人眼的立体视觉特性
人眼特征及视觉感知解析

• · 当有光线时,人眼睛能辨别物象本体的明暗。物象有了 明暗的对比,眼睛便能产生视觉的空间深度,看到对象的 立体程度。同时眼睛能识别形状,有助我们辨认物体的形 态。此外,人眼能看到色彩,称为色彩视或色觉。此四种 视觉的能力,是混为一体使用的,作为我们探察与辨别外 界数据,建立视觉感知的源头。
• 眼睛除了要辨认物象的特征,还要知道对象的位置,及其活动上的变 化,才可驱使身体其它部位作出相应的动作。 • · 在理解自身与外界之间的距离或深度,人类的知觉,可从视野所得 的资料中,抽出有关空间的提示,从而知识到自己与各种对象的距离。 视网膜是视觉的核心,它是一片平面的薄膜,获得的物象是平板而缺 乏立体感的。所以知觉需要组织起其它信息,才能做出对深度的感知。 人类的眼球天赋便有辨别立体深度和距离的本能,因为人类是用双目 平排而视。同时通过外物在视野范围中所形成的物象大小,以及排列 或表现的状态,认知该物与我们的距离。甚至可通过形状及色彩获得 有关距离的资料。 • · 眼睛能看到物体的移动,有助辨别物体的方向和运动的速度。
• 影像感知 • · 眼睛后段是感光的部分。后段有视网膜,它是由两种感 光细胞所组成,这两种细胞因其形状而名为杆状细胞(rod cells)和锥状细胞(cone cells),作用是将水晶体聚焦而成 的光线变成电信号,并由神经细胞送往脑部。视网膜上的 神经会聚并连结到大脑的一点,由于没有光线的受体,所 以大脑无法感知聚焦该处的影像,故名盲点。
• 视觉区域 • · 感觉光暗的杆状细胞和感觉色彩的锥状细胞在视网膜表 面并不是平均分布的,在感知中起重要作用的锥细胞大部 分集中在视网膜中的一小片称为黄点的地方。因此我们在 观看景物和阅读时,注意力只是集中在视野ห้องสมุดไป่ตู้围一半不到 的区域。
视觉与色度学

§1.3.2 三基色原理
人对该彩色光的亮度感觉决定于总光通量 Φ,人对该 彩色光的色度感觉决定于ΦR、ΦG、ΦB之间的比例。
彩色重现并不要求恢复景物的原始光谱成分,只需获 得与原景物相同的彩色感觉。
具有不同光谱功率分布的光,只要ΦR、ΦG、ΦB相同, 则它们的色彩视觉完全等效。
连续分布:
R378800r()e()d
G378800g()e()d
780
B380b()e()d
RGB色度图
色度(色调、饱和度)只与三刺激值的比例有关。 令: R+G+B=m
➢ 亮度表征了发光面的明亮程度; ➢ 同样的发光强度面积越小亮度越大。
照度 E:物体表面受到光照射时,单位面积上入射 的光通量,单位是lx,读作勒克斯
➢ 1勒克司等于每平方米上有1流明的光通量; 1lx= 1 lm/m2
➢ 同样的光通量面积越小光照度越大。
§1.2.2 人的色度视觉特性
彩色视觉
§1.3.2 三基色原理 相加混色(屏幕) 相减混色(绘画)
两种原色混合=次色
C
M
Y
两种原色的补色
R
G
B
次色+补色=白色
§1.3.2 色光按一定的顺序轮流投射到同一 个表面上。是顺序制彩色电视的基础。
➢ 空间混色法:将三种基色光分别投射到同一个表面上邻近 的三个点上。是同时制彩色电视的基础。
•人眼对不同波长的光有不同的色调感觉。 •人眼能分辨出色调差别的最小波长变化称为色调分 辨阈,色调分辨力与色调分辨阈成反比。 •色调分辨力随波长变化而改变,480~640 nm 区间色光的色调分辨力较高。 •饱和度变小时,人眼的色调分辨力下降。 •亮度太大或太小时,人眼的色调分辨力下降。
立体成像原理

立体成像原理图1.单眼水平视角图如图所示:人单眼的水平视角最大可达156度,双眼的水平视角最大可达188度。
人两眼重合视域为124度,单眼舒适视域为60度。
什么意思呢?1.人眼其实观看到的并不仅仅是一个具有重合视角的平面,而是一个超过180度鱼眼镜头的188度环形平面,类似于近期比较流行的环形电影屏幕。
2.人两眼重合视域有124度。
也就是说在人眼观看到的范围内,只有这124 度视角内的物体才有立体感。
换句话说只有这124度两眼重合视域内观看到的物体截面,超过了180度,以至于形成了立体感。
3.单眼舒适视域为60度。
是讲只有这单眼的60度范围内的物体,人们才能够看清楚,人眼才能够聚焦。
单眼剩余这96度(156-60=96)的视域,我们一般俗称为“余光”,其实是人眼并不敏感的范围,也就是无法看清楚的。
当然我们所需要研究的是双眼所呈现的立体视觉,以上这部分仅作陈述基础。
图2.双眼水平视角图这里我以6厘米的瞳距为例,画了这张双眼水平视角图。
用photoshop做了一下修改,不同视角的不同区域均用不同颜色填充,因为都设定了30%的透明度,所以重合的区域可以很直观地看到。
1.我用大写英文字母标明了不同的区域:D和E分别为左右眼的156度视角;B和C为左右眼60度舒适视域;A区为左右眼60度舒适视域重合部分。
2.用小写英文字母在视线的各个末端进行了标拄,这样在说明某个特定视角时会比较方便。
例如:∠ dxg为D区、∠cyg为D和E的重合部分。
很直观的图表,我们可以看到:1.∠xyz实际上就是被鼻子挡住的位置,图2全部白色的范围实际上就是人眼的盲区,除了可以看到自己的鼻子和眼眶。
2.实际上只有∠cyg这个范围内观看到的事物才有立体感。
3.人单眼的舒适视域只有60度,也就是说观看到的物体和拍摄的照片以60度为最佳;立体摄影最大范围为单眼124度【(156-90-4)×2】,即为双镜头视线水平,双倍的视线到两眼内侧的角度,也就是∠ixg和∠czj。
立体电影(3D电影)

立体电影(3D电影)一、立体显示的原理要了解立体电影的原理,首先要了解人眼观察事物的过程。
人眼在观察外界物体时,不仅能看到物体的外形,还能够辨认物体的距离、物体之间的前后位置和取向等,这与人眼的三维视觉特性有关。
这些立体视觉信息大致可分为单眼信息和双眼信息。
他们由许多不同的感知线索组成,其中单眼信息的感知线索就包含有眼球的调节、视网膜上成像的相对大小、透视感、照明状况、单眼运动视差、视野等。
在这些线索中,除了眼球的调节是生理活动外,其他线索一般认为是心理感知。
心理感知多是通过人的习惯产生的,比如通过物体的近大远小、近明远暗、前后遮挡以及光线阴影等关系来感知立体影像。
很多图片和绘画作品就是利用这一特点让观众在平面作品上产生强烈的立体感。
由于亮眼具有约65mm的瞳距,因而人们用双眼观察物体时,物体在左右两眼视网膜上的成像是略有差异的,即双眼视差,它是立体视觉的重要线索。
另外,当物体成像不在左右两眼视网膜的对应点上时,所看到的便是两重像(复像),需要通过眼球的旋转运动(称为辐辏)并经眼外肌的张力调节而使两重像重合(称为融合),这个过程也为立体视觉提供重要信息。
一般来说,人们在观看立体图像时,如果辐辏与调节超出平衡范围,就会引起视觉疲劳。
单眼信息有时会出现偏差,而双眼信息的感知是比较真实的。
立体电影就是利用人的双眼视差来产生立体感的。
人在观察外界事物时,左右眼各看见三维景物的左侧和右侧的细节,在视网膜上形成有水平视差的两个相似的二维图像,这两个二维像经过复现,就形成了三维立体图像。
立体电影就是模拟人眼三维图像的形成过程,先把左右眼的单眼图像分别记录下来,通过放映机和相应的立体放映设备,让观众的左右眼分别看到相应的单眼图像,再经过大脑复现成三维立体图像。
在技术上,就是要实现左右双画面放映并分别映入观众的左右眼。
上述原理早在19世纪中期就被人们认识到了,所以在胶片电影发明后不久,有人就在尝试以各种方式和形式拍摄和放映立体电影,早期是利用红蓝(绿)眼镜来看立体电影,后来又发展到用偏振技术放映、观看立体电影。
第4章 双像立体测图基础与立体测图

1)立体镜观察法
桥式立体镜:简单但观察的范围小
在一个桥架上安置两个相同的简单透镜 透镜光轴平行,间距约为眼基距,高度等于透镜主距
反光立体镜
扩大眼基线,可对大像幅进行立体观察
①立体镜
竖直夸大
fc / f
fc: 像片距人眼的距离 f: 航摄像片的主距
竖直夸大有利于对高程差的判识,而对量测无影响。
2.立体量测
测标:一对光点 移动测标 固定测标
立体量测原理 量测的内容:
双测标量测法
像点坐标量测、左右视差量测、左右视差较量测、上下 视差量测。借助于有测量标志的量测工具或仪器进行。
测标的作用
测标的种类
4.2
立体像对与双像立体测图
1、立体像对的定义(Stereo Pair) 由不同摄站获取的,具有一定影像 重叠的两张像片。
所有同名光线对对相交,即同名点的上下视差为 零时,则相对定向完成。
2.投影器的微小运动对承影面上投影点位的影响
投影器距承影面的高度为H。 假设像片近似水平,选取像片上的九个像点来考 察投影点位的变化规律。 点位分布如下:
像主点
(1)微动 bu 的影响
Hale Waihona Puke dbu SS’ Y
X
总位移
X方向位移
Y方向位移
一、立体像对的相对定向与相对定向元素 确定一个立体像对两张像片相对位置和 姿态的元素称为相对定向元素。
相对定向只能确定两张像片的相对位置
立体像对中,确定两像空系之间方位关系 所需的元素。
完成相对定向的唯一标准是两像片上同 名光线对对相交。
2、两种相对方位元素系统 • 以左像空系为基础的相对方位元素系统 • 以基线坐标系为基础的相对方位元素系统
双像立体测图原理与立体测图

内 容 安 排
点击此处添加小标题
点击此处添加正文,请言简意赅的阐述观点。
目
点击此处添加小标题
录
点击此处添加正文,请言简意赅的阐述观点。
立同双
体一像
规 定 比 例 尺 的 地 形 图 或 建 立 数 字 地 面 模 型 等 。
几 何 模 型 , 并 对 该 几 何 模 型 进 行 量 测 , 直 接 给 出
§4-3立体像对的相对定向元素与模型的绝对定向元素
我们知道,一个像对的两张像片有十二个外方位元素,相对 定向求得五个元素后,要恢复像对的绝对位置,还要解求七个 绝对定向元素,包括模型的旋转、平移和缩放。它需要地面控 制点来解求,这种坐标变换,在数学上为一个不同原点的三维 空间相似变换,其公式为:
Xtp
03
交会作用
05
空间影像的形成
07
视差理论
02
双眼观察特点
交会作用与调节作用
04
的一致性
06
能够估计景深
08
人眼的天然立体视觉
§4-1双像立体测图原理与立体测图
一、人眼的天然立体视觉
视差理论 生理视差:
视差角
生理视差是产生立体感 觉的生理基础。
4-1双像立体测图原理与立体测图
一.人造立体视觉
在摄影测量中规定摄影时保持 像片的重叠度在60%以上,是 为了获得同一地面景物在相邻 两张像片上都有影像。
核面(主核面) 核线(主核线) 核点
P1 a1o1
n1
J
1
B S1
o2 a2 n2
S2
P2 J2
WA A
§4-2立体像对与立体测图原理
人类视觉生理特点

人类的视觉生理特点主要包括以下几个方面:1.分辨率高:人类视觉系统能够分辨非常小的物体和细节,这是因为眼睛中的视网膜上有大量的感光细胞,能够识别非常微小的光线变化。
2.宽动态范围:人类视觉系统能够适应不同亮度的环境,从非常明亮的阳光下到非常暗淡的夜晚都能够看清物体。
3.颜色感知:人类视觉系统能够感知物体的颜色,这是因为眼睛中的视锥细胞能够感知不同波长的光线,从而产生不同的颜色感知。
4.快速适应:人类视觉系统能够非常快速地适应不同环境下的光线和颜色,例如从室内到室外,从白天到夜晚。
5.空间感知:人类视觉系统能够感知物体的三维空间位置和形状,这是因为眼睛中的两个视网膜能够产生不同的图像,从而产生立体感知。
6.运动感知:人类视觉系统能够感知物体的运动和速度,这是因为眼睛中的视网膜能够感知光线的变化,从而产生运动感知。
7.光谱灵敏度:人眼可识别的电磁波长大约为400-800nm,同时含有400-800nm各色电磁波的光,称为白光。
人眼对不同的颜色的可见光灵敏程度不同,对黄绿色最灵敏,对白光较灵敏。
8.亮度和对比度感知:人眼能感受的亮度范围非常宽泛,可以感知从黑暗到明亮的亮度变化。
对比度感知则是指人眼对不同亮度之间的差异的感知能力。
9.立体视觉:人类的两只眼睛可以协同工作,提供深度感和立体感。
通过两只眼睛接收到的略微不同的视角信息,大脑可以分析出物体的距离和深度。
10.适应性:人眼具有一定的适应性,可以在长时间的相同光照条件下逐渐适应,例如从暗处到亮处或从亮处到暗处。
11.瞳孔调节:瞳孔可以根据光线强度的变化自动调节孔径大小,从而控制进入眼睛的光线量。
12.视觉疲劳:长时间注视同一物体或保持同一姿势会导致视觉疲劳。
适当休息和改变视线可以缓解视觉疲劳。
13.双眼视觉:人类的两只眼睛可以协同工作,提高视觉的分辨率和深度感。
14.眼睛运动:人类的眼睛可以进行快速而精细的运动,如扫视、追踪和聚焦等,以跟踪和理解动态的视觉场景。
人眼视觉特性

人眼视觉特性 Prepared on 22 November 2020人眼视觉特性1.各种视觉范围光谱范围:我们知道,光线可以分为两类,也就是我们常说的可见光与不可见光。
“可见”与“不可见”是以人眼能否直接观察到为衡量标准的。
那么,人眼可以观察到的光谱范围,到底是多少呢研究发现,人眼可以识别的光线波长范围为400nm—800nm,而光波在390—455nm 内呈紫色,在455—492呈蓝靛色,在492—577nm呈绿色,577—597nm呈黄色,597—622nm呈橙色,770~622nm呈红色。
而人眼能分辨色彩的原因为,在人眼的视网膜上有两种视觉细胞,即锥状细胞和杆状细胞。
锥状细胞分为三种,分别对红、绿、蓝三种色光最敏感,称为红感细胞、绿感细胞、蓝感细胞。
当一束光射入人眼时,三种锥状细胞就会产生不同的反应,不同颜色的光对三种锥状细胞的刺激量是不同的,产生的颜色视觉各异,使人能够分辨出各种颜色。
锥状细胞不但可以接受色彩的刺激,还可以感受亮度的刺激。
所以,在白光下,人眼可以同时识别彩色与非彩色的物体,但到了夜间或暗处,锥状细胞即失去感光作用,视觉功能由杆状细胞取代。
此时,人眼便无法感觉彩色,仅能辨别白色和灰色。
既然人眼可看到的光线具有不同的颜色,那么自然人眼对不同的颜色有不同的灵敏度。
在较亮的环境中人眼对黄光最为敏感,而在较暗的环境中对绿光最为敏感。
无论在何种明暗条件中,对白光都较敏感,对红光和蓝紫光都不敏感。
如果用一个尺度来衡量,那就相当于,人眼对黄绿色敏感度为10,对蓝红色敏感度为1。
亮度范围:人眼能感受的亮度范围约为10−3—106cd/m2(坎德拉每平方米,1坎德拉表示在单位立体角内辐射出1流明的光通量),当平均亮度适中时(亮度范围约为10—104cd/m2),能分辨的最大和最小亮度比为1000:1(当亮度为1000 cd/m2时,识别能力最高,有资料称:最小可识别黑度差ΔDmin≈; 当平均亮度很低时,能分辨的最大和最小亮度比不到10:1。
Removed_空间深度和立体视觉(1)

空间深度感与立体视觉我们生活的世界是三维的,但是这并不是大脑的视觉系统直接得到的结论,因为人眼是通过在视网膜上的成像来观察物体的,由于视网膜是二维的,所以在它上面生成的图像也是二维的,从视网膜上得到的信息来看,出现的事物应该是二维的,但我们看到的却是三维的世界。
这是因为人眼能产生立体视觉的重要基础是空间深度感。
人眼在观察物体时,能一定程度上定性的长生距离远近的感觉,这种远近的感觉叫做空间深度感。
无论是单眼还是双眼,观察时都有空间深度感,但双眼的深度感比单眼的强而且可靠。
1、单眼的深度感1)依据几个物体之间的相互遮蔽关系,判断其相对远近;2)对高度相同的物体,可依据其对应的视角来区分远近,视角大者距离较近。
这也就是常说的“近大远小”的来由;3)根据对物体细节的辨认程度也能比较物体的远近;4)通过眼肌收缩的紧张程度感知远近,但是这种感知只在近距离有效(2、3米内);5)依据经验对熟悉的物体判定远近。
2、双眼深度感与立体视觉双眼观察到时候,除了以上的因素产生深度感觉之外,最重要的因素就是视差。
人有两只眼,两眼之间有一定的距离,这就造成物体的影像在两眼中有一些差异,也就是左右眼会形成一个视差,而大脑会根绝这个视差来感觉到立体影像。
当人注视一个平面物体时,它的每一点都落在两眼视网膜的对应点上,视象互相吻合(图1)。
AB为平面物体,如果两眼注视物体中间的Z点,Z便落到双眼视网膜中央凹的z′、z″,A和B部分也落到双眼视网膜的对应部位a′、a″和b′、b″。
如将两眼视网膜重合起来,两个视象的位置是互相重合的,这时人就会知觉到一个平面的物体。
当人看一个立体物体时,两眼视象便不完全落到对应部位。
因为两眼之间有60~65毫米的目间距,所以左眼看物体的左边多些,右眼看物体的右边多些,两个视网膜象不完全重合,它们都偏向鼻侧(图2 )。
ABZ为一个立体(三角锥),当眼睛注视Z点时,Z便落到两眼中央凹的z′、z″点上,A和B分别落到a′、a″和b′、b″上。
单眼为什么也能有立体视觉

单眼为什么也能有立体视觉发表者:闵燕1209人已访问很多单眼人士都能够同双眼人一样熟练驾车,这其中的道理是怎样的呢?让我们看看关于立体视觉的一些知识吧。
双目立体视觉与单目立体视觉首先说说立体视觉(立体感)的概念。
人的立体感是这样建立的:双眼同时注视某物体,双眼视线交叉于一点,叫注视点,从注视点反射回到视网膜上的光点是对应的,这两点将信号转入大脑视中枢合成一个物体完整的像。
不但看清了这一点,而且这一点与周围物体间的距离、深度、凸凹等等都能辨别出来,这样形成的像就是立体的像,这种视觉即立体视觉。
欠缺立体视觉者称为立体盲。
立体盲可以是先天性的,也可能是后天疾病所致。
这里值得说明的是,弱视、斜视、屈光不正、屈光参差、甚至视疲劳等眼病、以及一些脑病都可能造成立体盲,所以立体盲在双眼人群中并不罕见。
立体视觉是人眼在观察事物时所具有的立体感。
再进一步讲,人眼对获取的景象有相当的深度感知能力,而这些感知能力又源自人眼可以提取出景象中的深度要素。
立体视觉的形成机制如下:1. 双目视差由于人的两只眼睛存在间距(平均值为6.5cm),因此对于同一景物,左右眼的相对位置是不同的,这就产生了双目视差,即左右眼看到的是有差异的图像。
2. 运动视差运动视差是由观察者和景物发生相对运动所产生的,这种运动使景物的尺寸和位置在视网膜的投射发生变化,使产生深度感。
3. 眼睛的调节功能(适应性调节)人眼的调节功能主要是指眼睛的主动调焦行为,是通过眼睛的晶状体进行精细调节的。
焦距的变化使我们可以看清楚远近不同的景物和同一景物的不同部位。
晶状体的调节是通过其附属肌肉的收缩和舒张来实现的,肌肉的运动信息反馈给大脑协助立体感形成。
4. 视差图像在人脑的融合融合,是大脑的高级功能。
双眼图像的融合过程,首先要依靠双眼在观察景物的同一会聚机制,即双眼的着眼点在同一点上。
这种机制使得人的左右眼和在景物上的着眼点构成了一个三角形。
通过这个三角形我们就可以判断出所观察的景物距人眼的距离了。
立体视觉

人的立体感是这样建立的:双眼同时注视某物体,双眼视线交叉于一点,叫注视点,从注视点反射回到视网膜上的光点是对应的,这两点将信号转入大脑视中枢合成一个物体完整的像。
不但看清了这一点,而且这一点与周围物体间的距再进一步讲,人眼对获取的景象有相当的深度感知能力(Depth Perception),而这些感知能力又源自人眼可以提取出景象中的深度要素(Depth Cue)。
之所以可以具备这些能力,主要依1. Binocular Parallax)6.5cm),因此对于同一景物,左右眼的相对位置(relative position)是不同的,这就产生了双目视差,即左右眼看到的是有差异的图像。
2. 运动视差(Motion Parallax)运动视差是由观察者(viewer)和景物(object)发生相对运动(relative movement)所产生的,这种运动使景物的尺寸和位置在视网膜的投射发生变化,使产生深度感。
3. 眼睛的适应性调节(Accommodation)人眼的适应性调节主要是指眼睛的主动调焦行为(focusing action)。
眼睛的焦距是可以通过其内部构造中的晶状体(crystal body)进行精细调节的。
焦距的变化使我们可以看清楚远近不同的景物和同一景物的不同部位。
一般来说,人眼的最小焦距为1.7cm,没有上限。
而晶状体的调节又是通过其附属肌肉的收缩和舒张来实现的,肌肉的运动信息反馈给大脑有助于立体感的建立。
4. 视差图像在人脑的融合(Convergence)双眼图像的融合过程,首先要依靠双眼在观察景物的同一会聚机制(converging action),即双眼的着眼点在同一点上。
这种机制使得人的左右眼(人的左右眼距是确定的)和在景物上的着眼点(左右眼分别到着眼点的光轴—z-axis与双眼距线段构成的两个夹角是确定的)在几何上构成了一个确定的三角形。
通过这个三角形我们就可以判断出所观察的景物距人眼的距离了。
双眼立体视觉实验探索双眼立体视觉的成像原理
对视差图中的数据进行统计分析,可以得到视差的范围和 分布情况。一般来说,近距离物体的视差较大,远距离物 体的视差较小。
视差与深度的关系
根据视差的大小,可以推断出物体在三维空间中的深度信 息。视差越大,物体距离观察者越近;视差越小,物体距 离观察者越远。
深度感知能力评估
深度感知阈值测定
通过实验测定观察者对深度感知的最小视差变化量,即深 度感知阈值。该指标能够反映观察者的深度感知能力。
数据收集与整理
数据收集
收集被试的双眼视差测量结果、深度感知测试 结果以及相关信息。
数据整理
对收集到的数据进行整理、分类和统计分析, 提取有用信息。
结果呈现
将实验结果以图表、数据表等形式呈现出来,以便后续分析和讨论。
05
实验结果与分析
双眼视差数据分析
视差图生成
通过图像处理技术,将左右眼图像进行匹配和比较,生成 视差图。视差图能够直观地展示双眼视差的大小和分布。
06
结论与展望
实验结论总结
双眼立体视觉基于视差原 理
实验证实,双眼立体视觉主要依赖于左右眼 接收到的略微不同的图像,通过大脑处理形 成三维立体感知。
融合机制重要性
双眼图像在视觉皮层中的融合是立体视觉形成的关 键步骤,该机制确保了空间深度和物体形状的准确 感知。
影响因素多样性
实验发现,立体视觉的感知受到多种因素影 响,包括光线条件、物体距离、观察角度以 及个体生理差异等。
双眼融合形成单一图像
1 2 3
对应点融合
大脑通过一种称为对应点融合的机制,将左、右 眼视网膜上的图像融合在一起,形成一个单一的 、具有立体感的视觉图像。
融合范围
双眼融合的范围是有限的,通常在一定角度内的 物体能够被有效地融合。超出这个范围,物体可 能被视为重影或无法融合。
40.立体视觉
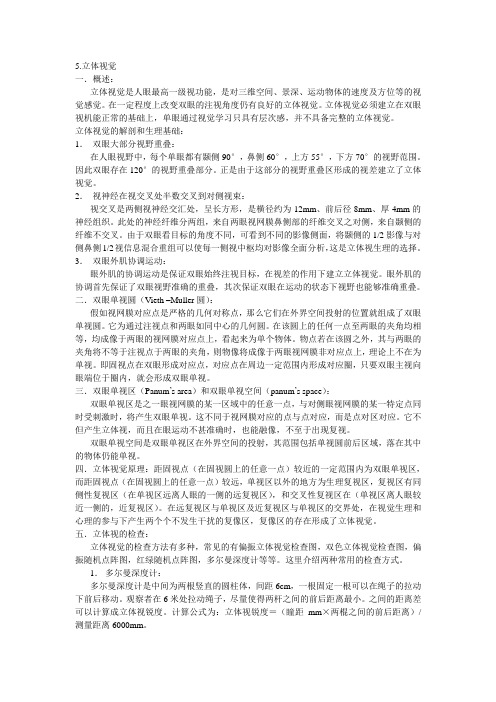
5.立体视觉一.概述:立体视觉是人眼最高一级视功能,是对三维空间、景深、运动物体的速度及方位等的视觉感觉。
在一定程度上改变双眼的注视角度仍有良好的立体视觉。
立体视觉必须建立在双眼视机能正常的基础上,单眼通过视觉学习只具有层次感,并不具备完整的立体视觉。
立体视觉的解剖和生理基础:1.双眼大部分视野重叠:在人眼视野中,每个单眼都有颞侧90°,鼻侧60°,上方55°,下方70°的视野范围。
因此双眼存在120°的视野重叠部分。
正是由于这部分的视野重叠区形成的视差建立了立体视觉。
2.视神经在视交叉处半数交叉到对侧视束:视交叉是两侧视神经交汇处,呈长方形,是横径约为12mm、前后径8mm、厚4mm的神经组织。
此处的神经纤维分两组,来自两眼视网膜鼻侧部的纤维交叉之对侧,来自颞侧的纤维不交叉。
由于双眼看目标的角度不同,可看到不同的影像侧面,将颞侧的1/2影像与对侧鼻侧1/2视信息混合重组可以使每一侧视中枢均对影像全面分析,这是立体视生理的选择。
3.双眼外肌协调运动:眼外肌的协调运动是保证双眼始终注视目标,在视差的作用下建立立体视觉。
眼外肌的协调首先保证了双眼视野准确的重叠,其次保证双眼在运动的状态下视野也能够准确重叠。
二.双眼单视圆(Vieth –Muller圆):假如视网膜对应点是严格的几何对称点,那么它们在外界空间投射的位置就组成了双眼单视圆。
它为通过注视点和两眼如同中心的几何圆。
在该圆上的任何一点至两眼的夹角均相等,均成像于两眼的视网膜对应点上,看起来为单个物体。
物点若在该圆之外,其与两眼的夹角将不等于注视点于两眼的夹角,则物像将成像于两眼视网膜非对应点上,理论上不在为单视。
即固视点在双眼形成对应点,对应点在周边一定范围内形成对应圈,只要双眼主视向眼端位于圈内,就会形成双眼单视。
三.双眼单视区(Panum’s area)和双眼单视空间(panum’s space):双眼单视区是之一眼视网膜的某一区域中的任意一点,与对侧眼视网膜的某一特定点同时受刺激时,将产生双眼单视。
2-第二章人类视觉与色度学知识

对比度C定义为:C=Bmax/Bmin。
Bmax和Bmin是重现图象或景物时的最大和最小亮度。
只要保持该C常数,就可实现人眼亮度分辨的重现。
二、人眼的分辨力 1.分辨角和分辨力 人眼的分辨角:指刚能看出两黑点时,两黑点对人眼的张角。 在量值上,分辨角用 表示,有分辨角计算原理图可知:
2.2.2相对视敏函数
人眼对波长为380~780nm内不同波长的光具有不同 的敏感程度,称为人眼的视敏特性,描述人眼视敏特性 的物理量为视敏函数和相对视敏函数。
1)视敏函数
在相同亮度感觉的条件下,不同波长光辐射功率 P ( ) 的 倒数用来衡量人眼对各波长光明亮感觉的敏感程度。称:
K ( ) 1 P( ) 为视敏函数。
2.3.3 视觉适应性
1.人眼适应性 (1) 暗适应:亮→暗:慢(10~30秒左右) (2) 亮适应:暗→亮:快(1~2秒左右)
2 .同时对比效应 由于人眼对亮度有很强的适应性,因此很难精确判断刺激 的绝对亮度。即使有相同亮度的刺激,由于其背景亮度不同, 人眼所感受的主观亮度是不一样的。图2.9可用来证明同时对 比的刺激,图中小方块实际上有着相同的物理亮度,但因为 与它们的背景亮度不同,故它们的主观亮度显得大不一样。 这种效应就叫同时对比效应。
图2.4相对视敏函数曲线
2.2.3光学的术语和计量单位
光通量:每秒钟内光流量的度量。单位:流明(lm)。 发光强度:光源在单位立体角内发出的光通量,用符号 表示 。单位:坎德拉(cd)。 亮度:用来描述物体表面发光的量度,光源单位面积上 I 在法线方向上的发光强度来表示,记为B,单位是:单位 面积上的坎德拉,cd / m2 。是客观亮度。 照度:受照面上某点的照度是通过包含该点单位面积的 光通量。
立体电影的科学原理
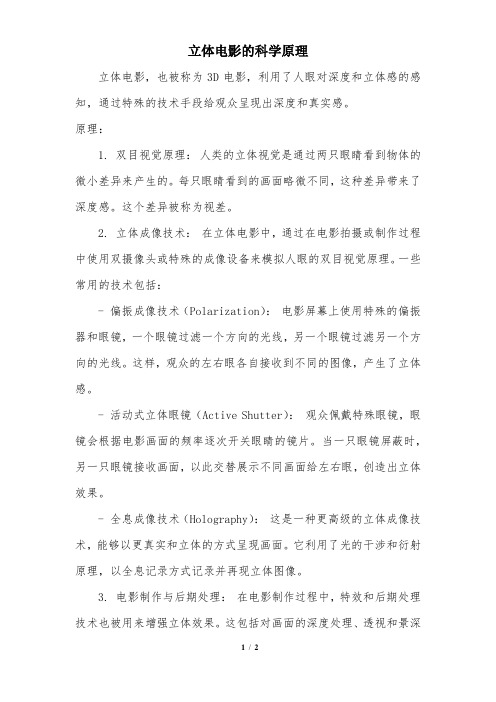
立体电影的科学原理
立体电影,也被称为3D电影,利用了人眼对深度和立体感的感知,通过特殊的技术手段给观众呈现出深度和真实感。
原理:
1. 双目视觉原理: 人类的立体视觉是通过两只眼睛看到物体的微小差异来产生的。
每只眼睛看到的画面略微不同,这种差异带来了深度感。
这个差异被称为视差。
2. 立体成像技术: 在立体电影中,通过在电影拍摄或制作过程中使用双摄像头或特殊的成像设备来模拟人眼的双目视觉原理。
一些常用的技术包括:
- 偏振成像技术 Polarization): 电影屏幕上使用特殊的偏振器和眼镜,一个眼镜过滤一个方向的光线,另一个眼镜过滤另一个方向的光线。
这样,观众的左右眼各自接收到不同的图像,产生了立体感。
- 活动式立体眼镜 Active Shutter): 观众佩戴特殊眼镜,眼镜会根据电影画面的频率逐次开关眼睛的镜片。
当一只眼镜屏蔽时,另一只眼镜接收画面,以此交替展示不同画面给左右眼,创造出立体效果。
- 全息成像技术 Holography): 这是一种更高级的立体成像技术,能够以更真实和立体的方式呈现画面。
它利用了光的干涉和衍射原理,以全息记录方式记录并再现立体图像。
3. 电影制作与后期处理: 在电影制作过程中,特效和后期处理技术也被用来增强立体效果。
这包括对画面的深度处理、透视和景深
调整等手段,以增强观影体验。
综合来看,立体电影的原理是利用人眼双目视觉的特性,通过特殊的成像技术和电影制作技术,以呈现两个稍微不同的图像给左右眼,观众佩戴特殊眼镜,在大银幕上产生立体的、有深度感的观影体验。
《眼科与视功能检查》——14.立体视觉检查概述课件
立体视觉能力 弱视检测 斜视诊断 手术评估
斜视诊断:斜视是一种眼球无法同时准确对准同 一目标的条件。立体视觉检查可以帮助医生评估 斜视患者的立体视觉能力,并确定斜视类型和程 度。
立体视觉检查概述
意义
立体视觉能力 弱视检测 斜视诊断 手术评估
手术评估:立体视觉检查也常被用于评估患者是 否适合进行某些眼部手术,如白内障手术。通过 检查患者的立体视觉能力,医生可以确定手术后 患者的视觉恢复情况。
立体视觉检查概述
应用
01 视觉感知测试 02 视觉深度测试 03 斜视测试 04 弱视测试
视觉深度测试:这 种测试通常使用立 体图像或立体观察 器,要求被测试者 根据深度信息判断 物体的位置或距离。 例如,被测试者可 能需要判断哪个物 体在前面或后面, 或者按照顺序排列 图像中的物体。
立体视觉检查概述
立体视觉检查概述
意义
立体视觉能力 弱视检测 斜视诊断 手术评估
弱视检测:立体视觉检查也可以用于检测弱视 (常称为"懒眼")。弱视是一种常见的儿童眼部 问题,指的是由于眼睛未能正常发展而导致的视 觉模糊或减弱。通过立体视觉检查,医生可以评 估患者的立体视觉能力,从而确定是否存在弱视。
立体视觉检查概述
立体视觉检查概述
原理
原理
视差提取 视差匹配
立体感知
立体视觉检查概述
原理
1.视差提取:大脑会比较两只眼睛接收到的图像,并提取出其中的视差信息。 视差越大,表示物体离眼睛越近;视差越小,表示物体离眼睛越远。
立体视觉检查概述
原理
2.视差匹配:大脑会将两只眼睛接收到的图像进行匹配,找出相同物体在两只 眼睛中的对应点。这个过程称为视差匹配。
3D技术简介
全息技术
•全息技术是利用光波的干涉和衍射原理记录 并再现物体的真实感的一种成像技术。 •全息技术再现的图像立体感强,具有真实的 视觉效应。除用光波产生全息图外,现在 已发展到可用计算机产生全息图,然而需 要的计算量极其巨大。 •全息术应该是3D显示的终极解决方案,但目 前还有很多技术问题有待解决,短期内难 有成熟产品量产。
• 3.软阴影(Soft Shadow) 软阴影( 软阴影 ) • 从字面上直译过来就是 “软阴影”,不过叫“柔 和阴影”似乎更合适。我 们知道生活中很多阴影的 过渡都是有渐变,而软阴 影的作用就是要模拟这种 效果,在阴影周边制造虚 化的效果。软阴影本身并 不是指一种技术,而是指 通过采用某种技术达到的 效果。
• 4.次表面散射(SubSurface 次表面散射( 次表面散射 Scattering,简称3S)它主 ,简称 ) 要用于模拟不完全透明材质 内部表现出的一种真实光影 特效。当灯光照射到玻璃或 清澈的液体表面时,灯光会 穿透这些介质,3S效果可用 来模拟灯光进入介质内部后 发生的散射。 3S的另一个重 要用处在于表现光源照射下 的人物皮肤,换句话说,要 想表现真实的皮肤材质,3S 效果必不可少。目前的许多 游戏在人物皮肤的渲染上就 因为缺乏3S效果而显得塑料 化、橡胶化。
• 下面简单介绍下,现在市场上流行的偏光 式3D技术。 • 偏光式3D也叫偏振式3D技术,属于被动式 3D技术。 。 • 优点:偏光式眼镜价格低廉,3D效果出色, 市场份额大 缺点:安装调试繁琐,成本不便宜
偏光式3D技术 偏光式 技术
主要原理: • 偏振立体眼镜与偏振的片源配合,片源通过奇偶 帧分别播放左眼和右眼的信号,通过立体分配分 开,进入两个投影机,通过偏振光透射而出,偏 振眼镜两个眼睛分别允许不同偏振光进入,于是 就接收了各自眼睛的信号,最终产生了立体感。 • 偏光式3D也细分出了很多种类,比如应用于投影 机行业的偏光式3D需要两台以上性能参数完全相 同的投影机才能实现3D效果,而应用于电视行业 的偏光式3D技术则需要画面具有240Hz或者 480Hz以上的刷新率
三维立体画是利用人眼立体视觉现象制作的绘画作品普通...
一、概述三维立体画是利用人眼立体视觉现象制作的绘画作品。
普通绘画和摄影作品,包括电脑制作的三维动画,只是运用了人眼对光影、明暗、虚实的感觉得到立体的感觉,而没有利用双眼的立体视觉,一只眼看和两只眼看都是一样的。
充分利用双眼立体视觉的立体画,将使你看到一个精彩的世界。
二、立体视觉原理人有两只眼,两只眼有一定距离,这就造成物体的影像在两眼中有一些差异,见右图,由图可见,由于物体与眼的距离不同,两眼的视角会有所不同,由于视角的不同所看到是影像也会有一些差异,大脑会根据这种差异感觉到立体的景象。
三、立体画原理三维立体画就是利用这个原理,在水平方向生成一系列重复的图案,当这些图案在两只眼中重合时,就看到了立体的影像。
参见下图,这是一幅不能再简单的立体画了。
图中最上一行圆最远,最下一行圆最近,请注意:最上一行圆之间距离最大,最下一行圆之间距离最小。
这是怎么发生是呢?让我们再看下图,从图中我们可以看到,重复图案的距离决定了立体影像的远近,生成三维立体画的程序就是根据这个原理,依据三维影像的远近,生成不同距离的重复图案。
四、立体画的观看如果你现在还不会看立体画,是不是已经很着急了,下面我将介绍怎样看立体画。
立体画有两种形式:第一种是由相同的图案在水平方向以不同间隔排列而成,看起来是远近不同的物体,请看下图。
这样的立体画可用任意一种图像处理软件制作,如Photoshop、Windows画笔等,你也可以一试。
另一种立体画较复杂,在这种立体画上你不能直接看到物体的形象,画面上只有杂乱的图案,制作这样的立体画只有使用程序了,我为此编写了一些程序,有C和Q BASIC的源程序,请看自制立体画和程序下载。
两种作品看法是一样的,原理都是使左眼看到左眼的影象,让右眼看到右眼的影象,(有人说了:你这不是废话吗?)听我说具体的方法:当你看立体画时,你要想象你在欣赏玻璃橱窗中的艺术品,也就是说你不要看屏幕上的立体画,而要把屏幕看成是玻璃橱窗的玻璃,你要看的是玻璃之内的影象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人眼的立体视觉特性
立体显示技术是以人眼的立体视觉原理为依据的。
因而,研究人眼的立体视觉机理,掌握立体视觉规律,对研究和设计新的立体显示系统是十分必要的。
人之所以能够产生立体视觉是因为人有两只眼睛,当左右两只眼睛从不同的角度去看某一个物体时,在左右眼视网膜上所成的图像是有差异的,人的大脑可以根据这种图像差异来判断物体的空间位置关系,从而使人产生立体视觉。
这一原理称为双目视差原理。
一、双眼立体信息
用双眼观看空间景物时,形成立体视觉的因素称为双眼立体信息。
双眼立体信息是人眼立体视觉的主要因素。
人的两眼相距约58~72mm。
因此,用双眼同时观看同一物体时,左、右两眼视线方位不同,物体在左、右两眼视网膜上所成的像亦稍有差异。
称这种差异为双眼视差。
如图所示:
当用双眼观看一个立方体时,如果左眼只看到立方体的前平面和上平面,而右眼除了能看到这两个平面外,还能看到立方体的右侧平面。
此外,即使是左、右两眼都能看到的前平面和上平面,在左、右眼视网膜上所成的像也稍有差异。
双眼视差的大小与空间物体的位置有决定性的关系。
因而,检测双眼视差的大小即可辨别物体的深度。
如上图可以定义双眼视差:
图中L、R分别为左、右眼,P为两眼瞳孔间的距离,D为视距,△D为深度距离,F1和F2为两个物体或同一物体上的两个点。
由上式可知,视差与深度距离△D成正比,而与视距的平方成反比。
二、分时显示与立体视觉
以上讨论的双眼视差是在左、右两眼同时接受图像刺激的情况即同时立体视觉,如果进入左、右眼的视差图像信息在时间上不是同时显示而存在某种程度的滞后的话,这时立体视觉的规律将不同于同时视觉。
视差图像滞后显示也称为分时显示。
分时显示所形成的立体视觉既与滞后时间有关,也与先行显示的视差图像的显示时间有关.下图给出一分时显示滞后时间对立体视觉的影响的实验曲
线。
图中曲线是在先行显示图像的显示时间为18ms条件下,立体规觉与分时显示滞后时间的关系。
曲线表明,滞后时间小于20ms时,分时显示的双眼视差图像所产生的立体视觉与同时视觉产生的立体视觉基本相同;分时显示滞后时间大于20ms时,分时显示的立体视觉减弱;当滞后时间超过100ms时,立体视觉将不能形成。
实验还表明,分时显示的立体视觉与滞后时间的关系还和先行显示图像的显示时间有关。
当先行图像显示时间超过375ms时,分时显示已不能产生立
体视觉。
这种情况下,必须同时显示才能形成立体视觉。
由上述分析可知要形成立体视觉必须将两幅具有视差的图像同时或分时送入左眼和右眼并保证左眼只看到左视差图像右眼只看到右视差图像,若采用分时方式显示两幅视差图像时,其时间间隔必须小于20ms。