冗余系统
双机冗余系统通常包括几个层次,即硬件冗余、操作系统冗余、应用系统

双机冗余系统通常包括几个层次,即:硬件冗余、操作系统冗余、应用系统冗余。
我们的解决方案指的是应用系统冗余,具体说就是控制系统软件的冗余。
而控制系统软件的冗余又包含两个方面的内容,即驱动程序的冗余和S CAD A软件的冗余。
驱动程序的冗余主要是指驱动程序的热备方式。
热备方式通常包括驱动程序的两种扫描方式,即两个驱动程序同时扫描同时接收或者只有一个驱动程序进行扫描。
通常情况下,两个驱动程序同时扫描同时接收是不被采用的,主要是因为驱动程序和控制设备之间信道的限制,还有就是很难保证上行、下行数据的同步。
所以我们建议采用第二种扫描方式,这样就必须在两个驱动程序之间建立主备关系。
任意时刻个只有一个驱动程序进行扫描,也就是主驱动程序,而备驱动程序只进行接收,这样即可以保证上行扫描数据的一致性,也可以保证下行控制数据的唯一性。
S CAD A软件的冗余主要包括:实时数据同步、历史数据同步、报警同步、控制输出的唯一性等几个方面。
也就是说主S CAD A是监视和控制的唯一的数据源,网络上所有的MMI (人机界面工作站)都必须通过主S CAD A进行监视和控制;备S CAD A必须保证同主S CAD A的数据同步。
这里实时数据的同步主要依靠驱动程序数据的同步来实现;历史数据的同步,可以通过建立独立的历史数据服务器来实现,也可以通过在S CAD A节点上建立历史数据恢复的功能来实现。
现有的组态软件大多不具备这些功能,因此S CAD A冗余的实现除了依赖组态软件本身提供的功能外,还有额外的工作要做。
驱动程序有主备,S CAD A软件有主备,都存在切换的问题;但是驱动程序的切换和S CAD A软件的切换必须同步,否则数据的唯一性和可靠性没有任何保障。
所以驱动程序和S CAD A软件之间必须建立联系用来协调各自的状态,保证不出现混乱。
只有这样才能实现比较完善的双机冗余。
系统实例项目名称:自来水厂S CAD A冗余系统系统组成: Gateway:Motorola MDLC GatewayRTU:Motorola MOS CAD RTU通讯方式:无线操作系统:MS WINDOWS2000 SERVER/PROFESIONALS CAD A 软件:iFIXMMI工作站软件:IFIXS CAD A 冗余软件:DUALS CAD A冗余驱动程序:OPC SERVER FOR MGT功能简介:主OPC SERVER FOR MGT负责通过Motorola MDLC Gateway 扫描无线连接的RTU,备OPC SERVER FOR MGT并不对RTU发送扫描命令,只是主驱动程序同步接收RTU上传的数据。
服务器硬件故障冗余系统

存储冗余
采用RAID等存储技术,实现数据在 多个硬盘上的镜像或条带化存储,提 高数据可靠性和读写性能。
网卡冗余
配置多个网卡,实现网络故障时的自 动切换,保证服务器网络通信的连续 性。
软件冗余技术
进程级冗余
数据级冗余
通过复制关键进程并在不同处理器上运行 ,实现进程故障时的自动切换。
在内存中复制关键数据,确保数据在单个 内存芯片故障时不会丢失。
负载均衡技术
通过负载均衡设备将网络流量分散到多个服务器上,提高网络性能和可靠性。
网络协议冗余
采用具有容错能力的网络协议,如OSPF、BGP等,实现网络故障时的自动恢复。
系统集成与测试
系统集成
将硬件、软件和网络等组件集成在一起,构 建完整的服务器硬件故障冗余系统。
功能测试
测试冗余系统的各项功能是否正常工作,包 括故障检测、切换和恢复等。
本文研究内容与结构
研究内容
本文主要研究服务器硬件故障冗余系统的设计与实现,包括系统架构、关键技 术、实验验证等方面。
结构安排
本文首先介绍项目背景和冗余系统的概述,然后详细阐述冗余系统的设计与实 现过程,最后通过实验验证系统的有效性和可靠性,并得出结论和展望未来的 研究方向。
02
服务器硬件故障类型 及影响
指令级冗余
软件容错算法
通过增加额外的指令或操作,以检测并纠 正因硬件故障导致的指令错误。
采用特定的算法,如N版本程序设计、恢复 块等,实现软件故障时的自动恢复。
网络冗余技术
网络设备冗余
配置多个交换机、路由器等网络设备,实现网络设备的故障切换。
网络链路冗余
采用多条网络链路,实现链路故障时的自动切换,保证网络通信的连续性。
冗余控制系统

冗余控制系统关键技术
信息同步技术 故障检测技术 故障仲裁及切换技术 热拔插技术 故障隔离技术
信息同步技术
它是工作、备用部件之间实现无扰动(Bumpless)切换技术的前 提,只有按控制实时性要求进行高速有效的信息同步,保证工作、备 用部件步调一致地工作,才能实现冗余部件之间的无扰动切换。
在热备用工作方式下,其中一块处于工作状态(工作卡),实现 系统的数据采集、运算、控制输出、网络通讯等功能;而另一块处于 备用状态(备用卡),它实时跟踪工作卡的内部控制状态(即状态同 步)。工作/备用卡件之间的正/负逻辑是互斥的,即一个为工作卡, 另一个必定是备用卡;而且它们之间有冗余控制电路(又称工作/备 用控制电路)和信息通讯电路,以协调两块卡件同时而且有序地运行 ,保证对外输入输出特性的同一性,即对于用户使用而言,可以认为 只有一个部件。一般在设计中,工作、备用部件之间通过高速的冗余 通讯通道(串行或并行)实现运行状态互检和控制状态的同步(如组 态信息、输出阀位、控制参数等)。
设计,使系统网络通信带宽提高。当其中一路故障(网卡损坏或出现
线路故障)时,另一路自动地承担全部通信负载,保证通信的正常进
行。
冷却系统冗余
4)冷却系统冗余。
利用控制柜内可自动切换的冗余风扇,对风扇和机柜内温度进行
故障仲裁及切换技术
3) 故障仲裁技术和切换技术
精确及时地发现故障后,还需要及时确定故障的部位、分析故障
的严重性,依赖前文提到的冗余控制电路,对工作、备用故障状态进
行分析、比较和仲裁,以判定是否需要进行工作/备用之间的状态切 换。控制权切换到冗余备用部件还必须保证快速、安全、无扰动。当
处于工作状态的部件出现故障(断电、复位、软件故障、硬件故障等
3.1 10第十章 冗余系统
本章内容双机热备双网络冗余双设备冗余双IOServer冗余概述KingSCADA 提供全面的冗余功能,能够有效地减少数据丢失的可能,增加了系统的可靠性,方便系统维护。
KingSCADA提供四重意义上的冗余功能,即双机热备、双网络冗余、双设备冗余、双IOServer。
第一节双机热备1、原理双机热备主要是实时数据、报警信息和变量历史记录的热备。
主从机都正常工作时,主机从实时数据服务器获取数据,并产生报警和事件信息。
从机通过网络从主机获取实时数据和报警信息,而不会从实时数据服务器读取或自己产生报警信息。
主从机都各自记录变量历史数据。
同时,从机通过网络监听主机,从机与主机之间的监听采取请求与应答的方式,从机以一定的时间间隔(冗余机心跳检测时间)向主机发出请求,主机应答表示工作正常,主机如果没有应答,从机将切断与主机的网络数据传输,转入活动状态,改由实时数据服务器获取数据,并产生报警和事件信息。
此后,从机还会定时监听主机状态,一旦主机恢复,就将数据备份给主机。
只有从机坏掉之后,主机才会从实时数据服务器获取数据。
通过这种方式实现了热备。
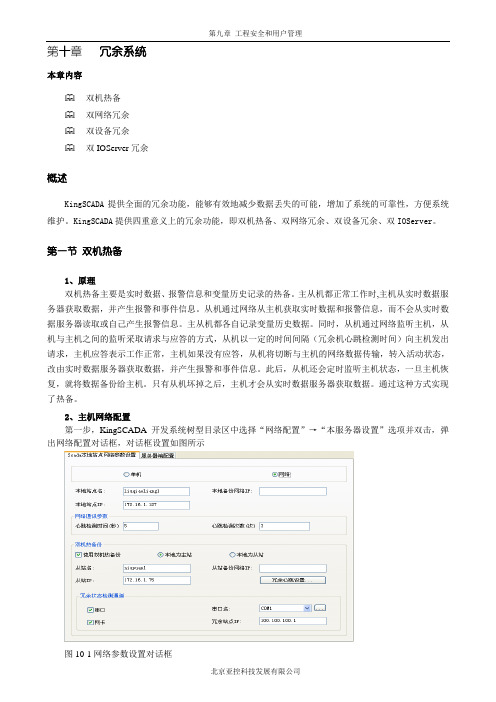
2、主机网络配置第一步,KingSCADA开发系统树型目录区中选择“网络配置”→“本服务器设置”选项并双击,弹出网络配置对话框,对话框设置如图所示图10-1网络参数设置对话框第二步,单击“服务器端配置”选项卡,弹出配置对话框,如图所示图10-2服务器端配置对话框根据工程需要,选择相应的节点类型。
如果本机是实时数据服务器的主机,同时又是报警事件服务器和历史记录服务器的主机的话,那么就选中“本地为实时数据服务器”、“本地为报警事件服务器”、“本地为历史数据服务器”选项。
3、从机网络配置第一步,在使用双机热备功能时要求主机和从机上的工程完全一致,所以要将主机的工程拷贝到从机上,然后对从机的进行网络配置。
主从机的变量名和ID号必须完全一致,建议用户不要单独修改主机或从机的变量部分,防止出现不一致的现象。
PLC的冗余系统与热备用系统
在石油、化工、冶金等行业的某些系统中,要求控制装配有极高的靠得住性。
若是控制系统发生故障,将会造成停产、原料年夜量浪费或装备损坏,给企业造成极年夜的经济损失。
可是仅靠提高控制系统硬件的靠得住性来知足上述要求是远远不够的,由于PLC自己靠得住性的提高是有一定的限度。
使用冗余系统或热备用系统就能够比力有用地解决上述问题。
1.冗余控制系统
在冗余控制系统中,整个PLC控制系统(或系统中最重要的部门,如CPU
模块)由两套完全不异的系统组成。
两块CPU模块使用不异的用户法式并行工作,其中一块是主CPU,另外一块是备用CPU;主CPU工作,而备用CPU的输出是被制止的,当主CPU发生故障时,备用CPU自动投进运行。
这一切换进程是由冗余处置单元RPU控制的,切换时间在1~3个扫描周期,I/O系统的切换也是由RPU完成的。
2.热备用系统
在热备用系统中,两台CPU用通讯接口毗连在一起,均处于通电状态。
当系统泛起故障时,由主CPU通知备用CPU,使备用CPU投进运行。
这一切换进程一般不太快,但它的结构有比冗余系统简单
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解相关PLC产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城。
/。
(完整版)冗余系统实验手册
冗余实验手册目录1 .实验说明 (3)搭建构造 (3)实验原理 (3)2. 实验准备 (4)硬件准备 (4)软件准备 (4)3. 实验过程 (4)硬件接线 (4)软件组态 (5)网络规划 (15)系统运转 (22)4. 实验总结 (23)实验报告——冗余系统的搭建1.实验说明1.1 搭建构造本实验仅以 ControlLogixL61 控制器为例,简单介绍冗余系统搭建的基本构造要求(其余控制器与其搭建原则一致)。
搭建一套冗余系统需要两套完整一致的硬件装置,比如:主框架是7 槽,则从框架也一定是7 槽,即主从框架一致,框架上插入的模块也一定相同,并且主从框架上所插模块的地点也一定一致。
软件上来讲,框架上所插入的模块固定版本号一定一致,并且框架上各模块之间的版本号也一定互相般配。
主框架与从框架上的 1756-CN2R 模块的物理节点一定一致,即两个模块的拨码开关一定一致,并且主从框架上的 1756-EN2T 模块 IP 地点一定一致。
总之,主从框架好像互相复制相同。
但需要注意的是,主从框架上不可以有 I/O 模块。
在远程框架中,除了需要控制的 I/O 模块以外,还一定有与主从框架之间进行通信的通信模块,并且要有起码两个相同网络的通信模块,因为在主从控制器在切换瞬时的时差中,不可以与远程框架进行通信远程框架,而远程框架内两个通信模块之间能够构成通信,以保证网络不中止。
1.2 实验原理系统运转时,只有一个 LogixL61 控制器能够拥有对整个系统输出模块的控制权,称之为主控制器,而两个控制器能够同时接收输入模块的数据,因此冗余的主要工作就是备份控制器,及时监督主控制器的工作状态,如主控制器出现非异样状态,则备份控制器便代替主控制器,对系统输出模块进行控制,并撤消主控制器的控制权。
这样接可以保证系统一直都能够正常工作。
2.实验准备以本次试验为例,对实验的整个过程进行说明。
2.1 硬件准备本次试验采纳 ControlLogix 系列进行试验,构成冗余系统的两个框架上分别在相同的槽号上,搁置相同的模块,每个框架上包含一个1756-L61 型办理器,通信模块采纳一个 1756-EN2T 模块,一个 1756-CN2R 模块以及一个冗余模块(两个框架之间的冗余模块用光纤连结,进行数据的通信和数据备份)。
PLC 冗余系统培训

启动模式
注意:由于系统切换而启动新控制系统时,无 论设置为那种启动模式,都将以“热启动”模 式启动
冗余系统的功能
系统的核对统一性检查 系统的切换功能 运行模式的变更 热备传送功能 在线程序写入的冗余跟踪功能 从控制系统向待机系统的存储复制功能 在线更换模块
高可靠性
系统的核对统一性检查
在冗余系统中,为使冗余系统在发生了系统切换时能继续进行控制,需 要将控制系统与待机系统构成、参数、程序。不断的系统核查的特点确 保了待机系统可以有效的接管控制。 两系统同一性检查在下列时间进行:1.两系统的电源同时启动。 2.两系 统的CPU同时解除复位。3.控制系统CPU模块进行END处理时 4.热备电 缆重新连接时。 程序 程序 系统核对的内容: 程序 程序 程序内容(参数、程序、软元件初始值) 参数 参数 运行状态的监视 模块安装状态的监视 控制系统 待机系统 存储卡的的状态 参数有效驱动器
CPU硬件特性
Mitsubishi QnPRHCPU
CPU模块l 处理时间 (位触 点) 程序存储器 (步, 字节) 可外接存储卡 数据跟踪通道 跟踪数据大小 切换时间 Q12PRHCPU Q25PRHCPU 34ns Q12PRH: 124k (496kB) Q25PRH: 252k (1MB) 32MB max 专用电缆 1x (3m) 200K bytes (100K 字) 22ms (48K字) 46ms (100K字) Ethernet MELSECNET/H 8K
冗余系统的工作原理
冗余系统的工作原理
冗余系统是一种通过备份和冗余原则来提高系统可靠性和容错能力的技术。
它的工作原理是通过使用多个相互独立的组件或系统来实现对故障的恢复和保护。
首先,冗余系统采用备份机制来确保系统数据的安全性。
它会将关键数据存储在多个独立的设备或服务器上,以防止单一设备或服务器的故障导致数据丢失。
当出现故障时,备份的数据可以用来进行恢复和补救操作。
其次,冗余系统采用冗余设计来确保系统的连续性和可用性。
它通过部署多个相同或相似的组件或系统,并行运行它们,以确保即使某个组件或系统出现故障,其他组件或系统仍然能够继续正常工作。
这种冗余设计可以有效降低系统因部分故障而导致的服务中断或质量下降的风险。
另外,冗余系统通常还会采用监测和自动切换机制来实现快速的故障检测和切换。
系统会不断监测各个组件或系统的健康状态,一旦检测到故障或异常,就会自动触发切换到备用组件或系统,以保持系统的连续性和可用性。
这种自动切换机制可以大大提高系统的恢复速度和用户体验。
需要注意的是,冗余系统虽然可以提高系统的可靠性和容错能力,但也需要相应的成本和资源投入。
维护多个备份设备或服务器、部署多个冗余组件或系统以及进行监测和切换机制的开发和维护,都需要耗费一定的费用和精力。
综上所述,冗余系统的工作原理是通过备份机制、冗余设计和自动切换机制来提高系统的可靠性和容错能力。
它是一种有效的技术手段,用于保护关键系统免受故障和意外情况的影响。
冗余系统的名词解释
冗余系统的名词解释在当今科技高速发展的时代,我们日常生活中无时无刻不在接触到各种各样的电子设备和系统。
其中,冗余系统作为一种重要的技术手段,被广泛应用于各个领域,尤其是需要高可靠性和稳定性的关键系统中。
本文将对冗余系统进行名词解释,并进一步探讨其原理以及应用。
一、冗余系统的概念和特点冗余系统是指在关键系统中,为了提高系统的可靠性和容错能力而采取的多重备份策略。
其基本原理是通过增加冗余的组件或资源,使得系统能够在个别元件或资源出现故障时,仍能保持正常运行。
在冗余系统中,冗余组件与正常组件工作同步,当出现故障时,冗余组件能够迅速接管故障组件的功能,从而保证系统的连续性。
冗余系统具有以下特点:1. 高可靠性:通过冗余设计,系统能够提供更高的可靠性,降低故障发生的概率。
当主要组件故障时,系统能够自动切换到备份组件,保证系统的正常运行。
2. 容错能力强:冗余系统能够通过备份组件的切换,对故障进行快速响应和处理,减少对整个系统的影响,提高系统的容错能力。
3. 可恢复性高:一旦系统发生故障,冗余系统能够迅速恢复到正常工作状态。
这是通过备份组件的自动接管和故障组件的修复等方式实现的。
4. 设计复杂:冗余系统的设计和实施相对复杂,需要考虑多个组件之间的相互协作、监控和切换机制。
同时,还需要对各个组件的状态进行实时监测和管理。
5. 成本高:冗余系统的实施和维护需要增加额外的硬件、软件和人力资源,从而增加了系统的建设和运营成本。
二、冗余系统的分类根据冗余系统的不同应用和实施方式,可以将其分为以下几类:1. 硬件冗余:硬件冗余是指在关键系统中采用备份硬件组件的方式来实现冗余。
常见的硬件冗余技术包括冗余电源、冗余存储和冗余网络等。
通过增加冗余硬件,系统能够在单个硬件组件故障时保持正常运行。
2. 软件冗余:软件冗余是指通过备份软件或系统程序来实现冗余。
常见的软件冗余技术有备份软件、多进程和多线程等。
通过多个软件实例的工作协同,系统能够在单个软件组件故障时继续提供服务。
第5章-罗克韦尔PLC冗余控制系统-

3.冗余ቤተ መጻሕፍቲ ባይዱ制系统的无扰切换
1 冗余控制系统的切换时间 罗克韦尔PLC冗余控制系统的切换时间取决于ControlNet网络的刷新时间( NUT)。 2 冗余控制系统切换的数据完整性
4.冗余控制系统中ControlNet节点地址设置
在冗余机架中,CNB模块与对等方CNB模块共用一对ControlNet节点号, 如图5-9所示。
1.冗余控制系统的组成
1 冗余框架 2 控制器
3 CBN模块 4 ENBT模块 5 CNB和ENBT模块 6 SRM模块 • 2.冗余控制系统的网络刷新时间
(2)电源冗余 在使用冗余电源的PLC冗余控制系统中,需要使用两个冗余电源,1756PA75R和1756-PB75R可以任意组合。报警器接线可以连接电源模块和输入模块 ,如图5-7所示。
(3)系统框架冗余 在使用冗余系统框架的PLC控制系统中,冗余框架的尺寸大小必须相同,框架 的槽设置必须相同,如图5-8所示。
1. PLC冗余控制系统概述 2. 罗克韦尔PLC冗余控制系统架构 3. 罗克韦尔PLC冗余控制系统设计
如图5-1所示为冗余系统示意图。
1.冗余控制系统和热备用系统
所谓“冗余”系统,是指整个PLC控制系统由两套完全相同的系统组成,其 中一套在系统正常工作时并不需要,如图5-2所示。
在热备用(Hot)系统中,两台CPU用通信接口连接在一起,均处于通电状 态,如图5-3所示。
软件冗余系统中PLC内部的运行过程如图5-4所示。
冗余系统
冗余系统
常见问题解答
北京亚控科技发展有限公司
2009年9月
目录
1. 组态王双击热备,当主机或从机当掉重启后,为什么历史数据备份不过来? (1)
2. 一台装有组态王的PC机,有两块网卡,下位机是一套欧姆龙PLC,一个机架,一个CPU,两块以太网模块,PC机的两块网卡和PLC的两个以太网模块组成了不同网段的双以太网网络,这种方式可以实现双网络冗余吗? (2)
1. 组态王双击热备,当主机或从机当掉重启后,为什么历史数据备份不过来?
需要在“网络配置”里,主机的“本机节点名”、“从站点”、“主站历史库路径”和从机的“本机节点名”、“主站点”、“从站历史库路径”都使用相同类型的名称,要么都用机器名,要么都用IP地址来表示。
图A这种格式是错的,图B的格式是对的。
图A
图B
2. 一台装有组态王的PC机,有两块网卡,下位机是一套欧姆龙PLC,一个机架,一个CPU,两块以太网模块,PC机的两块网卡和PLC的两个以太网模块组成了不同网段的双以太网网络,这种方式可以实现双网络冗余吗?
可以。
在组态王里定义设备时可以定义成双设备冗余的方式,组态王认为一个以太网模块就是一个设备,间接实现双网络冗余,但这种方式如果cpu当机就无法实现冗余功能。
冗余系统学习资料

.1 例子所需硬件和软件硬件:一套S7-400H PLC,包括(1) 1个安装机架UR2-H (2) 2个电源模板PS 407 10A (3) 2个容错CPU,CPU414-4H或CPU 417-4H (4) 4个同步子模板(5) 2根光缆一个ET200M分布式I/O 设备,包括(6) 2个IM 153-2 (7) 1个数字量输入模板(8) 1个数字量输出模板必备的附件,如PROFIBUS 屏蔽电缆及网络连接器等。
软件:STEP 7 V5.3 SP2标准版(已集成冗余选件包)或更高版本。
2.2硬件安装(1)设置机架号CPU V3版本,通过同步子模板上的开关设置;CPU V4版本,通过CPU背板上的开关设置;CPU通电后此机架号生效。
(2)将同步子模板插到CPU板中。
(3)连接同步光缆将两个位于上部的同步子模板相连;将两个位于下部的同步子模板相连;在打开电源或启动系统之前要确保CPU的同步光缆已经连接。
同步光纤的连接如图2-1所示(4)组态分布式I/O站ET200M ,使其作为具有切换功能的DP从站。
(5)将编程器连到第一个容错CPU(CPU0)上,此CPU 为S7-400H 的主CPU。
(6)通电后CPU自检查CPU第一次通电时,将执行一次RAM 检测工作,约需3分钟。
这段时间内CPU 不接收通过MPI接口来的数据,并且STOP LED 灯闪烁。
如果有备用电池,再次通电时不再做此项检查工作。
(7)启动CPU 装入程序后执行一个热启动操作:首先启动主CPU ,然后启动热备CPU2.3使用STEP 7 进行组态2.3.1创建项目组态S7-400H 在STEP7中新建一个项目,在Insert 菜单下的Station选项中选择SIMATIC H Station,添加一个新的S7-400H的站,如图2-2所示2.3.3 系统参数设置容错站中的模板参数赋值与S7-400 标准站中的模板参数赋值没有什么区别。
冗余控制系统的原理及性能优化

冗余控制系统的原理及性能优化。
摘要本文以ControlLogix为例,介绍了可编程控制器冗余系统的冗余原理,对影响冗余性能的关键问题进行了分析,通过减少扫描周期和切换时间来对其冗余性能进行优化,为类似冗余系统的性能优化提供的参考方法。
关键词ControlLogix 冗余控制器切换The Theory and Optimization of Redundancy Control SystemFeng Li Wang Liangyong Qian Xiaolong(Institute of Information Sci. & Eng.,Northeasten Univ.,Shenyang 11004,China )Abstract This article introduces the theory and optimization of redundancy control system based on ControlLogix, and the key problems of the performance are discussed. At the same time, it presented a way to improve the performance of redundancy system via minimizing scan cycle andtchover time, which is useful forusers to realize on the similar system.Keywords ControlLogix Redundancy Controller tchover1 引言随着制造业竞争的加剧,制造商更加追求生产设备的可靠性,尤其是那些控制关键性生产工序的设备,往往需要采用冗余配置。
目前,多数的基于可编程控制器的冗余系统采用了两套CPU处理器模块,一个处理器模块作为主处理器,另外一个作为从处理器。
刹车冗余原理
刹车冗余原理
刹车冗余系统是一种关键的车辆安全技术,通过多个独立的刹车系统来确保车辆在发
生故障时仍能够安全减速和停车。
这种系统的原理非常简单,也非常有效,下面就来详细
介绍一下刹车冗余系统的原理和实现方式。
当车辆发生刹车失效时,刹车冗余系统可以自动或者手动切换到备用刹车系统上,从
而确保车辆能够安全地减速和停车。
例如,当车辆的主刹车发生故障时,驾驶员可以手动
使用备用刹车系统来刹车。
这种刹车冗余系统不仅可以提高车辆的安全性和稳定性,还可
以减少刹车故障对车辆造成的损失。
刹车冗余系统的实现方式
刹车冗余系统可以采用多种实现方式,其中最常见的方式是采用独立的刹车系统,例
如前刹车和后刹车。
这种方式可以在发生一侧刹车失效时,仍然能够使用另一侧刹车来减
速并保持方向的稳定性。
另一种实现方式是采用电子刹车,这种系统可以使用电子控制板来管理多个刹车系统,从而实现刹车冗余功能。
例如,如果主刹车系统发生故障,则电子刹车系统可以自动切换
到辅助刹车系统。
此外,刹车冗余系统还可以采用手动的方式来实现。
例如,在发生主刹车系统的故障时,驾驶员可以手动使用备用的手刹来刹车。
这种方式虽然效率较低,但是在紧急情况下
可以确保车辆的安全性。
三模冗余系统
三模冗余系统
三模冗余系统简称TMR(Triple Modular Redundancy),是最常用的一种容错设计技术.三个模块同时执行相同的操作,以多数相同的输出作为表决系统的正确输出,通常称为三取二.三个模块中只要不同时出现两个相同的错误,就能掩蔽掉故障模块的错误,保证系统正确的输出.由于三个模块是互相独立的,两个模块同时出现错误是极小概率事件,故可以大大提高系统的可信性.同时,为保障每个模块的可靠性,0 E, n. t3 s" G# l2 X
保证及时处理一次故障的影响,系统还具有故障检测能力,周期性或在需要时检测故障,发现故障后能及时定位,进行故障处理,减少二次故障发生概率.另外,对于关键性输出,有故障一安全保障系统的故障安全性.所以,本系统是一个高可靠性和高安全性的冗余结构.
; k, u: x% e6 n 系统一般设置三个表决面,分别为输入表决面、计算输出表决面和表决器表决面.由于三个模块之间有相互交叉传送数据,因此每个模块的数据都可以共享.输入表决面是在计算前对三个信号采集模块的输入数据进行三取二表决,屏蔽掉单个模块的输入故障,可以包容传感器故障而不影响计算,保证输入到三个模块参与计算的数据都是正确的.计算输出表决面是在计算后输出前对三个计
算模块的计算结果进行三" s$ I8 R6 l4 J- N
取二表决,可以通过两个模块的正确结果屏蔽掉另一个模块的计算错误,每个模块都取正确的计算结果输出到硬件表决器.表决器表决面在输出前对将要输出的信号进行一次三取二表决,选取正确的结果输出.在这一表决面设置了两个相同的表决器,最后将这两个表决器的表决结果再进行一次比较验证,如果一致就输出结果,否则就使用安全输出原则并报警,通过这样的策略消除表决器的单点故障。
无人机冗余系统控制设计与优化研究
无人机冗余系统控制设计与优化研究随着科技的发展,无人机已经成为了重要的航空工具。
无人机的出现不仅大大缩短了我们人类的时间和空间,也能够更好地为我们的生活和工作提供帮助。
虽然无人机的控制和使用已经越来越成熟,但是无人机的安全问题始终是人们关注的重点。
无人机的冗余系统控制设计以及优化研究就成为了无人机一个非常重要的研究方向。
1.无人机冗余系统无人机冗余系统是指在无人机出现故障或者性能不足的时候,自动地启用备用系统,并且在保证无人机安全的同时完成飞行。
由于无人机的构造和操作方式,无人机具有很高的自主性。
因此,冗余系统的设计对于无人机的飞行安全至关重要。
冗余系统主要有两种:硬件和软件。
软件冗余系统是通过编程方式,实现自动地备份和自动地运行控制逻辑的一种冗余方式。
硬件冗余系统则是将控制量通过多个控制器来执行,保证传感器和执行器的安全及时性和备份,从而保证整个系统的可靠性。
2.无人机冗余系统的优化设计随着无人机的应用越来越广泛,冗余系统的优化设计不仅取决于航空系统的设计,还取决于其他环境的因素,比如说外部气压、气温、湿度以及风速等。
在设计无人机的冗余系统时,需要根据不同的情况对系统进行相应的优化设计。
例如,在飞行过程中,无人机遇到强风或者气压突变,控制器会自动调整无人机转动的速度和角度,保证无人机能够平稳、安全地飞行。
而在控制过程中,控制器也需要不断地根据夹角、速度等参数进行计算和调整,确保无人机始终处于安全和稳定的状态。
3.无人机冗余系统的应用和发展前景随着无人机技术的不断成熟,无人机冗余系统的应用也越来越广泛。
目前,无人机冗余系统主要应用于军事、安防、气象和环保等领域。
无人机可以飞到人类无法到达的地方,搜救失踪飞机和船只。
通过应用无人机,可以有效地防范罪案发生,促进社会的安全和稳定。
在无人机冗余系统的发展前景方面,未来无人机冗余系统的技术将会更加先进和智能化。
未来,无人机将会大规模进入消费市场,进一步普及和优化无人机系统把各种元器件融合到一块,提高整个系统的调用效率。
第20章 冗余系统

第二十章冗余系统20.1概述KingSCADA 提供全面的冗余功能,能够有效地减少数据丢失的可能,增加了系统的可靠性,方便系统维护。
KingSCADA提供四重意义上的冗余功能,即双机热备、双网络冗余、双设备冗余、双IOServer。
本章将详细介绍这四种冗余的实现方法。
在介绍冗余功能之前,我们先来了解一下通道的概念:串口和专用网卡是专用通道,客户可以两种都配置也可以只选择其中一种或者都不配置。
其中串口负责检测冗余机状态,而专用网卡负责冗余机之间的数据同步,当串口通讯中断或者没有配置的时候,专用网卡将会负责状态检测和数据同步任务,当串口通讯恢复后,串口接着进行冗余状态的检测。
如果配置了专用通道,系统会优先使用专用通道;如果专用通道的连接中断,系统会自动选择网络配置中的其他网络连接进行通信,当专用通道恢复后,系统会自动切换回专用通道进行通信。
如果不使用专用通道,系统将自动选择网络配置中的主从机之间的网络进行冗余状态检测和数据的同步。
根据以上的描述可以看出几个通道的优先级:专用串口>专用网卡>普通网卡在下面的网络配置中会涉及到通道的配置。
20.2双机热备双机热备是指主机和从机通过TCP/IP网络进行连接,正常情况下主机处于工作状态,从机处于监视状态,一旦从机发现主机异常,从机将会在很短的时间内代替主机,完全实现主机的功能。
系统结构示意图如图所示:图20-1 双机热备系统结构图20.2.1双机热备的功能KingSCADA提供如下服务器冗余功能:1、实时数据服务器的冗余主从实时数据服务器的运行系统之间保持心跳,用于检测对方的运行状况,同时主从机之间将会同步实时数据。
主机正常,从机启动:主机变成激活态向从机同步数据。
主机当机,从机正常:从机变成激活态并尝试连接主机。
主机恢复,从机正常:主机转成备份态,从机向主机同步数据。
2、历史数据服务器的冗余实时数据服务器会将历史数据发送给主从历史数据服务器。
主从两个历史数据库之间不进行数据同步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KingSCADA
冗余系统-常见问题解答
北京亚控科技发展有限公司
2012年10月
目录
1. KingSCADA 提供哪些冗余功能? (1)
2. 配置了双机热备,主机当机后,从机激活,当主机恢复后,从机还是激活状态,主机处于从机状态了? (1)
3. 服务器双机热备的配置,在客户端工程要怎样配置? (1)
4. 怎样判断双机热备的主从机激活状态? (1)
5. 工程配置为双机热备,发现从机无法登录,总是提示用户不对? (2)
1. KingSCADA 提供哪些冗余功能?
KingSCADA提供四重意义上的冗余功能,即双机热备、双网络冗余、双设备冗余、双IOServer冗余。
2. 配置了双机热备,主机当机后,从机激活,当主机恢复后,从机还是激活状态,主机处于从机状态了?
KingSCADA的双机热备功能,主从机状态切换与组态王不同。
组态王的主从冗余是绝对主从,主机当机后,从机激活,当主机恢复后,主机为激活状态,从机转为热备状态。
KingSCADA的主从冗余是相对主从,主机当机后,从机激活,主机恢复后,从机还保持激活状态,原来的主机转为备份状态。
KingSCADA的双IOServer冗余也是相对主从的方式。
3. 服务器双机热备的配置,在客户端工程要怎样配置?
双机热备,对于客户端来说,只需要指定其实时数据服务器、报警事件服务器和历史数据服务器的主机,当主机出现故障时。
客户端会自动转为与相应的从机通讯。
4. 怎样判断双机热备的主从机激活状态?
KingSCADA提供有双机热备状态的系统变量,系统变量$RedundantStatus是用来表示主从机状态的,不论该站点是历史数据服务器,报警数据服务器或是实时数据服务器。
在主机上,该变量的值为正数,在从机上,该变量的值为负数。
主机状态监控:
在主机工程中可以通过$RedundantStatus对主机进行监控。
变量$RedundantStatus有以下几种状态:
$RedundantStatus=1,此时主机为激活态
$RedundantStatus=2,此时主机为备份态
从机状态监控:
在从机工程中可以通过$RedundantStatus对从机进行监控。
变量$RedundantStatus有以下几种状态:
$RedundantStatus=-1,此时从机为备份态
$RedundantStatus=-2,此时从机为激活态
手动状态切换:
特殊情况下可以通过强制$RedundantStatus实现主、从机之间的手动切换。
主机切换到从机:强制主机的$RedundantStatus为2,主机停止工作并停止响应从机查询,从机认为主机故障,启动工作,此时主机将没有任何工作,同时主机的数据也将不再变化。
主机启动后,强制从机的$RedundantStatus为-1,则主机的$RedundantStatus 自动变为1,从而实现了从机向主机的切换。
注:强制操作只能从激活态的机器上进行。
5. 工程配置为双机热备,发现从机无法登录,总是提示用户不对?
双机冗余的机制就是从机不允许激活,因此无法登录用户。