东北大学自动化控制系统计算机辅助设计实验模板
《计算机辅助设计电子CAD》实验指导书
《计算机辅助设计(电子CAD)》实验指导书姓名:院系:班级:学号:2013年1月目录实验一Protel 99SE 使用基础...................................................................... 错误!未定义书签。
实验二绘制原理图——555震荡电路. (5)实验三绘制原理图——晶体测试电路 (7)实验四元件库的制作................................................................................... 错误!未定义书签。
实验五生成电路原理图报表....................................................................... 错误!未定义书签。
实验六工程实例——绘制I/V信号变换调理电路原理图 (15)实验七熟悉PCB编辑环境和设计系统 ..................................................... 错误!未定义书签。
实验八人工布线制作PCB——555震荡电路 . (20)实验九自动布线制作PCB——晶体测试电路 (24)实验十PCB元件库的制作 .......................................................................... 错误!未定义书签。
实验十一工程实例——绘制I/V信号变换调理电路PCB ....................... 错误!未定义书签。
实验十二电路仿真 (32)实验一Protel 99SE 使用基础一、实验目的1、熟悉Protel 99 SE 的设计界面,熟练掌握对设计数据库中的文件夹和文件的操作。
2、掌握设计数据库的概念,以及建立、打开和关闭等操作。
3、熟练原理图设计环境。
计算机辅助设计实验报告(实验一)
数字化设计实验报告学院 课程名称 实验项目名称 年级、专 业、班 姓名 数字化建筑设计Ⅰ (实验一)—— AutoCAD 概述:二维图形的创建 学号一、实验目的(1) (2) (3) (4) (5) (6) (7) (8) 掌握AutoCAD的主要功能和工作界面介绍。
掌握AutoCAD2008的图形文件管理和帮助系统。
初步掌握命令的调用和坐标系。
初步认识建立和使用图层管理。
学习了解直线(line)命令绘制图形,圆(circle)和圆弧(arc)命令绘制图形。
学习了解构造线(pline)命令,椭圆(ellipes)命令,样条曲线(spline)命令。
学习利用矩形(rectang)命令、正多边形(polygon)命令绘制图形。
学会使用填充(bhatch)命令为图形填充所需要的颜色。
二、实验设备实验设备要求每个学生一台电脑,并装有 AutoCAD2008。
三、实验内容1.完成二维图形基本绘制和编辑训练。
设计一副卡通画,内容:房屋,树木,道路, 动物等,以一小片居住区或小村庄为主题。
2.学习二维图形基本绘制训练,完成课本 P43 中 1、2 题。
3.用上面卡通画设计步骤、内容为主题完成下面的实验报告。
四、实验步骤和结果 (一)实验步骤1、 图形界限设置以 A4 图纸大小(420×297)为标准。
命令: '_limits 重新设置模型空间界限: 指定左下角点或 [开(ON)/关(OFF)] <0.0000,0.0000>: 指定右上角点 <420.0000,297.0000>: 命令: z ZOOM 指定窗口的角点,输入比例因子 (nX 或 nXP),或者[全部(A)/中心(C)/动态(D)/范围(E)/上一个(P)/比例(S)/窗口(W)/对象(O)] <实时>: a 正在重生成模型。
2、 设置图层——根据需要的颜色和内容设置图层。
实验报告《计算机辅助设计I》
实验结果:(程序清单及运行结果) 数据文件化过程的程序:
建立程序,定义并 初始化数据
连接相关数据生 成一个记录
printf("*****************************************\n ");
}
} printf("************THE END***************\n\n\n\n"); fclose(fp); }
(2) 将实验一中“标准三角胶带型号及断面尺寸数表 输出文件程序: #include<stdlib.h> #include<conio.h>
机械工程及自动化
班级
机械 11-5 班 实验项目
实验二 数据文件化实验
课程名称
计算机辅助设计 I
课程代码
0100151
实验时间 批改意见
实验地点 成绩
CAD 中心
教师签字: 实验目的:
1、学习 C 语言程序的设计方法。 2、初步掌握顺序数据文件和随机数据文件的建立、读取方法。 实验内容:
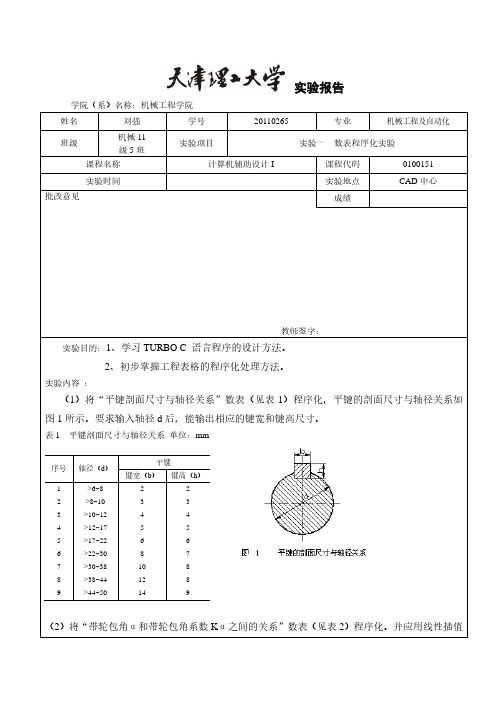
(1)将实验一中“平键剖面尺寸与轴径关系数表”进行文件化处理,编写顺序文件的建立与读取程序。
平键
键宽(b) 键高(h)
2
2
3
3
4
4
5
5
6
6
8
7
10
8
12
8
14
9
(2)将“带轮包角α和带轮包角系数 Kα之间的关系”数表(见表 2)程序化。并应用线性插值
上机三 控制系统的计算机辅助设计 实验报告
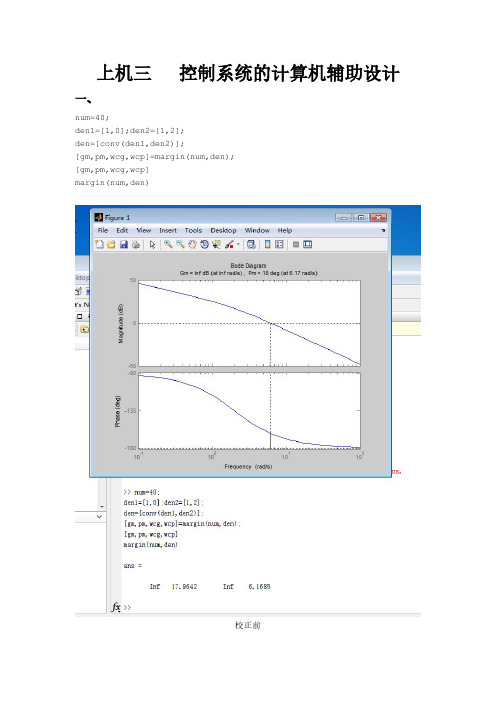
上机三控制系统的计算机辅助设计一、num=40;den1=[1,0];den2=[1,2];den=[conv(den1,den2)];[gm,pm,wcg,wcp]=margin(num,den);[gm,pm,wcg,wcp]margin(num,den)校正前num=40;den1=[1,0];den2=[1,2];den=[conv(den1,den2)];[gm,pm,wcg,wcp]=margin(num,den);[gm,pm,wcg,wcp]margin(num,den)for epsilon=5:15phic=(r-r0+epsilon)*pi/180;alpha=(1+sin(phic))/(1-sin(phic));[i1,ii]=min(abs(mag1-1/sqrt(alpha)));wc=w(ii);T=1/(wc*sqrt(alpha));numc=[alpha*T,1];denc=[T,1];[num,den]=series(num0,den0,numc,denc);[Gm,Pm,Wcg,Wcp]=margin(num,den);if(Pm>=r);break,endendprintsys(numc,denc)printsys(num,den)[mag2,phase2]=bode(numc,denc,w);[mag,phase]=bode(num,den,w);subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*log10(mag2),'-'); %grid;ylabel('幅值(dB)');title('--G0,-.Gc,G0Gc');subplot(2,1,2);semilogx(w,phase,w,phase1,'--',w,phase2,'-.',w,(w-180-w),':');%grid;ylabel('相角(度)');xlabel('频率(rad/sec)')title(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB',',','相角裕量=',num2str(Pm),'度']);disp(['校正前:幅值裕量=',num2str(20*log10(Gm1)),'dB',',','相角裕量=',num2str(Pm1),'度']);disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB',',','相角裕量=',num2str(Pm),'度']);二、numo=5;deno=conv([10],conv([11],[0.251]));bode(numo,deno);[Gm,Pm,Wcg,Wcp]=margin(numo,deno);disp(['幅值裕量=',num2str(20*log10(Gm)),'dB','相角裕量=',num2str(Pm),'度'])numo=5;deno=conv([10],conv([11],[0.251]));[Gm1,Pm1,Wcg1,Wcp1]=margin(numo,deno);r=40;w=logspace(-3,1);[mag1,phase1]=bode(numo,deno,w);for epsilon=5:12r0=(-180+r+epsilon);[i1,ii]=min(abs(phase1-r0));wc=w(ii);alpha=mag1(ii);T=5/wc;numc=[T,1];denc=[alpha*T,1];[num,den]=series(numo,deno,numc,denc);[Gm,Pm,Wcg,Wcp]=margin(num,den);if(Pm>=r);break,end;endprintsys(numc,denc)printsys(num,den)[mag2,phase2]=bode(numc,denc,w);[mag,phase]=bode(num,den,w);subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*lo g10(mag2),'-');%grid;ylabel('幅值(dB)');title('--G0,-.Gc,G0Gc');subplot(2,1,2);semilogx(w,phase,w,phase1,'--',w,phase2,'-.',w,(w-180-w),':');%grid;ylabel('相角(度)');xlabel('频率(rad/sec)');title(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB',',','相角裕量=',num2str(Pm),'度']);disp(['校正前:幅值裕量=',num2str(20*log10(Gm1)),'dB',',','相角裕量=',num2str(Pm1),'度']);disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB',',','相角裕量=',num2str(Pm),'度']);。
[工学]东北大学秦皇岛分校毕业设计——自动化——测控技术与仪器[管理资料]
![[工学]东北大学秦皇岛分校毕业设计——自动化——测控技术与仪器[管理资料]](https://img.taocdn.com/s3/m/2439c9b2336c1eb91b375d3f.png)
毕业设计(论文)基于PLC的模糊PID水箱液位控制系统设计系别自动化工程系专业名称测控技术与仪器班级学号5080926学生姓名杨微指导教师吕江涛2012年6月15日基于PLC的模糊PID水箱液位控制系统设计摘要常规PID控制器结构简单、稳定性好、工作可靠,被广泛应用于过程控制中,但常规的PID在系统参数、工作环境发生变化时往往不能获得较好的控制效果。
采用基于PLC 知识和不依赖精确数学模型的模糊控制来解决这类问题。
本文首先通过机理法建立液位控制系统水箱的数学模型,为了改善调节过程的动态特性,采用串级控制,主调节器用模糊控制,副调节器采用PID控制。
根据液位系统的特征,选取合适的模糊控制规则和隶属度函数,建立模糊控制规则查询表,设计PID控制器和模糊控制器,将设计好的串级系统在Simulink软件上进行仿真,比较常规PID 控制器和模糊PID控制器的控制性能。
通过西门子SIMATIC S7-300 PLC 。
,将设计好的液位控制系统进行仿真。
实验表明模糊控制器具有良好的动、静态控制效果。
关键词:过程控制,PID控制,模糊控制,PLC,力控组态软件Based on PLC fuzzy PID water level control system designAuthor:Yang WeiTutor:Lv JiangtaoAbstractThe conventional PID controller simple structure, good stability, reliable working, are widely used in process control, but the conventional PID parameters in the system, working environment change often cannot obtain the good control effect. Based on PLC knowledge and not rely on the accurate mathematical model of fuzzy control to solve the problem.This paper first through the mechanism of water level control system method to establish the mathematical model, in order to improve the dynamic characteristics of the regulatory process, the cascade control, regulation is the fuzzy control, vice regulator PID control. According to the characteristics of liquid level system, to select the suitable fuzzy control rules and membership functions, establish the fuzzy control rules lookup, PID controller and fuzzy controller design, the design good ship machine system in Simulink software, and simulation is the conventional PID controller and fuzzy PID controller control performance.Through the Siemens SIMATIC S7-300 PLC programming system and the force control configuration software design of the Siemens PLC conventional PID systems and fuzzy PID control algorithm. Through the configuration software force charged with real-time monitoring level changes, Will design good level control system was simulated. Experiments show that the fuzzy controller has good dynamic and static control effect.Key Words: Process control, PID control, Fuzzy control, PLC, Force contro目录1 绪论 0过程控制概述 0模糊控制理论的产生和发展状况 (1)PLC的特点及发展状况 (2)PLC的特点 (2)PLC技术发展动向 (4)可编程控制器的硬件组成 (5)课题研究的主要内容与论文结构 (5)课题研究内容 (5)论文结构 (6)2 水箱液位控制系统设计及模型分析 (6)水箱液位串级控制系统设计 (6)水箱液位控制系统组成及工作原理 (8)双容水箱数学模型建立与分析 (9)3 PID控制和模糊控制 (13)PID控制 (13)PID简述 (13)数字式PID控制算法 (15)模糊控制 (17)模糊控制器的基本结构 (17)模糊集合 (19)隶属度函数及其确定 (21)模糊推理 (23)液位模糊控制器的设计 (24)4 系统硬件设计 (30)西门子S7-300PLC (30)液位控制系统组成 (31)5 PLC编程实现 (34)西门子S7-300编程基础 (34)STEP7编程 (35)控制算法的实现 (37)程序流程图 (37)梯形图程序 (39) (42)常规PID与模糊PID控制器性能比较 (43)用MATLAB模糊逻辑工具箱设计模糊控制器 (43)SIMULINK仿真 (45)结论 (47)致谢 (48)参考文献 (49)附录 (51)1绪论过程控制技术是利用测量仪表、控制仪表、计算机、通信网络等技术工具,自动获得各种变量的信息,并对影响过程状况的变量进行自动调节和操作,以达到控制要求等目的的技术。
《计算机辅助设计与制造》实验报告-实验2
《计算机辅助设计与制造》
实验报告II
班级:
姓名:
学号:
指导教师:
机械工程自动化学院
一、实验名称
基于Soliworks凸轮的加工仿真技术
二、实验目的
使学生能够熟练的掌握三维设计仿真软件MasterCAM的使用方法。
包括建模方法、CAD 与CAM系统之间的数据交换、加工仿真以及自动编程技术。
三、试验设备
硬件:计算机
软件:SolidWorks、MasterCAM。
四、实验内容
1.凸轮1
2.凸轮2
内容:自动数控编程:利用MasterCAM软件,绘制凸轮的二维模型,或读入试验一凸轮的三维设计模型,该模型一般采用*.IGS格式;设计零件的加工工艺规程,包括毛坯(原材料)选定,工艺顺序、切削用量和加工时间的确定等;用MasterCAM软件生成凸轮的NC 文件,实现凸轮的加工过程仿真。
基本要求:任选以上凸轮工程图之一:(1)完成凸轮的设计(2)设计零件的加工工艺规程,包括毛坯(原材料)选定,工艺顺序、切削用量和加工时间的确定等;(3)生成凸轮的NC文件,实现凸轮的加工过程仿真;
注:每人交一份实验报告;实验报告中,要有相应的实验步骤的叙述部分和一系列的图片
指导教师提供一产品原始资料包括工程图,提供计算机及网络环境,以及对实验结果的要求,实验全部由学生独立完成,一个学生完成零件加工的全部仿真过程,实现自动编程。
五、实验步骤。
北理工:自动控制实验实验报告汇总
北理工:自动控制实验实验报告汇总控制理论基础实验(基于MATLAB)控制理论基础实验班级:05611001 学号:1120211327 姓名:付予实验时间:周五下午7、8节指导教师:范哲意1控制理论基础实验(基于MATLAB)实验一:控制系统的模型建立一、实验目的1. 掌握利用MATLAB 建立控制系统模型的方法。
2. 掌握系统的各种模型表述及相互之间的转换关系。
3. 学习和掌握系统模型连接的等效变换。
二、实验原理1.系统模型的MATLAB描述 1)传递函数(TF)模型 2)零极点增益(ZPK)模型 3)状态空间(SS)模型 4)三种模型之间的转换2. 系统模型的连接在实际应用中,整个控制系统是由多个单一的模型组合而成,基本的组合方式有串联连接、并联连接和反馈连接。
三、实验内容1. 已知控制系统的传递函数如下2s2?18s?40G(s)?3 2S?5s?8s?6试用MATLAB 建立系统的传递函数模型、零极点增益模型及系统的状态空间方程模型,并绘制系统零极点图。
实验代码: >> num=[2,18,40]; >> den=[1,5,8,6];>> gtf=tf(num,den) >> gzpk=zpk(gtf)2控制理论基础实验(基于MATLAB)>> gss=ss(gtf) >> pzmap(gzpk)实验结果:传递函数模型: gtf =x1 -5 -2 -1.5 x2 4 0 0 >> grid on2 s^2 + 18 s + 40 --------------------- s^3 + 5 s^2 + 8 s + 6零极点增益模型: gzpk =2 (s+5) (s+4) -------------------- (s+3) (s^2 + 2s + 2)状态空间方程模型: gss = a =x1 x2 x3零极点图形:x3 0 1 0 b = u1 x1 4 x2 0 x3 0 c =x1 x2 x3 y1 0.5 1.125 2.5 d = u1 y1 0 3控制理论基础实验(基于MATLAB)2.已知控制系统的状态空间方程如下?0100??0??0010??0??x???ux???0001??0? ????-1-2-3-4???1?y??10200?x试用MATLAB 建立系统的传递函数模型、零极点增益模型及系统的状态空间方程模型,并绘制系统零极点图。
控制系统的计算机辅助分析实验指导书
和“magikk.txt”,分别满足上述的三个条件,可以通过下列语句生成矩阵。 Load madik.dat; Magik<CR> Load madikk.txt; Magikk<CR> 可以得到两个矩阵,它们如图 1-2 所示。
图 1-2 从外部数据文件生成矩阵 用户还可以通过所创建的M文件生成矩阵。M文件是一种包含 MATLAB 代码的文本文 件,这种文件的扩展名是“.m”。可以在 MATLAB 环境中创建,也可以在外部编辑器上创建 M文件。 例如,编写如下 magic.m 文件:
3
help ones、help eye 和 help rand。 在 MATLAB 中常常用冒号“:”来生成向量,除此之外,冒号还用来作为数组的下标,对
数组元素进行引用、增减和删除。 利用冒号来生成向量,在命令窗口输入下列式子: X=j:k
如果 j<k,则生成向量 x=[j,j+1,…,k];如果 j>k,则 x 为空向量。 对于大量的原始数据,很难直接从中找到内在规律,而把这些数据用各种形式的图形表
在图 1-1 的左下角是 command history,即命令历史记录,记录了你所输入的命令的集合。 图 1-1 的右边是 command window,也就是命令窗口,是用户输入变量、命令和函数名称的地 方。从图 1-1 中可以很方便地验证上述各个子窗口的作用和功能,同学们可以在做实验的时 候自行进行验证,例如,试着输入几个变量和操作,观察各个子窗口的变化。
a=[1 3 5;2 3 4;5 6 8] 或: a=[1,3,5;2,3,4;5,6,8] 或: a=[1,3,5
2,3,4 5,6,8] 按回车键后,命令窗口将会显示出矩阵“a”的值,并自动保存到工作空间(workspace) 中,直到退出 MATLAB 或用“clear”命令清除掉。值得注意的是,如果不需要在命令窗口 显示该矩阵或变量,可以在改行命令的结尾处加上一个分号“;”,请同学们自己在实际应用 中体会。 在 MATLAB 中,还可以从外部数据文件中读入数据生成矩阵。这些数据文件可以是 MATLAB 生成的矩阵,被存储而成的二进制文件;也可以是包含数据的文本文件,不过在这 个文本文件中,数据必须排成一个矩形,数据之间用空格分隔,文件的每行数据仅仅包含矩 阵的一行,且每行的元素的数目必须相等。 例如,在 MATLAB 环境之外,用“记事本”或其它编辑器创建两个文件“magik.dat”
计算机辅助设计及数控加工实验报告_样本

三维产品及复杂曲面CAD/CAM实验报告一、实验目的通过本次实验,熟悉产品及复杂曲面的测绘、计算机三维几何建模(CAD)和数控自动编程方法(CAM),了解数控机床的工作过程和复杂曲面零件的数控加工工艺流程。
二、实验方案及构想1、测量产品(安全阀)的各个尺寸,记录下来。
2、分析各零件在数控机床或数控加工中心上的加工工艺,确定工艺流程。
3、根据已获得的零件的各项尺寸,利用三维CAD系统(Pro/E2001)建立产品三维模型,并产生平面工程图。
4、根据已获得的零件的各项尺寸,选择合适的刀具参数,在CAM系统上进行切削模拟,先进行粗加工,然后进行精加工,确认无误后,利用CAM自动编程软件将三维模型转换为NC 代码。
5、将NC代码输入到数控机床进行产品加工。
三、实验主要结果1、产品装配图图 1 产品装配图2、安全阀体工件设计图图 2 安全阀体二维零件图3、安全阀体三维零件图图 3 安全阀体三维零件图4、安全阀体上模图图 4 安全阀体上模图5、加工工序定义图 5 安全阀体上模加工工序6、刀具路径产生图 6 安全阀体上模加工刀具路径7、数控加工程序%O0000(PROGRAM NAME - MOJU_JIAGONG)(DATE=DD-MM-YY - 29-10-03 TIME=HH:MM - 15:18)N100G21N102G0G17G40G49G80G90(3. BALL ENDMILL TOOL - 2 DIA. OFF. - 2 LEN. - 2 DIA. - 3.)N104T2M6N106G0G90G54X-60.782Y-71.103A0.S50M5N108G43H2Z60.N110Z7.562N112G1Z2.562F3.N114X-5.509N116X-5.069Z2.504N118X-4.659Z2.334N120X-4.307Z2.064N122X-4.037Z1.712N124X-3.867Z1.302N126X-3.818Z.932N128X-3.81Z.924N130X-3.793Z.455N132X-3.743Z.086N134X-3.671Z-.42N136X-3.577Z-.765N138X-3.442Z-1.237N5484X-6.672Z-1.592 N5486X-6.505Z-2.141 N5488X-6.321Z-2.651 N5490X-6.09Z-3.177 N5492X-5.848Z-3.661 N5494X-5.556Z-4.156 N5496X-5.26Z-4.609 N5498X-4.911Z-5.066 N5500X-4.565Z-5.481 N5502X-4.163Z-5.894 N5504X-3.772Z-6.265 N5506X-3.324Z-6.628 N5508X-2.892Z-6.951 N5510X-2.404Z-7.259 N5512X-1.938Z-7.529 N5514X-1.416Z-7.778 N5516X-.922Z-7.992 N5518X-.375Z-8.177 N5520X.14Z-8.331N5522X.707Z-8.451 N5524X1.235Z-8.544 N5526X1.813Z-8.596 N5528X2.348Z-8.627 N5530X2.929Z-8.61 N5532X3.463Z-8.578 N5534X4.039Z-8.492 N5536X4.564Z-8.4N5538X5.128Z-8.246 N5540X5.637Z-8.093 N5542X6.18Z-7.872 N5544X6.666Z-7.662 N5546X7.181Z-7.378 N5548X7.638Z-7.113 N5550X8.118Z-6.769 N5552X8.539Z-6.455 N5554X8.977Z-6.054 N5556X9.356Z-5.695 N5558X9.746Z-5.242 N5560X10.078Z-4.844 N5562X10.415Z-4.344 N5564X10.696Z-3.914 N5566X10.974Z-3.372 N5568X11.2Z-2.918 N5570X11.416Z-2.338 N5572X11.584Z-1.87 N5574X11.733Z-1.256 N5576X11.843Z-.784 N5578X11.92Z-.135 N5580X11.975Z.357 N5582X11.992Z.907 N5584X11.998Z.912 N5586X12.042Z1.25 N5588X12.192Z1.612 N5590X12.43Z1.923 N5592X12.741Z2.161 N5594X13.103Z2.311 N5596X13.491Z2.362 N5598X68.84N5600G0Z7.362N5602Z60.N5604M5N5606G91G28Z0.N5608G28X0.Y0.A0.N5610M30%8、切削仿真图。
《控制系统计算机辅助设计》实验指导书
《控制系统计算机辅助设计》实验指导书2012年6月目录实验一 Matlab环境熟悉与基本运算 (3)实验二 Matlab语言程序设计 (5)实验三控制系统时、频域仿真 (6)实验四控制系统模型的建立和分析 (8)实验一、Matlab环境熟悉与基本运算一、实验目的1、掌握 Matlab 软件使用的基本方法;2、熟悉 Matlab 的数据表示、基本运算方法;3、熟悉Matlab 绘图命令及基本绘图控制。
二、实验原理MATLAB环境是一种为数值计算、数据分析和图形显示服务的交互式的环境。
MATLAB有3种窗口,即:命令窗口(The Command Window)、m-文件编辑窗口(The Edit Window)和图形窗口(The Figure Window),而Simulink另外又有Simulink模型编辑窗口。
1.命令窗口(The Command Window )当MATLAB 启动后,出现的最大的窗口就是命令窗口。
用户可以在提示符“>>”后面输入交互的命令,这些命令就立即被执行。
在MATLAB 中,一连串命令可以放置在一个文件中,不必把它们直接在命令窗口内输入。
在命令窗口中输入该文件名,这一连串命令就被执行了。
因为这样的文件都是以“.m ”为后缀,所以称为m-文件。
2.m-文件编辑窗口(The Edit Window )我们可以用m-文件编辑窗口来产生新的m-文件,或者编辑已经存在的m-文件。
在MATLAB 主界面上选择菜单“File/New/M-file ”就打开了一个新的m-文件编辑窗口;选择菜单“File/Open ”就可以打开一个已经存在的m-文件,并且可以在这个窗口中编辑这个m-文件。
三、实验内容:1、矩阵运算(1)矩阵的乘法已知 A=[1 2;3 4]; B=[5 5;7 8]; 求 A^2*B(2)矩阵除法已知 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; 求 A\B,A/B(3)矩阵的转置及共轭转置已知 A=[5+i,2-i,1;6*i,4,9-i]; 求 A.', A'(4)使用冒号选出指定元素已知: A=[1 2 3;4 5 6;7 8 9];求 A 中第 3 列前 2 个元素;A 中所有列第 2,3 行的元素; (5)复数矩阵的生成: 生成矩阵⎥⎦⎤+⎢⎣⎡+j b j b e a j b a e a j b 43422311a ,若a1=3,a2=-2,a3=9,a4=23,b1=5,b2=3,b3=6,b4=33,求出矩阵的具体数值。
计算机辅助设计实验指导书-NortheasternUniversity
计算机辅助设计实验指导书东北大学资源与土木工程学院土木工程系实验一平面图绘制[实验目的]1.打开关闭保存AutoCAD文件。
2.掌握基本AutoCAD绘图操作。
3.绘制简单的土木工程图纸中的构件。
[实验设备]操作系统:Windows7软件版本:AutoCAD2008 (如图1.1所示)图1.1 AutoCAD 2008启动界面[实验原理]二维图形的绘制是CAD绘图的基础,通过对二维图形绘图命令的学习,可以掌握基本图形的绘制,包括:直线、构造线、射线、矩形、正多边形、圆、圆弧、椭圆、椭圆弧与圆环、椭圆、椭圆弧与圆环、多段线多线、点。
二维绘图命令在面板选项板中可以方便的点击达到运行相应命令的目的,或者通过命令行输入命令全称或命令的快捷命令。
图 1.2为二维绘图命令图标。
这里面包含了常用的二维图形绘制命令、二维图形编辑命令、字体输入、块的相关操作、图案填充、面域等。
图1.2 二维绘图[实验步骤]以多段线为例的绘图步骤。
实验内容:以多段线方式绘制图1.3中的图形。
图1.3 多段线示例具体步骤如下:命令行中输入pl启动多段线绘图命令。
输入起点坐标0,0。
(注:可在绘图区域任意选择起点坐标)输入w指定起点宽度为10。
指定端点宽度为10。
输入L回车,并指定直线长度为500。
(注:输入直线长度时候,鼠标应在该线直线延长线上)输入A进入到圆弧选项。
输入w指定起点宽度保持不变,端点宽度设置为0。
输入a选择圆弧包含角度,输入-180 。
(注:顺时针为负)输入r设置圆弧半径为100。
指定圆弧的弦的方向-90。
输入L切换回直线选项。
输入L设置直线长度150。
(注:输入直线长度时候,鼠标应在该线直线延长线上)输入w设置起点宽度和端点宽度分别为0和20。
输入L指定直线长度50。
输入w设置起点和端点宽度均为0。
输入L并指定直线长度为300。
输入a以同样方法设置起点和终点宽度。
输入cl使多段线闭合。
[实验练习](1)根据所学知识绘制图1.4中所示图形。
计算机辅助设计实验报告

《计算机辅助设计》实验报告实验序号:实验一实验项目名称:Creo 2.0 工作界面学号姓名专业、班实验地点指导教师实验时间一、实验目的建造一个搓衣板三围模型。
学会3D max中建立建筑三维模型技术与方法。
二、实验设备(环境)及要求硬件:CPU inter core(TM)2 duo,内存2GB,硬盘120GB操作系统:Microsoft Windows XP SP3制作软件:CREO 2.0三、实验过程与实验结果(一)建造搓衣板的矩形外壳单击“草绘”按钮,任意选择一个平面,单击草绘。
画一个长530,宽200的矩形。
再选择拉伸按钮,选择深度值拉伸值为20,单击“确定”。
矩形外壳图如下:(二)挖取搓衣板上的凹槽再次选择拉伸按钮,并单击搓衣板外壳面,在右侧绘制一个长60,宽100,左边距外壳中心线190的矩形,设置深度值拉伸为10,并选择移除材料,方向朝向另一面。
图如下:(三)绘制搓衣板沟槽部分1.利用草绘功能中的圆弧功能,选择“3点/相切端”绘制一段圆弧,具体数据如下图:2.利用“扫描”功能,,选择圆弧,并选择“移除材料”,单击“创建或编辑扫描界面”,以圆弧所在处为中心绘制如下图所示的三角形3.从左侧模型树中选择上一步的扫描,并单击“阵列”按钮,“选择方向定义列阵成员”,单击矩形外壳530的边,设置如下图并通过按钮使阵列方向指向外壳另一侧,单击滑轮,得到下图:(三)倒圆角单击“倒圆角”按钮,输入圆角半径20,再依次单击矩形外壳最短的4条棱,完成后按下鼠标滑轮。
再次单击“倒圆角”按钮,输入圆角半径10,再依次单击凹槽最短的4条棱,完成后按下鼠标滑轮。
完成后如下图:(四)去除搓衣板背部的壳单击搓衣板背部,选择“壳”按钮,设置厚度为 2.5,再单击滑轮。
最终搓衣板三维图如下:四、小节(对本次实验的心得体会、思考和建议)通过本次实验,我学会了如何在3D max中建立建筑三维模型的技术与方法。
从最初完全不会到了解3D max的相关知识,并能够使用3D max软件进行一些简单的建模操作。
王宏伟-自动控制系统课程设计任务书

东北大学秦皇岛分校控制工程学院自动控制系统课程设计设计题目专业名称自动化班级学号学生姓名指导教师王宏伟设计时间2013.7.8~2013.7.19《自动控制系统》课程设计任务书专业 自动化 班级 姓名 设计题目:双闭环直流调速系统设计与仿真 一、设计实验条件地 点:自动化系实验室 实验设备:PC 机二、设计任务晶闸管整流装置采用三相桥式全控整流电路,整流变压器∆/Y 联结。
(1)直流电动机的额定数据为220V ,136A ,1460r/min ;Ce=0.132V ·min/r,允许过载倍数为λ=1.5;(2)触发整流放大系数Ks=40;(3)整流回路总电阻R=0.5Ω(包括电枢电阻);(4)时间常数l T =0.03 s ,m T =0.18 s ;(5)电流反馈系数β=0.05V/A ;(6)转速反馈系数α=0.007V ·min/r 。
要求系统为:响应无稳态误差,电流环超调量δ≤0.05,转速环按典II 设计,并且给定输入作用下的调节时间最短。
设计要求:分别对电流环和转速环进行设计,并用Matlab 仿真分析其设计结果。
三、设计说明书的内容1、设计题目与设计任务(设计任务书)2、前言(绪论)(设计的目的、意义等)3、主体设计部分4、参考文献5、结束语四、设计时间与设计时间安排1、设计时间:7月8日~7月19日2、设计时间安排:熟悉课题、收集资料: 3天(7月8日~ 7月10日) 具体设计(含上机实验): 6天(7月11日~ 7月16日) 编写课程设计说明书: 2天(7月17日~ 7月18日) 答辩: 1天(7月19日)《自动控制系统》课程设计任务书专业自动化班级姓名设计题目:模糊PID在实际控制系统中的仿真研究一、设计实验条件地点:自动化系实验室实验设备:PC机二、设计任务了解和掌握PID功能及PID 参数整定等相关知识, 并以控制系统为研究对象,设计智能模糊PID控制器,并给出仿真结果。
控制系统计算机仿真及辅助设计实验报告

阶跃
num=[0.8,0,-20];
den=[1,0,-40,0];
sys=tf(num,den);
t=0:0.01:1;
step(sys,t)
实验图形
室温控制系统校正装置设计
已知某室温控制系统为单位负反馈,某开环传递函数为: ,试用Bode图设计法对系统进行滞后串联校正设计,使系统满足;
系统在斜坡信号作用下,系统的速度误差系数 ≥30
(2)比较这几种方法:
对于四阶龙格-库塔方法
真值
1
0.9048
0.8187
0.7408
0.6703
0.6065
0.5488
0.4966
0.4493
0.4066
0.3679
龙库
1
0.9048
0.8187
0.7408
0.6703
0.6065
0.5488
0.4966
0.4493
0.4066
0.3679
误差
step(sys,t)
单位脉冲响应图像
单位阶跃响应图像
实验二
2-2.用MATLAB语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:
1.G(s)=
2. =
Y=[0 2 0 2] X
1.解:(1)状态方程模型参数:
编写MATLAB程序如下
>> num=[1 7 24 24];
(1)m文件程序为h=0.1;
disp('函数的数值解为'); %显示‘’中间的文字%
disp('y=');%同上%
y=1;
控制系统计算机辅助设计实验报告
控制系统计算机辅助设计实验报告姓名:学号:学院:自动化学院专业:自动化2013-11实验一一、实验要求:1、用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1)(2)2、用欧拉法求下面系统的输出响应 y(t)在0≤t≤1 上,h=0.1时的数值。
y ' = -y, y(0) =1要求保留4 位小数,并将结果与真解 y(t) = e-t比较。
3、用二阶龙格库塔法求解 2 的数值解,并于欧拉法求得的结果比较。
二、实验步骤:1、求(1)的M文件如下:clear;num=[1 7 24 24];den=[1 10 35 50 24];sys=tf(num,den)[A,B,C,D]=tf2ss(num,den)[Z,P,K]=tf2zp(num,den)[R,P,H]=residue(num,den)1.1系统系数矩阵A,系统输入矩阵B,系统输出矩阵C,直接传输矩阵D分别为:所以系统的状态方程为: x(t)=A x(t)+B u(t);y(t)=C x(t)1.2零极点增益模型:G(s)=【(s+2.7306-2.8531i)(s+2.7306+2.8531i)(s+1.5388)】/【(s+4)(s+3)(s+2)(s+1)】1.3系统零点向量Z, 极点向量P,系数H分别为:部分分式形式:G(s)=4/(s+4)-6/(s+3)+2/(s+2)+1/(s+1)2.求(2)的M文件如下:clear;a=[2.25,-5,-1.25,-0.5;2.25,-4.25,-1.25,-0.25;0.25,-0.5,-1.25,-1;1.25,-1.75,-0.25,-0.75];b=[4;2;2;0];c=[0,2,0,2];d=0;sys=ss(a,b,c,d)[num,den]=ss2tf(a,b,c,d)[Z,P,K]=ss2zp(a,b,c,d)[R,P,H]=residue(num,den)2.1传递函数模型参数:G(S)=(4 s^3 + 14 s ^2+ 22 s + 15)/(s^4 + 4 s^3 + 6.25 s ^2+ 5.25 s + 2.25)2.2 系统零点向量Z, 极点向量P,系数K分别为:零极点增益模型参数:G(s)= 【4(s+1-1.2247i )(s+1+1.2247i)】/【(s+0.5-0.866i)( s+0.5+0.866i s+1.5)】2.3部分分式形式的模型参数::G (s)=4/(s+1.5)-2.3094i/(s+0.5-0.866i)+2.3094i/(s+0.5+0.866i)3原理:把 f(t,y)在[t k,y k]区间内的曲边面积用矩形面积近似代替M文件如下:cleary=1;h=0.1;j=0;for i=1:11j=j+1;a(j)=yy=y+h*(-y);endj=0;for i=0:0.1:1f=exp(-i);j=j+1;b(j)=f;endfigure(1)x=0:0.1:1;abplot(x,a,'y-*')hold onplot(x,b,'--ro')得到图形:1 0.9000 0.8100 0.7290 0.6561 0.5905 0.5314 0.4783 0.4305 0.3874 0.3487 欧拉真 1 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493 0.4066 0.36794.原理:把 f(t,y)在[t k,y k]区间内的曲边面积用上下底为f k和f k+1、高为 h 的梯形面积近似代替。
计算机辅助设计课程设计实习报告模板
成都理工大学工程技术学院计算机辅助设计课程设计实验报告专业:机械设计及制造学号:2200姓名:张三指导教师:李四2014年5月30目录1实习内容、要求及目的 .................................................................... - 1 -2 齿轮泵建模及仿真 ........................................................................... - 2 -2.1齿轮泵零件建模....................................................................... - 2 -2.1.1齿轮的建模..................................................................... - 2 -2.1.2泵体及泵盖建模............................................................. - 2 -2.1.3齿轮泵其余零件建模..................................................... - 2 -2.2齿轮泵泵盖工程图创建........................................................... - 2 -2.3齿轮泵装配及运动仿真........................................................... - 2 -3提升机建模与仿真 ............................................................................ - 3 -3.1升降总成................................................................................... - 3 -3.2提升总成................................................................................... - 3 -3.3抓取总成................................................................................... - 3 -3.4提升机其他部件....................................................................... - 3 -3.5提升机总装............................................................................... - 3 -实习总结 ............................................................................................... - 4 -1实习内容、要求及目的实习内容:1.对齿轮泵零件图及装配图进行pro/e三维建模和装配,并对泵盖三维零件运用pro/e工程图模块建立符合国标要求的二位图纸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d =
u1
y1 0
y2 0
y3 0
Continuous-time model.
>> G=tf(G)
Transfer function from input to output...
2
#1: ----------------------
s^3 + 13 s^2 + 4 s + 5
#2: 0
6
functionH=feedback(G1,G2,key)
ifnargin==2;key=-1;end,H=G1/(sym(1)-key*G1*G2);H=simple(H);
>> syms J Kp Ki s;
>> gc=(Kp*s+Ki)/s;
>> g=(s+1)/(J*s^2+2*s+5);
>> H=(z^2+0.568)/(z-1)/(z^2-0.2*z+0.99)
Transfer function:
z^2 + 0.568
-----------------------------
z^3 - 1.2 z^2 + 1.19 z - 0.99
Sampling time: 0.1
4
>> A=[0 1 0;0 0 1;-5 -4 -13];
>> plot(t,y)
>> figure;plot3(y(:,1),y(:,2),y(:,3)),grid,
2
function[y,yeq]=f2a(x)
yeq=[];
y=4*x(1)^2+x(2)^2-4;
>> Aeq=[];Beq=[];A=[];B=[];
>> xm=[0;0]; xM=[];x0=[0;0];
(s^2 + 3.667s + 3.501) (s^2 + 11.73s + 339.1) (s^2 + 203.1s + 1.07e004)
( b)
>> z=tf('z');
>> G=(35786.7*z^-1+108444)/[(z^-1+4)*(z^-1+20)*(z^-1+74.04)];
(s+12.72) (s^2 + 0.2836s + 0.3932)
5
>> num=[1,2];
>> den=[1,1,0.16];
>> H=tf(num,den,'Ts',1);
>> H
Transfer function:
z + 2
--------------
z^2 + z + 0.16
Sampling time: 1
>> gg=feedback(g*gc,1)
>> gg=feedback(g*gc,1)
gg =
((Ki + Kp*s)*(s + 1))/(J*s^3 + (Kp + 2)*s^2 + (Ki + Kp + 5)*s + Ki)
7
( a)
>> s=tf('s');
>> G=(211.87*s+317.64)/(s+20)/(s+94.34)/(s+0.1684);
东北大学自动化控制系统计算机辅助设计实验
控制系统计算机辅助设计
第
1
functiondx=lorenzeq(t,x)
dx=[-x(2)-x(3);
x(1)+0.2*x(2);
0.2+(x(1)-5.7)*x(3);]
>> x0=[0;0;0];
>> [t,y]=ode45('lorenzeq',[0,100],x0);
>> Gc=(169.6*s+400)/s/(s+4);
>> Hs=1/(0.01*s+1);
>> GG=feedback(G*Gc,Hs)
Transfer function:
359.3 s^3 + 3.732e004 s^2 + 1.399e005 s + 127056
-----------------------------------------------------------------
0.01 s^6 + 2.185 s^5 + 142.1 s^4 + 2444 s^3 + 4.389e004 s^2
+ 1.399e005 s + 127056
>> zpk(GG)
Zero/pole/gain:
35933.152 (s+100) (s+2.358) (s+1.499)
--------------------------------------------------------------------------
>> B=[0;0;2];
>> C=[1 0 0;0 0 0;0 0 0];
>> D=[0];
>> G=ss(A,B,C,D);
>> G
a =
x1 x2 x3
x1 0 1 0
x2 0 0 1
x3 -5 -4 -13
b =
u1
x1 0
x2 0
x3 2
c =ห้องสมุดไป่ตู้
x1 x2 x3
y1 1 0 0
y2 0 0 0
>> num=[2];
>> den=[1,13,4,5];
>> G=tf(num,den);
>> G
Transfer function:
2
----------------------
s^3 + 13 s^2 + 4 s + 5
>> GG=zpk(G)
Zero/pole/gain:
2
----------------------------------
>> f1=inline('x(1)^2-2*x(1)+x(2)');
>> [x,f]=fmincon(f1,x0,A,B,Aeq,Beq,xm,xM,'f2a');x',f
ans =
1.0000 0
f =
-1
3
( a)
>>s=tf('s');G=(s^3+4*s+2)/s^3/(s^2+2)/[(s^2+1)^3+2*s+5]
#3: 0
>> GG=zpk(G)
Zero/pole/gain from input to output...
2
#1: ----------------------------------
(s+12.72) (s^2 + 0.2836s + 0.3932)
#2: 0
#3: 0
根据微分方程也能够直接写出传递函数模型:
Transfer function:
s^3 + 4 s + 2
------------------------------------------------------
s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3
( b)
>> z=tf('z',0.1);