超分辨处理理论基础
光学中的超分辨成像技术
光学中的超分辨成像技术超分辨成像技术是目前光学领域的一个热门话题。
光学成像是一种通过光学系统来获取目标物体信息的技术,而超分辨成像技术则是要在前者的基础上,提高成像质量,实现更加细节化的成像结果。
本文将结合理论和实践,对光学中的超分辨成像技术进行深入探讨。
一、超分辨成像技术的理论基础超分辨成像技术的核心在于一种叫做衍射极限的理论。
这个理论认为,在成像中,一个物体在图像中的最小分辨率受到了光波传播的限制,这个极限被称为衍射极限。
达到这个极限,我们才会得到正真意义上的清晰可见的图像。
而在衍射极限外的物体,则会被模糊掉,无法分辨。
为了突破这个限制,科学家们想到了各种办法。
其中主要的两种方法分别是超分辨率显微镜和衍射限制解析成像技术。
二、超分辨率显微镜超分辨率显微镜的发展是在1950年代初期,由Ernst Abbe首先提出的折射率为1.5-1.6的物质是作为透镜的极限。
这一发现将光学成像的空间分辨率极限确定为半波长大小(0.2μm的蛋白质、20-30nm的细胞分子等)。
在此之前的研究中,传统光学显微镜是无法观察到这样小的物体的。
所以人们想到了一些更微小的物体来作为显微镜,例如透射电镜,扫描电子显微镜等。
但是这些显微镜对进行成像的样品要求比较高,而透射电镜还会对样品造成伤害。
因此,人们开始研究超分辨率显微镜。
其中最早的一种是激光荧光显微镜(STED)。
激光荧光显微镜通过对样品进行扫描,然后让样品中的某一部分发光,并快速扫描激光束,从而得到图像。
但是传统荧光信号上的光子数量受到依赖荧光剂分子数目、照射光强度、模糊滤波器和探测器响应等多种因素的影响而受到限制。
为此,科学家通过选择特定波长的激光光束,并在中心光束周围加上一个形状特定的控制激励光束,进一步减小了荧光信号的尺寸。
STED显微镜与传统荧光显微镜相比,具有更高的空间分辨率和更高的信噪比,这意味着它可以获得更清晰的图像,并且可以获得对光学分辨率的一种比较好的突破。
计算机视觉中的图像超分辨率技术研究
计算机视觉中的图像超分辨率技术研究随着科技的飞速发展,计算机视觉技术越来越成熟,其中的图像超分辨率技术更是备受瞩目。
图像超分辨率技术是一种可以提高图像质量的技术,它可以将低分辨率图像转化成高分辨率图像,并且保持图像的细节和清晰度。
在实际应用中,这项技术可以被用于医学影像、卫星图像、电视广播以及监控系统等众多领域。
一、图像超分辨率技术原理图像超分辨率技术主要分为两类:插值法和重建法。
插值法是通过对像素进行计算的方法来得到高分辨率图像,这种方法最早在数字图像处理中被使用。
而重建法则是一种基于图像统计学的方法,它可以通过对图像进行数学模型的建立和优化来实现超分辨率效果。
在图像超分辨率技术中,最常用的算法是基于图像本身的优化方法。
这种方法需要通过一系列公式和算法来优化图像,从而得到更清晰和更精细的图像。
另外,还有一些基于深度学习的图像超分辨率算法,这种方法通常需要使用大量的数据来进行训练,并且它可以更好地保证图像的真实性和可靠性。
二、图像超分辨率技术的应用图像超分辨率技术在生活中的应用十分广泛。
比如在医学影像领域中,医生需要对病人的影像进行准确的诊断,而低分辨率影像可能会降低图像的质量,从而影响到医生的判断。
图像超分辨率技术可以将低分辨率影像转化为高分辨率影像,为医生提供更全面和准确的诊断。
同样的,在卫星图像、电视广播和监控系统等领域中,图像超分辨率技术也发挥着重要的作用。
三、图像超分辨率技术面临的挑战虽然图像超分辨率技术已经取得了较大的进展,但是仍面临一些挑战。
首先,由于图像超分辨率技术需要进行大量的计算和算法优化,因此需要具备足够的计算能力和存储资源。
其次,图像超分辨率技术需要使用大量的数据进行训练,然而此类数据的获取和处理难度很大。
最后,不同的应用场景对图像超分辨率技术的要求不同,因此需要针对不同的应用场景进行技术优化和适配。
四、结语近年来,图像超分辨率技术得到了较大的发展,它为我们提供了更清晰、更精细的图像。
超分辨率图像处理技术的研究

超分辨率图像处理技术的研究近年来,随着人工智能和计算机技术的不断发展,超分辨率图像处理技术已经越来越成熟。
它可以将低分辨率图像转化成高分辨率图像,提高图像的质量和清晰度。
这种技术对图像处理、视频监控、医学图像等领域都有着重要的应用。
一、超分辨率图像处理技术的基本原理所谓超分辨率技术,就是通过对低分辨率图像进行处理,重新构建出高分辨率图像的过程。
这个过程包含两个重要的环节:超分辨率重建算法和图像采集技术。
其中,超分辨率重建算法是核心部分,它通过数学模型和算法实现低分辨率图像到高分辨率图像的转化。
超分辨率重建算法主要有基于插值、基于优化、基于图像降噪等多种类型。
其中,基于插值的算法是最为常见的一种。
这种算法通过对图像进行像素插值,达到提升分辨率的目的。
相应地,基于优化的算法则是通过求解约束优化问题,找到最优的高分辨率图像。
最后,基于图像降噪的算法主要依赖于图像去噪技术,去除图像中的噪声干扰,从而获得高质量的超分辨率图像。
图像采集技术是超分辨率技术的另一个关键部分。
目前,常见的图像采集技术包括超分辨率成像系统、高速摄像机、双目/多目系统等。
这些技术主要依赖于高精度的光学记录和数码处理,从而提高图像的清晰度和准确性。
二、超分辨率图像处理技术的应用超分辨率图像处理技术的应用非常广泛,涵盖了很多领域。
目前,它已经在图像处理、视频监控、医学图像、卫星图像等方面得到了广泛的应用。
1. 景观照片修复景观照片修复是一种常见的图像处理技术。
通过利用超分辨率技术,可以将模糊或者低分辨率的景观照片转化成高分辨率的高清图片,进而实现照片的修复和重现。
2. 视频监控超分辨率技术在视频监控领域中也发挥着重要作用。
通过应用这种技术,可以将低分辨率的监控视频转化为高分辨率的画面,达到进一步审查视频内容和追踪犯罪的效果。
3. 医学图像医学领域的图像处理是超分辨率技术的另一个重要应用方向。
医学图像的高质量和准确性对于医生的诊断具有非常重要的意义。
利用稀疏表示方法对图像进行去雾超分辨
摘要摘要随着科技的不断进步,人们进入了信息时代。
数字图像作为一种信息传播的重要形式,其分辨率的高低以及一些浑浊的介质会影响人们获取图像中的信息。
在现实世界中,有非常多的因素会影响图像的分辨率,如快门、散弹噪声、抖动、衍射极限、传感器、聚焦、颜色混叠等。
在物体成像中也存在着很多浑浊的介质,如水滴、颗粒、烟雾等。
这些因素和介质都会导致图像的分辨率降低,以及图像中的部分信息丢失,因此,提高图像的分辨率和去除图像中的雾就显得尤为重要。
当成像设备与成像环境均不够完善时,采用数学算法提高图像质量,即利用稀疏表示方法对图像进行去雾超分辨,这样做的优点是既不受硬件设备和环境条件的限制,还能使成本降低,具有广阔的应用前景。
稀疏表示理论在图像处理方面的应用备受关注,如图像去噪、人脸识别、图像超分辨率重建等。
通过训练字典可以将图像补丁稀疏表示,再用最少的原子代表图像补丁,准确获取图像的纹理特征信息。
本文的创新点在于利用稀疏表示方法对图像进行超分辨的同时又加入了对图像去雾的研究,得出的图片效果要好于单独去雾和单独超分辨的图像。
本文主要研究内容如下:1.利用超完备字典中适当选择的元素稀疏线性组合表示图像补丁。
由此为每个输入的低分辨率补丁都找到相对应的稀疏系数,通过该系数得出高分辨率输出。
2.高、低分辨率图像补丁的联合训练,可以加强高、低分辨率图像补丁对间稀疏表示的相似性。
因此,低分辨率图像补丁的稀疏表示能够与高分辨率图像补丁字典一起应用,生成高分辨率的图像补丁。
3.在利用稀疏表示方法对图像进行超分辨率重建的过程中,其求解是一个不适定问题,为了进一步提高图像的重建质量,在重建过程中引入了正则化约束。
4.在广泛了解现有的图像去雾的方法后,决定将暗通道先验模型这种去雾算法和稀疏表示的图像去雾算法相结合。
此方法使用暗通道先验模型来去掉图像中的雾,使用稀疏表示方法去掉图像中的细节噪声,提高图像分辨率。
相对以往的暗通道先验模型来说,此方法的去雾霾效果稍好一些,保真度也稍好一些。
超分辨测向理论及其性能优化技术
超分辨测向理论及其性能优化技术超分辨测向理论及其性能优化技术超分辨测向(Super-Resolution,简称SR)是一种图像处理技术,它可以将低分辨率的图像转换成高分辨率的图像,从而提高图像的质量。
超分辨测向理论是一种有效的图像处理技术,它可以有效地提高图像的分辨率,从而提高图像的质量。
超分辨测向理论的基本原理是,通过分析低分辨率图像中的细节,恢复出高分辨率图像中的细节,从而提高图像的质量。
超分辨测向理论的核心思想是,通过分析低分辨率图像中的细节,恢复出高分辨率图像中的细节,从而提高图像的质量。
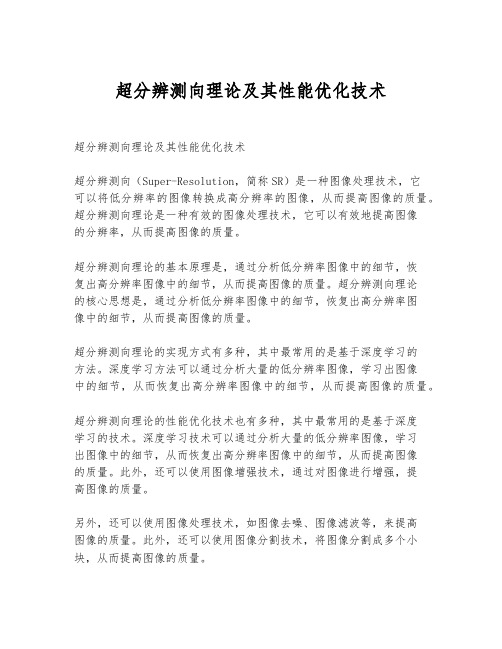
超分辨测向理论的实现方式有多种,其中最常用的是基于深度学习的方法。
深度学习方法可以通过分析大量的低分辨率图像,学习出图像中的细节,从而恢复出高分辨率图像中的细节,从而提高图像的质量。
超分辨测向理论的性能优化技术也有多种,其中最常用的是基于深度学习的技术。
深度学习技术可以通过分析大量的低分辨率图像,学习出图像中的细节,从而恢复出高分辨率图像中的细节,从而提高图像的质量。
此外,还可以使用图像增强技术,通过对图像进行增强,提高图像的质量。
另外,还可以使用图像处理技术,如图像去噪、图像滤波等,来提高图像的质量。
此外,还可以使用图像分割技术,将图像分割成多个小块,从而提高图像的质量。
总之,超分辨测向理论是一种有效的图像处理技术,它可以有效地提高图像的分辨率,从而提高图像的质量。
此外,还可以使用多种性能优化技术,如深度学习技术、图像增强技术、图像处理技术和图像分割技术,来提高图像的质量。
因此,超分辨测向理论是一种有效的图像处理技术,可以有效地提高图像的质量。
超分算法原理
超分算法原理Super-resolution algorithm is a technique used in digital image processing to enhance the resolution of an image beyond its original quality.超分辨率算法是数字图像处理中的一种技术,用于提高图像的分辨率,使其超出原始质量。
One of the primary principles behind super-resolution algorithms is to use information from multiple low-resolution images to construct a single high-resolution image.超分辨率算法的主要原理之一是利用多个低分辨率图像的信息构建单个高分辨率图像。
By combining the finer details from different low-resolution images, the super-resolution algorithm is able to produce an image with enhanced sharpness and clarity.通过合并不同低分辨率图像中的细节,超分辨率算法能够产生具有增强锐度和清晰度的图像。
There are various approaches to implementing super-resolution algorithms, including interpolation-based methods, reconstruction-based methods, and learning-based methods.实现超分辨率算法的方法有很多种,包括基于插值的方法、基于重建的方法以及基于学习的方法。
Interpolation-based methods involve using mathematical techniques to estimate the missing high-frequency information in a low-resolution image.基于插值的方法涉及使用数学技术来估计低分辨率图像中丢失的高频信息。
超分辨定位成像原理
超分辨定位成像原理超分辨定位成像原理是指通过对局部图像细节进行重建,提高图像分辨率和定位精度的一种成像技术。
该技术被广泛应用于生物医学、材料科学、纳米技术、半导体制造等领域。
本文将详细介绍超分辨定位成像原理的实现方法和原理。
一、超分辨技术综述随着现代科技的飞速发展,人们对图像清晰度和定位精度的需求越来越高。
由于物理学的限制或技术设备的限制,一些细小局部特征不能被清晰地观测和定位。
超分辨成像技术就是为了解决这个问题而产生的。
这项技术最早于20世纪60年代提出,但是由于技术手段的局限性,很长时间内都无法实现。
随着计算机技术和光学技术的不断发展,近年来,超分辨成像技术得到了长足的进展。
目前主要的超分辨成像技术包括局部反演技术、结构光技术、全息技术、点扫描技术和单分子成像技术等。
超分辨定位成像技术是一种通过对图像局部信息进行数学处理和运算,从而提高图像清晰度和定位精度的技术。
超分辨定位成像原理是基于荧光光学的原理实现的。
当样品被激发后,会发射出一些贡献于图像的单光子,这些单光子经过透镜聚焦之后,最后经过光电探测器探测,形成图像。
正常情况下,只能观测到可见光范围内的波长,其他波长的信息则无法被观测到。
超分辨定位成像技术通过对荧光分子的发光信息进行特殊处理,获取了波长以外的额外信息,从而提高了图像的分辨率和定位精度。
具体来讲,其实现过程可以分为光学与数据处理两个过程。
光学部分:图像采集的过程中,样品中的发光分子会发出光子,这些光子会被探测器探测到,最终形成图像。
光子的位置可以通过对探测器接收到的光信号进行位置测量(离子感应采集器或 EMCCD 等),但是受限于探测器的分辨率,光子的位置精度有限。
事实上,通过合理的光学设计和探测器参数的把握,可以获得极高的信噪比。
数据处理部分:对于超分辨图像处理,可以采用不同的算法,最常用的算法当属AST和HSLL。
其中AST主要是假设所有的荧光分子都是独立发光的,而HSLL则是过滤掉互相影响的噪音,从而保留信号信息。
图像超分辨
15x15 windows
利用阶跃边缘估计模糊核
求导
阶跃函数
冲击函数
利用阶跃边缘估计模糊核
(a) 理想阶跃边缘(上) (b) 理想边缘梯度(上) (c) 理想梯度剖面(上) 模糊梯度剖面(下) 模糊阶跃边缘(下) 模糊边缘梯度(下)
阶跃边缘梯度 剖面与模糊核 关系:
x2 1 k( x) exp 2 2 2
Lukosz 提出序列超分辨:
Lukosz W. Optical systems with resolving powers exceeding the classical limit[J]. JOSA, 1966, 56(11): 1463-1471.
通过提高成像 时间分辨率 来换 取成像 空间分辨率 的提高。
传统光流法无法直接应用于超分辨场合
(c)真实光流场
(d) 传统光流结果
(e) 本文方法
光流法失效原因分析
问题1:混叠破坏了传统光强不变假设
解决:“coarse-to-fine”的迭代优化策略
光流法失效原因分析
问题2:光强不变假设成立,光流求解的稳定性
“光强不变”假设: 光流方程:
I1 ( p) I 2 ( p d )
M yt Wm,t DFm z nt m1
概率运动场的基本思想:
Huber范数混合型范数 概率运动场, 即假定图像中的一个像素可以有多种运动的可能,同时给出 (hybrid L1/L2)
这些运动的可能性大小(权重),增加 冗余性 换取鲁棒性。
重建鲁棒性提升
基于概率运动场的超分辨最大似然解:
在稳健统计理论中,基于最大似然估计思想的一类方法被称为 M估计。 测度函数的选择: L2-范数: 对应最小二乘解,在高斯分布下为最优解
超分辨率成像技术的研究及应用
超分辨率成像技术的研究及应用随着科技的不断发展,越来越多的领域开始涉足到超分辨率成像技术的研究和应用中。
这项技术的特点是通过使用一系列算法和工具来提高图像的分辨率,进而获得更加清晰的图像。
本文将探讨这项技术的原理、应用和未来展望。
一、超分辨率成像技术的原理超分辨率成像技术的原理是基于在一组低分辨率图像中通过最小化像素之间的差异来恢复高分辨率图像的基本思想。
应用超分辨率成像技术所需的数据包含低分辨率成像器采集到的图像以及高分辨率成像器所表现出的对象信息。
这些数据通过复杂的算法和技术进行处理和融合,从而得到更加清晰的高分辨率图像。
超分辨率成像技术的原理还包括以下三个方面:1.超分辨率成像的线性模型:对于一幅标准分辨率图像,其高分辨率姐妹图像的像素值可以通过多个低分辨率成像器的图像进行线性约束求解得到。
2.超分辨率成像的非线性模型:在非线性模型中,不同描述变量之间的关系取决于在低分辨率模式下所观测得到的不同特性。
3.超分辨率成像的训练模型:训练模型通常采用梯度下降、纯粹性约束方法和离散余弦变换模型等进行训练,以优化低分辨率和高分辨率之间的转换。
二、超分辨率成像技术的应用超分辨率成像技术可以应用于多个领域,对于科学研究和工程技术都有着很重要的作用。
以下是一些重要的应用领域:1.医学领域:超分辨率成像技术可以用于医学图像的再生和修复,特别是对于放射性医学成像利用多普勒成像技术可以提高图像分辨率。
2.地质领域:通过超分辨率成像技术可以提高地面卫星图像的分辨率和精度,进而为地质灾害预测和环境监测等提供重要的数据和指导。
3.安全领域:超分辨率成像技术可以用于智能监控和安全检测中,提高摄像机的缩小显示屏幕的图像分辨率和清晰度,更为精准的检测出安全隐患。
4.航空航天领域:通过超分辨率成像技术可以优化遥感图像的质量和精度,进而在航空航天领域的多个细分领域(如卫星导航、地球物理勘探等)发挥更加重要的作用。
三、超分辨率成像技术的未来展望超分辨率成像技术的未来前景十分广阔,在计算传感器网络、医疗保健、信息安全、娱乐等多个领域都有不可替代的作用。
超分辨率
图像超分辨率重建技术就是利用一组低质量、低分辨率图像(或运动序列)来产生单幅高质量、高分辨率图像。
图像超分辨率重建应用领域及其宽广,在军事,医学,公共安全,计算机视觉等方面都存在着重要的应用前景。
在计算机视觉领域,图像超分辨率重建技术有可能使图像实现从检出水平(detection level)向识别水平(recognition level)的转化,或更进一步实现向细辨水平(identification level)的转化。
图像超分辨率重建技术可以提高图像的识别能力和识别精度。
图像超分辨率重建技术可以实现目标物的专注分析,从而可以获取感兴趣区域更高空间分辨率的图像,而不必直接采用数据量巨大的高空间分辨率图像的配置。
目前超分辨率技术主要有以下两大类:基于重建的方法、基于学习的方法。
1、基于重建的超分辨率技术:基于重建的超分辨率方法的基础是均衡及非均衡采样定理。
它假设低分辨率的输入采样信号(图像) 能很好地预估出原始的高分辨率信号(图像)。
绝大多数超分辨率算法都属于这一类,其中主要包括频域法和空域法。
频率域方法是图像超分辨率重建中一类重要方法,其中最主要的是消混叠重建方法。
消混叠重建方法是通过解混叠而改善图像的空间分辨率实现超分辨率复原,最早的研究工作是由Tsai 和Huang在1984 年进行的。
在原始场景信号带宽有限的假设下,利用离散傅立叶变换和连续傅立叶变换之间的平移、混叠性质,给出了一个由一系列欠采样观察图像数据复原高分辨率图像的公式。
多幅观察图像经混频而得到的离散傅立叶变换系数与未知场景的连续傅立叶变换系数以方程组的形式联系起来,方程组的解就是原始图像的频率域系数,再对频率域系数进行傅立叶逆变换就可以实现原始图像的准确复原。
在空域类方法中,其线性空域观测模型涉及全局和局部运动、光学模糊、帧内运动模糊、空间可变点扩散函数、非理想采样等内容。
空域方法具有很强的包含空域先验约束的能力,主要包括非均匀空间样本内插、迭代反投影方法、凸集投影法、最大后验概率以及混合MAP/ POCS 方法、最优和自适应滤波方法、确定性重建方法等。
光学工程中超分辨成像技术的研究与应用
光学工程中超分辨成像技术的研究与应用在今天科学技术日新月异的时代,光学成像技术更是朝着高清晰度、高精确度、高速度的方向不断发展,而超分辨成像技术作为光学成像技术的高端产品,一直备受科学家和工程师的重视和研究。
本文将从基本原理到应用实践,全面介绍超分辨成像技术的研究和应用。
一、超分辨成像技术的基本原理超分辨成像技术是指利用一些特殊的成像原理或者技术手段,将物体的微小细节信息呈现出来,从而达到超越传统光学分辨极限的图像清晰度和精确度。
在光学领域,超分辨成像技术最核心的原理就是“突破衍射极限”。
1. 衍射极限的基本概念在光学领域,衍射极限是指在理想条件下,可分辨两个形态不同但空间位置非常近的物体时,两者之间的最小距离,也叫做“最小可分辨距离”。
在底片放大成像时,这个距离通常被表示为空间频率(即一个典型的线数/mm)。
根据基本物理原理,可分辨距离的最小值约等于半个光波长。
2. 突破衍射极限的方法为了实现超越传统光学分辨极限的图像清晰度和精确度,科学家和工程师们通过各种手段来突破衍射极限,如:(1)双光子激发显微术(TPM):这种技术是基于二次激光的原理,通过激发样本的荧光信号,在三维空间内重建出样本的一个高分辨率的图像。
(2)双片方法:双片方法利用一种迭代算法来分析和优化成像系统中的点扩散函数,从而超越传统光学分辨极限。
这种方法通常需要校准成像系统的点扩散函数,因此对计算机和软件的要求比较高。
(3)固体光学自旋陀螺磁共振成像(SOLID):这种技术结合了光学和磁共振成像的优点,可以在超过传统光学分辨极限的情况下对样品进行高精度成像。
(4)单分子荧光成像:这种方法可以实现单个分子的成像,可以用来研究生物分子之间的相互作用和位置关系。
二、超分辨成像技术的应用实践超分辨成像技术在生物学、材料科学、化学等领域有着广泛的应用,可以为研究者提供更加全面、高清晰的实验数据和结果。
下面将介绍超分辨成像技术在这些领域的应用实践。
超分辨率算法综述

图像超分辨率算法综述摘要:介绍了图像超分辨率算法的概念和来源,通过回顾插值、重建和学习这3个层面的超分辨率算法,对图像超分辨率的方法进行了分类对比,着重讨论了各算法在还原质量、通用能力等方面所存在的问题,并对未来超分辨率技术的发展作了一些展望。
关键词:图像超分辨率;插值;重建;学习;Abstract:This paper introduced the conception and origin of image super resolu- tion technology. By reviewing these three kinds of methods(interpolation,reconstruct, study), it contrasted and classified the methods of image super-resolution,and at last, some perspectives of super-resolution are given.Key words: image super-resolution;interpolation;reconstruct;study;1 引言1.1 超分辨率的概念图像超分辨率率(super resolution,SR)是指由一幅低分辨率图像(low resolution,LR)或图像序列恢复出高分辨率图像(high resolution,HR)。
HR意味着图像具有高像素密度,可以提供更多的细节,这些细节往往在应用中起到关键作用。
要获得高分辨率图像,最直接的办法是采用高分辨率图像传感器,但由于传感器和光学器件制造工艺和成本的限制[1],在很多场合和大规模部署中很难实现。
因此,利用现有的设备,通过超分辨率技术获取HR图像(参见图1)具有重要的现实意义。
图1 图像超分辨率示意图图像超分辨率技术分为超分辨率复原和超分辨率重建,许多文献中没有严格地区分这两个概念,甚至有许多文献中把超分辨率图像重建和超分辨率图像复原的概念等同起来,严格意义上讲二者是有本质区别的,超分辨率图像重建和超分辨率图像复原有一个共同点,就是把在获取图像时丢失或降低的高频信息恢复出来。
使用超分辨率技术改善数字图像的细节和精度

使用超分辨率技术改善数字图像的细节和精度随着数字图像处理技术的日益发展和普及,我们对于数字图像的要求也越来越高,例如图像清晰度、细节再现、色彩还原等等。
而数字图像的分辨率则是影响图像质量的重要因素之一。
本文将重点介绍一项提高数字图像分辨率的技术——超分辨率技术,并探讨其在提高数字图像细节和精度方面的应用。
一、超分辨率技术的原理及分类超分辨率技术,顾名思义,是指通过一些算法和技术手段,将低分辨率图像转换成高分辨率图像的过程。
其核心思想是通过一系列的图像处理方法,预测并生成高分辨率图像的数据,从而提高整个图像的观感和细节还原。
目前,超分辨率技术主要可以分为两类:基于重建的超分辨率技术和基于学习的超分辨率技术。
基于重建的超分辨率技术主要是利用图像插值的方法进行处理,通过插值得到新的像素值来增加图像的分辨率。
这类技术需要参照原始图像的高频信息进行重建,比较经典的方法有双三次插值法、最近邻插值法等。
基于学习的超分辨率技术则是利用机器学习的方法进行处理,通过训练算法模型,以学习低分辨率图像和高分辨率图像之间的映射关系,把低分辨率图像映射为高分辨率图像。
这类技术有很多变种,包括K-SVD、SRGAN、SRCNN等。
二、超分辨率技术在数字图像处理中的应用超分辨率技术的应用非常广泛,尤其在数字图像处理中,可谓是一匹黑马。
主要有以下几个方面:1、图像放大方面:在数字图像处理中,需要将某些低分辨率的图像进行放大,以便更好地观察和分析。
而超分辨率技术可以在不损失信息的情况下,通过算法对图像进行重建和插值,从而提高放大后图像的清晰度和细节还原。
2、视频修复方面:长时间使用的摄像头可能会出现一些问题,例如散粉、浮点、暗区、亮区等,这些问题会影响到视频的质量。
而借助超分辨率技术,我们可以通过算法技术手段去除这些影响,提高视频质量的同时,也可以增加细节的还原。
3、遥感图像处理方面:遥感图像在传输过程中存在各种影响,例如信噪比低、失真等问题,这些问题会影响到遥感图像分析的结果。
超分辨 omp算法
超分辨omp算法全文共四篇示例,供读者参考第一篇示例:超分辨率(超分辨率)是指一种通过利用多个低分辨率图像或视频帧生成高分辨率图像或视频帧的技术。
这在计算机视觉、图像处理和视频处理中具有广泛的应用,例如提高图像和视频质量、增强细节和纹理等。
omp(Orthogonal Matching Pursuit,正交匹配追踪)算法是一种经典的超分辨算法,能够在较短的时间内生成高质量的超分辨图像。
omp算法是一种使用贪心方法的迭代算法,以迭代逼近原始信号的稀疏表示。
其基本思想是在每一次迭代中,通过匹配当前残差与字典中原子的投影,选择一个最匹配的原子来更新估计的稀疏表示。
通过不断迭代这一过程,最终得到与原信号最接近的稀疏表示,进而重构出高质量的超分辨图像。
与其他超分辨算法相比,omp算法具有以下优点:omp算法的迭代过程简单快速,可以在较短的时间内生成高质量的超分辨图像。
omp算法基于稀疏表示的假设,能够有效地捕捉图像和视频的稀疏结构,从而提高超分辨效果。
omp算法易于实现和调整,可以根据不同的需求和场景进行优化。
虽然omp算法在超分辨领域取得了很好的效果,但也存在一些挑战和限制。
在处理大规模图像和视频数据时,omp算法的计算复杂度较高,需要大量的计算资源和时间。
omp算法对字典的选择和稀疏表示的初始化比较敏感,需要合适的设置才能达到最佳效果。
omp算法在处理非线性和复杂图像结构时效果有限,需要结合其他算法进行优化。
第二篇示例:超分辨率( Super-resolution) 是一种通过使用计算机算法来提高图像或视频的空间分辨率的技术。
在图像处理领域,超分辨率算法主要是通过结合多个低分辨率图像来生成一个高分辨率图像,从而实现提高图像质量的目的。
在图像处理和计算机视觉领域,超分辨率算法被广泛应用于医学影像处理、视频监控、遥感图像等方面。
超分辨率OMP算法的基本原理是通过将低分辨率图像分解成一组基函数组合的线性表示,通过迭代算法不断搜索最优的表示系数,进而重构出一个更高分辨率的图像。
超分辨率成像技术的研究与应用
超分辨率成像技术的研究与应用自从数字相机和手机的普及以来,大家拍照变得越来越方便。
我们可以随时随地拿出手机拍摄,把每一个美好的瞬间都记录下来。
但是,在某些场合下,我们可能会遇到一个问题:相机的分辨率不够,拍摄的照片过于模糊,无法清晰显示细节。
这时,一种叫做超分辨率成像技术的方法可以帮助我们解决这个问题。
所谓超分辨率成像技术,就是通过一些算法将低分辨率的图像处理成高分辨率的图像。
超分辨率成像技术的研究起源于计算机视觉和图像处理领域。
在过去的几十年里,该领域的研究员们不断探索和研发各种算法和技术,让超分辨率成像技术不断得到改进和提升。
超分辨率成像技术的原理超分辨率成像技术可以分为两个阶段:图像超分辨率重建和运动补偿。
前者通过复原输入低分辨率图像的高分辨率版本来实现图像增强;后者则主要用于处理在运动下导致的运动失真,如抖动、旋转或缩放等。
在理论方面,超分辨率成像技术有许多不同的处理方法,但几乎所有算法都以使用高分辨率训练数据为前提。
这意味着这些算法需要大量高质量的数据来进行训练,以获得最佳的效果。
深度学习是目前最为成功的算法,该算法依赖于大量的图像数据来训练其深度神经网络。
与之前的技术不同之处在于,深度学习可以自动从大量数据中抽取特征,并根据这些特征进行更准确的图像重建。
近些年来,超分辨率成像技术越来越多地应用于医学、安防、无人机、航空航天等领域。
下面,我们将以医学成像为例,简单介绍超分辨率成像技术的应用。
超分辨率成像技术的应用在医学成像方面,超分辨率成像技术已被广泛使用。
医学影像设备的分辨率通常受到许多因素的限制,例如成像设备的物理性能、扫描速度和信号噪音比。
这些问题都会导致成像质量下降,使医生对患者的疾病准确诊断成为困难。
因此,利用超分辨率成像技术改善医学图像质量成为了医学领域研究热点之一。
如同上述技术原理讲述的,超分辨率成像技术的主要思路是通过图像处理方法将低分辨率的图像转换为高分辨率的图像,从而能够清晰地显示出更多细节信息,方便医生的诊断。
超分辨率图像处理技术的原理和应用

超分辨率图像处理技术的原理和应用一、引言超分辨率图像处理技术近年来备受关注,在计算机视觉、图像处理、人工智能等领域应用广泛。
这个技术可以将低分辨率图像转化成高分辨率的图像,同时保持图像的细节和质量。
本文将对超分辨率图像处理原理和应用做一些总结和归纳,帮助读者更好地理解这个领域。
二、超分辨率图像处理技术的原理超分辨率图像处理技术可以通过数学方法增加图像的分辨率,包括插值、重建和卷积神经网络等方法。
1. 插值法插值法是一种最简单和基础的超分辨率图像处理方法,它在低分辨率图像上进行像素插值操作,从而得到高分辨率图像。
这个方法的缺点是可能会导致图像模糊和失真,因为插值只是补齐了缺失的像素,没有很好的利用原有像素之间的相关性。
2. 重建法重建法是一种更高级别的超分辨率图像处理方法。
它利用低分辨率图像中的局部结构信息,通过重建形成高分辨率的图像。
这个方法通常包括两个步骤:低分辨率图像的高频信息估计和高分辨率图像的重建。
重建方法可以根据不同的算法分为基于统计学习的方法和基于稀疏编码的方法。
3. 卷积神经网络法卷积神经网络是一种现代化的超分辨率图像处理方法。
这个方法可以通过深度学习训练一个卷积神经网络,使之能够从低分辨率输入提炼出丰富高分辨率的特征。
卷积神经网络方法在超分辨率图像处理上的表现非常好,在学术界和产业界有着广泛的应用。
三、超分辨率图像处理技术的应用超分辨率图像处理技术有很多应用,包括数字图像处理、医学图像处理、机器视觉等。
1. 数字图像处理超分辨率图像处理技术可以用于对低分辨率图像进行增强和修复。
在数码相机、智能手机等数字产品中,由于摄像头分辨率的限制,拍摄的图像可能会出现模糊、缺失等问题。
超分辨率图像处理技术可以帮助改善这些问题,提高图像的清晰度和可视性。
2. 医学图像处理超分辨率图像处理技术可以用于医学影像,如计算机断层扫描(CT)、磁共振成像(MRI)等医学成像技术。
医学图像中的像素尺寸通常很小,因此超分辨率技术可以提高医学图像的清晰度和准确性。
图像超分辨技术的理论和应用探讨
图像超分辨技术的理论和应用探讨近年来,图像超分辨技术在计算机视觉领域中受到了越来越多的关注和研究。
它的重要性在于,对于给定低分辨率图像,它能够产生高分辨率的图像,从而使得图像变得更加清晰、细节更加丰富。
在实际应用中,它可以被广泛地应用于图像处理、视频重建、医学图像、监控系统、图像升级、超分辨遥感图像等领域。
本文将围绕着这个话题,对图像超分辨技术进行一定的理论与应用方面的探讨。
一、基础理论1. 学习核心:超分辨技术基于样本统计的学习,从已有的大量低分辨率图像样本中学习到低分辨率图像和高分辨率图像之间的映射关系。
然后根据所学到的知识进行比例因子预测或者新图像的超分辨重建。
2. 算法模型:超分辨技术常用的算法模型有插值算法、卷积神经网络、边缘保留法等。
其中,插值算法效率高,计算简单,但是精度不高;卷积神经网络不仅可以处理低分辨率图像,还可以有良好的泛化性能;边缘保留法则是可以更好的保留图像的边缘信息。
3. 训练数据:训练数据对于超分辨技术来说至关重要。
训练数据应该尽可能地多,并且应该包含尽可能多的图像类型和场景,这样才能从不同角度、不同维度来研究和应用超分辨技术。
此外,在使用训练数据的时候,随机性是非常重要的。
通过随机变量的方式来训练算法模型可以提高模型的泛化性,使其适用于新的数据集。
二、技术应用1. 视频重建:在监控领域,由于摄像头像素的限制,所得到的视频往往是低分辨率的。
这时候,超分辨技术可以有效地将低分辨率视频转化为高分辨率视频。
大大提高了图像的清晰度和细节。
2. 医学图像:医学图像是在临床工作中使用较多的一类图像。
医疗设备采样出来的数据量较大,但是由于设备本身的限制,图像通常产生较大的噪声和分辨率较低的问题。
超分辨技术可以在不影响图像信息的前提下,大大提高图像的清晰度和准确性。
3. 图像升级:出于美学和功能性的角度,人们常常需要将低分辨率的图像升级成高分辨率的图像。
超分辨技术可以帮助用户摆脱图像质量的瓶颈,提高图像的视觉效果和使用价值。
超分辨率图像处理研究进展
超分辨率图像处理研究进展随着科技的不断进步,图像处理技术已经成为了许多领域中不可或缺的一部分。
其中一项技术就是超分辨率图像处理技术,这项技术可以将低分辨率的图像转换成高分辨率的图像。
随着超分辨率图像处理研究的不断深入,该技术在以下领域中被广泛应用:军事、安防、医学、遥感、图像传输等。
一、超分辨率图像处理技术的基本概念超分辨率图像处理技术可以将低分辨率图像转换成高分辨率图像,并同时增加图像的纹理清晰度和细节。
这项技术旨在利用图像中的信号局部统计特性以及局部空间相关性来提高图像分辨率。
该技术的关键技术包括:插值方法、超分辨率分类方法、超分辨率边缘保护以及优化算法等。
二、超分辨率图像处理技术的分类超分辨率图像处理技术可以根据不同的方法和算法进行分类。
基于插值方式,超分辨率图像处理技术可以分为:插值算法、基于频域的算法、模型算法和基于深度学习的算法等。
基于超分辨率分类的方法,该技术可以分为:单帧超分辨率图像处理技术和多帧超分辨率图像处理技术等。
三、超分辨率图像处理技术的优点与传统的图像处理技术相比,超分辨率图像处理技术具有很多显著的优点。
例如,超分辨率图像处理技术可以使得质量较差的图像提高到一个可以接受的水平。
此外,该技术可以在低分辨率图像中提取更多的信息,增加信号的精度和准确性。
此外,在警用、医疗和军用等领域,超分辨率图像处理技术也非常实用,因为这些领域需要处理高分辨率图像以进行更准确的判断和分析。
四、超分辨率图像处理技术的应用超分辨率图像处理技术在军用中被广泛应用,例如,在高空侦查中,该技术可以提取更多的图像信息,从而为军队提供更加准确和精准的情报信息。
此外,在医疗领域,该技术也可以为医生提供更清晰和准确的医学影像,从而提高疾病的诊断准确率。
除此之外,超分辨率图像处理技术也应用在航空航天、自动驾驶、物联网等领域中。
五、超分辨率图像处理技术的挑战虽然超分辨率图像处理技术已经在各个领域中被广泛应用,但是,该技术还有许多的挑战。
使用计算机视觉技术进行图像超分辨的技巧
使用计算机视觉技术进行图像超分辨的技巧随着科技的发展,计算机视觉技术在图像处理领域扮演着越来越重要的角色。
其中,图像超分辨是计算机视觉中一个具有挑战性的任务,其目标是从低分辨率图像中恢复出高分辨率的图像。
本文将介绍一些常用的技巧,帮助读者更好地理解和应用图像超分辨技术。
首先,了解基本概念是理解图像超分辨技术的关键。
在图像超分辨中,所谓超分辨就是指从低分辨率图像中恢复出高分辨率图像的过程。
这个过程通常包括两步:图像降采样和图像恢复。
图像降采样指的是将高分辨率图像缩小到低分辨率图像的过程,通常通过抽取或平均像素来实现。
而图像恢复则是根据低分辨率图像的信息推导出尽可能接近真实高分辨率图像的过程。
接下来,我们将介绍一些使用计算机视觉技术进行图像超分辨的常用技巧。
1.双线性插值法双线性插值法是最简单的图像超分辨技术之一。
它基于像素之间的线性插值,将每个像素的值计算为最近邻的四个像素的加权平均。
虽然这种方法计算速度快,但结果缺乏细节和清晰度。
因此,在实际应用中,双线性插值法通常被用作图像超分辨的基准方法。
2.基于深度学习的超分辨方法近年来,基于深度学习的超分辨方法取得了显著的进展。
这些方法通常基于卷积神经网络(CNN)和生成对抗网络(GAN)。
卷积神经网络可以通过学习大量的图像样本来建立图像超分辨的模型,从而实现更精细的超分辨效果。
而生成对抗网络则可以通过生成逼真的高分辨率图像和对抗鉴别器网络的方式,来提高图像超分辨的质量和效果。
3.自注意力机制自注意力机制是最近被引入到图像超分辨中的一种技术。
其思想是根据图像的自身信息来自适应地调整每个像素点的权重。
自注意力机制通过计算像素之间的相似度来确定权重,从而更好地恢复出图像的细节和纹理。
4.多尺度策略在超分辨处理中,多尺度策略是一种常用的方法。
其基本思想是在恢复高分辨率图像之前,将低分辨率图像放大到多个不同尺度,并分别进行超分辨处理。
最后,将不同尺度的超分辨结果进行融合,从而得到更好的超分辨效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2超分辨处理理论基础
2.1超分辨率基础知识
2.1.什么是分辨率
分辨率是屏幕图像的精密度,是指显示器所能显示的像素的多少。
由于屏幕上的点、线和面都是由像素组成的,显示器可显示的像素越多,画面就越精细,同样的屏幕区域内能显示的信息也越多,所以分辨率是个非常重要的性能指标之一。
可以把整个图像想象成是一个大型的棋盘,而分辨率的表示方式就是所有经线和纬线交叉点的数目。
分辨率决定了位图图像细节的精细程度。
通常情况下,图像的分辨率越高,所包含的像素就越多,图像就越清晰,印刷的质量也就越好。
同时,它也会增加文件占用的存储空间。
用于量度位图图像内数据量多少的一个参数。
通常表示成ppi(每英寸像素)。
包含的数据越多,图形文件的长度就越大,也能表现更丰富的细节。
但更大的文件也需要耗用更多的计算机资源,更多的ram,更大的硬盘空间等等。
在另一方面,假如图像包含的数据不够充分(图形分辨率较低),就会显得相当粗糙,特别是把图像放大为一个较大尺寸观看的时候。
所以在图片创建期间,我们必须根据图像最终的用途决定正确的分辨率。
这里的技巧是要首先保证图像包含足够多的数据,能满足最终输出的需要。
同时也要适量,尽量少占用一些计算机的资源。
通常,“分辨率”被表示成每一个方向上的像素数量,比如640x480等。
而在某些情况下,它也可以同时表示成“每英寸像素”(ppi)以及图形的长度和宽度。
比如72ppi,和8x6英寸。
2.1.1什么是超分辨
图像的超分辨率(super resolution , SR)是指由一幅低分辨率图像(low resolution , LR)或图像序列恢复出高分辨率图像(high resolution , HR )。
低分辨率
的图像包含的细节信息较少,但我们可以得到一系列低分辨率的图像,这些图像包含的部分细节信息各有不同,能够相互补充。
通过这一系列低分辨的图像,经过一定的处理,可以得到一幅分辨率较高、包含信息较多的图像。
这个处理过程就是超分辨率重建。
在图像采集系统中,光学传感器的分辨率不能满足一些特殊应用的需求,而且成像过程受加性噪声及透镜点扩散函数(PSF, Point Spread Function)的影响,
因此,图像成像过程只能获得降质的低分辨率图像}s-ion。
尽管随着技术的进步,传感器的分辨率有了明显的提高,但受成本的影响,也限制了其使用范围,而且受工艺等因素的影响,依靠提高传感器的分辨率来提高图像质量的能力是有限的。
按照傅立叶光学的观点,在成像系统中的光学透镜是一个低通滤波器,由于受到光学衍射的影响,其传递函数在由衍射极限分辨率所决定的某个截止频率以上的值均为零,图像超分辨率处理试图重构截止频率以外的信息。
另一方面,对于通常的图像显示设备具有固定的分辨率,而对低分辨率的图
像数据,需要进行超分辨率处理获得与显示设备相匹配的分辨率才能正常显示(如HDTV High-Definition TV),这一过程本质上也是一种图像超分辨处理。
2.1.2超分辨处理技术
超分辨率处理技术的方法有多种,这里我们阐述几个目前最常使用的方法:(1)基于插值。
该方法是目前超分辨率研究中最直观的方法。
通过对该图像的多帧进行比较估计,得到它们之间的相对关系信息,以此获得高分辨率图像在非均匀间距采样点上的像素值。
然后通过非均匀插值的方法,经过一定的插值,就可以得到一幅高分辨率的图像。
当然,这样得到的图像会存在噪音、模糊等问题,因此可以通过图像恢复技术进行一定的修复。
(2)基于重建。
该方法主要有配准和重建两个关键步骤。
在配准时,利用多帧低分辨的图像作为数据一致性的约束,这样可以获得其他低分辨率的图像和参考低分辨图像之间的亚像素精度的相对运动。
重建时,可以利用图像的先验知识对目标图像进行优化。
该方法常见的算法有迭代方向投影、最大后验概率、凸集投影等。
(3)基于学习。
该方法的前提是认为低分辨率的图像完全拥有用于推理预测其所对应的高分辨率部分的信息。
这样就可以对一个低分辨率图像集进行训练,产生一个学习模型,这个模型可以计算出图像高频细节信息。
目前,常用的学习算法有Freeman等人提出的Example-based方法、Chang等人提出的基于邻域嵌入的方法等等。
本文介绍的单帧超分辨重建算法是基于插值的超分辨处理技术。
基本任务是消除模糊。
基本思路:先建立退化的数学模型,然后根据该模型对退化图像进行拟合。
单帧超分辨率技术利用空间有界和频带限制之间的不相容性来重建特定图
像中衍射极限以外的频谱。
Wang等提出了有向滤波器,保护有向多项式表示的有向图像特征。
Ayazifar提出了边缘保持的插值技术,该技术不仅能沿线性边缘插值,也能沿弯曲的轮廓插值。
Schultz等将插值图像看作是非连续性保持的
Huber-Markov随机场,并计算它的最大后验概率(MAP)估算,以获得高分辨率图像。
Thurnhofer等提出了图像插值的自适应算法,并进行了视觉边缘增强。
2.1.3超分辨率理论基础
在图像超分辨率重建算法中,首先要建立高分辨率图像之间的关系。
一般来说,在单帧图像超分辨图像重建算法中,几何扭曲可以忽略不计,因此可以将图像获取过程中的退化现象模拟为原始高分辨率图像经过光学模糊、下采样和噪声干扰等一系列过程,用数学表达式表示如式所示:
Y=DBX+n(2.1) 其中,X表示原始的高分辨率图像,Y表示经过退化后的低分辨率图像,D 表示下采样因子,B表示模糊因子,n表示噪声。
图2.1 单帧超分辨算法模型图
单帧图像超分辨算法模型如图2.1所示。
从图2.1可以看出,图像超分辨率重建就是利用信号处理方法求解图像退化的逆过程,即利用获得的低分辨率图像Y,通过超分辨率算法估计出满足需要的高分辨率图像X。
2.2单帧超分辨插值算法的基本理论
在生产和科研过程中经常会用到数学中的各种插值算法,如果在其中遇到Y 二f(x),是不能直接写出表达式的,而是假定区间「a, b」上的实函数f(x)在该区间上n+1个相互不同的点x0,x1,x2,......,xn处的值是
f[xo],F[x1],......,f[xn],要求估算f(x)在[a,b),b中某点xz,的值。
其解决的基本思路是,找到一个函数P(x),在xo,x1,......,xn。
的节点上与f(x)函数相同,甚至一阶导数值也相同,用P(xZ)的值作为函数f(xz)的近似。
而计算过程中通常的做法是:在事先选定的一个由简单函数构成的有n+1个参数c0,c1,……,cn的函数类中φ(c0,c1,……,cn)中求出满足条件
P(xi)=f(xi)(i=0,1,......,n)的函数P(x),并以P(x)作为f(x)的估值。
此处f(x)称为被插值函数x0,x1,x2,......,xn称为插值结点,φ(c0,c1,……,cn)称为插值函数类,上面的等式称为插值条件φ(c0,c1,……,cn)称为插值函数,
R(x)=f(x)-P(x)称为插值余项。
当估算点属于包含x0,x1,x2,......,xn的最小闭区间时,相应的插值称为内插,否则为外插。
在数字图像的几何变换处理过程中所运用的插值,插值的几何意义就是通过n+1个点(xi,yi)(i=0,1,......,n)做一条代数曲线y=Pn(x)使其近似于代数曲线y=f(x)。
在数学上较为常见的几种插值类型为:多项式插值、埃尔米特插值、分段插值、样条插值、三角函数插值等,这些插值的具体原理本文就不予以详细介绍了。