的最新数据方便查看管理;
6、浓度分布热力图在地图中对应显示,地图模式可选卫星图与街道图
3.2实时数据
1、具备数据断点续传功能,通信中断时(例如进入传输信号盲区)采集到
的任务数据不会丢失,并且会在连接重新建立后自动追回,并显示待传数据量;
2、实时显示气体检测仪的工作状态,包括GPS星数、相对高度;
3、实时显示空气污染物浓度时间变化曲线图;
4、实时生成二维网格空气污染分布热力图,且网格大小实时可调;
5、实时生成二维等值线空气污染分布热力图;
6、实时生成三维点云污染物浓度分布热力图,且视角可调,可点击精确显
示采样点的经纬度与相对高度;
7、污染物浓度的可视化颜色关系支持实时在平台中手动或自动调节;
3.3数据分析
1、显示同一时间内环境空气与有毒有害气体多个监测参数直观的分析对比
曲线图;
2、可以选择查看环境空气与有毒有害气体各个监测参数在一个月内的变化
曲线;
3、以选择查看环境空气与有毒有害气体各个监测参数在一个时间段内的最
优排名和最差排名柱状图;
4、环境空气与有毒有害气体逐时、逐日、逐月、逐季、逐年及任意时间段
展示倒序、正序排名;
5、环境空气与有毒有害气体日度、月度、季度、年度排名图表和排名统计
分析,分析内容包括排名变化情况;
6、环境空气与有毒有害气体日度、月度、季度、年度对比分析、同比分析、
环比分析;
3.4数据报表
1、一键导出原始数据到Excel或WPS等软件。
2、一键式导出任务报告。
3、通过条件筛选查看一个时间段内站点历史监测数据并可以进行数据下载;
三、其他要求
1、走航车辆(包括监测设备)手续齐全,能够通过验收和审核,确保正
常挂牌上路和检测。
2、包括两年的运行维护费用(包括年审费、燃油费、维护费、培训费等),
此费用为10万元的固定投标价。