小波的几个术语及常见的小波基介绍
小波分类_精品文档

3
() 2 c2e2 / 2
该小波是由一高斯函数的二阶导数所得到的,其波形
和其频谱如图所示。
2023/10/12
11
2.常用的基本小波
Mexican hat wavelet: Psi 1
The FT of Psi 20
18 0.8
16
0.6
14
12 0.4
10 0.2
0.2
10
0
8
-0.2
6
-0.4 4
-0.6
-0.8
2
-1
0
-4 -2
0
2
4
0
0.5
1
Morlet小波, (a)时域波形, (b)频谱
2023/10/12
10
2.常用的基本小波
Mexican hat小波
该小波的中文名字为“墨西哥草帽”小波,又称
Marr小波。它定义为:
(t) c(1 t2 )et2 / 2
的支撑范围在
, 的支撑范围在
。小波
(t) 具有N阶消失矩t ,0 ~在(2N 1) (t)
处具(有1NN阶) ~零N点。但db(t小) 波是非对称的,(其)相应的 0滤
波器组属共轭正交镜像滤波器组(CQMFB)。
2023/10/12
18
3.正交小波
1
1
0
-1 01
0 -1 230
db 2
1
0
-1
(t), (2 j t) 0 • Haar波是对称的。系统的单位冲击响应若具有对称性,
则该系统具有线性相位,这对于去除相位失真是非常有 利的。Haar小波是目前唯一一个既具有对称性又是有限 支撑的正交小波;
小波分析入门

小波分析的基本知识屠2001.8.2A.基本知识A1.小波(WAVELET)分类1.原始小波:(1).高斯gaus, (2).莫来特morlet, (3).墨西哥帽mexihat2.无限正则小波浪:(4).梅耶meyr (5).离散梅耶dmey3.正交和紧支集小波:(6).达比切斯dbN(Daubechies), (7).对称symN(symlets), (8).coifN4.双正交和紧支集小波: (9).双正交biorNr (10). 逆双正交rbioNr.Nd5.复小波: (11).复高斯cgauN (12)复莫来特 cmor Fb-Fc (13)复香农shan Fb-Fc(14).复频率B样条 fbspM Fb-Fc注1:db1小波也称哈尔Harr小波,也是原始小波注2.symlet小波是Daubechies小波的改进,由不对称改成近似对称注3.紧支集即函数在有限区域内不为零A2.小波函数和尺度(SCALE)函数1.小波函数(psi)--由高通滤波器确定,产生小波分解的细节 D(detail,)2.尺度函数(phi)--由低通正交镜象滤波器确定, 产生小波分解的逼近 A(approximation)A3.小波分解:S(SIGNAL)=A1+D1=(A2+D2)+D1=(A3+D3)+D2+D1=(A4+D4)+D3+D2+D1=...A4.小波包(WP=Wavelet Packet)分解:S=A1+D1=(AA2+DA2)+(AD2+DD2)=(AAA3+DAA3)+(ADA3+DDA3)+(ADA3+DDA3)+...A5.WAVEMENU: 开始图象用户界面GUI工具A6.WAVEDEMO: 小波工具箱演示B小波变换B1.一维连续小波变换:CWT coefs=cwt(S,scales,"wname')coefs=cwt(S,scales,'wname','plot')coefs=cwt(S,scales,'wname','plotmode')scales--正实数,如1:32,[64 32 16:-2:2],...COLORMENU,COLORBARB2.单级一维离散小波变换:DWT,UPCOEF[Ca1,Cd1]=dwt(x,'wname'), Ca1--逼近系数 Cd1--细节系数[Ca1,Cd1]=dwt(x,Lo_D,Hi_D)a1=upcoef('a',Ca1,'wname',1,L); a1--逼近 L--length(x)d1=upcoef('d',Cd1,'wname',1,L); d1--细节 L--length(x)B3.单级一维逆离散小波变换:IDWT, x=idwt(Ca1,Cd1,'wname')B4.多级一维离散小波分解:WAVEDEC,APPCOEF,DETCOEF,WRCOEF[C,L]=wavedec(x,N,'wname'),N--级(LEVEL)数 C--分解(DECOMPOSITION)矢量L--辅助操作(Bookkeeping)矢量B5.APPCOEF:提取一维小波逼近系数,A=appcoef(C,L,'wname',N)B6.DETCOEF:提取一维小波细节系数,A=detcoef(C,L,'wname',N)B7.WRCOEF:X=wrcoef('type',C,L,'wname',N).type=a,逼近;type=d,细节B8.WAVEREC(多级一维离散小波重构) 重构--RECONSTRUCTIONx=waverec(C,L,'wname')x=waverec(C,L,Lo_R,Hi_R)B9.WFILTERS--小波滤波器[Lo_D,Hi_D,Lo_R,Hi_R]=wfilters('wname'),'wname'=db,coif,sym,bior,rbioB10.DYADDOWN:二进(Dyadic)降采样 Y=dyaddown(x,EVENODD)EVENODD--even,y(k)=x(2k), --odd,y(k)=x(2k-1)B11. DYADUP:二进增采样(填零), y=dyadup(x,EVENODD)B12. WKEEP:保留矢量或矩阵的一部分C.小波包变换C1. WPDEC一维离散小波包分解:[T,D]=wpdec(x,N,'wname',E,P), T--树结构Tree structure, D--数据结构E-熵 Entropy E='shannon','threshold','norm','log energy','user'P-附加参数'threshold' 'sure':P=threshold(0<=P)'norm':P=power,1<=P<2)C2. WPREC一维离散小波包重构x=wprec(T,D) T--小波包树(TREE) N—节点(NODE)C3. WPCOEF小波包系数x=wpcoef(S,D,N)D.MALLAT算法(FWT)E.一维试验信号(b1(t): b2(t): )oislop(ramp+color noise):1=<t<=499,(t/500)+b2(t);500=<t<=1000,1+b2(t)2.freqbrk:1=<t<=500,sin(0.03t);501=<t<=1000,sin(0.3t)3. heavysin4.nelec(2000 电力消耗)5.leleccum(4320分(72小时)电力消耗6.linchirp(线性快扫)7.mfreqbrk8.mishmash 9.nearbrk(1~499,511~1500)10.noisbloc 11.noisbump12.noischir 13.noisdopp 噪声多普勒14.noismima 15.noispol: 在[1 1000]间 t^2-t+1+b1(t) 16.noissin:sin(0.03t)+b1(t) 17.qdchirp18.quachip19.scddvbrk:二阶导数不连续,t<0,exp(-4t^2);t>=0,exp(-t^2),t=[-0.5 0.5]20.sinfract 21.sinper8 22.sumlichr23.sumsin:sin(3t)+sin(0.3t)+sin(0.03t)24.trsin:1=<t<=500,((t-1)/500)+sin(0.3t);501=<t<=1000,((1000-t)/500)+sin(0.3t)25.vonkoch:分形,科克雪花26.warma:AR(3),b2(t)=-1.5*b2(t-1)-0.75*b2(t-2)-0.125*b2(t-3)+b1(t)+0.527.wcantor:分形,康托(三分取一)曲线28.whitnois:在[-0.5 0.5]间的均匀白噪声29.wnoislop:1=<t<=499,(3t/500)+b1(t);500=<t<=1000,3+b1(t)30.wntrsin:1=<t<=500,((t-1)/500)+sin(0.3t)+b1(t);501=<t<=1000,((1000-t)/500)+sin(0.3t)+b1(t)31.wstep:1=<t<=500,s=0;501=<t<=1000,s=20.32.cuspamax(1024):x=linspace(0,1.1024);y=exp(-128*((X-0.3).^2))-3*(abs(x-0.7).^0.433.brkintri:顶端折线三角34.wcantsym(2188):对称康托集disp('******)*************MALLAT算法示例***********************************************')x=[1.8 1.0 -1.0 -1.8];[Lo_D,Hi_D]=wfilters('db1','d');tmpo1=conv(x,Lo_D); [1.8 1.0 -1.0 -1.8]*[0.7071 0.7071]tmpo2=conv(x,Hi_D);Ca1=dyaddown(tmpo1);Cd1=dyaddown(tmpo2);disp('低通分解滤波器系数Lo_D 高通分解滤波器系数Hi_D');disp( [(Lo_D)' (Hi_D)'] ),disp('卷积conv(x,Lo_D 卷积conv(x,Hi_D)');disp( [(tmpo1)’ (tmpo2)’] ),disp('一级逼近系数Ca1 一级细节系数Cd1');disp( [(Ca1)’ (Cd1)’] ),% Ca1=1.9799 -1.9799 Cd1= 0.5657 0.5657[Lo_R,Hi_R]=wfilters('db1','r');disp('低通重构滤波器系数Lo_R=');disp(Lo_R),disp('高通重构滤波器系数Hi_R=');disp(Hi_R),tmp1=dyadup(Cd1);tmpo3=conv(tmp1,Hi_R);d1=wkeep(tmpo3,4);tmp2=dyadup(Ca1);tmpo4=conv(tmp2,Lo_R);a1=wkeep(tmpo4,4);disp( '一级逼近a1 一级细节d1 ');DISP( [(a1)’ (d1)’] ),% 一级逼近a1= 1.4000 1.4000 -1.4000 -1.4000% 一级细节d1= 0.4000 -0.4000 0.4000 -0.4000figure(1),a0=a1+d1;subplot(521),bar(x,0.1),title('原始波形x=[1.8 1.0 -1.0 -1.8]'), grid,axis([0 5 -2 2]),subplot(522),bar(a0,0.1),title('分解后重构波形s=a1+d1'),grid,axis([0 5 -2 2])subplot(523),bar(Ca1,0.1),title(' 逼近系数Ca1=[1.98 -1.98]'),grid,axis([0 5 -2 2])subplot(524),bar(Cd1,0.1),title(' 细节系数Cd1=[0.566 0.566]'),grid,axis([0 5 0 1])subplot(525),bar(a1,0.1),title(' 一级逼近a1=[1.4 1.4 -1.4 -1.4]'),grid,axis([0 5 -2 2])subplot(526),bar(d1,0.1),title(' 一级细节d1=[0.4 -0.4 0.4 -0.4]'),grid,axis([0 5 -1 1])subplot(527),bar(Lo_D,0.1),title('低通分解滤波器系数Lo_D'),grid,axis([0 5 0 1])subplot(528),bar(Hi_D,0.1),title('高通分解滤波器系数Hi_D'),grid,axis([0 5 -1 1])subplot(5,2,9),bar(Lo_R,0.1), title('低通重构滤波器系数Lo_R'),grid,axis([0 5 0 1])subplot(5,2,10),bar(Hi_R,0.1),title('高通重构滤波器系数Hi_R'),grid,axis([0 5 -1 1])%******以上为MALLAT算法原理,实际上用简单命令DWT,UPCOEF计算如下************************** x=[1.8 1.0 -1.0 -1.8];length(x);[Ca1,Cd1]=dwt(x,'db1');a1=upcoef('a',Ca1,'db1',1,4);d1=upcoef('d',Cd1,'db1',1,4);x1=a1+d1;a0=idwt(Ca1,Cd1,'db1',4);------------------------------------------------------------------------------------ x=[1.8 -1.8 1.8 -1.8];x=[1.8 1.0 -1.0 -1.8];[Lo_D,Hi_D]=wfilters('db40','d');tmpo1=conv(x,Lo_D);tmpo2=conv(x,Hi_D);Ca1=dyaddown(tmpo1);Cd1=dyaddown(tmpo2);disp('低通分解滤波器系数Lo_D 高通分解滤波器系数Hi_D');disp( [(Lo_D)'(Hi_D)'] )disp('卷积conv(x,Lo_D)');disp(tmpo1),disp('卷积conv(x,Hi_D)');disp(tmpo2),disp('一级逼近系数Ca1=');disp(Ca1),disp('一级细节系数Cd1=');disp(Cd1),[Lo_R,Hi_R]=wfilters('db40','r');disp('低通重构滤波器系数Lo_R=');disp(Lo_R),disp('高通重构滤波器系数Hi_R=');disp(Hi_R),tmp1=dyadup(Cd1);tmpo3=conv(tmp1,Hi_R);d1=wkeep(tmpo3,4);tmp2=dyadup(Ca1);tmpo4=conv(tmp2,Lo_R);a1=wkeep(tmpo4,4);disp('一级逼近a1');disp(a1),disp('一级细节d1');disp(d1),figure(2),a0=a1+d1;subplot(521),bar(x,0.1),title('原始波形x=[1.8 1.0 -1.0 -1.8]'),subplot(521),bar(x,0.1),title('原始波形x=[1.8 -1.8 1.8 -1.8]'),grid,axis([0 5 -2 2]),subplot(522),bar(a0,0.1),title('分解后重构波形s=a1+d1'),grid,axis([0 5 -2 2]) subplot(523),bar(Ca1,0.1),title(' 逼近系数Ca1'),grid,axlimdlg, axis([0 5 -2 2]) subplot(524),bar(Cd1,0.1),title(' 细节系数Cd1'),grid,axlimdlg, axis([0 5 0 1])subplot(525),bar(a1,0.1),title(' 一级逼近a1=[1.296,0.911,-0.6502,-1.5585]'),subplot(525),bar(a1,0.1),title(' 一级逼近a1=[ ]'), axlimdlg,grid, axis([0 5 -2 2])subplot(526),bar(d1,0.1),title(' 一级细节d1=[0.504,0.089,-0.3498,-0.2415'), subplot(526),bar(d1,0.1),title(' 一级细节d1=[ ]'),axlimdlg,grid, axis([0 5 -1 1])subplot(527),bar(Lo_D,0.1),title('低通分解滤波器系数Lo_D'),grid, axis([0 5 0 1]) subplot(528),bar(Hi_D,0.1),title('高通分解滤波器系数Hi_D'),grid, axis([0 5 -1 1]) subplot(5,2,9),bar(Lo_R,0.1), title('低通重构滤波器系数Lo_R'),grid, axis([0 5 0 1]), axlimdlg,subplot(5,2,10),bar(Hi_R,0.1),title('高通重构滤波器系数Hi_R'),grid, axis([0 5 -1 1]) axlimdlg,k=[1.8 1.0 -1.0 -1.8];s=[1.296 0.911 -0.6502 -1.5585];t=[0.504 0.089 -0.3498 -0.2415];ss=abs(fft(s,21));tt=abs(fft(t,21));kk=abs(fft(k,21));subplot(311),plot(kk),grid,axlimdlg,subplot(312),plot(ss),grid,axlimdlg,subplot(313),plot(tt),grid,axlimdlg,k1=[1.8 1.0 -1.0 -1.8];s1=[1.4 1.4 -1.4 -1.4];t1=[0.4 -0.4 0.4 -0.4];k2=[1.8 1.0 -1.0 -1.8];s2=[1.296 0.911 -0.6502 -1.5585];t2=[0.504 0.089 -0.3498 -0.2415];S1=abs(fft(s1,21));T1=abs(fft(t1,21));K1=abs(fft(k1,21));S2=abs(fft(s2,21));T2=abs(fft(t2,21));K2=abs(fft(k2,21));subplot(321),plot(K1),grid,axis([1 11 0 6]),title('Harr')subplot(323),plot(S1),grid,axis([1 11 0 6]),title('Harr')subplot(325),plot(T1),grid,axis([1 11 0 2]),title('Harr')subplot(322),plot(K2),grid,axis([1 11 0 6]),title('db40')subplot(324),plot(S2),grid,axis([1 11 0 6]),title('db40')subplot(326),plot(T2),grid,axis([1 11 0 2]),title('db40')disp('**********MALLAT算法可用简单命令DWT,UPCOEF重算如下*******************')x=[1.8 1.0 -1.0 -1.8];length(x); =4[Ca1,Cd1]=dwt(x,'db1');a1=upcoef('a',Ca1,'db1',1,4);d1=upcoef('d',Cd1,'db1',1,4);disp('一级逼近系数Ca1=');disp(Ca1), disp('一级细节系数Cd1=');disp(Cd1),disp('一级逼近a1=');disp(a1), disp('一级细节d1=');disp(d1),x1=a1+d1;a0=idwt(Ca1,Cd1,'db1',4);figure(1),subplot(321),bar(x,0.1),title('x=a1+d1=[1.8 1.0 -1.0 -1.8]'),grid,axis([0 5 -2 2]),subplot(322),bar(a0,0.1),title('a0=idwt=x'),grid,axis([0 5 -2 2])subplot(323),bar(Ca1,0.1),title(' 逼近系数Ca1=[1.98 -1.98]'),grid,axis([0 5 -2 2])subplot(324),bar(Cd1,0.1),title(' 细节系数Cd1=[0.566 0.566]'),grid,axis([0 5 0 1]) subplot(325),bar(a1,0.1),title(' 一级逼近a1=[1.4 1.4 -1.4 -1.4]'),grid,axis([0 5 -1.5 1.5])subplot(326),bar(d1,0.1),title(' 一级细节d1=[0.4 -0.4 0.4 -0.4]'),grid,axis([0 5 -1 1])pausedisp(' *******************************************************************'), disp(' * *'), disp(' * *'), disp(' * 低通滤波器减低通滤波器等于带通滤波器 *'), disp(' * *'), disp(' *******************************************************************'), pause,f=-10:0.01:10;t=-50:1/20:50;y1=cos(2*pi*100*f);y2=cos(2*pi*100*t);y1(1:50)=zeros(1,50);y1(1952:2001)=zeros(1,50);y2(1:250)=zeros(1,250);y2(1752:2001)=zeros(1,250);yy=y1-y2;u=cos(2*pi*7*t);v=sinc(t);r=u.*v;U=fft(u);V=fft(v);R=fft(r);x1=real(ifft(y1));x2=real(ifft(y2));xx=real(ifft(yy));figure(2),subplot(331),plot(f,y1),axis([-12,12,0,1.1]),...title('低通(尺度) Y1(f),Fc=9.5Hz.'),subplot(332),plot(f,y2),axis([-12,12,0,1.1]),...title('低通(尺度) Y2(f),Fc=7.5Hz.'),subplot(333),plot(f,yy),axis([-12,12,0,1.1]),...title('带通(小波) YY(f),BW=2Hz.'),subplot(334),plot(t,ifftshift(x1)),axis([-5 5 -0.1 1.0]),...title('X1(t)=IFFT(Y1)'),xlabel('t(s)'),...subplot(335),plot(t,ifftshift(x2)),axis([-5 5 -0.3 0.8]),...title('X2(t)=IFFT(Y2)'),xlabel('t(s)'),subplot(336),plot(t,ifftshift(xx)),axis([-5 5 -0.1 0.16]),...title('X3(t)=IFFT(YY)'),xlabel('t(s)'),pausedisp(' ******************************************************************'), disp(' * *'), disp(' * 调制引起频移,低通变成带通 *'), disp(' * *'), disp(' ******************************************************************'), pause, figure(3),subplot(331),plot(t,u),axis([-2 2 -1.1 1.1]),title('u=cos(2pi*7t),t=-50~50'),subplot(332),plot(t,v),axis([-4 4 -0.3 1.1]),title('v=sinc(t),t=-50~50')subplot(333),plot(t,r),axis([-4 4 -0.9 1.1]),title('r=uv,t=-50~50')subplot(334),plot(f,abs(U)),axis([-5 5 0 900]),title('FFT(u),F=3Hz'),xlabel('Hz') subplot(335),plot(f,fftshift(abs(V))),axis([-5 5 0 23]),...title('V=FFT(v)),低通:Fc=0.5Hz'),xlabel('Hz')subplot(336),plot(f,abs(R)),axis([-5 5 0 11]),title('FFT(r),带通:BW=1Hz'),...xlabel('Hz'),pause,********************************************************************************* t1=-10:0.02:10;f1=0:0.05:50;ta=-20:0.02:20;tb=0:0.02:40;f1=0:1/40:50;x1=cos(2*pi*50*t1);x2=cos(2*pi*50*[0:0.02:20]);x3=cos(2*pi*50*[20:0.02:40]);xa=[zeros(1,500) x1 zeros(1,500)];xb=[x2 zeros(1,1000)];xc=[zeros(1,1000) x3]; fxa=fft(xa);fxb=fft(xb);fxc=fft(xc);subplot(531),plot(ta,xa),axis([-20 20 0 1.1]),title(''),subplot(532),plot(tb,xb),axis([0 40 0 1.1]),title(''),subplot(533),plot(tb,xc),axis([0 40 0 1.1]),title(''),subplot(534),plot(f1,abs(fxa)),grid,axlimdlg,title(''),subplot(535),plot(f1,abs(fxb)),grid,axlimdlg,title(''),subplot(536),plot(f1,abs(fxc)),grid,axlimdlg,title(''),subplot(537),plot(f1,angle(fxa)),grid,axlimdlg,title(''),subplot(538),plot(f1,angle(fxb)),grid,axlimdlg,title(''),subplot(539),plot(f1,angle(fxc)),grid,axlimdlg,title(''),subplot(5,3,10),plot(f1,unwrap(angle(fxa))),grid,axlimdlg,title(''),subplot(5,3,11),plot(f1,unwrap(angle(fxb))),grid,axlimdlg,title(''),subplot(5,3,12),plot(f1,unwrap(angle(fxc))),grid,axlimdlg,title(''),disp('**************************END***********************************'),。
小波的几个术语及常见的小波基介绍解析

小波的几个术语及常见的小波基介绍本篇是这段时间学习小波变换的一个收尾,了解一下常见的小波函数,混个脸熟,知道一下常见的几个术语,有个印象即可,这里就当是先作一个备忘录,以后若有需要再深入研究。
一、小波基选择标准小波变换不同于傅里叶变换,根据小波母函数的不同,小波变换的结果也不尽相同。
现实中到底选择使用哪一种小波的标准一般有以下几点:1、支撑长度小波函数Ψ(t)、Ψ(ω)、尺度函数φ(t)和φ(ω)的支撑区间,是当时间或频率趋向于无穷大时,Ψ(t)、Ψ(ω)、φ(t)和φ(ω)从一个有限值收敛到0的长度。
支撑长度越长,一般需要耗费更多的计算时间,且产生更多高幅值的小波系数。
大部分应用选择支撑长度为5~9之间的小波,因为支撑长度太长会产生边界问题,支撑长度太短消失矩太低,不利于信号能量的集中。
这里常常见到“紧支撑”的概念,通俗来讲,对于函数f(x),如果自变量x在0附近的取值范围内,f(x)能取到值;而在此之外,f(x)取值为0,那么这个函数f(x)就是紧支撑函数,而这个0附近的取值范围就叫做紧支撑集。
总结为一句话就是“除在一个很小的区域外,函数为零,即函数有速降性”。
2、对称性具有对称性的小波,在图像处理中可以很有效地避免相位畸变,因为该小波对应的滤波器具有线性相位的特点。
3、消失矩在实际中,对基本小波往往不仅要求满足容许条件,对还要施加所谓的消失矩(Vanishing Moments)条件,使尽量多的小波系数为零或者产生尽量少的非零小波系数,这样有利于数据压缩和消除噪声。
消失矩越大,就使更多的小波系数为零。
但在一般情况下,消失矩越高,支撑长度也越长。
所以在支撑长度和消失矩上,我们必须要折衷处理。
小波的消失矩的定义为,若其中,Ψ(t)为基本小波,0<=p<N。
则称小波函数具有N阶消失矩。
从上式还可以得出,同任意n-1阶多项式正交。
在频域内表示就是Ψ(ω)在ω=0处有高阶零点(一阶零点就是容许条件)。
小波基础知识 PPT课件
设T : X
军事电子对抗与武器的智能化;计算机分 类与识别;音乐与语言的人工合成;医学 成像与诊断;地震勘探数据处理;大型机 械的故障诊断等方面;例如,在数学方面, 它已用于数值分析、构造快速数值方法、 曲线曲面构造、微分方程求解、控制论等。 在信号分析方面的滤波、去噪声、压缩、 传递等。在图象处理方面的图象压缩、分 类、识别与诊断,去污等。在医学成像方 面的减少B超、CT、核磁共振成像的时间, 提高分辨率等。
2
2
3
V,ej
2
v2
2
j 1
3 2
v1
1 2
v2
3 2
v1
1 2
v2
3 2
[
v1
2
v2
2]
3 2
V
定义、定理及证明
1. (巴拿赫)Banach空间与Hibert(西耳伯特) 空间
由于F(0) = 0,故 =0
2. 线性算子与同构
我们只考虑可分的Hilbert空间。
1986年著名数学家Y.Meyer偶然构造出一个真正的 小波基,并与S.Mallat合作建立了构造小波基的 同样方法及其多尺度分析之后,小波分析才开始 蓬勃发展起来,其中比利时女数学家 I.Daubechies撰写的《小波十讲(Ten Lectures on Wavelets)》对小波的普及起了重要的推动作 用。它与Fourier变换、窗口Fourier变换(Gabor 变换)相比,这是一个时间和频率的局域变换, 因而能有效的从信号中提取信息,通过伸缩和平 移等运算功能对函数或信号进行多尺度细化分析 (Multiscale Analysis),解决了Fourier变换 不能解决的许多困难问题,从而小波变化被誉为 “数学显微镜”,它是调和分析发展史上里程碑 式的进展。
小波的几个术语及常见的小波基介绍

小波的几个术语及常见的小波基介绍本篇是这段时间学习小波变换的一个收尾,了解一下常见的小波函数,混个脸熟,知道一下常见的几个术语,有个印象即可,这里就当是先作一个备忘录,以后若有需要再深入研究。
一、小波基选择标准小波变换不同于傅里叶变换,根据小波母函数的不同,小波变换的结果也不尽相同。
现实中到底选择使用哪一种小波的标准一般有以下几点:1、支撑长度小波函数Ψ(t)、Ψ(ω)、尺度函数φ(t)和φ(ω)的支撑区间,是当时间或频率趋向于无穷大时,Ψ(t)、Ψ(ω)、φ(t)和φ(ω)从一个有限值收敛到0的长度。
支撑长度越长,一般需要耗费更多的计算时间,且产生更多高幅值的小波系数。
大部分应用选择支撑长度为5~9之间的小波,因为支撑长度太长会产生边界问题,支撑长度太短消失矩太低,不利于信号能量的集中。
这里常常见到“紧支撑”的概念,通俗来讲,对于函数f(x),如果自变量x在0附近的取值范围内,f(x)能取到值;而在此之外,f(x)取值为0,那么这个函数f(x)就是紧支撑函数,而这个0附近的取值范围就叫做紧支撑集。
总结为一句话就是“除在一个很小的区域外,函数为零,即函数有速降性”。
2、对称性具有对称性的小波,在图像处理中可以很有效地避免相位畸变,因为该小波对应的滤波器具有线性相位的特点。
3、消失矩在实际中,对基本小波往往不仅要求满足容许条件,对还要施加所谓的消失矩(Vanishing Moments)条件,使尽量多的小波系数为零或者产生尽量少的非零小波系数,这样有利于数据压缩和消除噪声。
消失矩越大,就使更多的小波系数为零。
但在一般情况下,消失矩越高,支撑长度也越长。
所以在支撑长度和消失矩上,我们必须要折衷处理。
小波的消失矩的定义为,若其中,Ψ(t)为基本小波,0<=p<N。
则称小波函数具有N阶消失矩。
从上式还可以得出,同任意n-1阶多项式正交。
在频域内表示就是Ψ(ω)在ω=0处有高阶零点(一阶零点就是容许条件)。
小波变换名词解释

小波变换名词解释
小波变换(Wavelet Transformer)是一种基于矩阵分解和线性代数运算的数学工具,用于将高维数据映射到低维空间中,同时保留数
据中的模式和特征。
小波变换主要分为三种类型:小波基(Waveletzeros)、小波函数(Wavelet Functions)和小波样条函数(Wavelet Series Function)。
小波基是一种离散化的高维数据,小波函数和小波样条函数则是用高维数据表示的线性变换。
小波变换可以通过矩阵分解的方式实现,将高维数据映射到低维空间中,同时保留数据中的模式和特征。
在这个过程中,矩阵分解和线性代数运算是必不可少的。
小波变换广泛应用于信号处理、图像处理、模式识别、计算机视觉等领域。
它可以提取数据中的高频和低频分量,从而实现对数据的分析和理解。
第十二讲 小波基构造与常用小波 ppt课件
其输出信号的相位特性,除一常数外,与延时为 的输入信号 f (x )
的相位特性完全一致。也就是说,当滤波器具有线性相位时,输出信
ppt课件
9
号将不产生相位畸变。
原始信号
非畸变信号
畸变信号
ppt课件
10
2 常用小波
Haar 小波 Mexican hat 小波 Morlet 小波 Meyer 小波 Daubechies 小波系 Coiflet 小波系 Biorthogonal 小波系
k0
N k
k
1xk
ppt课件
24
3.3 构造步骤(二)
利用欧拉公式转化为含 e j 的各次幂的多项式,然后以 z e j 代替,
从而得到关于 z 的多项式 M (z) ,其中 M (z) 具有以下形式
M
(z)
a0
1 2
N 1
an (zn
n 1
zn)
ppt课件
ppt课件
11
2.1 Haar小波
Haar 小波是一个最早应用也是最简单的具有紧支撑的正交小波 函数,其定义如下:
1, 0x1/ 2 (x) 1, 1/ 2x1
0 其它
ppt课件
12
2.2 墨西哥帽小波
ppt课件
29
求得 M (z) 0 的两个实根为
z1,2 2 3
因为
c
1 2
|
a1
|
1 2
,可得
m()
e j c(
z1
z1 )
1
e j
(
2 3)
2 2 3
1 2e j 1
小波基构造与常用小波
小波基的特点
01
02
03
多尺度分析
小波基具有多尺度分析的 特性,能够同时分析信号 在不同尺度和频率下的特 征。
灵活性
小波基具有多种不同的形 状和大小,可以根据实际 需求选择适合的小波基进 行信号处理。
高效性
小波基的变换算法具有高 效性,能够快速地完成信 号的分解和重构。
小波基的应用领域
信号处理
小波基在信号处理领域应用广泛,如信号去噪、 特征提取、压缩编码等。
信号检测
信号检测
小波变换具有良好的时频局部化特性,能够检测信号中的突变和异常。通过选择 合适的小波基和阈值,可以将信号中的突变和异常成分提取出来。
检测算法
常用的检测算法包括小波变换模极大值检测和基于小波变换的统计检测。小波变 换模极大值检测是根据小波变换的模极大值点进行突变检测,基于小波变换的统 计检测是根据小波变换系数的统计性质进行异常检测。
THANKS
感谢观看
应用
Daubechies小波基在信号处理、图像处理、数值分析等领域有 广泛的应用。
Symlets小波基
1 2
定义
Symlets小波基是一类对称的小波基,其定义基 于Daubechies小波基的改进。
特性
Symlets小波基具有对称性、紧支撑性和近似正 交性等特性,能够提供更好的信号表示能力。
3
应用
05
小波基在图像处理中的应用
图像压缩
01
图像压缩
小波变换可以将图像分解为不同频率的子带,通过去除高频部分的数据,
达到压缩图像的目的。
02 03
压缩比
小波变换的压缩比通常比传统的JPEG压缩方法更高,因为JPEG压缩方 法只去除空间域中的冗余数据,而小波变换同时去除空间域和频率域中 的冗余数据。
小波变换去噪基础知识整理

1.小波变换的概念小波(Wavelet)这一术语,顾名思义,“小波”就是小的波形。
所谓“小”是指它具有衰减性;而称之为“波”则是指它的波动性,其振幅正负相间的震荡形式。
与Fourier变换相比,小波变换是时间(空间)频率的局部化分析,它通过伸缩平移运算对信号(函数)逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,能自动适应时频信号分析的要求,从而可聚焦到信号的任意细节,解决了Fourier变换的困难问题,成为继Fourier变换以来在科学方法上的重大突破。
有人把小波变换称为“数学显微镜”。
2.小波有哪几种形式?常用的有哪几种?具体用哪种,为什么?有几种定义小波(或者小波族)的方法:缩放滤波器:小波完全通过缩放滤波器g——一个低通有限脉冲响应(FIR)长度为2N和为1的滤波器——来定义。
在双正交小波的情况,分解和重建的滤波器分别定义。
高通滤波器的分析作为低通的QMF来计算,而重建滤波器为分解的时间反转。
例如Daubechies和Symlet 小波。
缩放函数:小波由时域中的小波函数(即母小波)和缩放函数(也称为父小波)来定义。
小波函数实际上是带通滤波器,每一级缩放将带宽减半。
这产生了一个问题,如果要覆盖整个谱需要无穷多的级。
缩放函数滤掉变换的最低级并保证整个谱被覆盖到。
对于有紧支撑的小波,可以视为有限长,并等价于缩放滤波器g。
例如Meyer小波。
小波函数:小波只有时域表示,作为小波函数。
例如墨西哥帽小波。
3.小波变换分类小波变换分成两个大类:离散小波变换(DWT) 和连续小波转换(CWT)。
两者的主要区别在于,连续变换在所有可能的缩放和平移上操作,而离散变换采用所有缩放和平移值的特定子集。
DWT用于信号编码而CWT用于信号分析。
所以,DWT通常用于工程和计算机科学而CWT经常用于科学研究。
4.小波变换的优点从图像处理的角度看,小波变换存在以下几个优点:(1)小波分解可以覆盖整个频域(提供了一个数学上完备的描述)(2)小波变换通过选取合适的滤波器,可以极大的减小或去除所提取得不同特征之间的相关性(3)小波变换具有“变焦”特性,在低频段可用高频率分辨率和低时间分辨率(宽分析窗口),在高频段,可用低频率分辨率和高时间分辨率(窄分析窗口)(4)小波变换实现上有快速算法(Mallat小波分解算法)另:1) 低熵性变化后的熵很低;2) 多分辨率特性边缘、尖峰、断点等;方法, 所以可以很好地刻画信号的非平稳特性3) 去相关性域更利于去噪;4) 选基灵活性: 由于小波变换可以灵活选择基底, 也可以根据信号特性和去噪要求选择多带小波、小波包、平移不变小波等。
常用小波的分类

2.常用的基本小波
Mexican hat小波
该小波的中文名字为“墨西哥草帽”小波,又称 Marr小波。
2
t 2 / 2
2 1/ 4 ,其傅里叶变换为 式中 c 3 2 2 / 2 () 2 c e
该小波是由一高斯函数的二阶导数所得到的,其波形 和其频谱如图所示。
db小波的特点外,主要是 (t ) 是接近对称的,因此,
所用的滤波器可接近于线性相位。下图中是N=4时
的对称小波。
2016/3/2
21
3.正交小波
Sym4: Phi 1.2 1.5 Sym4: Psi 1 1 0.8 0.5 0.6 0 0.4 -0.5 0.2 -1
0
-0.2
0
2
4
6
8
-1.5
1 0 -1 0 1 2 1 0 -1 3 0 1 0 2 4 -1 0 2 4 1 0 1 0 5 10
d b2
1 0 -1 0 5 10
-1 -1 6 0 2 4 6 8 0
d b3
1 0 -1 0 5 10 15
d b4
1 0 -1 0 5
d b5
1 0 -1 0 10 15 5
d b6
10 15
2016/3/2 14
2.常用的基本小波
Gaussian wavelet: Psi 1.2 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -10 0 5 15 The FT of Psi 10
-5
0
5
10
0
0.5
1
高斯小波,取k=4,(a)时域波形,(b)频谱
2016/3/2 15
小波分析基础

College of Mathematics and Computer Science, Hebei University 例2、信号逼近:如图(a)和(b)是原始信号,其余的是逼近信号。
College of Mathematics and Computer Science, Hebei University
(t)
1
1
x0,
1 2
x12
,1
(1.11)
College of Mathematics and Computer Science, Hebei University
数学上已经证明:
( 2 jt k ) |j ,k Z
(1.12)
构成L2(R)的一个正交基,通过规范化处理, j
ak
2 T
0Tf(t)coks0td, t k0,1,2
(1.5)
bk
2 T
T
f
0
(t)sink0td, t k0,1,2
(1.6)
于是,周期函数f(t) 就与下面的傅立叶序列产生了一一对应, 即
f ( t ) a 0 , ( a 1 , b 1 ) ( a 2 , b 2 ) , (1.7)
College of Mathematics and Computer Science, Hebei University
可以这样理解小波变换的含义:打个比喻,我们 用镜头观察目标信号f (t), ψ(t)代表镜头所起的所用。 b 相当于使镜头相对于目标平行移动,a的所用相当于 镜头向目标推进或远离。由此可见,小波变换有以下 特点: ➢ 多尺度/多分辨的特点,可以由粗及细地处理信号;
数表示成如下形式:
f(t)a 2 0i 1 (a kco k0 s tb ksikn 0t)
有关小波的几个术语及常见的小波基介绍
General characteristics: Compactlysupported
wavelets with highest number of vanishing
moments for both phi and psi for a given support width.
5、相似性
选择和信号波形相似的小波,这对于压缩和消噪是有参考价值的。
二、常见的小波基
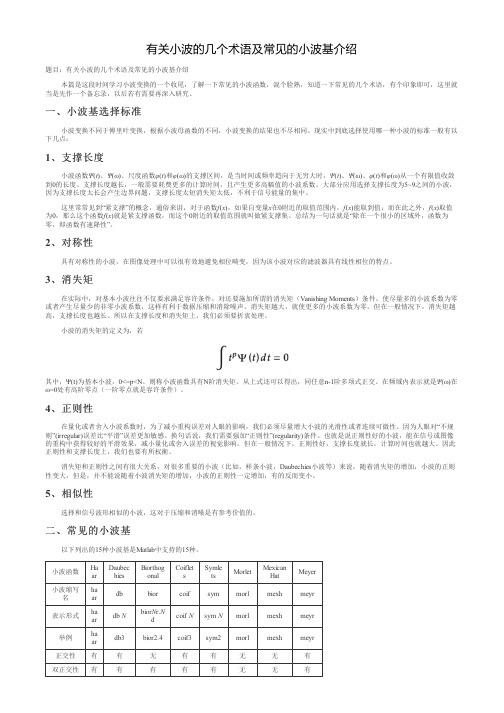
以下列出的15种小波基是Matlab中支持的15种。
小波函数
Ha ar
Daubec hies
Biorthog onal
Coiflet s
Symle ts
Morlet
Mexican Hat
Meyer
小波缩写 ha
名
ar
Symlet小波函数是IngridDaubechies提出的近似对称的小波函数,它是对db函数的一种改进。Symlet小波系通常表示为symN (N=2,3, …,8)。symN小波的支撑范围为2N-1,消失矩为N,同时也具备较好的正则性。该小波与dbN小波相比,在连续性、支集长度、滤波器长度 等方面与dbN小波一致,但symN小波具有更好的对称性,即一定程度上能够减少对信号进行分析和重构时的相位失真。
可以
不可 以
不可以
有限 有限长
2N-1 长度
度
2N [-4, 4] [-5, 5]
近似 对称
对称
对称
N
-
-
-
-
-
无 可以 可以
但无F WT
有限 长度
[-8, 8]
对称
不同小波基下初始信号的小波变换
小波变换是一种信号分析技术,可以将信号分解为不同尺度和频率的成分。
不同小波基函数可以用于对初始信号进行小波变换,每种小波基函数都具有不同的特性和适用场景。
下面是一些常见的小波基函数和它们的特点:
Haar小波基:是最简单的小波基函数之一,适用于处理突变信号,对于突变边缘的定位能力较好。
Daubechies小波基:Daubechies小波基是最常用的小波基之一,具有紧凑的支持区域和良好的频率局部化特性,可用于平滑和压缩信号。
Symlet小波基:Symlet小波基是Daubechies小波基的对称扩展,适用于平稳和非平稳信号的分析。
Coiflet小波基:Coiflet小波基在高频区域具有更好的逼近性能,适用于信号的边缘检测和平滑处理。
Morlet小波基:Morlet小波基是一种连续小波变换的基函数,常用于时频分析,特别是在处理频谱分析和信号中的瞬态特征方面。
对于给定的初始信号,可以选择适合的小波基函数进行小波变换。
不同的小波基函数在时域和频域上具有不同的性质和适用范围,因此在选择小波基函数时需要考虑信号的特点和分析目的。
11小波基础
H 1
1 x 1 2
0
0 其它
1
【解】
ˆ ()
(t)eitdt
1
2 eit dt
0
1 1
eit
dt
2
eit
i
1 2
eit
i
1 1
1
i
i e 2
2
1
0
2
1
i
e2
cos
2
v
3 4
1
4
8
3
3
0
2 3
8 ,
3
vt t4 35 84t 70t2 20t3 t 0,1
t
常用小波的分类剖析

0
6
4
-0.2 2
-0.4
0
-4 -2
0
2
4
0
0.5
1
墨西哥草帽小波,(a)时域波形,(b)频谱
2020/11/8
12
2.常用的基本小波
Mexican hat小波不是紧支撑的,不是
正交的,也不是双正交的,但它是对称 的,可用于连续小波变换。由于该小波 在 处0 有二阶零点,因此它满足容许 条件,且该小波比较接近人眼视觉的空 间响应特征
Haar小波是不连续小波,由于 t (t)dt 0 , 因此处() 只有一阶零点 0 ,这就使 得Haar小波在实际的信号分析与处理中 受到了限制。
2020/11/8
7
2.常用的基本小波
Morlet小波
Morlet小波定义为
(t) et2 / 2e jt
其傅里叶变换
() 2 e(0 )2 / 2
(t), (2 j t) 0 • Haar波是对称的。系统的单位冲击响应若具有对称性,
则该系统具有线性相位,这对于去除相位失真是非常有 利的。Haar小波是目前唯一一个既具有对称性又是有限 支撑的正交小波;
• Haar小波仅取+1和-1,计算简单。
2020/11/8
6
2.常用的基本小波
➢ Haar小波缺点
2020/11/8
3
2.常用的基本小波
Haar小波
Haar小波来自于数学家Haar于1910年提出的 Haar正交函数集,其定义是:
1
(t) 1
0
0 t 1/ 2
1/
2
t
1
其它
其波形如图所示。 (t的) 傅里叶变换是:
小波的几个术语及常见的小波基介绍
本篇是这段时间学习小波变换的一个收尾,了解一下常见的小波函数,混个这里就当是先作一个备忘录,以后若有需脸熟,知道一下常见的几个术语,有个印象即可,要再深入研究。
一、小波基选择标准小波变换不同于傅里叶变换,根据小波母函数的不同,小波变换的结果也不尽相同。
现实中到底选择使用哪一种小波的标准一般有以下几点:1、支撑长度小波函数Ψ(t)、Ψ(ω)、尺度函数φ(t)和φ(ω)的支撑区间,是当时间或频率趋向于无穷大时,Ψ(t)、Ψ(ω)、φ(t)和φ(ω)从一个有限值收敛到0的长度。
支撑长度越长,一般需要耗费更多的计算时间,且产生更多高幅值的小波系数。
大部分应用选择支撑长度为5~9之间的小波,因为支撑长度太长会产生边界问题,支撑长度太短消失矩太低,不利于信号能量的集中。
这里常常见到“紧支撑”的概念,通俗来讲,对于函数f(x),如果自变量x在0附近的取值范围内,f(x)能取到值;而在此之外,f(x)取值为0,那么这个函数f(x)就是紧支撑函数,而这个0附近的取值范围就叫做紧支撑集。
总结为一句话就是“除在一个很小的区域外,函数为零,即函数有速降性”。
2、对称性具有对称性的小波,在图像处理中可以很有效地避免相位畸变,因为该小波对应的滤波器具有线性相位的特点。
3、消失矩在实际中,对基本小波往往不仅要求满足容许条件,对还要施加所谓的消失矩(Vanishing Moments)条件,使尽量多的小波系数为零或者产生尽量少的非零小波系数,这样有利于数据压缩和消除噪声。
消失矩越大,就使更多的小波系数为零。
但在一般情况下,消失矩越高,支撑长度也越长。
所以在支撑长度和消失矩上,我们必须要折衷处理。
小波的消失矩的定义为,若其中,Ψ(t)为基本小波,0<=p<N。
则称小波函数具有N阶消失矩。
从上式还可以得出,同任意n-1阶多项式正交。
在频域内表示就是Ψ(ω)在ω=0处有高阶零点(一阶零点就是容许条件)。
4、正则性在量化或者舍入小波系数时,为了减小重构误差对人眼的影响,我们必须尽量增大小波的光滑性或者连续可微性。
小波基本理论及应用PPT课件

小波变换的应用领域
信号处理
小波变换在信号处理领域应用广泛,可 以用于信号的降噪、压缩、识别和分类
等。
模式识别
小波变换可以用于模式识别中的特征 提取和分类器设计,如人脸识别、语
小波基本理论及应用ppt课 件
目录
• 小波理论概述 • 小波变换的数学基础 • 小波变换的算法实现 • 小波变换在信号处理中的应用 • 小波变换在图像处理中的应用 • 小波变换在其他领域的应用
01
小波理论概述
小波的定义与特性
小波的定义
小波是一种特殊的函数,其时间窗和频率窗都可以改变,且在时间域和频率域 都具有很好的局部化特性。
在信号处理中,通过调整小波变换的尺度和平移参数,可 以得到信号在不同时间和频率下的局部信息,从而更好地 理解信号的特征和性质。
03
小波变换的算法实现
一维小波变换算法
一维小波变换算法是实现小波变换的基本方法之一,它通过对一维信号进行多尺度分析,将信号分解 成不同频率和不同时间分辨率的成分。
一维小波变换算法可以分为连续小波变换和离散小波变换两种,其中离散小波变换在实际应用中更为广 泛。
量子纠缠的检测
小波变换可以用于检测量子纠缠,有 助于理解和应用量子纠缠的性质。
量子计算中的优化问题
小波变换可以用于优化量子计算中的 某些问题,提高量子计算的效率。
量子模拟中的近似方法
小波变换可以用于近似求解某些量子 模拟问题,提供一种有效的近似方法。
在金融领域的应用
金融数据分析
小波变换可以用于金融数据分析,如股票价 格、外汇汇率和商品价格等的分析。
小波的几个术语及常见的小波基介绍

小波的几个术语及常见的小波基介绍小波分析是一种数学工具,用于在信号和图像处理中分析和处理数据。
小波是由时间和频率两个维度组成的,因此可以提供更加详细和全面的数据描述。
在小波分析中,有一些重要的术语和常见的小波基,下面将进行详细介绍。
几个术语:1. 小波函数(Wavelet Function):小波函数是指满足特定条件的函数,用于构造小波分析。
小波函数可以通过伸缩(Scaling)和平移(Translation)操作得到不同频率和时间的小波基函数。
2. 尺度(Scale):尺度是用来调整小波函数的大小,尺度越大,小波函数的时间范围越大,频率范围越低。
尺度通过尺度变换(Scaling Function)来进行调整。
3. 位移(Translation):位移是用来调整小波函数的位置,位移参数决定了小波函数在时间轴上的位置。
位移通过位移变换(Translation Function)来进行调整。
4. 连续小波变换(Continuous Wavelet Transform,CWT):连续小波变换是指将信号与小波函数进行卷积运算,得到一系列的小波系数。
这种变换能够提供信号在不同尺度和位置上的频率信息。
5. 离散小波变换(Discrete Wavelet Transform,DWT):离散小波变换是指将信号通过一系列的滤波和下采样操作,得到一组小波系数。
这种变换可以实现高效的小波分析,并且能够提供信号在不同尺度上的频率信息。
常见的小波基:1. Haar小波:Haar小波是最简单的小波基函数,它只有两个系数,分别为±1、Haar小波具有边缘保持性质(Edge Preserving),能够有效提取信号的边缘信息。
2. Daubechies小波:Daubechies小波是一类广泛使用的小波基函数,由Ingrid Daubechies提出。
它的设计基于幂等滤波器(Idempotent Filter),可以提供精确的尺度变换和频率分析。
掌握小波变换的关键概念与术语

掌握小波变换的关键概念与术语小波变换是一种用于信号分析和处理的重要工具,它在多个领域中都有广泛的应用。
掌握小波变换的关键概念与术语对于理解和应用这一技术至关重要。
一、小波变换的基本概念小波变换是一种将信号分解成不同频率的成分的方法。
与傅里叶变换相比,小波变换具有更好的时频局部性质,能够更准确地描述信号的瞬时特征。
1. 小波函数小波函数是小波变换的基础,它是一种特殊的函数形式,具有有限的持续时间和频率。
常见的小波函数有Morlet小波、Daubechies小波等。
不同的小波函数适用于不同类型的信号分析。
2. 尺度与平移在小波变换中,尺度(scale)和平移(shift)是两个重要的概念。
尺度表示小波函数的频率特性,而平移表示小波函数在时间上的移动。
通过改变尺度和平移,可以对信号进行多尺度分析,从而揭示信号的不同频率成分。
3. 连续小波变换与离散小波变换连续小波变换(CWT)是指对信号在连续尺度上进行小波变换。
离散小波变换(DWT)是指对信号在离散尺度上进行小波变换。
离散小波变换具有计算效率高、存储空间小等优点,因此在实际应用中更为常用。
二、小波分析的关键术语小波分析是指利用小波变换对信号进行分析的过程,其中涉及到一些关键的术语。
1. 尺度图(scaleogram)尺度图是用来表示小波分析结果的一种图形表示方法。
在尺度图中,横轴表示时间,纵轴表示尺度,图像的颜色或亮度表示信号的能量或幅度。
通过观察尺度图,可以直观地了解信号的频率分布和时频特性。
2. 尺度系数(scale coefficient)尺度系数是小波分析中得到的一组数字,表示信号在不同尺度上的能量或幅度。
尺度系数可以用来分析信号的频率成分和时域特征。
3. 尺度函数(scale function)尺度函数是用来描述小波函数在不同尺度上的形态变化的函数。
通过尺度函数,可以将信号在不同尺度上进行分解和重构。
三、小波变换的应用领域小波变换作为一种强大的信号处理工具,在多个领域中都有广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小波的几个术语及常见的小波基介绍本篇是这段时间学习小波变换的一个收尾,了解一下常见的小波函数,混个脸熟,知道一下常见的几个术语,有个印象即可,这里就当是先作一个备忘录,以后若有需要再深入研究。
一、小波基选择标准小波变换不同于傅里叶变换,根据小波母函数的不同,小波变换的结果也不尽相同。
现实中到底选择使用哪一种小波的标准一般有以下几点:1、支撑长度小波函数Ψ(t)、Ψ(ω)、尺度函数φ(t)和φ(ω)的支撑区间,是当时间或频率趋向于无穷大时,Ψ(t)、Ψ(ω)、φ(t)和φ(ω)从一个有限值收敛到0的长度。
支撑长度越长,一般需要耗费更多的计算时间,且产生更多高幅值的小波系数。
大部分应用选择支撑长度为5~9之间的小波,因为支撑长度太长会产生边界问题,支撑长度太短消失矩太低,不利于信号能量的集中。
这里常常见到“紧支撑”的概念,通俗来讲,对于函数f(x),如果自变量x在0附近的取值范围内,f(x)能取到值;而在此之外,f(x)取值为0,那么这个函数f(x)就是紧支撑函数,而这个0附近的取值范围就叫做紧支撑集。
总结为一句话就是“除在一个很小的区域外,函数为零,即函数有速降性”。
2、对称性具有对称性的小波,在图像处理中可以很有效地避免相位畸变,因为该小波对应的滤波器具有线性相位的特点。
3、消失矩在实际中,对基本小波往往不仅要求满足容许条件,对还要施加所谓的消失矩(Vanishing Moments)条件,使尽量多的小波系数为零或者产生尽量少的非零小波系数,这样有利于数据压缩和消除噪声。
消失矩越大,就使更多的小波系数为零。
但在一般情况下,消失矩越高,支撑长度也越长。
所以在支撑长度和消失矩上,我们必须要折衷处理。
小波的消失矩的定义为,若其中,Ψ(t)为基本小波,0<=p<N。
则称小波函数具有N阶消失矩。
从上式还可以得出,同任意n-1阶多项式正交。
在频域内表示就是Ψ(ω)在ω=0处有高阶零点(一阶零点就是容许条件)。
4、正则性在量化或者舍入小波系数时,为了减小重构误差对人眼的影响,我们必须尽量增大小波的光滑性或者连续可微性。
因为人眼对“不规则”(irregular)误差比“平滑”误差更加敏感。
换句话说,我们需要强加“正则性”(regularity)条件。
也就是说正则性好的小波,能在信号或图像的重构中获得较好的平滑效果,减小量化或舍入误差的视觉影响。
但在一般情况下,正则性好,支撑长度就长,计算时间也就越大。
因此正则性和支撑长度上,我们也要有所权衡。
消失矩和正则性之间有很大关系,对很多重要的小波(比如,样条小波,Daubechies 小波等)来说,随着消失矩的增加,小波的正则性变大,但是,并不能说随着小波消失矩的增加,小波的正则性一定增加,有的反而变小。
5、相似性选择和信号波形相似的小波,这对于压缩和消噪是有参考价值的。
二、常见的小波基以下列出的15种小波基是Matlab中支持的15种。
小波函数Haar Daubechies Biorthogonal Coiflets Symlets Morlet MexicanHatMeyer小波缩写名haar db bior coif sym morl mexh meyr 表示形式haar db N biorNr.Nd coif N sym N morl mexh meyr 举例haar db3bior2.4coif3sym2morl mexh meyr 正交性有有无有有无无有1、Haar小波Haar,一般音译为“哈尔”。
Haar函数是小波分析中最早用到的一个具有紧支撑的正交小波函数,也是最简单的一个小波函数,它是支撑域在t∈[0,1]范围内的单个矩形波。
Haar小波在时域上是不连续的,所以作为基本小波性能不是特别好。
在Matlab中输入命令waveinfo('haar')可得到如下信息:General characteristics: Compactlysupportedwavelet, the oldest and the simplestwavelet.scaling function phi = 1 on [0 1] and 0otherwise.wavelet function psi = 1 on [0 0.5], = -1on [0.5 1] and 0 otherwise.Family HaarShort name haarExamples haar is the same as db1Orthogonal yesBiorthogonal yesCompact support yesDWT possibleCWT possibleSupport width 1Filters length 2Regularity haar is not continuousSymmetry yesNumber of vanishingmoments for psi 12、Daubechies(dbN)小波(紧支集正交小波)Daubechies,一般音译为“多贝西”。
Daubechies小波是由世界著明的小波分析学者Ingrid Daubechies(一般音译为英格丽·多贝西)构造的小波函数,我们一般简写成dbN,N是小波的阶数。
小波函数Ψ(t)和尺度函数φ(t)中的支撑区为2N-1,Ψ(t)的消失矩为N。
dbN小波具有较好的正则性,即该小波作为稀疏基所引入的光滑误差不容易被察觉,使得信号重构过程比较光滑。
dbN小波的特点是随着阶次(序列N)的增大消失矩阶数越大,其中消失矩越高光滑性就越好,频域的局部化能力就越强,频带的划分效果越好,但是会使时域紧支撑性减弱,同时计算量大大增加,实时性变差。
另外,除N=1外,dbN小波不具有对称性(即非线性相位),即在对信号进行分析和重构时会产生一定的相位失真。
dbN没有明确的表达式(除了N=1外,N=1时即为Haar小波)。
在Matlab中输入命令waveinfo('db')可得到如下信息:General characteristics: Compactlysupportedwavelets with extremal phase and highestnumber of vanishing moments for a givensupport width. Associated scaling filtersareminimum-phase filters.Family DaubechiesShort name dbOrder N N strictly positive integerExamples db1 or haar, db4, db15Orthogonal yesBiorthogonal yesCompact support yesDWT possibleCWT possibleSupport width 2N-1Filters length 2NRegularity about 0.2 N for large NSymmetry far fromNumber of vanishingmoments for psi N3、Symlet(symN)小波(近似对称的紧支集正交小波)Symlet小波函数是IngridDaubechies提出的近似对称的小波函数,它是对db函数的一种改进。
Symlet小波系通常表示为symN (N=2,3,…,8)。
symN小波的支撑范围为2N-1,消失矩为N,同时也具备较好的正则性。
该小波与dbN小波相比,在连续性、支集长度、滤波器长度等方面与dbN小波一致,但symN小波具有更好的对称性,即一定程度上能够减少对信号进行分析和重构时的相位失真。
在Matlab中输入命令waveinfo('sym')可得到如下信息:General characteristics: Compactlysupported wavelets withleast asymmetry and highest number ofvanishing momentsfor a given support width.Associated scaling filters are nearlinear-phase filters.Family SymletsShort name symOrder N N = 2, 3, ...Examples sym2, sym8Orthogonal yesBiorthogonal yesCompact support yesDWT possibleCWT possibleSupport width 2N-1Filters length 2NRegularitySymmetry near fromNumber of vanishingmoments for psi N4、Coiflet(coifN)小波根据R.Coifman的要求,Daubechies构造了Coiflet小波,它具有coifN (N=1,2,3,4,5)这一系列。
Coiflet的小波函数Ψ(t)的2N阶矩为零,尺度函数φ(t)的2N-1阶矩为零。
Ψ(t)和φ(t)的支撑长度为6N-1。
Coiflet的Ψ(t)和φ(t)具有比dbN更好的对称性。
在Matlab中输入命令waveinfo('coif')可得到如下信息:General characteristics: Compactlysupportedwavelets with highest number of vanishingmoments for both phi and psi for a givensupport width.Family CoifletsShort name coifOrder N N = 1, 2, ..., 5Examples coif2, coif4Orthogonal yesBiorthogonal yesCompact support yesDWT possibleCWT possibleSupport width 6N-1Filters length 6NRegularitySymmetry near fromNumber of vanishingmoments for psi 2NNumber of vanishingmoments for phi 2N-15、Biorthogonal(biorNr.Nd)小波为了解决对称性和精确信号重构的不相容性,引入了双正交小波,称为对偶的两个小波分别用于信号的分解和重构。
双正交小波解决了线性相位和正交性要求的矛盾。