振动理论及应用大作业
振动理论在固体中的应用
振动理论在固体中的应用振动理论是物理学中一门重要的理论,它研究物体在受到外力作用之后的振动行为。
在固体中,振动理论被广泛应用于多个领域,包括材料科学、机械工程以及地震学等等。
本文将对振动理论在固体中的应用进行探讨,并且分析其对相关领域的影响。
首先,振动理论在材料科学领域中有着重要的应用。
例如,在材料强度研究中,振动理论提供了一种可行的方法来评估材料的强度和稳定性。
通过分析物体在振动过程中的应力分布情况,研究人员可以预测材料是否会出现疲劳、变形或者破裂等问题,从而为材料的设计和选用提供重要参考。
此外,振动理论还被广泛应用于声学领域。
例如,在音响系统设计中,振动理论被用来分析材料的声学性能,以提高音响效果和音质。
其次,振动理论在机械工程领域中也有着广泛的应用。
例如,在机械结构的设计中,振动理论可以帮助工程师预测和解决结构的振动问题。
通过对结构的分析,工程师可以合理安排结构的材料和几何形状,以避免共振和疲劳现象的发生。
此外,振动理论还可以用于机械故障诊断和预测。
通过监测机械设备的振动特征,工程师可以及时发现并解决潜在的故障,从而提高设备的可靠性和寿命。
此外,振动理论在地震学研究中也发挥着重要作用。
地震是地球内部能量的释放,会引起地壳的振动。
利用振动理论,地震学家可以研究地震波的传播规律和地震活动的机制。
通过分析地震波的振动特征,地震学家可以预测地震的发生时间、地点和强度,并提供重要的地震预警信息。
此外,振动理论还可以用于地震建筑和结构物的设计。
通过使用抗震材料和合理的结构设计,可以减缓地震对建筑物的破坏,提高人们的安全性。
综上所述,振动理论在固体中的应用非常广泛,涵盖了材料科学、机械工程以及地震学等领域。
通过对物体振动行为的研究和分析,研究人员可以预测材料的性能、解决结构的振动问题,甚至预测地震的发生。
随着科技的不断发展,振动理论在相关领域的应用还将不断深化和拓展,为科学研究和实际应用提供更多的可能性。
振动理论习题答案

《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后的运动规律。
解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x txt x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=xx 0x 1x 12平衡位置2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角2a=h 2F =mg由动量矩定理:ah a mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ其中12cossin ≈≈θααh l ga p ha mg ml n 22222304121==⋅+θθ g h a l ga h l p T n 3π23π2π222===2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求其摆动的固有频率。
图2-3 图2-42-4 如图2-4 所示,一质量m连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
图T 2-9 答案图T 2-9解:(1)保持水平位置:m kk n 21+=ω(2)微幅转动:mglllF2112+=mgl1l2xx2xx'mglll2121+=k2k1ml1l2()()()()()()()()()mgk k l l k l k l mgk k l l k l l k l l l k l mg k k l l k l k l l l l k l l mg l mgk l l l k l l l l l l k l l mg l l l l x x k F x x x 2122122212121221221121212221212211211121212122211211121221112111 ++=+-++=+-⋅+++=⎥⎦⎤⎢⎣⎡+-++++=+-+='+=故:()22212121221k l k l k k l l k e++=mk en =ω 2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
振动理论及工程应用_天津大学中国大学mooc课后章节答案期末考试题库2023年
振动理论及工程应用_天津大学中国大学mooc课后章节答案期末考试题库2023年1.振动问题属于动力学问题中的第二类问题,即已知主动力求()。
答案:运动2.振动是指物体在平衡位置附近所做的()。
答案:往复运动3.弹簧串联、等效刚度(),弹簧并联,等效刚度()。
答案:减小增加4.在建立单自由度弹簧—质量系统的运动微分方程时,当选择物块的静平衡位置为坐标原点,假设x轴正方向垂直向下,则物块的位移、速度和加速度的正方向如何确定()。
答案:都垂直向下5.质点或质点系的运动相互影响的现象叫做()。
答案:耦联6.激振力与受迫振动的位移相位差为()时,振动系统达到共振状态。
答案:90°7.小车重P在斜面自高度h处滑下与缓冲器相撞,斜面倾角为α,缓冲弹簧刚度系数为k。
如缓冲质量不计,斜面摩擦不计,小车碰撞后,系统的自由振动周期为()。
答案:8.在图示振动系统中,已知重为P的AB杆对O轴的回转半径为ρ,物块重为Q,两个弹簧的刚度系数均为k,当系统静止时,杆处于水平。
则此系统微振动的圆频率为:()答案:9.关于主振型的正交性,下列说法错误的是()答案:零固有圆频率对应的主振型不与系统的其他主振型关于质量矩阵和刚度矩阵正交10.关于主振型矩阵和正则振型矩阵的关系是()。
答案:将主振型矩阵的各列除以其对应主质量矩阵元素的平方根,得到的振型就是正则振型11.关于主振型矩阵和正则振型矩阵下列说法错误的是()。
答案:将主振型矩阵的各列除以其对应主刚度的平方根,得到的振型就是正则振型12.瑞利第一商用()方程求解,瑞利第二商用()方程求解。
答案:作用力位移13.瑞利法估算基频的结果是精确值的(),邓克莱法估算基频的结果是精确值的()答案:上限下限14.子空间迭代法是将()与()结合起来的计算方法,它对自由度数较大系统的前若干阶固有频率及主振型非常有效。
答案:里兹法矩阵迭代法15.一维单元应变位移关系矩阵B为:()答案:16.在杆的纵向振动中,要考虑的边界条件是()答案:位移和轴向力17.以下不属于梁横向振动的近似解法的是()答案:传递矩阵法18.下列哪些是主动控制的特点()。
(整理)《振动力学》课程作业.

(整理)《振动⼒学》课程作业.《振动⼒学》2015春节学期作业⼀、⽆阻尼⾃由振动1、如图所⽰,T型结构可绕⽔平轴O作微⼩摆动,已知摆动部分的质量为w,机构绕O轴的时(即机构处于平衡位置时),两弹簧⽆转动惯量为J,两弹簧的弹簧系数均为k,且当=0伸缩,试求该机构的摆动频率。
(答案:ω)2、如图所⽰,长度为L的刚性杆件,在O点铰⽀,⾃由端固定⼀质量为m的⼩球。
在距离铰⽀端a处,由两个刚度系数为k/2的弹簧将刚性杆件⽀持在铅垂⾯内。
求该系统的固有频率。
(忽略刚性杆件和弹簧的质量)(答案:ω)3、如图所⽰,悬臂梁长为L ,截⾯抗弯刚度为EI ,梁的⾃由端有质量为m 的质量块,弹簧刚度为k ,求系统的固有频率。
(答案:ω= )4、如图所⽰,半径为R 的均质半圆柱体,在⽔平⾯内只作滚动⽽不滑动的微摆动,求其固有⾓频率。
(答案:ω=)5、如图所⽰,抗弯刚度为623010(N m )EI =?? 的梁AB ,借弹簧⽀撑于A,B 两点处,弹簧系数均为300(/)k N m = 。
忽略梁的质量,试求位于B 点左边3m 处,重量为1000()W N = 的物块⾃由振动的周期。
(答案:T=0.533s )6、⼀个重W 的⽔箱,借助四根端点嵌固的竖置管柱⽀撑着。
每根柱⼦的长为L,抗弯刚度为EI 。
试求该⽔箱顺⽔平⽅向⾃由振动的周期。
(管柱的质量忽略不计)(答案:2T = )7、《结构动⼒学基础》,第2章课后习题,第1题、第2题、第8题⼆、有阻尼⾃由振动1、如图所⽰,库伦曾⽤下述⽅法测定液体的粘性系数'c :在弹簧上悬挂⼀薄板A ,先测出薄板在空⽓中的振动周期1T ,然后测出在待测粘性系数的液体中的振动周期2T 。
设液体对薄板的阻⼒等于2A 'c v ,其中2A 为薄板的表⾯⾯积,v 为薄板的速度。
如薄板重W ,试有测得的数据1T 和2T ,求出粘性系数'c 。
空⽓对薄板的阻⼒不计。
(答案:'c =)2、物体质量为2kg ,挂在弹簧下端。
振动理论作业答案y-作业

小质量m的绝对速度为: 2 & & & & & & && va = x12 + y12 = 4R2θ 2 + x2 + 4x2θ 2 + 4Rxθ cos3θ −8Rxθ 2 sin3θ
3
第5章分析力学基础
习题
第5章分析力学基础
习题
r sinα = Rcos3θ 方法2: ΔOBA中 2 2 2 有:r = R + x − 2 Rx cos(90° − 3θ ) = R 2 + x 2 − 2 Rx sin 3θ 小质量m的绝对速度
ω
2 2
2+ 2 k = J 2
ω
2 R
k = 3J
3k ω′ = 10 J
2 R
ω
2 1
2 1
k ≈ 4J
⎫ 2 θ2 )⎪ ⎪ 2 ⎬ 2 θ2 )⎪ ⎪ 2 ⎭
方法1:广义坐标、频率和主振型都与题3-3相同。待定常数由 初始角速度为零,初始转角为[0, 0.01]T,代入下式得到。( ω 不等于 ω1和 ω2)
1 ⎤ ⎧ A1 cos (ω1t − ϕ1 ) ⎫ ⎧θ1 ⎫ ⎡ 1 ⎨ ⎬=⎢ ⎬ ⎥⎨ ⎩θ 2 ⎭ ⎣ 2 − 2 ⎦ ⎩ A2 cos (ω 2t − ϕ 2 )⎭
+
kT sin ω t ⎧ ⎫ 1 ⎬ 2 2 2 ⎨ 2 J ω − 4 Jk ω + k ⎩ ( 2 k − 2 J ω )T sin ω t ⎭
习题
⎧1 ⎪ (θ1 + θ ⎪2 1 ⎤ ⎧ y1 ⎫ −1 ⎧ 1 ⎫ 1 ⎤ 1 ⎡ 1 ⎡1 ⎨ ⎬ = [u ] ⎨ ⎬ = ⎨ [u ] = [u] = ⎢ ⎢ ⎥ ⎩θ 2 ⎭ ⎪ 1 2 J ⎣ 2 − 2 ⎦ ⎩ y2 ⎭ 2 − 2⎥ ⎣ ⎦ ⎪ 2 (θ1 − ⎩
机械振动理论及工程应用

机械振动学学习报告摘要:简述了机械振动学的发展历程,振动利用中的若干新工艺理论与技术,振动机械及其相关技术的应用与发展,介绍了振动在人类生活工作中起到了非常重要的作用。
通过对具体实例——单电机振动给料机的计算分析,得出机械振动对机器工作性能的影响。
并介绍了单自由度、多自由度的线性振动系统振动的基本理论和隔振的基本原理。
关键词:机械振动;振动给料机;线性振动系统Abstract:This paper describes the development course of study of mechanical vibration and the utilization of some new technology theory and technology. The vibration has played a very important role in human life and work. By analyzing the practical example-single motor , vibrating feeder calculation and analysis of mechanical vibration machine has influence on the performance. And introduced the single-degree-of-freedom, multi-freedom system vibration of the linear vibration of the basic theory and the basic principle of vibration isolation.Keywords:Mechanical vibration; Vibrates the feeding machine; Linear vibration system第一章绪论1.1振动振动学的发展振动振动学科是20世纪后半期逐渐形成和发展起来的一门新学科。
机械振动理论作业

1. 如图所示,一直角均质细杆,水平部分杆长为l ,质量为 m ,竖直部分杆长为l 2,质量为m 2,细杆可绕直角顶点处的固定轴O 无摩擦地转动,水平杆的未端与刚度系数为k 的弹簧相连,平衡时水平杆处于水平位置.求杆作微小摆动时的周期.解:依题意,由能量法求系统固有频率.系统动能为222121ωωV H J J T +=,其中水平部分杆的转动惯量为231ml J H =,竖直部分杆的转动惯量为2238)2)(2(31ml l m J V ==.即22222222323)3831(21θωω ml ml ml ml T ==+⨯=以平衡位置为原点,计算系统的势能:竖直部分杆的重力势能为)cos 1(2)cos 1(222θθ-=-⋅=mgl lmg U V ; 弹簧与水平部分杆组成的系统是受重力影响的弹性系统.以平衡位置为零势能位置,重力势能与弹性力势能之和相当于由平衡位置处计算变形的弹簧的单独弹性力的势能,故这部分的势能为221kx U S H =+.当杆做微小摆动时有θl x ≈.因此2221θkl U S H =+. 所以2221)cos 1(2θθkl mgl U U U S H V +-=+=+. 由能量守恒定律知 0)(=+U T dt d ,即0)21)c o s 1(223(2222=+-+θθθkl mgl ml dt d 即0sin 2322=++θθθθθθ kl mgl ml 当杆作微小摆动时,0≠θ且θθ≈sin .上式整理得,032=++θθmlklmg系统固有频率ml kl mg n 32+=ω,系统微小摆动周期klmg mlT n n +==2322πωπ. .2.求如图所示的两种情况下的固有频率.解:⑴如左图所示,悬臂梁与弹簧的受力相同,故而可视为两弹性体的串联.当有集中力作用于悬臂梁的悬空端时,其刚度为33l EIk b =,因此整个系统的等效刚度为3333333klEI EIkk lEI k l EIk k k k k b b eq +=+⋅=+⋅= 所以,忽略悬臂梁的质量得,系统固有频率)3(33kl EI m EIkmk eq n +==ω⑵如右图所示,悬臂梁与弹簧的变形相同,故而可视为三弹性体的并联. 当有集中力作用于悬臂梁的悬空端时,其刚度为33lEIk b =,因此整个系统的等效刚度为332l EIk k k k k b eq +=++=. 所以,忽略悬臂梁的质量得,系统固有频率3323mlkl EI m k eqn +==ω3.均质杆AB ,质量为M ,长为l 3,B 端刚性连接一质量为m 的 物体,其大小可略去不计.AB 杆在O 处用铰链连接,并用弹簧刚度系数均为k 的两弹簧加以约束,如图所示.试求系统自由振动的频率.解:依题意,由能量法求系统固有频率. 系统动能为222121mv J T B +=ω. 其中均质杆的转动惯量为2222241432)3(121Ml Ml Ml l M l M J B =+=⎪⎭⎫⎝⎛⋅+=,均质杆的转动角速度为θω =; 集中质量m 的线速度为l l v ωω22=⋅= 即222222221221l m M l m l M T θωω ⎪⎭⎫ ⎝⎛+=+=以平衡位置为原点,计算系统的势能:弹簧与杆组成的系统是受重力影响的弹性系统.以平衡位置为零势能位置,重力势能与弹性力势能之和相当于由平衡位置处计算变形的弹簧的单独弹性力的势能,故势能为()2222212θθkl l k kx U =≈⨯= 由能量守恒定律知 0)(=+U T dt d ,即0)221(222222=++θθθkl ml Ml dt d 0≠θ ,整理得,042=++θθmM k 即系统固有频率mM kn 42+=ω所以系统自由振动的频率mM kf n 42212+==ππω.4.如图所示,质量为2m 的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴的转动惯量为I ,忽略绳子的弹性、质量及各轴承间的摩擦力,求此系统的固有频率.解:依题意,由能量法求系统固有频率:系统的势能由两弹簧的弹性势能组成.右侧弹簧的弹性势能为22221x k U =;左侧弹簧的弹性势能为2222112211121)(21x R R k x R R k U ==.2m故系统的势能为221222121)(21x k k R R U U U +=+=系统的动能由小车平移的动能、圆盘平面运动的动能和鼓轮绕轴转动的动能组成. 其中,小车平移的动能为212112121xm v m T ==; 圆盘平面运动的动能为2222222222222224343))(21(21212121x m v m r v r m xm w J v m T ==+=+=鼓轮绕轴转动的动能为2222223321)(2121R x I R v I Iw T ===(3w 为鼓轮转动的角速度).故系统的动能为2222221321214321R x I x m x m T T T T ++=++= 设位移x 的变化规律为)sin(θω+=t A x n ,则有)cos(θω+=t Aw xn n . 因此系统最大势能为2212221max)(21A k k R R U +=; 系统最大动能为2222222221max214321n n n R A I A m A m T ωωω++= 由能量守恒定律知,max maxU T =.整理得,I R m R m R k R k n232222222212222112+++=ω 即系统的固有频率为IR m R m R k R k n 23222222221222211+++=ω5.在图示系统中以系统的平衡位置开始算起 , 盘的中央的位移当作广义坐标.假定盘很薄,并且做纯滚动.求系统的固有频率.解:依题意,由能量法求系统固有频率:系统的势能由两弹簧的弹性势能组成.(此系统是受重力影响的弹性系统.以平衡位置为零势能位置,重力势能与弹性力势能之和相当于由平衡位置处计算变形的弹簧的单独弹性力的势能),故系统的势能为22229)2(22121kx r r x k kx U p p =⋅⋅⋅+=. 系统的动能由圆盘平面运动的动能、鼓轮绕轴转动的动能和重物竖直运动的动能组成.其中圆盘平面运动的动能为2222214343212121xm mv r v mr mv T ==⎪⎭⎫⎝⎛⎪⎭⎫ ⎝⎛+=; 鼓轮绕轴转动的动能为22222121pp pp r x I r v I T =⎪⎪⎭⎫⎝⎛⋅=; 重物竖直运动的动能为()2223342221x m r r v m v m T p p =⎪⎪⎭⎫ ⎝⎛⋅=⋅=. 故系统的动能为22232121419pp r x I x m T T T T +=++= 由能量守恒定律知0)(=+U T dt d ,即0)2921419(2222=++kx r xI x m dt d p p 整理得,021992=++x r I m kxpp 所以系统的固有频率为22199pp n r I m k+=ω.6.建立图示系统运动的微分方程.以θ作为广义坐标,并假定θ很小,试求系统的固有频率.解:依题意,θ与x 的关系有,L xL x 3443==θ,即43θL x = 对支点取矩有,)(43434343kx x c x M L L x c L kx L x M M O ++-=⋅-⋅-⋅-= 刚杆的转动惯量I 为:22163)23(121mL L m I =⋅= 由动量矩定理知,)(43kx x c x M L M I O++-== θ 将43θL x =代入上式整理得,03333=++++θθθMm k M m c 所以系统的运动微分方程为:03333=++++θθθMm k M m c .其无阻尼固有频率nω为:Mm kn 33+=ω.7.求图示系统微幅扭振的周期.两个摩擦轮可分别绕水平点1O 与2O 转动,互相吻合,不能相对滑动,在图示位置(半径A O 1与B O 2在同一水平线上),弹簧不受力,弹簧系数为1k 与2k , 摩擦轮可看为等厚均质圆盘,质量为1m 与2m .解:依题意,此系统为单自由度系统,取两摩擦轮的转角21,θθ为坐标.由能量法求系统固有频率.两摩擦轮互相吻合,不能滑动,所以2121,θθθθ B A B A r r r r ==.重力势能无变化.故系统势能U 为:21221222211)(21)(21)(21θθθA B A r k k r k r k U +=⋅+⋅=两摩擦轮的转动惯量21,J J 分别为:22221121,21B A r m J r m J ==.所以系统动能T 为:2122122222121222211)(41)21(21)21(212121θθθθθ A B A r m m r m r m J J T +=⋅⋅+⋅⋅=+=由能量守恒定律知 0)(=+U T dt d ,即0))(21)(41(2122121221=+++θθA A r k k r m m dt d 整理得,0)(2121211=+++θθm m k k所以系统固有频率n ω为:2121)(2m m k k n ++=ω.其微幅振动周期n T 为:)(2222121k k m m T nn ++==πωπ.8.轮子可绕水平轴转动,对转轴的转动惯量为0J ,轮缘绕有软绳,下端挂有重是P 的物体,绳与轮缘之间无滑动.在图示位置由水平弹簧维持平衡.半径R 与a 都是已知的.求微幅振动的周期.解:依题意,由能量法求固有频率.选取轮子转动的角速度θ为坐标.此系统是受重力影响的系统,故计算总势能可由平衡位置计算,不计重力势能.系统势能U 为:22221)(21θθka a k U =⋅=重物竖直运动的速度P v 为:θR v P =,所以系统的动能为: 202220221212121θθθ J g PR J v g P T P +⋅=+⋅⋅=由能量守恒定律知 0)(=+U T dt d ,即0)212121(222022=++⋅θθθka J g PR dt d 整理得,0022=++θθJ gPRka所以系统固有频率n ω为:022J gPRka n +=ω. 其微幅振动周期n T 为:20222kaJ gPR T nn +==πωπ9.求图示两个弹簧在点O 的等值弹簧系数,刚杆AB 可以在图示平面内绕点O偏转.解:依题意,此系统为二自由度系统.取刚杆AB 两端竖直向下的方向为广义坐标21,x x ,点O 处竖直向下为0x .则有)(1210x x ba ax x -++=. 假设在点O 处有竖直向下的集中载荷0P ,则对点A 取矩有,22220)(k P b a a x b a x k a P ⋅+=⇒+⋅=⋅; 对点B 取矩有,11110)(k P b a b x b a x k b P ⋅+=⇒+⋅=⋅ 所以221222101020121210)()()(1)(b a k k b k a k P k P b a b b k P b a a a b a b a bx ax x x b a a x x ++=⋅+⋅+⋅+⋅⋅+=++=-++=等值弹簧系数0k 为:2221221222102210000)()()(bk a k b a k k b k a k P b a k k P x P k ++=++==10.求图示系统的运动方程并求临界阻尼系数与有阻尼固有频率.解:依题意,选取刚杆转动的角度θ为运动坐标.阻尼c 处速度为θa ,弹簧k 处位移为θb . 系统的转动惯量为:2ma J =.由动量矩定理得,a a c b b k J ⋅⋅-⋅⋅-=)()(θθθ即θθθ222ca kb ma --= 所以系统的运动方程为:022=++θθθma kb m c 系统无阻尼固有频率为:22makb n =ω. 临界阻尼系数为:km a bmakb m m c n c 22222===ω 阻尼比ξ为:kmb acc c c 2==ξ 系统有阻尼固有频率为:222222222)2(24)2(11mc m ka b am c a km b m a kb kmb acn d -⎪⎭⎫ ⎝⎛=-=⋅-=⋅-=ωξω11.图示系统,设轮子无侧向摆动,且轮子与绳子间无滑动,不计绳子和弹簧的质量,轮子是均质的,半径为R ,质量为M ,重物质量m ,试列出系统微幅振动微分方程,求出其固有频率.解:依题意,由能量法求固有频率.位移坐标x 方向如图所示.轮子与绳间无滑动,其转动角速度w 为:Rxw =.轮子做平面复合运动,其动能M T 为 222243)()21(2121x M R x MR x M T M =⋅⋅+=.所以系统动能T 为222143x m x M T T T m M +=+= 此系统是受重力影响的系统,故计算总势能可由平衡位置计算,不计重力势能.系统势能U 为:222)2(21kx x k U =⋅=由能量守恒定律知0)(=+U T dt d ,即0)22143(222=++kx x m x M dt d 整理得,0238=++x mM k x. 此即所求微幅振动方程. 所以系统固有频率n ω为:mM kn 238+=ω.12.鼓轮:质量M ,对轮心回转半径ρ,在水平面上只滚不滑,大轮半径R ,小轮半径r ,弹簧刚度21,k k ,重物质量为m ,不计轮D 和弹簧质量,且绳索不可伸长.求系统微振动的固有频率.解:依题意,由能量法求固有频率.鼓轮质心所在的位移坐标x 方向如图所示.此系统是受重力影响的系统,故计算总势能可由平衡位置计算,不计重力势能.系统势能U 为:221)(21x k k U +=.(两弹簧并联,等效刚度eq k 为:21k k k eq +=) 鼓轮在水平面上只滚不滑,因而其速度瞬心为鼓轮与水平面的接触点.所以鼓轮滚动的角速度ω为:Rx =ω,绳子的线速度m v 为:x R rR r R v m +=+=ω)(,鼓轮的转动惯量2ρM J C =,鼓轮做平面复合运动.系统动能T 为:2222222)()(2121)(21212121RxM x M xR r R m J x M mv T C m ⋅+++=++=ρω 即222222)()(x RR M r R m T ρ+++= 由能量守恒定律知0)(=+U T dtd,即 0))(212)()((22122222=+++++x k k x RR M r R m dt d ρ 整理得,0)()()(222221=+++++x R M r R m R k k x ρ 所以系统固有频率n ω为:)()()(222221ρω++++=R M r R m R k k n .13.试用m 的坐标与m 2的坐标写出振系的运动微分方程.刚杆AB 的重量可以不计.解:依题意,整个系统的动能为:2221222121)2(2121x m x m x m x m T +=⋅+=整个系统的势能只计算弹性势能即可.故总势能为:21222121222121)2(21)2(21)(21)(21x x k x x k l l x x x k l l x x x k U -+-=⋅-++⋅--=因此系统的质量矩阵M 为:j i ij x x Tm m m ∂∂∂= ⎥⎦⎤⎢⎣⎡=2200M 系统的刚度矩阵K 为:j i ij x x U k k k k k ∂∂∂= ⎥⎦⎤⎢⎣⎡--=25445K 所以系统的运动微分方程为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡0054452002121x x k k k k x x m m即⎭⎬⎫=+-=-+0542045212211kx kx xm kx kx xm14.刚杆本身的质量可略去不计.再设三个质量都只能沿x方向运动。
振动与波动的基本理论与应用

振动与波动的基本理论与应用振动和波动是物理学中的重要概念,它们在自然界和工程应用中都起着重要的作用。
本文将介绍振动与波动的基本理论,并探讨它们在不同领域的应用。
一、振动的基本理论1.1 振动的定义与特性振动是物体在固定参考点附近的周期性运动。
振动可以由一个简谐运动表示,即一个物体在固定点附近以固定频率和幅度往复运动。
振动的三要素包括振动的频率、幅度和相位。
1.2 振动现象与振动的形成原因振动现象广泛存在于自然界和人工环境中,例如钟摆的摆动、音叉的发声等。
振动的形成原因包括外力的作用、内力的作用以及能量的转换等,不同的振动系统具有不同的形成原因。
1.3 振动的数学描述与分析方法振动可以通过数学方法进行描述和分析。
常见的方法包括使用振动方程、运动学方程和能量守恒等原理,以及应用傅里叶分析等数学工具对振动信号进行分析。
二、波动的基本理论2.1 波动的定义与特性波动是能量传播的过程,它沿介质中的传播路径传递能量而不传递物质。
波动的基本特性包括波长、振幅、频率和传播速度等。
2.2 波动的分类与性质根据波动的传播介质和振动方向,波动可以分为机械波和电磁波。
机械波需要介质进行传播,而电磁波可以在真空中传播。
波动还具有干涉、衍射和折射等特性。
2.3 波动的数学描述与分析方法波动可以使用波动方程进行数学描述和分析。
常见的波动方程有波动方程、亥姆霍兹方程和斯涅耳定律等,利用这些方程可以对波动信号进行定量分析。
三、振动与波动的应用3.1 振动与波动在物理学中的应用振动和波动在物理学中有广泛的应用,例如声波在空气中的传播、地震波的成因及其对地壳的影响等。
振动和波动理论也被广泛应用于材料研究、电磁学和量子力学等领域。
3.2 振动与波动在工程学中的应用振动和波动在工程学中有许多重要应用,例如结构动力学研究中的振动分析、声学设计中的声波传播模拟以及电磁波在通信系统中的传输等。
振动和波动理论的应用为工程领域提供了重要的工具和方法。
机械振动大作业
F为Coriolis力与离心力等项目之和,τ
为广义主动力向量,
p为广义坐标向量
抑制原理
定义Pa、Pp分别为刚性和柔性广义坐标
向量,M、K、F、S按同样维数分块为刚性、
柔性及耦合部分;
得:
M aa a M ap p Fa a p p
M pp p K p Pp P M pa a Fp p p
振动理论与应用
S313070039
王鹏
什么是机械振动
机械振动:是指物体(或物体
系)在平衡位置(或平均位置) 附近来回往复的运动。
什么是机械振动理论
机械振动理论:是研究机械振
动的理论、技术及设备的一门的 学科。它是机械振动学、振动利 用工程等的理论基础。
机械振动研究的内容
如何提高机械系统的抗振能力; 如何防止系统产生共振; 如何避免系统自振; 减振与隔振; 冲击与冲击隔离; 噪声控制与振动利用;
仿真
机器人的尺寸为: l1=l2=l4=2m l3=l5=10m,A=P4 各杆质量为: m1=40kg,m2=m4=2kg,m3=m5=10kg 柔性杆参数为: EI=10000
仿真
仿真中设定起始位姿为: pa0=(0,0,0,0,0,0,0)T, 目标位姿为: paf= 12,6,P6,P3,P6,P3,P6T。 轨迹优化算法的各项参数为: n0=8, pop_size=30, epoch=1000, nmax=80, N=100。
i 0
n
轨迹描述
设定最前和最后3个控制点为: Pa0=Pa1=Pa2=Pa0; Pa(n-2)=Pa(n-1)=Pan=Paf;
p aj ,0 j i 3 p aj (1 ) p aj ( j 1) j p aj , i 2 j i, s s j p ( j 1), i 1 j n 1 j sj 3 sj a
多自由度系统振动理论及应用
对一些较简单的问题,用牛顿定律来建立振动微分方程是简便的.
图4-1所示为无阻尼三自由度弹簧质量系统,可参照二自由度系统的方
法,写出其微分方程:
下一页
返回
4.1
多自由度系统的振动微分方程
或更一般地写成
该式可简单地写成
式(4-2)称为用矩阵符号表示的作用力方程,它可以代表许多种运动方程
种心灵的孤独。
2. 与 个 别 人 难 以 相 处
一些学生能够与多数人保持良好的关系,但与个别人交往
不 良 。 因 此 ,常 会 影 响 情 绪 ,如 鲠 在 喉 。
上一页 下一页
返回
任 务 一了解自己与人交往的现状
3. 与 他 人 交 往 平 淡
一些学生虽然能与他人交往,但多属点头之交,没有关系
人际关系新起点
1
任 务 一 了解自己与人交往的现状
2
任 务 二 调整不良交际心态
任 务 一了解自己与人交往的现状
任 务 提 出 :了 解 自 己 与 人 交 往 的 现 状 。
任 务 目 标 :了 解 自 己 与 人 交 往 的 现 状 ,激 发 学 习 热 情 ,明 确 努
力方向。
喜欢独来独往。
(3) 嫉 妒 心 理 。 部 分 大 学 生 不 能 正 确 对 待 别 人 的 长 处 和 优
点,看到别人冒尖心里嫉妒,对比自己水平高的同学采取
讽 刺 、 挖 苦 、 打 击 、 嘲 笑 等 不 当 方 式 ,给 别 人 造 成 伤 害 ,严
重影响了同学之间的沟通。
上一页
《大学物理实验》大作业

实验课程期末大作业实验名称:简谐振动的研究实验目的:1、验证弹簧振子的运动规律,测出弹簧振子的劲度系数k;2、用图解法求弹簧的等效质量。
实验原理及设计:实验原理:将一根劲度系数为k的演簧上端固定,下端系一个质量为m的物体,如图1所示。
以物体的平变位置为坐标原点在弹簧的弹性限度内,物体离开平衡位置的位移与它所受到弹力的关系为:f=-kx (1)若忽略空气阻力,由牛顿第二定律得:(m+m₀)d²x/dt²=-kx (2)式中.m₀是弹簧的等效质量。
令w²=k/(m+m₀),则式(2)可写成:d²x/dt²+w²x=0 (3)由此可知,系统做的是简谐振动,其振动周期为:T=2兀√(m+m₀)/k或T²=4兀²m/k+4兀²m₀/k (4)公式(4)说明:T仅决定于振子本身的特性,与初始条件无关;当k一定时,T²正比于m。
实验设计:1.调节仪器将仪器焦利氏秤按照如图1所示安装。
并调节支架让小镜面及其他参与振动的物体竖直。
调节三足底座上的水平螺丝①、②及弹簧上端的夹头,使指示镜能镜面朝前自由地在指标管G中上下振动。
平衡时,转动旋钮E使指示镜上刻线与指示管上标记线及其在指示镜中的像三条线完全对齐,即三条线重合。
简称“三线重合”。
记下套杆B和游标C上的读数值,确定平衡位值,作为坐标原点。
2.测出弹簧振子的劲度系数k(1)用天平称出砝码盘和挂钩的质量M;(2)依次改变盘内砝码的质量0g、lg、2g、3g、4g、5g,增加砝码后影转动旋钮E;使“三线重合”,记下立柱B和游标C上的相应的读数值X i(i=1.2...5)(2)3.验证k一定时,T²与m成正比依次改变盘内砝码的质量0g、lg、2g、3g、4g、5g,测量对应m i的30个周期T i(i=0.1.2....5).(3)4.作T²-m图,求弹簧的劲度系数k和弹簧的等效质量m₀实验需采集的数据:(1)改变盘内砝码的质量对应的Li求劲度常数k(2)测量对应mi的30个周期Ti(i=0.1.2....5).。
振动理论及应用期末复习题题汇总

2008年振动力学期末考试试题第一题(20分)1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。
当AB 杆处于水平时为系统的静平衡位置。
试采用能量法求系统微振时的固有频率。
解:系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。
AB 转角:L y /=ϕ 系统动能:m 1动能:21121y m T =m 2动能:222222222222)31(21))(31(21)31(2121y m L y L m L m J T ====ϕω m 3动能:232232333)21(21))(21(2121ym R y R m J T ===ω 系统势能:221)21(21)21(y k y g m gy m V ++-=在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:E y k gy m gy m ym m m V T =++-++=+2212321)21(2121)2131(21 上式求导,得系统的微分方程为:E y m m m ky'=+++)2131(4321固有频率和周期为:)2131(43210m m m k++=ω2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。
试采用能量法求系统的固有频率。
解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。
物体B 动能:22121x m T =x轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R21=ω,转过的角度为x R21=θ。
机械振动大作业
《机械振动基础》大作业(2015年春季学期)题目基于MATLAB求系统特性姓名学号班级专业机械设计制造及其自动化报告提交日期2015年5月7哈尔滨工业大学报告要求1.请根据课堂布置的2道大作业题,任选其一,拒绝雷同和抄袭;2.报告最好包含自己的心得、体会或意见、建议等;3.报告统一用该模板撰写,字数不少于3000字,上限不限;4.正文格式:小四号字体,行距为1.25倍行距;5.用A4纸单面打印;左侧装订,1枚钉;6.课程报告需同时提交打印稿和电子文档予以存档,电子文档由班长收齐,统一发送至:liuyingxiang868@。
7.此页不得删除。
评语:成绩(15分):教师签名:年月日求解多自由度矩阵的认识体会。
二、MATLAB程序图clearclose%--定义质量阵和刚度阵m1 = 2;m2 = 3;m3 = 5;m4 = 8;m5 = 4;m6 = 7;m7 = 7;m8 = 11;k1 = 25;k2 = 30;k3 = 45;k4 = 60;k5 = 70;k6 = 90;k7 = 100;k8 = 110; {}{u+u Km = [m1 0 0 0 0 0 0 0;0 m2 0 0 0 0 0 0;0 0 m30 0 0 0 0;...0 0 0 m4 0 0 0 0;0 0 0 0 m5 0 0 0;0 0 00 0 m6 0 0;...0 0 0 0 0 0 m7 0;0 0 0 0 0 0 0 m8];k = [k1+k2,-k2,0,0,0,0,0,0;-k2,k2+k3,-k3,0,0,0,0,0;...0,-k3,k3+k4,-k4,0,0,0,0;0,0,-k4,k4+k5,-k5,0,0,0;...0,0,0,-k5,k5+k6,-k6,0,0;0,0,0,0,-k6,k6+k7,-k7,0;...0,0,0,0,0,-k7,k7+k8,-k8;0,0,0,0,0,0,-k8,k8];[V,D]=eig(k,m); %%--特征频率DD和振型VVfor j=1:1:8w(j)=sqrt(D(j,j)); %---特征频率fprintf('wn%d = %6.4f\n',j,w(j)); %--从小到大依次输出8个固有频率值for i=1:1:8absV(i,j)=abs(V(i,j));endendmax=max(absV); %--为了归一化取振幅最大值for j=1:1:8for i=1:1:8V(i,j)= V(i,j)/max(j); %--振幅归一化endendfigurex=1:8;for a=1:8subplot(2,4,a),plot(x,V(x,a)); %分为2*4的子图;并画出图形hold on;grid on;title('振型图');end三、MATLAB结果输入输出wn1 = 0.4332wn2 = 1.7823wn3 = 3.2255wn4 = 4.1038wn5 = 5.2021wn6 = 6.2638wn7 = 6.5306wn8 = 7.5722四、心得体会1)学习机械振动课程的体会振动的强弱用振动量来衡量,振动量可以是振动体的位移、速度或加速度。
机械振动分析与应用作业一
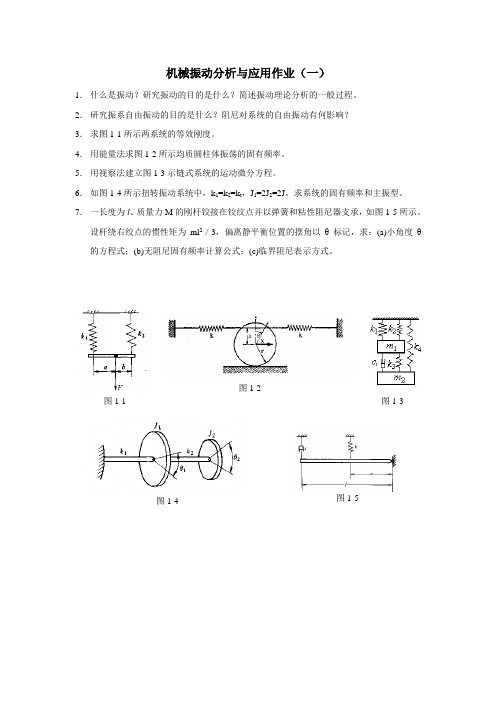
机械振动分析与应用作业(一)1.什么是振动?研究振动的目的是什么?简述振动理论分析的一般过程。
2.研究振系自由振动的目的是什么?阻尼对系统的自由振动有何影响?3.求图1-1所示两系统的等效刚度。
4.用能量法求图1-2所示均质圆柱体振荡的固有频率。
5.用视察法建立图1-3示链式系统的运动微分方程。
6.如图1-4所示扭转振动系统中,k1=k2=k t,J1=2J2=2J。
求系统的固有频率和主振型。
7.一长度为l、质量力M的刚杆铰接在铰纹点并以弹簧和粘性阻尼器支承,如图1-5所示。
设杆绕右绞点的惯性矩为ml2/3,偏离静平衡位置的摆角以θ标记,求:(a)小角度θ的方程式;(b)无阻尼固有频率计算公式;(c)临界阻尼表示方式。
图1-1图1-2图1-3 图1-4 图1-5参考答案1.答:机械或结构或状态在平衡位置附近的往复运动,称为(机械)振动。
研究振动的目的:一是掌握机械振动的规律,利用振动为人类造福;二是设法减小振动的危害。
振动理论分析的一般过程是:对于已经存在的实际振系,首先根据规则将其离散化,建立其力学模型,然后利用动力学原理建立离散化模型的运动微分方程,并求得其解析解或数值解。
最后根据方程解的形式分析振系的振动特性。
2.答:研究振系自由振动的目的是揭示振系固有的振动特性,即求出系统自由振动的固有频率和振型。
尽管阻尼对系统自由振动的固有频率影响较小(n d ωζω21-=),但阻尼对其振幅的影响却很大,它使系统自由振动的振幅按指数关系衰减。
3.解:如图所示,当O 点受力时,弹簧k 1和k 2所受载荷为F 1和F 2,则有:1bF F a b =+ 2aF F a b=+,弹簧k 1和k 2由此产生的位移为x 1和x 2,则 )(11b a k Fb x += )(22b a k Fa x +=, O 点位移为:22121212()()()o a F b a x x x x a b a b k k =+-=+++ ∴系统的等效刚度为:222012()e F a b k b a x k k +==+ 4.解:系统的动能和势能分别为:()()⎥⎦⎤⎢⎣⎡+≈⎥⎦⎤⎢⎣⎡+==+=+=222222222202212sin 2124341212121θθθθθθa r k a x k U m r m r m r J x m V 由()0=+dt U V d 得,()03422=++θθmr a r k ,故,()2234mr a r k n +=ω 。
大学物理大作业相对论振动答案
P22
4. 质子在加速器中被加速,当其动能为静止能量的4倍时,其质量为静止质量的 ( B) (A) 4倍. (B) 5倍. (C) 6倍. (D) 8倍.
E0 m0c
2
E k / E0 [ m / m0
1 1 v / c 1
2 2
1] 4 5
1 v / c
2
2
P22
B
解:动能定理仍然成立。电子动能的增量为
m 0.25 m0 0.51
D
D
解:设复合粒子质量为M 速度为 碰撞过程,动量守恒:
碰撞前后总能量守恒: > 碰撞过程中损失的能量转换成复合粒子的静质 量——静能增加
9.
1 3c . 当粒子的动能等于它的静止能量时,它的运动速度为______________ 2
m0 c
2
P23
13.观察者甲以 0.8c的速度(c为真空中光速)相对于静止的观察者乙运动, 若甲携带一质量为1 kg的物体,则 (1) 甲测得此物体的总能量为_____; (2) 乙测得此物体的总能量为______.
(SI).
-A / 2
0 = /3
A/ 2
1 / 2 3 t / 0.667
X
P28
5. 一简谐振动的振动曲线如图所示.求振动方程.
x A cos(t )
A = 10 cm
x (cm) 10 O -5 -10 2 t (s)
t=0
作业
第四章 宏观高速质点动力学
m
m0 v 1 2 c
2
相对论 质量
2 2 动能: Ek mc moc 1)
2) 静能:
《振动理论》课后习题答案

1-1一个物体放在水平台面上,当台面沿铅垂方向作频率为5 Hz的简谐振动时,要使物体不跳离平台,对台面的振幅应有何限制?解:物体与桌面保持相同的运动,知桌面的运动为,x=A sin10πt;由物体的受力分析,N = 0(极限状态)物体不跳离平台的条件为:;既有,,由题意可知Hz,得到,mm。
1-2有一作简谐振动的物体,它通过距离平衡位置为cm及cm 时的速度分别为20 cm/s及cm/s,求其振动周期、振幅和最大速度。
解:设该简谐振动的方程为;二式平方和为将数据代入上式:;联立求解得A=10.69cm;1/s;T=s当时,取最大,即:得:答:振动周期为2.964s;振幅为10.69cm;最大速度为22.63m/s。
1-3 一个机器内某零件的振动规律为,x的单位是cm,1/s 。
这个振动是否为简谐振动?试求它的振幅、最大速度及最大加速度,并用旋转矢量表示这三者之间的关系。
解:振幅A=0.583最大速度最大加速度1-4某仪器的振动规律为。
此振动是否为简谐振动?试用x- t坐标画出运动图。
解:因为ω1=ωω2=3ω,ω1≠ω2.又因为T1=2π/ω T2=2π/3ω,所以,合成运动为周期为T=2π/3ω的非简谐运动。
两个不同频率的简谐振动合成不是简谐振动,当频率比为有理数时,可合称为周期振动,合成振动的周期是两个简谐振动周期的最小公倍数。
1-5已知以复数表示的两个简谐振动分别为和,试求它们的合成的复数表示式,并写出其实部与虚部。
解:两简谐振动分别为,,则:=3cos5t+3isin5t=5cos(5t+)+3isin(5t+)或;其合成振幅为:=其合成振动频率为5t,初相位为:=arctan 则他们的合成振动为:实部:cos(5t+ arctan)虚部:sin(5t+ arctan)1-6将题1-6图的三角波展为傅里叶级数。
解∶三角波一个周期内函数x (t)可表示为,由式得n=1,2,3……于是,得x(t)的傅氏级数1-7将题1-7图的锯齿波展为傅氏级数,并画出频谱图。
机械振动大作业
《机械振动基础》大作业(2015年春季学期)题目多自由度系统的固有频率与固有振型姓名学号班级专业报告提交日期哈尔滨工业大学报告要求1.请根据课堂布置的2道大作业题,任选其一,拒绝雷同和抄袭;2.报告最好包含自己的心得、体会或意见、建议等;3.报告统一用该模板撰写,字数不少于3000字,上限不限;4.正文格式:小四号字体,行距为1.25倍行距;5.用A4纸单面打印;左侧装订,1枚钉;6.课程报告需同时提交打印稿和电子文档予以存档,电子文档由班长收齐,统一发送至:liuyingxiang868@。
7.此页不得删除。
评语:成绩(15分):教师签名:年月日一、 参数选择在该作业中,我选取了7个自由度系统,其他参数如下:取N=7,M1=2Kg ,M2=3Kg ,M3,M5=6Kg ,M6=7Kg ,M7=8Kg K1=20N/m ,K2=30N/m ,K3=40N/m ,K4=5m K7=20N/m 。
并且令初始相位角全部为0。
方程。
如上图所示系统,其刚度矩阵为代入所给定的数据,为用刚度系数法来求刚度矩阵中的元素Kij 时,Kij 表示在第j 点处发生单位位移时,需在i1222233334100000000000000N NN NN k k k k k k k k k k k k k k k -+-⎡⎤⎢⎥-+-⎢⎥⎢⎥-+=⎢⎥⎢⎥⎢⎥+-⎢⎥-⎢⎥⎣⎦K点处施加力的大小。
这对于质量-弹簧系统的多自由度系统建立振动微分方程是非常简便的,不必进行隔离体分析列方程,就可建立起运动方程。
若系统存在阻尼,则与弹簧并行的还应画出阻尼器。
对于黏性阻尼,阻尼矩阵的每一个元素cij 可以如下求得:当第j 个质量具有单位速度而其他质量的速度均为零时,要克服第j 个质量的阻尼器阻力而需在第i 个质量上施加的力的大小。
然后把阻尼力这一项加到运动方程中去,即可得到有阻尼的多自由度系统运动微分方程用刚度系数法同样也可以建立扭转振动系统微分方程,只需将作用力F 变成作用力矩M ,单位位移变成单位角位移,按上述方法分析即可质量矩阵可用类似的过程得到代入数据得质量矩阵为:1234()5678i i N m Diag ≤≤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦M所以可列出该系统的矩阵方程为:{}{}{}+=0M x K x (1)3、求解固有频率与固有振型1、固有频率设系统各质量块按照同频率和同相位作简谐振动,即:sin()i i x A t ωϕ=+代入式(1)得,1234()5678i i N m Diag ≤≤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦M222111111212211222212112222222222111222()()()0()()()0()()()0n n n n n n n n n n nn nn n K m A K m A K m A K m A K m A K m A K m A K m A K m A ωωωωωωωωω⎧-+-++-=⎪-+-++-=⎪⎨⎪⎪-+-++-=⎩这是一个关于Ai 的n 元线性齐次方程组。
物理参考解答05-振动
1 m m' m 1 T2 2 π 2π 2 π T1 k' 2k k 2
串联
8.有两个同方向同频率简谐振动,其合振动振幅为0.2m, 合振动的相位与第一个振动的相位之差为π/6,若第一 个简谐振动的振幅为 / m,则第二个简谐振动的振 π 幅为 0.1 m;,第一与第二这两个振动的相位差为 2 。
A
π6
A2
解:(1)
k 25 2π 2π 10 s -1 , T 0.2 s m 0.25 10
π 3
π 2
π 2 1 π 2
A1
π (2) x 0.02 cos(10t ) m 3 π π (3) t =10t= t= s 6 60
二、填空题
1. 两个简谐振动曲线如图所示,两个简谐振动的频率之 比ν1:ν 2=
t
2:1 ,加速度最大值之比a1m:a2m= 4:1 ,初
2
(D) 0
A/2
O
始速率之比v10:v20= 2:1 。
1)x1的周期是x2的一半, 频率之比:2:1; 2)加速度的最大值正比于频率 的平方:4:1
x1
-A
2 2
3.把单摆摆球从平衡位置向位移正方向拉开,使摆线 与竖直方向成一微小角度θ,然后由静止放手任其振动, 从放手时开始计时。若用余弦函数表示其运动方程,则 该单摆振动的初相为 π (A) (B) (C) 0 (D) 2 解答:
80 k = =20 s 1 ms(t )
解: 利用旋转矢量法,如图示, 可得第二个谐振动得振幅为0.1m,
三、计算题
1.一质量m=0.25kg的物体,在弹性恢复力作用下沿Ox轴运动, 弹簧的劲度系数k=25N·m-1。 (1) 求振动的周期T和角频率; (2) 如果振幅A=2cm,在t = 0时,物体位于x0 = 1cm处,并沿Ox轴 反方向运动,写出振动的表达式。 (3) 如果在某时刻质点位于x = -1cm,且向 x 轴正方向运动,求从 该位置回到平衡位置所需要的最短时间。
大学物理作业题
本学期全部作业题目和答案第九章 振动9-1 一个质点作简谐运动,振幅为A ,在起始时刻质点的位移为2A -,且向x 轴正方向运动,代表此简谐运动的旋转矢量为( )题9-1 图分析与解(b )图中旋转矢量的矢端在x 轴上投影点的位移为-A /2,且投影点的运动方向指向O x 轴正向,即其速度的x 分量大于零,故满足题意.因而正确答案为(b ). 9-2 已知某简谐运动的振动曲线如图(a )所示,则此简谐运动的运动方程为( )()()()()()()()()cm π32π34cos 2D cm π32π34cos 2B cm π32π32cos 2C cm π32π32cos 2A ⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡-=t x t x t x t x题9-2 图分析与解 由振动曲线可知,初始时刻质点的位移为 –A /2,且向x 轴负方向运动.图(b)是其相应的旋转矢量图,由旋转矢量法可知初相位为3/π2.振动曲线上给出质点从–A /2 处运动到+A 处所需时间为1 s ,由对应旋转矢量图可知相应的相位差3/π4Δ=,则角频率()1s 3/π4Δ/Δ-==t ω,故选(D ).本题也可根据振动曲线所给信息,逐一代入方程来找出正确答案.9-3 两个同周期简谐运动曲线如图(a ) 所示, x 1 的相位比x 2 的相位( )(A ) 落后2π (B )超前2π (C )落后π (D )超前π 分析与解 由振动曲线图作出相应的旋转矢量图(b ) 即可得到答案为(b ).题9-3 图9-4 当质点以频率ν 作简谐运动时,它的动能的变化频率为( )(A ) 2v (B )v (C )v 2 (D )v 4分析与解 简谐运动周期的一半,则频率为简谐运动频率ν的两倍.因而正确答案为(C ). 9-5 图(a )中所画的是两个简谐运动的曲线,若这两个简谐运动可叠加,则合成的余弦振动的初相位为( )(A ) π23 (B )π21 (C )π (D )0 分析与解 由振动曲线可以知道,这是两个同振动方向、同频率简谐运动,它们的相位差是π(即反相位).运动方程分别为t A x ωcos 1=和()πcos 22+=t ωA x .它们的振幅不同.对于这样两个简谐运动,可用旋转矢量法,如图(b )很方便求得合运动方程为t A x ωcos 21=.因而正确答案为(D ).9-7 若简谐运动方程为()()m π25.0π20cos 10.0+=t x ,求:(1) 振幅、频率、角频率、周期和初相;(2)s 2=t 时的位移、速度和加速度.分析 可采用比较法求解.将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量.运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果.解 (1) 将()()m π25.0π20cos 10.0+=t x 与()ϕω+=t A x cos 比较后可得:振幅A =0.10m ,角频率1s π20-=ω,初相ϕ=0.25π,则周期s 1.0/π2==ωT ,频率Hz /1T =v .(2)s 2=t 时的位移、速度、加速度分别为()m 1007.7π25.0π40cos 10.02-⨯=+=t x()-1s m 44.4π25.0π40sin π2d /d ⋅-=+-==t x v()-22222s m 1079.2π25.0π40cos π40d /d ⋅⨯-=+-==t x a9-14 某振动质点的x -t 曲线如图(a )所示,试求:(1) 运动方程;(2) 点P 对应的相位;(3) 到达点P 相应位置所需的时间.分析 由已知运动方程画振动曲线和由振动曲线求运动方程是振动中常见的两类问题.本题就是要通过x -t 图线确定振动的三个特征量A 、ω和0ϕ,从而写出运动方程.曲线最大幅值即为振幅A ;而ω、0ϕ通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便.解 (1) 质点振动振幅A =0.10 m.而由振动曲线可画出t 0 =0 和t 1 =4 s时旋转矢量,如图(b ) 所示.由图可见初相3/π0-=(或3/π50=),而由()3201//ππω+=-t t 得1s 24/π5-=ω,则运动方程为()m 3/π24π5cos 10.0⎪⎭⎫ ⎝⎛-=t x题9-14 图(2) 图(a )中点P 的位置是质点从A /2 处运动到正向的端点处.对应的旋转矢量图如图(c ) 所示.当初相取3/π0-=时,点P 的相位为()000=-+=p p t ωϕϕ(如果初相取成3/π50=,则点P 相应的相位应表示为()π200=-+=p p t ω.(3) 由旋转矢量图可得()3/π0=-p t ω,则s 61.=p t .9-25 质量为0.10kg 的物体,以振幅1.0×10-2 m 作简谐运动,其最大加速度为4.0 m·s -1 求:(1) 振动的周期;(2) 物体通过平衡位置时的总能量与动能;(3) 物体在何处其动能和势能相等? (4) 当物体的位移大小为振幅的一半时,动能、势能各占总能量的多少?分析 在简谐运动过程中,物体的最大加速度2max ωA a =,由此可确定振动的周期T .另外,在简谐运动过程中机械能是守恒的,其中动能和势能互相交替转化,其总能量E =kA 2/2.当动能与势能相等时,E k =E P =kA 2/4.因而可求解本题.解 (1) 由分析可得振动周期s 314.0/π2/π2max ===a A ωT(2) 当物体处于平衡位置时,系统的势能为零,由机械能守恒可得系统的动能等于总能量,即J 100221213max 22k -⨯====.mAa mA E E ω(3) 设振子在位移x 0 处动能与势能相等,则有42220//kA kx =得 m 100772230-⨯±=±=./A x(4) 物体位移的大小为振幅的一半(即2x A =/)时的势能为4221212P /E A k kx E =⎪⎭⎫ ⎝⎛== 则动能为 43P K /E E E E =-=9-28 已知两同方向、同频率的简谐运动的运动方程分别为()()m π75.010cos 05.01+=t x ;()()m π25.010cos 06.02+=t x .求:(1) 合振动的振幅及初相;(2) 若有另一同方向、同频率的简谐运动()()m 10cos 07033ϕ+=t x .,则3ϕ为多少时,x 1 +x 3 的振幅最大? 又3ϕ 为多少时,x 2 +x 3 的振幅最小?题9-28 图分析 可采用解析法或旋转矢量法求解.由旋转矢量合成可知,两个同方向、同频率简谐运动的合成仍为一简谐运动,其角频率不变;合振动的振幅()12212221cos 2ϕϕ-++=A A A A A ,其大小与两个分振动的初相差12ϕϕ-相关.而合振动的初相位()()[]22112211cos cos sin sin arctan ϕϕϕϕϕA A A A ++=/解 (1) 作两个简谐运动合成的旋转矢量图(如图).因为2/πΔ12-=-=,故合振动振幅为 ()m 1087cos 2212212221-⨯=-++=.ϕϕA A A A A 合振动初相位()()[]rad1.48arctan11cos cos sin sin arctan 22112211==++=ϕϕϕϕϕA A A A / (2) 要使x 1 +x 3 振幅最大,即两振动同相,则由π2Δk =得,...2,1,0,π75.0π2π213±±=+=+=k k k要使x 1 +x 3 的振幅最小,即两振动反相,则由()π12Δ+=k 得 (),...2,1,0,π25.1π2π1223±±=+=++=k k k第十章 波 动10-1 图(a )表示t =0 时的简谐波的波形图,波沿x 轴正方向传播,图(b )为一质点的振动曲线.则图(a )中所表示的x =0 处振动的初相位与图(b )所表示的振动的初相位分别为( )题10-1 图(A) 均为零 (B) 均为2π (C) 均为2π-(E) 2π-与2π 分析与解 本题给了两个很相似的曲线图,但本质却完全不同.求解本题要弄清振动图和波形图不同的物理意义.图(a )描述的是连续介质中沿波线上许许多多质点振动在t 时刻的位移状态.其中原点处质点位移为零,其运动方向由图中波形状态和波的传播方向可以知道是沿y 轴负向,利用旋转矢量法可以方便的求出该质点振动的初相位为π/2.而图(b )是一个质点的振动曲线图,该质点在t =0 时位移为0,t >0 时,由曲线形状可知,质点向y 轴正向运动,故由旋转矢量法可判知初相位为-π/2,答案为(D ).10-2 机械波的表达式为()()m π06.0π6cos 05.0x t y +=,则( )(A) 波长为100 m (B) 波速为10 m·s-1(C) 周期为1/3 s (D) 波沿x 轴正方向传播分析与解 波动方程的一般表式为⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛=ϕωu x t A y cos ,其中A 为振幅,φ为初相,u 为波速.x /u 前的“-”表示波沿x 轴正向传播,“+”表示波沿x 轴负向传播.因此将原式写为()()()m 100/π6cos 05.0x t y +=和一般式比较可知(B)、(D) 均不对.而由ω=2π/T=6πs-1 可知T =(1/3)s.则λ=uT =33.3 m ,因此(A)也不对.只有(C)正确.10-3 一平面简谐波,沿x 轴负方向传播,角频率为ω,波速为u .设4T t =时刻的波形如图(a )所示,则该波的表达式为( ) ()()()()⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛+=⎥⎦⎤⎢⎣⎡-⎪⎭⎫ ⎝⎛+=⎥⎦⎤⎢⎣⎡-⎪⎭⎫ ⎝⎛-=⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛-=πωπωπωπωu x t A y u x t A y u x t A y u x t A y cos B 2cos C 2cos B cos A题10-3 图分析与解 因为波沿x 轴负向传播,由上题分析知(A)、(B )表式不正确.找出(C )、(D )哪个是正确答案,可以有很多方法.这里给出两个常用方法.方法一:直接将t =T /4,x =0 代入方程,那么对(C )有y 0 =A 、对(D )有y 0 =0,可见(D )的结果与图一致.方法二:用旋转矢量法求出波动方程的初相位.由图(a )可以知道t =T /4 时原点处质点的位移为0,且向y 轴正向运动,则此时刻的旋转矢量图如图(b )所示.要求初相位,只要将该时刻的旋转矢量反转(顺时针转)Δφ=ω·Δt =ω·T /4 =π/2,如图(b )所示,即得φ0 =π.同样得(D )是正确答案.题10-4 图10-4 如图所示,两列波长为λ的相干波在点P 相遇.波在点S 1 振动的初相是φ1 ,点S 1 到点P 的距离是r 1 .波在点S 2的初相是φ2 ,点S 2 到点P 的距离是r 2 ,以k 代表零或正、负整数,则点P 是干涉极大的条件为( )()()()()()()πλπϕϕπλπϕϕπϕϕπk r r k r r k k r r 22A 22A 2A A 211212121212=-+-=-+-=-=-//分析与解 P 是干涉极大的条件为两分振动的相位差π2Δk =,而两列波传到P 点时的两分振动相位差为()λr r /π2Δ1212---=,故选项(D )正确.10-5 在驻波中,两个相邻波节间各质点的振动( )(A ) 振幅相同,相位相同 (B ) 振幅不同,相位相同(C ) 振幅相同,相位不同 (D ) 振幅不同,相位不同分析与解 驻波方程为t λx A y v π2cos π2cos 2=,因此根据其特点,两波节间各点运动同相位,但振幅不同.因此正确答案为(B ).10-9 已知一波动方程为()()m 2-π10sin 05.0x t y =.(1) 求波长、频率、波速和周期;(2) 说明x =0 时方程的意义,并作图表示.题10-9 图分析 采用比较法.将题给的波动方程改写成波动方程的余弦函数形式,比较可得角频率ω、波速u ,从而求出波长、频率等.当x 确定时波动方程即为质点的运动方程y =y (t ).解 (1) 将题给的波动方程改写为()[]()m 2/ππx /5t π10cos 05.0--=y 与()[]0cos ϕω+-=u x t A y /比较后可得波速u =15.7 m·s-1 , 角频率ω=10πs-1 ,故有m 14.3,s 2.0/1,Hz 0.5π2/======uT l v T ωv(2) 由分析知x =0 时,方程()()m 2/ππ10cos 05.0-=t y 表示位于坐标原点的质点的运动方程(如图).10-16 平面简谐波的波动方程为()()m 24cos 080πx πt y -=..求:(1) t =2.1 s 时波源及距波源0.10m 两处的相位;(2) 离波源0.80 m 及0.30 m 两处的相位差.解 (1) 将t =2.1 s 和x =0 代入题给波动方程,可得波源处的相位π4.81=将t =2.1 s 和x ′=0.10 m 代入题给波动方程,得0.10 m 处的相位为π2.82=(2) 从波动方程可知波长λ=1.0 m .这样,x 1 =0.80 m 与x 2 =0.30 m 两点间的相位差π/Δπ2Δ=⋅=λx π10-19 如图所示,两振动方向相同的平面简谐波波源分别位于A 、B 两点.设它们相位相同,且频率均为υ=30Hz ,波速u =0.50 m·s -1 .求在P 点处两列波的相位差.分析 在均匀介质中,两列波相遇时的相位差Δφ一般由两部分组成,即它们的初相差φA -φB 和由它们的波程差而引起的相位差2πΔr /λ.本题因φA =φB ,故它们的相位差只取决于波程差.解 在图中的直角三角形ABP 中cm 5130sin o .==AP BP两列波在点P 处的波程差为Δr =AP -BP ,则相位差为π8.1/π2/π2Δ===u r Δλr Δv题10-19图10-23 如图所示,x =0 处有一运动方程为t A y ωcos =的平面波波源,产生的波沿x 轴正、负方向传播.MN 为波密介质的反射面,距波源3λ/4.求:(1) 波源所发射的波沿波源O 左右传播的波动方程;(2) 在MN 处反射波的波动方程;(3) 在O ~MN 区域内形成的驻波方程,以及波节和波腹的位置;(4) x >0区域内合成波的波动方程.题10-23 图分析 知道波源O 点的运动方程t A y ωcos =,可以写出波沿x 轴负向和正向传播的方程分别为()u x t A y /+=ωcos 1和()u x t A y /-=ωcos 2.因此可以写出y 1 在MN 反射面上P 点的运动方程.设反射波为y 3 ,它和y 1 应是同振动方向、同振幅、同频率的波,但是由于半波损失,它在P 点引起的振动和y 1 在P 点引起的振动反相.利用y 1 在P 点的运动方程可求y 3 在P 点的运动方程,从而写出反射波y 3 .在O ~MN 区域由y 1 和Y 3 两列同频率、同振动方向、同振幅沿相反方向传播的波合成形成驻波.在x >0区域是同传播方向的y 2 和y 3 合成新的行波.解 (1) 由分析已知:沿左方向和右方向传播的波动方程分别为()u x t A y /+=ωcos 1和()u x t A y /-=ωcos 2(2) y 1 在反射面MN 处引起质点P 振动的运动方程⎪⎭⎫ ⎝⎛-=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=2π3π2cos 43π2π2cos P 1t T A λλt TA y 因半波损失反射波y 3 在此处引起的振动为⎪⎭⎫ ⎝⎛-=⎪⎭⎫ ⎝⎛+-=2ππ2cos ππ23π2cos P 3t TA t T A y 设反射波的波动方程为()/π2/π2cos 3+-=λx T t A y ,则反射波在x =-3λ/4处引起的振动为 ⎪⎭⎫ ⎝⎛++=π23π2cos P 3t T A y 与上式比较得π2-=,故反射波的波动方程为⎪⎭⎫ ⎝⎛-=⎪⎭⎫ ⎝⎛--=x λt TA x λt T A y π2π2cos π2π2π2cos 3 (3) 在O ~MN 区域由y 1 和y 3 合成的驻波y 4 为()⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛+=+=t T x λA x λt T A x λt T A y y x t y π2cos π2cos 2π2π2cos π2π2cos ,314 波节的位置:4/2/,2/ππ/π2λλk x k λx +=+=,取k =-1, -2,即x =-λ/4, -3λ/4 处为波节.波腹的位置:2/,π/π2λk x k λx ==,取k =0,-1,即x =0,-λ/2 处为波腹.(4) 在x >0 区域,由y 2 和y 3 合成的波y 5 为()⎪⎭⎫ ⎝⎛-=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-=+=x λt T A x λt T A x λt T A y y x t y π2π2cos 2π2π2cos π2π2cos ,325这表明:x >0 区域内的合成波是振幅为2A 的平面简谐波.10-24 一弦上的驻波方程式为()()()m π550cos π6.1cos 100.32t x y -⨯=(1) 若将此驻波看成是由传播方向相反,振幅及波速均相同的两列相干波叠加而成的,求它们的振幅及波速;(2) 求相邻波节之间的距离;(3) 求t =3.0 ×10-3 s 时位于x =0.625 m 处质点的振动速度.分析 (1) 采用比较法.将本题所给的驻波方程,与驻波方程的一般形式相比较即可求得振幅、波速等.(2) 由波节位置的表达式可得相邻波节的距离.(3) 质点的振动速度可按速度定义v =d y /d t 求得.解 (1) 将已知驻波方程 ()()()m π550cos π6.1cos 100.32t x y -⨯=与驻波方程的一般形式()()t λx A y v π2cos /π2cos 2=作比较,可得两列波的振幅A =1.5 ×10-2 m ,波长λ=1.25 m ,频率υ=275 Hz ,则波速u =λυ=343.8m·s -1 .(2) 相邻波节间的距离为()[]()m625024124112k 1k .///==+-++=-=∆+λλλk k x x x (3) 在t =3.0 ×10-3 s 时,位于x =0.625 m 处质点的振动速度为 ()()1sm 2.46π550cos π6.1cos π5.16d /d -⋅-=-==t x t y v第十一章 光 学11-1 在双缝干涉实验中,若单色光源S 到两缝S 1 、S 2 距离相等,则观察屏上中央明条纹位于图中O 处,现将光源S 向下移动到图中的S ′位置,则( )(A ) 中央明纹向上移动,且条纹间距增大(B ) 中央明纹向上移动,且条纹间距不变(C ) 中央明纹向下移动,且条纹间距增大(D ) 中央明纹向下移动,且条纹间距不变分析与解 由S 发出的光到达S 1 、S 2 的光程相同,它们传到屏上中央O 处,光程差Δ=0,形成明纹.当光源由S 移到S ′时,由S ′到达狭缝S 1 和S 2 的两束光产生了光程差.为了保持原中央明纹处的光程差为0,它会向上移到图中O ′处.使得由S ′沿S 1 、S 2 狭缝传到O ′处的光程差仍为0.而屏上各级条纹位置只是向上平移,因此条纹间距不变.因此正确答案为(B ).题11-1 图11-2 如图所示,折射率为n 2 ,厚度为e 的透明介质薄膜的上方和下方的透明介质的折射率分别为n 1 和n 3,且n 1 <n 2 ,n 2 >n 3 ,若用波长为λ的单色平行光垂直入射到该薄膜上,则从薄膜上、下两表面反射的光束的光程差是( )()()()()2222222D 2C 22B 2A n e n e n e n e n λλλ---题11-2 图分析与解 由于n 1 <n 2 ,n 2 >n 3 ,因此在上表面的反射光有半波损失,下表面的反射光没有半波损失,故它们的光程差222λ±=∆e n ,这里λ是光在真空中的波长.因此正确答案为(B ).11-3 如图(a )所示,两个直径有微小差别的彼此平行的滚柱之间的距离为L ,夹在两块平面晶体的中间,形成空气劈形膜,当单色光垂直入射时,产生等厚干涉条纹,如果滚柱之间的距离L 变小,则在L 范围内干涉条纹的( )(A ) 数目减小,间距变大 (B ) 数目减小,间距不变(C ) 数目不变,间距变小 (D ) 数目增加,间距变小题11-3图分析与解 图(a )装置形成的劈尖等效图如图(b )所示.图中 d 为两滚柱的直径差,b 为两相邻明(或暗)条纹间距.因为d 不变,当L 变小时,θ 变大,L ′、b 均变小.由图可得L d b n '==//2sin λθ,因此条纹总数n d b L N λ//2='=,因为d 和λn 不变,所以N 不变.正确答案为(C )11-4 在单缝夫琅禾费衍射实验中,波长为λ的单色光垂直入射在宽度为3λ的单缝上,对应于衍射角为30°的方向,单缝处波阵面可分成的半波带数目为( )(A ) 2 个 (B ) 3 个 (C ) 4 个 (D ) 6 个分析与解 根据单缝衍射公式()()(),...2,1 212 22sin =⎪⎪⎩⎪⎪⎨⎧+±±=k λk λk θb 明条纹暗条纹因此第k 级暗纹对应的单缝波阵面被分成2k 个半波带,第k 级明纹对应的单缝波阵面被分成2k +1 个半波带.由题意23sin /λθ=b ,即对应第1 级明纹,单缝分成3 个半波带.正确答案为(B ).11-5 波长λ=550 nm 的单色光垂直入射于光栅常数d =1.0 ×10-4 cm 的光栅上,可能观察到的光谱线的最大级次为( )(A ) 4 (B ) 3 (C ) 2 (D ) 1分析与解 由光栅方程(),...1,02dsin =±=k λk θ,可能观察到的最大级次为()82.1/2dsin max =≤λπk 即只能看到第1 级明纹,答案为(D ).11-8 在双缝干涉实验中,两缝间距为0.30 mm ,用单色光垂直照射双缝,在离缝1.20m 的屏上测得中央明纹一侧第5条暗纹与另一侧第5条暗纹间的距离为22.78 mm .问所用光的波长为多少,是什么颜色的光?分析与解 在双缝干涉中,屏上暗纹位置由()212λ+'=k d d x 决定,式中d ′为双缝到屏的距离,d 为双缝间距.所谓第5 条暗纹是指对应k =4 的那一级暗纹.由于条纹对称,该暗纹到中央明纹中心的距离mm 27822.=x ,那么由暗纹公式即可求得波长λ.此外,因双缝干涉是等间距的,故也可用条纹间距公式λdd x '=∆求入射光波长.应注意两个第5 条暗纹之间所包含的相邻条纹间隔数为9(不是10,为什么?),故mm 97822.=∆x 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如图所示三自由度弹簧质量系统,试编写MA TLAB程序,求系统:
(1)求固有频率、主振型及正则振型;
(2)对初始条件的自由响应;
(3)对外激励的稳态响应。
参数选取:各个质量值;各段刚度值;初始条件;简谐激励
解:
(1)求固有频率、主振型及正则振型
取k1=k2=k3=k4=k,m1=m2=m,m3=m;初始条件为x1=1,x2=1,简谐激励为F1=sin t,F2=sin2t,F3=sin3t
程序:
%定义刚度矩阵和质量矩阵
%syms k m
k=1;m=1;
k1=k;k2=k;k3=k;k4=k;
m1=m;m2=m;m3=m;
k11=k1+k2;k12=-k2;k13=0;
k21=-k2;k22=k2+k3;k23=-k3;
k31=0;k32=-k3;k33=k3;
K=[k11,k12,k13;k21,k22,k23;k31,k32,k33];
M=[m1,0,0;0,m2,0;0,0,m3];
R=inv(M)*K;
%求特征值特征向量
D1=eig(R);
[p2,d]=sort(D1);
[V,Dm]=eig(R);
%求固有频率
fori=1:3
p(i,1)=sqrt(p2(i,1));
end
%求主振型和正则矩阵
fori=1:3
for j=1:3
A1(i,j)=V(i,d(j))/V(1,d(j));
end
end
Ap=A1;
Mp=Ap'*M*Ap;
Kp=Ap'*K*Ap;
fori=1:3
AN(:,i)=Ap(:,i)/sqrt(Mp(i,i));
end
MN=AN'*M*AN;
KN=AN'*K*AN;
p
Ap
AN
运行结果:
固有频率p,主振型矩阵Ap,正则振型矩阵AN如下:p =
0.4450
1.2470
1.8019
Ap =
1.0000 1.0000 1.0000
1.8019 0.4450 -1.2470
2.2470 -0.8019 0.5550
AN =
0.3280 0.7370 0.5910
0.5910 0.3280 -0.7370
0.7370 -0.5910 0.3280
(2)对初始条件的自由响应
程序:
t=[0,100];
y0=[1;0;0;0;1;0];
[T,X]=ode45(@f,t,y0);
figure;
subplot(3,1,1);
plot(T,X(:,1),'b')
title('自由响应1'),grid on
xlabel('时间t'),ylabel('位移x')
subplot(3,1,2);
plot(T,X(:,2),'r');
title('自由响应2'),grid off
xlabel('时间t'),ylabel('位移x')
subplot(3,1,3);
plot(T,X(:,3),'g');
title('自由响应3'),grid off
xlabel('时间t'),ylabel('位移x')
function dy=f(t,y)
k=1;m=1;
k1=k;k2=k;k3=k;k4=k;
m1=m;m2=m;m3=m;
k11=k1+k2;k12=-k2;k13=0;
k21=-k2;k22=k2+k3;k23=-k3;
k31=0;k32=-k3;k33=k3+k4;
dy=zeros(6,1);
dy(1)=y(4);
dy(2)=y(5);
dy(3)=y(6);
dy(4)=-1/m1*(k11*y(1)+k12*y(2)+k13*y(3)); dy(5)=-1/m2*(k21*y(1)+k22*y(2)+k23*y(3)); dy(6)=-1/m2*(k31*y(1)+k32*y(2)+k33*y(3));
结果:
(3)对外激励的稳态响应
%定义刚度矩阵和质量矩阵
%syms k m
k=1;m=1;w=1;
k1=k;k2=k;k3=k;k4=k;
m1=m;m2=m;m3=m;
k11=k1+k2;k12=-k2;k13=0;
k21=-k2;k22=k2+k3;k23=-k3;
k31=0;k32=-k3;k33=k3+k4;
K=[k11,k12,k13;k21,k22,k23;k31,k32,k33]; M=[m1,0,0;0,m2,0;0,0,m3];
%求特征值特征向量
R=inv(M)*K;
D1=eig(R);
[p2,d]=sort(D1);
[V,Dm]=eig(R);
%固有频率
for i=1:3
p(i,1)=sqrt(p2(i,1));
end
%求主振型和正则矩阵
for i=1:3
for j=1:3
A1(i,j)=V(i,d(j))/V(1,d(j));
end
end
Ap=A1;
Mp=Ap'*M*Ap;
Kp=Ap'*K*Ap;
for i=1:3
AN(:,i)=Ap(:,i)/sqrt(Mp(i,i));
end
MN=AN'*M*AN;
KN=AN'*K*AN;
F1=[1;0;0];
F2=[0;2;0];
F3=[0;0;3];
QN1=AN'*F1*sin(w*t);
QN2=AN'*F2*sin(2*w*t);
QN3=AN'*F3*sin(3*w*t);
b1=[1/(p2(1,1)-w^2),0,0;
0,1/(p2(2,1)-w^2),0;
0,0,1/(p2(3,1)-w^2)];
b2=[1/(p2(1,1)-(2*w)^2),0,0;
0,1/(p2(2,1)-(2*w)^2),0;
0,0,1/(p2(3,1)-(2*w)^2)];
b3=[1/(p2(1,1)-(3*w)^2),0,0;
0,1/(p2(2,1)-(3*w)^2),0;
0,0,1/(p2(3,1)-(3*w)^2)]; XN1=b1*QN1;
XN2=b2*QN2;
XN3=b3*QN3;
T=20;
t=1:0.1:T;
X=AN*XN1+AN*XN2+AN*XN3; figure;
subplot(3,1,1);
plot(t,X(1,:),'g');
title('稳态响应1'),grid on xlabel('时间t'),ylabel('位移x') subplot(3,1,2);
plot(t,X(2,:),'r:');
title('稳态响应2'),grid off xlabel('时间t'),ylabel('位移x') subplot(3,1,3);
plot(t,X(3,:),'b-.');
title('稳态响应3'),grid off xlabel('时间t'),ylabel('位移x')
结果:。