发那科常见的无报警信息的故障排除
FANUC-0ib 常见报警及处理方法

willinz 离线文章:21 搜索历史贴子金钱:180 | 经验:98给他发消息 | 加入好友查看详细资料注册:2006-10-233n1~3n6(绝对编码器故障)故障原因:编码器与伺服模块之间通讯错误,数据不能正常传送。
恢复方法:在该报警中牵涉三个环节:编码器,电缆,伺服模块。
先检测电缆接口,再轻轻晃动电缆,注意看是否有报警,如果有,修理或更换电缆。
在排除电缆原因后,可采用置换法,对编码器和伺服模块进行进一步确认。
3n7~3n8(绝对脉冲编码器电池电压低)故障原因:绝对脉冲编码器的位置由电池保存,当电池电压低有可能丢失数据,所以系统检测电池电压,提醒到期更换。
恢复方法:选择符合系统要求的电池进行更换。
必须保证在机床通电情况下,执行更换电池的工作。
SV400#,SV402#(过载报警)故障原因:400#为第一、二轴中有过载;402#为第三、第四轴中有过载。
当伺服电机的过热开关和伺服放大器的过热开关动作时发出此报警系统检查原理:伺服放大器有过载检查信号,该信号为常闭触点信号。
当放大器的温度升高引起该开关打开,产生报警,一般情况下这个开关和变压器的过热开关以及外置放电单元的过热开关串联在一起,该信号是当伺服有此报警时,由PWM指令电缆传给NC。
伺服电机过载开关检测电机是否过热,该信号也为常闭触点,当电机过热时,该开关打开产生报警,该信号发出报警通过电机反馈线通知系统。
诊断方法:当发生报警时可通过系统的诊断画面确认是哪一个轴发生的报警该诊断指明哪一个轴发生伺服报警720 . 7---X 轴721 . 7---Y 轴722 . 7---Z 轴723 . 7---4 轴该诊断区分是伺服放大器还是电机过热AIDF=0, 说明伺服放大器有问题AIDF=1, 说明伺服电机过热730 . 7---X 轴731 . 7---Y 轴732 . 7---Z 轴733 . 7---4 轴处理方法:当发生报警时,要首先确认是伺服放大器或是电机过热,因为该信号是常闭信号,当电缆断线和插头接触不良也会发生报警,请确认电缆,插头。
FANUC发那科工业机器人常见报警的解释

第一章常见报警的解释1.1 368报警(串行数据错误)上图中368报警以及相关编码器报警的原因有:(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
1(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443,610上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:21.3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
1.4 伺服放大器SVM内冷风扇报警608,4443上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。
上图中的报警出现时对应的伺服放大器上的LED 显示“1”。
1.5 主轴放大器和伺服放大器的内冷风扇位置4上图中:(1)主轴放大器内冷风扇的安装位置(2)伺服放大器内冷风扇的安装位置(3)主轴放大器的型号A06B-6111-H X#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HX注:(1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
发那科机器人常见故障代码和故障处理方法

常用故障代码和故障排除方法伺服 - 001操作面板紧急停止SRVO- 001 Operator panel E-stop[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
(注释)[对策1]解除操作箱/操作面板的紧急停止按扭。
[对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]更换配电盘。
[对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。
在采取对策6之前,完成控制单元的所有程序和设定内容的备份。
[对策6]更换配电盘。
(注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)伺服-001操作面板紧急停止伺服-004栅栏打开サーボ-007外部紧急停止伺服-204外部(SVEMG异常)紧急停止伺服-213保险丝熔断(面板PCB)伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止SRVO- 002 Teach pendant E-stop[现象]按下了示教操作盘的紧急停止按扭。
[对策1]解除示教操作盘的紧急停止按扭。
[对策2]更换示教操作盘。
伺服 - 003紧急时自动停机开关SRVO- 003 Deadman switch released[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]按下紧急时自动停机开关并使机器人操作。
[对策2]更换示教操作盘。
伺服 - 021SRDY断开(组:i轴:j)SRVO- 021 SRDY off (Group:i Axis:j)[现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。
发那克(FANUC)故障与维修经验总结1

FANUC数控系统故障报警及处理
冲数等于/小于0。
#4(DIR) :No.2022参数中设定的电机旋转方向错误(111
或-111之外的值)
#6(AXS) :No.1023参数(伺服轴号)中没有按1~控
制轴数的范围进行设定(例,用4取代3),或设定了不连续
1 的值。
32 2009-04-15
位置偏差量
33
1
2009-04-15
机械位置 参考点偏移功能
精加减速有效时的位置偏差
1
34 2009-04-15
电机温度信息
35
1
2009-04-15
误差检测
36
1
2009-04-15
21
1
2009-04-15
给出指令而机床 不移动的原因
z 000 WAITING FOR FIN SIGNAL 正在执行辅助功能。 z 001 MOTION 正在执行自动运转移动指令。 z 002 DWELL 正在执行暂停指令。 z 003 IN-POSITION CHECK 正在进行到位检测。 z 004 FEEDRATE OVERRIDE 0% 切削进给倍率为0%。 z 005 INTERLOCK/START LOCK 正输入互锁或启动锁住指令。 z 006 SPINDLE SPEED ARRIVAL CHECK 等待主轴速度到达信号。 z 010 PUNCHING 正在用阅读穿孔机接口输出数据。 z 011 READING 正在用阅读穿孔机接口输入数据。 z 012 WAITING FOR (UN)CLAMP 等待分度工作台分度结束信号。 z 013 JOG FEEDRATE OVERRIDE 0% 手动进给速度倍率为0%。 z 014 WAITING FOR RESET,ESP ,RRW OFF NC 处在复位状态。 z 015 EXTERNAL PROGRAM NUMBER SEARCH 正在检索外部程序
FANUC系统常见故障诊断与处理方法
FANUC系统常见故障诊断与处理方法摘要:介绍日本日立精机、牧野精机、森精机等公司产数控系统,包括了FANUC 16i、18i、21i、18T、21T等系列的故障:如电网闪断停机、内置脉冲编码器通信异常、伺服放大器误差、外围器件损坏等进行了分析逐步查找及处理。
关键词:FANUC系统故障诊断维修一、电网闪断和断电停机后出现的故障1.一台森精机产SH403加工中心,采用FANUC 18iMA系统。
电网闪断恢复后重新开机,显示“EX0557 OIL&AIR LUBRICANTPRESSURE DOWN”(主轴的油气润滑系统压力低下)报警。
检查发现中间继电器未接通,润滑泵无100V电压供给。
检查该中间继电器OK。
利用系统的自诊断功能,检查PMC信号,发现开机时,油气润滑的供油信号输出接点Y6.4接通,但该中间继电器线圈却不得电,于是,怀疑接点所在的I/0模块UNIT1-2的基板有问题。
将该印刷电路板对比调试后,未发现有任何问题,而该模块的其他输出接点均正常,据此判定是该输出接点烧坏。
替代,故障排除。
2.一台牧野产V55立式加工中心,采用FANUC 16 Mi系统。
设备断电停机几小时后再开机时,显示“306 APC ALARM: AXISBATTERY VOLTAGE 0(X);306 APC ALARM:AXIS BATTERYVOLTAGE 0(Y);306 APC ALARM:AXIS BATTERY VOLTAGE 0(Z);“300 APC ALARM: AXIS NEED ZRN (X);300 APC ALARMAXIS NEED ZRN (Y);300 APC ALARM: AXIS NEE D ZRN (Z)”。
这时切勿关断设备电源,将NC后备电池(4节)更换后,按“RESET”键即可消除306报警,然后选定“原点回归”方式,对各轴执行原点回归操作。
各轴回参考点后再按“RESET”键即可消除300报警。
FANUC系统共性故障分析和排除

FANUC系统共性故障分析和排除一、FANUC系统概述FANUC系统是一种常用于工业机器人和数控机床中的控制系统,由FANUC公司开发并推出。
FANUC系统具有高性能、稳定性和可靠性的特点,被广泛应用于各种工业领域。
然而,由于系统的复杂性,以及长时间运行中可能出现的各种问题,导致系统故障成为影响设备正常运行的一个重要因素。
二、FANUC系统的常见故障1.通信故障:FANUC系统中,由于通信硬件或软件的故障,可能导致控制系统与外部设备之间无法正常通信,造成设备操作受阻。
通信故障的排查需要检查通信线路、通信接口、通信协议等多个方面,以确定故障原因。
2.电源故障:FANUC系统中,由于电源供应不稳定或者电源线路故障,可能导致设备无法正常启动或者运行。
电源故障的排查需要检查电源输入输出是否正常,是否存在电源波动或者过载等问题。
3.硬件故障:FANUC系统中,由于硬件故障,可能导致系统一些功能无法正常使用,或者整个系统无法正常运行。
硬件故障的排查需要检查硬件组件的工作状态,如电路板、传感器、执行器等,以确定哪些硬件影响了系统的正常运行。
4.软件故障:FANUC系统中,由于软件程序出错或者系统配置不当,可能导致系统运行异常或者无法启动。
软件故障的排查需要检查软件程序的逻辑性和正确性,以及系统配置是否符合要求。
5.温度故障:FANUC系统中,由于温度过高或者过低,可能导致硬件故障或系统异常。
温度故障的排查需要检查设备的散热系统是否正常工作,以及环境温度是否符合设备使用要求。
6.机械故障:FANUC系统中,由于机械部件磨损或者配合不良,可能导致设备在运行过程中出现卡滞或者振动等问题。
机械故障的排查需要检查设备机械结构的各个部分,确定哪些部件需要更换或调整。
7.人为操作不当:FANUC系统中,由于人为操作不当或者误操作,可能导致系统设置错误或者功能错误,影响设备正常运行。
人为操作不当的排查需要检查设备操作记录和操作人员技能水平,找出错误的操作环节。
发那科FANUC 0系统的疑难故障分析及排除
发那科FANUC 0系统的疑难故障分析及排除(100例)数控产品网 2008-06-04 来源:网络转载阅读:7885次[ 内容简介 ]发那科FANUC 0系统的疑难故障分析及排除(100例)序号故障征兆故障原因解决办法1当选完刀号后,X、Y轴移动的同时,机床也进行换刀的动作,但是,X、Y轴移动的距离,与X、Y轴的移动指令不相吻合,并且每次的实际移动距离与移动指令之差还不一样没有任何报警,应属于参数问题。
1.修改参数0009号TMF,由0000****修改为0111****,该故障得以解决。
当0009=0000****时,TMF=16msec。
当0009=0111****时,TMF=128msec。
2.冬天,有可能润滑油的黏度大。
2手动脉冲发生器偶尔失效手动脉冲发生器的信号回路产生故障1. 确认手动脉冲发生器是否正常。
2. 更换存储板3机床不能回机床参考点检查参数534,最好在200~500之间1)把机床移动至坐标的中间位置再试试。
2)更换电机位置编码器4机床工作三小时,X轴发现振动声音在显示器屏幕上没有报警,是由参数设置不正确而引起的1)、修改8103#2=0→12)、修改8121=120→1005进给轴低速运行时,有爬行现象调整参数1)调整伺服增益参数;2)调整电机的负载惯量化。
6机床回参考点时,每次返回参考点时的位置都不一样调整参数重新计算并调整参考计数容量的值,即参数4号~7号或者参数570~573的值7切削螺纹时,乱扣更换了位置编码器和主轴伺服放大器及存储板都无效时参数49号设定不对,修改参数49#6由0→1。
8不能进行螺纹切削位置编码器反馈信号线路1)更换主轴位置编码器;2)修改参数;9在单脉冲方式下,给机床1μ指令,实际走30μ的距离。
参数问题参数8103设定错误,修改8103#5由1→010车床:用MX不能输入刀偏量未设参数参数10#7位设111X、Y轴加工圆度超差没有报警调整参数:1)伺服的增益:要求两轴一致。
FANUC常见报警故障分析

FANUC常见故障报警分析FANUC风扇报警总结:主轴SPM:一、系统报警显示9056,主轴驱动器报警显示代码56:报警内容:SPM控制电路部分的冷却风扇停止(主轴驱动器内部风扇失效)1.控制板安装问题请切实安装控制印刷板.(控制板与功率板的连接器脱离时,有可能会发出本报警)2.请更换SPM或SPM内部的冷却风扇二、系统报警显示9088,主轴驱动器报警显示代码88:报警内容:SPM散热器冷却风扇停止.(主轴驱动器外部风扇失效)发生报警时,请更换SPM散热器冷却风扇三、系统报警9001,主轴驱动器报警显示1报警内容:电机过热.电机内部高于或等于标准温度,电机温度过高。
(一).切削过程中显示本报警时(电机温度过高)1.确认电机的冷却状态,电机冷却风扇,对液冷电机,请确认冷却系统.2.请再次确认加工条件.(切削条件:吃刀量,刀具,材料)(二).轻负载下显示本报警时(电机温度过高)1.频繁加/减速:请在包含加/减速运行时输出功率的平均值要小于等于额定值的条件下使用.2.电机固有参数设定不正确.(三).电机温度较低而显示报警时1.主轴电机反馈电缆故障,电机过热信号电缆断线或接触不良,请更换反馈电缆.2.参数未正确设定电机温度通过参数4134设定,因电机而异。
是电机固有参数。
第一主轴电机温度,在诊断403里可以显示,显示αi主轴伺服电机线圈温度,模拟温度数据在主轴反馈电缆里,信号为THR1和THR2。
现象可能是:1温度长闭开关,2热电偶就可通过参数设定,具体值。
涡流,放大器错误都报警。
3.控制印刷电路板故障.请更换控制印刷电路板或主轴放大器.4.电机(内部温度传感器)故障,请更换电机.电源PSM:一、系统报警显示SV443,SP9059,电源模块PSM上报警显示2报警内容:PSM内部排风扇失效.(电源模块内部风扇故障)处理方法: 观察冷却风扇的状态.更换风扇,更换侧板443报警:PSM内部排风扇停止。
β系列SVU内部排风扇失效。
发那科机器人常见故障代码和故障处理方法
发那科机器人常见故障代码和故障处理方法常用故障代码和故障排除方法伺服- 001操作面板紧急停止SRVO- 001 Operator panel E-stop[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED (绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。
[对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]更换配电盘。
[对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。
在采取对策6之前,完成控制单元的所有程序和设定内容的备份。
[对策6]更换配电盘。
(注释)SYST-067面板HSSB断线报警同时发生,或RDY LED 熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)伺服-001操作面板紧急停止伺服-004栅栏打开サーボ-007外部紧急停止伺服-204外部(SVEMG异常)紧急停止伺服-213保险丝熔断(面板PCB)伺服-280SVOFF输入伺服- 002示教操作盘紧急停止SRVO- 002 Teach pendant E-stop[现象]按下了示教操作盘的紧急停止按扭。
[对策1]解除示教操作盘的紧急停止按扭。
[对策2]更换示教操作盘。
伺服- 003紧急时自动停机开关SRVO- 003 Deadman switch released[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]按下紧急时自动停机开关并使机器人操作。
[对策2]更换示教操作盘。
伺服- 021SRDY断开(组:i轴:j)SRVO- 021 SRDY off (Group:i Axis:j)[现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY 处在断开状态。
发那克(FANUC)故障与维修经验总结
发那克(FANUC)故障与维修经验总结发那克(FANUC)故障与维修经验总结cnc,电脑锣数控机床的故障分析:数控机床的应用越来越广泛,其加工柔性好,精度高,生产效率高,具有很多的优点。
但由于技术越来越先进、复杂,对维修人员的素质要求很高,要求他们具有较深的专业知识和丰富的维修经验,在数控机床出现故障才能及时排除。
我公司有几十台数控设备,数控系统有多种类型,几年来这些设备出现一些故障,通过对这些故障的分析和处理,我们取得了一定的经验。
下面结合一些典型的实例,对数控机床的故障进行系统分析,以供参考。
一、NC系统故障1.硬件故障有时由于NC系统出现硬件的损坏,使机床停机。
对于这类故障的诊断,首先必须了解该数控系统的工作原理及各线路板的功能,然后根据故障现象进行分析,在有条件的情况下利用交换法准确定位故障点。
例一、一台采用德国西门子SINUMERIK SYSTEM3的数控机床,其PLC采用S5─130W/B,一次发生故障,通过NC 系统PC功能输入的R参数,在加工中不起作用,不能更改加工程序中R参数的数值。
通过对NC系统工作原理及故障现象的分析,我们认为PLC的主板有问题,与另一台机床的主板对换后,进一步确定为PLC主板的问题。
经专业厂家维修,故障被排除。
例二、另一台机床也是采用SINUMERIK SYSTEM3数控系统,其加工程序程序号输入不进去,自动加工无法进行。
经确认为NC系统存储器板出现问题,维修后,故障消除。
例三、一台采用德国HEIDENHAIN公司TNC155的数控铣床,一次发生故障,工作时系统经常死机,停电时经常丢失机床参数和程序。
经检查发现NC系统主板弯曲变形,经校直固定后,系统恢复正常,再也没有出现类似故障。
2.软故障数控机床有些故障是由于NC系统机床参数引起的,有时因设置不当,有时因意外使参数发生变化或混乱,这类故障只要调整好参数,就会自然消失。
还有些故障由于偶然原因使NC系统处于死循环状态,这类故障有时必须采取强行启动的方法恢复系统的使用。
发那科FANUC系统的PSMSPM故障分析及排除

10
SPM的LED上显示13(ALM红灯点亮)。
CPU内部数据存储出错,此报警很少出现。
更换SPM的控制侧板。
11
SPM的LED上显示19或20(ALM红灯点亮)。
3.将电源模块送修。
7
PSMR显示08报警。
放电异常报警
3.观察如果是在加工过程中出现,关机停一段时间后再开,如果报警消失,则是频繁启动停止造成放电量太多,可修改加工程序,或减少切削量。
4.主回路的放电模块故障,更换。
5.放电控制回路故障,更换SPMR。
3.αi系列主轴模块SPM报警
1
SPM显示A,A0或A1报警
系统开机自检后,如果没有急停和报警,则发出*MCON信号给所有SVM,SVM接收到该信号后,接通主接触器,电源单元吸合,LED由两横杠(--)变为00,将准备好信号送给伺服单元,伺服单元再接通继电器,继电器吸合后,将*DRDY信号送回系统,如果系统在规定时间内没有接收到*DRDY信号,则发出此报警,同时断开各轴的*MCON信号。
3.更换控制侧板。
6
PSMR显示07报警。
控制板检测到直流侧高电压报警。一般发生在主轴电机减速时,此时SPM上显示11(ALM红灯点亮)。
1.电源模块的功能是为后面的SPM,SVM提供电源和回馈制动作用,当PSM检测到需要执行回馈制动时,却不能执行或没有执行,就会出现此报警。
2.只可能是PSM故障,或三相输入线接触不好,检查三相输入电压是否平衡,各接线端子或接触器、空气开关是否接触牢固。
6.检查PSM,SPM,SVM之间的连接线是否连接错误或连接不牢固。
FANUC-0ib 常见报警及处理方法
FANUC-0ib 常见故障报警和处理方法1.P/S00#报警2.P/S100#报警3.P/S101#报警4.P/S85~87串行接口故障5.90#报警(回零动作异常)6.3n0(n轴需要执行回零)7.3n1~3n6(绝对编码器故障)8.3n7~3n8(绝对脉冲编码器电池电压低)9.SV400#,SV402#(过载报警)10.SV401,SV403(伺服准备完成信号断开报警)11.SV4n0:停止时位置偏差过大12.SV4n1(运动中误差过大)13.SV4n4#(数字伺服报警)14.SV4n6报警:反馈断线报警15.ALM910/911 RAM奇偶校验报警16.手动及自动均不能运行17.不能JOG操作运行18.不能自动运行各种报警的原因及处理:P/S00#报警故障原因:设定了重要参数,如:伺服参数,系统进入保护状态,需要系统重新起动,装载新参数。
恢复办法:在确认修改内容后,切断电源,再重新起动即可P/S100#报警故障原因:修改系统参数时,将写保护设置PWE=1后,系统发出该报警。
恢复方法:①发出该报警后,可照常调用参数页面修改参数。
②修改参数进行确认后,将写保护设置PWE=0③按RESET键将报警复位,如果修改了重要的参数,需重新起动系统P/S101#报警故障原因:存储器内程序存储错误,在程序编辑过程中,对存储器进行存储操作时电源断开,系统无法调用存储内容。
恢复方法:①在MDI方式,将写保护设置为PWE=1②系统断电,按着(DELETE)键,给系统通电。
③将写保护设置为PWE=0, 按RESET键将101#报警消除。
P/S85~87串行接口故障故障原因:在对机床进行参数、程序的输入,往往用到串行通讯,利用RS232接口将计算机或其它存储设备与机床联接起来。
当参数设定不正确,电缆或硬件故障时会出现报警。
故障查找和恢复:85#报警指的是:在从外部设备读入数据时,串行通讯数出现了溢出错误,被输入的数据不符或传送速度不匹配,检查与串行通讯相关的参数,如果检查参数没错误还出现该报警时 , 检查I/O设备是否损坏86#报警指的是:进行数据输入时I/O设备的动作准备信号(DR)关断。
发那科机床问题排查
加工中心主轴声音大1 机械方面如电机冷却风扇损坏或刮擦电机外壳,电机固定不稳等。
这方面的情况好处理一些,只要能找到噪音源,一般好处理。
2 电气方面(1)变频器载波频率设置太低可以适当把载波频率设置高些,但这时又会带来一些问题,如果载波频率调得太高,又会对其它设备造成干扰,尤其是当采用PLC通讯方式时。
因此要根据现场的实际情况设置载波频率。
(2)电机共振有时,电机在运行时的某一频段会产生机械共振。
这时可以利用变频器的跳频设置方法。
一般变频器都有“跳频”设置,其作用是:设置电机共振的频率,当变频器运行到此频段时,跳过此段频率,避免电机产生共振。
(3)电机带负载能力降低有时电机长时间使用后,或电机质量不好,带负载能力会降低。
这里电机的噪音也会比正常时大。
(4)变频器高次谐波大变频器高次谐波成份大时,容易造成电机震动增大,转速产生抖动、不稳定,并且增大电机噪音。
这里加装AC(输入侧)和DC(输出侧)电抗器。
皮带出现异响基本上有以下原因:一、张力过高二、张力过低三、带轮破损四、皮带型号和带轮不对应∙∙∙FANUC 0MD 无输出故障故障现象:机床上电后,刀库原位继电器吸合,启动CNC,出现910、911报警。
4月24日一台北京机电院的VMC750E(2000年出厂)加工中心,系统FANUC 0MD。
排除过程:机床一上电,未启动CNC,继电器就吸合,说明系统的I/O板有输出,根据经验,多半是板子的输出放大元件或其它有击穿或短路。
910、911报警是RAM奇偶校验错误,在同时按住删除+复位键,启动CNC,清除参数,以上报警消除,这是重新输入参数,系统重新启动,又出现910、911报警,怀疑存储板或主板坏了,由于无备板,只好暂时不管,就修I/O问题。
拆下I/O板A16B-2203-011,对照原理图,刀库原位继电器由M19输出,在M19找到脚位,查找与它相通的是哪一个集成块,最后找到TD62107P 元件见图,经与相同元件比较测量,其8、11脚导通,其它都没有导通,证明此TD62107P集成块损坏。
FANUC常见故障及解答

故障风扇放大器-FANUC常见故障及解答摘要:柴油机燃油技术-玉柴YC6L-40型柴油机顺利通过鉴定行业机床机械-2007年机械行业发展预测传感器加工工件-机械加工用传感器的发展趋势企业工商系统-我国将建黑牌企业数据库根绝企业失信政府买单市场产品份额-陕汽速度撼动重卡格局神龙标致伊朗-神龙汽车首创技术输出先河摩擦铝合金技术-搅拌摩擦焊的现状与发展(上)市场起重机海外-徐工起重机大举进入欧洲海外销1377台(图)弯曲工件卸料-弧形钣金件工艺与模具的改进设计融资企业增值税-增值税抵扣是否利好工程机械租赁业1、参数突然丢失(0MD系统)一台卧式加工中心在运行中出现930AL和CRT显示条形乱码,重新关机开机后所有参数丢失.然后在开机状态下输入参数机床可以正常运行.不知这是为什么?答:参数突然丢失,可能与存储板、电池或外部干扰有关,930也说明外部可能有干扰导致CPU工作不正常,出现系统报警。
也不排除主板或其他PCB故障。
2、926报警(18i)一加工中心出现了926报警,之后控制系统的LCD上除报警信息外,无任何显示(当时电控柜内温度较高),不知何故?答:926 报警(FSSB报警)原因和处理连接CNC和伺服放大器的FSSB(伺服串行总线)发生故障。
如果连接轴控制卡的FSSB,光缆和伺服放大器出现问题,就会发生此报警。
?? 确认故障位置使用伺服放大器上的LED判断。
使用伺服放大器上的7段LED可以确认故障的位置?? 伺服放大器的电源如果某个伺服放大器的电源出现故障,就发生FSSB报警。
由于放大故障器控制电源电压下降,或编码器电缆的+5V接地,或其他原因造成电源故障,引发FSSB报警。
?? 更换轴控制卡如果由以上措施诊断出轴控制卡存在故障,就更换主CPU板上的轴控制卡。
3、报警(0i mate-B)一台车床经常出现920,911,930报警,其中930最多,请提供技术支持.答:911 SRAM PARITY: (BYTE 1) 在部分程序存储RAM中发生奇偶校验错误。
发那科FANUC 0i系统故障报警信息
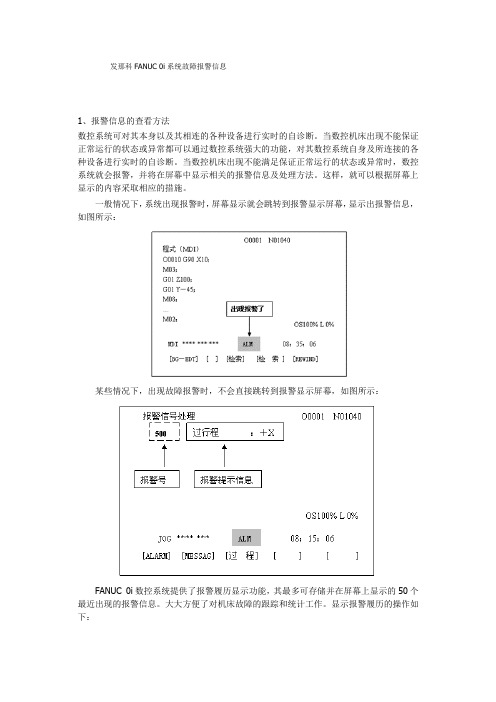
发那科FANUC 0i系统故障报警信息1、报警信息的查看方法数控系统可对其本身以及其相连的各种设备进行实时的自诊断。
当数控机床出现不能保证正常运行的状态或异常都可以通过数控系统强大的功能,对其数控系统自身及所连接的各种设备进行实时的自诊断。
当数控机床出现不能满足保证正常运行的状态或异常时,数控系统就会报警,并将在屏幕中显示相关的报警信息及处理方法。
这样,就可以根据屏幕上显示的内容采取相应的措施。
一般情况下,系统出现报警时,屏幕显示就会跳转到报警显示屏幕,显示出报警信息,如图所示:某些情况下,出现故障报警时,不会直接跳转到报警显示屏幕,如图所示:FANUC 0i数控系统提供了报警履历显示功能,其最多可存储并在屏幕上显示的50个最近出现的报警信息。
大大方便了对机床故障的跟踪和统计工作。
显示报警履历的操作如下:2、FANUC 0i数控系统报警的分类FANUC 0i数控系统的报警信息很多,可以归纳为以下类别,便于查找。
表7.1FANUC 0i数控系统报警分类3、常见报警的故障排除思路数控机床是当代高新技术机、电、光、气一体化的结晶,电气复杂,管路交叉林立,故障现象也是千奇百怪,各不相同。
如何能迅速找出故障、隐患,并及时排除?这是数控机床维修人员所面临的最现实、最直接的问题。
在这里,我们将以最常碰到的故障为例,学习使用FANUC 0i数控系统提供的丰富的维修功能进行故障排除的方法。
为方便起见,把由机床厂家根据不同的机床结构所可以预见的异常情况汇总后,由机床厂家自己编写错误代码和报警信息,这类故障称为外围报警(这是相对于数控系统而言)。
也就是说不同结构类型的机床就会有不同的外部故障的错误代码和报警信息。
而由数控系统生产厂家根据数控系统部件所能预见的异常情况汇总后,所编写的错误代码和报警信息,这类故障称为系统报警(数控系统故障)。
数控系统故障的错误代码和报警信息不会因不同结构类型的机床而改变,不同型号的数控系统的系统报警可能会有所不同。
数控机床无报警故障及排除

反向间隙产生的原因:在移动机械部件和传动部件(丝杠)
应的功率模块、接口板和电机,检查相应的连接件也正常,但故 时机械摩擦产生间隙,机械部件和测量系统之间也产生间隙。机
障依旧。
械安装了间接测量系统,机械运动反向,结果产生运动路径的恶
修改参数 4624(位控环增益),由原值 4000 改为 2000,虽有 化,引起轴多走或少走。
场没有原型号轴承(SKF 6216-Z/C3,C3 属于大游隙),改用其 支持解释为:在工频 380V,50Hz 对 1PH7 主轴伺服电机通电试
他型号轴承代替(FAG UN2216E-M1,M1 属于小游隙)。拉回电 车,可能会烧毁电机,必须在变频环境下进行。变频环境下试车,
机,安装、试车,电机振动噪声比安装前大,因生产任务紧,试运 电机温度稍高,噪声稍大,但较前一次明显好转。虽然故障未彻
XK8140A 数控万能工具铣床,西门子 802D 系统,出现铣圆
息,运用已经掌握的理论基础,进行分析判断。以下对有代表性 超差的现象,可明显看到铣出的圆有凸起。
的机床及数控系统,举例加以说明。
经观察发现有凸起的地方都是 X 和 Y 轴换向的位置,与反
1.机床振动
向间隙有关。打表测量 X 和 Y 轴反向间隙均是正方向补偿,即
该机床回参考点采用栅格方式,通过手动操作回参考点,过 床总电源,再拔掉 CP2、CP3 和 CP5 电缆,仅留 CP1(200V AC
程如下:先快速移动至挡块压上减速开关(开关采用常闭触点), 输入)和 CP4(操作面板上 POWER ON 和 POWER OFF 按钮,
机床就减速,离开减速开关后在最初的栅格点上停止,并点亮回 控制 PSU 单元上电与否),从底板上拔掉 PSU 单元,打开机床总
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发那科常见的无报警信息的故障排除诊断功能的使用数控系统发生故障后,如无报警信息,通过系统的诊断画面进行故障判断。
系统的诊断画面在机床出现异常时,诊断功能提供的报警信号和监控数据为故障判断提供了判断的依据。
利用诊断功能诊断故障如何有效地使用诊断功能提供的诊断信息来帮助查找和排除故障呢?这一定是我们最为关注的问题。
接着来学习如何使用诊断功能去解决一些在实际中经常出现的一些隐性故障。
(1)诊断号000为1时,表明系统正在执行辅助功能(M指令)。
在辅助功能的执行过程中,000号将会保持为1,直到辅助功能执行完了信号到达为止。
因此,当出现辅助功能执行时间超出正常值时,可能是辅助功能的条件未满足。
所以出现无报警的异常,查找故障点时,若诊断号000为1,可以首先检查辅助功能所要完成的机床动作是否已经完成。
故障现象:一数控机床在自动运行状态中,每当执行M8(切削液喷淋)这一辅助功能指令时,加工程序就不再往下执行了。
此时,管道是有切削液喷出的,系统无任何报警提示。
排除思路:调出诊断功能画面,发现诊断号000为1,也就是说系统正在执行辅助功能,切削液喷淋这一辅助功能未执行完成(在系统中未能确认切削液是否己喷出,而事实上切削液已喷出)。
于是,查阅电气图册,发现在切削液管道上装有流量开关,用以确认切削液是否已喷出。
在执行M8这一指令并确认有切削液喷出的同时,在PMC程序的信号状态监控画面中检查该流量开关的输入点X2.2而该点的状态为0(有喷淋时应为1),于是故障点可以确定为在有切削液正常喷出的同时这个流量开关未能正常动作所致。
因此重新调整流量开关的灵敏度,对其动作机构喷上润滑剂,防止动作不灵活,保证可靠动作。
在作出上述处理后,进行试运行,故障排除。
(2)诊断号003为1时,表明系统正在对移动后的伺服轴是否准确定位到指令值进行检查。
当伺服轴未能实现准确定位的话,将会出现诊断号003长期为1的情况出现。
故障现象:一数控机床在自动加工过程中,经常出现偷停现象。
特别是在Z 轴移动后,出现偷停现象比较多。
在出现此现象后,加工程序就不往下执行了,但可能几十秒后,加工程序又重新往下执行,有时又不行,机床就一直愣在那里没有发出任何的报警信息。
排除思路:在无任何报警信息的情况下,调出诊断功能画面,希望从中找到一点故障的线索。
在对诊断功能画面进行查看时发现,诊断号003正在进行到位检测,信号为1,于是查看诊断号为300的各伺服轴实时指令与实际位置偏差量,发现Z轴的实时指令与实际位置偏差量的值为50而定位的容许偏差值(到位宽度)是由参数1826设定的,也就是说只要诊断号为300的各伺服轴实时指令与实际位置偏差量不超过参数1826中所设定的值的话,系统就认为伺服轴的定位完成,否则的话系统认为伺服轴的定位未完成,于是就进行反复的定位,加工程序也就无法往下执行。
而这台机床在参数1826中,Z轴的到位宽度值是4,所以是Z轴的实际位置偏差量大于参数设定的到位宽度值,于是出现了此故障现象。
参数1825是各轴的伺服环增益,与位置偏差量的关系为:位置偏差量=进给速度/60×伺服环增益根据此公式,可以将Z轴的伺服环增益值适当减少,从而减少位置偏差量。
在对参数1825作出了适当的调整之后,Z轴的位置偏差量减少为1,即位置偏差量小于参数1826的设定值,故障排除。
(3)诊断号005为1时,表明系统正处于各伺服轴互锁或启动锁住信号被输入,该信号禁止机床各伺服轴移动。
机床所有的轴或各伺服轴未能满足移动条件,或者说是如果伺服轴移动的话将会有危险的情况出现。
当以下PMC的伺服轴互锁信号为0时,则机床进入伺服轴互锁状态,也就是禁止移动:G8.0(禁止所有伺服轴移动)6130.0(禁止系统定义的第一伺服轴移动)6130.1(禁止系统定义的第二伺服轴移动)6130.2(禁止系统定义的第三伺服轴移动)6130.3(禁止系统定义的第四伺服轴移动)6132.0(禁止系统定义的第一伺服轴正方向移动)6132.1(禁止系统定义的第二伺服轴正方向移动)6132.2(禁止系统定义的第三伺服轴正方向移动)G132.3(禁止系统定义的第四伺服轴正方向移动)6134.0(禁止系统定义的第一伺服轴负方向移动)6134.1(禁止系统定义的第二伺服轴负方向移动)G134.2(禁止系统定义的第三伺服轴负方向移动)6134.3(禁止系统定义的第四伺服轴负方向移动)故障现象:一数控加工专机在自动运行的过程中,当执行到G 90G01Z0;这一句程序时,出现无故停止的现象。
进行系统复位,再重新开始执行加工程序,也是执行到G 90G01Z0;这一句程序时,停止动作。
此时,也无任何的报警信息。
排除思路:在无任何报警信息的情况下,调出诊断功能画面,希望从中找到一点故障的线索。
在对诊断功能画面进行查看时发现,诊断号005系统正处于各伺服轴互锁或启动锁住信号被输入为1。
于是检查上述PMC的伺服轴互锁信号,发现6130.0为0,而Z轴是系统中定义的第一轴,查阅梯形图,看一看线圈示的报警状态进行故障具体原因的确定。
(11)750号报警,这是在串行主轴系统中通电时,主轴伺服模块没有达到正常的启动状态所引起的。
这时可使用诊断功能中诊断号409显示的报警状态进行故障具体原因的确定。
3、不能手轮运行如果手轮操作不能进行,可能有以下原因:伺服没有激活(没有准备好)。
手摇脉冲发生器没有正确的连接到内装的I/O接口或I/O模块上。
内装的I/O接口或I/O模块的I/OLink没有分配或没有正确分配。
由于参数设定错误使相关信号没有输入。
采取措施:1)检查伺服放大器上的LED显示是否为“0”。
如果显示“0”以外的数字,说明伺服没有激活,2)检查电缆是否断线或短路;3)检查手轮是否出现故障(手摇脉冲发生器信号是否正确)4)检查I/O模块的I/OLink分配5)检查参数和输入信号在CRT的左下角检查CNC的状态应在HND状态,否则,方式选择不正确。
进一步通过PMC的诊断功能(PMCDGN)查看方式选择:手轮方式为G0043“MD4=1,MD2=0,MD0= 0”检查手轮进给轴选择信号检查手轮进给倍率选择,PMC的PCDGN来确认信号:G0019 MP2和MP1位。
分度工作台的分度轴手脉的进给不能执行。
130.0未能接通的原因,最后发现是刀塔抬起/落下的检测接近开关的状态同时为1,检查发现刀塔实际上是落下到位了,而抬起检测的接近开关因为沾有铁屑,而发出误信号,于是PMC程序判定Z轴的安全移动条件未满足。
清理了该接近开关以后,线圈6130.0置1,Z轴的互锁状态解除,故障排除。
(4)350号报警,这是a串行脉冲编码器内的控制部分发生异常所引起的。
这时可使用诊断功能中诊断号202和204显示的报警状态进行故障具体原因的确定。
(5)351号报警,这是a串行脉冲编码器与模块之间的通信发生异常所引起的。
这时可使用诊断功能中诊断号203显示的报警状态进行故障具体原因的确定。
(6)400号报警,这是系统检测出伺服模块或者伺服电动机过热所引起的。
这时可使用诊断功能中诊断号为200和201显示的报警状态进行故障具体原因的确定。
(7)414号报警,这是伺服模块或者伺服电动机发生异常所引起的。
这时可使用诊断功能中诊断号200,201和204显示的报警状态,以及伺服模块上的LED 所显示的报警号进行故障具体原因的确定。
(8)416号报警,这是位置检测器的信号断线或短路所引起的。
这时可使用诊断功能中诊断号200和201显示的报警状态进行故障具体原因的确定。
(9)417号报警,这是系统伺服参数设定异常所引起的。
这时可使用诊断功能中诊断号203和280显示的报警状态进行故障具体原因的确定。
(10)749号报警,这是主轴伺服模块部分发生异常所引起的。
这时可使用诊断功能中诊断号408显示的报警状态进行故障具体原因的确定。
(11)750号报警,这是在串行主轴系统中通电时,主轴伺服模块没有达到正常的启动状态所引起的。
这时可使用诊断功能中诊断号409显示的报警状态进行故障具体原因的确定。
3、不能手轮运行如果手轮操作不能进行,可能有以下原因:伺服没有激活(没有准备好)。
手摇脉冲发生器没有正确的连接到内装的I/O接口或I/O模块上。
内装的I/O接口或I/O模块的I/OLink没有分配或没有正确分配。
由于参数设定错误使相关信号没有输入。
采取措施:1)检查伺服放大器上的LED显示是否为“0”。
如果显示“0”以外的数字,说明伺服没有激活,2)检查电缆是否断线或短路;3)检查手轮是否出现故障(手摇脉冲发生器信号是否正确)4)检查I/O模块的I/OLink分配5)检查参数和输入信号在CRT的左下角检查CNC的状态应在HND状态,否则,方式选择不正确。
进一步通过PMC的诊断功能(PMCDGN)查看方式选择:手轮方式为G0043“MD4=1,MD2=0,MD0= 0”检查手轮进给轴选择信号检查手轮进给倍率选择,PMC的PCDGN来确认信号:G0019 MP2和MP1位。
分度工作台的分度轴手脉的进给不能执行。