大型船舶操纵性能特点概要
秦皇岛港大型船舶操纵
秦皇岛港大型船舶操纵随着船舶越来越明显的大型化趋势,到秦皇岛港超大型船舶比例在持续增加,对船长、引航员的操纵技能提出了越来越高的要求,掌握超大型船舶的操纵特点也成了船长、引航员的基本功。
由于超大型船舶的迅速发展,又由于它与一般船舶的操纵特点不同,特别是质量大、惯性大、操纵异常呆笨,在停止后启动很难,但一旦动起来又很难使其停下来;其航向稳定性与应舵性差,一旦操作不当酿成事故,将造成生命财产的巨大损失。
一般来讲,考虑到内海及沿海水深限制,超大型船舶吃水不会同比增加,但船宽和船长增加明显,尤其是船宽,对船舶的操纵性影响较大。
即方型系数大,所谓肥大型船舶,稳定性差,停船性能差,岸壁效应明显。
空载时受风的影响较大,满载时受流的影响较大,港内操纵中,控制超大型船舶的船首向和船速,包括加减速、制动、旋回、横向运动等许多任务必须靠多艘拖轮协助才能完成,而极少靠本船自身动车、抛锚来操船。
除非特殊情况,尽量不使用本身倒车,因为慢速驶近泊位时,频繁用倒车容易使船首偏转加剧,无法摆正船位,使操纵更加困难。
航向稳定性差,旋回滞距较大,维持舵效就需要较高的速度,一般船舶为2节,超大型船舶为3.2节。
停车冲程一般为8~23L,超大型为23L;倒车冲程万吨级为6~8L,超大型为13~16L。
这就存在一对矛盾,超大型船舶为维持舵效需要较高的余速,但它的惯性大,冲程大,重载靠泊时不易控制。
同时,船舶在航道内、海底沿其船宽方向有明显的倾斜时,船首转向深水,同时船舶向浅水侧靠近,即岸壁效应,也需要较高的速度保持船位。
当然,靠泊时提高船速的目的主要是为提高舵速,舵速=船速-舵处的伴流速度+螺旋桨排出流速度,所以在航道内停车淌航,船速降低后,突然加大主机转速是提高舵效的有效途径,因为减小了旋回滞距,并增大了舵速。
既能控制余速,又能提高舵效。
另外还应特别注意紧急情况下操舵旋回舵效的迟钝性,也就是说,从下达舵令至应舵时间内,它不象一般船那样按舵令要求立刻旋回,而是要要经过一段时间之后前冲一段距离才开始旋回。
船员大型船舶操纵特殊培训课件

THANKS
感谢观看
船员大型船舶操纵理论知识
03
培训
航海学基础知识
航海学概述
航海学是研究海洋航行、船舶导航和 海洋学的综合性学科,旨在培养船员
掌握船舶航行的基础知识和技能。
无线电导航
无线电导航是利用无线电信号,如 GPS、GLONASS、Galileo等全球定 位系统,进行高精度定位和导航的方
法。
天文航海
天文航海是根据天体位置和运动规律, 通过观测太阳、月亮、行星等天体位 置,推算船位和航向的方法。
船员大型船舶操纵特殊培训
05
评估与改进
培训效果评估
评估标准制定
根据培训目标和内容,制 定合理的评估标准,确保 评估结果客观、公正。
培训过程监控
对培训过程进行实时监控, 及时发现和解决存在的问 题,确保培训质量。
培训效果评估方法
采用多种评估方法,如考 试、实操考核、学员反馈 等,全面评估培训效果。
船员大型船舶操纵特 殊培训课件
目录
• 大型船舶操纵概述 • 船员大型船舶操纵技能培训 • 船员大型船舶操纵理论知识培训 • 船员大型船舶操纵实践操作培训 • 船员大型船舶操纵特殊培训评估与
改进
01
大型船舶操纵概述
大型船舶的定义与特点
01 大型船舶定义
通常是指船长超过100米,载重吨位超过1万吨的 船舶。
气象预报与警报
海洋气象观测与仪器
船员需要掌握气象预报和警报的获取方法 ,了解不同气象条件下的航行建议和限制 ,以保障航行安全。
了解海洋气象观测的基本方法和常用仪器 ,如风速风向仪、海浪仪等,有助于船员 更好地观测和记录气象数据。
浅谈大型船舶浅水操纵性能特性

摘
要 :大 型 船 舶 操 纵 性 能 与 航 行 区 域 的水 深 有 密 切 联 系 。 当大 型船 舶在 浅水 航行 的 时 候 ,会 产 生 浅 水 效 应 。船 舶
的操 纵 性 能 会 变 差 。随 着 经 济 社 会 的 发 展 ,人 们 对 大 型 船 舶 的操 纵 性 能 关注 度 越 来 越 高 ,尤 其 是 对 于 大 型 船 舶 在 浅 水 中 能 否 安 全 航 行 ,尤 为 重 视 。在 人 们 对 大 型船 舶 的 要 求越 来越 高 的 背景 下 ,加 强对 大 型 船 舶 浅 水 操 纵 性 能 的研 究 , 解 决 关键 问 题 是 船 舶 企 业 未 来 发 展 的必 然 选 择 ,文 中将 结合 浅 水 区 域 的评 判 标 准 来 探 讨 大 型船 舶 的操 纵 性 能 。 关键 词 : 大 型 船 舶 ;浅 水 ;操 纵 性 能 ;特 性 ;措 施 ;注 意 事 项 中图分类号:U 6 6 1 文献 标 识 码 :A 文章编号 :1 0 0 6 - 7 9 7 3( 2 0 1 3 )1 1 - 0 0 0 5 - 0 2 1 . 附力 口 质 量 与 附加 矩 衣 辑 增 加 当 大 型 船 舶 在 浅 水 区域 航 行 过 程 中 其 自身 的质 量 会 有 所 增 加 。 这 主 要 是 由于 大 型 船 舶 在 航 行 过 程 中 带 动 周 围 的水 一
化剧烈 , 船体 中部低压 向船 中转移 ,最终导致船体 出现下沉 。 船体下沉与相对水深 有很紧密的联系 。据笔者深 入分析 ,发
现 两 者 是 一 种 反 比例 关 系 ,即 当 相 对 水 深 越 深 的 时候 ,它 的
大型船舶操纵与避碰技术

3。方形系数Cb 大 大型船舶另一个船型参数Cb 较一般货船有明显的增大趋势。大型油船 的Cb 一般在0. 8以上。由于Cb 的增大,使船舶首摇的阻尼减小,因此,大 型船舶的旋回性能比Cb 小的船舶要好一些,但航向稳定性相对差一些。
3.系泊用缆
为了保证大型船舶的系泊安全,系泊用缆应 为高强度的尼龙缆或钢丝缆。码头或船墩 系泊时,通常用头缆、尾缆、前后倒缆以及 前后横缆各4 ~8 条,组合起来,全部共用到20 条以上。
单点系泊时,如波浪很小最适合的系缆长度 是水面至导缆孔高度的1. 5 倍左右,当波浪 较明显时,则以松得稍长些为好。
4.单位载重吨分配的主机功率小 从船舶的主机装置来看,与一般货船比较,大型船舶单 位载重吨分配的主机功率(PS/DW)要小得多了。一般 大型船舶的PS/ DW 为0. 25 以下,这就造成大型船舶 的紧急停船性能较一般货船差很多。因此,对于紧急 停船距离,不论是绝对值,还是相对值都比一般货船 大很多。启动距离较一般船舶也大得多。
三、大型船舶港内操纵特点及其注 意事项
1.系泊方式
大型船舶吨位大,吃水也大,为了满足泊位对 水深的要求,大型船舶系泊分为码头系泊、 船墩系泊、单点系泊和多点系泊等。
2.开敞式泊位
为了满足大型船舶吃水对水深的要求,大多 数大型船舶的泊位位于远离陆地的开敞水 域,船舶停泊过程中受流及风浪的影响大。 因此,在大的风浪来临前,应根据泊位的波稳 情况决定船舶的防风措施,如在泊位避风应 增加系缆和加强值班。
大型船舶操纵性能特点概要

大型船舶操纵性能特点概要由于超大型船舶的尺度和载重量极大而主机相对单位吨位所具有的马力反而变小,从而使超大型船舶与一般1 –2 万吨级船舶在操纵性能上具有了很多需要注意的不同特点。
一.操纵性能下降1.舵效差,反应迟钝,甚至3 – 4 节船速时已无舵效;2.追随性差,故在改向或过弯曲航道时,需予以充分估计,及时施舵;3.航向稳定性(方向稳定性)差,施舵后,一旦船首开始偏转则需注意及时压舵驶上新航向;4.保向性能差,在风浪中航行因B/L.D值较高,易产生偏航;5.旋回性相对好,虽旋回圈较大,但其D/L值较低,呈良好旋回性能;6.启动,停车惯性大,呈显出变速操纵较为呆笨,停船性能较差;7.转向惯性大,故需施大舵角,早施舵,早回舵,施大压舵角;8.紧急停船性能下降(停车惯性大)。
二.浅水,狭水道中受限水域中产生的效应更为明显1.阻力增大,船速下降;2.船体下坐,产生纵倾;3.旋回性变差;4.振动加剧,产生异常振动;5.舵力产生变化;6.航向稳定性提高;7.因纵倾与横摇,要求足够的富裕水深;8.沿岸航行,易产生侧壁效应;9.因风,流压差,要求足够的海底宽度;10.追越与对驶时,保持必要间距,以防船吸效应。
三.港内操船特点1.由于港口码头水域有限,超大型船舶的操纵港作拖轮是主力;2.靠离码头,横向移动需要使用多艘拖轮;3.所配拖轮位置应据不同作业状态而应有所不同;4.回转中需注意本船船尾的反移量。
四.操纵用锚上的受限1.锚泊时,几乎都是抛单锚锚泊;2.如抛锚调头等操纵用锚时,应倍加注意,因锚机制动力不足,船速必须小于1/4节,否则有危险;3.因船舶动量特大,一般不可应用锚来制动,最忌违的是航行中下锚;4.一般均采用深水抛锚法,用锚机倒至海底,松出一定长度锚链后,再用常规方法松链。
超大型船舶的船型均肥胖而粗短,其方型系数多高于0.8,船越大C B亦越大,即是压载时C B也可达0.75以上,其长度比L/B为6.0 – 6.7,比一般货船小,而宽与吃水之比多大于2.5,比一般货船大,其舵面积比A/Lpp * d多低于1/65,但却具有良好的旋回性,从而使得超大型船舶的追随性和航向稳定性能较差,而旋回性能较好,主机功率随船型的增大而增大,但并不与其吨位成比例,其单位吨位马力值有较大降低,且其全速倒车速度也仅能达到全速前进时的30%左右,一般均在6节以下。
大型集装箱船的结构特点及其操纵分析2
大型集装箱船的结构特点及其操纵分析[摘要]大型集装箱船是远洋货物运输重要的运载工具,对其操纵性能的了解直接关系到运输效率及航行安全。
本文根据一些前人资料结合笔者自己所学的知识简要的介绍了集装箱船的历史及通过对大型集装箱船的船型、侧推器、风压力、旋回性、加速、减速及停船性能的分析,并在船型、风压力和旋回性上与大型油船、散货船进行比较,总结出大型集装箱船具有旋回性较差、舵力和舵力转船力矩较大、风压差较大、船速较高、倒车停船性能较好等操纵特点。
根据这些特点,在进出港的操纵过程中,为了减小下风漂移,可适当提高船速,在接近码头过程中适时进行倒车减速或用拖船协助减速。
实践表明,这些策略对实际操纵具有指导意义。
可以为在集装箱船上工作的海员们提供一些专业性的参考。
[关键字]集装箱船结构特点操纵性航行安全Large container ship’s structural characteristics and analysis of itsmanipulation[Abstract] Large ocean-going cargo container ship is an important means of delivery, understanding its maneuverability is directly related to transport efficiency and safety of navigation. Information according to some combination of the previous paper the author learned in his brief introduction to the history of container ships and large container ship by ship, tunnel thrusters, wind pressure, gyration, acceleration, deceleration and stopping performance analysis, and In the ship, the wind pressure and the gyration with large oil tankers, bulk carriers were compared, summed up the large container ships with a cycle of poor rudder force and moment of a larger rudder, turned the ship, the wind pressure greater, speed high, reversing stopping manipulation features such as better performance. According to these characteristics, manipulation of the process in and out of port, in order to reduce downwind drift, it is appropriate to improve the speed of the ship, near the Pier during the slowing down or reversing a timely manner to assist with the tug to slow down. Practice shows that these strategies provide guiding significance for the actual manipulation of ship. And it could provide some professional reference for the seafarers working on container ship.[Key words] container ship structural features maneuverability Navigation Safety目录引言 (5)第一章集装箱船概论 (6)1.1集装箱船大型化的发展历程 (6)1.2 大型集装箱船的市场介绍 (6)第二章大型集装箱船的结构分析 (8)2.1 大型集装箱船的船型特点及其对船舶操纵性能的影响 (8)2.1.1长宽比 (8)2.1.2方形系数 (8)2.1.3舵面积与船长吃水比 (8)2.1.4单位载重吨分配的主机功率 (9)2.2 大型集装箱船的侧推器 (10)2.3大型集装箱船的风压力 (10)第三章大型集装箱船的操纵性 (12)3.1 旋回性 (12)3.1.1旋回圈几何要素 (12)3.1.2 旋回过程中的速度降低和旋回时间 (13)3.2大型集装箱船的加速、减速和停船性能 (13)第四章大型集装箱船的一些安全操作 (15)4.1用好先进的导航设备 (15)4.2 采用车速避让时需大幅度 (16)4.3熟悉船舶的操纵数据应用在实践中 (16)4.4 大风浪中的注意事项 (16)4.5 抵港前根据船舶密度适时调整船速 (17)4.6 对小渔船的避让 (17)4.7 把握船舶驾驶员的避碰心理 (18)结论 (19)致谢辞 (20)参考文献 (21)引言集装箱船舶首次出现于20世纪50年代,此后国际海上集装箱运输曾经历几代的发展。
11 超大型船舶的操纵性及靠泊秦皇岛港操纵要点
超大型船舶的操纵性及靠泊秦皇岛港操纵要点秦皇岛港引航站李海龙1 超大型船舶的操纵性随着船舶大型化的趋势,到秦皇岛港超大型船舶的比例在持续增加,对引航员的操纵技能提出了越来越高的要求。
由于超大型船舶质量大、惯性大,与一般船舶相比有其不同的操纵特点:(1)航向稳定性差。
考虑到内海及沿海水深限制,超大型船舶的吃水一般不会同比增加.但船宽和船长增加明显,尤其是船宽,即方型系数大。
所谓肥大型船舶,对船舶的操纵性影响较大。
超大型船舶航向稳定性差,停船性能差。
空载时受风的影响较大,满载时受流的影响较大。
港内操纵中,控制超大型船舶的船首向和船速,包括加减速、制动、旋回、横向运动等许多任务需要靠拖轮协助才能完成。
除非特殊情况,尽量不使用本身倒车,因为慢速驶近泊位时,频繁用倒车容易使船首偏转加剧,无法摆正船位,使操纵更加困难。
航向稳定性差,旋回滞距较大,维持舵效就需要较高的速度.一般船舶为2 kn,超大型船舶为3~4 kn;停车冲程一般船舶为8~23 L,超大型船舶为23 L:倒车冲程万吨级为6~8L,超大型船舶为13~16L。
这就在操纵上存在一对矛盾,超大型船舶为维持舵效需要较高的余速,但它的惯性大、冲程大.重载靠泊时不易控制。
(2)应舵性差。
在港内短时用车提高船速的目的主要是为提高舵速。
舵速=船速一舵处的伴流速度+螺旋桨排出流速度。
所以在航道内停车淌航,船速降低后,突然加大主机转速是提高舵效的有效途径.既能控制余速,又能提高舵效。
另外还应特别注意紧急情况下操舵旋回舵效的迟钝性,也就是说,从下达舵令至应舵时间内,需要前冲一段距离才开始旋回,这主要与舵面积比有关。
超大型船舶的舵面积比较小.在l,65~1/80.而一般船舶约在l/60以上。
因此,在操纵超大型船舶时,就应充分考虑到这种惯性大、舵效迟钝、制动马力小的特征。
在允许的情况下,在船尾安排一艘拖轮减速是解决上述矛盾的好方法。
(3)超大型船舶的每排水量分配的主机功率较小。
船员大型船舶操纵特殊培训讲义

六、大型船舶的系泊属具
锚 重 达 1 5 - 2 0 吨 、 锚 链 一 般 为 100*700(m/m)左右,许多船配备 了15-20根的系缆。
第二节、大型船舶的
操纵性
一、操纵性的表达方式及K、T 指数的意义
力不足,船速应控制在 0.25-0.5节 以下。 3. 航行中一般不用锚来制动 4. 锚泊作业时一般均采用深水抛锚法
五、大型船舶的主要尺度
第五代集装箱船的L、B、D分别为: 280、39.8、23.6米.
大多数超大型油轮,矿/油,矿/散船舶的 L,B,D都在:300,45,24米以上. 船长为300 米左右的船舶的满载与空载盲区分别达: 500米和600米左右。
式中:旋回初速V的单位为m/s;操舵时间 单位为s;舵角δ的单位为弧度;转向角 ф单位为度,DNC的单位为m。
一、大型船舶航向稳定性
1.航向稳定性的概念(图示2)
1)静航向稳定性:正舵直航的船受 瞬间外力作用后其漂角是否变大的 性能为静航向稳定性。船舶通常不 具有静航向稳定性。
2)动航向稳定性:正舵直航的船受 瞬间外力作用后,外力消失后能否 尽快地稳定在新航向上的能力。T大 于零且小,动航向稳定性好。
1. 试验的方法(图示5)
1)试验船把定航向后,做右(左)10度舵角, 并保持该舵角;
2)船从原航向向右(左)转头达10度时,操左 (右)10度舵角,并保持该舵角;
3)其后船停止向右(左)转头而开始向左(右) 转头,经原航向后并一步转头达左(右)10度, 再次操右(左)10度,并保持该舵角;
14、有些事情是不能等待的。假如你必须战斗或者在市场上取得最有利的地位,你就不能不冲锋、奔跑和大步行进。2021年10月21日星期四上午7时26分5秒07:26:0521.10.21
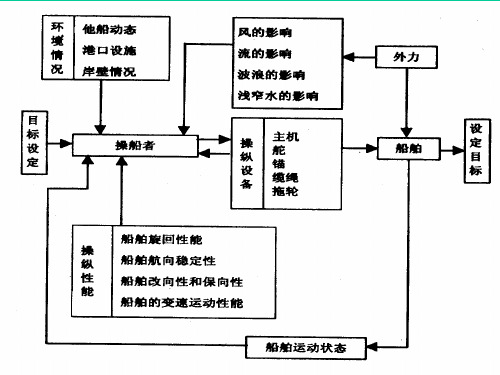
船舶的操纵性能
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
船舶的操纵性能
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
船舶操纵性
固定坐标系中船舶六自由度操纵运动方程:
. m(u . vr wq ) X H X R X P X 1W X 2W m(v ur pw) YH YR YP Y1W Y2W . m( w uq vp) Z H Z P Z1W Z 2W . I xx p K H K R K P K1W K 2W . I yy q ( I xx I zz ) pr M H M P M 1W M 2W . I zz r ( I yy I xx ) pq N H N R N P N1W N 2W
回转直径:
D
2U 0 2U 0 r K r
k为舵效系数
L2 d 最小回转直径: D 10 AR
2) 战术直径 DT
船舶首向改变180度时,其重心距初始直线航线的横向距离
4) 正横距 l B
转舵开始点到首向角改变90度时重心横移 的距离
DT (0.9 ~ 1.2) D
3) 进距 l A
Cw 为水线面系数
桨力
桨推力减额系数: 推力系数:
进速系数:
(汉克歇尔公式估算)
舵力
(1)
tR
为舵阻力减额系数
(2) 舵的正压力: a) f 的计算:
f a 为舵的法向力系数, 为舵的展弦比 ,
(芳村模型) (船舶机动时舵处的伴流系数)
2 b)U R (有效来流速度)的计算:
v为船舶瞬时速度,
非线性流体动力:
为展弦比,
3)转船流体动力 采用井上模型:
a) b) c)
d) e)
f)
为首尾吃水差
4)横摇流体动力矩
浅析大型船舶浅水区域操纵性能特性
浅析大型船舶浅水区域操纵性能特性由于潜水区域的局限性,会对大型船舶的行驶造成一定的影响,即产生俗称的“浅水效应”。
然而,随着时代的进步,经济的发展,我们大型船舶由于需要又不得不在浅水区行驶,对大型船舶在浅水区的安全和效率要求越来越高,因此研究浅水的操作性能迫在眉睫。
文章通过对船舶在浅水区行驶时遇到的问题,以及需要注意的问题做出研究,对船舶自身的材质和形状提出了一些建议,从而为提高安全性能提供一些参考和借鉴。
标签:大型船舶;浅水区域;操纵性能随着社会经济的飞速发展,对于地区的产品外销以及我国商品的出口要求也相应提高,对于空、地方面的要求基本上满足了目前的需要,且形成了一个比较正规的体系,且各方面也达到了很好的要求。
对于海路,产品的运输主要依靠的是大型船舶,由于港口设置在浅水区域,那么,船舶在浅水区域行驶的问题也就突显了出来。
大型船舶的体型比较大,质量也特别大,在行驶过程中对于浅水区的水位会造成一定影响,同时由于水浅,海底不平等原因,随时都有可能面临搁浅等一系列问题。
浅水效应就是当船舶进入浅水区后,对于船体的操作和控制性就会变差,船速会急速的下降下来,同时螺旋桨也必须缓慢旋转,否则高度的涡流会严重损害浅水区的生态环境。
对于停泊时速度和位置要求的非常准确,因为进出港口的船只很多,密度大,这样就极有可能出现碰撞,对船体造成破坏。
这样对船体本身的设备要求非常高,对驾驶员的能力,船只整体的敏捷性能,应对突发情况的要求提高。
要想提高大型船舶在浅水区的性能,需要综合考虑多方面的因素,进而确保安全和效率。
1 对浅水区的分析1.1 浅水区的概念对于浅水区,我们是根据船舶来确定的,不同的船舶,浅水区是不同的。
我们判断的标准主要是船舶的相对水深,船舶的下降水深就是船舶的吃水多少,吃水多少相对于水深就称作相对水深,相对水深对船舶的航行会造成很大的影响,只有相对水深较大,船舶才不会搁浅,才不会面临各种危险。
对于浅水区的判断标准主要是从航行阻力、横向阻力以及操纵性能的角度来确定[1]。
超大型船舶的操纵特点

锚泊操纵
走锚
走锚的判断 应急措施
按国际信号规则规定,及时悬挂并鸣放“Y”信号, 并用VHF等通信手段警告附近他船;
报告船长,同时通知机舱备车; 及时加抛另一首锚并使之受力; 在查明用无妨碍时,可用车抵抗外力以减轻锚链受力,
防止船舶继续走锚; 如开车仍不能阻止走锚,则就果断决策,起锚另择锚
线型尺度大,浅水效应和岸壁效应均较突出 ;
由于水线上下面积的加大,受风、流影响较 大;
航向稳定性差; 淌航中丧失舵效的时间出现得较早。
本节要点
锚泊操纵
锚地的选择 锚泊方式 抛锚操纵 锚泊偏荡 走锚及其防止
靠离泊操纵
靠离泊操纵要领 超大型船舶的操纵特点
靠离泊操纵
离泊操纵
准备工作 实地观察风、流及泊位前后情况,前后有无动车 余量、锚链方向及长度,系缆的角度及受力状态, 以及水域内来往船舶的动态 制定离泊方案,如有拖轮协助,应交待协助操纵 方案,以便使其主动配合 机舱活车,驾驶员应到船尾察看系缆及推进器附 近是否清爽 备车后单绑
本节主要内容
港内操船
进出港时操船 锚泊操纵 港内掉头 靠、离泊操纵
进出港时操船
进港时船速控制
海上船速(sea speed)改换为备车速度或操纵速度 (manoeuvring speed)。
做好进港、停泊和装卸作业的准备工作。
逐级减速
距离 车令
5ˊ 备车
4ˊ 进二
地或也海滞航。
港内掉头
常用掉头方法
顺流抛锚调头 合适的流速;1~1.5kn为宜 足够的掉头水域; 右旋FPP单桨船一般宜采用向右掉头; 横风时宜采取迎风掉头; 弯曲水道应向凸岸一边掉头; 控制余速; 抛锚时机,船身约与流向成30度角; 控制船身,转至横流时,进车、右舵; 起锚。
大型船舶操纵
六、航行中船体下沉与纵倾变 化
• 七、船体的左右不对称力和力矩
• 第二节 操船和航道条件
• 一、富余水深
• 1富余水深考虑的因素 1)首沉量 2) 垂荡时的吃水增量 3)图标水深精度 水深范围:20m以下;允许误差0.3m · 水深范围;20~100m;允许误差1.0m 4)其他方面 (1)气压,每升高1 hPa,水面下降1 cm。 (2)潮高变化时,应按实际潮位计算。 (3)海水密度的变化。 5)主机冷却水进口。
• 可直接用来比较不同船舶或同一船舶在不同条件 下的操纵性优劣及其变化趋势;反过来说,当两 船的K、了指数相等时,要使其操纵性能也相同, 其 船 长 和 船 速 也 应 相 同 。 ( K,T 相 等 , 比 较 K’,T’;K’,T’相等,比较K,T)
• K大旋回性好
• T小稳定性好
第五节 船舶操纵性试验
• 三、螺旋试验
• 螺旋试验包括正螺旋试验和逆螺旋试验两种, 螺旋试验的目的是判定船舶航向稳定性的好坏。
• 正螺旋试验是指求取船舶操某一舵角时船舶所 能够达到的定常旋回角速度的试验方法。
• r一δ在环形范围内具有多值对应关系,则说明该 类船舶在环形范围内不具备航向稳定性。
• 大型船舶的环形的舵角范围宽度大于200时,操 纵就感到困难。
Xw=9.81/2 σwCnwL2dV2w
• 四、风致偏转
• 1风致偏转的情况有二种:仰风;顺风
• 2风力作用中心A,船舶重心G,水动力作用中心 W三者的位置关系
强风中操船的保向界限
• 第二节 大风浪中操纵 • X轴——纵荡和横摇 • y轴——横荡和纵摇. • Z轴——垂荡(heaving)和首摇(yawing) • 横摇 • 1)横摇摆幅
大型集装箱船舶的操纵体会

大型集装箱船舶的操纵体会1,大型集装箱船舶的操纵体会唐菊良随着科学技术的不断提高及海运市场的需要,现在的船舶越造越大,设备越来越好,船速也越来越快,特别是对集装箱船舶而言,更是如此,现就本人近年来在大型集装箱船舶担任船长的一些船舶操纵体会和航海同仁一起探讨。
一、提速和减速大型集装箱船舶一般都有强大的主机功率,在最小允许用车(微速进或极慢车)的情况下,也有7~8 节的速度,有些船可达9节,前进一的静水速度12~13节,前进二有15节左右。
而船舶从静态状况下开始用车,假如在5分钟内开到前进二,那么,船将在10分钟内达到10节以上的速度,如果在10分钟开到前进三,那么船约在15分钟达到其前进三的速度(我轮为19.5节)。
因此,对船长来说,了解和掌握本船的操纵特性非常重要,也就能安全地,灵活地操纵船舶。
1.提速在船舶离泊或起锚后,一般先用微速或前进一航行,待船进入航道或计划航线后再视情况逐渐加到一定的速度——安全航速。
但为减少因横风、横流对船舶横移的影响,要提前使船舶达到一定的速度。
另外,有引航操纵时,引航员一般都会在很短的时间内开到前进二、前进三。
此时有必要提醒引航员主机功况和船舶速度。
2.减速大型集装箱船的海上速度一般都在25节左右,在抵港前的减速,我的体会是提前备车,使主机从定速降到可随时操纵状态(一般需20分钟),然后在宽敞水域进行主机正倒车、舵机的操舵试验,确认操纵系统无误后再驶向引航站或锚地,根据其距离和时间控制船速。
引航员登轮时,送引航员的小艇速度一般在7节左右,如距离引航员登轮点有3海里而此时的船速约15节时,此时因马上开微速进,这样在抵引航登轮点的船速就在7~8节;如为赶时间,快车驶向引航员登轮点,在相应的减车后未能降到引航员登轮速度时,用舵减速是非常有效的方法。
而进入锚地时的船速也应控制在7~8节较为妥当。
当然,还应视当时的水流和风的情况做适当的调整。
二、抛锚作业对于锚地的水深、底质、避风条件等是船长在抛锚前需了解的基本条件,而每位船长在抛锚前都想有一个适合本轮抛锚的最佳锚位,但实际上几乎不可能,因为港外锚地都是由港口当局指定的,加上船舶的密集度,因此,锚位不容船长自己挑选,只得在指定的锚位抛锚。
超大型船舶的操纵探讨
超大型船舶操纵特点与操作技巧探讨国际航线干散货轮一般分为以下四种类型:好望角型(10万载重吨以上)、巴拿马型(7-9万载重吨)、大灵便型(4-5万载重吨)和灵便型(2-4万载重吨)。
《长江江苏段船舶定线制》规定超大型船舶为:实际淡吃水9.7米以上的;船长205米以上的;总长305米以上的拖带船队或总宽65米以上的船队(小型吊拖船队除外);水面以上最大高度达到或超过拟通过的桥梁、过江电缆等水上跨江架空设施的设计通航净空高度的。
与普通船舶相比,超大型船舶主要呈现出6个操纵特点,具体说就是“三下降、三增大”:三下降:操纵性能的下降、提速及停船性能的下降、锚的作用下降。
三增大:限制水域的影响增大、低速航行时的风流影响增大、港内船舶操纵中对拖轮的依赖增大。
一、操纵性能下降操纵性能就是船舶对驾引人员实施操纵的相应能力。
我们说一条船的船舶操纵性能好就是船舶对驾引人员实施操纵的响应能力好,一方面可以方便稳定的保持运动状态,另一方面又可以迅速准确地改变运动状态。
具体可以用“追随性”(T,时间常数)、“旋回性”(K,增益常数)、“航向稳定性”这三个指标来表示。
从操纵性能来看,超大型船舶的K、T值都较大,也就是旋回性较好,追随性和航向稳定性差。
因此超大型船舶在实际操纵中要特别注意用舵,一般用舵时,起始至少20度,把定时也用大舵角,甚至经常用满舵压,否则压不住。
在船舶避让时,这一点是非常不利的,因为用舵时船舶反应很慢,而一旦转起来又很难让它停下来,因此,超大型船舶在用舵避让时,都是非常慎重的,除非会遇态势很明了,否则轻易不用舵。
二、提速及停车性能下降超大型船舶的排水量巨大,而出于经济效率考虑,超大型船舶的主机马力并不与排水量同比增长。
对超大型船舶而言,一单位主机马力的力需要推动10吨左右的物体,而对集装箱船舶而言,一单位主机马力的力只需推动1.4吨的物体就可以了,如下表所示,两者相差6—7倍。
表不同船舶排水量和主机马力对比船名排水量主机马力吨/马力XIN HUANGPU(集装6993049633 1.41箱船)AIGAION(矿船)197870229208.62 YOUNARA GLORY(油3731373600010.4船)另外,超大型船舶的船体肥大,由于摩擦作用,带动周围的流体一起运动,形成巨大的“虚质量”,这也使得主机改变超大型船舶运动状态的能力大打折扣。
大型集装箱船舶的结构特点及操纵性能
并设计了一套污水管路 , 可以将各大舱的污水抽到 污水收 集舱 内。那 么是 不 是下 雨 会有 大 量 的水 流进 大
,
盲区等。并总结说 : 船长应充分地考虑气象 、 季节和航
线的情况 ,在全部 的航程 中选择一个最佳 的吃水和吃 水差来满足上述各项要求 , 以达到安全适航的 目的 。
上 海远 洋运输公 司 宋尚福
集装箱船舶 的大型化所带来 的经济效益是非常显 著的。据介绍 , 一艘 50T U 的集装箱船的收入和效 00 E 益超过 5 艘万吨轮 。因此 , 0 各大公司竞相在主干线上 投人大型集装箱船。 随着船舶尺度吨位的大型化 , 大型 至二层高 , 5 0 共 0 只冷箱插座 , 分布在甲板过道上 。 () 2 甲板上装箱层数如下 :A 10 可装 4 B Y0 /3 层高 , 从 B Y 5 到 B Y1 装 5 高 ,从 B Y2 到 A O起 A 9可 层 A 1 B Y5 A 3 起可装至 6 层高 ,B Y3 A 7到 B Y6 可装至 7 A 4 层高 , 7 第 层高两舷最外一个不能装 。 内可以装 9 舱 层 高集装箱 , 以装一层 96 高的箱子 , 可 ’” 大舱 内 2 尺 、0 0 4 尺箱可以混装 , 根据绑扎手册的要求 , 舱内 2 尺箱子 0
TE U,舱 内 为 2 6 EU。 甲 板 2 6 4T 0尺 最 大 装 载 量 为 23 92只加 10只 4 1 0尺 ; 甲板 4 最 大装 载量 为 14 0尺 54 只加 4 8只 2 0尺 ;舱 内 2 最 大装 载 量 为 10 0尺 7 0只加 4 2只 4 8 0尺 ; 内 4 最 大装 载量 为 10 舱 0尺 38只加 4 8只
同以往的集装箱船相比, 它有两个不 同的特点。 () 1干舷。本船的干舷对应的位置在 内走道 , 而不 是在上甲板附近 。干舷标 志在 C S O 的 S OC 字母 中间 位置 。符合 16 年国际载重线公约及 18 年议定书 96 98 的要 求 。 因此 , 对干 舷 以下 的水 密 门 、 门 , 航 行 中保 道 有
关于CAPE SIZE超大型船舶的操纵
关于CAPE SIZE超大型船舶的操纵超大型船舶指总吨位超过10万总吨的船舶,一般用于运输石油、矿砂。
超大型船舶具有排水量大;惯性大;停船性能较差;追随性差;舵对船舶航向的控制能力较低等特点。
操船者必须充分了解和掌握它的特点之后,才能安全地操纵超大型船舶,笔者曾在两艘近17万总吨的CAPE SIZE超大型船舶“港明”轮和“港星”轮任船长,下面从实操方面谈谈关于CAPE SIZE超大型船舶操纵的体会。
一、进出港和经狭水道的操纵1、正确掌握转向的提前量和所用舵角。
a. 低速(7-10节)转向角度大(大于90度),满载情况下,用满舵角,用舵时机在离转向点0.6-0.8海里;空载时,舵角可减小5度。
b. 低速(7-10节)转向角度比较大(60-90度),满载情况下,用20度舵角,用舵时机在离转向点0.6-0.8海里;经大角度转向后,船速会下降,(一般超大型船舶转过90度后,船速下降4节左右),所以当大角度转向船速下降时,可适当加大舵角以增加舵效。
空载时,舵角可减小5度。
c. 低速(7-10节)转向角度小(30-60度),满载情况下,用15度舵角,用舵时机在离转向点0.5海里,空载时,舵角可减小5度。
d. 低速(7-10节)转向角度小(小于30度),满载情况下,用10度舵角,用舵时机在离转向点0.5海里;空载时和满载情况下一样。
e. 常速(10节以上)转向角度大(大于90度),满载情况下,用20度舵角,用舵时机在离转向点0.6-0.8海里;空载时,舵角可减小5度。
f. 常速(10节以上)转向角度比较大(在60-90度),满载情况下,用20度舵角,用舵时机在离转向点0.5海里;空载时,舵角可减小5度。
g. 常速(10节以上)转向角度小(30-60度),满载情况下,用15度舵角,用舵时机在离转向点0.5海里;空载时,舵角可减小5度。
h. 常速(10节以上)转向角度小(小于30度),满载情况下,用10度舵角,用舵时机在离转向点0.5海里;空载时和满载情况下一样。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大型船舶操纵性能特点概要由于超大型船舶的尺度和载重量极大而主机相对单位吨位所具有的马力反而变小,从而使超大型船舶与一般1 –2 万吨级船舶在操纵性能上具有了很多需要注意的不同特点。
一.操纵性能下降1.舵效差,反应迟钝,甚至3 – 4 节船速时已无舵效;2.追随性差,故在改向或过弯曲航道时,需予以充分估计,及时施舵;3.航向稳定性(方向稳定性)差,施舵后,一旦船首开始偏转则需注意及时压舵驶上新航向;4.保向性能差,在风浪中航行因B/L.D值较高,易产生偏航;5.旋回性相对好,虽旋回圈较大,但其D/L值较低,呈良好旋回性能;6.启动,停车惯性大,呈显出变速操纵较为呆笨,停船性能较差;7.转向惯性大,故需施大舵角,早施舵,早回舵,施大压舵角;8.紧急停船性能下降(停车惯性大)。
二.浅水,狭水道中受限水域中产生的效应更为明显1.阻力增大,船速下降;2.船体下坐,产生纵倾;3.旋回性变差;4.振动加剧,产生异常振动;5.舵力产生变化;6.航向稳定性提高;7.因纵倾与横摇,要求足够的富裕水深;8.沿岸航行,易产生侧壁效应;9.因风,流压差,要求足够的海底宽度;10.追越与对驶时,保持必要间距,以防船吸效应。
三.港内操船特点1.由于港口码头水域有限,超大型船舶的操纵港作拖轮是主力;2.靠离码头,横向移动需要使用多艘拖轮;3.所配拖轮位置应据不同作业状态而应有所不同;4.回转中需注意本船船尾的反移量。
四.操纵用锚上的受限1.锚泊时,几乎都是抛单锚锚泊;2.如抛锚调头等操纵用锚时,应倍加注意,因锚机制动力不足,船速必须小于1/4节,否则有危险;3.因船舶动量特大,一般不可应用锚来制动,最忌违的是航行中下锚;4.一般均采用深水抛锚法,用锚机倒至海底,松出一定长度锚链后,再用常规方法松链。
超大型船舶的船型均肥胖而粗短,其方型系数多高于0.8,船越大C B亦越大,即是压载时C B也可达0.75以上,其长度比L/B为6.0 – 6.7,比一般货船小,而宽与吃水之比多大于2.5,比一般货船大,其舵面积比A/Lpp * d多低于1/65,但却具有良好的旋回性,从而使得超大型船舶的追随性和航向稳定性能较差,而旋回性能较好,主机功率随船型的增大而增大,但并不与其吨位成比例,其单位吨位马力值有较大降低,且其全速倒车速度也仅能达到全速前进时的30%左右,一般均在6节以下。
Outline of Manoeuvre Characteristics of VLVOwing to the large measures and great DWT of VLV and relatively smaller main engine horse power per ton, there are many characteristics different from those of the 10,000 ton to 20,000 ton vessels.1. Ship’s Manoeuvrability Coming Down1.1Bad steering: slow reaction, no rudder effect, turn at the 3-4 kt speed.1.2Bad yaw quick responsibility: make enough estimate and make rudder in time whenaltering course or passing the bend channels.1.3Poor course stability (directional stability): after making rudder pay attention to makeopposite rudder in time the ship head being to slant.1.4Bad course keeping ability: in the storm weather, easy to be off course, because of lowB/L *D value.1.5Good steady turning ability: although there is a big turning circle, D/L value is smallgood turning ability appearing.1.6Big starting and stopping inertia: changing speed appear duller, stopping ability is not sogood.1.7Big turn inertia: in order to make big rudder angle, make rudder early, make early returnrudder, make big opposite rudder angle.1.8Because of big stopping inertia crush stopping ability comes down.2. More evidence effects in Shallow and Narrow Channel2.1 Resistance increase, speed coming down.2.2 Trim happening because of ship body sinking.2.3 Steady turning ability becoming not so good.2.4 Vibration intensifying, abnormal vibration appearing.2.5 Course stability being better.2.6 Rudder force changing.2.7 Require enough U.K.C, because of trim and heel.2.8 Bank effect easy to happen in narrow channel sailing.2.9 Require enough breadth of sea bottom for leeway.2.10 Keep necessary distance from other ship while is going to overtake or head-on.3. In the Harbor Manoeuvre Characteristics3.1 Tugs become main force to maneuver VLV because of limited harbor water area.3.2 Need several tugs to go alongside or leave berth or move transversely.3.3 Need different tug disposition according to different tasks.3.4 In turning process pay attention to the kick of own ship stern.4. Restricted to use Anchor in Manoeuvring4.1 Almost use single anchor at anchorage.4.2 Pay special attention to using anchor in maneuver, ex. Turning with anchor, speed haveto be less than 1/4 KT, otherwise there are dangers because the brake of windlass has noenough break power.4.3 Usually don’t use anchor to brake, for the ship’s very big momentum. Anchoring innavigation is prohibited.4.4 Usually use the deep water mooring, anchor is to send by windlass to the sea bottom,after sending out certain length of chain use normal method to slack chain.VLV type ship is fat, short and bulk; its block coefficient is almost more then 0.8. The bigger the C b, even in the ballast C b will be more then 0.75. It’s radio of length and breadth is 6.0 –6.7, smaller then general cargo ship, but ratio of breadth and draft is more then 2.5 bigger then general cargo ship. It’s ratio of rudder area and side area A R/Lpp * d is almost smaller then 1/65, but it has good turning ability. So the yaw quick responsibility and the course stability of VLV are not so good but the turning ability is better. With the increase of the ship’s tonnage the main engine power is raised, but its HP per tone has bigger descend.大型船舶操纵特性1.大型船舶惯性11停车惯性超大型船质量大, 其冲程冲时均长,一般至余速5节时的冲程达14L,(3海里)4节时为18L,3节的冲程均达23L以上,冲时可达接近半小时。
12倒车惯性据IMO暂行规定,全速倒车停船行程不应超过15倍船长。
13影响惯性因素●排水量●主机倒车功率及换向时间●船速●船型●外界因素●推进器种类14各种制动方法及其运用●倒车制动法:倒车制动,是一种有效的制动方法。