二级倒立摆系统的控制与仿真
二级倒立摆系统的最优控制
∞
ut
+
B
+
1 /S
x
C
y
A
R-1BT
P
五、仿真分析
将某二级倒立摆系统模型各参数代入式1-8,得出系数矩阵 设, 写出Matlab程序如下:
A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1; 0,-2.57163,0.164291,-16.6674,0.0124145,0.005; 0,29.9499,-15.1957,40.3167,-0.204856,0.17380; 0,29.9499,65.4455,-49.3949,0.463474,-0.59148]; B=[0;0;0;8.64636;-20.9146;25.9146]; C=[1 0 0 0 0 0;0 1 0 0 0 0;0 0 1 0 0 0];D=[0;0;0]; %求开环特征值 r1=eig(A) %加入最优反馈器 q1=100;q2=10;q3=5000;q4=0;q5=0;q6=0; Q=[q1 0 0 0 0 0;0 q2 0 0 0 0;0 0 q3 0 0 0;0 0 0 q4 0 0;0 0 0 0 q5 0;0 0 0 0 0 q6];R=1; %求最优增益矩阵、黎卡提方程的解、闭环特征值 [K,P,r2]=lqr(A,B,Q,R) Ac=[(A-B*K)];Bc=[B];Cc=[C];Dc=[D]; T=0:0.02:20;U=zeros(size(T)); x0=[0;-0.05;0.1;0;0;0]; [Y,X]=lsim(Ac,Bc,Cc,Dc,U,T,x0); %绘制下摆偏离垂直方向的角度变化曲线 figure(1);plot(T,Y(:,1)); xlabel('Time/sec');ylabel('01/rad');grid; %绘制上下摆角度之差的曲线 figure(2);plot(T,Y(:,2)); xlabel('Time/sec');ylabel('02-01/rad');grid; %绘制小车位移曲线 figure(3);plot(T,Y(:,3)) xlabel('Time/sec');ylabel('x(小车)/m');grid;
平面二级倒立摆系统仿真
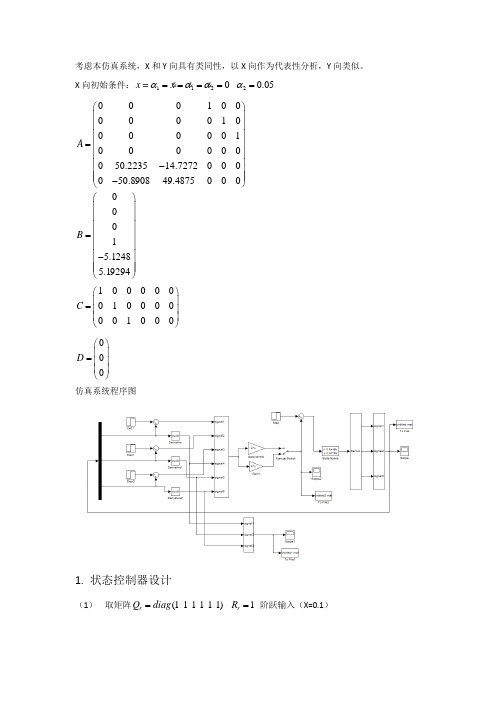
考虑本仿真系统,X 和Y 向具有类同性,以X 向作为代表性分析,Y 向类似。
X 向初始条件:1120x=x ααα====20.05α=00100000010000001000000050.223514.7272000050.890849.4875000A ⎛⎫⎪⎪ ⎪=⎪ ⎪ ⎪- ⎪⎪-⎝⎭00015.12485.19294B ⎛⎫ ⎪⎪ ⎪= ⎪ ⎪ ⎪- ⎪ ⎪⎝⎭100000010000001000C ⎛⎫⎪= ⎪ ⎪⎝⎭000D ⎛⎫ ⎪= ⎪ ⎪⎝⎭仿真系统程序图1. 状态控制器设计(1) 取矩阵(111111)1r r Q diag R == 阶跃输入(X=0.1)得[1.0000 13.4672 95.6968 2.3975 10.7845 15.9971]r K =状态曲线图(黄色代表X ,紫色代表1α,绿色代表2α)状态的一阶导数曲线(黄色代表X ,紫色代表1α,绿色代表2α)u 的曲线12250%70.450.70.62s t s x u σαα==≤≤≤≤结果:指标不理想(2) 取矩阵(20011111)1r r Q diag R == 阶跃输入(X=0.1) 得[14.1421 64.9555 166.3031 14.7223 25.4912 28.8348]r K =状态曲线图(黄色代表X ,紫色代表1α,绿色代表2α)状态的一阶导数曲线(黄色代表X ,紫色代表1α,绿色代表2α)u 的曲线1260%20.4 1.00.8 2.8s t s x u σαα==≤≤≤≤结果:指标有改善,需要细致调整。
(3) 取矩阵(111111)10r r Q diag R == 阶跃输入(X=0.1) 得[0.3162 6.1247 81.2826 1.0619 8.3252 13.4153]r K =状态曲线图(黄色代表X ,紫色代表1α,绿色代表2α)状态的一阶导数曲线(黄色代表X ,紫色代表1α,绿色代表2α)u 的曲线12460%100.450.70.62s t s x u σαα=≥≤≤≤≤结果:指标变差,调整r R 破坏了性能指标。
直线二级倒立摆系统MATLAB模型的建立与仿真
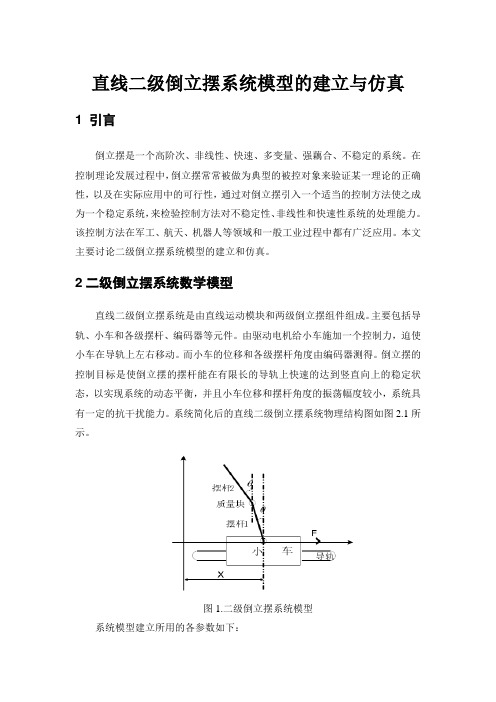
直线二级倒立摆系统模型的建立与仿真1 引言倒立摆是一个高阶次、非线性、快速、多变量、强藕合、不稳定的系统。
在控制理论发展过程中,倒立摆常常被做为典型的被控对象来验证某一理论的正确性,以及在实际应用中的可行性,通过对倒立摆引入一个适当的控制方法使之成为一个稳定系统,来检验控制方法对不稳定性、非线性和快速性系统的处理能力。
该控制方法在军工、航天、机器人等领域和一般工业过程中都有广泛应用。
本文主要讨论二级倒立摆系统模型的建立和仿真。
2二级倒立摆系统数学模型直线二级倒立摆系统是由直线运动模块和两级倒立摆组件组成。
主要包括导轨、小车和各级摆杆、编码器等元件。
由驱动电机给小车施加一个控制力,迫使小车在导轨上左右移动。
而小车的位移和各级摆杆角度由编码器测得。
倒立摆的控制目标是使倒立摆的摆杆能在有限长的导轨上快速的达到竖直向上的稳定状态,以实现系统的动态平衡,并且小车位移和摆杆角度的振荡幅度较小,系统具有一定的抗干扰能力。
系统简化后的直线二级倒立摆系统物理结构图如图2.1所示。
图1.二级倒立摆系统模型系统模型建立所用的各参数如下:应用Lagrange 方程建立的数学模型为012221221211121221222212212222cos (,)cos()cos cos()1121111121111m +m +m (m l +m L )cos m l H (m l +m L )cos J m l m L m l L m l m l L J m l θθθθθθθθθθ⎡⎤⎢⎥=++-⎢⎥⎢⎥-+⎣⎦.1011...1221212122.11222cos (,,,)0(0(112222222f m l +m L sin m l H f f m l L sin f m l L sin f f θθθθθθθθθθθθθ⎡⎤-•⎢⎥⎢⎥=--•+⎢⎥⎢⎥-•+-⎢⎥⎣⎦111()-)-) 312(,)h θθ= [0 11211()sin m l m L g θ+ 212sin m l g θ] T0h =[1 0 0]T()1121212121312022(,)(,,,),x x H H h h u θθθθθθθθθθθθ⎡⎤⎡⎤⎢⎥⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦3 倒立摆PID控制器系统PID控制是比例积分微分控制的简称。
二级直线倒立摆系统建模、仿真与实物控制的开题报告
二级直线倒立摆系统建模、仿真与实物控制的开题报告一、选题背景及意义直线倒立摆系统是一种应用广泛的控制系统,它具有复杂的非线性特性,因此对其建模、控制和仿真都具有一定的挑战性。
直线倒立摆系统广泛应用于自动驾驶、飞行器、医疗器械等领域。
本文将研究二级直线倒立摆系统的建模、仿真与实物控制,以提高对该系统的理解和掌握。
通过实验控制实际系统,验证仿真模型的正确性并提高控制策略的可靠性与性能。
二、研究内容1.二级直线倒立摆系统的建模研究系统的动力学特性,建立数学模型,包括机械、电子等方面的模型,并给出系统的描述方程。
2.仿真系统的设计与实现通过MATLAB或Simulink等工具,根据系统的动力学模型进行仿真,分析系统的动态特性,验证模型的正确性。
3.实物系统的设计与实现根据建模结果,设计实物系统,包括硬件和软件,搭建实验环境,并选取合适的控制器,使用反馈控制算法对实验数据进行处理。
4.实物控制系统的测试与优化将实验得到的数据进行分析、处理和优化,比较实物系统和仿真系统的差异并给出改进方案,从而提高系统的动态响应特性和控制性能。
三、研究方法及预期结果本文将采用系统分析、数学建模、仿真分析、控制器设计和优化等方法,通过建模、仿真、实物控制等多个方面去了解直线倒立摆系统。
预期结果是建立二级直线倒立摆系统的模型,完成仿真和实验的设计与实现,控制系统实现稳定的控制策略,并得出实物系统和仿真系统的控制性能优化方案。
四、进度安排第一阶段:文献综述和理论研究,研究直线倒立摆控制系统的基本原理和方法。
(2周)第二阶段:根据文献进行仿真研究,建立稳定的仿真模型。
(2周)第三阶段:设计实物控制系统,搭建实验环境。
(2周)第四阶段:实现控制系统与优化,得出实验数据并进行分析和优化,提高系统的控制性能。
(2周)第五阶段:撰写论文和答辩。
(4周)五、预期成果本文通过对二级直线倒立摆系统的建模、仿真和实物控制的研究,完成了对系统的深入理解和掌握,得出了系统的优化控制方案。
二级倒立摆系统的最佳控制
H(K) 为 最 佳 反 馈 阵 , 即 最 佳 状 态 调 节 器 , 以
H(K)表示。
X(K+1)=(Ad-BdH)X(K)=(Ad-BdR-1BdTP
(I+BdR-1BdTP)-1Ad)X(K)
(7)
令Ad=Ad-BdR-1BdTP(I+BdR-1BdTP)-1Ad
(8)
则X(K+1)=AdX(K)
参考文献:
0.6 0.4 0.2 0 -0.2 -0.4 -0.6 系列 1
1 0.5 0 -0.5 -1 方位跟踪误差 0.16mil 系列 2 高低跟踪误差 0.10mil
图 3 截取自动跟踪数据
[1] Furuta K, Ochiai T, Ono N. Altitude Control A Triple Inverted Pendulum [J]. Int. J. Control, 1984, 39 (6): 1351-1365.
2563制量调节波门从而实现随目标特征变化波门的自动调节调节波门之后波门内部图像的平均亮度特征更接近于目标的亮度特征有助于目标的稳定识别启动鼠标导引功能一段时间之后控制流程切出鼠标导引控制进入其他的图像处理和跟踪控制流程以红外跟踪为例部分控制流程如图发现目标半自动跟踪目标红外跟踪部分控制流程示意图红外是否可靠提取目标用操纵杆将目标拉到屏幕中心区域后切换自动启动鼠标导引和自适应阈值波门并控制图像处理进入相应处理流程延时一段时间本例20帧图像时间切出鼠标导引输出跟踪信息分割识别阈值目标亮度值等自动跟踪目标进入激光测程后启动激光测距结束输出跟踪状态目标截获信号输出目标距离红外截获目标是否有效目标亮度值是否低于图像最低分割阈值自动跟踪目标进入激光测程后启动激光测距输出跟踪状态目标截获信号输出目标距离试验分析该自适应控制方法适用于复杂背景下目标特别是弱小目标的稳定跟踪在多云的复杂背景下24km左右的弱小目标实施跟踪和数据采集截取自动跟踪部分数据绘制方位高低跟踪误差曲线如图所示由方位高低的跟踪误差曲线图和计算所得的跟踪误差可以看到基于图像处理自适应阈值跟踪波门技术和鼠标导引功能的跟踪控制流程在实际跟踪控制中的跟踪效果是很稳定的有效的051060402020406系列1方位跟踪误差016mil系列2高低跟踪误差010mil结论采用自适应阈值跟踪波门技术鼠标导引功能和自适应控制方法恰当地设计控制流程在复杂背景下对目标的跟踪效果得到了很大提高特别是对复杂背景中弱小目标的跟踪稳定效果显著参考文献胡保安
直线二级倒立摆建模与matlab仿真LQR
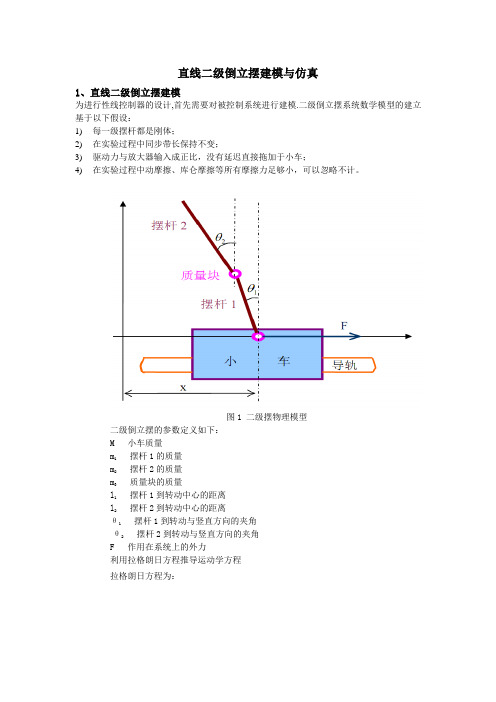
直线二级倒立摆建模与仿真1、直线二级倒立摆建模为进行性线控制器的设计,首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立基于以下假设:1)每一级摆杆都是刚体;2)在实验过程中同步带长保持不变;3)驱动力与放大器输入成正比,没有延迟直接拖加于小车;4)在实验过程中动摩擦、库仑摩擦等所有摩擦力足够小,可以忽略不计。
图1 二级摆物理模型二级倒立摆的参数定义如下:M 小车质量m1摆杆1的质量m2摆杆2的质量m3质量块的质量l1摆杆1到转动中心的距离l2摆杆2到转动中心的距离θ1摆杆1到转动与竖直方向的夹角θ2摆杆2到转动与竖直方向的夹角F 作用在系统上的外力利用拉格朗日方程推导运动学方程拉格朗日方程为:其中L 为拉格朗日算子,q 为系统的广义坐标,T 为系统的动能,V 为系统的势能其中错误!未找到引用源。
,错误!未找到引用源。
为系统在第i 个广义坐标上的外力,在二级倒立摆系统中,系统有三个广义坐标,分别为x,θ1,θ2,θ3。
首先计算系统的动能:其中错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
分别为小车的动能,摆杆1的动能,摆杆2的动能和质量块的动能。
小车的动能:错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆1的平动动能和转动动能。
错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆2的平动动能和转动动能。
对于系统,设以下变量: xpend1摆杆1质心横坐标 xpend2摆杆2质心横坐标 yangle1摆杆1质心纵坐标 yangle2摆杆2质心纵坐标 xmass 质量块质心横坐标 ymass 质量块质心纵坐标 又有:(,)(,)(,)L q q T q q V q q =-则有:系统总动能:系统总势能:则有:求解状态方程:可解得:使用MATLAB对得到的系统进行阶跃响应分析,执行命令:A=[0 0 0 1 0 0;0 0 0 0 1 0;0 0 0 0 1 01;0 0 0 0 0 0;0 86.69 -21.62 0 0 0;0 -40.31 39.45 0 0 0];B=[0;0;0;1;6.64;-0.808];C=[1 0 0 0 0 0;0 1 0 0 0 0;0 0 1 0 0 0];D=[0;0;0];sys=ss(A,B,C,D);t=0:0.001:5;step(sys,t)求取系统的单位阶跃响应曲线:图2 二级摆阶跃响应曲线由图示可知系统小车位置、摆杆1角度和摆杆2角度均发散,需要设计控制器以满足期望要求。
毕业设计 二级倒立摆建模

四川理工学院毕业设计(论文)二级倒立摆系统建模与仿真学生:学号:专业:自动化班级:自动化指导教师:四川理工学院自动化与电子信息学院二O一一年六月摘要常规的PID控制从理论上可以控制二级倒立摆,但在实际中对PID控制器参数的整定为一难点。
本文针对二级倒立摆系统单输入三输出的不稳定系统,通过三回路PID 控制方案,来完成对倒立摆的控制。
利用状态反馈极点配置的方法来对参数进行整定,解决PID参数整定的难点。
然后借助于MATLAB中的Simulink模块对所得的参数进行仿真,结果表明三回路PID控制是成功的,参数的有效性,也证实了这种参数整定方法简单实用。
并通过配置不同位置的极点,对其结果进行分析得到极点配置的最佳配置方案。
关键词:倒立摆;PID;状态反馈; MATLABABSTRACTDouble Inverted Pendulum System Modeling and SimulationConventional PID control theory to control the inverted pendulum, but in practice the parameters of PID controller tuning is a difficult. In this paper, double inverted pendulum system, the instability of single-input three-output system, through the three-loop PID control program to complete the inverted pendulum control.Pole placement using state feedback approach to setting the parameters to resolve the difficulties PID parameter tuning. With MATLAB and Simulink in the module parameters obtained from simulation results show that the three-loop PID control is successful, the effectiveness of the parameters, but also confirms this tuning method is simple and practical.Different locations through the pole configuration, the results were too extreme configuration of the best configuration.Key words:pendulum;PID control ;state feedback;MATLAB目录摘要............................................................... ABSTRACT (I)第1章引言 01.1 倒立摆研究的目的及意义 01.2 倒立摆的发展史和研究现状 01.3本文的主要工作 (3)第2章倒立摆的建模 (3)2.1 二级倒立摆的简介及物理模型 (3)2.2 二级倒立摆计算机控制系统结构 (4)2.3 二级倒立摆的数学模型 (5)2.4根据牛顿力学、刚体动力学列写二级倒立摆的数学模型 (6)第3章控制策略的选择 (11)3.1 MATLAB简介 (11)3.2该系统的能控、能观及稳定性的分析 (14)3.2.1系统的能控性 (14)3.2.2系统能观性 (16)3.2.3系统的稳定性 (16)3.3 确定控制策略 (17)3.4 控制器参数整定方法 (17)3.5 通过状态反馈极点配置法来整定参数 (19)第4章计算机仿真及结果分析 (22)4.1 Matlab下Simulink模块简介 (22)4.2 在Simulink下的仿真 (23)4.3对仿真结果的分析 (31)第5章结束语 (32)致谢 (33)参考文献 (34)第1章引言1.1 倒立摆研究的目的及意义在控制理论发展的过程中, 一种理论的正确性及在实际应用中的可行性,往往需要一个典型对象来验证, 并比较各种控制理论之间的优劣, 倒立摆系统就是这样的一个可以将理论应用于实际的理想实验平台。
小车二级摆系统的摆起倒立控制与实践

Tel: 86-23-68660251; Fax: 86-23-68660251, E-mail: zushuli@
摘 要 运用仿人智能控制(HSIC)理论的方法,研究了一类典型非线性欠驱动不稳定系统—小车二级摆系统(CDPS)的摆起 倒立稳定控制问题。通过对 CDPS 运动的物理过程分析,模仿人控制器的特点,规划设计了 CDPS 的 HSIC 控制器的动觉智能图 式。在摆起倒立过程中,HSIC 控制器通过对两级摆杆间运动姿态特征的感知和基于特征识别的多模态控制,使 CDPS 两级摆杆 之间始终具有较小的相对运动趋势和较小的相对角度差,成为一个动态的“拟小车单摆”系统。仿真实验和实际系统的摆起倒立 成功验证了该方法的有效性。 关键词 小车二级摆系统,摆起倒立控制,仿人智能控制,动觉智能图式
或
E0 ⎯控⎯制⎯作⎯用→ ET
q& = (x&,θ&1,θ&2 ) ,根据动力学分析,可得出小车二级摆运
动模型如下:
M (q) q&&+ C(q, q&) q&+ g(q) = F
(1)
y
l2
θ2
m2
l1
θ1 m0
m1
M x
图 1 小车二级摆
⎡ A11 A12 A13 ⎤
M
(q)
=
⎢ ⎢
A21
A22
心理学中描述人智力模块的图式(schema)概念同仿人智 能控制理论相结合,认为复杂运动控制系统与人体运动 控制系统一样,其控制器应具有通过反复学习实践而形 成的“内部模型”,即由“动觉智能图式”构成的系统运 动计划和决策的参照系。
直线二级倒立摆的控制问题的研究和matlab仿真毕业设计说明书 精品推荐
直线二级倒立摆的控制问题的研究和matlab仿真摘要倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的高阶不稳定系统,它是检验各种新型控制理论和方法有效性的典型装置。
近年来,许多学者对倒立摆系统进行广泛地研究。
本文研究了直线二级倒立摆的控制问题。
首先阐述了倒立摆系统控制的研究发展过程和现状,接着介绍了倒立摆系统的结构并详细推导了二级倒立摆的数学模型。
本文分别用极点配置、LQR最优控制设计了不同的控制器,通过比较和MATLAB仿真,验证了所设计的控制器的有效性、稳定性和抗干扰性。
关键词: 倒立摆;极点配置;最优控制; MATLAB;仿真ABSTRACTInverted pendulum is a typical multi-variable, non-linear, strong coupling and rapid movement of high-end system instability, It is testing various new control theory and methods of the effectiveness of the typical devices. In recent years, many scholars of the inverted pendulum extensive study.In this paper, a straight two inverted pendulum control problem.First on the inverted pendulum control of the development process and the status quo, then introduced the inverted pendulum system and the detailed structure of the two inverted pendulum is derived a mathematical model. In this paper, with pole placement, LQR optimal control design a different controller, By comparing and MATLAB simulation, verified the effectiveness ,stability and anti-jamming of the controller.Key words:Inverted pendulum;Pole Assignment;Optimal Control;MATLAB;Simulation目录摘要 (1)ABSTRACT (2)第一章绪论 (5)1.1 控制理论的发展 (5)1.2 倒立摆系统简介及其研究意义 (5)1.3 倒立摆研究的发展现状及其主要控制方法 (7)1.4 本人所做工作 (8)第二章直线二级倒立摆数学模型的建立 (10)2.1 倒立摆系统的物理结构及特性分析 (10)2.2 系统的数学建模 (11)2.2.1 两种数学建模方法的比较 (11)2.2.2 系统数学建模参数的设定 (12)2.2.3 直线二级倒立摆的拉格朗日方程建模 (13)2.2.4 二级倒立摆系统数学模型的线性化 (17)2.3 系统参数的设定 (19)2.4 倒立摆系统的初步运动分析 (20)第三章直线二级倒立摆控制方案的设计 (22)3.1极点配置控制方案的设计 (22)3.1.1 极点配置理论 (22)3.1.2 极点配置算法 (23)3.2 线性二次型最优控制(LQR)方案的设计 (24)3.2.1 线性二次型最优控制原理 (24)3.2.2 Q, R阵的选择 (26)第四章控制系统的MATLAB仿真 (27)4.1 仿真软件的介绍 (27)4.1.1 MATLAB简介 (27)4.1.2 MATLAB7.0简介 (28)4.1.3 Simulink 6.0仿真工具箱简介 (29)4.2 无干扰控制系统的仿真 (30)4.2.1 极点配置控制方案的仿真 (32)4.2.2 线性二次型最优控制(LQR)方案的仿真 (36)4.3 干扰条件下控制系统的仿真 (40)4.3.1 极点配置控制方案的仿真 (42)4.3.2 线性二次型最优控制(LQR)方案的仿真 (45)结论 (50)致谢 (52)参考文献 (53)第一章绪论1.1 控制理论的发展控制理论发展至今已有100多年的历史,随着现代科学技术的发展,它的应用也越来越广泛。
二级倒立摆PD控制毕业答辩

x 0
0
0 1 0 0x 0
1 2 x
0 0 0
0 0 0
0
0
1
0
1
0
0 0
0 0
0 0
1 0
x2
0 1
F
1
2
0 0
• 为了了解配置的极点对控制效果的影响在众多组极点中取 了4组极点一组位于实轴上、其他3组为共轭复数,极点配 置及相应的反馈矩阵如下表
表4-1 4组极点配置与相应的反馈矩阵
5.仿真
Simulink下的仿真
• 仿真后各组的结果如下各图
a组仿真结果
• b组仿真曲线
C组曲线 d组曲线
结果分析
• (1)三回路PD控制能有效的控制二级倒立摆直 立和小车稳定时的位置,通过极点配置的方法来 整定参数是可行的,是简单有效的。
谢谢
何安林 二级倒立摆系统建模与仿真
1.倒立摆的发展及现状
• 在20世纪60年代人们就开始了对倒立摆的研究。由于倒立 摆的高阶次、非线性、快速、多变量、强藕合、不稳定特 性,现代控制理论研究人员一直用它来描述非线性控制领 域中的无源性控制、变结构控制、非线性模型降阶、自由 行走、非线性观测器等控制思想和对线性控制领域中不稳 定系统的稳定性研究,不断从中发掘出新的控制方法和控
• 根据牛顿力学列写二级倒立摆的数学模型 根据力学中的隔离法将二级倒立摆分为小车、摆杆1、摆 杆2分别对受力进行分析得出运动学和力学方程分别如下 图
Y
N
X
F
F F12 m0 x
(2-1)
F12
F11
图2-1 小车的受力分析
二级倒立摆数学模型的建立与仿真培训资料
二级倒立摆数学模型的建立与仿真二级倒立摆数学模型的建立与仿真专业:控制工程姓名:淡丹学号:1406073摘要本文用分析力学中牛顿力学法及拉格朗日方程建立了二级倒立摆的数学模型。
根据已经建立的倒立摆数学模型,对其进行了可控性,可观测性及稳定性的分析与研究,并对状态反馈及状态观测器进行了仿真模拟,分析研究。
并通过分析比较得出,加状态观测器并不影响系统的输出的结论。
关键词:倒立摆状态空间极点配置状态反馈ABSTRACTNewtonian mechanics analysis method and the Lagrange equation of a mathematical model of double inverted pendulum has been used in this paper. According to the established mathematical model of inverted pendulum on the controllability, observability and stability of the analysis and research, and the state observer and state feedback is carried on the simulation ,analysis and research. And through the analysis and comparison of results, plus state observer does not affect the conclusions of the output of the system.KEY WORDS: inverted pendulum state space pole allocation state feedback一、二级倒立摆系统的组成二级倒立摆主要由以下四部分组成:1.在有限长的轨道L上作直线运动的小车;2.与小车铰接在一起,并能在竖直平面内分别绕q,q点转动的下、上摆;3.驱动小车的直流力矩电机和转轮、钢丝等传动部分;4.使上、下摆稳定在垂直向上的平衡位置,且使小车稳定在轨道中心位置附近的控制器。
倒立摆系统的控制算法及仿真
倒立摆系统的控制算法及仿真1.1 倒立摆控制算法1.1.1 倒立摆控制算法概述单级倒立摆的稳定控制,实际上是一单输入多输出系统的稳定控制。
此时系统输入是电机控制电压u,输出是倒立摆竖直方向角度θ和旋臂位置ϕ。
对方程(2.5)进行变形即得θ与u 之间的输入输出方程,很明显,它是一个不稳定的二阶系统。
控制倒立摆使之稳定的方法很多,当前已有的倒立摆控制规律可总结为:(1)PID控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出其非线性模型,再在平衡点处进行线性化得到倒立摆系统的状态方程和输出方程,于是就可设计出PID控制器实现其控制;(2)状态反馈H∞控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出状态方程和输出方程,于是就可应用H∞状态反馈和Kalman 滤波相结合的方法,实现对倒立摆的控制;(3)利用云模型实现对倒立摆的控制,用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。
这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题;(4)神经网络控制,业已证明神经网络(NeuralNetwork ,NN) 能够任意充分地逼近复杂的非线性关系,NN 能够学习与适应严重不确定性系统的动态特性,所有定量或定性的信息都等势分布贮存于网络内的各种神经元,故有很强的鲁棒性和容错性,也可将Q学习算法和BP神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制;(5)遗传算法( Genetic Algorithms , GA),高晓智在Michine 的倒立摆控制Boxes 方案的基础上,利用GA 对每个BOX 中的控制作用进行了寻优,结果表明GA可以有效地解决倒立摆的平衡问题;(6)自适应控制,主要是为倒立摆设计出自适应控制器;(7)模糊控制,主要是确定模糊规则,设计出模糊控制器实现对倒立摆的控制;(8)使用几种智能控制算法相结合实现倒立摆的控制,比如模糊自适应控制,分散鲁棒自适应控制等等,(9)采用GA 与NN 相结合的算法,首先建立倒立摆系统的数学模型,然后为其设计出神经网络控制器,再利用改进的贵传算法训练神经网络的权值,从而实现对倒立摆的控制,采用GA 学习的NN 控制器兼有NN 的广泛映射能力和GA 快速收敛以及增强式学习等性能。
模糊趋近律滑模变结构的二级倒立摆系统控制仿真
0 引言
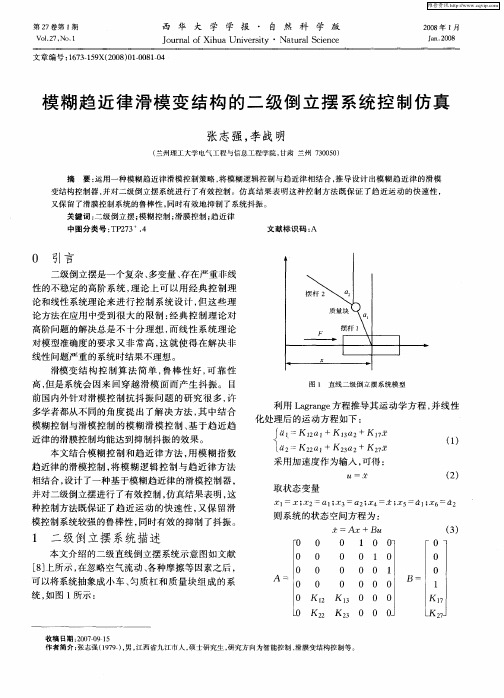
二 级倒立 摆是 一个 复杂 、 多变 量 、 在严 重 非线 存
性 的不稳 定 的高 阶系 统 , 论 上 可 以用 经 典 控 制 理 理
论 和线性 系统 理论 来 进 行 控制 系统 设 计 , 这 些 理 但 论 方法 在应用 中受 到 很 大 的 限制 : 经典 控 制 理 论 对
J1 2 1 32 =K1 +K1 +K1 a a 7 .  ̄
: K 2 以1 K 2 以2+ K2 2 + 3 7
()
,、
趋近律 的滑模控 制 , 模糊 逻 辑 控 制 与 趋 近律 方 法 将
相结 合 , 计 了一种 基于模 糊趋 近律 的滑 模控 制器 , 设
采用 加速度 作 为输入 , 可得 :
『 ,
~
4 l 一 ( 1 3 +m3 ) 2 m22 +( m2 ) z
K
『 ,
一
因为 志和 e都 是正数 , 可知 <O 所 以采 用式 , (1 的控 制律 , 1) 倒立 摆 系统滑 动模 态存 在且 可达 。 根据 式 ( ) 知 , l 较 大 时 , 取 大 的 e值 9可 在 I S 选 和小 的 志, 近速度 快 , 趋 当接 近滑 模 面 即 s O时 , — 则 一 O 此时 的趋 近速度 则 由 e n S决 定 , 此 时 e , s () g 若 不趋 近于 零 , 系统将会 来 回穿越 滑模 面产 生抖 振 , 而 且抖振 的强度 由 e的 大小 决 定 。 由于 滑模 面 S是 关于状 态 变量 的 函数 , 因此可 以根 据 S 的值来 实 时 的调 整参 数 e 使系 统具 有更 好 的性 能 。将式 ( ) , 9 表
“= () 2
并对 二级倒 立摆 进行 了有效 控 制 , 真结 果表 明 , 仿 这 种控 制方 法既保证 了趋 近 运 动 的 快 速性 , 又保 留滑 模控制 系统 较强 的鲁棒 性 , 同时有 效 的抑制 了抖振 。
基于直线二级倒立摆系统的可拓控制仿真研究的开题报告

基于直线二级倒立摆系统的可拓控制仿真研究的开题报告摘要:本文基于直线二级倒立摆系统,通过控制量可拓控制技术,实现了系统的可拓控制和仿真。
首先,介绍了直线二级倒立摆系统的基本结构和数学模型。
然后,介绍了可拓控制技术的基本原理和实现方法。
接着,设计了可拓控制器,并利用MATLAB进行了仿真实验。
仿真结果表明,可拓控制技术能够有效地控制直线二级倒立摆系统,提高了系统的稳定性。
关键词:直线二级倒立摆系统;可拓控制技术;仿真研究一、研究背景及意义随着现代科技的发展,控制系统的应用越来越广泛,尤其是在工业生产、交通运输等领域。
直线二级倒立摆系统是一种具有非线性、强耦合和不稳定等特点的动态系统,其控制一直是控制领域的研究热点。
因此,研究直线二级倒立摆系统的控制问题,具有重要的理论及实际意义。
近年来,可拓控制技术被广泛应用于控制系统中。
作为一种新型的控制理论,它在动态控制、智能控制、网络控制、多智能体系统等领域中都取得了一定的研究成果。
相较于传统的控制技术,可拓控制技术能够实现系统的鲁棒控制、容错控制等特性,具有更好的控制效果和控制能力。
因此,将可拓控制技术应用于直线二级倒立摆系统的控制中,可以提高控制器的鲁棒性和容错性,增强系统的稳定性和性能,具有一定的研究和应用价值。
二、研究内容本文主要研究基于直线二级倒立摆系统的可拓控制技术,实现系统的可拓控制和仿真。
研究内容包括以下几个方面:1、直线二级倒立摆系统的控制模型建立。
通过对系统结构和动力学模型的分析,建立系统的数学模型,并对模型进行分析和求解。
2、可拓控制技术的理论研究。
介绍可拓控制技术的基本原理和实现方法,并分析其在直线二级倒立摆系统中的应用。
3、系统的控制器设计。
根据可拓控制技术的原理,设计直线二级倒立摆系统的可拓控制器,并对控制器进行仿真和测试,验证控制器的有效性和性能。
4、仿真实验和结果分析。
利用MATLAB进行仿真实验,并对仿真结果进行分析和比较,验证可拓控制技术在直线二级倒立摆系统中的应用效果。
二级倒立摆数字控制器仿真设计

题, 运用现代控制理论 , 并以 M tb aa 语言为辅助工具 , l 在计算机上进行二级倒立摆数字控制器的分
析 与设计 . 通过 对二级倒 立摆数 字最优 控制 器和 降阶观 测 器的设 计 , 系统 的稳 定性 和 性 能指 标达 使
统作为控制对象 , 运用现代控制理论 , 以 M T A 并 A LB
语言 为辅 助设计 工具 , 计 算机 上 进行 二 级倒 立 摆 在 数字控 制器 的分 析与设 计.
V I2 N . o_ 3 o1 Fb 0 8 e .2 0
20 0 8年 2月
文章编号 :04—17 (0 8 0 - 0 6— 4 10 4 8 20 ) 1 0 9 0
二级倒立摆数字控制 器仿真设计
牛 月兰 , 冯巧玲 , 吴 娟
( 郑州轻 _业 学院 电气信 息_ 程学 院,河 南 郑州 400 ) T - T - 50 2
hv a a it,m lcnrl o meadso dut n m . aeh ds bly s a ot l n hr a js t i e t i l ov u t me t Ke o d :o beivr dp n uu d t ot l rrd cdod r bevr yw rs d u l ne e e d lm;i a cnr l ; u e —re s e t i g l oe e o r
t e r s v r f cie B s f d m o t l e r n t i e e in t os t e d u l n e e h o i e ef t . yu e o y y e v mo e c n r o a d Ma l ad d d s o l , o b e iv r d o t y h b a g h t
基于LMI的二级倒立摆的建模与仿真

基于LMI的二级倒立摆系统的∞H鲁棒控制摘要倒立摆系统为典型的快速、多变量、非线性、绝对不稳定系统, 且存在不确定因素。
针对二级倒立摆系统中所受摩擦的不确定性,采用LMI方法, 建立了二级倒立摆模型,设计了∞H鲁棒控制器, 给出了控制器的求解方法。
仿真实验结果证明了该控制方法的有效性和可行性,并且具有很好的鲁棒稳定性和响应速度快的优越性,对高阶次不稳定系统具有很好的控制效果。
关键词:二级倒立摆;线性矩阵不等式(LMI);∞H鲁棒控制0 引言现代控制工程所面临的问题极其复杂。
实际的工程控制系统中, 总是存在一定的不确定性。
倒立摆即是一个包含不确定性的系统, 也是控制理论的一个理想实验平台, 对倒立摆系统的研究具有重要的理论和实际意义。
本文采用线性矩阵不等式(LMI)方法,设计了二级倒立摆系统的鲁棒∞H状态反馈控制器,有效地克服了用求解两个联立的里卡迪方程获得∞H控制器时求解过程不容易收敛的困难,并且可降低控制器参数的数量级,使其在实控上易于实现。
根据文献[1]中对LMI的处理方法, 对二级倒立摆系统进行了仿真研究,结果表明,这样的控制方法可使二级倒立摆系统具有很好的鲁棒稳定性。
1 二级倒立摆系统建模1.1 倒立摆系统结构图1是二级倒立摆的系统结构图,它由三部分组成:计算机、电气部分和机械部分。
计算机部分有A/D、D/A转换模块,运动控制卡和PC机;电气部分主要有:光电编码器、直流功率放大器、伺服电机和保护电路;机械部分有摆杆、轨道、运动小车和皮带轮等。
计算机伺服驱动器运动控制卡伺服电机小车下摆杆上摆杆光电编码器1光电编码器2光电编码器3图1 二级倒立摆系统结构图1.2 倒立摆系统特性分析倒立摆系统是典型的机械电子系统,具有如下特性:(1)欠冗余性。
一般的倒立摆控制系统采用单电机驱动,无冗余结构。
采用欠冗余的设计方法主要是在不失系统可靠性的前提下节约经济成本或节约有效的空间。
(2)仿射非线性系统。
倒立摆控制系统是一种典型的仿射非线性系统,可以用微分几何的方法进行分析。
二级倒立摆仿真研究
长江大学工程技术学院毕业设计(论文)题目名称二级倒立摆的仿真研究系部信息系专业班级测控技术与仪器61101班学生姓名王健新指导教师张国胜/讲师辅导教师张国胜/讲师时间2014年9月至2015年6月目录任务书 (Ⅰ)开题报告 (Ⅱ)指导教师审查意见 (Ⅲ)评阅教师评语 (Ⅳ)答辩会议记录 (Ⅴ)中文摘要 (Ⅵ)外文摘要 (Ⅶ)1绪论 (2)1.1倒立摆系统的研究背景 (2)1.2倒立摆系统的发展趋势 (1)1.3倒立摆系统的研究目的及意义 (3)1.4本论文主要研究内容和思想 (4)2直线二级倒立摆 (5)2.1二级倒立摆的实现原理 (5)2.2二级倒立摆组成结构与实物模型 (6)2.3数学模型的建立及系统分析 (8)2.4系统可控可观性分析 (15)3直线二级倒立摆MATLAB仿真 (17)3.1MATLAB/S IMULINK中二级倒立摆的仿真 (17)3.2二级倒立摆MATLAB中控制器的设计 (19)4二级倒立摆的LQR实物控制实验 (14)4.1二级倒立摆的安装 (14)4.2实物控制 (26)5系统的异常分析与处理 (31)5.1处理以及分析系统的非线性 (31)5.2处理及分析系统的干扰 (31)6总结与展望 (33)6.1总结 (33)6.2展望 (34)参考文献 (34)致谢 (36)长江大学工程技术学院毕业设计(论文)任务书系信息系专业测控技术与仪器班级测控61101 班学生姓名王健新指导教师/职称张国胜/讲师1.毕业设计(论文)题目:二级倒立摆的仿真研究2.毕业设计(论文)起止时间:2014年9月1日~2015年6月1日3.毕业设计(论文)所需资料及原始数据(指导教师选定部分)[1] 高等学校毕业设计指导手册(电子信息卷).北京:高等教育出版社,1998年[2]史晓霞等,二级倒立摆系统数学模型的建立和意义,河北工业大学学报,2001(10):48一51。
[3]宋君烈等,倒立摆系统的Lagrange方程建模与模糊控制,东北大学学报,2002(4):333一337。
直线二级倒立摆系统MATLAB模型的建立与仿真
直线二级倒立摆系统模型的建立与仿真1 引言倒立摆是一个高阶次、非线性、快速、多变量、强藕合、不稳定的系统。
在控制理论发展过程中,倒立摆常常被做为典型的被控对象来验证某一理论的正确性,以及在实际应用中的可行性,通过对倒立摆引入一个适当的控制方法使之成为一个稳定系统,来检验控制方法对不稳定性、非线性和快速性系统的处理能力。
该控制方法在军工、航天、机器人等领域和一般工业过程中都有广泛应用。
本文主要讨论二级倒立摆系统模型的建立和仿真。
2二级倒立摆系统数学模型直线二级倒立摆系统是由直线运动模块和两级倒立摆组件组成。
主要包括导轨、小车和各级摆杆、编码器等元件。
由驱动电机给小车施加一个控制力,迫使小车在导轨上左右移动。
而小车的位移和各级摆杆角度由编码器测得。
倒立摆的控制目标是使倒立摆的摆杆能在有限长的导轨上快速的达到竖直向上的稳定状态,以实现系统的动态平衡,并且小车位移和摆杆角度的振荡幅度较小,系统具有一定的抗干扰能力。
系统简化后的直线二级倒立摆系统物理结构图如图2.1所示。
图1.二级倒立摆系统模型系统模型建立所用的各参数如下:应用Lagrange 方程建立的数学模型为012221221211121221222212212222cos (,)cos()cos cos()1121111121111m +m +m (m l +m L )cos m l H (m l +m L )cos J m l m L m l L m l m l L J m l θθθθθθθθθθ⎡⎤⎢⎥=++-⎢⎥⎢⎥-+⎣⎦.1011...1221212122.11222cos (,,,)0(0(112222222f m l +m L sin m l H f f m l L sin f m l L sin f f θθθθθθθθθθθθθ⎡⎤-•⎢⎥⎢⎥=--•+⎢⎥⎢⎥-•+-⎢⎥⎣⎦111()-)-) 312(,)h θθ= [0 11211()sin m l m L g θ+ 212sin m l g θ] T0h =[1 0 0]T()1121212121312022(,)(,,,),x x H H h h u θθθθθθθθθθθθ⎡⎤⎡⎤⎢⎥⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦3 倒立摆PID控制器系统PID控制是比例积分微分控制的简称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二级倒立摆系统的控制与仿真一、引言在计算机参与的具有联系受控对象的控制系统中,有必要对联系控制系统设计数字控制器的必要,一般对于联系的控制对象设计数字控制器的方法有:第一种是应用联系系统理论得到的联系控制规律,再将控制规律离散化,用控制器实现,第二种是将联系的控制对象离散化,用离散控制理论设计控制器参数,数字再设计就是根据连续系统及相应的控制规律如何重新设计对应的离散系统与相应的离散控制规律。
我们采用的是最优等价准则、双线性变换法、平均增益法进行数字再设计。
二、LQR控制器设计(1) 二级倒立摆系统的状态空间模型设线性定常系统为x’=A*x(t)+B*u(t),y=C*x(t)其初始条件为x(t)=x0;其中:A=[0,1,0,0;40,0,0,0;0,0,0,1;-6,0,0,0];B=[0;-2;0;0.8];C=[1,0,0,0;0,0,1,0](2) 系统的能控性判定n=size(A); Tc=ctrb(A,B); nc=rank(Tc)n=6 6 nc=6从运行结果可知,系统的阶次为6,能控性矩阵的秩也为6,因此系统是能控的。
(3) 系统的能观性判定To=obsv(A,C);no=rank(To)no=6从运行结果可知,能观性矩阵的秩为6,与系统的阶次相等,因此系统是能观测的。
(4) LQR控制设计基于一级倒立摆系统具有能控性和能观性,因此可采用LQR进行控制,经大量反复试验和仿真,选取R=0.2,Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];F=lqr(A,B,Q,R)得到:F =2.2361 106.6465 -155.4620 5.1719 4.9639 -24.5330三、仿真曲线采用LQR控制方式,设初始状态为x(0)=[1,-1,0,0]’,在相同采样周期T下应用数字再设计方法对一级倒立摆系统进行仿真,其中F(T)分别取为:1. F(T)=F1(T)=F2. F(T)=F2(T)=F[I+(A+BF)T/2]3. F(T)=F3(T)=F[I-(A+BF)/2]-1(1) T=0.013s,øc=e(A+BF)T时系统的极点、状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;[G,H]=c2d(A-B*F,B,T); %%离散一的函数p0=eig(G),x0=[1 -1 0.5 0 0 0]';[y,x t]=dinitial(G,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%响应曲线plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')p0 =0.8647 + 0.0473i0.8647 - 0.0473i0.9224 + 0.0618i0.9224 - 0.0618i0.9932 + 0.0066i0.9932 - 0.0066i图1 øc=e(A+BF)T(2) T=0.013s,øc=ø +ΓF1(T)时系统的极点、状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0,0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;[Ad,B]=c2d(A,B,T); %%离散二的函数Ad=Ad-B*F;p1=eig(Ad)x0=[1 -1 0.5 0 0 0]';[y,x t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')p1 =0.8349 + 0.0388i0.8349 - 0.0388i0.9247 + 0.0561i0.9247 - 0.0561i0.9932 + 0.0066i0.9932 - 0.0066i图2 øc=ø +ΓF1(T)(3) T=0.013s,øc=ø+ΓF2(T)时系统的极点、F(T)值和状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;P2=(A-B*F)*T/2; %%离散3的函数F2=F*(eye(size(P2))+P2)[Add,B]=c2d(A,B,T);Ad=[Add-B*F2];p2=eig(Ad)x0=[1 -1 0.5 0 0 0]';[y,x,t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')F2 =1.7236 90.8365 -126.5481 4.0012 4.5195 -19.9211 p2 =0.8676 + 0.0465i0.8676 - 0.0465i0.9224 + 0.0627i0.9224 - 0.0627i0.9932 + 0.0066i0.9932 - 0.0066i图3 øc=ø+ΓF2(T)(4) T=0.013s,øc=ø+ΓF3(T)时系统的极点、F(T)值和状态x1、x2、x3的离散仿真曲线A=[0,0,0,1,0,0;0,0,0,0,1,0;0,0,0,0,0,1;0,0,0,0,0,0;0,77.0642,-21.1927,0,0, 0;0,-38.5321,37.8186,0,0,0];B=[0;0;0;1;5.7012;-0.0728];C=[1,0,0,0,0,0;0,1,0,0,0,0;0,0,1,0,0,0];D=[0;0;0];Q=[1 0 0 0 0 0;0 64 0 0 0 0;0 0 256 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0;0 0 0 0 0 0];R=0.2;F=lqr(A,B,Q,R)T=0.013;P3=(A-B*F)*T/2; %%离散4的函数F3=F*(eye(size(P3))-P3)^-1[Add,B]=c2d(A,B,T);Ad=[Add-B*F3];p3=eig(Ad),[y,x,t]=dinitial(Ad,B,C,D,x0);t=0:0.1:(t-1)/10;subplot(3,1,1),x1=[1 0 0 0 0 0]*x'; %%显示程序plot(t,x1);grid;title('状态变量x1的响应曲线')subplot(3,1,2),x2=[0 1 0 0 0 0]*x';plot(t,x2);grid;title('状态变量x2的响应曲线')subplot(3,1,3),x3=[0 0 1 0 0 0]*x';plot(t,x3);grid;title('状态变量x3的响应曲线')F3 =1.7779 92.1683 -129.2365 4.1238 4.5459 -20.3464 p3 =0.8655 + 0.0476i0.8655 - 0.0476i0.9222 + 0.0622i0.9222 - 0.0622i0.9932 + 0.0066i0.9932 - 0.0066i图4 øc=ø+ΓF3(T)由上面的1-4图我们可以知道:F(T)分别取F1(T),F2(T),F3(T)构成的闭环离散系统时仿真曲线基本一致,相应情况的闭环极点也基本相同,而取F(T)=F3(T)时,从系统的极点看,用øc=ø+ΓF3(T)代替øc=e(A+BF)T 构成闭环系统的精确度相当好。