基于HALCON的过山车轨道动态位移视觉测量
基于HALCON和VC_混合编程的视觉测量系统设计
觉测量功能,在构建完成的试验硬件平台上,通过试 验实现系统的可靠性和稳定性验证。
文献标识码: A
文章编号:1672-2914(2011)06-0020-05
Vision Measurement System Design Based on HALCON and VC++ Mixed Programming
JI Jun1,YAN Li-fu2,ZHANG Hui1,LI Yan-hong1
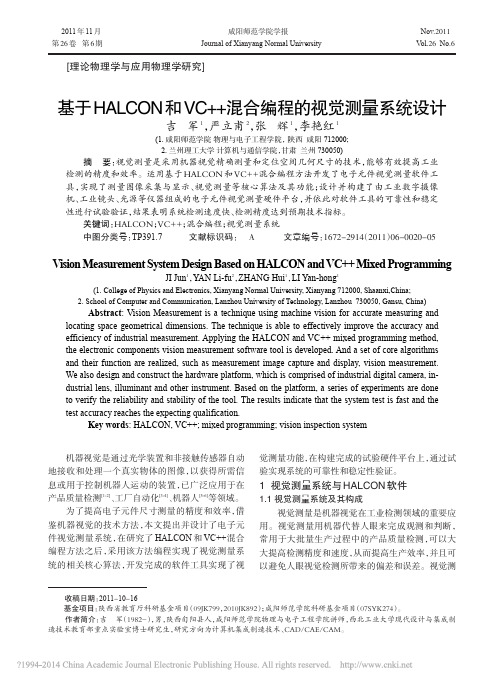
Step 3 配置 HALCON 和 VC++混合编程的程序 开发环境;
混合编程环境配置
Start
HDevelop 环境下开发 视觉测算法 否
程序功能验证 是
HDevelop 输出程序 C++代码
VC++环境下封装 C++代码
修改、调试 C++代码
否 程序功能验证
是 编译、链接,产生应用程序
End
图 1 HALCON 和 VC++混合编程的设计流程
第6期
吉 军,等:基于 HALCON 和 VC++混合编程的视觉测量系统设计
· 21 ·
量系统通过图像摄取装置将被摄取目标转换成图像 信号,传送给专用图像处理系统进行各种运算来抽 取目标特征,进而根据判别的结果来控制现场的设 备动作[7]。
视觉测量系统通常由硬件和软件两部分组成, 硬件主要包括工业数字摄像机、工业镜头、光源、工 业 PC 机、图像采集卡、监视器和通讯/输入输出单元 等;软件则是根据具体的测量内容和精度要求由设 计人员自行开发。 1.2 HALCON 及 HALCON/C++
基于Halcon的大视场视觉标定方法研究

基于Halcon的大视场视觉标定方法研究张勇; 漆军【期刊名称】《《机电工程技术》》【年(卷),期】2019(048)008【总页数】3页(P1-3)【关键词】视觉标定; Halcon; 坐标转换【作者】张勇; 漆军【作者单位】广东机电职业技术学院广东广州 510550【正文语种】中文【中图分类】TP391.410 引言近年来,机器视觉技术快速发展且日益成熟,其在工业加工过程的应用越来越广泛,特别是在微电子封装、五金、服饰等行业的点胶加工中,控制系统采用机器视觉完成模板匹配定位可实现高精度、高频率、高效率的自动加工。
标定是机器视觉使用中必不可少的一个步骤,要利用摄像机进行视觉感知获取目标的位置等三维信息就必须进行摄像机标定[1],空间某点的位置和其在图像中对应映射点之间的关系是由摄像机成像的数学模型唯一确定[2],该模型是由摄像机内部几何与光学特性参数(内参)和表示摄像机在三维空间坐标系中位置和方向的参数(外参)组成,确定内外参数的过程即摄像机标定[3-5]。
本文针对视觉点胶行业中的大视场加工要求,提出一种基于Halcon相机畸变校正与画网格提取角点进行加工区域坐标标定相结合的方法,在完成点胶控制系统中机器视觉标定功能的同时,可快捷准确进行点胶加工轨迹的规划与转换,从而提升控制系统操作便捷性,极大提高了加工效率。
1 系统结构如图1、图2所示,本系统采用四轴运动控制卡+工控机+工业相机的架构,为了增加视场的视野,将工业相机直接安装与机器顶部可对整个加工区域进行拍照采集,本系统采用的是2 000万像素工业相机,拍照的加工区域达到600 mm×400 mm,满足当前服饰点胶行业对加工视场宽度越来越高的需求。
图1 系统结构图控制系统的主要执行流程如下:工业相机标定->画网格提取角点确定坐标对应关系->视觉勾图确定加工路径->实际生产加工启动->拍照->图片畸变处理->模板匹配->根据坐标对应关系确定所有匹配产品加工路径->产品喷胶加工->完成,如图3所示。
干扰环境下基于计算机视觉的多目标动位移高精度监测方法

干扰环境下基于计算机视觉的多目标动位移高精度监测方法作者:周洲陈太聪来源:《振动工程学报》2021年第05期摘要:当前基于计算机视觉的动位移测量研究通常要求高速高分辨率摄像机和理想拍摄环境,以保证测量的性能和精度。
然而高速相机成本较高,目标成像需要较高对比度,且实际拍摄过程中环境条件也难以保持稳定,导致应用受限。
结合时空上下文算法和光流算法,提出一种无需人工标靶点、鲁棒的多目标位移监测方法,通过智能手机实现干扰环境下的结构多点动位移同步测量。
开展悬臂小球模型的扫频实验,检验方法在一定频率范围内的测量效果。
其中,使用智能手机对激振小球进行拍摄,并在实验中保留复杂背景和模拟光照变化。
分别采用所提方法和常用的特征光流算法对视频进行处理,得到动位移结果,并与位移传感器测量值进行对比。
结果表明,在有光照变化干扰下,所提方法具有更强的抗干扰性,各监测点的最大位移偏差在5%以内。
关键词:结构健康监测; 位移测量; 计算机视觉; 时空上下文; 光流中图分类号: O327; TU317 文献标志码: A 文章编号: 1004-4523(2021)05-0979-08DOI:10.16385/ki.issn.1004-4523.2021.05.011引言在结构健康监测实践中,加速度传感器得到了广泛应用,可直接测量结构的加速度响应,但对于低频范围的应用效果不佳[1]。
相反,位移传感器的低频测量结果更加精确,然而由于安装和测试的不便,应用相对较少,包括线性可变差动变压器需要固定支座辅助测量,而多普勒激光测振仪虽然可实现无接触测量,但测量结果受激光聚光影响较大,且设备成本也相对较高。
近年来,随着图像数据采集和计算机视觉技术发展,基于视觉的位移测量技术表现出无接触、远距离、低成本和高精度等优点,受到了广泛关注[2⁃3]。
Dworakowski等[4]和韩建平等[5]利用图像模板匹配技术,使用高速相机实现了单点动位移测量,其中需要安装人工目标板辅助测量。
基于HALCON的移动车辆检测方法研究

基于HALCON的移动车辆检测方法研究鲍岚辉;蔡竞【摘要】为了实现移动车辆的快速准确识别,基于HALCON软件提出一种移动车辆自动识别方法,根据帧差法原理将视频序列中当前帧图像分别与相邻前、后两帧作差,再将差值作“与”运算,通过设定分割阈值检测出移动的目标,最后结合目标区域几何特征筛选出移动车辆.实验结果表明,这种方法检测正确率高,且适用于多个移动目标检测场景.【期刊名称】《现代计算机(专业版)》【年(卷),期】2016(000)026【总页数】5页(P70-73,80)【关键词】HALCON;目标检测;帧差法;三帧差法【作者】鲍岚辉;蔡竞【作者单位】浙江警察学院刑事科学技术系,杭州310053;浙江警察学院刑事科学技术系,杭州310053【正文语种】中文随着车辆数目的急剧增长,快速、准确地从视频或录像中识别出移动车辆的信息并进行跟踪,将有助于优化交通治理方案、缓解交通拥堵现象,并为抓捕犯罪逃逸车辆提供技术支持。
因此,研究针对移动车辆的检测方法具有重大意义。
目前移动车辆目标检测主要是基于视频检测,采用计算机视觉和图像处理技术对视频进行处理,从而筛选得到有用的移动车辆信息。
常见的移动车辆检测算法有:背景减法、光流法、帧差法,实践中各方法都存在其优点和不足之处。
例如,背景减法对周围环境因素如多光源、阴影、噪声变化比较敏感,检测误差较大;光流法不适用于摄像机静止不动的场景;帧差法检测目标速度过快和过慢时会产生较大误差。
池利阳、李民政、吴新强提出了一种运动目标检测实时性和鲁棒性的方法,针对二帧差法和背景差法各自的不足提出建立在这两种方法基础之上改进算法,在一定程度上提高了运动目标检测率[1]。
於正强、潘赟、宦若虹提出了一种结合帧差法和混合高斯的运动检测算法,该方法缓解了相邻帧差法产生的空洞问题,也消除背景物体突然转为运动物体后产生的"影子"问题[2],相对于相邻帧差法,三帧差分法具有受周围环境影响小,检测率高的优点。
基于HALCON的钢轨表面缺陷检测技术研究

基于HALCON的钢轨表面缺陷检测技术研究庹兴兵;徐志根【摘要】针对当前检测钢轨表面缺陷存在的效率低、易漏检误检问题,提出一种基于HALCON图像处理软件开发的钢轨表面缺陷检测方法,实现测量过程中对缺陷图像的识别和处理.通过钢轨模拟检测平台采集钢轨表面图像,利用HALCON软件对获取的原始图像进行预处理、边缘检测、目标特征提取,计算相关几何特征信息并定位钢轨表面缺陷.实验表明,该方法具有较高的测量精度和测量效率,能够满足实际应用,为钢轨表面缺陷在线检测提供了新的途径.%Aiming at the existing problems of inefficiency, leak and error in the detection of rail surface defects, this article presented a method to detect the surface defects of rail based on HALCON software, and implement functions of recognizing and processing of defect images. The method was to acquire rail surface images by a simulative rail test platform, preprocess the original images, detect edge, extract features by using HALCON software, calculate and calibrate the relevant geometrical information of defects, get the position of different kinds of defects finally. The experiment showed that this method was with high measuring precision and efficiency, and could meet the practical application, provided a new way for on-line measurement for rail surface defects.【期刊名称】《铁路计算机应用》【年(卷),期】2017(026)011【总页数】6页(P63-68)【关键词】钢轨检测;HALCON;图像处;缺陷【作者】庹兴兵;徐志根【作者单位】西南交通大学信息科学与技术学院,成都 611756;西南交通大学信息科学与技术学院,成都 611756【正文语种】中文【中图分类】U213.42;TP39钢轨作为轨道交通系统中车辆运动的载体,其表面平顺性和缺陷检测对轨道交通的安全运行至关重要。
基于Halcon的运动目标追踪研究

基于Halcon的运动目标追踪研究作者:郭壮曹冬梅童一飞来源:《现代电子技术》2017年第15期摘要:为达到对运动磁环快速准确的追踪,实现机械手实时分拣抓取,分析了运动目标检测算法,基于磁环运动建立卡尔曼滤波状态估计模型,对于连续采集图像序列利用卡尔曼滤波背景估计检测算法来确定感兴趣区域,经Halcon图像处理,实现对运动目标的实时监测追踪。
仿真对比验证了卡尔曼滤波能避免背景、光照扰动问题,准确地估计背景提取前景,不会对运动物体出现漏检情况,系统可靠性高、适用性强,为运动物体实时追踪提供了理论依据。
关键词:运动磁环;卡尔曼滤波;背景估计; Halcon;追踪监测中图分类号: TN911.73⁃34 文献标识码: A 文章编号: 1004⁃373X(2017)15⁃0014⁃03Abstract: In order to track the moving magnet ring quickly and precisely, and realize thereal⁃time sorting and scratching of manipulator, the moving object detection algorithm is analyzed. On the basis of the magnet ring motion, a state estimation model of Kalman filtering was established. The background estimation detection algorithm of Kalman filtering is used to determine the region of interest of the image sequence acquired continuously. The image sequence is performed with image processing based on Halcon to realize the real⁃time monitoring and tracking of the moving object. The simulation contrastive verification results show that the Kalman filtering can avoid the problems of background and illumination disturbances, estimate the background and extract the foreground precisely,won′t appear the situation of missed detection moving objects, and the system has high stability and strong applicability, which provides a theoretical basis for the real⁃time tracking of moving objects.Keywords: moving magnet ring; Kalman filtering; background estimation; Halcon;tracking and monitoring0 引言运动目标的追踪是利用信号和信息处理技术,综合目标的前一状态估计信息和传感器提供的在线测量信息对目标运动状态估计的过程。
基于机器视觉技术的轮轨横向位移测量方法

基于机器视觉技术的轮轨横向位移测量方法王延哲;陈志强;王雅婷【摘要】实时准确测量轮轨横向位移对改善车辆的舒适性和提高行车安全性具有重要意义.本文介绍了一种非接触式间接测量系统,该系统采用机器视觉技术并辅助以轮廓光,运用Blob算法测量运行中的车轮相对于钢轨的横向位移.通过分析该系统静态测试结果,对该系统进行了改进,优化了系统资源,提升了计算速度,并使测试结果更加精确稳定.最后对改进后的系统测试结果进行了分析,并给出了测试建议.【期刊名称】《铁道建筑》【年(卷),期】2018(058)011【总页数】4页(P135-138)【关键词】轮轨横向位移;测量方法;机器视觉技术;Blob算法;优化【作者】王延哲;陈志强;王雅婷【作者单位】中国铁道科学研究院集团有限公司机车车辆研究所,北京 100081;中国铁道科学研究院集团有限公司机车车辆研究所,北京 100081;中国铁道科学研究院集团有限公司机车车辆研究所,北京 100081【正文语种】中文【中图分类】U216.3铁道机车车辆轮对是2个对称的近似圆锥体。
列车在平行的直线轨面上运行时,如有微小的激扰作用,轮对即可产生蛇行运动,即一方面沿轴线横向移动,另一方面绕通过其重心的铅垂轴转动。
在理想条件下,机车车辆运行速度控制在一定范围内,轮对产生的蛇行运动可随着时间的延续而减弱,即为稳定的蛇行运动。
当运行速度超过临界速度后,蛇行运动的振幅随着时间的延续而增强,进入不稳定的蛇行运动[1]。
当机车车辆的蛇行运动失稳后,蛇行运动振幅增大,引发轮缘和轨面摩擦加剧,甚至产生横向冲击,这样不仅会使车辆的运行性能恶化,旅客的舒适度下降,作用在车辆各零部件上的动载荷增大,并且会损伤车辆及线路,甚至会造成脱轨事故。
所以蛇行运动是机车车辆实现高速运行的一大障碍。
而实时准确监测机车车辆蛇行运动,可为改善车辆的舒适性和提高行车安全性提供客观依据。
目前,监测机车车辆蛇行运动的方法有接触式直接测量和非接触式间接测量2种类型。
HALCON编程及工程应用 第9章 HALCON测量

fuzzy_measure_pairs相同,但其可以使用参数Pairing提取彼此相交或者包含 的边缘对。 ➢ reset_fuzzy_measure:重置一个模糊函数
HALCON编程基础与工程应用
9.2HALCON一维测量
模糊测量的主要步骤为:
(1)使用算子create_funct_1d_pairs创建模糊函数; (2)使用算子set_fuzzy_measure或set_fuzzy_measure_norm_pair为模糊集指定模糊隶 属函数。注意:可以重复调用算子定义多个模糊集,但是不能对同一模糊集指定多个 模糊隶属函数,指定第二个模糊函数意味着放弃第一个定义的模糊函数并将其替换为 第二个模糊函数。 之前为模糊集指定的模糊函数可以通过reset_fuzzy_measure删除。 (3)使用算子fuzzy_measure_pos、fuzzy_measure_pairs或fuzzy_measure_pairing提取 模糊测量的边缘对。
HALCON编程基础与工程应用
9.2HALCON一维测量
模糊测量:
模糊测量是对标准测量的一种扩展,并不是意味着测量是“模糊的”,而是用模糊隶属函 数来控制边缘的选择。所谓的模糊隶属函数,就是将边缘的特征值转化为隶属度值,基于这些 隶属值做出是否选择边缘的决定,即当隶属度值大于你设定的模糊阈值(Fuzzy Thresh)时,边 缘就会被选中,反之则反。举个简单的例子方便理解:比如在测量开关引脚之间的宽度和距离 时,引脚可能会有反射(左图),直接用一维测量会产生错误的结果(中图),这时将“大头 针的宽度大约为9像素宽”这个信息转化为模糊隶属函数。比如对于预期的宽度9像素,对应的 隶属度值为1;对于与预期的大小相差3个像素以上,则隶属度值为0,中间的值采用线性插值, 即宽度为da’yu8.像素的隶属度值就为0.67。当你设置的阈值为0.5时,那宽度为7.5-10.5像素之 间的边缘对才会被选中。通过这样的模糊测量则可以正确测量引脚的宽度(右图)。
基于HALCON 的视觉识别产线监测办法

图 4 填充裁剪后的判断区域
2.1.3 检测结果输出 通过批量灰度筛选后,可发现是否安装挺柱的灰度阈值存在
差异化。通过批量确定判定区域的阈值,结合灰度判定与面积的 裁剪,能够判断该区域是否存在漏装现象。最后对是否安装挺柱 个数进行计数,对已安装及未安装的数量进行目视化显示。
系统采用 count_obj 算子读取筛选后 region 的个数。若此 时 region 个数小于 16,则意味着存在漏装现象,有未安装的区 域被筛选裁剪,同时输出漏装个数。当系统判断漏装个数大于 0 时, 则该发动机缸盖存在挺柱漏装,系统输出 NOT OK 并报警 ;否则 系统判断该件合格,输出 OK,零件过检。
0 引言
当前车间流水线生产大多设置有点检工位,可用于沿线监测 当前零件是否存在误装漏装,或确认当前零件编码并通过人工扫 码来录入系统等。无论何种用途,多设置一个工位就意味着多一 份人工成本。为贯彻落实企业智能化发展及降本增效的理念,智 能化视觉识别技术的引入能够大大提高生产效率,加快流水线生 产节拍,降低人工成本,为企业带来可观的效益。
发动机缸盖挺柱通过流水线进行人工安装,共计 16 根挺柱。由 于人工操作的不确定性,容易出现漏装、错装的问题,故需设立点检 工位对是否正确安装挺柱进行检查判断。该办法不仅效率低,且人为
图 1 发动机缸盖挺柱漏装检测逻辑框图
2.1.1 图像采集模块 为减轻人工成本,取消原有点检工位,采取在流水线上安装
并分割重叠的区域,最后运用 connection 算子将区域进行分割。 分割完成后,利用 fill_up 算子对区域中的孔隙进行填充,
可形成完整的区域。再次通过面积裁剪,裁掉不符合条件的小块 面积,获得最终监测区域如图 4 所示。
图 2 发动机缸盖挺柱监测判断区域
基于HALCON的视频交通参数检测方法

0 引言
视频的交通参数检测一般是通过对车辆的检测和 跟踪, 利用优化算法计算车 头时距、饱 和流率等参 数, 从而达到对交通状况的分析和控制, 将交通流合 理分配至交通网络中, 提高道路的通行能力, 减少交 通事故的发生。图像处理软件 HALCON 是德国 MVtec 公司开发的机器视觉软件, 由一套图像处理库, 一千 多个各自独立的函数, 以及底层的数据 管理核心构 成, 包含了滤波、色彩分析以及几何、数学变换、形 态学计算分析、校正以及图像计算功能, 由于这些功
xy ( f ( 1, 1) + f ( 0, 0) - f ( 0, 1) - f ( 1, 0) ) + f ( 0, 0) 。 解出双线性方程系数后, 一般定义图像输出函数: g ( x , y ) = f ( x , y ) = f [ a( x , y ) , b ( x , y ) ] 。 ( 2) 在程序中, 梯形检测区域的顶点坐标分别为( 132,
通过感兴趣区域 ( Region Of Interesting ROI) 、车辆检 测、车辆跟踪等 3 个检测流程来提取交通参数。车辆 检测方法主要有 帧差法[ 2] 、背景差法[ 3] 、灰 度比较
收稿日期: 2007 09 07 基金项目: 国 家 高 技 术 研 究 发 展 计 划 ( 863 计 划 ) 资 助 项 目 ( 2006AA11Z208 ) ; 国 家 重 点 基 础 研 究 发 展 计 划 ( 973 计 划) 资 助 项 目
2 车速的检测
图 1 路段检测区域图 Fig 1 The monitored region for a road link
2 2 距离 时间确定之后, 利用双线性插值的方法[ 9] 对 L 1 和
HALCON编程及工程应用 第9章 HALCON测量
不同的是,它使用模糊函数来判断和选择边缘对 ➢ fuzzy_measure_pairing:提取垂直于矩形或扇环的直边对。提取算法与
fuzzy_measure_pairs相同,但其可以使用参数Pairing提取彼此相交或者包含 的边缘对。 ➢ reset_fuzzy_measure:重置一个模糊函数
轮廓处理
轮廓处理适用于高精度测量,可提取像素精度边缘或者亚像素精度的边 缘,其主要包括5个步骤:(1)创建轮廓;(2)选择轮廓;(3)分割轮廓; (4)利用已知形状拟合轮廓段;(5)提取未知轮廓的特征。
1.创建轮廓
轮廓处理从轮廓的创建开始,获取轮廓的常用方法是提取边缘。边缘是一张图片中 亮暗区域的过渡位➢ gen_measure_rectangle2:通过一个矩形创建一个线性测量对象 ➢ gen_measure_arc:通过一个圆弧创建一个扇环测量对象 ➢ measure_pos:提取测量区域内垂直于矩形或者扇环的边缘 ➢ measure_pairs:提取测量区域内垂直于矩形或者扇环的边缘对 ➢ measure_thresh:提取测量区域内轮廓线上具有指定灰度值的点 ➢ measure_projection:提取测量区域内投影线上的一维灰度值分布
HALCON编程基础与工程应用
9.3HALCON二维测量
2.区域分割算子
➢ threshold;binary_threshold;auto_threshold;dyn_threshold;fast_threshold和 local_threshold:分割出感兴趣的区域;
基于HALCON的双目视觉株高测量

基于HALCON的双目视觉株高测量作者:郝慧鹏等来源:《电子技术与软件工程》2013年第22期摘要计算机视觉技术是近几年来发展较快的信息处理技术,随着图像处理技术的专业化、计算机硬件成本的降低和速度的提高,计算机视觉的应用已变得越来越广泛。
株高是植物生长指标的重要参数,是一个物种争夺阳光能力的主要决定因素。
为此,本文基于HALCON,利用双目视觉方法对株高进行测量,通过对双目直接测量结果进行误差修正,使得实验得到的结果误差不超过2%,该方法具有一定的可行性。
【关键词】株高 HALCON 双目视觉误差修正1 引言计算机视觉技术是近几年来发展较快的信息处理技术,随着图像处理技术的专业化、计算机硬件成本的降低和速度的提高,计算机视觉的应用已变得越来越广泛,其中不乏在农业中的应用。
株高是植物生长指标的重要参数,是一个物种争夺阳光的能力的主要决定因素[1]。
对于作物来讲,株高参数是作物产量预估不可或缺的参数。
然而对于具体的利用机器视觉方法直接测量株高的研究还是比较少的,本文就是利用HALCON软件,采用双目计算机视觉方法来实现株高的测量。
2 双目视觉原理双目视觉的基本原理是从两个视点观察同一景物,获取不同视角下的两幅图像,然后根据三角测量原理计算不同图像对应像素间的视差(disparity ),获取景物的三维信息,从而实现场景三维重构。
根据两个摄像机位姿的不同,双目视觉有多种模式,常用的有双目横向模式,双目横向会聚模式以及双目纵向模式(也称双目轴向模式)。
为了增加测量精度,基线一般不能太小,但基线长度也不可太长,否则,由于物体各部分相互遮挡,两个摄像机可能不能同时观察到目标点。
图1是会聚双目成像中的视差原理图。
图中给出两镜头连线所在平面(XZ平面),两镜头中心间的距离(即基线)是B,两光轴在XZ平面相交于(0,0,Z)点,交角为(未知)。
现在来看如果已知像平面坐标点(x1, y1)和(x2, y2 ),如何求取世界点W的坐标(X,Y,Z)。
基于机器视觉的位移测量方法

基于机器视觉的位移测量方法
程荣;张亦明
【期刊名称】《建设科技》
【年(卷),期】2022()23
【摘要】本文提出了一种基于机器视觉的位移测量方法。
将两块测量面板粘贴在被测物体上,用移动端(手机、平板电脑等)设备拍摄图像后上传至服务器,服务器中部署的算法,采用图像处理中的透视变换方法计算被测物体之间的距离;该方法操作简单快速,测量精度可达0.1mm,测量时间为1s/次,可用于建设工程中的裂缝宽度监测。
【总页数】4页(P125-128)
【作者】程荣;张亦明
【作者单位】元准智能科技(苏州)有限公司
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于机器视觉技术的轮轨横向位移测量方法
2.基于机器视觉的无砟轨道层间结构位移测量方法研究
3.基于机器视觉的测绘工程地面位移形变测量方法
4.基于机器视觉的单目无标定二维位移测量方法
5.基于机器视觉与无人机的结构动位移测量方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于HALCON的视觉运动控制系统设计
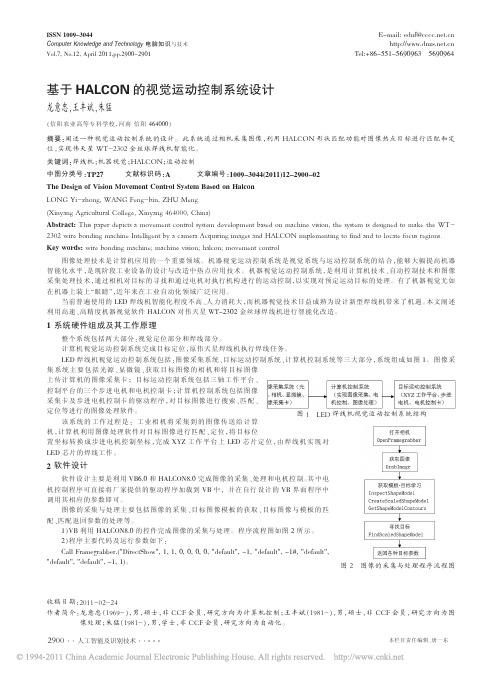
Computer Knowledge and Technology 电脑知识与技术本栏目责任编辑:唐一东人工智能及识别技术第7卷第12期(2011年4月)基于HALCON 的视觉运动控制系统设计龙意忠,王丰斌,朱猛(信阳农业高等专科学校,河南信阳464000)摘要:阐述一种视觉运动控制系统的设计。
此系统通过相机采集图像,利用HALCON 形状匹配功能对图像热点目标进行匹配和定位,实现伟天星WT-2302金丝球焊线机智能化。
关键词:焊线机;机器视觉;HALCON ;运动控制中图分类号:TP27文献标识码:A 文章编号:1009-3044(2011)12-2900-02The Design of Vision Movement Control System Based on HalconLONG Yi-zhong,WANG Feng-bin,ZHU Meng (Xinyang Agricultural College,Xinyang 464000,China)Abstract:This paper depicts a movement control system development based on machine vision,the system is designed to make the WT-2302wire bonding machine Intelligent by a camera Acquiring images and HALCON implementing to find and to locate focus regions.Key words:wire bonding machine;machine vision;halcon;movement control图像处理技术是计算机应用的一个重要领域。
机器视觉运动控制系统是视觉系统与运动控制系统的结合,能够大幅提高机器智能化水平,是现阶段工业设备的设计与改造中热点应用技术。
高速摄像仪在动态位移测量中的应用
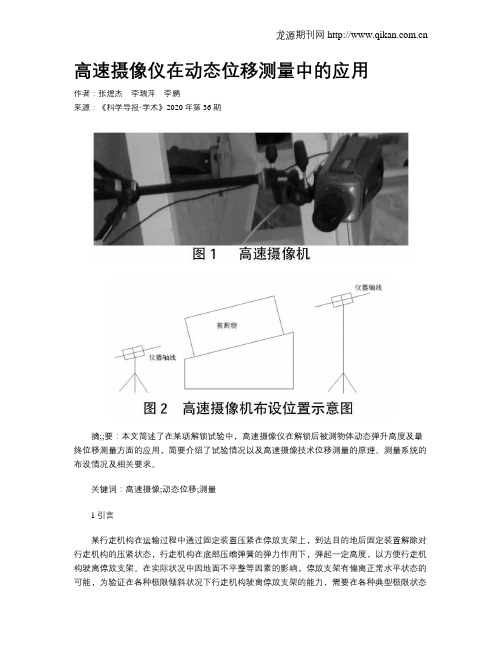
高速摄像仪在动态位移测量中的应用作者:张煜杰李瑞萍李鹏来源:《科学导报·学术》2020年第36期摘;;要:本文简述了在某项解锁试验中,高速摄像仪在解锁后被测物体动态弹升高度及最终位移测量方面的应用,简要介绍了试验情况以及高速摄像技术位移测量的原理、测量系统的布设情况及相关要求。
关键词:高速摄像;动态位移;测量1引言某行走机构在运输过程中通过固定装置压紧在停放支架上,到达目的地后固定装置解除对行走机构的压紧状态,行走机构在底部压缩弹簧的弹力作用下,弹起一定高度,以方便行走机构驶离停放支架。
在实际状况中因地面不平整等因素的影响,停放支架有偏离正常水平状态的可能,为验证在各种极限倾斜状况下行走机构驶离停放支架的能力,需要在各种典型极限状态下对行走机构的最大弹升高度及最终的弹升位移等参数进行测量。
测量方法之一使用了高速摄像测量技术,本文对摄像测量技术的简要原理、测量时仪器的布设情况以及测量特征点的布设情况进行了简要介绍。
2系统组成及测量原理本次试验时所用测量方法之一是使用了高速摄影测量技术。
高速摄影测量技术属于数字图像测量技术,是基于光学测量原理及计算机图像处理技术形成的一种新型测量技术。
所谓的图像测量就是测量被测量对象时,把图像当作检测和传递的手段或载体加以利用的测量方法,也就是在一系列的采样过程中通过图像传感器把被测目标的影像信息记录下来,并把图像信息数字化后送入计算机,利用图像测量原理和图像处理的各种技术通过计算机对数字图像进行分析、处理,通过被测物体图像的边缘计算被测物体的几何参数坐标,从而得到所需要的测量信息。
因此图像采集和图像处理技术是图像测量系统的基础和关键。
一般的圖像测量系统主要由照明系统、图像采集系统、通信部分以及计算机控制系统和图像处理软件等组成。
因此,影响系统精度的主要因素除了上述几个方面以外,还受图像处理软件算法的影响。
本次试验是以两台高速摄像机实现对弹升高度等动态信息的实时图像采集。
基于计算机视觉的位移测试方法研究与实现

基于计算机视觉的位移测试方法研究与实现陈苏;陈国兴;韩晓健;戚承志;杜修力【摘要】The circle detection effect,algorithm application range and calculation efficiency of different circle detection algorithms were analysed comparatively.Base on the circle detection algorithms,a vision-based dynamic displacement test method was developed and applied to large-scale shaking table tests.The results show that:both Hough transform circle detection algorithm and optimal fitting circle detection algorithm have good performance in circle parameters detection.The Hough transform circle detection algorithm is more suitable for testing under such operation conditions in which the test background is simple or with the need of identifying multiple target circles at once.The optimal fitting circle detection method is more suitable for testing under such operation conditions in which the test background is complex.By applying the vision-based displacement testing method to large-scale shaking table tests,the deformation of a model of soil foundation was tested.The method proposed can effectively solve the problem of displacement testing in complex test conditions.%针对Hough变换、最优圆拟合两种圆检测算法进行了圆检测效果、算法应用范围及计算效率的对比分析;研发了基于圆检测算法的非接触性动态位移测试方法并应用于大型振动台实验。
复杂背景下基于Halcon的刹车盘视觉检测

复杂背景下基于Halcon的刹车盘视觉检测殷春华; 杨宏韬; 赵爱国; 李岩; 师富杲; 刘克平【期刊名称】《《现代电子技术》》【年(卷),期】2019(042)017【总页数】4页(P49-52)【关键词】刹车盘检测; 图像采集; 图像处理; 阈值分割; 感兴趣区域确定; HSV颜色模式【作者】殷春华; 杨宏韬; 赵爱国; 李岩; 师富杲; 刘克平【作者单位】长春工业大学吉林长春 130000; 吉林省金沙数控机床股份有限公司吉林长春 130000【正文语种】中文【中图分类】TN911.73-34; TP290 引言在经济飞速发展的今天,汽车作为便捷的交通工具被越来越多的人所购买使用,刹车盘作为汽车的基础配件对汽车的安全性能起到了至关重要的作用。
在有限的生产周期内提升刹车盘的制造效率尤为重要。
目前,我国的刹车盘自动上料仓大多采用机械手进行刹车盘的搬运,但在复杂的工业现场中,往往因机械手误抓、漏抓现象而引起上料仓的一系列故障问题,破坏了工业现场的连续性,降低了刹车盘的生产效率[1-2]。
因此,研究一种在实际生产中能够准确检测到刹车盘的方法成为工业发展的需要。
在工业生产现场中,传统的人工巡检费时费力,且存在不稳定性等诸多问题,而采用重力传感器的方式进行刹车盘的检测则容易出现误检、漏检、成本过高等情况。
机器视觉最大的特点就是提高检测的灵活性和稳定性,在大批量重复性的工业生产过程中,减少人为因素带来的误差,提高了检测效率和上料进程,具有较高的研究价值和应用价值[3-5]。
本文针对复杂的工业现场环境,在刹车盘检测模块中结合机器视觉软件Halcon 提出一种三次阈值的刹车盘检测方法。
此方法能够动态地检测到刹车盘的状态信息,有效地获取目标区域,简化了图像处理的流程,且大大节省了工作时间,与人工巡检相比增强了工业生产的稳定性和连续性,从性价比、耐用程度来看也要强于重力传感器检测模式,为后续工业流程中刹车盘的放置工作铺垫了良好的前置条件。
基于动态物体特征点去除的视觉里程计算法

基于动态物体特征点去除的视觉里程计算法牛文雨; 李文锋【期刊名称】《《计算机测量与控制》》【年(卷),期】2019(027)010【总页数】5页(P218-222)【关键词】动态场景; 视觉里程计; ORB特征; KLT; 运动补偿【作者】牛文雨; 李文锋【作者单位】武汉理工大学物流工程学院武汉 430063【正文语种】中文【中图分类】TP2420 引言近年来,视觉同时定位和建图(VISUAL simultaneous localization and mapping,VSLAM)技术以其价格低、能耗小、采集信息多等优点在可移动机器人定位导航、虚拟现实及自动驾驶等领域得到了应用。
视觉里程计(Visual odometry, VO)作为VSLAM系统的前端,负责估计相机位姿,是整个VSLAM系统的重要组成部分。
传统视觉里程计方法假设系统工作在静态环境下,即特征点的提取与关联匹配不考虑行人、物体移动等因素带来的影响。
然而大多数实际场景中都存在行人或者运动物体,这给传统视觉里程计算法的精准定位带来了严峻的挑战,例如PTAM(parallel tracking and mapping) [1]和ORB-SLAM2[2]的VO、DSO(direct sparse odometry)[3]等视觉里程计算法都不能很好处理动态场景带来的影响,在动态场景中定位精度很差。
针对此问题,目前有学者提出了相应的研究方法,并取得了一定效果。
Alcantarilla等人将三维场景流应用到视觉里程计(VO)中,通过三维光流矢量的运动方向区分动静点[4],提升了两帧之间位姿估计的精度。
彭真利用静态空间点之间距离不变原则及德劳内三角剖分法分割动静态点集[5],提升了视觉里程计系统的定位精度。
上述两种方法取得了一定成效,但是当区分动静物体的阈值选取不当时,会出现将静点完全识别为动点,将动点完全识别为静点的现象。
Wang等人通过计算两帧图像之间的稠密光流聚类来区分动静物体[6],有效检测动态物体,但是稠密光流法耗时较长,不能实时运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X二 R _ = t
r— r X w十 r
、
( 1 )
将 上式 消 去后得 到 :
X r = R r R t X l 七 t r — R r R f L t l 因 此 ,两 个 摄 像 机 之 间 的相 对 位 置 关 系可 用 以下 和 t [ 2 表示 :
D o i : 1 0 . 3 9 6 9 / j . I s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 0 4 ( . E ) . 1 7
0 引言
过 山车 是 一 种 机 动 游 乐 设 施 ,常 见于 游 乐 园
和 主 题 乐 园 中 。 目前 对 于 过 山车 的研 究主 要 集 中
收稿日期:2 0 1 2 -1 1 -1 5 基金项目:学科建设综合计划 ( P X M2 0 1 2 — 0 1 4 2 1 3 _ 0 0 0 0 5 9 ) 作者简介:韩宝安 ( 1 9 8 8一),男,山东青岛人,硕 士,研 究方向为视 觉检测与检测 。
【 5 0 】 第3 5 卷 第4 期
的算 子 和 函数 ,需 要 时 只 需 调 用 即 可 ,下 面 是 在
HA L C O N中进行摄 像机 标 定的具 体过 程 。
和 ,以 及 图像 中心 点 坐 标 和 。如 果 外参 分 别 用 , 与R r ,t , 表 示 ,则 , 表 示 左摄 像机与世界坐标系之间的相对位置,B , 表 示 右摄 像 机 与世界 坐 标 系之 间的相 对位 置 【 l 】 。对 任意
一
点 P,若 它在 世界 坐标 系、左摄像 机坐 标 系和右
摄 像机 坐标 系下的 非齐 次坐 标分 别为 , , ,
则:
在 基 于 虚 拟样 机 技 术 的动 力 学 仿 真 分 析 ,研 究运
行 过程 中 车辆 位 置 、速 度 、加 速 度 和 受 力 的变 化 情 况, 获 得过 山车 的 各种 动 态性 能, 为过 山车 设 计和 性 能评 价 提 供 一种 新 手 段 。本文 基 于HAL C ON, 通 过 测得 过 山车 轨 道 的 动 态 位 移 ,来反 映 其 实 际
韩宝安 ,项辉字,李 哲,黄佳军
H A N B a o — a n , XI ANG H u i . y u , L l Z h e , HU A NG J i a . - j u n
( : l t c 京工商大学 材料与机械工程学院 ,北 京 1 0 0 0 3 7 )
2 0 1 3 - 0 4 ( 上)
点相对于静止位置在X 、Y 、Z 方向和三维空间中的振动位移与时间T 的关系曲线,并找到位移 的最大值和最小值 。研究表明 ,基于H A L C O N 的视觉测量技术是获 取过 山车运行过程 的振动参 数 ,对其进行性 能检测 一有效工具。
关键词 :过 山车 ;双 目立体视 觉;H A L C O N;双 目标定 ;双目测量 中囝分类号 :T P3 0 1 . 6 文献标 识码 :A 文章编号 :1 0 0 9 - 0 1 3 4 ( 2 0 1 3 ) 0 4 ( 上) - 0 0 5 0 -0 4
R=R r R I ~
t= t r— Rr Rt 一 t l
1 双 目立体视 觉标定
1 . 1 双 目立体视觉标定原理
双 目立 体 视 觉 的 标 定 主 要 是 指两 个 摄 像 机 的
( 3 )
内部 参数 和两 摄像 机之 间 的相对 位置 关 系 ( 外 参 )的 标 定 。每 个 摄 像 机 的 内外 参数 可 以通 过 单 摄 像 机 定 标 的方 法 分 别 得 到 ,其 中内参 包括 焦 距
摘 要 : 为 了实现对过 山车轨道动态位移的远距离非接触实时测量 ,本文研究采 用双目视 觉原理 , 测量 过 山车特征位置运行周期位移特征。基于H A L C O N 分 析了双目摄像机 的标定原理 ,标定图像的 采 集 ,进行标 定的步骤 ,内外参数 的确 定 ,双 目立体视 觉的测 量原理 ,测 量图像的 采集 ,以 及在 H A L C O N 中进 行三维坐标测 量的计算方法等 , 并 根据计算结果 , 在M a t l a b 中绘制出测量
1
訇 , t b
基于H A L C O N的过 山车轨道动态位移视 觉测量
HA LCo N bas ed r eaI t i me di s pl acem ent vi s i on m eas ur em en t of r ol l er coas t er t r ack
,
其 中尺和 f 分 别 表 示右 摄 像 机 坐标 系相 对于 左 摄 像机 坐标 系的旋转 矩阵 和平 位 像 素 的 尺 寸 大 小
1 . 2 标定 图像采集 拍摄 标 定 图像 时 ,要 保 证 标 定 板 在 左 右 摄 像 机 中都 能完 整成 像 ,表 I 是拍摄 到 的两组 图像 。 1 . 3 基于H A L C ON 的摄像机标定步骤 HAL CON包 含 了 很 多 图 像 分 析 和 视 觉 处 理