1_坐标轮换法
坐标轮换法汇总

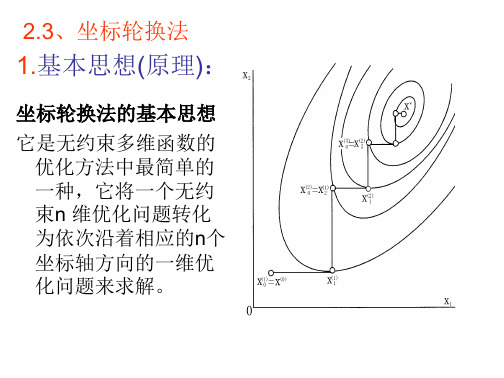
4.7坐标轮换法1. 基本思想:每次以一个变量坐标轴作为搜索方向,将n维的优化问题转化为一维搜索问题。
例,第k轮迭代的第i次搜索,是固定除xi外的n-1个变量,沿xi变量坐标轴作一维搜索,求得极值点xi(k)…n次搜索后获得极值点序列x1(k), x2(k ),…,xn(k),若未收敛,则开始第k+1次迭代,直至收敛到最优点x*。
2. 搜索方向与步长:第k轮第i次搜索的方向:S(k)为第i个设计变量的坐标轴方向;第k轮第i次搜索的步长:: i(k)S i(k);第k轮第i次搜索的迭代公式:X j(k)=人「k)叱盯⑹S j(k), i =1,2,..., n; 第k轮第i次搜索的收敛条件:G i(k)S(k)兰缶3. 方法评价:方法简单,容易实现。
当维数增加时,效率明显下降。
收敛慢,以振荡方式逼近最优点。
受目标函数的性态影响很大。
如图a)所示,二次就收敛到极值点;如图b)所示,多次迭代后逼近极值点;如图c)所示,目标函数等值线出现山脊(或称陡谷) ,若搜索到A点,再沿两个坐标轴,以土tO步长测试,目标函数值均上升,计算机判断A点为最优点。
事实上发生错误。
4.8 Poweel 法1. 基本思想:若沿连接相邻两轮搜索末端的向量S 方向搜索,收敛速度加快。
其中: S=X2⑵-X2⑴ 因为两条平行线 S1, S2与同心椭圆族相切,两个切点的连线 S 直指中心。
称 S1, S2与S 为共轭方向。
目的:以共轭方向打破振荡,加速收敛。
2. 共轭方向:*设A 为实对称正定矩阵,若有两个n 维向量S 和S 2, 满足 S 1T AS 2 =0,则称向量3和S 2是关于矩阵共轭, ^和s 2的方向是共轭方向。
*若A 为单位矩阵I ,贝y S /|S 2 =0时,即S,S 2=0, 则 S^^S 2正交。
*设A 为正定实对称矩阵,若有一组非零向量S 11S 21...,S ni能满足 S 「AS j =0(i = j),则称这组向量是关于矩 阵A共轭。
机械优化设计讲义第7讲

(n个坐标轴单位向量 e1, e2 ,, en )
2)从
X
k 0
出发,顺次沿
d1k
,
d 2k
,,
d
k n
作一维搜索得
X
k 1
,
X
k 2
,,
X
k n
。
接着以
X
k n
为起点,沿方向
dk n1
X
k n
X
k 0
移动一个
X
k n
X
k 0
的距离,得到:
Xk n1
X
k n
(
X
k n
X
k 0
)
2
X
k n
X
k 0
X 0k、X nk、X nk1分别称为一轮迭代的始点、终点和反射点。 始点、终点和反射点所对应的函数值分别表示为:
共轭梯度法
d0=-g0
d k 1 gk 1
g2 k 1
gk 2
dk
1阶导数
计算较简单,收敛速度较快, 常用于多变量的优化设计
DFP 变尺度法
坐标轮换法 鲍威尔法
H0=I
H k 1
Hk
sk skT skT yk
Hk yk ykT Hk ykT Hk yk
dk=-Hkgk
dk=ek dk=Xk-Xk-1
(2)直接法: 通过计算“目标函数”值确定dk的方向。 坐标轮换法,鲍威尔法
特点 方法
无约束优化方法特点
搜索方向d k
所用目标 函数信息
特点
最速下降法
dk=-gk
1阶导数
初始点的选择要求低,最初 迭代函数值下降很快
阻尼牛顿法
坐标轮换法编程

for(i=0;i<n;i++)
{
x1[i]=x0[i];
x2[i]=x0[i]+h*s[i];
}
f1=f(x1);
f2=f(x2);
if(f2>=f1)
{
h=(-1)*h;
for(i=0;i<n;i++)
x3[i]=x1[i];
scanf("%f",&h);
printf("\n请输入黄金分割法迭代精度:\n");
scanf("%f",&flag1);
printf("\n请输入坐标轮换法迭代精度:\n");
scanf("%f",&flag2);
zblhf(n,x0,h,flag1,flag2,a,b,x);
{
int i,k;
float x1[m],s[m][m],sum,c,d;
printf("输入搜索方向:\n");
scanf("%f%f",&c,&d);
for(i=0;i<n;i++)
{
for(k=0;k<n;k++)
if(k==0)
#include <stdio.h>
#define m 10
float f(float x[]);
void mjtf(int n,float x0[],float h,float s[],float a[],float b[]);
void mhjfgf(int n,float a[],float b[],float flag,float x[]);
坐标转换方案

坐标转换方案1. 背景在实际应用中,我们经常会遇到不同坐标系之间的转换问题。
例如,将经纬度坐标转换为平面坐标,或者将三维坐标转换为二维坐标等。
坐标转换在地理信息系统、测绘工程、导航系统等领域都发挥着重要作用。
本文将介绍常见的坐标转换方案和相应的算法。
2. 坐标系2.1 笛卡尔坐标系笛卡尔坐标系是平面或空间中用直角坐标来表示点的位置的一种坐标系统。
它由原点和一组互相垂直的坐标轴组成,常用于二维和三维空间中。
2.2 经纬度坐标系经纬度坐标系是地球上用来表示地理位置的一种坐标系统。
它由纬度和经度两个参数组成,纬度表示点距离赤道的距离,经度表示点距离本初子午线的角度。
2.3 UTM坐标系UTM(Universal Transverse Mercator)坐标系是一种平面坐标系,常用于大范围的地图测量和平面投影。
其将地球划分为60个横向带区和20个纵向带区,每个带区内有一个标准子午线。
UTM坐标系使用东北坐标表示位置。
3. 坐标转换方案3.1 经纬度->平面坐标将经纬度坐标转换为平面坐标是常见的需求,特别是在地图显示和导航系统中。
常用的转换算法有如下几种:•投影方法:根据不同地图投影方式的特点,将经纬度坐标投影到平面上。
常见的投影方法有墨卡托投影、高斯投影等。
•大地坐标系转换:将经纬度坐标转换为大地坐标系的X、Y、Z三维坐标,然后再将其投影到平面上。
3.2 平面坐标->经纬度将平面坐标转换为经纬度坐标也是常见的需求,例如根据地图上的点位置获取其经纬度信息。
以下是两种常见的转换算法:•反投影方法:根据投影坐标系的特点,将平面坐标反过程,得到经纬度坐标。
•大地坐标系转换:将平面坐标转换为大地坐标系的X、Y、Z三维坐标,然后再将其转换为经纬度坐标。
3.3 三维坐标转换在一些应用中,需要将三维坐标转换为二维坐标,或者反过来。
例如,在飞行模拟、建筑设计等领域都需要进行三维坐标转换。
以下是两种常见的转换算法:•平行投影方法:通过将三维坐标映射到平面上,实现三维坐标转换为二维坐标。
(06)第四章-无约束优化方法(坐标轮换法)
第四章 无约束优化方法 §4-7 坐标轮换法
§4-3 坐标轮换法
间接法:梯度法;牛顿法;变尺度法 共同点:求导数 直接法:直接用函数值 搜索方向如何定?
坐标轮换法的基本思想:
把n维无约束优化问题转化为一系列一维优化问题来求 解,即沿着n个坐标轴方向e1,e2……en顺次进行一维搜索, 每n次搜索记为一轮,轮换迭代,求解极值点。 基本迭代格式:
(1) T x = [0 0] ε = 0.1 初始点 0 的最优解。迭代精度 ,
z
课后练习题: 用坐标轮换法求目标函数(迭代两轮)
f ( x ) = x12 + 16 x 22 + 10 x1 x 2
(1) T x = [4 3] ε = 0.1 初始点 0 的最优解。迭代精度 ,
算法特点:
1)不需对目标函数求导,方法简单; 2)收敛速度通常较低(其有效性取决于目标 函数的性态),仅适于低维的情况。
x
(k ) i
=x
(k ) i −1
+α e
(k ) i i
(k = 1,2,3"; i = 1,2," n)
收敛准则:
(k ) x0( k ) − xn ≤ε
图4-12 坐标轮换法的基本原理示意图
计算步骤:
1)对于n个变量的函数,若在第k轮沿着第i个坐标 方向进行搜索,其迭代公式为: k k k i i −1 i i k 2)求最优搜索步长 α
x = x +α e
i
3)本轮所有方向搜索完毕,判断迭代终止条件:
x −x
k n
k 0
≤ε
k n
4)满足上式:
x =x
∗
1.4.坐标轮换法(或称因素轮换法)-人教B版选修4-7优选法与试验设计初步教案

1.4 坐标轮换法(或称因素轮换法)-人教B版选修4-7优选法与试验设计初步教案一、教学目标1.理解坐标轮换法(或称因素轮换法)的基本概念和原理。
2.掌握坐标轮换法的具体应用方法,能够通过实例运用坐标轮换法解决实际问题。
3.了解优选法和试验设计的相关知识,并初步运用到实验设计中。
二、教学重点1.坐标轮换法的基本概念和原理。
2.坐标轮换法的具体应用方法。
3.优选法和试验设计的相关知识。
三、教学难点1.坐标轮换法的应用方法,要求学生能够对实际问题进行分析和解决。
2.优选法和试验设计的实际应用。
四、教学过程1. 引入(5分钟)老师通过实例引入,让学生了解实际应用中的问题,并对坐标轮换法(或称因素轮换法)的用途有一个初步了解。
2. 理论知识(20分钟)1.坐标轮换法的基本概念和原理。
2.坐标轮换法的应用条件和步骤。
3. 实例演练(30分钟)老师将给出两个例子进行演练,并要求学生运用坐标轮换法解决问题。
4. 优选法和试验设计(20分钟)1.优选法的基本原理和应用方法。
2.试验设计的基本概念和方法。
5. 实践应用(30分钟)老师将给出一个实际问题,要求学生通过运用优选法和试验设计的知识,解决问题。
6. 总结(5分钟)老师对本节课的知识点进行简单总结并提出问题,要求学生下节课认真复习,并准备好课堂小测。
五、教学方法1.案例教学法:通过实例解决问题,让学生在实践中掌握知识。
2.问答式教学法:老师通过问答的方式,引导学生深入理解知识点。
3.探究式学习法:引导学生在实践中发掘问题,并探索解决问题的方法。
六、教学评估方式1.课堂测验:每节课结束后进行小测验,巩固学生的知识理解。
2.作业检查:老师对学生布置的作业进行检查和点评。
测绘技术中的坐标变换和转换方法

测绘技术中的坐标变换和转换方法引言:测绘技术是指以地球为基准,通过各种手段对地球表面进行测量和绘制的一门技术。
而在测绘过程中,坐标变换和转换方法是至关重要的环节。
本文将介绍测绘技术中常用的坐标变换和转换方法,旨在帮助读者更好地理解和运用这些方法。
正文:一、坐标变换方法1. 正射投影正射投影是将地球表面投影到一个垂直于地平面的平面上,使得地球上的点在投影平面上的坐标与其地理坐标之间成一一对应的关系。
通过正射投影可以实现地球表面的快速绘制和分析,广泛应用于卫星遥感、地图制图等领域。
2. 点位变换点位变换是指将某一坐标系统中的点位坐标转换到另一坐标系统中的过程。
其中常见的方法有三角法、相似变换、仿射变换等。
这些方法根据需要的精度和计算复杂度的不同,可选用不同的点位变换方法。
3. 地心坐标系转换地心坐标系是以地球质心为原点,地球自转轴为Z轴正方向建立的三维坐标系。
在测绘中,常在不同地心坐标系间进行转换。
这需要考虑地球椭球体参数、基准面、坐标单位等因素,以确保转换的准确性。
二、坐标转换方法1. 大地坐标转换大地坐标转换是指将地球上一点的大地坐标(经度、纬度、大地高)转换到另一坐标系统中。
在转换过程中,需要考虑椭球体参数、坐标基准面、大地高与海拔高之间的关系等。
这对于地球上各类工程测量和地图制图具有重要的意义。
2. 平面坐标转换平面坐标转换是将地球上一点的大地坐标(经度、纬度)转换到平面坐标(如笛卡尔坐标系、高斯投影坐标系)中的过程。
这种转换方法广泛应用于各种工程测量和地理信息系统中,以实现地球表面的精确定位和绘制。
3. 坐标参考系转换坐标参考系转换是将某一坐标系统的坐标转换到另一坐标系统的过程。
例如,将地理坐标转换为投影坐标、将时间坐标转换为空间坐标等。
这种转换方法在卫星导航、地震监测等领域中具有重要的应用价值。
结论:坐标变换和转换方法在测绘技术中起到了至关重要的作用。
它们不仅可以帮助实现地球表面的精确测量和绘制,还可以提供必要的数据支持和决策依据。
坐标转换最简单方法
坐标转换最简单方法
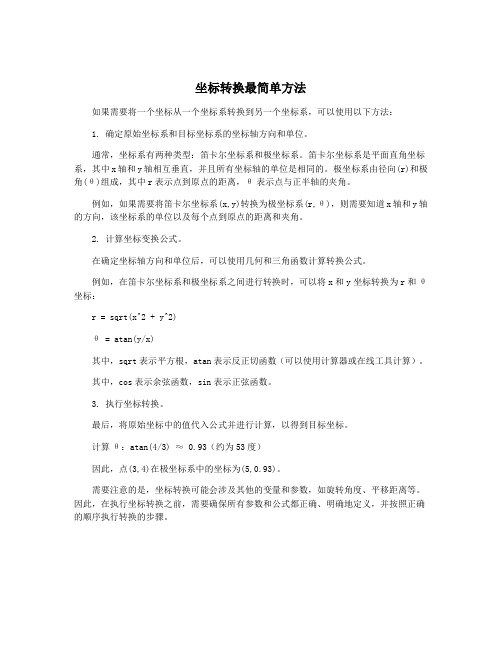
如果需要将一个坐标从一个坐标系转换到另一个坐标系,可以使用以下方法:
1. 确定原始坐标系和目标坐标系的坐标轴方向和单位。
通常,坐标系有两种类型:笛卡尔坐标系和极坐标系。
笛卡尔坐标系是平面直角坐标系,其中x轴和y轴相互垂直,并且所有坐标轴的单位是相同的。
极坐标系由径向(r)和极角(θ)组成,其中r表示点到原点的距离,θ表示点与正半轴的夹角。
例如,如果需要将笛卡尔坐标系(x,y)转换为极坐标系(r,θ),则需要知道x轴和y轴的方向,该坐标系的单位以及每个点到原点的距离和夹角。
2. 计算坐标变换公式。
在确定坐标轴方向和单位后,可以使用几何和三角函数计算转换公式。
例如,在笛卡尔坐标系和极坐标系之间进行转换时,可以将x和y坐标转换为r和θ坐标:
r = sqrt(x^2 + y^2)
θ = atan(y/x)
其中,sqrt表示平方根,atan表示反正切函数(可以使用计算器或在线工具计算)。
其中,cos表示余弦函数,sin表示正弦函数。
3. 执行坐标转换。
最后,将原始坐标中的值代入公式并进行计算,以得到目标坐标。
计算θ:atan(4/3) ≈ 0.93(约为53度)
因此,点(3,4)在极坐标系中的坐标为(5,0.93)。
需要注意的是,坐标转换可能会涉及其他的变量和参数,如旋转角度、平移距离等。
因此,在执行坐标转换之前,需要确保所有参数和公式都正确、明确地定义,并按照正确的顺序执行转换的步骤。
机械优化设计第四节无约束--坐标轮换法3-5解析
5
7.954 , 5.978 T 0.035 7.989 , 5.978T 0.018 7.989 , 5.996 T 0.04
计算第五轮的有
(5) (5)
x2 x0 (7.989 7.954)2 (5.996 5.978)2 0.0394
近似优化解为:
* (5) 7.989 x x2 5.996
*
f * f (x ) 8.000093
2.4、共轭方向法
1、共轭方向
坐标轮换法的收敛速度很慢,原因在于其搜索方向总是
平行于坐标轴,不适应函数变化情况如图所示若把一轮的起
点 与末点 (1)
(1)
x1
x2
连起来形成 一个新的搜索方向
S2
,
S2 与
S1 有何关系。
如图所示,设给定两个平行方向 S1 ,从两个任意初始点分别
)
e
i
否
in
是
(k) (k)
xn x0
否
是
k k 1
(0)
(k)
x xn
*
*
x x f f (x )
出口
特点: 简单易行,但由于它只能轮流沿几个坐标
方向前进,因而效率低下,特别是维数较高n>10 或目标函数性质不好的情况下收敛速度慢。本方 法的收敛效率在很大程度上取决于目标函数等值 线的形状。当椭圆簇的长短轴与坐标轴斜交,迭 代次数将大大增加,收敛速度很缓慢。目标函数
S2
*
x
S1
x
2
x1
S1
如图所示,同心椭圆簇具有 这样一个特点,就是二条任 意平行线的切点的连线必通 过椭圆族的中心。
沿这两个平行方向进行一维搜索求得极小点
第四节无约束--坐标轮换法3-5

S
1 1
x2
1
x
S1
共轭方向的定义: 设A 为 n n阶实对称正定矩阵,而 S1 S 2为 n n R 中的两个非零向量,如果满足S1 T AS 22 0 维空间 则称向量 S1 S 2 关于对称正定矩阵A 是共轭的或
S1 , S 2 关于A 共轭
共轭方向的性质 1)设 A为 n n 阶实对称正定矩阵, S1 S 2 S n 为对A共轭的n个非零向量,则这n个向量是 线形无关的
由于两平行方向 S1为等值线的切线,其切点分别为
1 2
x, x
故方向
1 2
S1
应垂直于 x
1
2
,
x
处的梯度方向.
即有
x, x
为目标函数 f ( x)在 S1 方向的极小点
1
所以在 两点目标函数的梯度 f ( x )
f ( x )
2
都与 矢量
S1 正交即有
* * 1 * T T S1 f ( x ) S1 f ( x ) 2 f ( x ) x x 0 2 * * 2 * T T S1 f ( x ) S1 f ( x ) 2 f ( x ) x x 0 1
e 0, 1, 0
' 得到 x 且将前一次一维搜索的极小点作为本次一维搜 索的起始点,依次进行一维搜索后,完成一轮 ' 计算,若未收敛则以前一次的末点 x n 为起始 点,进行下一轮的循环,如此一轮一轮迭代下 去,直到满足收敛准则,逼近最优点为止。 2.迭代计算步骤 (1) (0) 1)取初始点 x 作为第一轮的起点 x x x 迭代终止 精度 置 个坐标轴方向矢量为单位坐标矢量
坐标系之间的换算
LX n
T
B B1
ˆ VX BY LX
B2 Bn
X 0 Y0 Z 0 Y dK X Y Z
则误差方程 法方程
ˆ B T PBY B T PLX 0
顾及
0 QX i Z Y
Z
0 X
Y X i 0 X Yi Z i 0 Z i Yi
Zi 0 Xi
Yi X X i Y 0 Z
地心空间 直角坐标系 参心空间 直角坐标系 割平面空间 直角坐标系 法线测量 坐标系 垂线测量 坐标系
高斯平面 直角坐标系
导弹发射 坐标系
一、不同空间直角坐标系的换算
参心←→参心空间直角坐标系间(如:克氏椭球←→IAG75椭球) 参心←→地心空间直角坐标系间(如:克氏或IAG75椭球←→WGS-84椭球) 三个变换公式(布尔莎、范士、莫洛金斯基)对于坐标换算而言等价,推导布 尔莎公式如下:
1 X
Y 1 0 0 0 X 0 1 0 Z 1 0 0 1 Y
Z
0 X
Y X E Q 0
代入(10-28)式,忽略二阶微小量dKQXi得 XTi=⊿X0+R()dKXi+R()Xi =⊿X0+(E+Q)dKXi+(E+Q)Xi =⊿X0+dKXi+Xi+QXi
dX dB da dY A dL C d dZ dH
顾及到
0 QX i Z Y
Z
0 X
机械优化设计方法——鲍威尔法,坐标轮换法
鲍威尔法
机械优化设计方法——鲍威尔法
鲍威尔(Powell)法是直接利用函数值 来构造共扼方向的一种共扼方向法。基本 思想是在不用求导数的前提下,在迭代中 逐次构造Hessian矩阵G的共扼方向。
原始共轭法的缺点
对于n维无约束最优化问题,采用原始共轭 方向法在产生n个共轭方向时,有可能是线 性相关或接近线性相关的,遇这种情况, 会导致在降维空间寻优使迭代计算不能收 敛到真正最优点而失败 。
(4)判断是否满足收敛准则。
即
X k 1 X k
。若满足,则
X k1 0
为
极小点,否则应置 k k 1 ,返回,
继续进行下一轮迭代。
计算 f (X ) x12 25x22 的极小值
解 : 选取初始点为 X 0 2,2T,初试搜索方向
为 d10 1,0T,d20 0,1 T。初始点处 的函数
值
F1
f
(
X
0 0
)
104
第一轮迭代:沿 d10 方向进行一维搜
索,得
X10
X
0
1d10
2
1
1 0
2
1
2
将
X
0 1
代入原方程得:
f1 f (X10) (2 1)2 2522 4 41 12 100
最佳步长
:
df ( d
)
4
21
0
1 2
X10
2 2
210
0 2
X
0 1
鲍威尔法计算步骤与程序原理
(1)任选一初始点 X 0 ,
X
0 0
X
0
,选取初
试方向组,它由n个线性无关的向量
1_坐标轮换法
ei=(0,…,0,1,0,…,0)T,i=1,2,…,n,
进行最优一维搜索,即
第i 个分量
0.618法或 二次插值法
终止准则
f
( xk
kek1 )
min
f
( xk
ek1 )
xk1 xk kek1 , k 0,1,...,n 1.
循环
.
初始点
否则,从点xn出发,再依次沿坐标轴方向ei 进行最优一 维搜索.
坐标轮换法
简介
坐标轮换法由D’esopo于1959年提出.
坐标轮换法是每次搜索只允许一个变量变化,其余变量 保持不变,即沿坐标方向轮流进行搜索的寻优方法。
坐标轮换法把多变量的优化问题轮流地转化成 单变量的优化问题.
坐标轮换法
基本原理 搜索方向与步长
给定初始点x0, 从x0出发,依次沿坐标轴方向
x0:=xn
算法步骤
Step1 Step2
坐标轮换法
Step3 Step4
坐标轮换法
举例
全局收敛性
存在的问题 坐标轮换法
坐标轮换法在各种不同情况下的效能 (a)搜索有效;(b)搜索低效;(c)搜索无效
ቤተ መጻሕፍቲ ባይዱ
人教版B版高中数学选修4-7(B版)坐标轮换法(或称因素轮换法)

(2)对格子点的情况,也适用于坐标转 换法和平行线法。在固定一个因素时,不使 用0.618法,而使用分数 Fn1 。
Fn
双因素爬山法
人从山上某处出发,要想爬到山顶, 可用明杖向前后左右试探性一步一步往 高处前进,当四面都不再高时即到达山 顶。运用这个方法寻找双因素问题的最 佳点就是双因素爬山法。
坐标轮换法 平行线法
双因素的离散情形 双因素爬山法
• 坐标轮换法
课题引入
所谓“轮换法”,主要是指在保证效果 相同的前提下,将不可见、不易见的现象转 换成可见、易见的现象;将陌生、复杂的问 题转换成熟悉、简单的问题;将难以测量或 测准的量转换为能够测量或测准的量的方法。 初中物理在研究概念规律和实验中多处应用 了这种方法。
练习:如图,用平行线法处理双因素问题时, 首先将难以调整的因素Ⅱ固定在0.618处,得
到0比定.最在A318处佳_2_处的点__,好在__得,A_1_到则处处最第,。佳然三点后次A再试2,把验若因时A素,2处将Ⅱ的因固试素定验Ⅱ结在固果
解析:
因为A2处的试验结果比A1处的好,所以
好点在因素Ⅱ的0~0.618之间,由0.618法 ,第三次试验时,将因素Ⅱ固定在 0.618 +0-0.382=0.236处。
这个方法还可以应用在某些可变因素要 调到某点,必须经过由小到大或由大到小的 连续过程的问题上。像改变气体和液体的流 速、温度;仪器调试中的可变电容、可变电 阻;等等,采用爬山法比较合适.试验中,可 以边调整边检查,调到最佳点时就固定下来。 一般在大生产中爬山法较常用。
爬山法的效果快慢与起点关系很大,起 点选得好可以省好多次试验。所以对爬山来 说,试验范围的正确与否很重要。另外,每 步间隔的大小,对试验效果关系也很大。在 实践中往往采取“两头小,中间大”的办法。 也就是说,先在各个方向上用小步试探一下, 找出有利于寻找目标的方向,当方向确定后, 再根据具体情况跨大步,快接近最佳点时再 改为小步。如果由于估计不正确,大步跨过 最佳点,这时可退回一步,在这一步内改用 小步进行。一般说来,越接近最佳点的时候, 效果随因素的变化越缓慢。
人教B版高中数学选修4-7课件 1坐标轮换法(或称因素轮换法)课件1

➢ 当目标函数等值线出现“脊线”时,沿坐标 轴方向搜索均不能使函数值有所下降,该方法 在求优过程中将失败,这类函数对坐标轮换法 来说是“病态”函数。如下图(c)。
The End
向),且将前一次一维搜索的好点作为本次一维搜
索的好点作为本次一维搜索的起始点,依次进行一
维搜索后,完成一轮计算。若未收敛,则以前一轮
的末点
X
1 n
为起始点,进行下一轮的循环,如此一
轮一轮迭代下去,直到满足收敛准则,逼近最优点
为止。
二维坐标轮换法的迭代示意图
迭代步骤:
1.任选初始点 X 0 [ x10 , x20 , xn0 ]T作为第一轮 的起点 X,01 置n个坐标轴方向矢量为单位坐 标矢量
X
K n
X
K 0
若满足,迭代终止,并输出最优解
X*
X
K n
f * f (X *)
坐标轮换法特点:
1.方法结构简单,易于掌握,但计算效率低, 对维数较高的优化问题更为突出,通常用于低 维优化问题;
2.本方法的收敛效果在很大程度上取决于目标 函数等值线的形状。
➢ 等值线为椭圆族,其长、短轴与坐标轴
平行或圆族等值线,该方法收敛效果好,速度 快。如下图(a)
1.4.3 《坐标轮换法(或 称因素轮换法)》
数学人教B版高中选修4-7《优选法与试验设计初步》
坐标轮换法
坐标轮换法又称变量轮换法,属于直接法,其 基本原理为:将一个多维无约束优化问题转换为一 系列一维优化问题来求解,即依次沿着坐标轴的方 向进行一维搜索,求得极小点。
对于n维无约束优化问题,先将(n-1)个变量固
测绘工程中的坐标变换方法与注意事项
测绘工程中的坐标变换方法与注意事项在测绘工程中,坐标变换是将不同坐标系统之间的坐标进行转换的过程。
由于地球是一个椭球体,而测绘工程中常用的坐标系统是平面坐标系统,因此需要通过坐标变换将平面坐标系统与地理坐标系统之间进行转换。
本文将介绍测绘工程中常用的坐标变换方法,并提出一些注意事项。
一、坐标变换的目的和方法坐标变换的目的是将不同坐标系统中的点的坐标进行转换,以实现数据的相互对应和转换。
常用的坐标变换方法有三种:经纬度转换为平面直角坐标、平面直角坐标转换为经纬度和平面直角坐标之间的转换。
1. 经纬度转换为平面直角坐标经纬度是一种地理坐标系统,常用于地图制图和导航等应用。
在将经纬度转换为平面直角坐标时,需要考虑地球的椭球体形状和各地区的投影方式。
常用的投影方式有高斯投影、UTM投影等。
通过将经纬度投影到平面上,并根据投影方式进行转换,可以得到点在平面直角坐标系中的坐标。
2. 平面直角坐标转换为经纬度相对于经纬度来说,平面直角坐标系统更便于进行计算和测量。
在将平面直角坐标转换为经纬度时,需要考虑地球的椭球体形状和各地区的投影方式。
通过将平面直角坐标反投影到地球上,并根据投影方式进行转换,可以得到点的经纬度坐标。
3. 平面直角坐标之间的转换在测绘工程中,常常需要在不同的平面直角坐标系统之间进行转换。
例如,将国家统一坐标系转换为本地坐标系,或者将测量坐标系转换为计算坐标系。
这种转换需要考虑坐标系的参数和转换公式,以确保转换精度和一致性。
二、注意事项在进行坐标变换时,需要注意一些问题和细节,以确保转换的准确性和可靠性。
1. 坐标系的选择在进行坐标变换前,需要确定使用哪种坐标系进行计算和测量。
常用的坐标系有国家统一坐标系、WGS84坐标系等。
根据实际需求和测绘项目的要求,选择适应的坐标系进行坐标变换。
2. 坐标转换参数的确定坐标转换参数是进行坐标变换的关键。
不同坐标系统之间的转换需要不同的参数,包括投影方式、椭球体参数、转换公式等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ei=(0,…,0,1,0,…,0)T,i=1,2,…,n,
进行最优一维搜索,即
第i 个分量
0.618法或 二次插值法
终止准则
f
( xk
kek1 )
min
f
( xk
ek1 )
xk1 xk kek1 , k 0,1,...,n 1.
循环
.
初始点
否则,从点xn出发,再依次沿坐标轴方向ei 进行最优一 维搜索.
x0:=xn
算法步骤
Step1 Step2
坐标轮换法
Step3 Step4
坐标轮换法
举例
全局收敛性
存在的问题 坐标轮换法
坐标轮换法在各种不同情况下的效能 (a)搜索有效;(b)搜索低效;(c)搜索无效
坐标轮换法
简介
坐标轮换法由D’esopo于19ቤተ መጻሕፍቲ ባይዱ9年提出.
坐标轮换法是每次搜索只允许一个变量变化,其余变量 保持不变,即沿坐标方向轮流进行搜索的寻优方法。
坐标轮换法把多变量的优化问题轮流地转化成 单变量的优化问题.
坐标轮换法
基本原理 搜索方向与步长
给定初始点x0, 从x0出发,依次沿坐标轴方向