车载激光移动建模测量系统点云精度检核与误差来源分析
车载激光点云数据精度分析方法课件

点间距精度评估
总结词
点间距精度评估是衡量点云数据中相 邻点之间距离的精度,是评估点云数 据质量的重要指标之一。
详细描述
点间距精度评估采用统计方法,计算 点云数据中相邻点之间的距离与实际 距离之间的偏差。偏差越小,点间距 精度越高,点云数据质量越好。
角度精度评估
总结词
角度精度评估是衡量点云数据中角度信息的精度,用于评估点云数据的方向和角 度准确性。
详细描述
角度精度评估采用统计方法,计算点云数据中相邻点之间的角度与实际角度之间 的偏差。偏差越小,角度精度越高,点云数据质量越好。
04
车载激光点云数据精度提 升方法
数据采集设备优化
01
02
03
设备校准
对车载激光雷达进行精确 校准,确保其测距和角度 测量精度。
传感器标定
定期对传感器进行标定, 以修正因环境因素(如温 度、湿度)导致的测量误 差。
探索车载激光点云数据在自动 驾驶、智能交通等领域的应用 ,以推动相关技术的进一步发 展和普及。
THANKS
感谢观看
数据预处理是提高车载激光点云数据 精度的关键步骤,包括去噪、滤波、 拼接等操作。
滤波主要是平滑点云数据中的噪声, 常用的滤波算法有高斯滤波、中值滤 波等。
去噪主要是去除点云数据中的离群点 ,可以使用统计方法或基于网格的方 法进行去噪。
拼接是将多个不同视角的点云数据进 行对齐,常用的拼接算法有基于特征 的拼接和基于ICP(迭代最近点)的 拼接。
案例三:森林环境数据精度分析
总结词
森林环境数据精度分析是车载激光点云数据 精度分析的重要应用之一,主要关注森林植 被的种类、高度、密度等要素的辨认和分类 精度。
详细描述
激光测量系统误差分析
激光测量系统误差分析1.激光测量系统误差源的分析激光测量系统会受到多种误差的影响,有系统误差和偶然误差,系统误差会给激光测量点云坐标带来系统偏差。
激光测量系统的误差按照其产生的来源可分为四类:(1)定位误差:GPS定位误差;(2)姿态误差:GPS/INS姿态误差;(3)测距误差:激光扫描仪测距误差;(4)集成误差:系统集成误差;(1)定位误差GPS动态定位误差主要包括卫星轨道误差、卫星钟钟差、接收机钟钟差、多路径效应、相位中心不稳定,还有卫星星座、观测噪声等。
[1]GPS定位误差不容易消除或者模型化,通常为了削弱GPS定位误差的影响,采用的方法是在测区内建立多个分布均匀的基准站,保证GPS动态定位解算时离基准站不会太远。
(2)姿态误差姿态误差是影响定位精度的最主要原因。
主要包括设备的安置误差、加速度计误差、陀螺仪漂移、测量噪声等,对于INS姿态测量误差,可以适当降低飞行高度,以削弱其对定位的影响。
(3)测距误差激光扫描仪的每一个工作过程都会带来一定的误差,但起主要作用的是电子光学电路对经过地面散射和空间传播后的不规则激光回波信号进行处理来确定时间延迟带来的误差,分别为时延估计误差和时间测量误差两类。
此外还有反光镜的旋转、震动误差、脉冲零点误差等。
激光脉冲信号照射地面物体时,由于地表物理特征的不同而产生不同的反射,当信号发生漫反射时,出现大量反射信号被接收,会形成较大的接收噪声;当信号照射到光滑物体表面,便形成镜面反射,可能会造成激光测距信号丢失。
另外,有的信号可能经过计策反射后反射回去,这样测定的时间延迟不能代表真正的时间延迟。
激光测距的精度还与地面粗糙程度、地面坡度、地面物体的干扰等有关。
另外,被水域覆盖的地方,红外激光大部分被吸收,只有少量被反射,如果碰到静止的水面,就形成镜面反射,信号反射不回去;地表不连续以及移动物体,如行人、车辆、动物等都会影响激光测距精度。
(4)系统集成误差系统集成误差主要包括激光扫描仪脉冲感应参考中心与GPS天线相位中心偏心向量的测定误差、系统安置误差、位置内插误差(线性内插)、时间同步误差、地面参考站间位置误差、坐标系间的转换误差、GPS/INS组合滤波模型误差等。
车载激光点云数据精度分析方法课件
研究不足与展望
数据来源的局限性
本研究主要针对特定型号的车载激光雷达数据进行精度分析,未能涵盖所有类型和品牌的激光雷达。未来研究可以扩 大数据集范围,以提高方法的泛化能力。
未考虑动态障碍物的影响
在实验过程中,未充分考虑动态障碍物对激光点云数据精度的影响。未来研究可以进一步完善实验场景,以更全面地 评估方法的性能。
国外研究现状
与国内相比,国外在车载激光点云数据处理方面的研究较为成熟。国外的研究不仅涵盖了点云数据的 预处理和特征提取,还重点关注了精度分析和评估。一些知名的自动驾驶公司和科研机构在激光点云 数据处理方面积累了丰富的经验,并取得了一系列重要的成果。
02
车载激光点云数据采集
激光雷达工作原理
01
激光雷达通过向周围环境发射激 光束并接收反射回来的信号,获 取周围环境的距离和角度信息, 进而生成点云数据。
提出了一种基于统计学和机器学习的方法
本研究提出了一种创新的精度分析方法,该方法结合了统计学和机器学习技术,能够更准 确地评估激光点云数据的精度,并识别出影响精度的关键因素。
实验验证与结果分析
通过大量实验验证,证实了所提出方法的有效性和优越性。实验结果还进一步分析了不同 因素对激光点云数据精度的影响,为后续研究提供了有益的参考。
算法优化与改进
虽然本研究提出的方法在精度分析方面取得了较好的效果,但仍存在改进空间。未来研究可以进一步优 化算法,提高其处理大规模数据的效率,并探索更先进的机器学习技术以提升精度分析的准确性。
感谢您的观看
THANKS
实验设置与参数优化
实验设备
介绍实验所需的设备,如高性能计算 机、激光扫描仪等,并说明设备的技 术参数和性能。
参数优化
激光雷达测量原理与误差分析

激光雷达测量原理与误差分析摘要:如今的测量工具,像全站仪和GPS接受机在测绘中的效率都较传统的仪器而言提高了许多,通过国内外的研究和应用显示激光雷达测量技术为测绘领域提供了先进的手段和方法。
激光雷达测量技术在各个领域的应用已经有几年的时间,它最大的优点就是突破了传统单点测量的数据采集处理方法,同时又不像GPS技术需要卫星的支持,为测绘领域提供了一条新的研究方向。
同时,我们还要看到作为新技术,激光雷达测量还不成熟,还需进行很多深入研究才能更好的把这一技术应用到各个领域。
而且,国家一直都没有颁布激光雷达测量技术的国家标准,这使得当我们将激光雷达测量技术应用到工程领域的时候也会产生困惑。
虽然有这些不足,但不难看出激光雷达测量技术的应用前景十分广阔。
*水利部“948”项目(201219)关键词:激光雷达;测量原理;误差引言激光雷达测量技术以模块化的空间信息数据采集手段取代了传统的单点空间信息采集方式。
其优点非常明显,如快速、精确、无接触式测量等。
但是相比传统方式,它也有一些缺陷,如扫描后的点云除噪,多站点云拼接,三维建模等,大量的数据处理工作需要在后期来完成。
新的数据采集和处理方式也带来了新的误差源。
本文简述激光雷达测量基本原理后,相应的介绍其误差源并分析其影响及一些初步控制措施。
一、激光雷达测量技术的工作原理现在,主流的激光雷达测量主要有两种测距方式,脉冲式测距和相位式测距。
脉冲式测距是通过测量激光在仪器到目标物体来回传送的时间来确定激光雷达测量仪到物体间的距离,原理非常简单,目前,市面上比较完整的地面激光雷达测量系统主要包括,激光扫描系统、激光测距系统、集成的CCD摄像机和仪器内部控制与校正系统。
相位式测距的工作原理类似于GPS的载波相位测距,通过测定调制在激光束上的调整光的波长的相位延迟,利用波长和相位差来间接计算出仪器与反射物体之间的距离。
激光雷达测量仪不仅仅是测量仪器到物体之间的距离,还要通过仪器内部的轴系系统得到仪器与目标物体的相对位置关系,从而利用已知的仪器坐标得到未知的物体空间位置信息。
车载移动测量系统点云误差分析及修正

车载移动测量系统点云误差分析及修正
唐德利;李兆雄
【期刊名称】《地理空间信息》
【年(卷),期】2016(014)008
【摘要】为使车载移动测量系统输出更高精度的基础数据——点云,对车载移动测量系统的定位误差来源进行分析,探索减小作业误差以及利用控制点进行点云修正的方法,通过实例验证控制点布设数量与点云精度提高的密切关系,证明布设位置合理、数量足够的控制点,能大幅提高点云精度。
【总页数】3页(P33-35)
【作者】唐德利;李兆雄
【作者单位】国家测绘地理信息局重庆测绘院,重庆 400015;国家测绘地理信息局重庆测绘院,重庆 400015
【正文语种】中文
【中图分类】P235
【相关文献】
1.车载激光移动建模测量系统点云精度检核与误差来源分析 [J], 鲁勇;王留召;郭姣;赵坤
2.应急通信车载卫星地球站自动找星系统寻星误差修正方法 [J], 刘坤
3.车载移动测量系统前方交会中的误差分析 [J], 鹿星亮;刘庆元;侯凯宇
4.基于小车载移动测量系统的点云数据精度分析 [J], 葛亚建;谭瑞珍;汪超;郝立贞
5.车载光测设备静态测角误差修正技术的研究 [J], 佟刚
因版权原因,仅展示原文概要,查看原文内容请购买。
车载激光点云数据位置精度改善的研究

2021/ 4 33作者简介:彭剑飞(1982—),男,汉族,工程师,主要从事测绘质量管理和生产。
E-mail:*****************车载激光点云数据位置精度改善的研究彭剑飞 方亿锋(广东省地质局第七地质大队,广东 惠州 516008)摘 要:在移动车载激光扫描中,城市地区GNSS 信号受到遮挡、多路径等因素影响,会带来一定的误差积累,导致采集数据的几何位置出现较大偏差,严重影响后续的数据处理。
为解决中心城区不同偏差级别的重访车载点云位置不一致与点云绝对位置精度较低问题,通过粗细配准方法改善重访区域点云位置不一致问题,通过纠正控制点提高点云数据整体绝对位置精度,最后利用检验点验证纠正结果。
结果表明:纠正后的点云数据满足精度要求。
关键词:车载激光扫描;重访点云;点云纠正;精度改善1 引言激光扫描系统能够在高速移动状态下获取道路以及道路两侧建筑物、树木、交通标牌等地物表面的精确三维信息,具有数据采集速度快、自动化程度高、受天气影响小、数据内容丰富等传统测绘手段无可比拟的优势,对于提高测绘产品生产效率及自动化水平具有十分重要的作用。
车载扫描系统通过非接触的激光测距,高效获取道路环境的高精度三维信息,在城市道路资产管理、高精度地图、无人驾驶及农、林业中有重要应用,对获取全息道路信息具有重要意义。
然而,城市楼房林立、城市绿化度越来越高,移动测量车搭载的激光扫描仪在获取三维激光点云时,由于GNSS 信号遮挡,IMU 漂移误差积累严重,同一区域的重访点云存在显著的几何偏差,点云的绝对位置精度也会受到严重损失,大大影响了后续的语义信息提取与建模等实际应用,因此,研究车载点云位置一致性改善与数据质量改正十分必要[1]。
2 重访点云数据位置一致性改善2.1 实验数据采集与解算2.1.1车载数据采集车载激光扫描前的准备工作通常包括设计技术参数、测设基站、规划行车路线、系统测试,选择测区附近较为开阔的停车场,待设备安置完成后,开启系统设备,测试全景相机拍照效果,在软件中设置照片在平板电脑上的保存路径,初始化时检查平板中的GNSS、惯导,激光信号灯为绿色,GNSS 卫星数量不宜小于10颗,进行静止初始化,时长超过5分钟。
车载激光雷达测量技术及设计分析

车载激光雷达测量技术及设计分析摘要:车载激光雷达是一种重要的感知技术,广泛应用于自动驾驶和智能交通系统中。
本文对车载激光雷达的测量技术及设计进行了分析。
首先介绍了车载激光雷达的原理和工作方式,然后讨论了常见的测量技术,包括点云获取、目标检测和距离测量等。
接着,对车载激光雷达的设计要点进行了探讨,包括传感器的选择、布局和校准等。
最后,对未来车载激光雷达技术的发展趋势进行了展望。
关键词:车载激光雷达、测量技术、设计、自动驾驶、智能交通系统随着自动驾驶和智能交通系统的快速发展,车载激光雷达作为一种重要的感知技术,被广泛应用于车辆环境感知和障碍物检测中。
车载激光雷达通过发射激光束并测量其返回时间来获取环境中物体的位置和形状信息。
其高精度和快速测量的特点使得它成为自动驾驶系统中不可或缺的组成部分。
1车载激光雷达的原理和工作方式1.1激光发射和接收原理车载激光雷达是一种利用激光束进行测量的感知技术。
其原理是通过发射激光束并测量其返回时间来计算出距离和位置信息。
激光雷达通常采用固态激光器作为光源,发射窄束激光。
激光束经由旋转或扫描机构进行快速的水平和垂直扫描,覆盖整个周围环境。
当激光束遇到物体时,一部分光会被反射回来,并被接收器接收。
激光雷达的接收器通常采用光电二极管或光电倍增管来转换接收到的光信号为电信号。
接收到的信号经过放大和滤波处理后,被转换为数字信号供后续处理使用。
通过测量激光束从发射到接收的时间差,再结合光速常数,可以计算出物体与激光雷达的距离。
1.2信号处理和数据获取在车载激光雷达中,信号处理和数据获取是至关重要的步骤。
首先,接收到的模拟信号经过采样和量化转换为数字信号。
然后,对数字信号进行滤波和去噪处理,以消除干扰和提高信号质量。
接下来,通过对激光雷达的扫描数据进行解析和处理,可以获取环境中物体的位置、形状和运动信息。
在数据获取方面,车载激光雷达通常以点云的形式输出。
点云是由大量离散的点组成的三维空间数据集,每个点代表激光束与物体相交的位置。
车载移动测量系统前方交会中的误差分析
车载移动测量系统前方交会中的误差分析鹿星亮;刘庆元;侯凯宇【摘要】车载移动测量系统是由多个传感器集成的系统,定位精度受到很多因素的影响.首先简要介绍了车载摄影测量中内外方位元素的计算方法;其次,针对线性法前方交会求解中符号矩阵的直接求逆内存占用大的问题,提出利用杜利特尔分解(LU 分解)的方法,推导出了前方交会的解算公式;最后,针对短基线小交会角的情况利用误差传播定律分析了各误差源对最终定位结果的影响,对于进一步研究车载移动测量系统具有一定的参考意义.【期刊名称】《传感器世界》【年(卷),期】2017(023)002【总页数】5页(P29-33)【关键词】相机标定;前方交会;外方位元素;误差传播【作者】鹿星亮;刘庆元;侯凯宇【作者单位】中南大学地球科学与信息物理学院,湖南长沙410083;中南大学地球科学与信息物理学院,湖南长沙410083;中南大学地球科学与信息物理学院,湖南长沙410083【正文语种】中文【中图分类】P237一、引言随着导航定位技术、遥感技术以及传感器等技术的迅速发展,空间数据的获取能力得到了极大的提高。
李德仁院士指出:“车载移动测量系统作为测绘领域的一个新的发展方向,代表着未来道路地图测绘领域的发展主流。
”[1]车载移动测量系统(Mobile Mapping System,MMS)主要由GNSS接收机、惯性测量单元IMU、数码相机、激光扫描仪、里程计等传感器和车载计算机设备组成。
GPS、IMU和里程计采集的数据用来进行组合导航,获取系统每时刻的姿态和位置数据,得到高精度、高可靠性的车行轨迹。
激光扫描仪和数码相机用来获取目标地物的点云数据和影像数据,结合姿态数据融合生成带有绝对坐标的彩色点云数据。
MMS以GPS时间为主线,保证各传感器间的时间同步和协调,在车辆正常行驶状态下,快速采集道路及道路两旁地物的空间位置数据和属性数据。
MMS是由多传感器集成的系统,其关键技术主要有数据采集传感器的标定、各传感器间的机械集成和时间同步、传感器间的相对外方位元素的获取和高精度点云解算等,国内外许多专家和学者都对此都做了大量的研究工作。
点云数据获取与精度分析
2).测站设置。根据扫描实施方案,设置站点要保证三
维激光扫描仪在有效范围内发挥最大的作用,科学的 设置站点可大幅提高测量效率。需要扫描标靶的情况 下,换站前要计划好下站位置,确定下站也能看到标 靶;若不需要标靶,测站的位置要保证尽量多的看到 特征点,方便后续点云拼接。
测站设置一般遵守的原则: ①使得扫描仪所架设的各个测站可以扫描到目标区域的全
b.复杂建筑物建模观测控制网布设原则: ①观测控制网建设精度高于复杂建筑物模型要求精度
的一个等级。 ②控制网各控制点平面坐标采用高精度全站仪实施导 线测量,高程采用精密水准测量方法,并进行严格平 差计算。 ③控制网网形合适,满足三维激光扫描仪完整获取建 筑物数据的要求。对部分结构复杂的区域,应加密变 形监测控制点使扫描时能更好的获得扫描数据。 ④控制网中各相邻控制点间通视良好,要求一个控制 点至少与两个控制点通视。 ⑤为了提高测量精度,要求控制点与被测建筑物之间 的距离保持在50m以内或者更近的距离。
一个侧站上扫描的基本步骤为: a.仪器安置。对于集成度较高的扫描仪,仪器安置主
要工作包括电源(锂电池或者交流电源)、对中(在 需要条件下)、整平,这些操作需要的时间非常短。 对于扫描控制与数据存储采用笔记本电脑的分体式扫 描仪,需要将各个部件连接完整,就需要一定的时间 内,一般是半小时以内。 b.仪器参数设置。在确认仪器安置无误后,可以打开 仪器电源开关,一般开机可能需要几分钟时间。当开 机完成后,可以进行扫描参数设置,主要包括工程文 件名,文件存储位置,扫描范围,分辨率,标靶类型 等。其中与精度相关参数设置要与项目设计相符。
4).野外扫描方案设计 在整个项目技术设计中,野外扫描方案是最重要的组
成部分扫描之前要做全面仔细的方案设计。根据测量 场景大小、复杂程度和工程精度要求,确定扫描路线, 布置扫描站点,确定扫描站数及扫描系统至扫描场景 的距离,确定扫描分辨率。仪器参数的确定,将直接 影响到扫描精度和效率,分辨率一般根据扫描对象和 需要获取的空间信息进行确定。
车载移动测量系统激光扫描仪和线阵相机的检校技术研究

车载移动测量系统激光扫描仪和线阵相机的检校技术研究1. 本文概述随着科技的飞速发展,车载移动测量系统(VehicleBorne Mobile Mapping System, VMMS)在地理信息系统、智慧城市建设等领域发挥着越来越重要的作用。
激光扫描仪和线阵相机作为VMMS的核心组件,其精度和性能直接影响到整个系统的测量结果。
由于车辆振动、温度变化等多种因素的影响,这些设备在长时间使用后往往会出现偏差,因此对其进行精确的检校显得尤为重要。
本文旨在研究车载移动测量系统中激光扫描仪和线阵相机的检校技术。
将详细分析激光扫描仪和线阵相机的工作原理及其在VMMS 中的作用。
接着,本文将探讨目前常用的检校方法,包括实验室检校和现场检校,并分析这些方法的优缺点。
本文将重点研究一种新颖的集成检校方法,该方法结合了实验室检校的精确性和现场检校的实用性。
本文还将通过实验验证所提方法的有效性。
实验将在不同条件下进行,包括不同的道路类型、速度和温度等,以确保结果的准确性和可靠性。
本文将总结研究成果,并对车载移动测量系统中激光扫描仪和线阵相机检校技术的发展趋势进行展望。
通过本文的研究,期望能为车载移动测量系统的精确度和可靠性提升提供理论依据和技术支持。
2. 车载移动测量系统概述车载移动测量系统(Mobile Mapping Systems,简称MMS)是集成了激光扫描仪、线阵相机、惯性测量单元(IMU)、全球定位系统(GPS)以及里程计等多种传感器于一体的移动测量平台。
该系统通过搭载在车辆上,能够在行进过程中实现对道路及其周边环境的快速、高精度数据采集。
这些数据不仅包含空间三维坐标信息,还涵盖了颜色、纹理等丰富的视觉信息,为城市三维建模、道路检测、交通规划等领域提供了强有力的数据支撑。
激光扫描仪作为车载移动测量系统的核心设备之一,能够通过主动发射激光束并测量其反射时间来获取目标的精确三维坐标。
这种非接触式的测量方式不仅具有高精度、高速度的特点,还能在夜间或恶劣天气条件下稳定工作。
SSW车载移动测量系统及其应用
S S W车载移动测量系统及其应用刘先林*摘要:基于激光扫描仪的SSW车载移动测量系统由数据采集和点云数据处理两大模块构成。
本文详细介绍了系统的硬件构成、工作原理、关键技术,以及基于JX4-G硬件平台的点云数据处理系统(DY-2点云工作站)的基本功能,分析了系统的优势、应用领域。
展望了系统的应用前景和今后的研究方向。
关键词:激光扫描仪移动测量组合导航点云工作站一引言移动测量系统(Mobile Mapping System, MMS)是20 世纪90 年代兴起的一种快速、高效、无地面控制的测绘技术[1]。
最初人们利用摄影测量技术集成组合导航技术构建移动测量系统,实现地面移动摄影测量,获取目标地物的影像和空间信息数据。
由于地面摄影测量自身的局限性(视距变化大且短,同名点自动匹配困难等),系统所测数据精度较低,数据处理工作量大。
激光测距技术出现后,很快在测绘领域展开应用。
先后出现了激光测距仪和激光扫描仪。
新一代的移动测量系统就是将激光扫描仪、组合导航系统和CCD相机集成实现移动中直接获取目标物绝对坐标和纹理信息等数据的。
由于地面测量环境复杂,GPS信号经常失锁,集成车载激光扫描移动测量系统(以下简称移动测量系统)技术难度很大。
但其数据处理自动化程度高,数据结果直观,精度高。
SSW车载移动测量系统(以下简称SSW系统)(见图1)就是以激光扫描仪为主要传感器的新一代移动测量系统。
二 SSW系统结构与工作原理(一)系统结构*刘先林,中国工程院院士,研究员,博士生导师,中国测绘科学研究院名誉院长。
SSW系统由激光扫描仪、IMU、GPS、里程计、线阵相机、面阵相机、电动转台、供电和控制系统(笔记本电脑)、车载升降平台构成。
各模块通过机械结构集成为一体,以GPS时间为主线保证时间的同步和协调,通过相互间结构关系解求所测目标点绝对坐标。
图1. SSW车载移动测量系统车载升降平台和电动转台是系统搭建的基础平台。
车载平台由全顺车改装而成,在车子后半部分安装升降平台并在顶部开窗。
三维激光扫描仪和车载移动测量系统在工程测量中的应用分析
三维激光扫描仪和车载移动测量系统在工程测量中的应用分析摘要:科学技术的飞速发展,科学技术在建筑工程领域的运用,使建筑工程的发展速度有所提升,工程测量领域中运用三维激光扫描仪,获取目标测量数据,构成三维模型图像,提升了工程测量的效率。
而车载移动测量系统可以快速获取三维几何信息,全天候、无接触主动观测的优点,提升了工程测绘的速度。
本文分别对三维激光扫描技术和车载移动测量系统进行了案例分析。
关键词:三维激光扫描仪;车载移动测量系统;工程;应用前言:工程测量是个数据量繁杂的工作,以往都是人工测量,而在采集信息,整理归纳信息方便往往收施工环境、人员不齐的影响,无法实现数据的及时性、高效性。
现代科技的发展,为工程测量提供了便利,利用智能信息技术与合理的管理方法进行综合作业,对工程测量的效率有了很大程度的提升。
三维激光扫描技术利用了激光测距的原理,实现了数值的信息化,实现了点位测量和云图密度分析的目标。
车载移动测量利用了国际领先的导航地位技术,对测量目标精准定位、不影响施工,与航拍成本相比,费用低,测量速度快,通过获取激光点云数据,进行数据分析,以此为工程建设提供更准的资料信息。
1三维激光扫描仪的工作原理目前三维激光扫描技术有两种形式,固定式和移动式。
其中固定式操作流程为,选择测量站点位置,根据测量时间,进行点云数据汇总分析。
并且通过技术处理形成三维坐标,具有操作简单、高精度、范围广等优势。
该技术的移动式,主要是利用车载平台进行移动式定位扫描,利用GPS系统、IMU系统,同时结合该技术组成完整的运转系统,灵活性更高,数据采集范围广、速度快的特点。
该技术的主要核心工作原理为激光测距技术[1]。
扫描仪在运行工作时,对目标进行数据的反复采集和处理。
接收设备根据激光的强度测量出目标对象的距离值,进行颜色的灰度匹配。
从这个工作流程可以看出,扫描仪作为原点,定位测量过程形成了其他点位坐标,三点坐标的形成,对数据的采集与分析,提供了大量的信息。
车载移动立体测量系统检校及精度分析-激光与红外
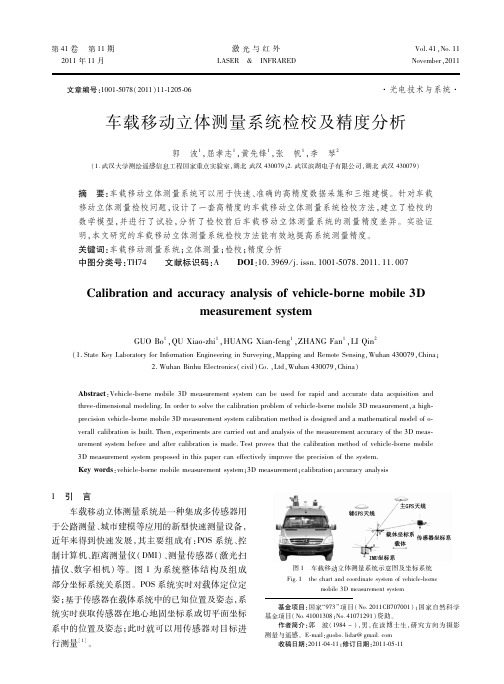
A b s t r a c t : V e h i c l e b o r n em o b i l e3 Dm e a s u r e m e n t s y s t e mc a nb eu s e df o rr a p i da n da c c u r a t ed a t aa c q u i s i t i o na n d , a h i g h t h r e e d i m e n s i o n a l m o d e l i n g . I no r d e r t o s o l v e t h e c a l i b r a t i o np r o b l e mo f v e h i c l e b o r n e m o b i l e 3 Dm e a s u r e m e n t p r e c i s i o nv e h i c l e b o r n e m o b i l e 3 Dm e a s u r e m e n t s y s t e mc a l i b r a t i o nm e t h o di s d e s i g n e da n da m a t h e m a t i c a l m o d e l o f o v e r a l l c a l i b r a t i o ni s b u i l t . T h e n , e x p e r i m e n t s a r e c a r r i e do u t a n da n a l y s i s o f t h e m e a s u r e m e n t a c c u r a c y o f t h e 3 Dm e a s u r e m e n t s y s t e mb e f o r ea n da f t e r c a l i b r a t i o ni s m a d e . T e s t p r o v e s t h a t t h ec a l i b r a t i o nm e t h o do f v e h i c l e b o r n em o b i l e 3 Dm e a s u r e m e n t s y s t e mp r o p o s e di nt h i s p a p e r c a ne f f e c t i v e l yi m p r o v et h ep r e c i s i o no f t h es y s t e m . K e yw o r d s : v e h i c l e b o r n em o b i l em e a s u r e m e n t s y s t e m ; 3 Dm e a s u r e m e n t ; c a l i b r a t i o n ; a c c u r a c ya n a l y s i s
GPS失锁状态下SSW车载激光建模测量系统的点云精度分析

GPS失锁状态下SSW车载激光建模测量系统的点云精度分析
GPS失锁状态下SSW车载激光建模测量系统的点云精度
分析
张要开1,李志2
【摘要】随着⾼精度动态定位技术、三维激光扫描技术以及⾃动控制技术的发展与融合,车载移动测量系统应运⽽⽣。
车载移动测量系统是通过GPS/IMU 组合导航来提供姿态信息,针对车载移动测量系统在外业数据采集过程中容易受到遮挡⽽使得系统GPS信号失锁,进⽽影响系统外业数据采集精度的情况。
⽂章通过采⽤SSW车载激光建模测量系统在室内环境下模拟GPS 信号失锁实验,然后对⽐真值与测量值,从⽽得出GPS失锁状态下SSW车载激光建模测量系统数据采集精度随时间的变化规律。
【期刊名称】《江苏科技信息》
【年(卷),期】2019(036)019
【总页数】4
【关键词】GPS失锁;SSW车载激光建模测量系统;GPS/IMU;精度分析
1 车载移动测量系统概述
随着信息技术的不断发展,城市信息化应⽤⽔平不断提升,智慧城市建设应运⽽⽣。
建设智慧城市在实现城市可持续发展、引领信息技术应⽤、提升城市综合竞争⼒等⽅⾯具有重要意义,因⽽近年来全国各地都在积极推进智慧城市建设。
建设智慧城市,⾸先就要获得城市的信息数据,若采⽤传统的测量⽅法作业(导线测量、碎部测量),不仅测量速度慢、精细度低、成本⾼,⽽且⽆法实现对场景信息的详细展⽰和三维可视化[1];对于移动测量系统,由于在数据采集时具有准确、快速、⾼效的特点以及采集的数据信息丰富(包括物体空间。
车载LIDAR技术误差分析与质量控制
车载LIDAR技术误差分析与质量控制任帅;张文君【摘要】为了使车载LIDAR技术的测图精度达到大比例尺基础测绘的质量标准,重点研究了该系统的误差成因及其对点云精度的影响,提出了一套完整的适用于大比例尺测图的车载LIDAR系统的误差控制方案.通过将1∶500数字线划图成果与全站仪检测数据进行对比,统计分析了车载LIDAR系统的测图精度,验证了该误差控制方案的可行性,突破了新技术应用于带状大比例尺地形图测绘的质量难题,缩短了外业工作时间、降低了成图周期,为建立车载LIDAR技术“高效率、全天候、小外业、大内业”的测图模式提供借鉴.%In order to make the measurement precision of vehicle LIDAR technology to meet the quality requirements of large-scale basic surveying and mapping,this paper analyzed the causes of the systematic error and its impact on the point cloud precision,thus putting forward a complete set of error control so lution for the vehicle LIDAR system applicable to large-scale surveying and mapping.By comparing the results of the 1∶500 digital line graphic (DLG) operation and the test dataof the electronic total station,the measurement precision of the vehicle LIDAR system was analyzed and the feasibility of the corresponding error control solution was verified.The new set of error control solution greatly helps the vehicle LIDAR technology to apply to the large-scale topographic surveying and mapping,therefore shortening the field working hours and reducing the mapping cycle.【期刊名称】《西南科技大学学报》【年(卷),期】2016(031)004【总页数】6页(P57-62)【关键词】车载LIDAR系统;点云;精度;误差来源【作者】任帅;张文君【作者单位】西南科技大学环境与资源学院四川绵阳621010;西南科技大学环境与资源学院四川绵阳621010【正文语种】中文【中图分类】P21;TN959.3车载LIDAR(light detection and ranging,LIDAR)技术是通过整合动态差分GPS、高精度惯导系统、激光测距仪、成像系统等新型测绘技术于移动载体上,快速采集道路和周边地物的点云与像片的测量系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l s s 0 ,i fo —i 1 rs ] p n c p sn s c 0 i 0P n P s 0 l
() 1
设 激光 在某 时刻 位置 为 P ( ,。 ) 绕 X、 、 。 。Y , , Y
m ns 修 正 I e t) MU姿 态 漂移 , 同 组 成 P S P sin 共 O ( oio t
a dO i t i yt 系 统 , 确 定 系 统 的轨 迹 和 n r na o Ss m) e tn e 来 任意 时刻 的位 置 ;6 。 光扫 描仪 获取 三维 信 息 ; 30激 面 阵 C D相 机 获 取 纹 理 信 息 。该 系 统 由 G S C N S向 激
1 系统 的 定 位 原 理
车 载激 光 移 动 建 模 测 量 系 统 由 G S ( l a N S Go l b
N vgt nS t leS s m) 供 系 统 的 位 置 信 息 、 ai i a lt yt ao e i e 提 I U(n ra MesrmetU i) 供 系 统 的姿 态 和 M Iet l aue n nt 提 i 姿 态 加 速 度 信 息 、 MI D s n e Mesr g Is u D ( ia c aui nt — t n r
() 1 数据 外 业采 集 。将 G S N S基 站 架 设 于 已 知
・
维信息获取及其精度分析工 作。
53 ・
21 02年第 6 期 中来自州煤 炭 总第 18 9 期
的控 制点 上 , 证解 算 的点 云坐 标 与 全 站仪 坐 标 为 保 统一 坐标 系 。在测 区附 近寻找开 阔区域进 行 系统 静 态初 始化 , 该系统静 态初 始化后 , 以保证 在数 据采 可 集过 程 中系统 运行 不 受 道路 交 通 的影 响 , 即使 长 时 间停 车仍 然 能 保 证 P S系 统 的 高 精 度 。静 态 初 始 O 化结 束后 开启 激光 扫 描 仪进 行 数 据采 集 , 车辆 运 行 速度 可 以根据 要求 在 0~8 m h之 间选 择 。数 据 0k / 采集 结束 后选 择一 开阔 区域进行 系统 静态 结束化 。
车载 激光 移动建 模测 量系 统与传 统 的测量 作业 方式 相 比 , 具有 以下 特点 : 精度 高 , 以达 到厘米 级 ; 可 速度 快 , 车辆可 按照 0~8 m h的 速 度 获取 数 据 ; 0k / 数据 产生周 期 短 ; 自动化程 度高 , 整个 数据 采集 过程 只需 要少 量 的人 工干 预 ; 天气 影 响小 , 受 白天黑 夜均 可作 业 ; 险性 小 , 据 采集 时作 业 人 员都 在 车 内 ; 危 数 信息 量大 , 不仅 可 以获取路 面 、 路灯 、 树木 、 井盖 等三 维信 息 , 且还 可 以获取 高度 、 而 纹理等 信 息 。因而该
口
() a P () b
图 1 激 光位 置 以 及激 光 与 竖直 方 向方 位 角
收 期:0 —3 0 稿日 2 2 0 —1 1
作者简介 : 鲁 勇 (9 1 ) 男 , 1 8 一 , 山东 日照 人 , 士 研究 生 , 从 事 三 硕 现
2 数 据 采集 及 处 理
2 1 年第 6 02 期
中 州煤 炭
总第 18 9 期
车 载 激 光 移 动 建 模 测 量 系统 点 云 精 度 检 核 与 误 差 来 源 分 析
鲁 勇 王 留召 郭 姣 赵 坤 , , ,
( . 都 师 范 大学 , 1首 北京 1 0 4 ; . 国测 绘 科 学研 究 院 , 京 1 0 3 ) 008 2 中 北 0 09
高程 的影 响 。要 想 获 取 更 高 精 度 的三 维 点 云 信 息 , 要进 行 优 化和 检 校 。 需 关 键 词 : 载 激 光 移 动建 模 测 量 系 统 ; 度 检 核 ; 差 来 源 ; 云 车 精 误 点
中图 分 类 号 : 2 8 4 P 2 .3 文 献 标 志 码 : B 文 章 编 号 :0 3— 5 6 2 1 ) 6— 0 3— 3 10 0 0 (0 2 0 0 5 0
般测 量误 差分 析方 法 , 据 系 统测 量 原 理 构 建误 差 依 方程 , 析得 到点云精 度 的主要 影 响因子 。 分
Z轴旋 转 的 3个姿 态 角分别 为 y rp 图 1 a ) 激 、 ,( () ,
光与 Z轴 ( 竖直 向上 ) 的方 位 角 为 0 图 1 b ) 激 ( ( ) , Y ) 根据 式 ( ) 以得 到 P点坐标 。 , , 1可
系 统 受 到 越 来 越 广 泛 的关 注 。
×
获取任 意一 时刻 的位 置 、 姿态 信 息 以及 相关 的激 光
扫描角 、 离等信 息 , 距 由式 ( ) 算 任意 一 点 的三 维 1计
车 载激 光 移 动建 模测 量 系 统数 据 量 大 , 测量 密 度高 , 以点云 的形式 表现 。 因此 , 云精 度直接 反 映 点
摘 要 : 高 车 载 激 光 移 动 建模 测 量 系 统 点 云 精度 , 要 了解 点 云 精 度 的误 差 来 源 。使 用 传 统 方 式 获 取 特 征 点 提 需 高精 度 三维 坐 标 作 为 点 云 真 值 , 后 与 点云 中相 应 的特 征 点 坐标 进 行 比 较得 到 点 云精 度 , 而 结 合 点 云 数 据 然 从 获 取 原 理 及 过 程 进 行 误 差 来 源 分 析 。 分 析 了在 2个 典 型 场 地 进 行 的 精 度 验 证 , 为 车 载 激 光 移 动 建 模 测 量 认 系统 存 在 一定 的误 差 , 要 对 数 据 执行 后处 理 , 能 满 足 要 求 , 车 辆 行 驶 速 度 对 平 面 的 影 响 要 远 远 大 于 对 需 才 且