OMRON CP H脉冲指令说明总结
欧姆龙高速脉冲指令
欧姆龙高速脉冲指令
摘要:
1.欧姆龙CPH 型PLC 简介
2.高速脉冲输出指令的作用
3.高速脉冲输出指令的应用实例
4.总结
正文:
一、欧姆龙CPH 型PLC 简介
欧姆龙CPH 型PLC 是日本欧姆龙公司推出的一款可编程逻辑控制器,广泛应用于各种工业自动化控制场合。
其具有高速、高性能、多功能、易编程等特点,能够满足不同场合的控制需求。
二、高速脉冲输出指令的作用
高速脉冲输出指令是欧姆龙CPH 型PLC 中的一种指令,主要用于控制步进电机或伺服电机等高速脉冲驱动设备。
通过高速脉冲输出指令,可以实现对驱动设备的精确控制和调速,从而满足各种工业自动化控制场合的要求。
三、高速脉冲输出指令的应用实例
1.控制步进电机
步进电机是一种将电脉冲转换为角位移的电机,其工作原理是通过接收脉冲信号,驱动电机转动一定的角度。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以精确控制步进电机的转速、位置和转向,实现对步进电机的精确控制。
2.控制伺服电机
伺服电机是一种通过接收脉冲信号实现角位移控制的电机。
与步进电机不同,伺服电机具有更高的控制精度和更低的转速波动。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以实现对伺服电机的精确控制和调速,提高控制精度和运动平稳性。
四、总结
欧姆龙CPH 型PLC 的高速脉冲输出指令在工业自动化控制领域具有广泛的应用,可以实现对步进电机和伺服电机等高速脉冲驱动设备的精确控制和调速。
欧姆龙高速脉冲指令
欧姆龙高速脉冲指令摘要::欧姆龙高速脉冲指令1.欧姆龙CPH 型PLC 简介2.高速脉冲指令的应用3.高速脉冲指令的使用方法4.高速脉冲指令的优势和局限5.欧姆龙高速脉冲指令在工业自动化领域的应用案例正文:欧姆龙高速脉冲指令欧姆龙CPH 型PLC 是一种广泛应用于工业自动化领域的可编程逻辑控制器。
它具有强大的控制功能和稳定的性能,可以满足各种复杂的控制需求。
在欧姆龙CPH 型PLC 中,高速脉冲指令是一种重要的控制指令,主要用于控制步进电机、伺服电机等高速运动设备。
高速脉冲指令的应用非常广泛,主要涉及到印刷、包装、纺织、机床、机器人等众多领域。
例如,在印刷行业中,高速脉冲指令可以用于控制印刷机的滚筒旋转;在包装行业中,可以用于控制包装机的封口装置;在纺织行业中,可以用于控制纺织机的纱锭旋转等。
高速脉冲指令的使用方法相对简单,可以通过编写程序实现对设备的控制。
在编写程序时,需要根据设备的具体参数和控制要求,设置适当的脉冲频率、脉冲数量等参数。
此外,还需要注意避免脉冲信号的干扰,确保控制信号的稳定性和可靠性。
欧姆龙高速脉冲指令具有以下优势:1.高速:高速脉冲指令可以实现快速、精确的控制,提高设备的运行效率和精度;2.稳定:高速脉冲指令具有较强的抗干扰能力,可以保证控制信号的稳定性和可靠性;3.灵活:高速脉冲指令可以适应不同设备的控制需求,具有较强的灵活性。
然而,欧姆龙高速脉冲指令也存在一定的局限性,如对脉冲信号的频率、幅值等参数有一定的要求,需要根据具体的设备参数进行调整。
在工业自动化领域,欧姆龙高速脉冲指令的应用案例众多。
例如,在印刷行业中,可以用于控制印刷机的滚筒旋转,实现高速、精确的印刷;在包装行业中,可以用于控制包装机的封口装置,实现高速、精确的包装;在纺织行业中,可以用于控制纺织机的纱锭旋转,实现高速、精确的纺织等。
OMRON PLC 常用基本指令
第三节OMRON PLC常用基本指令一、逻辑条件指令逻辑条件指令用于为输出指令、功能指令建立逻辑条件⒈起始指令LD和LD NOT每一个梯级的开始要用起始指令如果梯级的开始是常开触点,就使用LD指令如果梯级的开始是常闭触点,就用LD NOT指令LD和LD NOT指令的使用0000010000 0000110001地址指令助记符数据00000LD00000 00001OUT10000 00002LD NOT00001 00003OUT10001⒉逻辑与操作指令AND和AND NOT逻辑与就是触点的串联连接指令 串联一个常开触点用AND指令串联一个常闭触点用AND NOT指令AND和AND NOT指令的用法000010000310000 000020000410001地址指令助记符数据00000LD0000100001AND NOT0000300002OUT1000000003LD NOT0000200004AND0000400005OUT10001⒊逻辑或操作指令OR和OR NOT逻辑或就是触点的并联连接指令 并联一个常开触点用OR指令并联一个常闭触点用OR NOT指令OR和OR NOT指令的用法指令助记符数 据LD NOT 00000OR00001OR NOT 00002AND 00003OUT 100030000010003000010000200003AND LD指令和OR LD指令各有什么功能?⒋块与指令AND LDAND LD指令用来处理两个触点组的串联 触点组是若干个触点的组合,也叫程序块 当两个触点组(程序块)串联时,每个触点组都以起始指令(LD或LD NOT)开始单独编程,然后用AND LD指令将它们串联起来AND LD指令的用法LD 00000OR 00001LD00002OR NOT 00003AND LD OUT100000000010000000010000300002程序块程序块⒌块或指令OR LDOR LD指令用来处理两个触点组的并联 当两个触点组(程序块)并联时,每个触点组都以起始指令(LD或LD NOT)开始单独编程然后用OR LD指令将两个触点组并联OR LD指令的用法LD 00000AND 00002LD00001AND NOT 00003OR LD OUT100000000010000000010000300002程序块程序块二、输出指令按照逻辑条件建立继电器、定时器、计数器等元件的状态⒈OUT和OUT NOT指令OUT指令将逻辑操作的结果写到输出继电器、内部辅助继电器、保持继电器及暂存继电器等OUT NOT指令是将逻辑操作的结果取反后写到输出继电器、内部辅助继电器、保持继电器等常用基本指令应用举例PLC0000100002000030000400005000060000710004100001000110004END程序工作演示⒉锁存指令KEEP使用KEEP指令的继电器有两个输入端 置位端S复位端R置位端逻辑一接通,继电器接通并保持 当复位端逻辑接通时,该继电器才断开锁存指令KEEP工作演示LD 00002LD 00003KEEP 10000000021000000003KEEP SR 00002100001000000003实现自锁功能有几种方法?有什么不同?KEEP指令可实现自锁功能锁存指令的工作波形图0000210000 00003KEEPSR⒊微分指令微分指令分为两种上升沿微分指令DIFU下降沿微分指令DIFDDIFU的功能是:当逻辑条件从断到通时,指定继电器仅接通一个扫描周期DIFD的功能是:当逻辑条件从通到断时,指定继电器仅接通一个扫描周期微分指令DIFU、DIFD工作演示微分指令的工作波形图00002DIFU 01600DIFD 0160100002 01600 01601接通断开接通LD00002DIFU01600DIFD01601⒋暂存继电器暂存继电器TR的功能是什么?使用中要注意什么? 暂存继电器用于存储程序分支点处的ON/OFF状态CQM1H系列PLC有8个暂存继电器,编号为TR0~TR7在不同的梯级间,同一个暂存继电器可重复使用暂存继电器的使用LD 00002OUT TR0AND 00003OUT TR1AND 00004OUT 10000LD TR1AND 00005OUT 10001LD TR0AND 00006OUT10002该梯形图中有两个分支,要用两个暂存继电器TR0和TR1来暂存分支点的状态⒌定时器指令CQM1H系列PLC有两种定时器普通定时器TIM,时基是0.1s高速定时器TIMH,时基是0.01s定时时间设定值的范围为0~9999定时时间=设定值×时基OMRON PLC中单个定时器最大定时时间是多长?定时器的工作原理普通定时器和高速定时器均为减法定时器定时器的输入逻辑接通就开始定时,当定时器的当前值减到0时,定时时间到,其触点动作当定时器的输入逻辑断开时,定时器立即复位,触点恢复原状,且定时值恢复到设定值定时器指令TIM工作演示高速定时器指令TIMH与一般定时器指令TIM的区别是什么?定时器的工作波形图LD 00003TIM 000─#0100LD TIM000OUT1000000003TIM000#0100TIM00010000【例2】用两个定时器延长定时时间00002TIM001#9000TIM00110000TIM002#9000TIM002延长定时时间的方法有几种?各有什么特点?【例3】已知梯形图程序如图所示,试分析该梯形图的功能,并画出波形图由梯形图画波形图是分析梯形图程序的一种常用方法在画波形图之前,先看懂梯形图程序然后按照工作的先后顺序逐步画出波形图6s00002100011000100002TIM001TIM001#006010001END⒍计数器CNT设定值用4位十进制数表示,范围0~9999计数器的计数输入端CP每接通1次,计数值减1 当计数值减到0时,计数器的触点动作当计数器的复位端R接通时,计数器被复位,其触点恢复原状,且计数值恢复到设定值计数器指令CNT工作演示计数器CNT的工作波形图00005 00000 10001332100数字表示计数器的当前值LD00005LD00000CNT001─#0003LD CNT001OUT10001 00005CNT001#00030000010001CNT001CPRCNT指令的功能是什么?其输入端CP和R哪个优先?⒎可逆计数器CNTRCNTR指令符号有几个输入端?各有什么作用?可逆计数器有3个输入端加计数端II减计数端DI复位端R加计数端每接通1次,可逆计数器的值加1 减计数端每接通1次,可逆计数器的值减1 复位端接通时,可逆计数器被复位成0000可逆计数器指令CNTR工作演示可逆计数器的工作波形图LD00002LD00003LD00004CNTR011─#0003LD CNT011OUT10000 00002CNTR 011#00030000310000CNT01100004【例4】用定时器和计数器延长定时时间TIM001接成自复位定时器。
欧姆龙PLC(脉冲式)使用(一)

*PLC的扫描周期与用户程序的长短和该PLC的 扫描速度紧密相关。
14
PLC的工作原理
I/O、内部辅助、特 殊辅助、辅助记忆 继电器区域清零;
定时器预置; 识别扩展单元
电源接上
初始化 硬件、用户程序内存的检查
设置各异常继电器 异常:[ERR/ALM]LED亮 警告:[ERR/ALM]LED闪烁
异常
16
PLC与其它工业控制器产品相互融合
与个人计算机PC 集散控制系统DCS 计算机数控CNC
17
整体式PLC(以CP1H为例)
其CPU单元中装配了20~40点的输入输出电路。它将模块式的各个单元集成为一体, 不如模块式灵活但是使用方便。如果I/O点数不够用可用CPM1A系列扩展单元进行扩展, 但最多不能超过7台。
下面我们以OMRON(欧姆龙)公司生产的CP1H型PLC为典型机型, 中型PLC以CJ1型为例。
CP1H CPU 单元包括X(基本型)/XA(带内置模拟输入输出端子) /Y(带脉冲输入输出专用端子)3 种类型。
(我们讲的主要采用XA型)XA(带内置模拟输入输出端子)在X 型上添加模拟输入输出功能的类型
检查结果正常?
正常
扫描周期监视时间预置
执行用户程序
异常或警告? 警告 异常程序结束? Nhomakorabea否
(END命令?)
是
扫描周期固定值设定检查
欧姆龙CP系列编程手册00002
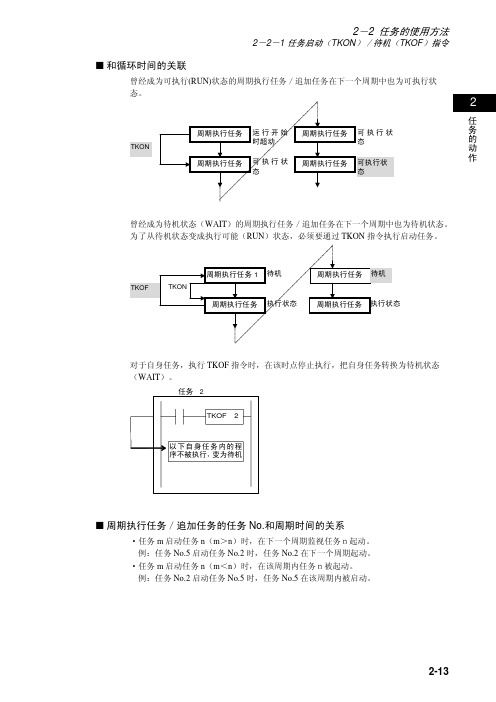
2-2-1 任务启动(TKON )/待机(TKOF )指令任务的动作■ 和循环时间的关联曾经成为可执行(RUN)状态的周期执行任务/追加任务在下一个周期中也为可执行状态。
TKON曾经成为待机状态(WAIT )的周期执行任务/追加任务在下一个周期中也为待机状态。
为了从待机状态变成执行可能(RUN )状态,必须要通过TKON 指令执行启动任务。
对于自身任务,执行TKOF 指令时,在该时点停止执行,把自身任务转换为待机状态(WAIT )。
■ 周期执行任务/追加任务的任务No.和周期时间的关系·任务m 启动任务n (m >n )时,在下一个周期监视任务n起动。
例:任务No.5启动任务No.2时,任务No.2在下一个周期起动。
·任务m 启动任务n (m <n )时,在该周期内任务n被起动。
例:任务No.2启动任务No.5时,任务No.5在该周期内被启动。
2-2-1 任务启动(TKON)/待机(TKOF)指令任务的动作·任务m使任务n(m>n)为待机时,在下一周期任务n为待机(任务n在该周期内已经执行完)。
例:任务No.5使任务No.2为待机时,任务No.2下一个周期为待机。
·任务m使任务n(m<n)为待机时,在该周期内任务n为待机。
例:任务No.2要使任务No.5为待机时,任务No.5在该周期为待机。
■任务和I/O内存的关系·在变址寄存器(IR)以及数据寄存器(DR)中有2种使用方法。
①按各个任务分别(单独)使用的方法②各任务共同使用的方法在①的方法中,在周期执行任务1中使用的IR0和在周期执行任务2中使用的IR0不相同。
在②的方法中,在周期执行任务1中使用的IR0和周期执行任务2中使用的IR0为相同。
对于变址寄存器(IR)以及数据寄存器(DR)采用①的方法还是采用②的方法由CX-Programmer进行设定。
·其它区域各任务共同使用。
比如对于在周期执行任务1中使用的接点10.00和周期执行任务2中使用的接点10.00是指同一个接点。
第五章OMRON plc脉冲输出详解

定
点确定状态,自动变为绝对坐标。原点未确定状态下,为相对坐标。
相对脉冲指定/绝对脉冲指定
通过 PULS 指令或 PLS2 指令的操作数,可进行指定。
注:脉冲输出当前值为绝对坐标(原点确定状态)时,可进行绝对脉冲指定。
相对坐标(原点未确定状态)时,不可进行绝对脉冲指定(出现指令执
行出错)。
脉冲输出当前值保存目的地
03
通用输入 3 输入中断 3 脉冲接收 3
高速计数器 0(Z 相/复位)
PLS2 指令)
一种。但是,脉冲输出 0、1 的情况下,限于同一方式。
注:脉冲输出当前值被保存到特殊辅助继电器区域。
5
原点搜索/复位
原点决定(原点搜索、原点复 在脉冲输出时,可进行原点搜索/复位
CP1H
位)功能
・原点搜索:
通过 PLC 系统设定设定为「使用原点搜索」,并在设 定各种参数的状态下、执行 ORG(原点搜索)指令时, 开始原点搜索,将原点确定为原点附近输入信号及原点
NC 00 01 02 03 04 06 00 01 03 04 06
5
NC COM COM COM COM 05 07 COM 02 COM 05 07
CP1H
100 CH
101 CH
的
脉冲输出 2
原点搜索 3(偏差计数器复位输出)
基
本
原点搜索 2(偏差计数器复位输出)
功
原点搜索 1(偏差计数器复位输出)
-
脉冲输出 2(CCW) 脉冲输出 2(方向) -
-
脉冲输出 3(CW) 脉冲输出 3(脉冲) -
-
脉冲输出 3(CCW) 脉冲输出 3(方向) -
-
-
OMRON CP1H脉冲指令说明总结

s1+2 目标频率(低位) s1+3 目标频率(高位)
s1+4 脉冲输出量设定量(低位) s1+5 脉冲输出量设定量(高位)
PLS2(定位)
端口c1: 000-0003 端口指定
方向指定符: 000 cw方向, 001 ccw方向
第一个控制字s: s加速比率,s+1加速后目标频率, s+2(低四位)、s+3(高四位):输出脉冲数
ACC
端口c1: 0000-0003 端口指定
模式000:
设定表低位CH编号s: s加速比率,s+1加速后目标频率, s+2减速比率,s+3减速后目标频率 注:输出指定脉冲数后停止脉冲输出
模式001:(加速)
设定表低位CH编号s: s加速比率,s+1加速后目标频率
模式002:(减速)
设定表低位CH编号s: s减速比率,s+1减速后目标频率 注:输出指定脉冲数后停止脉冲输出
模式003:(减速)
设定表低位CH编号s: s减速比率,s+1减速后目标频率
PULS
端口指定: 0000-0003 端口指定
控制数据:
脉冲频率s: s目标频率(低位), s+1目标频率(高位)
PULS
端口c1: 0000-0003 端口指定
控制数据c2: 0000 相对脉冲输出(输出量=设定量) 0001 绝对脉冲输出(输出量=设定量-当前值)
脉冲输出量s: s脉冲输出量(低位), s+1脉冲输出量(高位)
变更数据保存低位CH编号:s变更数据(低位) s+1变更数据(高位)
欧姆龙plc指令讲解
当RESET指令的执行条 件为ON时,使指定继电 器复位为OFF,当执行 条件为OFF时,RESET 指令不改变
8.保持指令---KEEP(11)
功能: 根据两个执行条件,KEEP用来保持指定继 电器N的ON状态或OFF状态。 具有断电保持功能。 KEEP指令的用法
应用下一页
用TR位处理梯形图的分支
多分支下一页
用TR位处理多分支电路
TR指令的说明下一页
TR指令的说明
在同一程序段中,同一 TR 号 不 能 重 复 使 用 , 在不同的程序段中,同 一 TR 号可以重复使用。
TR不是独立的编程指 令,只能和LD或OUT 等基本指令一起使用 指令的梯形图。
若输入继续为ON,则 定时器的输出保持为 ON。 当定时器的输入变为 OFF时,定时器的输 出随之变为OFF。
输入on
开始定时延时时间到输出on
应用下一页
TIM指令的应用
注意: 定时器没有断电保持功能,断电时,定时器 复位,不能保存定时器的当前值。
2.高速定时器下一页
2.高速定时器指令一TIMH(15)
应用下一页
CNT指令的应用
说明: (1)计数器编程时,先编计数输入端,再编复位端, 最后编CNT指令。 (2)定时器和计数器的编号是共用的,使用时不能 冲突。 工作时序下一页
CNT的工作时序
4.可逆计数器下一页
4.可逆计数器指令一CNTR(12) 梯形图符号及操作数取值区域
注释:
N为计数器TC号,SV为计数设定值。ACP为加计 数脉冲输入端,SCP为减计数脉冲输入端,R为复位 端。 应用下一页
(3)触点不能画在垂直路径上
编制梯形图应注意的问题
(4)编程时,对于逻辑关系复杂的程序 段,应按照先复杂后简单的原则编程。
欧姆龙PLC(脉冲式)使用(二)

减法运算,并将结果输出到 D。结果转成负数时, 据进行 BIN 减法运算,将结果输出到 D+1、 D。
以 2 的补数输出到 D。
结果转成负数时,以 2 的补数 输出到 D+1、 D。
四则运算
(例)减
单字节(-)法运算及触发方式
双字节(-L)法运算及触发方式
四则运算
乘(*)
对通道数据和常数进行带符号16进 制4位的乘法运算。(单字节)
连接类型:LD(读)、AND(与)、OR(或)
四则运算
符号.选项
四则运算
(例)AND连接类型的<指令、<S指令
<指令的动作
0.00为ON时,对D100的数据和D200的数 据进行无符号比较,比较结果为D100的数 据<D200的数据时被连接到下一段,继电器 100.00输出为ON。
<S指令的动作
执行一次 ACC 指令时,按指定的条件开始进 行脉冲的输出。因此基本上在输入微分型(带 @)或 1 周期 ON的输入条件下使用。
高速脉冲计数器
例:
0.00 由 OFFON → 时,通过 PULS 指令由相对脉冲指定将脉冲输出 0 的脉冲输出 量设定为 5,000 脉冲。同时通过SPED 指令用 CW/CCW 方式、CW 方向、独立模 式开始输出目标频率 500Hz 的脉冲。
高速脉冲计数器
脉冲量设置 PULS
设定脉冲输出量。 在由本指令设定的脉冲输出量的状态下,通过用独立模式来执行频率设定 (SPED)指令或频率加减速控制(ACC)指令,来输出设定的脉冲量。
功能说明 将 S 所指定的带符号 BIN 数据(16 位)转换为单精度 浮点数据(32 位:IEEE754),将结果输出到 D+1, D。 浮点数据在小数点之后变为 1 位的 0。
OMRONCPH脉冲指令说明总结

O M R O N C P H脉冲指令说明总结集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]CPIH:INI端口c1: 0000-0003 脉冲输出端口指定0-3 0010-0013 高速计数器输入0-30100-0107 中断输入0-7(计数模式) 1000-1001 PWM输出0-1控制数据c2: 0000 比较开始, 0001 比较停止, 0002 变更当前值,0003停止脉冲输出变更数据保存低位CH编号:s变更数据(低位) s 1变更数据(高位)SPED端口c1: 0000-0003 端口指定模式c2: 0000 cw/ccw输出方式,cw方向,连续模式 0001 cw/ccw输出方式,cw方向,独立模式0010 cw/ccw输出方式,ccw方向,连续模式 0011 cw/ccw输出方式,ccw方向,独立模式0100 脉冲输出方式, cw方向,连续模式 0101 脉冲输出方式, cw方向,独立模式0110 脉冲输出方式, ccw方向,连续模式 0111 脉冲输出方式, ccw方向,独立模式第2位(0cw/ccw方向 1脉冲输出方式)第3位为方向指定(0 cw/1 ccw)第4位为模式指定(0连续/1独立)注:独立模式由puls指令设定脉冲量,走完后停止脉冲输出脉冲频率s: s目标频率(低位), s 1目标频率(高位)PULS端口c1: 0000-0003 端口指定控制数据c2: 0000 相对脉冲输出(输出量=设定量) 0001 绝对脉冲输出(输出量=设定量-当前值)脉冲输出量s: s脉冲输出量(低位), s 1脉冲输出量(高位)PLS2(定位)端口c1: 0000-0003 端口指定模式c2: 0000 cw/ccw输出方式,cw方向,指定相对脉冲 0001cw/ccw输出方式,cw方向,指定绝对脉冲0010 cw/ccw输出方式,ccw方向,指定相对脉冲 0011cw/ccw输出方式,ccw方向,指定绝对脉冲0100 脉冲输出方式, cw方向,指定相对脉冲 0101 脉冲输出方式, cw方向,指定绝对脉冲0110 脉冲输出方式, ccw方向,指定相对脉冲 0111 脉冲输出方式, ccw方向,指定绝对脉冲第2位(0cw/ccw方向 1脉冲输出方式)第3位为方向指定(0 cw/1 ccw)第4位为模式指定(0指定相对脉冲/1指定绝对脉冲)注:绝对脉冲(输出量=设定量-当前值)设定表低位CH编号s1: s1 加速比率, s1 1 减速比率s1 2 目标频率(低位) s1 3 目标频率(高位)s1 4 脉冲输出量设定量(低位) s1 5 脉冲输出量设定量(高位)启动频率s2: s2启动频率(低位) s2 1启动频率(高位)ACC端口c1: 0000-0003 端口指定模式c2: 0000 cw/ccw输出cw方向,连续模式 0001 cw/ccw 输出cw方向,独立模式第4位为模式指定(0连续/1独立)第3位为方向指定(0 cw/1 ccw)第2位(0cw/ccw方向 1脉冲输出方式)注:独立模式由puls指令设定脉冲量,走完后停止脉冲输出设定表低位CH编号s: s加减速比率,s 1目标频率(低位), s 2目标频率(高位)ORG端口c1: 0000-0003 端口指定控制数据c2: 0000 原点检索、cw/ccw输出, 0100 原点检索、脉冲方向输出,(参数由系统设定)1000 原点复位、cw/ccw输出, 1100 原点检索、脉冲方向输出,CQM1H:SPEED端口c1: 000-003 端口指定模式000 :独立模式模式001 :连续模式脉冲频率s: s(低四位)、s 1(高四位):目标频率PLS2(定位)端口c1: 000-0003 端口指定方向指定符: 000 cw方向, 001 ccw方向第一个控制字s: s加速比率,s 1加速后目标频率, s 2(低四位)、s 3(高四位):输出脉冲数ACC端口c1: 0000-0003 端口指定模式000:设定表低位CH编号s: s加速比率,s 1加速后目标频率, s 2减速比率,s 3减速后目标频率注:输出指定脉冲数后停止脉冲输出模式001:(加速)设定表低位CH编号s: s加速比率,s 1加速后目标频率模式002:(减速)设定表低位CH编号s: s减速比率,s 1减速后目标频率注:输出指定脉冲数后停止脉冲输出模式003:(减速)设定表低位CH编号s: s减速比率,s 1减速后目标频率PULS端口指定: 0000-0003 端口指定控制数据:000: cw脉冲输出脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数001: ccw脉冲输出脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数002: cw脉冲输出脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数 s 2(低四位)、s 3(高四位):减速点脉冲数(输出的此脉冲数后开始减速)003: ccw脉冲输出脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数 s 2(低四位)、s 3(高四位):减速点脉冲数(输出的此脉冲数后开始减速)004: cw脉冲输出,不定脉冲数005: ccw脉冲输出,不定脉冲数。
欧姆龙PLC指令集
欧姆龙PLC指令集识别码plc的工作模式名称RUN MON PRGRR ○ ○ ○ 读出输入/输出内部辅助/特殊继电器区RL ○ ○ ○ 读出链接继电器(LR)区RH ○ ○ ○ 读出保持继电器(HR)区RC ○ ○ ○ 读出定时器/计数器当前值区RG ○ ○ ○ 读出定时器/计数器设定值数据RD ○ ○ ○ 读出数据内存(DM)区RJ ○ ○ ○ 读出辅助记忆继电器(AR)区WR × ○ ○ 写入输入/输出内部辅助/特殊继电器区WL × ○ ○ 写入链接继电器(LR)区WH × ○ ○ 写入保持继电器(HR)区WC × ○ ○ 写入定时器/计数器当前值区WG × ○ ○ 写入定时器/计数器设定值数据WD × ○ ○ 写入数据内存(DM)区WJ × ○ ○ 写入辅助记忆继电器(AR)区R# ○ ○ ○ 设定值读出1R$ ○ ○ ○ 设定值读出2W# × ○ ○ 设定值写入1W$ × ○ ○ 设定值写入2MS ○ ○ ○ 读出状态CS ○ ○ ○ 写入状态MF ○ ○ ○ 读出故障信息KS × ○ ○ 强制置位KR × ○ ○ 强制复位FK × ○ ○ 多点强制置位/复位KC × ○ ○ 解除强制置位/复位MM ○ ○ ○ 读出机种码TS ○ ○ ○ 测试RP ○ ○ ○ 读出程序WP × × ○ 写入程序QQ ○ ○ ○ 复合命令XZ ○ ○ ○ 放弃(仅命令)** ○ ○ ○ 初始化(仅命令)IC - - - 命令未定义错误(仅响应)说明:1. ○:有效,×:无效,-:与横式无关。
2. RUN=运行,MON=监视,PRG=编程。
例:“@00SC0252*\CR” //将PLC设置在监视模式(00:编程,02:监视,03:运行)其中:“@”为起始符;“00”为通讯站号;“02”为命令见上;“52”=前面所有ASCII字符码值的异或运算结果,“\CR”=字符码chr(13)。
欧姆龙脉冲输出指令详解案例

欧姆龙脉冲输出指令详解案例
可从CPU单元内置输出中发出固定占空比脉冲输出信号,并通过脉冲输入的伺服电动机驱动器进行定位/速度控制。
●可选择脉冲输出功能的「CW/CCW脉冲输出J、「脉冲+方向输出」
可根据电机驱动器的脉冲输入的规格进行选择。
●每个CPU单元的类型及脉冲输出端口的输出频率范围不同
X/XA型的脉冲输出0、1的情况下: 1 Hz~ 100k Hz,脉冲输出2、3的情况下: 1Hz~30kHz
Y型的脉冲输出0、1的情况下: 1 Hz~1M Hz (线路驱动器输出)、脉冲输出2、3的情况下: 1Hz~ 30kHz
●通过方向自动选择功能,绝对坐标系上的定位变得简单
在绝对坐标中动作时(原点确定状态或通过INI指令执行当前值变更),根据指令指定的脉冲输出量与脉冲输出当前值相比为正或为负,CW/CCW的方向在脉冲输出指令执行时被自动选择。
●可进行三角控制
定位(ACC指令(单独)或PLS2指令执行)中,加速及减速时必要的脉冲输出量(达到目标频率的时间x目标频率)超过设定的目标脉
冲输出量时进行三角控制(无恒速时间的台型控制)。
●定位中可变更定位目标位置(多重起动)
通过脉冲输出(PLS2) 指令的定位中,通过执行其它脉冲输出(PLS2) 可变更目标位置、目标速度、加速比率、减速比率。
●可在速度控制中向定位变更(中断恒定距离进给)
速度控制中(连续模式),可变更为通过脉冲输出(PLS2) 指令的定位(单独模式)。
这样,可执行有条件的中断恒定距离进给(指定量的移动)。
●可在加速或减速中变更目标速度、加减速比率
台型加减速的脉冲输出指令执行( 速度控制或定位)过程中,可在加速或减速中变更目标速度及加减速比率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CPIH:
INI
端口c1: 0000-0003 脉冲输出端口指定0-3 0010-0013 高速计数器输入0-3
0100-0107 中断输入0-7(计数模式) 1000-1001 PWM输出0-1
控制数据c2: 0000 比较开始, 0001 比较停止, 0002 变更当前值,0003停止脉冲输出
变更数据保存低位CH编号:s变更数据(低位) s 1变更数据(高位)SPED
端口c1: 0000-0003 端口指定
模式c2: 0000 cw/ccw输出方式,cw方向,连续模式 0001 cw/ccw输出方式,cw方向,独立模式
0010 cw/ccw输出方式,ccw方向,连续模式 0011 cw/ccw输出方式,ccw方向,独立模式
0100 脉冲输出方式, cw方向,连续模式 0101 脉冲输出方式, cw方向,独立模式
0110 脉冲输出方式, ccw方向,连续模式 0111 脉冲输出方式, ccw方向,独立模式
第2位(0cw/ccw方向 1脉冲输出方式)第3位为方向指定(0 cw/1 ccw)第4位为模式指定(0连续/1独立)注:独立模式由puls指令设定脉冲量,走完后停止脉冲输出
脉冲频率s: s目标频率(低位), s 1目标频率(高位)
PULS
端口c1: 0000-0003 端口指定
控制数据c2: 0000 相对脉冲输出(输出量=设定量) 0001 绝对脉冲输出(输出量=设定量-当前值)
脉冲输出量s: s脉冲输出量(低位), s 1脉冲输出量(高位)
PLS2(定位)
端口c1: 0000-0003 端口指定
模式c2: 0000 cw/ccw输出方式,cw方向,指定相对脉冲 0001
cw/ccw输出方式,cw方向,指定绝对脉冲
0010 cw/ccw输出方式,ccw方向,指定相对脉冲 0011
cw/ccw输出方式,ccw方向,指定绝对脉冲
0100 脉冲输出方式, cw方向,指定相对脉冲 0101 脉冲输出方式, cw方向,指定绝对脉冲
0110 脉冲输出方式, ccw方向,指定相对脉冲 0111 脉冲输出方式, ccw方向,指定绝对脉冲
第2位(0cw/ccw方向 1脉冲输出方式)第3位为方向指定(0 cw/1 ccw)第4位为模式指定(0指定相对脉冲/1指定绝对脉冲)注:绝对脉冲(输出量=设定量-当前值)
设定表低位CH编号s1: s1 加速比率, s1 1 减速比率
s1 2 目标频率(低位) s1 3 目标频率(高位)
s1 4 脉冲输出量设定量(低位) s1 5 脉冲输出量设定量(高位)
启动频率s2: s2启动频率(低位) s2 1启动频率(高位)
ACC
端口c1: 0000-0003 端口指定
模式c2: 0000 cw/ccw输出cw方向,连续模式 0001 cw/ccw 输出cw方向,独立模式
第4位为模式指定(0连续/1独立)第3位为方向指定(0 cw/1 ccw)第2位(0cw/ccw方向 1脉冲输出方式)注:独立模式由puls指令设定脉冲量,走完后停止脉冲输出
设定表低位CH编号s: s加减速比率,s 1目标频率(低位), s 2目标频率(高位)
ORG
端口c1: 0000-0003 端口指定
控制数据c2: 0000 原点检索、cw/ccw输出, 0100 原点检索、脉冲方向输出,(参数由系统设定)
1000 原点复位、cw/ccw输出, 1100 原点检索、脉冲方向输出,
CQM1H:
SPEED
端口c1: 000-003 端口指定
模式000 :独立模式
模式001 :连续模式
脉冲频率s: s(低四位)、s 1(高四位):目标频率
PLS2(定位)
端口c1: 000-0003 端口指定
方向指定符: 000 cw方向, 001 ccw方向
第一个控制字s: s加速比率,s 1加速后目标频率, s 2(低四位)、s 3(高四位):输出脉冲数
ACC
端口c1: 0000-0003 端口指定
模式000:
设定表低位CH编号s: s加速比率,s 1加速后目标频率, s 2减速比率,s 3减速后目标频率注:输出指定脉冲数后停止脉冲输出模式001:(加速)
设定表低位CH编号s: s加速比率,s 1加速后目标频率
模式002:(减速)
设定表低位CH编号s: s减速比率,s 1减速后目标频率注:输出指定脉冲数后停止脉冲输出
模式003:(减速)
设定表低位CH编号s: s减速比率,s 1减速后目标频率
PULS
端口指定: 0000-0003 端口指定
控制数据:
000: cw脉冲输出
脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数
001: ccw脉冲输出
脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数
002: cw脉冲输出
脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数 s 2(低四位)、s 3(高四位):减速点脉冲数(输出的此脉冲数后开始减速)
003: ccw脉冲输出
脉冲数s: s(低四位)、s 1(高四位):设定脉冲输出总数 s 2(低四位)、s 3(高四位):减速点脉冲数(输出的此脉冲数后开始减速)
004: cw脉冲输出,不定脉冲数
005: ccw脉冲输出,不定脉冲数。