基于矢量控制的matlab仿真设计
基于MatlabSimulink的异步电机矢量控制系统仿真

基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
基于MATLAB的异步电动机直接矢量控制系统的建模和仿真资料

基于MATLAB的异步电动机直接矢量控制系统的建模和仿真***(江南大学物联网工程学院,江苏无锡214036)摘要:本文从异步电动机的数学模型着手介绍一种基于matlab/simulink的异步电动机仿真模型,使用时只需要输入不同的电机参数即可。
在此基础上设计一个典型的直接矢量控制系统,然后利用Simulink仿真软件对该控制系统运行情况进行仿真研究。
关键字:MA TLAB/SIMULINK;异步电机;矢量控制;仿真Modeling and Simulation of induction motor vector controlsystem Based on vector controlLuxiao(School of Communication and Control, Jiangnan University, Wuxi, Jiangsu 214036,China) Abstract:A simulation model of asynchronous motor is established based on MATLAB/SIMULATION according to its dynamic math-ematic model,the model can be conveniently used by inputting proper motor parameters,which is used in a typical direct vector system designed in this paper. Then the running situation of the vector control system is simulated and studied by using MATLAB/SIMULINK.Key words:MA TLAB/SIMULINK; asynchronous motor; vector control; simulation引言:异步电动机的动态数学模型是一个高阶,非线性,强耦合的多变量系统,虽然通过坐标变换可以使之降阶并化简,但并没有改变其非线性多变量的本质。
基于matlab 生成C代码的电机矢量控制仿真模型研究

重庆大学本科学生毕业设计(论文)基于matlab 生成C代码的电机矢量控制仿真模型研究学生:曾宇航学号:20114346指导教师:余传祥副教授专业:电气工程与自动化重庆大学电气工程学院二O一五年六月Graduation Design(Thesis) of Chongqing UniversityGenerated C code of motor vector control simulation model research based onMATLABUndergraduate: Zeng YuhangStudent Id:20114346Supervisor:Prof Yu ChuanxiangMajor: Electrical engineering and automationSchool of Electrical EngineeringChongqing UniversityJune 2015摘要电机在国民生产中占据重要地位,而传统的电机控制开发流程相较于工业技术的发展已经相对落后,本次毕业设计便是对一种前沿、高效的电机控制系统开发流程进行论述和验证。
课题选择研究对象为三相交流异步电机并采用矢量控制系统进行控制。
首先通过MATLAB/SIMULINK对所选电机进行建模,之后对矢量控制系统进行建模。
根据实验所选用的电机进行参数配置,配合矢量控制系统的数学模型完成整个仿真模型的构建,根据仿真结果不断矫正仿真模型、优化模型结构,并确定仿真模型的最优参数配置;然后根据仿真模型的控制模块并结合控制系统的硬件电路构建控制系统的C代码生成模型,生成所需的DSP可执行C 代码,将生成的可执行代码下载到以TI系列DSP为控制核心的硬件控制系统中进行硬件实验,矫正模型参数并验证生成代码的正确性。
在整个课题进展过程中根据生成代码的运行结果多次对仿真模型进行参数修正,并同步对代码生成模型进行修正,在如此反复过程中,优化了控制系统模型,使得生成代码能够更高效的运作,最后成功的完成了整个毕业设计,验证了此电机控制系统开发流程及生产可行性代码的正确性和可行性。
异步电动机矢量控制系统Matlab仿真研究_毕业设计论文

毕业设计论文基于Matlab的异步电动机矢量控制系统的仿真研究1 引言交流调速技术在工业领域的各个方面应用很广,对于提高电力传动系统的性能有着重要的意义,由于电力传动系统的复杂性和被控对象的特殊性,使得对它的建模与仿真一直是研究的热点。
对其仿真研究不能像控制系统那样可用各环节简化传递函数来表示,这样会有很多重要环节被忽略,完全体现不了交流调速系统的整体结构和各个环节点上的信号状态。
对电气传动系统的建模仿真力求达到与实际系统相一致,matlab提供的simulink中的电力系统工具箱(pow erlib)能很好地满足这一要求。
以往对电气传动系统的仿真研究主要集中在电机的建模和仿真[4][5],最近,许多对复杂电力传动系统的建模仿真方法已提出,主要有运用仿真工具箱对电力传动系统建模仿真[7]和将电力传动系统的功能单元模块化的仿真建模[3]。
这些方法都是在matlab/simulink环境下,结合电力系统工具箱对复杂电力传动系统建模仿真,但是没有分析powerlib运行原理。
状态空间分析方法对于电力传动系统的建模仿真是一种方便有效的方法,它被成功地应用到powerlib中,能够完成复杂电力传动系统的建模仿真,并且能够方便的进行波形分析和控制参数的调节。
本文基于文献[6][8],用状态空间方法分析powerlib中各主要元件的建模原理,给出了powerlib模块的仿真原理和使用方法,并且基于异步电动机矢量控制系统实例描述了复杂电力传动系统建模仿真的过程,分析了仿真中的实际问题,通过改进仿真方法,提高了仿真效率。
2 电力传动系统的建模和状态空间描述电力传动系统的建模包括以下几个主要部分:电力逆变器、电力半导体开关、电动机以及控制系统。
对于一个含有非线性元素的电路(例如电力电子电路)不能直接用状态空间描述,然而可以把电力电子电路分成非线性和线性两部分,线性部分用状态空间描述,非线性部分用非线性模型描述。
这样整个系统可以看作一个前向通道是线性部分,反馈通道是非线性部分的反馈系统,如图1所示。
基于MATLAB永磁同步电动机矢量控制系统的仿真研究

基于MATLAB永磁同步电动机矢量控制系统的仿真研究永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)是一种应用广泛的高性能电机。
在工业领域,PMSM通常采用矢量控制方法来实现精确的速度和位置控制。
本文基于MATLAB对PMSM矢量控制系统进行仿真研究,探讨其工作原理及性能。
首先,PMSM的矢量控制系统由控制器、电机和传感器三部分组成。
其中,控制器根据电机的反馈信号和期望输出来计算电机的控制信号。
传感器用于测量电机的转速、位置和电流等参数,反馈给控制器。
通过调节控制信号,控制器可以实现电机的速度和位置控制。
在PMSM的矢量控制系统中,通常采用dq轴矢量控制方法,将三相电流转换为直流参考轴和旋转参考轴的dq坐标系,进而对电机进行控制。
其次,本文利用MATLAB软件对PMSM矢量控制系统进行了仿真实验。
首先,建立了PMSM电机的数学模型,包括电机的动态方程、反电动势方程和电流方程。
然后,在MATLAB环境中编写程序,实现电机模型的数值求解和控制算法的计算。
通过调节控制参数,可以对电机的速度和位置进行精确控制,并实时监测电机的工作状态。
在仿真实验中,通过改变电机的负载情况、工作电压和控制参数等条件,分析了PMSM矢量控制系统的性能。
实验结果表明,当负载增加时,电机的转动惯量增大,控制系统的响应时间变长,但依然可以实现精确的速度和位置控制。
当电机的工作电压增加时,电机的输出功率和转速增大,但也会产生更大的电流和损耗。
当控制参数的比例增益和积分时间常数变化时,系统的稳定性和动态性能均会受到影响,需要进行合理的调节。
总结起来,本文基于MATLAB对PMSM矢量控制系统进行了仿真研究,探讨了其控制原理和性能。
通过仿真实验,可以深入理解PMSM矢量控制系统的工作原理,优化系统的参数和性能,并为实际应用提供参考。
异步电机矢量控制Matlab仿真实验(矢量控制部分).
学号:课程设计题目异步电机矢量控制Matlab仿真实验(矢量控制部分)学院专业班级姓名指导教师2015 年 1 月7 日目录1 设计任务及要求 (1)2 异步电动机按转子磁链定向的矢量控制系统基本原理 (1)2.1异步电动机矢量控制的基本思想 (1)2.2异步电动机矢量控制系统具体分析 (2)2 坐标变换 (3)2.1 坐标变换基本思路 (3)2.2 三相——两相坐标系变换 (4)2.3 静止两相——旋转正交变换 (5)3 转子磁链计算 (6)4 矢量控制系统设计 (7)4.1 矢量控制系统的电流闭环控制方式思想 (7)4.2 异步电动机矢量控制MA TLAB系统仿真系统设计 (8)4.3 PI调节器设计 (10)5 仿真结果 (11)5.1 电机定子侧的电流仿真结果 (11)5.2 电机输出转矩仿真结果 (12)5.3 电机的转子速度及转子磁链仿真结果 (12)心得体会 (14)参考文献 (15)摘要异步电动机具有非线性、强耦合、多变量的性质,要获得高动态性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律。
异步电动机的物理模型是一个高阶、非线性、强耦合的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。
异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
如果把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
矢量控制系统是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了按转子磁链定向矢量控制系统的电流闭环控制的设计方法。
并用MATLAB进行仿真。
关键词:异步电动机矢量控制电流闭环 MATLAB仿真异步电机矢量控制Matlab 仿真实验(矢量控制部分)1 设计任务及要求异步电动机额定数据:三相20050 2.21430r/min,14.6,0.877, 1.47s r V Hz kW N m R R ∙=Ω=Ω,,, 2015.0,2,8.160,,142.165m kg J n mH L L L mH L p m s r s ∙=====采用二相静止坐标系(α-β)下异步电机数学模型,利用MATLAB/SIMULINK 完成异步电机的矢量控制系统仿真实验。
基于MATLAB永磁同步电动机矢量控制系统的仿真研究
基于MATLAB永磁同步电动机矢量控制系统的仿真研究近年来,永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)作为一种高效率、高功率密度和高控制精度的电机,被广泛应用于工业和汽车领域。
针对永磁同步电动机的控制问题,矢量控制(Vector Control)成为了一种重要的控制策略。
本文将使用MATLAB对永磁同步电动机矢量控制系统进行仿真研究。
首先,我们需要建立永磁同步电动机的动态模型。
永磁同步电动机是一种非线性多变量系统,其数学模型可以描述为:\begin{cases}\frac{{d\theta}}{{dt}} = \Omega_m \\\frac{{d\Omega_m}}{{dt}} = \frac{1}{{J}}(T_{em} - T_{L}) \\ \frac{{di_q}}{{dt}} = \frac{1}{{L_q}}(v_q - R_s i_q -\Omega_m L_d i_d + e_f) \\\frac{{di_d}}{{dt}} = \frac{1}{{L_d}}(v_d - R_s i_d +\Omega_m L_q i_q)\end{cases}\]其中,$\theta$为转子位置,$\Omega_m$为电机机械角速度,$T_{em}$为电磁转矩,$T_{L}$为负载转矩,$i_q$和$i_d$为电流的直轴和正交轴分量,$v_q$和$v_d$为电压的直轴和正交轴分量,$R_s$为电机电阻,$L_q$和$L_d$为电机的定子轴和直轴电感,$e_f$为反电势。
接下来,我们可以使用MATLAB建立永磁同步电动机的矢量控制系统。
首先,我们需要设计控制器,其中包括速度环控制器和电流环控制器。
速度环控制器用于调节电机的机械角速度,电流环控制器用于控制电机的电流。
在速度环控制器中,我们可以选择PID控制器,其输入为速度误差,输出为电机的电压指令。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
基于MatlabSimulink的异步电机矢量控制系统仿真

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于矢量控制的matlab仿真设计

在设计VC系统时,如果忽略变频器可能产生的滞后,并认为在控制器后面的反旋转变换器 与电机内部的旋转变换环节VR相抵消,2/3变换器与电机内部的3/2变换环节相抵消,则图2中虚线框内的部分可以删去,剩下的就是直流调速系统了。可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全能够与直流调速系统相媲美。
把上述等效关系用结构图的形式画出来,得到图l。从整体上看,输人为A,B,C三相电压,输出为转速 ,是一台异步电动机。从结构图内部看,经过3/2变换和按转子磁链定向的同步旋转变换,便得到一台由 和 输入,由 输出的直流电动机。
图1 异步电动机的坐标变换结构图
1.2矢量控制系统结构
既然异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,再经过相应的坐标反变换,就能够控制异步电动机了。由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就称为矢量控制系统(VectorControlSystem),简称VC系统。VC系统的原理结构如图2所示。图中的给定和反馈信号经过类似于直流调速系统所用的控制器,产生励磁电流的给定信号 和电枢电流的给定信号 ,经过反旋转变换 一得到 和 ,再经过2/3变换得到 、 和 。把这三个电流控制信号和由控制器得到的频率信号 加到电流控制的变频器上,所输出的是异步电动机调速所需的三相变频电流。
1.1坐标变换的基本思路
坐标变换的目的是将交流电动机的物理模型变换成类似直流电动机的模式,这样变换后,分析和控制交流电动机就可以大大简化。以产生同样的旋转磁动势为准则,在三相坐标系上的定子交流电流 、 、 ,通过三相——两相变换可以等效成两相静止坐标系上的交流电流 和 ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流 和 。如果观察者站到铁心上与坐标系一起旋转,他所看到的就好像是一台直流电动机。
基于MATLAB_SIMULINK的异步电机矢量控制调速系统仿真优秀doc资料
基于MATLAB_SIMULINK的异步电机矢量控制调速系统仿真优秀doc资料文章编号:100022472(2000022*******基于M AT LAB SI M U L I NK的异步电机矢量控制调速系统仿真Ξ杨洋,张桂香(湖南大学机械与汽车工程学院,湖南长沙410082摘要:从异步电机矢量控制数学模型入手,介绍一种基于M A TLAB S I M UL I N K的异步电机按转子磁场定向的矢量控制系统仿真模型Λ该模型可通用于异步笼型电机,使用时只需输入不同电机参数即可Λ通过仿真实验验证了模型的正确性Λ关键词:异步电机;矢量控制;M A TLAB S I M UL I N K;仿真中图分类号:TM921.51文献标识码: ASi m ulati on of V ector Control Inducti on M otor A djusting Syste m Based on M A TLAB S I M UL I N KYAN G Yang,ZHAN G Gui2x iang(Co llege of M echan ical and A utomo tive Engineering,H unan U n iv,Changsha 410082,Ch inaAbstract:A si m ulati on model of vecto r con tro l inducti on mo to r adjusting syste m w ith the reference fra m e fixed to the ro to r is established.T he model can beconven ien tly used by inputting p roper mo to r para m eters.Si m ulati on s show the validity of the model.Key words:inducti on mo to r;vecto r con tro l;M A TLAB S I M UL I N K;si m ulati on0引言矢量控制理论的提出使异步电机调速性能达到甚至超过直流电机调速性能成为可能,而且运用矢量控制已成为当今交流变频调速系统的主流Λ在进行复杂的系统设计时,采取计算机仿真方法来分析和研究交流调速系统性能是非常有效和必要的Λ传统的计算机仿真软件包用微分方程和差分方程建模,直观性、灵活性差,编程量大,操作不便ΛM A TLAB是一个高度集成的软件系统,集科学计算、图象处理、声音处理于一体,具有极高的编程效率ΛM A TLAB提供的S I M UL I N K是一个用来对动态系统进行建模、仿真和分析的软件包,它具有模块化、可重栽、可封装、面向结构图编程及可视化等特点,可大大提高系统仿真的效率和可靠性ΛS I M UL I N K提供有Sink s(输出方式、Source(输入源、Ξ收稿日期:2000202229作者简介:杨洋(1970-,女,湖南长沙人,湖南大学硕士生.D iscrete (离散时间环节、L inear (线性环节、N on linear (非线性环节、Connecti on s (连接与接口、Ex tra (其他环节子模型库Λ用户可以方便定制和创建自己的模型、模块Λ在多种矢量控制方法中,按转子磁场定向的矢量控制运用较为普遍,本文将结合这种矢量控制和S I M UL I N K 的特点,介绍一种异步电机按转子磁场定向的矢量控制系统的建模仿真方法Λ模型将为同类调速系统提供有效、可靠的研究分析依据Λ1异步电机矢量控制系统的仿真模型异步电机的矢量控制相当于把直流电机换向器的功能通过控制的方法来实现,从而达到磁通和转矩单独控制的目的Λ根据感应电机的坐标变换理论,在三相坐标系下的定子输入的电流通过3s 2r 交换,由三相静止坐标变换为两相垂直的静止坐标,再通过从两相静止坐标系到两相旋转坐标系M ,T 轴的变换,并且使得M 轴沿转子总磁链矢量的方向,最终获得等效成同步旋转坐标系下的直流电流i m 1,i t 1,这样异步电机通过坐标变换,变成一台由i m 1,i t 1输入的直流电机Ζ矢量控制系统的构想就是模仿直流电机的控制方法,求得直流电机的控制量,经过相应的坐标反变换,重新获得三相输入电流(或电压,就能控制异步电机了Ζ根据异步电机理论,经坐标变换后,笼型异步电机在同步旋转坐标上按转子磁场定向的电压矩阵方程(转子短路,u m 2=u t 2=0为u m 1u t 10=R 1+L s p -Ξ1L s L m p -Ξ1L m Ξ1L s R 1+L s p Ξ1L m L m p L m p 0R 2+L r p 0Ξs L m 0Ξs L r R 2i m 1i t 1i m 2i t 2(1电机转子磁链与电流的关系为L m i m 1+L r i m 2=Ω2(2L m i t 1+L r i t 2=0(3将(2代入(1中第3行中,得:i m 2=-p Ω2R 2(4再代入(2解出i m 1:i m 1=-T 2p +1L m Ω2或得:Ω2=L m T 2p +1i m 1(5由式(1第4行可得:i t 2=-L m L r i t 1(6而由式(3第4行Ξs =-R 2Ω2i 2(7可将(6代入(7,并考虑到T 2=L r R 2,则Ξs =-L m i t 1T 2Ω2(8电机的电磁转矩公式为:T e =Mp L m L r i t 1Ω2(9电机运动方程为:T e -T l =J N pd Ξ d t (10其中,R 1,R 2为定转子电阻;T 2为转子励磁时间常数,T 2=L r R 2;L m 为定转子等效绕组间15第2期杨洋等:基于M A TLAB S I M UL I N K 的异步电机矢量控制调速系统仿真的互感,L m =(3 2L m 1;U m 1,U m 2为M T 轴坐标系中M 、T 轴定子电压;L s 为定子等效绕组的自感,L s =L m +L 11;i m 1,i t 1,i m 2,i t 2为M T 轴坐标系中M 、T 轴定向转子电流;L r 为转子等效绕组的自感,L r =L m +L 11;T e 电磁转矩;Ξ1为定子转速;N p 为极对数;Ξs 为转差;J 为转动惯量;Ξ为转子转速;Ω2为转子总磁链Ζ由上述式子可知,由于M T 坐标按转子磁场定向,在定子电流的两个分量之间实现了解耦,i m 1唯一决定磁链Ω2,当磁通不变时,i t 1则只影响转矩,与直流电机中的励磁电流和电枢电流相对应Ζ式(5,(8,(9,(10就是矢量控制的基本数学模型Ζ根据这些推导的式子,可以画出异步电机变压变频矢量控制系统结构图(图1Ζ图1中异步电机矢量变换数学模型如图2Ζ图2的模型中除根据(5,(9式绘得分解成磁通和转速的直流电机模型外,由转子频率和转差频率相加,得到定子频率信号,再经积分,即获得转子磁链的相位信号5,这是坐标变换所不可缺的参数Ζ如果将式(1展开,并代入式(2,(3,我们可以写出异步电机按转子磁场定向情况下的状态变量方程X α=A (Ξ1X +B U(11式中X =i m1i t 1Ω2,A (Ξ=ZΞ1L m R 2ΡL r -Ξ1-R 1L r ΡL m Ξ1ΡR 2L mL r 0-R 2L r ,B =L r Ρ00L r Ρ00,U =u m 1u t 1,Z =R 1L 2r +R 2L 2m ΡL r ,Ρ=L s L r -L 2m 从状态方程可以看出这是一个线性时变系统,虽然S I M UL I N K 中提供有状态方程模块,但主要是针对定常系统的,所以在S I M ULI N K 中用状态方程仿真电机系统较为不便Λ如希望用状态方程仿真,可直接在M A TLAB 中用M 文件编程建立仿真系统,只不过系统模型不如S I M UL I N K 所建的直观Λ本文主要的目的是在S I M UL I N K 下建立仿真模型,图1和图2的模型,可毫不费力地利用S I M UL I N K 提供的库模块来构建,这是后一节的重点Λ图1异步电机变压变频矢量控制系统结构图A 7R 为磁通调节器,A SR 为转速调节器25湖南大学学报(自然科学版2000年图2异步电机矢量变换数学模型2异步电机矢量控制系统的SI M UL I NK 仿真模型图1中,包含了坐标转换模块(2r 3s block ,电流控制型变频器模块(CSI block ,以及异步电机矢量变换模型(I nducti on m otor block ,这些模块可以由SI M UL I NK调用库模型分别建立,然后封装成Subsyste m Λ这里的坐标变换(2 3和图2中的坐标转换(3 2互为反变换Λ而电流控制型P WM 变压变频器的模型在M AT LAB 5.2中的POW ERS Y S 库中可以找到Λ这三个主要模块构造好后,其它环节也一样可以通过SI M UL I NK 模块库调入,输入不同参数,然后如图3连接,整个仿真模型就建好了Λ图中异步电机矢量变换模块展开内部结构如图4Λ系统中还包括两个P I 调节器,对应于图1中A 7R ,ASR ,这两个调节器也是定制好Subsyste m 后再封装而成Λ图3异步电机矢量控制变压变频调速SI M U L I NK 仿真模型3仿真实验35第2期杨洋等:基于M A TLAB S I M UL I N K 的异步电机矢量控制调速系统仿真图4异步电机矢量变换仿真模块(1仿真实验1转速输入设定为一阶跃函数,初值为100rad s (角频率,1s 后跃变为300rad s Λ磁通设为一定值1.1,由电流型逆变器给电机供电,让电机空载启动运行,仿真获得的转速、电磁转矩仿真曲线如图5,图6Λ图5电机输出速度仿真曲线图6电磁转矩仿真曲线(2仿真实验输入设定转速(角速度不变,300rad s ,磁通输入仍为1.1,电机空载启动,1s 后加入额定负载T L ,经SI M UL I NK 仿真模型仿真后得出的速度、电磁转矩曲线如图7,图8Λ图7电机输入速度仿真曲线图8电机电磁转矩变化曲线45湖南大学学报(自然科学版2000年项目: 科技支撑计划课题(2021BAG12A05-08定稿日期:2021-06-28作者简介:倪强(1987-,男,湖南益阳人,硕士研究生,研究方向为电力牵引交流传动及其控制技术。
【精选】基于Matlab永磁同步电机矢量控制的仿真分析 doc资料
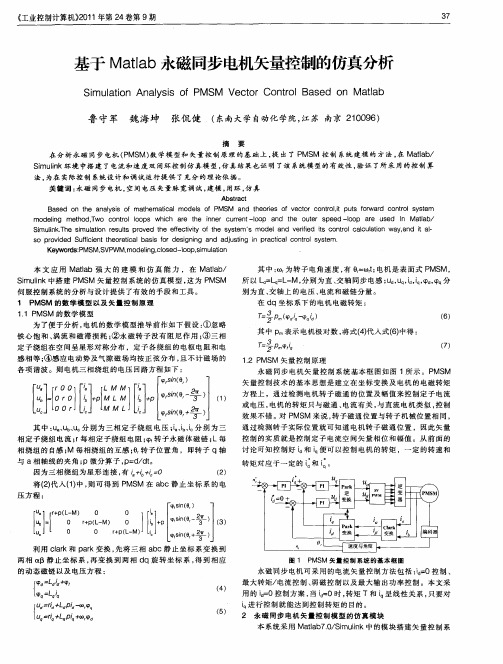
基于Matlab永磁同步电机矢量控制的仿真分析《工业控制计算机》2021年第24卷第9期本文应用Matlab 强大的建模和仿真能力,在Matlab /Simulink 中搭建PMSM 矢量控制系统的仿真模型,这为PMSM伺服控制系统的分析与设计提供了有效的手段和工具。
1PMSM 的数学模型以及矢量控制原理1.1PMSM 的数学模型为了便于分析,电机的数学模型推导前作如下假设:①忽略铁心饱和、涡流和磁滞损耗;②永磁转子没有阻尼作用;③三相定子绕组在空间呈星形对称分布,定子各绕组的电枢电阻和电感相等;④感应电动势及气隙磁场均按正弦分布,且不计磁场的各项谐波。
则电机三相绕组的电压回路方程如下:u au b u c=r 000r 000M M r i ai b i c+p L M M M L M M M M MLi ai b i c+p φf sin (θr φf sin (θr -2π3φf sin (θr +2π3(1其中:u a 、u b 、u c 分别为三相定子绕组电压;i a 、i b 、i c 分别为三相定子绕组电流;r 每相定子绕组电阻;φf 转子永磁体磁链;L 每相绕组的自感;M 每相绕组的互感;θr 转子位置角,即转子q 轴与a 相轴线的夹角;p 微分算子,p=d /dt 。
因为三相绕组为星形连接,有i a +i b +i c =0(2将(2代入(1中,则可得到PMSM 在abc 静止坐标系的电压方程:u a u b u c MM =r+p (L-M000r+p (L-M00r+p (L-M MMi a i b i cMM+pφfsin (θrφfsin (θr-2πφfsin (θr +2π3(3利用clark 和park 变换,先将三相abc 静止坐标系变换到两相αβ静止坐标系,再变换到两相dq 旋转坐标系,得到相应的动态磁链以及电压方程:φd =L d i d +φf φq =L q i qM (4u d =ri d +L d pi d -ωr φq u q =ri q +L q pi q +ωr φdM(5其中:ωr 为转子电角速度,有θr =ωr t ;电机是表面式PMSM ,所以L d =L q =L-M ,分别为直、交轴同步电感;u d ,u q ,i d ,i q ,φd ,φq 分别为直、交轴上的电压、电流和磁链分量。
基于Matlab的永磁同步电机矢量控制系统仿真研究
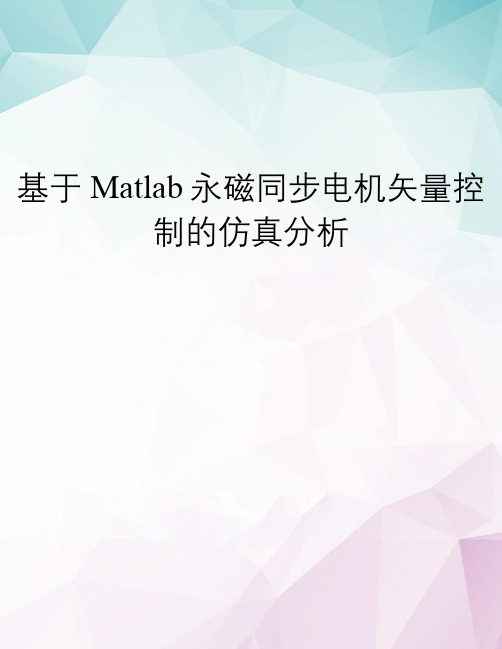
中图分类号:T M351 T M341 文献标识码:A 文章编号:100126848(2007)022*******基于Matlab 的永磁同步电机矢量控制系统仿真研究龚云飞,富历新(哈尔滨工业大学机器人研究所,哈尔滨 150001)摘 要:在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(S VP WM )技术使得交流电机能够获得和直流电机相媲美的性能。
为了更好地验证基于DSP 的交流调速矢量控制系统实际设计过程中各部分输出特性的正确性并为其设计提供必要的设计参数,利用Matlab /Si m ulink 工具箱搭建了系统的仿真模型。
仿真结果符合电机实际运行特性,为实际系统的设计提供了理论依据。
关键词:永磁同步电动机;建模;仿真;空间电压矢量脉宽调制;交流调速S i m ul a ti on of P M S M Vector Con trol Syste m ba sed on M a tl abG ONG Yun 2fei,F U L i 2xin(Robot I nstitute of Harbin I nstitute of Technol ogy,Harbin 150001,China )ABSTRACT:I n t oday πs AC servo syste m ,the vect or contr ol theory and S VP WM technique make the AC mot or can achieve the perfor mance as good as DC mot or .W hen designing the AC servo syste m ,in order t o test the correctness of every part πs out puts and p r ovide the necessary design para meters f or the re 2al syste m ,we built the si m ulati on model of the whole syste m with si m ulink t oolbox in matlab .The si m u 2lati on results accord with the real mot or πs perf or mance and p r ovide the theory basis for the designing of re 2al syste m.KEY WO R D S:P MS M;Modeling,Si m ulati on;S VP WM;AC servo syste m收稿日期:2005212227修改日期:20062032211 控制原理永磁同步电机矢量控制系统基本框图如图1所示。
三相异步电机矢量控制matlab仿真
目录1 设计任务及要求....................................................................................................... 错误!未定义书签。
2 异步电动机数学模型基本原理 ................................................................................ 错误!未定义书签。
异步电机的三相动态数学模型 ............................................................................... 错误!未定义书签。
异步电机的坐标变换 ............................................................................................... 错误!未定义书签。
三相-两相变换...................................................................................................... 错误!未定义书签。
静止两相-旋转正交变换.............................................................................................. 错误!未定义书签。
3 异步电动机按转子磁链定向的矢量控制系统 ....................................................... 错误!未定义书签。
按转子磁链定向矢量控制的基本思想 .................................................................. 错误!未定义书签。
基于Matlab的永磁同步电机矢量控制系统仿真研究

基于Matlab的永磁同步电机矢量控制系统仿真研究一、本文概述随着电机控制技术的快速发展,永磁同步电机(PMSM)因其高效率、高功率密度和优良的调速性能,在众多工业领域得到了广泛应用。
为了充分发挥永磁同步电机的性能优势,需要对其进行精确的控制。
矢量控制作为一种先进的电机控制策略,能够实现对电机转矩和磁链的独立控制,从而提高电机的动态和稳态性能。
对基于Matlab的永磁同步电机矢量控制系统进行仿真研究,对于深入理解电机控制原理、优化控制系统设计以及推动电机控制技术的发展具有重要意义。
本文旨在通过Matlab仿真平台,构建永磁同步电机的矢量控制系统模型,并对其进行仿真分析。
文章将介绍永磁同步电机的基本结构和工作原理,为后续的控制系统设计奠定基础。
接着,将详细阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,文章将构建基于Matlab的永磁同步电机矢量控制系统仿真模型,并对其进行仿真实验。
通过对仿真结果的分析,文章将评估矢量控制策略在永磁同步电机控制中的应用效果,并探讨可能的优化措施。
二、永磁同步电机的基本原理和特性永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永久磁铁作为转子励磁源的同步电机。
其工作原理主要基于电磁感应定律和电磁力定律,结合现代电力电子技术和先进的控制理论,实现了对电机的高性能控制。
永磁同步电机的核心构造包括定子绕组和永磁体转子两大部分。
定子绕组与交流电源相连,通入三相对称电流后会产生旋转磁场,类似于异步电机中的定子磁场。
不同于异步电机的是,PMSM的转子上镶嵌有高性能稀土永磁材料,这些永磁体在电机运行时不需外部电源励磁,即可产生恒定的磁场。
当定子旋转磁场与转子永磁磁场相互作用时,便会在电机内部形成一个合成磁场,从而驱动转子跟随定子磁场同步旋转。
高效节能:由于取消了传统同步电机所需的励磁绕组和励磁电源,永磁电机减少了励磁损耗,效率通常能达到90以上,尤其在宽负载范围内保持较高的效率水平。
基于Matlab异步电动机矢量控制系统的仿真

基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
基于Matlab交流异步电机矢量控制系统的仿真建模

内容摘要
希望本次演示的内容能为广大读者提供有益的参考和启示,也期待着未来研 究的新成果和新方向。
谢谢观看
未来研究方向
未来研究方向
交流异步电机矢量控制技术已经在许多领域得到了广泛应用,但仍然存在许 多有待研究和改进的地方。例如,如何进一步提高控制系统的响应速度和稳态精 度,如何解决矢量控制中的参数摄动和非线性问题,以及如何实现更为复杂的多 电机协调控制等问题,都是今后需要深入研究的方向。随着、物联网等新技术的 不断发展,也为交流异步电机矢量控制系统的研究与应用提供了新的机遇与挑战。
参考内容
交流电机矢量控制系统建模与仿 真
交流电机矢量控制系统建模与仿真
随着电力电子技术和控制理论的不断发展,交流电机矢量控制系统在工业应 用中越来越受到。本次演示将介绍基于MatlabSimulink的交流电机矢量控制系统 建模与仿真的方法和步骤。
一、交流电机矢量控制系统建模
一、交流电机矢量控制系统建模
基于Matlab交流异步电机矢量 控制系统的仿真建模
01 引言
03 仿真建模
目录
02 原理分析 04 实验验证
05 结论
07 参考内容
目录
06 未来研究断发展,交流异步电机矢量控制技术在许 多领域得到了广泛应用。这种控制技术通过将交流电机的定子电流分解为直轴和 交轴两个分量,分别进行控制,从而实现类似直流电机的控制效果。Matlab作为 一种强大的仿真和计算工具,为交流异步电机矢量控制系统的研究和设计提供了 便捷的平台。本次演示将介绍如何使用Matlab对交流异步电机矢量控制系统进行 仿真建模,并通过实验验证其有效性。
三、结论与展望
三、结论与展望
本次演示介绍了基于MatlabSimulink的交流电机矢量控制系统建模与仿真的 方法和步骤。首先,了解了交流电机的基本结构和工作原理;其次,建立了电压、 电流、转矩和位置等变量的模型,并借助MatlabSimulink搭建了系统模型;最后, 进行了系统仿真和数据分析。通过对比实测数据和仿真结果,验证了模型的准确 性,并得出了系统性能的结论。
基于Matlab_Simulink的永磁同步电机(PMSM+)矢量控制仿真(2)1
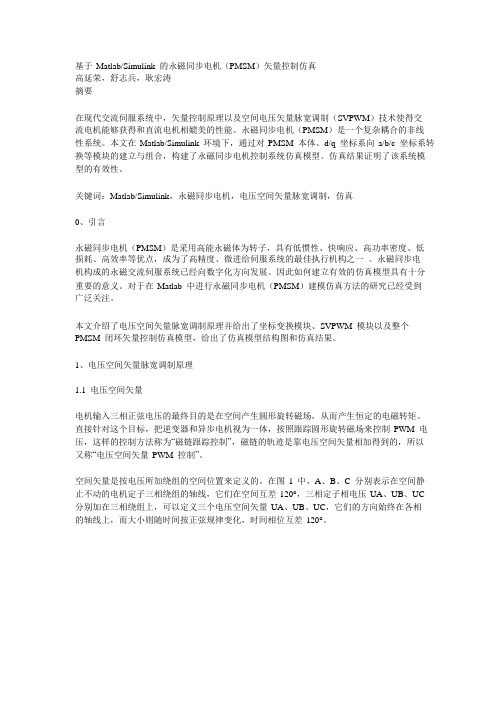
基于Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真高延荣,舒志兵,耿宏涛摘要在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。
永磁同步电机(PMSM)是一个复杂耦合的非线性系统。
本文在Matlab/Simulink环境下,通过对PMSM本体、d/q坐标系向a/b/c坐标系转换等模块的建立与组合,构建了永磁同步电机控制系统仿真模型。
仿真结果证明了该系统模型的有效性。
关键词:Matlab/Simulink,永磁同步电机,电压空间矢量脉宽调制,仿真0、引言永磁同步电机(PMSM)是采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。
永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展。
因此如何建立有效的仿真模型具有十分重要的意义。
对于在Matlab中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。
本文介绍了电压空间矢量脉宽调制原理并给出了坐标变换模块、SVPWM模块以及整个PMSM闭环矢量控制仿真模型,给出了仿真模型结构图和仿真结果。
1、电压空间矢量脉宽调制原理1.1电压空间矢量电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。
直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”。
空间矢量是按电压所加绕组的空间位置来定义的。
在图1中,A、B、C分别表示在空间静止不动的电机定子三相绕组的轴线,它们在空间互差120°,三相定子相电压UA、UB、UC 分别加在三相绕组上,可以定义三个电压空间矢量UA、UB、UC,它们的方向始终在各相的轴线上,而大小则随时间按正弦规律变化,时间相位互差120°。
基于Matlab永磁同步电机矢量控制的仿真分析
Smuik环 境 中搭 建 了 电 流和 速 度 双 闭 环控 制仿 真模 型 , 真 结 果 也证 明 了该 系统模 型 的有 效 性 , 证 了所 采 用 的 控 制 算 i l n 仿 验
法 , 在 实际 控 制 系统 设计 和 调 试 运 行 提 供 了充 分 的 理 论依 据 。 为
Si ik. e si ua i r ut ov d he fe t t te y tm mod a d erid t onr l a{ lt mul Th m lt n on es l pr e t e c i y of h s se S s vi el n v ie i c to c cua i wayan i l f s on , d t — a
S rv e u ie t h oei l a i frd s n g a d a js n n p a t a c nrl y tm. O po i d S f i e r c s o e i i n du t g i rci l o t se d c nt ta b s g n i c o s
K y r sP M, V W M, d l g co e - o p s lt n e wo d : MS S P mo ei , ls d lo ,i a i n mu o
本 文 应 用 Mal 强 大 的 建 模 和 仿 真 能 力 , 在 Malb tb a t / a Smuik中 搭 建 P M 矢 量 控 制 系统 的仿 真模 型 , 为 P M i l n MS 这 MS 伺 服控 制 系统 的分 析 与 设 计 提 供 了 有 效 的 手段 和工 具 。
mo eig d l me h d T c n r l o p whc a e h in r u r n —o p n t e ue s e d-o p r u e I n t o ,wo o t lo s o ih r t e n e c r t l a d h o tr p e lo a e s d n e o Ma lb t / a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章按转子磁链定向的矢量控制方程及解耦控制
上节的定性分析是矢量控制的基本思路,其中的矢量变换包括三相一两相变换和同步旋转变换。实际上异步电动机具有定子和转子,定、转子电流都得变换,情况更复杂一些,要研究清楚还必须从分析动态数学模型开始。
如前所述,取d轴为沿转子总磁链矢量 的方向,称作M(Magnetization)轴,再逆时针转 就是q轴,它垂直于矢量 ,又称T(Torque)轴。这样的两相同步旋转坐标系称作M、T坐标系,即按转子磁链定向(FieldOrientation)的旋转坐标系。
图5 电流控制变频器
3.2带转矩内环的直接矢量控制系统
另外一种提高转速和磁链闭环控制系统解耦性能的办法是在转速环内增设转矩控制内环,图6绘出了一种实际的带转矩内环的直接矢量控制系统,其中主电路选择了电流滞环跟踪控制的CHBPWM变频器,这只是一种示例,也可以用带电流内环的电压源型变频器。系统中还画出了转速正、反向和弱磁升速环节,磁链给定信号由函数发生程序获得。转速调节器ASR的输出作为转矩给定信号,弱磁时它也受到磁链给定信号的控制.
转速、磁链闭环控制的矢量控制系统原理分析及MATLAB仿真
摘要
因为异步电动机的物理模型是一个高阶、非线性、强耦合的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。如果把异步电动机模型解耦成有磁链和转矩分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。本文研究了矢量控制系统中磁链调节器的设计方法。并用MATLAB最终得到了仿真结果。
关键词:矢量控制,非线性,MATLAB仿真
Speed and flux vector control system for closed-loop control theory analysis and MATLAB simulation
图7电流滞环脉冲发生器模型及封装后子系统
(2)转子磁链模型。在建立转子磁链模型时,需要用坐标变换,但在Matlab模块库中,没有两相静止坐标与两相旋转坐标的变换模块,只
有三相坐标到两相坐标变换模块,通过角度是否变化确定了变换方式在三相静止坐标到两相旋转坐标变换的数学模型为:
C3s/2r=
但Matlab模块中三相坐标到两相坐标变换模块abc2dq0 Transformation的数学模型为:
当两相同步旋转坐标系按转子磁链定向时,应有
2-1
代入转矩方程式和 状态方程式,并用m、t代替d、q,即得
2-2
2-3
2-4
2-5
2-6
2-7
由于 ,状态方程中的 蜕化为代数方程,将它整理后可得转差公式
2-8
这使状态方程又降低了一阶。
由式 可得
2-9
则 2-10
或 2-11
式2-10或2-11表明,转子磁链 仅由定子电流励磁分量 产生,与转矩分量 无关,从这个意义上看,定子电流的励磁分量与转矩分量是解耦的。
The direct vector control is one superior alternating current machine control mode, it simulates direct current machine's control mode to enable the alternating current machine also to obtain the control effect which compares favorably with the direct current machine. This article has studied in the vector control system the flux linkage regulator's design method. And obtained the simulation result finally with MATLAB.
C3s/2r= ×
从式中可以看出两者是有差别的,因此不能直接应用Matlab中坐标变换模块。但如果把模块abc2dq0 Transformation的旋转角度加上90°,同时矩阵幅值乘以 时,两者就完全相等。同样,两相坐标变换到三相坐标,在应用dq0-abc Transformation模块时角度和幅值上也应当进行适当调整。在转子磁链模型中还需要求ωs,由于ωs=istLm/ Trψr,故采用Fcn模块,函数定义为Lm*u(1)/ (u(2)Tr+1e-3) ,其中, u(1)表示ist;u(2)表示ψr。封装后子系统转子及磁链模型如:
图3 异步电动机矢量变换与电流解耦数学模型
按照矢量控制系统原理结构图模仿直流调速系统进行控制时,可设置磁链调节器 和转速调节器ASR分别控制 和 ,如图4a所示。把ASR的输出信号除以 ,当控制器的坐标反变换与电机中的坐标变换对消,且变频器的滞后作用可以忽略时,此处的(÷ )便可与电机模型中的(× )对消,两个子系统就完全解耦了。这时,带除法环节的矢量控制系统可以看成是两个独立的线性子系统如图4b。
a)பைடு நூலகம்
b)
图4 带除法环节的解耦矢量控制系统
a)矢量控制系统 b)两个等效的线性子系统
——磁链调节器 ASR——转速调节器
第3章转速、磁链闭环控制的矢量控制系统
对解耦后的转速和磁链两个独立的线性子系统分别进行闭环控制的系统称作直接矢量控制系统。采用不同的解耦方法可以获得不同的直接矢量控制系统。
3.1带磁链除法环节的直接矢量控制系统
如果能将交流电机的物理模型等效变换成类似直流电机的模式,仿照直流电机进行控制,那么控制起来就方便多了,这就是矢量控制的基本思想。
第1章矢量控制的基本原理
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以腔制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式为矢量控制方式。
KEY WORDS:Vector Control,Misalignment,MATLABsimulation
目 录
前 言
矢量控制是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。本文研究了矢量控制系统中磁链调节器的设计方法。首先简单介绍了矢量控制的基本原理, 给出了矢量控制系统框图,然后着重介绍了矢量控制系统中磁链调节器的设计和仿真过程。仿真结果表明调节器具有良好的磁链控制效果。
图2 矢量控制系统原理结构图
在设计VC系统时,如果忽略变频器可能产生的滞后,并认为在控制器后面的反旋转变换器 与电机内部的旋转变换环节VR相抵消,2/3变换器与电机内部的3/2变换环节相抵消,则图2中虚线框内的部分可以删去,剩下的就是直流调速系统了。可以想象,这样的矢量控制交流变压变频调速系统在静、动态性能上完全能够与直流调速系统相媲美。
1.1坐标变换的基本思路
坐标变换的目的是将交流电动机的物理模型变换成类似直流电动机的模式,这样变换后,分析和控制交流电动机就可以大大简化。以产生同样的旋转磁动势为准则,在三相坐标系上的定子交流电流 、 、 ,通过三相——两相变换可以等效成两相静止坐标系上的交流电流 和 ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流 和 。如果观察者站到铁心上与坐标系一起旋转,他所看到的就好像是一台直流电动机。
图6 带转矩内环的直接矢量控制系统
第4章控制系统的建模和参数设置与仿真
4.1控制电路建模和参数设置
滞环脉冲发生器建模。滞环脉冲发生器作用是给定电流iA、iB、iC同输出电流ia*、ib*、ic*相比较,电流偏差超过一定范围时,滞环脉冲发生器控制逆变器上(下)桥臂功率器件动作,使得输出电流尽可能接近给定电流。为了保证同一桥臂上下轮流动作,上臂桥采用Relay模块,滞环宽度取12。为了加快仿真,下臂桥采用由Data TypeConversion、Logical Operator等模块组成。滞环脉冲发生器及封装后的子系统如图7所示。
在前述的图4a中,转速调节器输出带“÷ ”环节,使系统可以在有关假定条件下(见上节指出的三个假定条件)简化成完全解耦的 与 两个子系统(模型在图中略去未画),这是一种典型的直接矢量控制系统。两个子系统都是单变量系统,其调节器的设计方法和直流调速系统相似。电流控制变频器可以采用电流滞环跟踪控制的CHBPWM变频器(图5a),也可采用带电流内环控制的电压源型PWM变频器(图5b)
式2-10还表明, 与 之问的传递函数是一阶惯性环节,其时间常数Tr为转子磁链励磁时间常数,当励磁电流分量 突变时, 的变化要受到励磁惯性的阻挠,这和直流电动机励磁绕组的惯性作用是一致的。
式2-10或式2-11、式2-8和式(2-2)构成矢量控制基本方程式,按照这组基本方程式可将异步电动机的数学模型绘成图3的结构形式,由图可见,两个子系统之间仍旧是耦合着的,由于Te同时受到 和 的影响。
ABSTRACT
Because asynchronous motor's physical model is a higher order, the misalignment, the close coupling many-variable system, needs to use a group of nonlinear simultaneous equation to describe, therefore controls extremely inconveniently. The reason that asynchronous machine's physical model is complex, the key lies during each magnetic flux the coupling. If becomes the asynchronous motor model decoupling has the simple model which the flux linkage and the rotational speed control separately, may simulate direct current motor's control model to control the motor.