步进电机控制程序(c语言+51单片机)
MCS-51单片机对步进电机控制的实现
(hnj n nier g ct nl o eeC ii 33 2C ia C agi g gnei a oa U g, hb 4 70 , hn) a E n Vo i C
Ab t a t :T e d u l — u - a o t l n t o i h 8 3 CM p f s t t p i g mo o s i t u e sr c h o be f rp tc n r l g me h d wh c 0 S o o i 1 a p e o se p n t r i n r i o c d. d S meu u r b e n o n r a u e e p o l ms r n l z d o s a p o lmsa d c u t me s st t r b e e a ay e . l e r oh a Ke r s s p i gm o o ; CM y wo d : e p n t r S t
V o .4 12 NO. 2 J n 0 u e 2 07
MC 一1 S5 单片机对 步进 电机控 制 的实现
曾 崧 日
( 长江工程职业技术学院 ,湖北 赤壁 4 70 ) 3 32
摘 要:介绍]83单片机对步进电机的双四拍的控制方法,以及常出现的问题及解决方案。 '0 1 关键词:步进电机;步距角;单片机
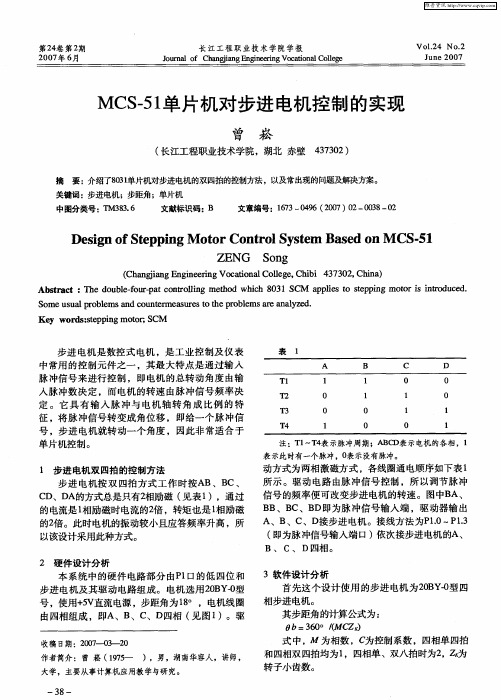
1 步 进 电机双 四拍 的控 制方 法
表
1
注 :T 一T 表 示脉冲周期 ;A C 1 4 B D表示电机的各相 ,1
表 示此 时有一个脉冲 , 表 示没有脉冲。 0
动方式为两相激磁方 式 ,各线圈通电顺序如下表 1
步进 电机按 双 四拍方式 工作 时按A B、B C、 C D、D 的方式总是 只有2 A 相励磁 ( 见表 1 ),通过 的电流是 1 相励磁时电流的2 ,转矩也是 1 倍 相励磁 的2 。此时电机 的振动较小且应答频 率升高 ,所 倍 以该设计采用此种方式。
c语言实现单片机控制步进电机加减速源程序
C 语言实现单片机控制步进电机加减速源程序1. 引言在现代工业控制系统中,步进电机作为一种常见的执行元件,广泛应用于各种自动化设备中。
而作为一种常见的嵌入式软件开发语言,C 语言在单片机控制步进电机的加减速过程中具有重要的作用。
本文将从单片机控制步进电机的加减速原理入手,结合 C 语言的编程技巧,介绍如何实现单片机控制步进电机的加减速源程序。
2. 单片机控制步进电机的加减速原理步进电机是一种能够精确控制角度的电机,它通过控制每个步骤的脉冲数来实现旋转。
在单片机控制步进电机的加减速过程中,需要考虑步进电机的加速阶段、匀速阶段和减速阶段。
在加速阶段,需要逐渐增加脉冲的频率,使步进电机的转速逐渐增加;在匀速阶段,需要保持恒定的脉冲频率,使步进电机以匀速旋转;在减速阶段,需要逐渐减小脉冲的频率,使步进电机的转速逐渐减小。
这一过程需要通过单片机的定时器和输出控制来实现。
3. C 语言实现步进电机加减速的源程序在 C 语言中,可以通过操作单片机的 GPIO 来控制步进电机的旋转。
在编写源程序时,需要使用单片机的定时器模块来生成脉冲信号,以控制步进电机的旋转角度和速度。
以下是一个简单的 C 语言源程序,用于实现步进电机的加减速控制:```c#include <reg52.h>void main() {// 初始化定时器// 设置脉冲频率,控制步进电机的加减速过程// 控制步进电机的方向// 控制步进电机的启停}```4. 总结与回顾通过本文的介绍,我们了解了单片机控制步进电机的加减速原理和 C 语言实现步进电机加减速源程序的基本思路。
掌握这些知识之后,我们可以更灵活地应用在实际的嵌入式系统开发中。
在实际项目中,我们还可以根据具体的步进电机型号和控制要求,进一步优化 C 语言源程序,实现更加精准和稳定的步进电机控制。
希望本文能为读者在单片机控制步进电机方面的学习和应用提供一定的帮助。
5. 个人观点与理解在我看来,掌握 C 语言实现单片机控制步进电机加减速源程序的技术是非常重要的。
单片机控制步进电机系统(C语言源代码)
说明: 本系统中采用了四个按键,分别与 80s52 的四个引脚相连,分别为 LCDEN,RS,WR,RD;
分别实现的功能是电机加速,减速,正反转。键盘一旦按下则表示向单片机发送了有效信号, 单片机就相应的进行调节。对于键盘的键按下的时候分为几个步骤,当键盘按下的时候,接 通电路,键盘扫描检测低电平,但检测到低电平之后不能够判断键是否被按下,因为抖动可 能引起这个变化,所有大概延时 5~10ms 之后再进行检测。如果再次检测到低电平之后说明 键被按下。这个过程就是所说的消除抖动。 3.3 显示部分 如图 5
Key Words:SCM; stepper motor; system; drive
目录
引言 4 1 单片机控制步进电机的一般原理 4 1.1 步进电机 4
1.1.1 步进电机介绍 4 1.1.2 步进电机分类 5 1.1.3 技术指标 5 1.1.4 步进电机工作原理 5 1.2 单片机 7 2 步进电机驱动实现 8 2.1 简介 8 2.2 驱动选择 8 3 系统硬件设计 9 3. 1 单片机控制电机 9 3.2 键盘 9 3.3 显示部分 10 程序流程图 11 总结 12 致 谢 13 参考文献 13 附录 13 C 代码 13
In this paper, given the design of the system hardware circuit,software design, human-computer interaction and so on.and it given the details description of each functional module.the main contents include the following:
功能特性描述
51单片机实现步进电机控制
摘要8051单片机控制步进电机进行简单的转速控制,包括启停变换转速控制等。
利用利用单片机实验箱以模拟电压提供电机转速设定值,使用并行模数转换芯片ADC0809 进行电压信号的采集和数据处理转换得到速度给定的数字量,通过单片机的P1 口控制步进电机的控制端,使其按一定的控制方式进行转动。
调节步进电机转速,使其与给定值相当,最后,利用ZLG7290模块驱动LED数码管显示速度设定值。
通过这个单片机控制系统的设计来掌握A/D转换的原理,了解步进电机的工作原理,掌握它的转速控制方式和调速方法,并且掌握LED显示原理和ZLG7290模块的使用方法,用LED数码管显示模数转换的结果,设计电路的硬件接线图和实现上述要求的程序。
最后实现通过改变模拟电压就可以改变步进电机的转速控制,并且在LED 数码管上显示步进电机的转速这一功能。
关键词:51单片机调速步进电机LED显示绪论在进行51单片机的学习和实验过程中曾利用51单片机对步进电机进行过简单的控制,包括利用单片机试验箱对步进电机进行转角控制,方向控制等。
即按照设定的转动角度步进电机进行动作,来实现步进电机的实时控制,通过设定的方向来实现步进电机的方向反转控制等,并利用利用ZLG7290模块驱动LED数码管显示步进电机的设定值与步进电机实际所转过过的角度,同时显示步进电机的旋转方向等。
这次所进行的步进电机转速控制系统是对步进电机的另一种控制,即实现步进电机的转速控制而不是单单的转动角度控制,并且是通过模拟量输入来时时的控制步进电机的转速。
并且通过数码管来显示出所设定的步进电机的转速。
第一章系统程序及分析1.1对步进电机控制系统的设计要求进行设计,主程序程序如下:#include<reg51.h>#include"VIIC_C51.h"#include"zlg7290.h"sbit PA=P1^0;sbit PB=P1^1;sbit PC=P1^2;sbit PD=P1^3;sbit SDA=P1^7;sbit SCL=P1^6;sbit RST=P1^4;sbit KEY_INT=P1^5;unsigned char xdata *port;unsigned char count,count1=0,c[3],n;/*****************ADC0809*******************************************/int1()interrupt 2{count=*port;*port=0;}/*******************************************************************//*****************延迟函数*****************************************/delay(unsigned int t){unsigned int i;for(i=0;i<t;i++){TMOD=0X11;TH0=-500/256;TL0=-500%256;TR0=1;while(TF0!=1);TF0=0;}}/*****************脉冲函数********************************************/ time1()interrupt 3{if(count==0X00)count1=4;TH1=-3*1000000/(256*count);TL1=-3*1000000%(256*count);switch(count1){ case 0:{PA=1;PB=1;PC=0;PD=0;}break;case 1:{PA=0;PB=1;PC=1;PD=0;}break;case 2:{PA=0;PB=0;PC=1;PD=1;}break;case 3:{PA=1;PB=0;PC=0;PD=1;}break;default:{PA=0;PB=0;PC=0;PD=0;}}count1++;if(count1>=4){count1=0;}}/************************主函数*******************************************/ main(){ RST=0;delay(1);RST=1;delay(10);port=0x7ff8;EA=1;ET1=1;ET0=1;TMOD=0X11;TH1=-100000/256;TL1=-100000%256;TR1=1;EX1=1;IT1=1;*port=0;while(1){c[0]=count/100;c[1]=count%100/10;c[2]=count%10;for(n=0;n<3;n++)ZLG7290_SendCmd(0x60+(2-n),c[n]);}}1.2程序分析:程序的开头包含了3个头文件,第一个头文件<reg51.h>中对所有的特殊功能寄存器进行了SFR定义,只要引用了<reg51.h> 就可以直接引用特殊功能寄存器名。
(毕业设计)基于单片机的步进电机控制系统(汇编及C语言程序各一个)

基于单片机的步进电机控制系统设计前言步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用,大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
1.步进电机原理及硬件和软件设计1.1步进电机原理及控制技术由于步进电机是一种将电脉冲信号转换成直线或角位移的执行元件,它不能直接接到交直流电源上,而必须使用专业设备一步进电机控制驱动器,典型步进电机控制系统如图1所示:控制器可以发出脉冲频率从几赫兹到几千赫兹可以连续变化的脉冲信号,它为环形分配器提供脉冲序列,环形分配器的主要功能是把来自控制环节的脉冲序列按一定的规律分配后,经过功率放大器的放大加到步进电机驱动电源的各项输入端,以驱动步进电机的转动,环形分配器主要有两大类:一类是用计算机软件设计的方法实现环形分配器要求的功能,通常称软环形分配器。
基于51单片机的步进电机控制系统设计与实现

步进电机工作原理
步进电机是一种基于磁场的控制系统,工作原理是当电流通过定子绕组时,会 产生一个磁场,该磁场会吸引转子铁芯到相应的位置,从而产生一定的角位移。 步进电机的角位移量与输入的脉冲数量成正比,因此,通过控制输入的脉冲数 量和频率,可以实现精确的角位移和速度控制。同时,步进电机具有较高的分 辨率和灵敏度,可以满足各种高精度应用场景的需求。
二、系统设计
1、硬件设计
本系统主要包括51单片机、步进电机、驱动器、按键和LED显示等部分。其中, 51单片机负责接收按键输入并控制步进电机的运动;步进电机用于驱动负载运 动;驱动器负责将51单片机的输出信号放大,以驱动步进电机。LED显示用于 显示当前步进电机的状态。
2、软件设计
软件部分主要包括按键处理、步进电机控制和LED显示等模块。按键处理模块 负责接收用户输入,并根据输入控制步进电机的运动;步进电机控制模块根据 按键输入和当前步进电机的状态,计算出步进电机下一步的运动状态;LED显 示模块则负责实时更新LED显示。
三、系统实现
1、按键输入的实现
为了实现按键输入,我们需要在主程序中定义按键处理函数。当按键被按下时, 函数将读取按键的值,并将其存储在全局变量中。这样,主程序可以根据按键 的值来控制步进电机的转动。
2、显示输出的实现
为了实现显示输出,我们需要使用单片机的输出口来控制显示模块的输入。在 中断服务程序中,我们根据设定的值来更新显示模块的输出,以反映步进电机 的实时转动状态。
基于单片机的步进电机控制系统需要硬件部分主要包括单片机、步进电机、驱 动器、按键和显示模块等。其中,单片机作为系统的核心,负责处理按键输入、 控制步进电机转动以及显示输出等功能。步进电机选用四相八拍步进电机,驱 动器选择适合该电机的驱动器,按键用于输入设定值,显示模块用于显示当前 步进电机的转动状态。
单片机原理及接口技术(C51编程)单片机各种应用设计

unsigned long freq;
//定义频率
unsigned char code table[]={0x3f,0x06,0x5b,0x4f, 0x66,0x6d,
0x7d,
0x07, 0x7f,0x6f,0x77,0x7c, 0x39,0x5e,0x79,0x71};
//共阴数码管段码表
void delay_1ms(unsigned int z) { //函数功能:延时约1ms
#define out P2
sbit pos=P0^0;
//定义检测正转控制位P0.0
sbit neg=P0^1;
//定义检测反转控制位P0.1
void delayms(uint);
uchar code
turn[]={0x02,0x06,0x04,0x0c,0x08,0x09,0x01,0x03};
步进电机是将脉冲信号转变为角位移或线位移的开环控 制元件。
非超载的情况下,电机转速、停止位置只取决于脉冲信 号的频率和脉冲数,而不受负载变化的影响,给电机加一脉 冲信号,电机则转过一个步距角。因而步进电机只有周期性 误差而无累积误差,在速度、位置等控制领域有较为广泛的 应用。
12.1 单片机控制步进电机的设计
12.2 单片机控制直流电机
2. 电路设计与编程
当P3.6=1时,P3.7发送PWM波,直流电机正转。且 可通过“INC”和“DEC”两个按键来增大和减少直流电机 转速。反之,P3.6=0时,P3.7发送PWM信号,直流电机反 转。
因此,增大和减小电机转速,实际上是通过按下 “INC”或“DEC”按键来改变输出PWM信号占空比,控 制直流电机转速。图12-4中驱动电路使用了NPN低频、低 噪声小功率达林顿管 2SC2547。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
51单片机驱动步进电机的方法
51单片机驱动步进电机的方法一、步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构,广泛应用于各种自动化设备中。
其工作原理是,当一个脉冲信号输入时,电机转动一个步距角,从而实现电机的精确控制。
二、51单片机驱动步进电机的方法1、硬件连接需要将51单片机与步进电机连接起来。
通常,步进电机需要四个引脚,分别连接到单片机的四个GPIO引脚上。
同时,还需要连接一个驱动器来提高电机的驱动能力。
2、驱动程序编写接下来,需要编写驱动程序来控制步进电机的转动。
在51单片机中,可以使用定时器或延时函数来产生脉冲信号,然后通过GPIO引脚输出给电机。
同时,还需要设置电机的步距角和转向,以保证电机的精确控制。
3、示例程序以下是一个简单的示例程序,用于演示如何使用51单片机驱动步进电机:cinclude <reg52.h> //包含51单片机的头文件sbit motorPin1=P1^0; //定义连接到P1.0引脚的电机引脚sbit motorPin2=P1^1; //定义连接到P1.1引脚的电机引脚sbit motorPin3=P1^2; //定义连接到P1.2引脚的电机引脚sbit motorPin4=P1^3; //定义连接到P1.3引脚的电机引脚void delay(unsigned int time) //延时函数unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);void forward(unsigned int step) //正转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin1=1;motorPin3=1;motorPin2=0;motorPin4=0; //设置转向和步距角delay(step); //延时一段时间void backward(unsigned int step) //反转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin2=1;motorPin4=1;motorPin3=0;motorPin1=0; //设置转向和步距角delay(step); //延时一段时间void main() //主函数unsigned int step=1000; //设置步距角为1000微步forward(step); //正转一圈backward(step); //反转一圈while(1); //循环等待,保持电机转动状态在这个示例程序中,我们使用了四个GPIO引脚来控制步进电机的转动。
基于C51单片机步进电机综合控制实验

重庆工商大学计算机与信息工程学院学院《单片机原理及应用》课程实验报告实验名称:步进电机综合控制实验实验班级:2010级自动化专业班级:2010级自动化三班指导老师:文远熔组员:陶园2010133330 王路2010133344江洋2010133335陈娅2010133326张琴芳2010133317张丹2010133320(组长)一、摘要:本实验利用8051单片机达到控制步进电机的启动、停止、正转、反转、点动、转过指定角度、状态显示和数据指示的目的,使步进电机控制更加灵活。
步进电机驱动芯片采用ULN2003,ULN2003具有大电流、高电压,外电路简单等优点。
利用ZLG7290模块驱动LED数码管显示速度设定值。
通过这个单片机控制系统的设计来掌握步进电机的工作原理和驱动过程以及LED显示原理和ZLG7290模块的使用方法,用LED数码管显示实验要求的状态结果,设计电路的硬件接线图和实现上述要求的程序。
关键词:51单片机步进电机ZLG7290 ULN2003二、设计内容与要求:1、任务介绍:实现步进电机按规定的速度正转、反转,转过指定的角度,要有点动功能。
所有命令通过键盘输入,步进电机在运行过程中要有状态和数据指示。
2、每套设计文档应包括:系统原理说明、程序框图、电路原理图和程序清单。
三、实验器件介绍及原理:本实验采用单片机来控制步进电机,实现了软件与硬件相结合的控制方法。
在单片机环境下,用ULN2003驱动芯片驱动步进电机,用ZLG7290芯片作用下的按键控制步进电机的运行,从而达到实验要求。
其控制框图(图一)为:图一:控制框图1、系统硬件介绍1.1步进电机1.1.1相关的技术指标:a、相数:指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机,本实验用的是四相步进电机。
电机相数不同,其步距角也不同。
b、步距角:表示控制系统每发一个步进脉冲信号,电机所转动的角度。
本实验程序运行前要先测量步进电机的步距角。
单片机控制步进电机正反转的实际应用程序
单片机控制步进电机正反转的实际应用程序/*这是一个控制步进电机正反转的实际应用程序*//*选用的是三相步进电机驱动器,p14口线用做步进电机的脉冲控制*//*p13口线用做步进电机的方向控制。
p15,p16,p17是光耦开关量输入*//*信号端,p20,p21,p22,p23与x25045看门狗存储器相连*//*k7,k8键是设定步进电机转动速度参数的加减键*//*k9是启动运行键,按一下k9,步进电机开始运行,直到p17口线有信号输入才停止*/ /*k10是停止键,任何时候按下k10都将停止步进电机当前的运行*//*k11是步进运行键,按一下,步进电机动一下*//*k12键是反向运行键,按一下,步进电机开始反向运行,知道p15口线有信号才停止*/ /*如果p16口线有信号输入,则只有k12键才起作用,其它键都没反应。
*/START:do;$INCLUDE(REG51.DCL)DECLARE (addrl,n,I,j,ok,ds) byte; /*定义变量*/declare l(5) byte;declare (dat,data) byte at (30h);declare delay word;DECLARE ACO(11) BYTE CONSTANT (05h,9fh,23h,0bh,99h,49h,/*定义LED段码表*/ 41h,1fh,01h,09h,00h);declare si literally 'p21',sck literally 'p20'; /*X25045囗线定义*/declare so literally 'p22',cs literally 'p23';dog:procedure; /* 初始化看门狗x25045 */cs=1;call time(1);cs=0;call time(1);cs=1;end dog;run:procedure; /*步进电机运行脉冲输出程序*/if ok=1 thencall dog;do;p14=0;call time(1);p14=1;call time(1);end;end run;DISPLAY:PROCEDURE(L0,L10); /*显示子程序*/DECLARE (L0,L10) BYTE; /*定义显示二位*/n=L10;n=aco(n); /*十位数BCD码译成段码*/sbuf=n; /*十位数送164显示*/do while ti=0; /*等待发送结束*/call dog; /*看门狗定时器复位*/end;n=L0;n=aco(n);sbuf=n; /*个位数送164显示*/do while ti=0;call dog;end;end display;outbyt: procedure(da); /*向看门狗存储器写入一字节*/ declare (i,da) byte;j=da; /*将要写入的字节赋给临时变量J */do i=0 to 7; /*左移8位,送到口线si */sck=0;j=scl(j,1);si=cy;sck=1; /*每移一位数据,跟一个时钟信号*/end;end outbyt;inbyt: procedure; /* 从看门狗存储器读出一字节*/ declare (i,di) byte;j=0;do i=0 to 7;sck=1;sck=0;cy=so;j=scl(j,1); /*从看门狗存储器读出一字节送入临时变量j*/ end;dat=j;end inbyt;wrenable: procedure; /* 置看门狗写使能*/sck=0;cs=0;; /* write enable command */call outbyt(06h); /* x25045 写使能指令06h */cs=1;sck=0;end wrenable;wrdisable: procedure; /* 置看门狗写禁止*/sck=0;cs=0;; /* write disable command */call outbyt(04h);sck=0;cs=1;end wrdisable;wrregister: procedure; /* 写状态寄存器*/sck=0;cs=0;dat=01h; /* write register command */call outbyt(dat);; /* 00h--1.4S, 20h--200MS, 10h--600MS, 30h--disable Wdog */ call outbyt(00h); /* 设定看门狗定时时间*/;sck=0;cs=1;call time(200); /* wait to complete writting cycle */end wrregister;rdregister:procedure; /* 读看门狗状态寄存器*/sck=0;cs=0;; /* register read command */call outbyt(05h);call inbyt; /* status register read in <DAT> */sck=0;cs=1;end rdregister;wbyte:procedure; /* 看门狗存储器字节写入子程序*/ declare comm byte;sck=0;cs=0;comm=02h; /* 写指令02h */call outbyt(comm);call outbyt(addrl);call outbyt(dat); /* send one byte data to X25043 */cs=1;sck=0;call time(150);end wbyte;rbyte:procedure; /*看门狗存储器字节读出子程序*/declare comm byte;sck=0;cs=0;comm=03h; /* read command */call outbyt(comm);call outbyt(addrl);call inbyt; /* read one byte to <DAT> */sck=0;cs=1;end rbyte;incdata: procedure; /* 参数修改--"加"键处理子程序+ */if p10=0 then /* 如果K7键按下*/do;do while p10=0; /* 等待键松开有效*/call dog; /* 此处必需调用看门狗复位子程序("喂狗"),否则程序将被看门狗复位*/ end;data=data+1; /* 设定值+1 */if data>99 then data=1; /* 规定设定值的上限*/L(1)=data MOD 10; /*将设定值的十位数拆出来送给十位数显示变量L(1) */L(2)=data/10; /*将设定值的个位数拆出来送给个位数显示变量L(2) */call display(L(1),L(2)); /* 将改变后的设定值送164显示出来*/call time(200); /* 延时*/call dog;call time(200);call dog;call wrenable; /* 置存储器写使能*/addrl=00h; /* 置存储器地址*/dat=l(1);call wbyte; /* 将变量L(1)的值写入存储器00h位置*/call wrenable;addrl=01h;dat=l(2);call wbyte; /* 将变量L(2)的值写入存储器01h位置*/end;end incdata;decdata: PROCEDURE; /* 参数修改---"减"键处理子程序- */IF p11=0 THEN /* k8 键处理子程序*/do;do while p11=0;call dog;end;DATA=DATA-1; /* 设定值-1 */if data=0 then data=99;L(1)=data MOD 10;L(2)=data/10;call display(l(1),l(2));call dog;call time(200);call dog;call time(200);call dog;call wrenable;addrl=00h;dat=l(1);call wbyte;call wrenable;addrl=01h;dat=l(2);call wbyte;end;END decdata;starton: PROCEDURE; /* start */declare sd byte;if p12=0 THEN /* K9键处理子程序*/do;do while p12=0;call dog;end;if p17=0 then ok=0; /* 如果p17 口线上有信号输入,则运行标志置0 (停止运行)*/ p13=1; /* 置步进电机正向运转*/call time(200);call dog;do while ok=1; /* 当运行标志为1时,执行速度延时操作*/do sd= 0 to data; /* 根据设定值data的数值延时来确定步进电机运行时的脉冲给定速度*/call dog;end;end;END starton;step: PROCEDURE; /* step */declare sd byte;p13=1; /* 置步进电机正向运转*/call time(200);IF p33=0 THEN /* k11键处理子程序*/do;if p17=0 then ok=0; /* 如果p17上有信号输入,则停止运行*/do while p33=0;do sd= 0 to data; /* 调用延时,调整步进电机的运行速度*/call dog;call time(2);end;call run;call dog;end;end;ok=0;END step;back: PROCEDURE; /* 反向运行处理子程序*/declare sd byte;IF p34=0 THENdo;do while p34=0;call dog;end;if p15=0 then ok=0; /* 反向运行时,如果遇到p15上有信号输入,则停止步进电机运行*/ p13=0; /* 置步进电机反向运行*/call time(200);call dog;do while ok=1;do sd=0 to data; /*根据设定值调节步进电机的运行速度*/call dog;call time(2);end;call run;if (p15=0 or p32=0 ) then ok=0; /* p15 或p32 口线任意一个有信号输入,停止运行*/ end;end;END back;MAIN$PROGRAM: /* 初始化主程序*/ea=0; /* 关中断*/SCON=00h; /*置串口方式0 ,串行数据输出模式*/PCON=00h;tmod=11h;enable; /* 开中断(ea=1) */SCK=0;cs=1; /* 定义存储器口线初始状态*/call wrenable;call wrregister; /* 看门狗存储器初始化*/call wrenable;call dog;p2=0ffh; /* 初始化各个口线的状态*/p1=0ffh;ok=0;p14=1;p32=1;p33=1;p34=1;p13=1;ADDRL=00h; /* 上电复位后从存储器中读出设定的速度值*/CALL rbyte;l(1)=dat;addrl=01h;call rbyte;l(2)=dat;DATA=L(1)+L(2)*10; /*将读出的值合并成十进制,存入变量data中*/ /* 以下是主循环程序*/LOOP:IF p10=0 THEN CALL incdata; /* 检测各个按键是否有按下*/IF p11=0 THEN CALL decdata;if p12=0 thendo;ok=1;call starton;end;if p34=0 thendo;ok=1;call back;end;if p33=0 thendo;ok=1;call step;end;call dog;CALL DISPLAY(L(1),L(2)); /* 将设定值送164显示*/call dog;CALL TIME(100);call dog;GOTO LOOP;END START;。
51单片机控制的步进电机C语言程序

51单片机控制的步进电机C语言程序用的是L298驱动的和ULN2003一样,你把它换成2003就行拉#include <AT89X51.H>unsigned char codetable[]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9,0x00,0xf1,0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0x f3,0x00};unsigned char temp,temp_old;unsigned char key;unsigned char i,j,k,m,s;void delay(int i){for(m=i;m>0;m--)for(j=250;j>0;j--)for(k=10;k>0;k--);}void saomiao(){P3=0xff;P3_4=0;temp=P3;temp=temp&0x0f;if(temp!=0x0f){for(i=50;i>0;i--)for(j=200;j>0;j--);temp=P3;temp=temp&0x0f;if(temp!=0x0f){temp=P3;temp=temp&0x0f;switch(temp){case 0x0e:key=1;break;case 0x0d:key=2;break;case 0x0b:key=3;break;case 0x07:key=4;break;}temp=P3;temp=temp&0x0f;while(temp!=0x0f){temp=P3;temp=temp&0x0f;}}}P3=0xff;P3_5=0;temp=P3;temp=temp&0x0f;if(temp!=0x0f){for(i=50;i>0;i--)for(j=200;j>0;j--);temp=P3;temp=temp&0x0f;if(temp!=0x0f){temp=P3;temp=temp&0x0f;switch(temp){case 0x0d:key=5;break;case 0x0b:key=6;break;case 0x07:key=7;break;}temp=P3;temp=temp&0x0f;while(temp!=0x0f){temp=P3;temp=temp&0x0f;}}}}void main(void){while(1){saomiao();if(key==1){ P1=0;P2=0;saomiao();}if(key==2){temp_old=key;for(s=0;s<8;s++){ P2=table[s];P1_4=0;delay(13);saomiao();if(key!=temp_old){P1_4=1;break;}}}if(key==3){temp_old=key;for(s=0;s<8;s++){ P2=table[s];P1_5=0;delay(5);saomiao();if(key!=temp_old){P1_5=1;break;}}}if(key==4){temp_old=key; for(s=0;s<8;s++){ P2=table[s];P1_6=0;delay(20);saomiao();if(key!=temp_old){P1_6=1;break;}}}if(key==5){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_7=0;delay(13);saomiao();if(key!=temp_old){P1_7=1;break;}}}if(key==6){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_5=0;delay(5);saomiao();if(key!=temp_old){P1_5=1;break;}}}if(key==7){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_6=0;delay(20);saomiao();if(key!=temp_old){P1_6=1;break;}}}}}C语言程序源代码#include <REGX51.H> // 51寄存器定义#include "intrins.h"#define control P1 //P1_0:A相,P1_1:B相,P1_2:C相,P1_3:D相#define discode P0 //显示代码控制端口#define uchar unsigned char //定义无符号型变量#define uint unsigned intsbit en_dm=P3^0; //显示代码锁存控制sbit en_wk=P3^1; //位控锁存控制uchar code corotation[4]= {0x03,0x06,0x0c,0x09};//电机正转uchar code rollback[4]={0x0c,0x06,0x03,0x09}; //电机反转uchar code tab[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//显示字段uint code Levspeed[5]={500,400,300,200,100};//电机速度等级uchar Hscan,speedcount;//Hscan行扫描,speedcount 速度等级计数uint uu; //频率计数uint step,setstep; //step:电机步伐计数,setstep:手动设置电机步伐uint speed=500; //电机初始速度uchar count;uchar flag[5];uchar butcount; //按键次数//****************************************//flag[0] 正转标志//flag[1] 反转标志//flag[2] 加速标志//flag[3] 减速标志//flag[4] 设置标志//****************************************Delay1mS(unsigned int tt) //延时1ms “Delay1mS”延时子程序,用循环语句延时。
51单片机控制步进电机
设计方案与原理1 设计方案设计一个51单片机四相步进电机控制系统要求系统具有如下功能:(1)由I/O口产生的时序方波作为电机控制信号;(2)信号经过驱动芯片驱动电机的运转;(3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。
2 设计原理步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。
步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。
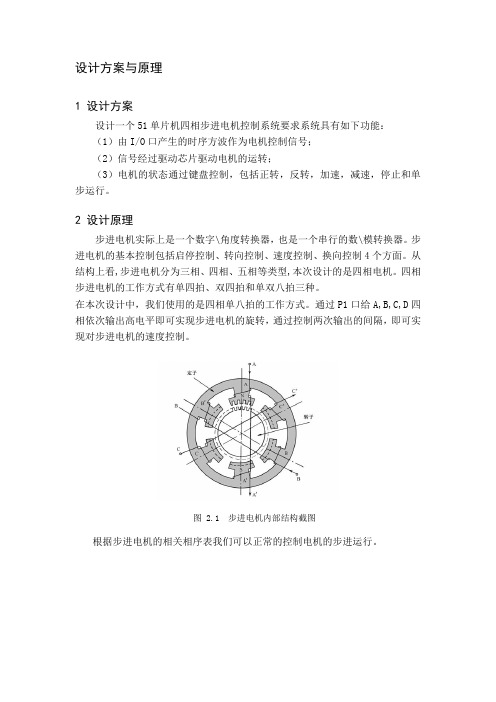
从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。
四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。
在本次设计中,我们使用的是四相单八拍的工作方式。
通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。
图 2.1 步进电机内部结构截图根据步进电机的相关相序表我们可以正常的控制电机的步进运行。
3 硬件设计根据设计要求和设计原理,我们可以绘制出基本的功能方框图,以便之后我们连接实际电路时的方便和可靠。
用键盘控制具体的功能模块,这样更能直观方便的控制整体的系统,使其达到我们预期的操作效果。
图3.1中简单描述了整个单片机系统的控制模式和控制流程,包括通过时钟电路和键盘电路,来控制ULN2003驱动电机动作。
图表图 3.1 硬件电路功能方框图4 电路原理图4.C程序代码#include <reg52.h>#define KeyPort P3#define DataPort P0 //定义数据端口程序中遇到DataPort 则用P0 替换sbit LATCH1=P2^2;//定义锁存使能端口段锁存sbit LATCH2=P2^3;// 位锁存unsigned char code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9unsigned char code dofly_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码unsigned char TempData[8]; //存储显示值的全局变量sbit A1=P1^0; //定义步进电机连接端口sbit B1=P1^1;sbit C1=P1^2;sbit D1=P1^3;#define Coil_AB1 {A1=1;B1=1;C1=0;D1=0;}//AB相通电,其他相断电#define Coil_BC1 {A1=0;B1=1;C1=1;D1=0;}//BC相通电,其他相断电#define Coil_CD1 {A1=0;B1=0;C1=1;D1=1;}//CD相通电,其他相断电#define Coil_DA1 {A1=1;B1=0;C1=0;D1=1;}//DA相通电,其他相断电#define Coil_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电#define Coil_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电#define Coil_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电#define Coil_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电#define Coil_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电unsigned char Speed=1;bit StopFlag;void Display(unsigned char FirstBit,unsigned char Num);void Init_Timer0(void);unsigned char KeyScan(void);/*------------------------------------------------uS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下 T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t)while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}/*------------------------------------------------主函数------------------------------------------------*/ main(){unsigned int i=512;//旋转一周时间unsigned int n=0;unsigned char num,vo,v;Init_Timer0();Coil_OFF;while(1) //正向{num=KeyScan(); //循环调用按键扫描if(num==1)//第一个按键,速度等级增加{if(Speed<15)Speed=Speed+2;}if(num==2)//第二个按键,速度等级减小{if(Speed>1)Speed=Speed-2;}if(num==3)//第三个按键,电机停转{Coil_OFFStopFlag=1;}if(num==4)//第四个按键,电机启动{StopFlag=0;TR0=1;}if(num==5)//第五个按键,电机反转{TR0=0;TR1=1;}if(num==6)//第六个按键,电机正传{TR0=1;TR1=0;}vo=(0.25*(20-Speed)*64*32)/1000;v=60/vo;TempData[0]=dofly_DuanMa[v/10]; //分解显示信息,如要显示68,则68/10=6 68%10=8TempData[1]=dofly_DuanMa[v%10];}}/*------------------------------------------------显示函数,用于动态扫描数码管输入参数 FirstBit 表示需要显示的第一位,如赋值2表示从第三个数码管开始显示如输入0表示从第一个显示。
C51单片机实现128细分步进电机驱动程序

Quardrant0, 229, 112,
Quardrant0, 228, 115,
#define PWM2disable(); CCAPM2&=0xBD; //停止P1.5引脚输出PWM
#define PWM3disable(); CCAPM3&=0xBD; //停止P1.6引脚输出PWM
#define PWM4disable(); CCAPM4&=0xBD; //停止P1.7引脚输出PWM
#define MotorPowerOff 0x03 //电机掉电
//定义细分表结构
typedef struct tagSubdivideTable{
unsigned char mQuardrant; //象限0-3
#define PWM4enable(); CCAPM4|=0x42; //配置P1.7引脚为PWM输出
#define PWM0disable(); CCAPM0&=0xBD; //停止P1.3引脚输出PWM
#define PWM1disable(); CCAPM1&=0xBD; //停止P1.4引脚输出PWM
#define CCAP3G 0XFD
#define CCAP4G 0XFE
#define CCAP5G 0XFF
#define CCAP0L 0XEA
#define CCAP1L 0XEB
#define CCAO2L 0XEC
#define CCAP3L 0XED
}WorkInformation;
sbit PhaseA = 0X90^4
sbit PhaseB = 0X90^5
基于51单片机的步进电机控制系统设计与实现
基于51单片机的步进电机控制系统设计与实现步进电机控制系统是基于51单片机的一种控制系统,它主要用来控制步进电机的转动方向和转速等参数。
下面详细解释一下这个系统的设计和实现。
1. 系统硬件设计步进电机控制系统的硬件主要包括51单片机、驱动电路、步进电机和电源等部分。
其中,驱动电路是控制步进电机的关键,它通常采用L298N芯片或ULN2003芯片等常用的驱动模块。
在硬件设计方面,主要需要考虑以下几个方面:(1)步进电机的种类和规格,以便选择合适的驱动电路和电源。
(2)驱动电路的接线和参数设置,例如步进电机的相序、脉冲频率和电流大小等。
(3)电源的选取和参数设置,以满足系统的供电要求和安全性要求。
2. 系统软件设计步进电机控制系统的软件设计主要包括编写控制程序和调试程序。
其中,控制程序是用来实现步进电机的正转、反转、加速和减速等控制功能,而调试程序则用来检测系统的电路和程序的正确性和稳定性。
在软件设计方面,主要需要考虑以下几个方面:(1)确定控制程序的算法和流程,例如使用“循环控制法”或“PID控制法”等控制方法。
(2)选择编程语言和编译器,例如使用汇编语言或C语言等。
(3)编写具体的控制程序和调试程序,并进行测试和调试,以确保程序的正确性和稳定性。
3.系统实现步进电机控制系统的实现主要包括硬件组装和软件烧录两个部分。
在硬件组装方面,需要按照硬件设计图纸进行零部件的选取和电路的组装,同时进行电源和信号线的接入。
在软件烧录方面,需要使用专用的编程器将程序烧录到51单片机的芯片中,并进行相应的设置和校验。
总之,基于51单片机的步进电机控制系统是一个功能强大、应用广泛的控制系统,可以实现精密控制和自动化控制等多种应用,具有很高的实用价值和研究价值。
51单片机控制步进电机硬件图及C语言编程
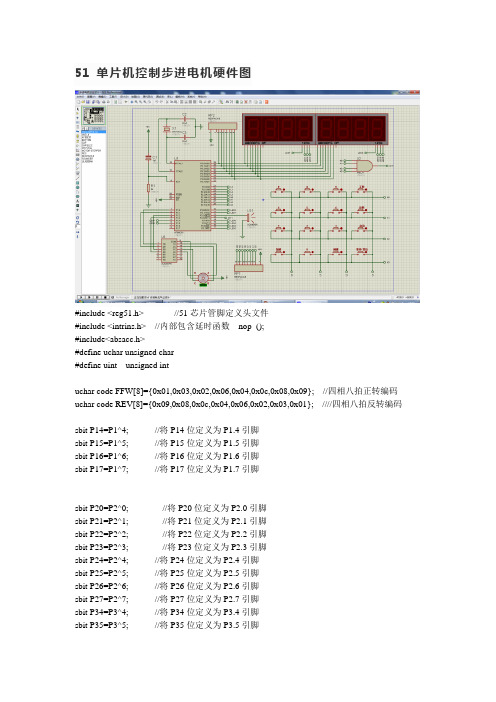
51单片机控制步进电机硬件图#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数_nop_();#include<absacc.h>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍正转编码uchar code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; ////四相八拍反转编码sbit P14=P1^4; //将P14位定义为P1.4引脚sbit P15=P1^5; //将P15位定义为P1.5引脚sbit P16=P1^6; //将P16位定义为P1.6引脚sbit P17=P1^7; //将P17位定义为P1.7引脚sbit P20=P2^0; //将P20位定义为P2.0引脚sbit P21=P2^1; //将P21位定义为P2.1引脚sbit P22=P2^2; //将P22位定义为P2.2引脚sbit P23=P2^3; //将P23位定义为P2.3引脚sbit P24=P2^4; //将P24位定义为P2.4引脚sbit P25=P2^5; //将P25位定义为P2.5引脚sbit P26=P2^6; //将P26位定义为P2.6引脚sbit P27=P2^7; //将P27位定义为P2.7引脚sbit P34=P3^4; //将P34位定义为P3.4引脚sbit P35=P3^5; //将P35位定义为P3.5引脚sbit P36=P3^6; //将P36位定义为P3.6引脚sbit P37=P3^7; //将P37位定义为P3.7引脚sbit P30=P3^0; //将P30位定义为P3.0引脚sbit P31=P3^1; //将P31位定义为P3.1引脚sbit BEEP=P3^2; // 蜂鸣器bit on=0;bit off=1; //运行与停止标志bit zdirection=0; //方向标志bit fdirection=0; //方向标志uchar h,l,k; //定义行键值//定义列键值uchar idata count[3]; //0-9数值储存unsigned char code Tab[ ]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //数字0~9的段码uchar keyval=0; //定义变量储存按键值uchar dat=0; //按键值uint run_i=0;uchar count_i=0;uint run=0; //需要运行的步数uint drun=0; //当前运行的步数bit flag;uint x=60;uint y=60;uint z=0;/* uint k=0; //调速按键次*//**************************************************************/ void led_delay1(void){unsigned char j;for(j=0;j<52;j++);}void beep(){uchar j;for (j=0;j<200;j++){led_delay1();BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/**************************************************************函数功能:数码管动态扫描延时**************************************************************/void led_delay(void){unsigned char j;for(j=0;j<200;j++);}/**************************************************************/**************************************************************函数功能:软件延时去抖动子程序**************************************************************/void delay20ms(void){unsigned char i,j;for(i=0;i<70;i++)for(j=0;j<60;j++);}void display(uint run){ //显示设点步数P31=1; //点亮数码管DS6P30=0;P34=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((run/100)!=0){ P0=Tab[run/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P30=1;P31=0;P34=0;P36=0;P37=0;P14=0;P15=0;if(((run%100/10)==0)&&(run/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();} //点亮数码管DS5else{ P0=Tab[run%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P37=1; //点亮数码管DS4P30=0;P34=0;P35=0;P36=0;P31=0;P14=0;P15=0;if((run/10==0)&&(run%100/10==0)&&(run%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[run%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}/*********************************************************************/void ddisplay(uint drun){ //显示运行步数P36=1; //点亮数码管DS3P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if((drun/100)!=0){P0=Tab[drun/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P35=1; //点亮数码管DS2P30=0;P34=0;P31=0;P36=0;P37=0;P14=0;P15=0;if(((drun%100/10)==0)&&(drun/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();}//点亮数码管DS5else{ P0=Tab[drun%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P34=1; //点亮数码管DS1P30=0;P31=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((drun/10==0)&&(drun%100/10==0)&&(drun%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[drun%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}void dddisplay(){ P15=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P14=0;if((fdirection==1)&&(on==1)){P0=0xbf; led_delay(); led_delay(); }P0=0xff;P14=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if(y==60){P0=0x08;led_delay(); led_delay();}if(y==50){P0=0x03; led_delay(); led_delay(); }if(y==40){P0=0x46; led_delay(); led_delay();}if(y==30){P0=0x21 ;led_delay(); led_delay();}if(y==20){P0=0x86; led_delay(); led_delay(); }if(y==10){P0=0x8e; led_delay(); led_delay();}P0=0xff;}/************************************************************** 函数功能:主函数**************************************************************/ void main(void){ x=60;P14=0;P15=0;P16=0;P17=0;EA=1;EX1=1; //允许使用外中断IT1=1; //选择负跳变来触发外中断PT0=1;ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式1TH0=0xec; //定时器T0的高8位赋初值TL0=0x78; //定时器T0的低8位赋初值TR0=1;P30=1; //启动定时器T0P34=1;P35=1;P36=1;P37=1;P31=1;P2=0xf0;while(1){if(flag){P2=0x0f; h=P2&0x0f; //所有行线置为高电平"1",所有列线置为低电平"0",并把值给hif((P2&0x0f)!=0x0f) //行线中有一位为低电平"0",说明有键按下delay20ms(); //延时一段时间、软件消抖else {keyval=16;}if(h!=0x0f) //确实有键按下{h=P2&0x0f; //读取行值P2=0xf0; //反转电位l=P2&0xf0; //读取列值k=h+l; //行列相加,为键位值if(k==0x7e) keyval=12;if(k==0x7d) keyval=0;if(k==0x7b) keyval=13;if(k==0x77) keyval=15;if(k==0xbe) keyval=1;if(k==0xbd) keyval=2;if(k==0xbb) keyval=3;if(k==0xb7) keyval=14; //键位与设定对应if(k==0xde) keyval=4;if(k==0xdd) keyval=5;if(k==0xdb) keyval=6;if(k==0xd7) keyval=11;if(k==0xee) keyval=7;if(k==0xed) keyval=8;if(k==0xeb) keyval=9;if(k==0xe7) keyval=10;}else keyval=16;dat=keyval;if((dat==10)&&(run!=0)) //正转键按下{zdirection=1; //方向标志fdirection=0;on=1; //运行与停止标志off=0;}if((dat==11)&&(run!=0)) //反转键按下{fdirection=1; //方向标志zdirection=0;on=1; //运行与停止标志off=0;}if(dat==12) //加速键{if(y==10) y=10;else y=y-10;}if(dat==13) //减速键{if(y==60) y=y;else y=y+10;}if((dat==14)&&(run!=0)) //开始键按下{ if(z==1) {on=1;}elseon=1;off=0;z=0;if((zdirection==0)&&(fdirection==0)){zdirection=1;}}if(dat==15) { z++;on=0; } //停止键按下一次if((on==0)&&(z==2)) //停止键按下二次{count[0]=0; //显示清零count[1]=0;count[2]=0;drun=0; run=0;z=0;on=0;off=1; //运行与停止标志}if((dat>=0)&&(dat<=9)&&(on==0)&&(off==1)){count[count_i]=dat;if(count[0]!=0){count_i++;}if((count_i==3)&&(on==0)&(off==1)){count_i=0;}if((count_i==0)&&(on==0)&(off==1)){ if(count[0]==0)run=0;else run=count[0]*100+count[1]*10+count[2];}if((count_i==1)&&(on==0)&(off==1)){run=count[0];}if((count_i==2)&&(on==0)&(off==1)){run=count[0]*10+count[1];}}if((dat==0)&&(on==1)){off=1;}if(dat==16);flag=0;}/*if(run!=0){*/ddisplay(drun);dddisplay();display(run);/*} */ //调用按键值的数码管显示子程序if((run==drun)&&run!=0){on=0;off=1;beep();drun=0; run=0;count[0]=0; //显示清零count[1]=0;count[2]=0;count_i=0;}}}/**************************************************************外部中断键盘扫描键值保存在dat中******************************************************************************* ************/void Interrupt1() interrupt 2 using 3{flag=1;}/*************************************************************************/ void Interrupt2() interrupt 1 using 1{ TR0=0;EX1=1;TH0=0xec;TL0=0x78;x--;if(x==0){if((zdirection==1)&&(fdirection==0)&&(on==1)&&(off==0)){P1=FFW[run_i];fdirection=0;led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((zdirection==0)&&(fdirection==1)&&(on==1)&&(off==0)){P1=REV[run_i];led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时zdirection=0;drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((on==0)&&(off=1))P1=0x00; x=y;}TR0=1;}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机控制程序(c语言+51单片机)
发布:2011-05-31 | 作者: | 来源: guozhangfu | 查看:720次 | 用户关注:
摘要:实现了一种全集成可变带宽中频宽带低通滤波器,讨论分析了跨导放大器-电容(OTA—C)连续时间型滤波器的结构、设计和具体实现,使用外部可编程电路对所设计滤波器带宽进行控制,并利用ADS软件进行电路设计和仿真验证。
仿真结果表明,该滤波器带宽的可调范围为1~26 MHz,阻带抑制率大于35 dB,带内波纹小于0.5 dB,采用1.8 V电源,TSMC 0.18μm CMOS工艺库仿真,功耗小于21 mW,频响曲线接近理想状态。
关键词:Butte
#include<reg51.h>
#define uint unsigned int
#define uchar unsigned char
#define ms *77
// f = 12 M
#define LEDLen 4
#define Dj_star() {IE=0x81; pri_dj=0; }
#define Dj_stop() {IE=0x00; pri_dj=1; P1=0xff; shache="0"; delay(800ms); delay(800ms);delay(400ms); shache = 1; }
#define Chilun_Num 8
/* 齿轮数 8 个*/
#define set_display_num() { LEDBuf[0] = tmp / 1000; LEDBuf[1] = tmp / 100 % 10;
LEDBuf[2] = tmp / 10 % 10; LEDBuf[3] = tmp % 10; }
uchar LEDBuf[LEDLen] = {0,0,0,0};
void read_num (); /* 读播码盘到 set_round_num * 8 */ void display ();
void delay(uint delay_time) { uint i; for (i=0; i < delay_time ;
i++) ; }
void run ();
void fx_run();
uint round_num = 0; /* 记录已转的齿轮数 , 中断1次加1*/
uint set_round_num = 0; /* 播码盘设置圈数 */
uint set_pwm_width = 0; /* 播码盘设置步进电机正向速度 */ bit one_round_flg = 0;
sbit led_1000 = P0^7; //use for display
sbit led_100 = P0^6; //use for display
sbit led_10 = P0^5; //use for display
sbit led_1 = P0^4; //use for display
sbit key_start = P3^0;
sbit key_puse = P3^0;
sbit key_clear = P3^1;
/* P3^2 接齿轮传感器中断 */
sbit bujin_zx_stop = P3^3; /* 接步进电机 ,正向到位传感器 ,为 0 停机 */
sbit bujin_fx_stop = P3^4; /* 接步进电机 ,反向到位传感器 ,为 0 停机 */
sbit shache = P3^5; /* 接刹车控制继电器 0 电位有效
*/
sbit pri_dj = P3^6; /* 接主电机控制继电器 0 电位有效
*/
void main(){
TCON = 0x01;
display();
while(1) {
IE="0x00";
round_num = 0;
display();
if ( bujin_fx_stop ) fx_run();
while ( key_start );
delay ( 8ms );
if(!key_start){
read_num();
//set_round_num = 8;
while ( !key_start );
run ();
fx_run();
}
}
}
void run () {
#define Delay_time 180
/* 转一圈 50 次循环,每循环 4 步,50 * 4 = 200 , 200 * 1。
8 = 360 */
uchar i ;
P1 = 0xff;
set_pwm_width = 15 + set_pwm_width / 10;
while ( 1 ) {
while( !shache | !key_start );
Dj_star();
for ( i="0" ; bujin_zx_stop & !pri_dj;i++ ){
P1 = 0xf9;
delay ( Delay_time ); // bujin_zx_stop = P3^3; P1 = 0xfc; // bujin_fx_stop = P3^4; delay ( Delay_time); // key_puse = P3^0; P1 = 0xf6; // key_clear = P3^1; delay ( Delay_time ); // shache = P3^5; P1 = 0xf3; // pri_dj = P3^6; delay ( Delay_time );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one_round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; } }
P1 = 0xff;
if ( pri_dj ) break;
if ( !key_puse ) {
delay ( 8ms );
if ( !key_puse ) {
Dj_stop();
while ( !key_puse );
// next pree key
while( !shache );
while(1){
while ( key_puse & key_clear );
delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); } if ( !key_puse ) break;
}
while( !key_puse );
delay(8ms);
while( !key_puse );
}
}
}
}。