强度和塑性理论新探(高万章 著)思维导图
合集下载
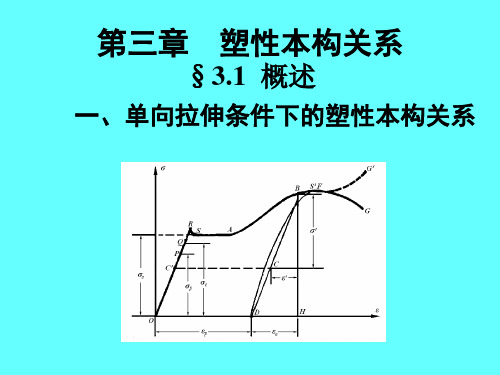
塑性力学课件 第三章
2 1 OA′ = OA sin α = 1 − σ1 = 3 3
2
(a)
' Oσ 2 其长度 同理, 同理 AB 在π平面上的方向平行于 平面上的方向平行于 ,
为:
2 A′B′ = σ 2 (b) 3 ' BP 在π平面上的方向平行于 Oσ 3,其长度为 其长度为:
ห้องสมุดไป่ตู้
§3.3 应力空间与屈服曲面
一、应力空间的概念
把六个应力分量看成六维空间的坐标, 把六个应力分量看成六维空间的坐标,则 每一应力状态就相当于六维空间中的一个点。 每一应力状态就相当于六维空间中的一个点 。 称这个六维空间为六维应力空间。 称这个六维空间为六维应力空间 。 屈服条件 ( 3—1)式就是六维应力空间中的一个超曲面 ) 为了区别于普通三维空间中的曲面, ( 为了区别于普通三维空间中的曲面 , 称为超 曲面) 曲面)。
假定材料各向同性,则屈服条件为: 假定材料各向同性,则屈服条件为: f( σ 1 , σ 2 , σ 3)= C (3—2) ( ) f是σ 1 , σ 2 , σ 3 的对称函数(即三个主应力 的对称函数( 是 可以互换位置而函数值不变) 可以互换位置而函数值不变)。 的对称函数,所以, 而 I1 , I 2 , I 都是 σ 1 , σ 2 , σ 3 的对称函数,所以, 3 I 1 , I的对称形式的函 可以把屈服条件写成 2 , I3 屈服条件又可表示为: 数,即屈服条件又可表示为: ) f2( I1 , I 2 , I 3 )= C (3—3)
1 (σx+σy+σz)= 3
1 (σ1+σ2+σ3)=0 3
即 π平面上的任意点所代表的应力状 平面上的任意点所代表的应力状 其球张量为零, 态 其球张量为零 , 这个应力状态本身就是 一个偏张量。 一个偏张量。
2
(a)
' Oσ 2 其长度 同理, 同理 AB 在π平面上的方向平行于 平面上的方向平行于 ,
为:
2 A′B′ = σ 2 (b) 3 ' BP 在π平面上的方向平行于 Oσ 3,其长度为 其长度为:
ห้องสมุดไป่ตู้
§3.3 应力空间与屈服曲面
一、应力空间的概念
把六个应力分量看成六维空间的坐标, 把六个应力分量看成六维空间的坐标,则 每一应力状态就相当于六维空间中的一个点。 每一应力状态就相当于六维空间中的一个点 。 称这个六维空间为六维应力空间。 称这个六维空间为六维应力空间 。 屈服条件 ( 3—1)式就是六维应力空间中的一个超曲面 ) 为了区别于普通三维空间中的曲面, ( 为了区别于普通三维空间中的曲面 , 称为超 曲面) 曲面)。
假定材料各向同性,则屈服条件为: 假定材料各向同性,则屈服条件为: f( σ 1 , σ 2 , σ 3)= C (3—2) ( ) f是σ 1 , σ 2 , σ 3 的对称函数(即三个主应力 的对称函数( 是 可以互换位置而函数值不变) 可以互换位置而函数值不变)。 的对称函数,所以, 而 I1 , I 2 , I 都是 σ 1 , σ 2 , σ 3 的对称函数,所以, 3 I 1 , I的对称形式的函 可以把屈服条件写成 2 , I3 屈服条件又可表示为: 数,即屈服条件又可表示为: ) f2( I1 , I 2 , I 3 )= C (3—3)
1 (σx+σy+σz)= 3
1 (σ1+σ2+σ3)=0 3
即 π平面上的任意点所代表的应力状 平面上的任意点所代表的应力状 其球张量为零, 态 其球张量为零 , 这个应力状态本身就是 一个偏张量。 一个偏张量。
塑性力学03-塑性本构关系
3-2 广义Hooke定律 • 在弹性范围内, 广义Hooke定律可以表达为 1 ij 1 ij ij kk E 1 2 1 • 也可以表示为: ii ii eij Sij E 2G 由应力和应变的分解式,即 ij Sij ij m , ij eij ij m 代入上面广义Hooke定律的公式,考虑到 G E / 2 1 1 eij ij m 1 S ij ij m ij kk E 1 1 1 2 1 S 3 S ij m ij ij m ij m ij E 2G E 所以可以写成两个相应分解张量之间的关系. 我们来证明一下:
因为应力强度和应变强度的公式为:
3 i Sij Sij 2 2 i eij eij 3
把 eij Sij 代入上面右式并考虑上面左式得到
(3)应力强度是应变强度的强度函数 i i 线假定的硬化条件.
3 i 2 i , 即按单一曲
综上所述, 全量型塑性本构方程为 3 i 1 2 eij Sij i i ii ii 2 i E 注意的是上式只是描述了加载过程中的弹塑性变形规律. 加 载的标志是应力强度 i 成单调增长. i 下降时为卸载过 程, 它时服从增量Hooke定律.
1. Levy-Mises流动法则 这个理论认为应变增量主轴和应力 主轴重合, 应变增量分量与相应的应力偏量分量成比例, 即
d ij d Sij
d 0
式中的比例系数决定于质点的位置和荷载的水平. 这一理论是 Levy和Mises分别在1871年和1931年独立提出的, 所以被称为 Levy-Mises流动法则. 这个关系式不包括弹性变形部分, 所以 只适用刚塑性体. 2. Prandtl-Reuss流动法则 这个理论考虑了塑性状态变形中 的弹性变形部分, 并认为弹性变形服从广义Hooke定律; 而对 于塑性变形部分, 被认为塑性应变增量的主轴和应力偏量的主 轴重合. 即 1 e e deij deij deij dSij d Sij 这就是 2G Prandtl1 2 又由塑性不可压缩性, Reuss流 d ii d ii 体积变化式弹性的,有 E 动法则
材料力学第十四章
B1
r3 1 - 3 2 4 2
xB1
B1
M
2 m
ax
W2
4WMPn22
34
r3 1 - 3 2 4 2
r3
M
2 y
M
2 z
M
2 n
W
M
2 m
ax
W2
4WMPn22
M
2 y
M
2 z
M
2 n
W
r4
1 2
1 - 2 2
2
- 3 2
3
- 1 2
23 2
M
三、材料的破坏形式:⑴ 屈服; ⑵ 断裂 。 1、伽利略播下了第一强度理论的种子; 2、马里奥特关于变形过大引起破坏的论述,是第二强度理论的 萌芽; 3、杜奎特(C.Duguet)提出了最大剪应力理论;
4、麦克斯威尔最早提出了最大畸变能理论(maximum distortion energy theory);这是后来人们在他的书信出版后才知道的。
1
例
解: 拉剪应力状态时有:
x 2 0 xy -
根据应力分析有:
1 3
2
2 2
2
2 0
由第三强度理论: r3 1 - 3 2 4 2
由第四强度理论:
r4
1 2
1
- 2 2
2
- 3 2
3
-1 2
2 3 2
例 薄壁圆筒受最大内压时, 测得x=1.8810-4 y=7.3710-4, 用第三强度理论校核其强度 ( E = 210GPa, [] = 170MPa, = 0.3 )
如图示的承压薄壁圆筒,假定厚度为 ,平均直
径为:D
2021塑性力学塑性本构关系最新PPT资料

其中(1)和(3) 在第二章已经解决, 本章要解决第(2)点.
3-2 广义Hooke定律
• 在弹性范围内, 广义Hooke定律可以表达为
ቤተ መጻሕፍቲ ባይዱ
ij E 11ijijkk
• 也可以表示为: ii1 E 2 ii
1 eij 2G Sij
我们来证明一下:
由应力和应变的分解式,即 ij S ij ij m , ij e ij ijm
注意的是上式只是描述了加载过程中的弹塑性变形规律. 加
载的标志是应力强度 i 成单调增长. i 下降时为卸载过 程, 它时服从增量Hooke定律.
3-4 全量理论的基本方程及边值问题的提法
设在物体 V 内给定体力 F i , 在应力边界 S 上给定面
S : pi
力 p i, 在位移边界 S u 上给 定位移为 , 要求确定物 u 在小变形且简单加载的情况下i , 这两个理论是一致的.
(2)增量理论, 又称为流动理论, 它认为在塑性状态下是塑性应 变增量和应力及应力增量之间随关系.有Levy-Mises(莱维-米 泽斯)理论和Prandtl-Reuss(普朗特-罗伊斯)理论.
3-1 建立塑性本构关系的基本要素 Shield和Ziegler指出, 建立塑性本构关系需要考虑三个基本要素: (1)初始屈服条件;(2)流动法则;(3)加载条件.
ii1 E 2 ii
eij 2 1 G Sij
第二个式子是六个方程,但因为有 Sii 0 , 所以有5个是独立的. 从第二式可以看到在弹性范围内应力主轴和应变主轴是一致
的. 应变偏量的分量和相应的应力偏量的分量成正比.
第二式也可以写成 Sij 2Geij ,把它代入应力强度的表达式
就可以得到下面的第二式, 然后有 Gi /3i 再代回上面第
3-2 广义Hooke定律
• 在弹性范围内, 广义Hooke定律可以表达为
ቤተ መጻሕፍቲ ባይዱ
ij E 11ijijkk
• 也可以表示为: ii1 E 2 ii
1 eij 2G Sij
我们来证明一下:
由应力和应变的分解式,即 ij S ij ij m , ij e ij ijm
注意的是上式只是描述了加载过程中的弹塑性变形规律. 加
载的标志是应力强度 i 成单调增长. i 下降时为卸载过 程, 它时服从增量Hooke定律.
3-4 全量理论的基本方程及边值问题的提法
设在物体 V 内给定体力 F i , 在应力边界 S 上给定面
S : pi
力 p i, 在位移边界 S u 上给 定位移为 , 要求确定物 u 在小变形且简单加载的情况下i , 这两个理论是一致的.
(2)增量理论, 又称为流动理论, 它认为在塑性状态下是塑性应 变增量和应力及应力增量之间随关系.有Levy-Mises(莱维-米 泽斯)理论和Prandtl-Reuss(普朗特-罗伊斯)理论.
3-1 建立塑性本构关系的基本要素 Shield和Ziegler指出, 建立塑性本构关系需要考虑三个基本要素: (1)初始屈服条件;(2)流动法则;(3)加载条件.
ii1 E 2 ii
eij 2 1 G Sij
第二个式子是六个方程,但因为有 Sii 0 , 所以有5个是独立的. 从第二式可以看到在弹性范围内应力主轴和应变主轴是一致
的. 应变偏量的分量和相应的应力偏量的分量成正比.
第二式也可以写成 Sij 2Geij ,把它代入应力强度的表达式
就可以得到下面的第二式, 然后有 Gi /3i 再代回上面第
3.金属的塑性
生空隙和裂纹。
四.超塑性在金属加工方面的应用
超塑性有两个突出的优点:
1.塑性极好
2.变形抗力小
金属的流动性好,填充性好,设备吨位小,
对形状复杂、变形量大的零件可一次成形。
缺点:超塑性变形的温度较高,持续时间长, 设备、模具要有特殊的要求,材料保护、 润滑等较困难。
1.板料成形 英国某公司通过板料超塑性成形,用Zn22%Al合金制成小轿车外壳曾名盛一时。
③ 表面因素:用 Fk /V 表示,此值越大,受摩擦影响越
大,三向压应力越强,P值大
厚度越小, Fk /V 越大,塑性↑
大铸锭,表面质量↓,塑性↓
3. 周围介质的影响
①形成脆性相 Ni及其合金在含S煤气炉中加热,S被金属吸收生成 Ni3S2,它又与 Ni 形成低熔点共晶 (Ni3S2 –Ni 易产生裂纹。 ② 使金属表层腐蚀 625~
且晶界要平坦,易于变形流动。
空位移动是扩散型塑性变形不可 缺少的,晶界是空位的源和湮没 阱。
双相、稳定:超塑性变形通常在高温下进
行,变形速度很小,持续时
间很长,需要利用第二相的
存在来阻碍晶粒长大,稳定 材料的细晶粒组织。
在这些因素中,晶粒尺寸最重要,一般
d>10μm难于进行超塑变形。
超塑性变形后,材料具有下列组织特征: ① 变形后晶粒稍有长大,但仍为等轴晶,晶粒 未变形拉长。 ② 经过抛光的表面在变形后不会出现滑移线。 ③ 显微观察时,没有亚结构,也没有位错组织。 ④ 能见到显著的晶界滑动和晶粒回转的痕迹。
小结:
1.塑性的概念
塑性的指标 、 塑性图 2.影响塑性的因素 金属的自然性质 、 热力学条件 、 变形力学条件 提高塑性的途径 3.金属的超塑性 细晶超塑性:特征、机理、应用