彩色图像区域生长代码
【国家自然科学基金】_hsi色彩空间_基金支持热词逐年推荐_【万方软件创新助手】_20140801
科研热词 土壤空间预测 可视化表达 不确定性 hsi模型
推荐指数 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 1色彩空间 舌质舌苔分割 舌诊 舌尖红 舌尖瘀点 目标识别 模糊聚类 材质 最佳阈值迭代算法 彩色图像分割 区域生长 动态窗口 位与算法 k-均值聚类 hsi空间
推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
科研热词 hsi色彩空间 预处理 边缘检测 色彩合成技术 舌质舌苔分割 舌诊 纹理 模糊连续制图 材质 支持向量机 rgb模型 k-均值聚类 hsi模型 hsi cielab
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
科研热词 视频评价准则 视频增强 肤色检测 污秽状态 核主元分析 径向基神经网络 彩色铅笔画 对比度增强 决策级融合 信息融合 低照度 yuv yiq lic kirsch算子 hsi his色彩空间 fisher准则
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9
2011年 科研热词 视频分类 色彩风格 累计直方图 对数图像处理 多尺度retinex 图像增强 亮度划分 hsi颜色空间 hsi空间 推荐指数 1 1 1 1 1 1 1 1 1
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Matlab常见函数汇总
colorbar 显示彩条getimage 由坐标轴得到图像数据ice(DIPUM)交互彩色编辑image 创建和显示图像对象imagesc 缩放数据并显示为图像immovie 由多帧图像制作电影imshow 显示图像imview 在Image Viewer中显示图像montage 将多个图像帧显示为矩阵蒙太奇movie 播放录制的电影帧rgbcube 显示一个彩色RGB立方体subimage 在单个图形中显示多幅图像truesize 调整图像的显示尺寸warp 将图像显示为纹理映射的表面图像文件输入/输出Dicominfo 从一条DICOM消息中读取元数据Dicomread 读一幅DICOM图像Dicomwrite 写一幅DICOM图像Dicom-dict.txt 包含DICOM数据字典的文本文件Dicomuid 产生DICOM唯一的识别器Imfinfo 返回关于图像的文件的信息Imread 读图像文件Imwrite 写图像文件图像算术Imabsdiff 计算两幅图像的绝对差Imadd 两幅图像相加或把常数加到图像上Imcomplement 图像求补Imdivide 两幅图像相除,或用常数除图像Imlincomb 计算图像的线性组合Immultiply 两幅图像相乘或用常数乘图像Imsubtract 两幅图像相减,或从图像中减去常数几何变换Checkerboard 创建棋盘格图像Findbounds 求几何变换的输出范围Fliptform 颠倒TFORM结构的输入/输出Imcrop 修剪图像Imresize 调整图像大小Imrotate 旋转图像Imtransform 对图像应用几何变换Intline 整数坐标线绘制算法Makersampler 创建重取样器结构Maketform 创建几何变换结构(TFORM)Pixeldup(DIPUM)在两个方向上复制图像的像素Tformarray 对N-D数组应用几何变换Tformfwd 应用正向几何变换Tforminv 应用反向几何变换Vstformfwd(DIPUM)可视化正向几何变换图像匹配Cpstruct2pairs 将CPSTRUCT转换为有效的控制点对Cp2tform 由控制点对推断几何变换Cpcorr 使用互相关校准控制点位置Cpselect 控制点选择工具Normxcorr2 归一化二维互相关像素值及统计Corr2 计算二维相关系数Covmatrix(DIPUM)计算向量族的协方差矩阵Imcontour 创建图像数据的轮廓线Imhist 显示图像数据的直方图Impixel 确定像素的彩色点Improfile 计算沿着线段的像素值横截面Mean2 计算矩阵元素的均值Pixval 显示关于像素的信息Regionprops 测量图像区域的属性Statmoments(DIPUM)计算一幅图像直方图的统计中心距Std2 计算矩阵元素的标准偏差图像分析(包括分割、描述和识别)Bayesgauss(DIPUM)高斯模式的贝叶斯分类器Bound2eight(DIPUM)将4连接边界转换为8连接边界Bound2four(DIPUM)将8连接边界转换为4连接边界Bwboundaries 追踪区域边界Bwtraceboundary 追踪单个边界Bound2im(DIPUM)将边界转换为图像Boundaries(DIPUM)追踪区域边界Bsubsamp(DIPUM)对边界二次取样Colorgrad(DIPUM)计算一幅RGB图像的向量梯度Colorseq(DIPUM)分割一幅彩色图像Connectpoly(DIPUM)连接多边形的顶点Diameter(DIPUM)测量图像区域的直径Edge(DIPUM)在一幅亮度图像中寻找边缘Fchcode(DIPUM)计算边界的freeman链码Frdescp(DIPUM)计算傅里叶描绘子Graythresh 使用Ostu方法计算图像的全局阈值Hough(DIPUM) Hough变换Houghlines(DIPUM)基于Hough变换提取线段Houghpeaks(DIPUM)在Hough变换中检测峰值Houghpixels(DIPUM)计算属于Hough变换bin的图像像素Ifrdescp(DIPUM)计算逆傅里叶描绘子Imstack2vectors(DIPUM)从图像堆栈提取向量Invmoments(DIPUM)计算图像不变距Mahalanobis(DIPUM)计算Mahalanobis距离Minperpoly(DIPUM)计算最小周长多边形Polyangles(DIPUM)计算多边形内角Princomp(DIPUM)得到主分量向量和相关量Qtdecomp 执行四叉树分解Qtgetblk 得到四叉树分解中的块值Qtsetblk 在四叉树中设置块值Randvertex(DIPUM)随机置换多边形顶点Regiongrow(DIPUM)由区域生长来执行分割Signature(DIPUM)计算边界的标记Specxture(DIPUM)计算图像的谱纹理Splitmerge(DIPUM)使用分离-合并算法分割图像Statxture(DIPUM)计算图像中纹理的统计度量Strsimilarity(DIPUM)两个串间的相似性度量X2majoraxis(DIPUM)以区域的主轴排列坐标x图像压缩Compare(DIPUM)计算和显示两个矩阵间的误差Entropy(DIPUM)计算矩阵的熵的一阶估计Huff2mat(DIPUM)解码霍夫曼编码矩阵Huffman(DIPUM)为符号源建立一个变长霍夫曼码Im2jpeg(DIPUM)使用JPEG近似压缩一幅图像Im2jpeg2k(DIPUM)使用JPEG2000近似压缩一幅图像Imratio(DIPUM)计算两幅图像或变量中的比特率Jpeg2im(DIPUM)解码IM2JPEG压缩的图像Jpeg2k2im(DIPUM)解码IM2JPEG2K压缩的图像Lpc2mat(DIPUM)解压缩一维有损预测编码矩阵Mat2huff(DIPUM)霍夫曼编码矩阵Mat2lpc(DIPUM)使用一维有损预测编码矩阵Quantize(DIPUM)量化UINT8类矩阵的元素图像增强Adapthisteq 自适应直方图量化Decorrstretch 对多通道图像应用去相关拉伸Gscale(DIPUM)按比例调整输入图像的亮度Histeq 使用直方图均衡化来增强对比度Intrans(DIPUM)执行亮度变换Imadjust 调整图像亮度值或彩色映射Stretchlim 寻找对比度拉伸图像的限制图像噪声Imnoise 给一幅图像添加噪声Imnoise2(DIPUM)使用指定的PDF生成一个随机数数组Imnoise3(DIPUM)生成周期噪声线性和非线性空间滤波Adpmedian(DIPUM)执行自适应中值滤波Convmtx2 计算二维卷积矩阵Dftcorr(DIPUM)执行频率域相关Dftfilt(DIPUM)执行频率域滤波Fspecial 创建预定义滤波器Medfilt2 执行二维中值滤波Imfilter 滤波二维和N维图像Ordfilter2 执行二维顺序统计滤波Spfilt(DIPUM)执行线性和非线性空间滤波Wiener2 执行二维去噪滤波线性二维滤波器设计Freqspace 确定二维频率响应间隔Freqz2 计算二维频率响应Fsamp2 使用频率取样设计二维FIR滤波器Ftrans2 使用频率变换设计二维FIR滤波器Fwind1 使用一维窗法设计二维滤波器Fwind2 使用二维窗法设计二维滤波器Hpfilter(DIPUM)计算频率域高通滤波器Lpfilter(DIPUM)计算频率域低通滤波器图像去模糊(复原)Deconvblind 使用盲去卷积去模糊图像Deconvlucy 使用Lucy-Richardson方法去模糊Deconvreg 使用规则化滤波器去模糊Deconvwnr 使用维纳滤波器去模糊Edgetaper 使用点扩散函数锐化边缘Otf2psf 光传递函数到点扩散函数Pst2otf 点扩散函数到光传递函数图像变换Dct2 二维离散余弦变换Dctmtx 离散余弦变换矩阵Fan2para 将扇形束投影变换为并行射束Fanbeam 计算扇形射束变换Fft2 二维快速傅里叶变换Fftn N维快速傅里叶变换Fftshift 颠倒FFT输出的象限Idct2 二维逆离散余弦变换Ifanbeam 计算扇形射束逆变换Ifft2 二维快速傅里叶逆变换Ifftn N维快速傅里叶逆变换Iradon 计算逆Radon变换Para2fan 将并行射束投影变换为扇形射束Phantom 生成头部仿真模型的图像Radon 计算Radon变换小波Wave2gray(DIPUM)显示小波分解系数Waveback(DIPUM)执行多灰度级二维快速小波逆变换Wavecopy(DIPUM)存取小波分解结构的系数Wavecut(DIPUM)在小波分解结构中置零系数Wavefast(DIPUM)执行多灰度级二维快速小波变换Wavefilter(DIPUM)构造小波分解和重构滤波器Wavepaste(DIPUM)在小波分解结构中放置系数Wavework(DIPUM)编辑小波分解结构Wavezero(DIPUM)将小波细节系数设置为零领域和块处理Bestblk 为块处理选择块大小Blkproc 为图像实现不同的块处理Col2im 将矩阵列重排为块Colfilt 按列邻域操作Im2col 将图像块重排为列Nlfilter 执行一般的滑动邻域操作形态学操作(亮度和二值图像)Conndef 默认连通性Imbothat 执行底帽滤波Imclearborder 抑制与图像边框相连的亮结构Imclose 关闭图像Imdilate 膨胀图像Imerode 腐蚀图像Imextendedmax 最大扩展变换Imextendedmin 最小扩展变换Imfill 填充图像区域和孔洞Imhmax H最大变换Imhmin H最小变换Imimposemin 强制最小Imopen 打开图像Imreconstruct 形态学重构Imregionalmax 局部最大区域Imregionalmin 局部最小区域Imtophat 执行顶帽滤波Watershed 分水岭变换形态学操作(二值图像)Applylut 使用查表法执行邻域操作Bwarea 计算二值图像中的对象面积Bwareaopen 打开二值区域(删除小对象)Bwdist 计算二值图像的距离变换Bweuler 计算二值图像的欧拉数Bwhitmiss 二值击不中操作Bwlabel 在二维图像中标记连接分量Bwlabeln 在N维二值图像中标记连接分量Bwmorph 对二值图像执行形态学操作Bwpack 打包二值图像Bwperim 确定二值图像中的对象的周长Bwselect 选择二值图像中的对象Bwulterode 最终腐蚀Bwunpack 解包二值图像Endpoints(DIPUM)计算二值图像的端点Makelut 构建applylut使用的查找表结构元素(STREL)的创建和操作Getheight 得到strel的高度Getneighbors 得到strel邻域的偏移位置和高度Getnhood 得到strel邻域Getsequence 得到分解的strel序列Isflat 对平坦的strel返回值Reflect 以其中心反射strelStrel 创建形态学结构元素Translate 变换strel基于区域的处理Histroi(DIPUM)计算图像中的ROI的直方图Poly2mask 将ROI多边形转换为掩膜Roicolor 基于颜色选择ROIRoifill 在任意区域内平稳地内插Roifilt2 对ROI进行滤波Roipoly 选择多边形ROI彩色映射处理Brighten 加亮或加暗彩色映射Cmpermute 在彩色映射中重排颜色Cmunique 寻找唯一的彩色映射颜色和相应的图像Colormap 设置或得到彩色查找表Imapprox 以很少的颜色近似被索引的图像Rgbplot 绘制RGB彩色映射分量彩色空间转换Applyform 应用独立于设备的彩色空间变换Hsv2rgb 将HSV值转换为RGB彩色空间Iccread 读ICC彩色配置文件Lab2double 将L*a*b*彩色值转换为double类Lab2uint16 将L*a*b*彩色值转换为uint16类Lab2uint8 将L*a*b*彩色值转换为uint8类Makecform 创建独立于设备的彩色空间变换结构Ntsc2rgb 将NTSC值转换为RGB彩色空间Rgb2hsv 将RGB值转换为HSV彩色空间Rgb2ntsc 将RGB值转换为NTSC彩色空间Rgb2ycbcr 将RGB值转换为YCBCR彩色空间Ycbcr2rgb 将YCBCR值转换为RGB彩色空间Rgb2hsi(DIPUM)将RGB值转换为HSI彩色空间Hsi2rgb(DIPUM)将HSI值转换为RGB彩色空间Whitepoint 返回标准照明的XYZ值Xyz2double 将XYZ彩色值转换为double类Xyz2uint16 将XYZ彩色值转换为uint16类数组操作Circshift 循环地移位数组Dftuv(DIPUM)计算网格数组Padarray 填充数组Paddedsize(DIPUM)计算用于FFT的最小填充尺寸图像类型和类型转换Changeclass 改变一幅图像的类Dither 使用抖动转换图像Gray2ind 将亮度图像转换为索引图像Grayslice 通过阈值处理从亮度图像创建索引图像Im2bw 通过阈值处理将图像转换为二值图像Im2double 将图像数组转换为双精度Im2java 将图像转换为Java图像Im2java2d 将图像转换为Java缓存的图像对象Im2uint8 将图像数组转换为8比特无符号整数Im2uint16 将图像数组转换为16比特无符号整数Ind2gray 将索引图像转换为亮度图像Ind2rgb 将索引图像转换为RGB图像Label2rgb 将标记矩阵转换为RGB图像Mat2gray 将矩阵转换为亮度图像Rgb2gray 将RGB图像或彩色映射转换为灰度图像Rgb2ind 将RGB图像转换为索引图像其他函数Conwaylaws(DIPUM)对单个像素应用Conway的遗传定律Manualhist(DIPUM)交互地生成2模式直方图Twomodegauss(DIPUM)生成一个2模式高斯函数Uintlut 基于查找表计算新数组值工具箱参数Iptgetpref 获得图像处理工具箱参数的值Iptsetpref 设置图像处理工具箱参数的值。
基于区域生长的彩色图像分割算法
基于区域生长的彩色图像分割算法抽象—图像分割不仅是图像处理领域的一个经典的研究主题,也是图像处理技术的热点和焦点。
随着计算机处理技术的发展和彩色应用范围的增加,彩色图像分割算法引起研究人员越来越多的关注。
彩色图像分割算法可以被看作是在灰度分割算法上的一个扩展。
但是彩色图像具有丰富的信息功能或研究一个特别适用彩色图像分割的新的图像分割方法来改善原始灰度图像。
本文提出了在传统的种子区域生长的基础上形成与流域相结合的算法的一种彩色图像自动分割区域的方法。
关键词:彩色图像分割分水岭算法种子区域生长算法1INTRODUCTION人们只关心在图像的研究和应用中的某些部分,这些部分经常被称为目标或前景,它们通常对应于图像的特定性质或特定领域。
这就需要提取并将它们分辨识别和分析对象。
在此基础上可能进一步对目标作用。
图像分割是一种技术和工艺,它可以将其分为不同的区域形象特征,并提取有利的目标。
这些特色可以是像素,灰度,颜色,质地等。
预先定义的目标可以对应一个区域或多个区域。
为了说明图像处理分割的水平,我们已经介绍了“形象工程”概念,它是涉及图像分割的理论,方法,算法,工具,设备而成德一个整体框架。
图像工程师应用研究图像领域的一个新课题,它内容非常丰富,根据抽象程度和研究方法的不同,它可以被分为三个层次: 图像处理,图像分析和图像理解。
图像处理重点在于图像之间的转化和提高图像的视觉效果。
图像分析主要是监测和衡量制定目标图像,以获取其客观信息来描述图像。
图像理解的关键是进一步研究每个目标的性质及其相互间的联系,以及得到原始图像的客观情况的解释,一次来为图像指导并计划采取措施。
图像处理,图像分析和图像理解有不同的操作。
图像处理时比较低级别的操作,它主要致力于像素水平,图像分析是中极水平,它着重于测量,表达和描述目标物。
图像理解主要是高层次的运作,本质上它注重通过计算和对数据符号的推理来描述事物。
图像分割是从图像处理到图像分析的关键步骤。
matlab regiongrowing函数源码

MATLAB中的regiongrowing函数用于图像分割。
以下是一个简单的regiongrowing函数实现:```matlabfunction [output] = regiongrowing(input, seed, threshold)输入参数:input - 输入图像(灰度图)seed - 种子点坐标(row, col)threshold - 阈值,用于确定像素是否属于同一区域输出参数:output - 分割后的图像(二值图)初始化输出图像output = zeros(size(input));获取图像尺寸[rows, cols] = size(input);将种子点标记为已访问output(seed(1), seed(2)) = 1;定义8个方向的偏移量directions = [-1, 0; 0, -1; -1, 1; 1, -1; 1, 0; 0, 1; -1, -1; 1, 1];循环直到所有像素都被访问while any(output == 0)遍历所有未访问的像素for i = 1:rowsfor j = 1:colsif output(i, j) == 0获取当前像素的值current_value = input(i, j);遍历当前像素的邻居for k = 1:size(directions, 1)计算邻居的坐标ni = i + directions(k, 1);nj = j + directions(k, 2);检查邻居是否在图像范围内且未被访问if ni >= 1 && ni <= rows && nj >= 1 && nj <= cols && output(ni, nj) == 0计算邻居与当前像素的差值diff = abs(current_value - input(ni, nj));如果差值小于阈值,则将邻居标记为已访问if diff < thresholdoutput(ni, nj) = 1;endendendendendendendend```这个函数接受一个灰度图像、一个种子点坐标和一个阈值作为输入,返回一个二值图像,表示分割后的区域。
基于融合颜色信息与深度信息的区域生长算法的物体定位
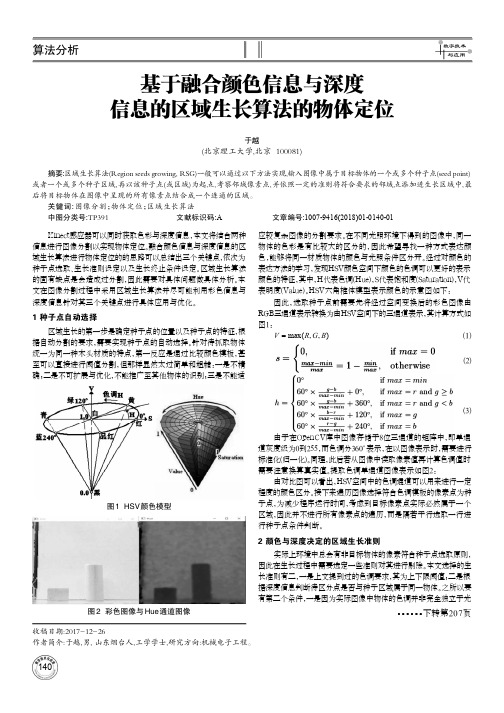
140Kinect感应器可以同时获取色彩与深度信息,本文将结合两种信息进行图像分割以实现物体定位。
融合颜色信息与深度信息的区域生长算法进行物体定位的的思路可以总结出三个关键点,依次为种子点选取、生长准则设定以及生长终止条件设定。
区域生长算法的固有缺点是会造成过分割,因此需要对具体问题做具体分析。
本文在图像分割过程中采用区域生长算法并尽可能利用彩色信息与深度信息针对其三个关键点进行具体应用与优化。
1 种子点自动选择区域生长的第一步是确定种子点的位置以及种子点的特征,根据自动分割的要求,需要实现种子点的自动选择。
针对待抓取物体统一为同一种木头材质的特点,第一反应是通过比较颜色模板,甚至可以直接进行阈值分割,但那样显然太过简单和粗糙:一是不精确;二是不可扩展与优化,不能推广至其他物体的识别;三是不能适应较复杂图像的分割要求。
在不同光照环境下得到的图像中,同一物体的色彩是有比较大的区分的,因此希望寻找一种方式表达颜色,能够将同一材质物体的颜色与光照条件区分开。
经过对颜色的表达方法的学习,发现HSV颜色空间下颜色的色调可以更好的表示颜色的特征,其中,H代表色调(Hue),S代表饱和度(Saturation),V代表明度(Value)。
HSV六角椎体模型表示颜色的示意图如下:因此,选取种子点前需要先将经过空间变换后的彩色图像由RGB三通道表示转换为由HSV空间下的三通道表示,其计算方式如图1:max(,,)VR GB(1)(2)(3)由于在OpenCV库中图像存储于8位三通道的矩阵中,即单通道灰度级为0到255,而色调分360°表示,在以图像表示时,需要进行标准化(归一化)。
同理,此后若从图像中读取像素值再计算色调值时需要注意换算真实值。
提取色调单通道图像表示如图2:由对比图可以看出,HSV空间中的色调通道可以用来进行一定程度的颜色区分。
接下来遍历图像选择符合色调模板的像素点为种子点,为减少程序运行时间,考虑到目标像素点实际必然属于一个区域,因此并不进行所有像素点的遍历,而是隔若干行选取一行进行种子点条件判断。
图像分割实验报告
医学图像处理实验报告实验名称:图像分割设计实验姓名:gaojunqiang学号:20105405班级:生医 1001指导教师:……2013年6月5日一、实验目的1、编程实现下列功能:读出存储的黑白灰度图象并显示,用拉普拉斯算子对图象进行边缘检测,显示处理后图象,存储处理后图象。
2、编程实现下列功能:读出存储的黑白灰度图象并显示,用鼠标点击图象上某一点,以灰度相近原则进行区域生长,显示处理后图象,存储处理后图象。
二、实验原理1、拉普拉斯边缘检测二维函数f(x,y)的拉普拉斯是一个二阶的微分定义为:∇2f = [∂2f / ∂x2 ,∂2f / ∂y2]一般情况下可以用一个拉普拉斯模板算子。
模板算子分为4邻域和8邻域,如下∇2f = 4z5 – (z2 + z4 + z6 + z8)∇2f = 8z5 – (z1 + z2 + z3 + z4+z5 + z6 + z7+ z8)2、区域增长区域增长是通过一个起始点作为种子点对他周围的点进行选择。
它采取的是一种迭代的思想。
区域增长也分为四邻域和八邻域两种方式。
通过像素的集合进行区域增长的算法如下:1)根据图像的不同应用选择一个或一组种子,它或者是最亮或最暗的点,或者是位于点簇中心的点。
2)选择一个描述符(条件)3)从该种子开始向外扩张,首先把种子像素加入集合,然后不断将与集合中各个像素连通、且满足描述符的像素加入集合4)上一过程进行到不再有满足条件的新结点加入集合为止。
三、实验代码及结果1、拉普拉斯边缘检测代码如下:%主函数如下:clc;close all;clear all;Imag = imread('lena.tiff');ImagGray = rgb2gray(Imag); %将彩色图片转换成灰度图片figure()imshow(ImagGray),title('灰度图像');% T = graythresh(ImagGray); %用大津法自动确定阈值% I=edge(ImagGray,'log',0.004);% figure(),imshow(I), title('laplace边缘图像');ImagGray = double(ImagGray);T = 60; %设置阈值LapModType = 8; %设置laplace模板方式ImagLapEdge = LaplaceEdge(ImagGray,LapModType,T); %laplace边缘检测ImagLapEdge = uint8(ImagLapEdge);figure()imshow(ImagLapEdge),title('laplace边缘图像');%拉普拉斯边缘检测函数如下:function ImagLapEdge = LaplaceEdge(ImagGray,MoldType,Thresh)%-----------------参数介绍--------------------%输入参数:% ImagGray: 输入的灰度图像% MoldType: 摸板类型,包括四邻域和八邻域% Thresh: 边缘检测阈值%输出参数:% ImagEdge:边缘像素点,存储的是二值化图像[r,c] = size(ImagGray);ImagLapEdge = zeros(r,c);%四邻域拉普拉斯边缘检测算子if 4 == MoldTypefor i = 2:r-1for j = 2:c-1Temp =-4*ImagGray(i,j)+ImagGray(i-1,j)+ImagGray(i+1,j)+ImagGray(i,j-1)+ImagGray(i,j+1); if Temp > ThreshImagLapEdge(i,j) = 255;elseImagLapEdge(i,j) = 0;endendendend%八邻域拉普拉斯边缘检测算子if 8 == MoldTypefor i = 2:r-1for j = 2:c-1Temp =-8*ImagGray(i,j)+ImagGray(i-1,j)+ImagGray(i+1,j)+ImagGray(i,j-1)+ImagGray(i,j+1)+ImagGray(i-1,j-1)+ImagGray(i+1,j+1)+ImagGray(i+1,j-1)+ImagGray(i-1,j+1);if Temp > ThreshImagLapEdge(i,j) = 255;elseImagLapEdge(i,j) = 0;endendendend拉普拉斯边缘检测实验结果如下:图1 原灰度图像图2 拉普拉斯8邻域模板边缘检测图像图3拉普拉斯4邻域模板边缘检测图像2、区域增长实验代码:主函数如下:clc;close all;clear all;Imag = imread('lena.jpg');figure()imshow(Imag), title('原灰度图片');n = 4; %设置区域增长的种子点数[x,y] = ginput(n); %在图像上取点V = [y,x];V = uint16(V);thresh = 33; %区域增长的阈值growingtype = 8; %增长方式[regionGet,imout,regionsize]=regiongrowing(V,Imag,thresh,growingtype); %区域增长函数figure()imshow(imout), title('区域分割后的图片');hold onplot(x,y,'+');由于区域增长代码老师已给这里就不在写出。
彩色图像分割
二值、灰度形态学
二值形态学中的运算对象是集合。设A为图像集合,S为结 构元素,数学形态学运算是用S对A进行操作。需要指出,实际 上结构元素本身也是一个图像集合。对每个结构元素可以指定 一个原点,它是结构元素参与形态学运算的参考点。应注意, 原点可以包含在结构元素中,也可以不包含在结构元素中,但 运算的结果常不相同。以下用阴影代表值为1的区域,白色代表 值为0的区域,运算是对值为1的区域进行的。二值形态学中两 个最基本的运算——腐蚀与膨胀,如图所示。
基本符号和术语
1. 元素和集合
在数字图像处理的数学形态学运算中,把一幅图像称为一个 集合。对于二值图像而言,习惯上认为取值为1的点对应于景 物中心,用阴影表示,而取值为0的点构成背景,用白色表示, 这类图像的集合是直接表示的。考虑所有值为1的点的集合为 A, 则A与图像是一一对应的。对于一幅图像A,如果点a在A
y S1
O
y
x X
X○ S1 X○ S2
O S2
x
(a)
(b)
X (c)
图 (a) 结构元素S1和S2
(b) X○S1
(c) X○S2
y S1
O
y
x
S1 X
X● S1
X● S2
O S2
x
X
S1
(a)
(b)
图 (a) 结构元素S1和S2
(c)
(b) X●S1; (c) X●S2
区域生长算法(附MATLAB代码实现)

区域⽣长算法(附MATLAB代码实现)⼀、理论概念 区域⽣长是按照事先定义的⽣长准则将⼀个像素或者⼦区域逐步聚合成⼀个完整独⽴的连通区域过程。
对于图像感兴趣⽬标区域R,z为区域R上事先发现的种⼦点,按照规定的⽣长准则逐步将与种⼦点z⼀定邻域内符合相似性判据的像素合并成⼀个种⼦群以备下⼀阶段的⽣长,这样不断的进⾏循环⽣长直到满⾜⽣长停⽌条件为⽌,从⽽完成了对感兴趣区域由⼀个种⼦点⽣长为⼀个独⽴连通区域的过程。
其中相似性判据可以是像素灰度值、颜⾊、纹理特征等图像信息。
因此区域⽣长算法⼀般分为三个步骤实现:(1) 确定⽣长种⼦点(2) 规定⽣长准则(3) 确定⽣长停⽌条件实际⼯程应⽤中区域⽣长算法常被⽤于对⼆值化图像指定连通区域的分割。
图1以图⽂⽅式对区域⽣长算法的三步骤进⾏解释:①原始⼆值化图像(a)中的红⾊标注的像素为指定⽣长点;②图像(b)和(c)是采⽤不同⽣长准则进⾏区域⽣长的结果,其中图(b)是在4邻域下,待测像素与⽣长点像素灰度值相等的像素集合。
正如图中所⽰第1次⽣长时,与⽣长点像素灰度相等的像素有上、下、左、右四个像素,接着第⼆次⽣长时,就由前⼀次已经⽣长的像素按照同样的准则进⾏下去,直到遇到图像边界或背景区域时⽣长停⽌。
图(c)是在8邻域下,待测像素与⽣长点像素灰度值相等的像素集合。
⼆、MATLAB⽰例代码实现2.1 主函数⽂件%主⽂件clc;clear all;close all;%申明全局变量 R:区域⽣长的结果图像;BW:⼆值化图像;counter:感兴趣连通区域的像素个数%row:图像的⾏数;col:图像的列数global R BW counter row colI = imread('E:\MATLAB仿真\fsr.bmp');I = I(:,:,1);[row,col] = size(I);figure,imshow(I);level = graythresh(I);BW = im2bw(I,level);figure,imshow(BW);[y0,x0] = getpts;x0 = uint32(x0);y0 = uint32(y0);counter = 0;R = zeros(row,col);R = uint8(R);fsrRegiongrow(x0,y0,4);% fsrRegiongrow1(x0,y0,4);figure,imshow(R);2.2 函数模块1function fsrRegiongrow(x0,y0,mode)%功能:通过函数递归⽅法对⼆值化图像指定连通区域实现区域⽣长%输⼊参数: x0,y0表⽰⽣长点像素坐标,mode表⽰以多⼤邻域进⾏区域⽣长,常取mode = 4;mode = 8;%输出参数: void%作者&时间:奔跑在湘边———2016年5⽉6⽇global R BW counter row colif 8 == modefor i = -1 : 1for j = -1 : 1x1 = x0 + i;y1 = y0 + j;%⽣长准则:判断⽣长点8邻域内像素的各⾃灰度值是否与⽣长点所在像素灰度值相等if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendendelseif 4 == modefor i = -1 : 1x1 = x0 + i;y1 = y0;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendx1 = x0;y1 = y0 - 1;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endx1 = x0;y1 = y0 + 1;if x1 > 0 && x1 <= row && y1 > 0 && y1 <= col && BW(x1,y1) == BW(x0,y0) && 0 == R(x1,y1)R(x1,y1) = 255;counter = counter + 1;fsrRegiongrow(x1,y1,mode);endendend2.3 函数模块2function fsrRegiongrow1(x0,y0,mode)%功能:模拟栈的先进后出思路对⼆值化图像指定连通区域实现区域⽣长%输⼊参数: x0,y0表⽰⽣长点像素坐标,mode表⽰以多⼤邻域进⾏区域⽣长,常取mode = 4;mode = 8;%输出参数: void%作者&时间:奔跑在湘边———2016年5⽉6⽇global R BW counter row colzhan = zeros(row*col,2);%创建栈数组pzhan = 1; %栈计数zhan(pzhan,1) = x0;zhan(pzhan,2) = y0;R(x0,y0) = 255;counter = 1;if 8 == modewhile pzhan > 0x1 = zhan(pzhan,1);%出栈y1 = zhan(pzhan,2);pzhan = pzhan - 1; %栈计数减⼀for i = -1 : 1for j = -1 : 1%⽣长准则:判断⽣长点8邻域内像素的各⾃灰度值是否与⽣长点所在像素灰度值相等if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1) R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1; %栈计数增⼀zhan(pzhan,1) = x1 + i;%⼊栈zhan(pzhan,2) = y1 + j;endendendendelseif 4 == modewhile pzhan > 0x1 = zhan(pzhan,1);y1 = zhan(pzhan,2);pzhan = pzhan - 1;for i = -1 : 2 : 1j = 0;if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1)R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1;zhan(pzhan,1) = x1 + i;zhan(pzhan,2) = y1 + j;endendfor j = -1 : 2 : 1i = 0;if x1+i > 0 && x1+i <= row && y1+j > 0 && y1+j <= col && BW(x1+i,y1+j) == BW(x1,y1) && R(x1+i,y1+j) ~= R(x1,y1)R(x1+i,y1+j) = R(x1,y1);counter = counter + 1;pzhan = pzhan + 1;zhan(pzhan,1) = x1 + i;zhan(pzhan,2) = y1 + j;endendendendend三、说明在基于MATLAB7.11.0(R2010b)平台调⽤函数模块fsrRegiongrow时,MATLAB会弹出如下警告??? Maximum recursion limit of 500 reached. Use set(0,'RecursionLimit',N)to change the limit. Be aware that exceeding your available stack space can crash MATLAB and/or your computer.Error in ==> fsrRegiongrow上述警告表⽰递归次数超出了MATLAB默认值,也就是说待处理的感兴趣连通区域像素个数太多(⼤于500),此时⽤户可以尝试通过提⽰的set函数来修改函数递归次数,但是本⽂通过测试发现如果递归次数超出1591时(不同的平台该值可能不同),MATLAB软件会⾃动⽴即关闭。
matlab图像处理基础实例
matlab图像处理基础实例·边缘检测(edge)边缘检测时先要把其他格式图像转化为灰度图像>> f=imread('');>> a=rgb2gray(f);>> [g,t]=edge(a,'canny');>> imshow(g)·剪贴(imcrop)、subplot等imfinfo colormap subimageimadd imsubtract immultiply imdivide imresize imrotate(旋转)>> a=imread('');>> b=imcrop(a,[75 68 130 112]);% I2 = IMCROP(I,RECT)% RECT is a 4-element vector with the form [XMIN YMIN WIDTH HEIGHT]; % subplot(121)⼀⾏两列的显⽰,当前显⽰第⼀个图⽚>> subplot(121);imshow(a);>> subplot(122);imshow(b);·roipoly选择图像中的多边形区域>> a=imread('');>> c=[200 250 278 248 199 172];>> r=[21 21 75 121 121 75];>> b=roipoly(a,c,r);>> subplot(121);imshow(a);>> subplot(122);imshow(b);·roicolor按灰度值选择的区域>> a=imread('');>> i=rgb2gray(a);>> b=roicolor(i,128,255);>> subplot(121);imshow(a);>> subplot(122);imshow(b);·转化指定的多边形区域为⼆值掩膜poly2mask>> x=[63 186 54 190 63];>> y=[60 60 209 204 60];>> b=poly2mask(x,y,256,256); >> imshow(b);>> holdCurrent plot held>> plot(x,y,'b','LineWidth',2)·roifilt2区域滤波a=imread('');i=rgb2gray(a);c=[200 250 278 248 199 172];r=[21 21 75 121 121 75];b=roipoly(i,c,r);h=fspecial('unsharp');j=roifilt2(h,i,b);subplot(121),imshow(i);subplot(122),imshow(j);·roifill区域填充>> a=imread('');>> i=rgb2gray(a);>> c=[200 250 278 248 199 172]; >> r=[21 21 75 121 121 75]; >> j=roifill(i,c,r); >> subplot(211);imshow(i);>> subplot(212);imshow(j);·FFT变换f=zeros(100,100);f(20:70,40:60)=1;imshow(f);F=fft2(f);F2=log(abs(F));imshow(F2),colorbar·补零操作和改变图像的显⽰象限f=zeros(100,100);f(20:70,40:60)=1;subplot(121);imshow(f);F=fft2(f,256,256);F2=fftshift(F);subplot(122);imshow(log(abs(F2)))·离散余弦变换(dct)>> a=imread('');>> i=rgb2gray(a);>> j=dct2(i);>> subplot(131);imshow(log(abs(j))),colorbar >> j(abs(j)<10)=0;>> k=idct2(j);>> subplot(132);imshow(i);>> subplot(133);imshow(k,[0,255]);info=imfinfo('')%显⽰图像信息·edge提取图像的边缘canny prewitt sobelradon函数⽤来计算指定⽅向上图像矩阵的投影>> a=imread('');>> i=rgb2gray(a);>> b=edge(i);>> theta=0:179;>> [r,xp]=radon(b,theta);>> figure,imagesc(theta,xp,r);colormap(hot); >> xlabel('\theta(degrees)'); >> ylabel('x\prime');>> title('r_{\theta}(x\prime)');>> colorbar·filter2均值滤波>> a=imread('');>> i=rgb2gray(a);>> imshow(i)>> k1=filter2(fspecial('average',3),i)/255;%3*3 >> k2=filter2(fspecial('average',5),i)/255;%5*5 >> k3=filter2(fspecial('average',7),i)/255;%7*7 >> figure,imshow(k1)>> figure,imshow(k2)>> figure,imshow(k3)wiener2滤波eg:k=wiener(I,[3,3]))medfilt2中值滤波同上deconvwnr维纳滤波马赫带效应(同等差⾊带条)·减采样>> a=imread('');>> b=rgb2gray(a);>> [wid,hei]=size(b);>> quarting=zeros(wid/2+1,hei/2+1); >> i1=1;j1=1;>> for i=1:2:widfor j=1:2:heiquarting(i1,j1)=b(i,j);j1=j1+1;endi1=i1+1;j1=1;end>> figure>> imshow(uint8(quarting))>> title('4倍减采样')>> quarting=zeros(wid/4+1,hei/4+1); i1=1;j1=1;for i=1:4:widfor j=1:4:heiquarting(i1,j1)=b(i,j);j1=j1+1;endi1=i1+1;j1=1;end>> figure,imshow(uint8(quarting)); title('16倍减采样')结论:在采⽤不同的减采样过程中,其图像的清晰度和尺⼨均发⽣了变化灰度级转化>> a=imread('');>> b=rgb2gray(a);>> figure;imshow(b)>> [wid,hei]=size(b);>> img2=zeros(wid,hei);>> for i=1:widfor j=1:heiimg2(i,j)=floor(b(i,j)/128);endend>> figure;imshow(uint8(img2),[0,2]) %2级灰度图像图像的基本运算>> i=imread('');>> figure;subplot(231);imshow(i);>> title('原图');>> j=imadjust(i,[.3;.6],[.1 .9]);%Adjust image intensity values or colormap图像灰度值或colormap调整% J = IMADJUST(I,[LOW_IN; HIGH_IN],[LOW_OUT; HIGH_OUT])>> subplot(232);imshow(j);title('线性扩展');>> i1=double(i);i2=i1/255;c=2;k=c*log(1+i2);>> subplot(233);imshow(k);>> title('⾮线性扩展');>> m=255-i;>> subplot(234);imshow(m)>> title('灰度倒置')>> n1=im2bw(i,.4);n2=im2bw(i,.7);>> subplot(235);imshow(n1);title('⼆值化阈值')>> subplot(236);imshow(n2);title('⼆值化阈值')图像的代数运算加。
matlab区域生长函数
matlab区域生长函数
MATLAB中的区域生长函数通常用于图像处理,它可以根据预先
设定的条件在图像中自动识别和生长出具有相似特征的区域。
这种
函数可以帮助用户进行分割、特征提取和图像分析等操作。
在MATLAB中,常用的区域生长函数包括`regiongrowing`和
`imsegfmm`等。
`regiongrowing`函数可以根据像素之间的相似性来生长区域。
用户需要提供种子点和生长条件,例如灰度值的相似性或者梯度的
变化等。
该函数会从种子点开始,逐渐将相似的像素加入到区域中,直到满足设定的生长条件为止。
这个函数在处理一些简单的图像分
割任务时非常有用。
另一个常用的区域生长函数是`imsegfmm`,它基于基于快速行
进火焰算法(Fast Marching Method,FMM)进行区域生长。
这个函数可以根据用户提供的种子点和生长条件,利用FMM算法来快速、
高效地生长区域。
它在处理大规模图像和复杂区域分割时具有很好
的效果。
除了这两个函数之外,MATLAB还提供了其他一些用于区域生长
的函数和工具箱,用户可以根据具体的需求选择合适的方法。
在使用区域生长函数时,需要注意调节生长条件、种子点的选择以及对结果进行后处理等步骤,以获得满意的分割效果。
总的来说,MATLAB中的区域生长函数为图像处理提供了强大的工具,可以帮助用户实现自动化的区域分割和特征提取,为后续的图像分析和处理提供了便利。
希望这个回答能够满足你的需求,如果还有其他问题,欢迎继续提问。
python opencv区域生长算法
python opencv区域生长算法摘要:I.简介- 简要介绍Python 和OpenCV- 介绍区域生长算法II.区域生长算法原理- 区域生长算法的定义- 区域生长算法的流程- 区域生长算法的应用场景III.Python 实现区域生长算法- 安装Python 和OpenCV- 实现区域生长算法的代码- 代码的运行结果IV.结论- 总结区域生长算法的优点- 展望区域生长算法在图像处理领域的应用前景正文:I.简介Python 是一种广泛应用于Web 开发、数据分析、人工智能等领域的编程语言,其简洁易读的语法和丰富的库函数受到了广泛的欢迎。
OpenCV (Open Source Computer Vision Library)是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉方面的功能。
区域生长算法是一种常用的图像处理方法,可以用于目标检测、图像分割等领域。
II.区域生长算法原理区域生长算法是一种基于像素相似性的图像分割方法。
它从图像中的一个或多个初始像素点出发,将具有相似性质的像素点逐步合并,形成一个连通的区域。
区域生长算法的流程主要包括以下步骤:1.选择初始像素点或区域2.判断相邻像素点与初始像素点的相似性3.将相似的像素点加入区域4.重复步骤2 和3,直到没有相似的像素点可供加入区域生长算法可以应用于图像分割、目标检测、边缘检测等领域。
III.Python 实现区域生长算法要实现区域生长算法,首先需要安装Python 和OpenCV 库。
可以使用以下命令安装:```pip install opencv-python```接下来,我们可以使用OpenCV 库实现区域生长算法。
以下是一个简单的示例代码:```pythonimport cv2# 读取图像img = cv2.imread("image.jpg")# 转换为灰度图像gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 应用高斯模糊blurred = cv2.GaussianBlur(gray, (5, 5), 0)# 使用Canny 边缘检测edges = cv2.Canny(blurred, 30, 150)# 查找轮廓contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 初始化区域region = []# 遍历轮廓,应用区域生长算法for contour in contours:# 获取轮廓的凸包hull = cv2.convexHull(contour)# 如果凸包非空,将凸包的顶点加入区域if hull.size > 0:region.extend(hull)# 绘制区域result = img.copy()cv2.drawContours(result, [region], 0, (0, 255, 0), 2)# 显示结果cv2.imshow("Result", result)cv2.waitKey(0)cv2.destroyAllWindows()```以上代码首先读取图像,将其转换为灰度图像,并应用高斯模糊和Canny 边缘检测。
open3d区域生长法 python
open3d区域生长法 python区域生长法是一种常用于图像处理和计算机视觉领域的图像分割算法。
它通过基于像素之间的相似度,将图像分割为一组相似的区域,从而提取出感兴趣的目标。
在Python中,我们可以使用Open3D库来实现区域生长法。
区域生长法的基本原理是从种子点开始,逐渐将周围像素添加到区域中,直到满足某个停止准则。
这个停止准则可以是像素的灰度值差异小于某个阈值,或者是区域的大小达到一定的像素数量。
下面是使用Open3D实现区域生长法的示例代码:```import open3d as o3dimport numpy as npdef region_growing(segmentation_threshold, seed_point,point_cloud):# 创建一个空的点云对象region = o3d.geometry.PointCloud()# 创建一个空的点云索引对象indices = []# 将种子点的索引添加到索引列表中indices.append(seed_point)# 将种子点的坐标添加到区域中region.points.append(point_cloud.points[seed_point])# 循环直到索引列表为空while len(indices) > 0:# 获取当前处理的索引current_idx = indices[0]# 获取当前点的坐标current_point = point_cloud.points[current_idx]# 从索引列表中移除当前索引indices.remove(current_idx)# 获取当前点的邻近点[k, idx, _] =point_cloud.tree.search_radius_vector_3d(current_point, segmentation_threshold)# 遍历邻近点for i in range(1, len(idx)):# 如果邻近点没有被访问过if idx[i] not in indices:# 将邻近点的索引添加到索引列表中indices.append(idx[i])# 将邻近点的坐标添加到区域中region.points.append(point_cloud.points[idx[i]]) return region# 读取点云数据point_cloud = o3d.io.read_point_cloud("point_cloud.ply")# 设置区域生长法的阈值参数segmentation_threshold = 0.2# 设置种子点的索引seed_point_index = 500# 执行区域生长法region = region_growing(segmentation_threshold,seed_point_index, point_cloud)# 可视化结果o3d.visualization.draw_geometries([region])```在上述示例代码中,我们首先通过Open3D读取点云数据,并设置区域生长法的阈值参数和种子点的索引。
Matlab实现区域生长算法
Matlab实现区域生长算法〔南京航空航天大学机电学院机械工程系,南京2021年11月1日〕摘要:图像分割不仅是图像处理领域的一个经典的研究主题,也是图像处理技术的热点和焦点。
随着计算机处理技术的开展,图像分割算法引起研究人员越来越多的关注。
本文提出了基于传统的种子区域生长算法的根底上形成一种新的图像自动分割区域的方法。
算法的实现主要基于Matlab编程实现。
关键词:图像分割,种子区域生长算法,Matlab一、引言区域生长是一种古老的图像分割方法,最早的区域生长图像分割方法是由Levine等人提出的。
该方法一般有两种方式,一种是先给定图像中要分割的目标物体内的一个小块或者说种子区域(seed point),再在种子区域根底上不断将其周围的像素点以一定的规那么参加其中,到达最终将代表该物体的所有像素点结合成一个区域的目的;另一种是先将图像分割成很多的一致性较强,如区域内像素灰度值相同的小区域,再按一定的规那么将小区域融合成大区域,到达分割图像的目的,典型的区域生长法如T. C. Pong等人提出的基于小面〔facet〕模型的区域生长法,区域生长法固有的缺点是往往会造成过度分割,即将图像分割成过多的区域。
区域生长是一种串行区域分割的图像分割方法,其优点是根本思想相对简单,通常能将具有相同特征的联通区域分割出来,并能提供很好的边界信息和分割结果。
在没有先验知识可以利用时,可以取得最正确的性能,可以用来分割比拟复杂的图像,如自然景物。
但是,区域生长法是一种迭代的方法,空间和时间开销都比拟大,噪声和灰度不均匀可能会导致空洞和过分割,并在对图像中的阴影效果处理上往往不是很好。
区域生长的根本思想是将具有相似性质的像素集合起来构成区域。
具体先对每个需要分割的区域找一个种子像素作为生长的起点,然后将种子像素周围邻域中与种子像素具有相同或相似性质的像素〔根据某种事先确定的生长或相似准那么来判定〕合并到种子像素所在的区域中。
Mathematica图像处理命令集

1图像处理和分析Mathematica 为现代工业强度的图像处理的编程和互动提供了具有广度和深度的内置支持——完全与Mathematica 强有力的数学和算法功能整合在一起. Mathematica 特有的符号结构和笔记本模式使得视觉形式上的图像可以直接互动和编程操作.构建和导入图像复制, 拖/放—直接复制和粘贴进笔记本里Import—编程导入任意标准格式(TIFF, PNG, JPEG, DICOM, ...) Image—从数据数组中创建图像,表示任意多通道图像Rasterize—将表达式、笔记本或任何Mathematica对象变换成光栅格式CurrentImage—从摄像机或其它设备实时获取图像或录像ImageCapture—打开一个用以获取图像的图形用户界面RandomImage—从符号式分布中创建一个图像图像的表示»ImageData—从图像中摘录光栅数据的阵列ImageDimensions▪ImageChannels▪ImageType▪ImageHistogram▪...Thumbnail—以缩略图形式表现图像基本图像操作»ImageCrop▪ImagePad▪ImageTake▪BorderDimensions▪... ImageResize▪ImageRotate▪ImageReflectImageAdjust—调节水平度、明度、对比度和伽马校正等Sharpen▪Blur▪Lighter▪DarkerImageEffect—特殊图像和照片效果Inpaint—润饰部分图像图像几何»ImageTransformation▪ImagePerspectiveTransformation▪...颜色处理»Colorize▪ColorConvert▪ColorSeparate▪ColorQuantize▪...滤波与邻域处理»ImageFilter▪ImageConvolve▪ImageCorrelateGaussianFilter▪LaplacianFilter▪DerivativeFilterMeanFilter▪MedianFilter▪BilateralFilter▪PeronaMalikFilter▪...MinFilter▪MedianFilter▪GradientFilter▪EntropyFilter▪WienerFilter▪BilateralFilter▪...形态学图像处理»Dilation▪Erosion▪Opening▪Closing▪Thinning▪Pruning▪... DistanceTransform▪TopHatTransform▪HitMissTransform▪...MorphologicalComponents▪MorphologicalPerimeter▪MorphologicalEulerNumber▪...特征检测»EdgeDetect▪ContourDetect▪CrossingDetect▪... ImageKeypoints▪ImageCorrespondingPoints▪CornerFilter▪...Radon▪InverseRadon▪ImageLinesMinDetect▪MaxDetect分割分析Binarize—通过阈值进行分割MorphologicalBinarize▪RegionBinarize▪... WatershedComponents▪ClusteringComponents▪... ComponentMeasurements▪SelectComponents▪...纹理分析ImageCooccurrence—创建纹理共生矩阵图像算术ImageAdd▪ImageSubtract▪ImageDifference▪ImageMultiply▪ImageApply图像的粘贴和合成ImagePartition▪ImageAssemble▪ImageCompose图像的表示和导出ListAnimate▪GraphicsGrid▪TabView▪SlideView▪FlipView▪LabeledExport—将静态和动态图像导出为所有标准显示、网页和印刷格式基于列表的操作»CellularAutomaton—适用一般元胞自动规则Partition▪ArrayFlatten▪Map▪Fourier▪...教程2分割分析Mathematica包括各种图像分割技术,例如:聚类、分水岭、区域生长、和水平集以及一套丰富的用于后处理和分析分割结果的函数.图像的制备ColorQuantize—简化图像中不同颜色的数量FillingTransform—在图像中减少噪声,创建平滑区域GradientFilter, RangeFilter—从一个图像中创建边缘映射FindThreshold▪Threshold▪ImageClip二值分割Binarize—通过设定像素强度阈值进行分割MorphologicalBinarize▪RegionBinarize▪ChanVeseBinarize分割ArrayComponents—找到相同分量MorphologicalComponents—找到形态上连接的分量ImageForestingComponents—使用各种方法进行图像分割ClusteringComponents—基于聚类分析的分割WatershedComponents—基于分水岭方法的分割成分分析ComponentMeasurements—形状与颜色分析SelectComponents▪DeleteSmallComponents▪DeleteBorderComponentsColorize—每部分进行不同地着色3图像滤波和邻域处理Mathematica不仅包括最优化的标准图像处理滤波器,还可以使用它的符号体系以及数学和算法能力来进行任意复杂的滤波和邻域处理策略.线性滤波Blur, Sharpen—一定值域的模糊,锐化GaussianFilter—高斯和高斯导数滤波器GradientFilter▪LaplacianGaussianFilter▪LaplacianFilter▪MeanFilter▪WienerFilterImageConvolve, ImageCorrelate—一般的线性卷积,相关DerivativeFilter—通用阶数的导数滤波器非线性滤波MedianFilter▪MinFilter▪MaxFilter▪CommonestFilter▪RangeFilterEntropyFilter▪StandardDeviationFilter▪HarmonicMeanFilter▪GeometricMeanFilter▪KuwaharaFilter BilateralFilter▪MeanShiftFilterPeronaMalikFilter▪CurvatureFlowFilter非局部滤波ImageDeconvolve▪TotalVariationFilter感兴趣区域处理Masking—指定应用滤波器的图像或图形区域一般的邻域处理ImageFilter—把任意函数应用到像素值模块结构矩阵和卷积内核 »DiskMatrix▪BoxMatrix▪DiamondMatrix▪CrossMatrix▪GaussianMatrix▪...图像的平铺和混合ImagePartition—一个图像划分成一系列子图像ImageAssemble—一系列子图像集合成一个图像ImageCompose—覆盖,混合或组合图像大型数组的处理»ImageData—从图像中提取数据阵列Partition—广义划分ArrayFlatten▪ListConvolve▪ListDeconvolve▪Fourier▪FourierDCTCellularAutomaton—一般的元胞自动机4导入和导出Mathematica自动处理数百种数据格式和子格式——所有这些都同Mathematica统一的符号表达式协调一致. 对于每个特定的格式,Mathematica内外的表示方式间的联系,可以使用Mathematica通用的数据元素机制具体指定任何层次的细节.Import—从文件和网址导入Export—导出数据、图形、表达式到文件中ImportString, ExportString—导入、导出字符串数据SendMail—以邮件形式发出一个表达式、图形、笔记本等CopyToClipboard—复制表达式至系统剪贴板中Paste—粘贴系统剪贴板的内容基本格式»"Table"▪"List"▪"String"▪"Text"▪"Binary"▪...光栅图像格式»"GIF"▪"JPEG"▪"TIFF"▪"PNG"▪"BMP"▪"PICT"▪"WMF"▪"SCT"▪...向量图形格式»"SVG"▪"WMF"▪"EPS"▪"PDF"▪"DXF"▪...三维几何和模型格式 »"PLY"▪"OFF"▪"OBJ"▪"X3D"▪"Maya"▪"POV"▪"LWO"▪"STL"▪...音频格式»"WAV"▪"AIFF"▪"MIDI"▪"SND"▪"FLAC"▪"Wave64"▪...多媒体格式»"AVI"▪"FLV"▪"QuickT ime"▪"SWF"▪...表格与电子数据表格式 »"Table"▪"CSV"▪"TSV"▪"XLS"▪"ODS"▪"SXC"▪...导入和导出数据库格式 »"MDB"▪"DBF"▪"DIF"▪"XLS"▪...科学及医学数据格式 »"HDF"▪"NASACDF"▪"FITS"▪"DICOM"▪"EDF"▪...化学和双分子格式 »"MOL"▪"SDF"▪"SMILES"▪"PDB"▪"GenBank"▪"FASTA"▪...地理空间格式»"SHP"▪"USGSDEM"▪"GTOPO30"▪"SDTS"▪"TIGER"▪"SP3"▪...数值数据格式»"XPORT"▪"MAT"▪"MTX"▪"HarwellBoeing"▪"MPS"▪...数学数据格式»"Graphlet"▪"DOT"▪"GraphML"▪"Graph6"▪"MAT"▪"MTX"▪...文档格式»"CDF"▪"PDF"▪"HTML"▪"NB"▪"RTF"▪"TeX"▪"Text"▪...网页格式»"HTML"▪"GIF"▪"JPEG"▪"SWF"▪"XHTML"▪"X3D"▪...打印格式»"PDF"▪"EPS"▪"TeX"▪"SCT"▪"ACO"▪..."PDF"▪"EPS"▪"TeX"▪"SCT"▪"ACO"▪...XML格式 »"XML"▪"XHTML"▪"MathML"▪"SVG"▪"X3D"▪"ODS"▪...系统和设备格式»"C"▪"Directory"▪"ApacheLog"▪"MBOX"▪"VCF"▪"ICS"▪"RSS"▪...压缩和存档格式»"Base64"▪"BZIP2"▪"GZIP"▪"TAR"▪"UUE"▪"ZIP"▪"WDX"▪...二进制数据»"Bit"▪"Byte"▪"Integer16"▪"Real32"▪"TerminatedString"▪...导出-导入管理$ImportFormats, $ExportFormats—支持格式的列表FileFormat, StringFormat—测试文件、字符串格式底层函数ReadList▪Write▪BinaryReadList▪BinaryWrite5图像表示Mathematica的符号体系允许图像在程序和文档方面具有独特的表示和处理. Mathematica支持具有任意通道和颜色深度的图像以及具有明确指定或自动选择的全部内部数据类型.Image—表示一般的多通道图像或者通过数组生成它ImageQ—测试表达式是否是图像图像光栅ImageData—图像光栅数据的数组ImageDimensions—像素的宽度和高度ImageAspectRatio—图像的高宽比ImageChannels—每一像素的通道数Interleaving—数据阵列是否交错通道ImageValue, PixelValue—指定位置的像素值图像格式ImageType—图像的数据类型(,,,,) ColorSpace—在哪个着色空间解释通道值(, 等)ImageColorSpace—图像的彩色空间(, 等)AlphaChannel—图像的通道颜色处理»ImageHistogram—通道的柱状图FindThreshold—划分强度层的全局阈值ImageCooccurrence—图像像素强度的共生矩阵BinaryImageQ▪Binarize▪ImageLevels▪...图像运算ImageAdd▪ImageSubtract▪ImageDifference▪ImageMultiply▪ImageApply显示和导出选项Options—找出图像的选项ImageSize▪Magnification▪ImageResolution元数据TaggingRules—任意和图像一起导入和导出的元数据导入和导出Import, Export—导入导出各种标准格式6数学形态结合集理论、拓朴和离散数学,数学形态为处理图像和其它离散数据提供有效的途径. Mathematica包括广泛和有效的数学形态的应用,它完全与Mathematica 一般的图像和数据处理相集成.图像准备Binarize—转换图像为黑和白ColorNegate—黑白替换基本操作Dilation▪Erosion▪Opening▪Closing形态变换DistanceTransform▪InverseDistanceTransform▪HitMissTransform▪TopHatTransform▪BottomHatTransformMinDetect▪MaxDetect▪FillingTransform MorphologicalTransform—一般的基于块的二值形态操作MorphologicalGraph—从一个图像的骨架中产生一个图形态分析GeodesicDilation▪GeodesicErosion▪SkeletonTransform▪Thinning▪Pruning▪MorphologicalBranchPoints MorphologicalEulerNumber▪MorphologicalPerimeter MorphologicalComponents—识别连接的分量CornerNeighbors—指定邻近配置的选项分量分析ComponentMeasurements—分量形状与颜色的分析SelectComponents▪DeleteSmallComponents▪DeleteBorderComponentsColorize—对每个分量进行不同着色7科学及医学数据格式Mathematica可以输入各种广泛应用于物理、天文、气象、化学、生物、医学和生理学等领域的文件格式.一般格式"HDF", "HDF5"— NCSA 分层数据格式(.hdf, .h5) "NASACDF"— NASA 普通数据格式(.cdf)"NetCDF"— Unidata 科学数据格式(.nc)天文学数据格式"FITS"— FITS 天文学数据与图像格式(.fit)"SP3"— GPS 和其它卫星轨道(.sp3)医学图像"DICOM"— DICOM 带注释的医学图像(.dcm, .dic)医学与生理学数据格式"Affymetrix"— Affymetrix 数据格式(.cdf, .cel, .chp, .gin, .psi) "BDF"— BioSemi 数据格式(.bdf)"EDF"—欧洲数据格式(.edf)化学和生物分子数据 »"MOL"▪"SDF"▪"SMILES"▪"PDB"▪"GenBank"▪"FASTA"▪...地震数据"NDK"— NDK 地震数据格式(.ndk)气象数据"GRIB"— GRIB 科学数据格式(.grb, .grib)常用元素"Data" —数字或字符串数组"Graphics" —光栅图像"Rules" —所有元素的规则"Elements" —所有可用元素8数据可视化利用许多Wolfram Research 公司开发的原算法,Mathematica提供强大的函数,自动为结构和非结构数据创建受认可的、美观的引人注目的表示方法,不仅仅适用于点、线和面,还有图形和网络.ListPlot—绘制点的列表ListLinePlot—绘制连接点列表的线ListLogPlot▪ListLogLinearPlot▪ListLogLogPlot▪ListPolarPlotListPlot3D—按照三维高度数据列表绘制三维图形ListPointPlot3D—三维散点图ListContourPlot, ListDensityPlot—按照高度值得等高和密度图ListContourPlot3D—三维值域的三维等高面ListCurvePathPlot, ListSurfacePlot3D—从点上再构建曲线和表面ArrayPlot—绘制值或颜色的数组ReliefPlot—绘制具有模拟地势的数组数据MatrixPlot—绘制矩阵值DateListPlot, DateListLogPlot—日期和时间的绘制矢量可视化»ListStreamPlot▪ListStreamDensityPlot▪ListVectorPlot▪ListVectorPlot3D▪...图形可视化GraphPlot—普通图形的布局LayeredGraphPlot—分层次或等级来绘制一个图形TreePlot—绘制树形结构图表和信息可视化 »BarChart▪PieChart▪BubbleChart▪BarChart3D▪...统计可视化»Histogram▪Histogram3D▪QuantilePlot▪BoxWhiskerChart▪...表格数据可视化»Grid▪Row▪Column▪GraphicsGrid▪GraphicsRow▪...离散函数可视化»DiscretePlot—绘制离散值的函数小波可视化»WaveletScalogram▪WaveletListPlot▪WaveletMatrixPlot▪...样式选项»Frame▪PlotStyle▪Filling▪Mesh▪ImageSize▪...注释和组合图形»Tooltip▪StatusArea▪Inset▪...9颜色处理Mathematica提供了方便的函数和算法来处理图像的颜色,对于任意数目的颜色通道具有完全的普遍性..ImageAdjust—调节色阶、亮度、对比度、伽马校正等Lighter▪Darker▪OpacityImageHistogram—各通道的柱状图ImageLevels—在每一通道的标签ColorConvert—颜色空间的转换ColorSeparate, ColorCombine—分开,合并颜色ColorNegate—取消色值Binarize—把图像调节到黑白ColorQuantize—减少图像的调色板AlphaChannel—图像的通道SetAlphaChannel▪RemoveAlphaChannelImageApply—应用任意函数到每个像素值伪彩色图像»Colorize—创建伪彩色图像ReliefImage—从使用仿真的地势数据中创建一个图像ColorData—大量有用的配色方案数据颜色»RGBColor▪GrayLevel▪Hue▪Red▪Blend▪ColorSlider▪...图像表示»ImageData▪ImageChannels▪ImageType▪ColorSpace▪... 10基本的图像处理Mathematica 的符号体系使图像的处理成为可能,就像是表达式的其它形式——可以应用函数于图像,在笔记本中显示和输入以及直接包括它们在程序中.Mathematica提供流线型系列函数做基本图像处理,集成了更先进的处理、综合语言和交互能力.结构操作ImageCrop—按给定尺寸修剪或去除边界ImageTrim—删除边界,包括制定的像素ImagePad—用多种可能的方法填补图像ImageTake—按图像像素的行和列取出图像BorderDimensions—使用各种方法找到图像的边界几何操作ImageResize—通过光栅重新采样调整图像大小ImageRotate▪ImageReflect基本图像处理ImageAdjust—调整灰度、明亮度、对比度、等ImageClip—剪辑像素值Sharpen▪Blur▪Lighter▪DarkerImageEffect—特殊的图像和摄影效果通道处理AlphaChannel—一个图像的通道SetAlphaChannel▪RemoveAlphaChannelImageCompose—合成图像运算ImageAdd▪ImageSubtract▪ImageDifference▪ImageMultiply▪ImageApply阵列层处理»ImageData—提取图像的原始数据阵列Image—通过数据阵列生成图像Take▪Drop▪Transpose▪Clip▪Chop▪Threshold▪ArrayFlatten▪...PET/CT示踪剂18F-FDG(氟代脱氧葡萄糖)氟代脱氧葡萄糖氟代脱氧葡萄糖是2-脱氧葡萄糖的氟代衍生物。
matlab regiongrowing函数源码

matlab regiongrowing函数源码引言概述:
Matlab是一种广泛应用于科学计算和工程领域的编程语言和开发环境。
其中,regiongrowing函数是Matlab中用于图像分割的重要函数之一。
本文将详细介绍regiongrowing函数的源码,并解释其实现原理和应用。
正文内容:
1. regiongrowing函数的功能
1.1 基本功能
1.2 扩展功能
2. regiongrowing函数的实现原理
2.1 区域生长算法
2.2 阈值选择策略
2.3 邻域定义
3. regiongrowing函数的应用
3.1 图像分割
3.2 特定区域提取
3.3 目标检测
4. regiongrowing函数的使用示例
4.1 函数调用
4.2 参数设置
4.3 结果展示
5. regiongrowing函数的优化方法
5.1 并行计算
5.2 邻域优化
5.3 阈值自适应
总结:
在本文中,我们详细介绍了Matlab中的regiongrowing函数的源码,包括其功能、实现原理、应用和优化方法。
regiongrowing函数在图像分割、特定区域提取和目标检测等领域具有广泛的应用。
通过合理设置参数和优化算法,可以提高函数的效率和准确性。
希望本文对读者理解和使用regiongrowing函数有所帮助。
区域生长算法原理及MATLAB实现

区域⽣长算法原理及MATLAB实现1. 基于区域⽣长算法的图像分割原理数字图像分割算法⼀般是基于灰度值的两个基本特性之⼀:不连续性和相似性。
前⼀种性质的应⽤途径是基于图像灰度的不连续变化分割图像,⽐如图像的边缘。
第⼆种性质的主要应⽤途径是依据实现指定的准则将图像分割为相似的区域。
区域⽣长算法就是基于图像的第⼆种性质,即图像灰度值的相似性。
1.1 基本公式令R表⽰整幅图像区域,那么分割可以看成将区域R划分为n个⼦区域R1,,R2,......Rn的过程,并需要满⾜以下条件:a: U(Ri) = R;b: Ri是⼀个连通区域,i=1,2,3,......n;c: Ri ∩ Rj = 空集,对于任何的i,j;都有i≠j;d: P(Ri) = Ture, 对i=1,2,......n;e: R(Pi U Rj) = False, i≠j;正如“区域⽣长”的名字所暗⽰的:区域⽣长是根据⼀种事先定义的准则将像素或者⼦区域聚合成更⼤区域的过程,并且要充分保证分割后的区域满⾜a~e的条件。
1.2 区域⽣长算法设计思路区域⽣长算法的设计主要由以下三点:⽣长种⼦点的确定,区域⽣长的条件,区域⽣长停⽌的条件。
种⼦点的个数根据具体的问题可以选择⼀个或者多个,并且根据具体的问题不同可以采⽤完全⾃动确定或者⼈机交互确定。
区域⽣长的条件实际上就是根据像素灰度间的连续性⽽定义的⼀些相似性准则,⽽区域⽣长停⽌的条件定义了⼀个终⽌规则,基本上,在没有像素满⾜加⼊某个区域的条件的时候,区域⽣长就会停⽌。
在算法⾥⾯,定义⼀个变量,最⼤像素灰度值距离reg_maxdist.当待加⼊像素点的灰度值和已经分割好的区域所有像素点的平均灰度值的差的绝对值⼩于或等于reg_maxdist时,该像素点加⼊到已经分割到的区域。
相反,则区域⽣长算法停⽌。
在种⼦店1的4邻域连通像素中,即2、3、4、5点,像素点5的灰度值与种⼦点的灰度值最接近,所以像素点5被加⼊到分割区域中,并且像素点5会作为新的种⼦点执⾏后⾯的过程。
matlab区域生长代码
本文使用matlab编了一个程序,实现区域生长。
具体思路是这样的:从灰度图像中取一点作为种子(其实程序略微修改就可实现多个种子点生长,但个人觉得不是很必要),记为P(i,j)。
然后,按P点的上->右->下->左->上……的顺序一层一层地生长出去。
没一层距离P的距离分别记为a,b,c,d,没生长一次,a,b,c,d的值加1,并在下一层生长前判断是否到达图像边界(注意是边界不是边缘),直到生长完成。
话不多说,具体程序如下:%区域生长法分割图像。
每轮生长都是由上到下,从左到右map1=imread('picturename.jpg');[m,n,dep]=size(map1); %行,列,深度值A=zeros(m,n);%灰度化for i=1:mfor j=1:nA(i,j)=0.11*map1(i,j,1)+0.59*map1(i,j,2)+0.3*map1(i,j,3);endend%灰度化完成,输出灰度图figure(1)imshow(A,[])title('原始灰度图像')B=zeros(m,n); %存储输出图像fprintf('请取一个目标点,结束后回车\n')[x1,y1]=getpts; %获得区域生长起始点i=round(x1); %横坐标取整j=round(y1); %纵坐标取整seed=A(i,j)B(i,j)=255; %种子点提取T=input('请输入生长阈值T(0<T<255)\n')a=1;b=1;c=1;d=1; %四个方向的计数器h=0;while a<i||b<=n-j||c<=m-i||d<j %有一侧没到边界,继续生长%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%以下为上侧生长程序while a<i %a<i,只执行一次(用break来保证)mina=max(j-a,1);maxa=min(j+a,n); %找出两侧端点,此时只需考虑列for k=mina:maxaif k==mina %若为左端点if B(i-a+1,k)==255||B(i-a+1,k+1)==255 %且下或右下存在种子,进行下面的判断if abs(A(i-a,k)-seed)<TB(i-a,k)=255;elseB(i-a,k)=0;endendelse if k==maxa %若为右端点if B(i-a,k-1)==255||B(i-a+1,k-1)==255||B(i-a+1,k)==255 %且左或左下或下存在种子,进行下面的判断if abs(A(i-a,k)-seed)<TB(i-a,k)=255;elseB(i-a,k)=0;endendelse %k不为端点,则需检测左、左下、下和右下ifB(i-a,k-1)==255||B(i-a+1,k-1)==255||B(i-a+1,k)==255||B(i-a+1,k+1)==255 %左下、下或右下存在种子,则进行下面的判断if abs(A(i-a,k)-seed)<TB(i-a,k)=255;elseB(i-a,k)=0;endendendendenda=a+1;break;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%上侧完成一次生长,以下为右侧生长程序while b<=n-jminb=max(i-b,1);maxb=min(i+b,m); %找出两侧端点,此时则只需考虑行for k=minb:maxbif k==minb %若为上端点if B(k,j+b-1)==255||B(k+1,j+b-1)==255 %且左或左下存在种子,进行下面的判断if abs(A(k,j+b)-seed)<TB(k,j+b)=255;elseB(k,j+b)=0;endendelse if k==maxb %若为下端点if B(k-1,j+b)==255||B(k-1,j+b-1)==255||B(k,j+b-1)==255 %且左或左上或上存在种子,进行下面的判断if abs(A(k,j+b)-seed)<TB(k,j+b)=255;elseB(k,j+b)=0;endendelse %k不为端点,则需检测上、左上、左和左下ifB(k-1,j+b)==255||B(k-1,j+b-1)==255||B(k,j+b-1)==255||B(k+1,j+b-1)==255 %左下、下或右下存在种子,则进行下面的判断if abs(A(k,j+b)-seed)<TB(k,j+b)=255;elseB(k,j+b)=0;endendendendendb=b+1;break;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%右侧完成一次生长,以下为下侧生长程序while c<=m-i %a<i,只执行一次(用break来保证)minc=max(j-c,1);maxc=min(j+c,n); %找出两侧端点,此时只需考虑列for k=minc:maxcif k==mina %若为左端点if B(i+c-1,k)==255||B(i+c-1,k+1)==255 %且上或右上存在种子,进行下面的判断if abs(A(i+c,k)-seed)<TB(i+c-1,k)=255;elseB(i+c-1,k)=0;endendelse if k==maxc %若为右端点if B(i+c,k-1)==255||B(i+c-1,k-1)==255||B(i+c-1,k)==255 %且左或左上或上存在种子,进行下面的判断if abs(A(i+c,k)-seed)<TB(i+c,k)=255;elseB(i+c,k)=0;endendelse %k不为端点,则需检测左、左上、上和右上ifB(i+c,k-1)==255||B(i+c-1,k-1)==255||B(i+c-1,k)==255||B(i+c-1,k+1)==255 %左、左上、上或右上存在种子,则进行下面的判断if abs(A(i+c,k)-seed)<TB(i+c,k)=255;elseB(i+c,k)=0;endendendendendc=c+1;break;end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%下侧完成一次生长,以下为左侧生长程序while d<jmind=max(i-d,1);maxd=min(i+d,m); %找出两侧端点,此时则只需考虑行for k=mind:maxdif k==mind %若为上端点if B(k,j-d+1)==255||B(k+1,j-d+1)==255 %且右或右下存在种子,进行下面的判断if abs(A(k,j-d)-seed)<TB(k,j-d)=255;elseB(k,j-d)=0;endendelse if k==maxd %若为下端点if B(k-1,j-d)==255||B(k-1,j-d+1)==255||B(k,j-d+1)==255 %且上或右上或右存在种子,进行下面的判断if abs(A(k,j-d)-seed)<TB(k,j-d)=255;elseB(k,j-d)=0;endendelse %k不为端点,则需检测上、右上、右和右下ifB(k-1,j-d)==255||B(k-1,j-d+1)==255||B(k,j-d+1)==255||B(k+1,j-d+1)==255 %上、右上、右或右下存在种子,则进行下面的判断if abs(A(k,j-d)-seed)<TB(k,j-d)=255;elseB(k,j-d)=0;endendendendendd=d+1;break;endh=h+1;endfigure(2)imshow(B,[])title('区域生长分割后图像')。
基于子块的区域生长的彩色图像分割算法

滑得到像素 的颜色 ( , b) a, 。
22 提 取 象素 纹理 特征 .
图像纹理是一个 图像像素的邻域性质 , 具体 表现 为图像像 素某邻域 内灰度或者颜色的某种变化 , 它在本质 上依 赖于所观
维普资讯
C m u rE gn ei n p l ai s计算机工程 与应用 o p t nier g adA pi t n e n c o
基于子块 的区域 生长 的彩色 图像分割算 法
金 军
JN J n I u
四川大学 汁算机 学院 , 成都 6 0 6 10 5
摘
要 : 出了一种基 于图像子块 的区域 生长算法 , 用于彩 色图像 分割。首先将 图像 划分成 多个不重 叠子块 , 提 应 然后利 用从 CE I
L a b 色空间中提取 出的每个子块的颜 色和纹理特征 , ** 颜 先进行子块 内颜 色聚类 , 达到 子块分类的 目的 , 再根据 生长准则进行基 于分 类子块的 区域 生长 , 实现对 自然彩 色图像 的分割。 实验结果证 明 了算法的有效性 , 分割结果符合人 的主观 感知 。
C l g f Co u e c e c , ih a U ie st C e g u 6 0 6 C i a ol e o mp tr S i n e S e u n n v ri e y, h n d 1 0 5, h n
J N u I J mCoo m a e s g e t t n ag rt m a e n s b bo k r g0 r wigCo u e gn e i n piain . lr i g e m na i lo i o h b s d o u - lc e in g o n . mp tr En ie rng a d Ap l t s c o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I=imread('C:\Users\XIAOKUNKUN\Desktop\图5.jpg');
imshow(I);
I=double(I);
[M,N,H]=size(I);
[y,x]=getpts; %获得区域生长起始点
x1=round(x); %横坐标取整
y1=round(y); %纵坐标取整
I(x1,y1,1)=255;
I(x1,y1,2)=0;
I(x1,y1,3)=0;
Y=zeros(M,N,H); %作一个全零与原图像等大的图像矩阵Y,作为输出图像矩阵suit=1; %储存符合区域生长条件的点的个数
count=1; %记录每次判断一点周围八点符合条件的新点的数目
while count>0
s=0; %记录判断一点周围八点时,符合条件的新点的灰度值之和
count=0;
for m=1:M
for n=1:N
r=I(m,n,1); %将此像素的R分量赋给r;
g=I(m,n,2); %将此像素的G分量赋给g;
b=I(m,n,3);
X=2-sqrt(r.^2+g.^2+b.^2)/sqrt(13619);
Y=(r*109+g*37+b*13)/sqrt(r^2+g^2+b.^2)/sqrt(13619);
d1=X-0.754;
d2=Y-0.96;
if (I(x1,y1,1)==255&&I(x1,y1,2)==0&&I(x1,y1,3)==0)
if (m-1)>0 && (m+1)<(M+1) && (n-1)>0 && (n+1)<(N+1) %判断此点是否为图像边界上的点
for u= -1:1 %判断点周围八点是否符合域值条件
for v= -1:1 %u,v为偏移量
if (d1>=0&&d2>=0)%判断是否未存在于输出矩阵Y,并且为符合域值条件的点I(m+u,n+v,1)=255;
I(m+u,n+v,2)=0;
I(m+u,n+v,3)=0;
count=count+1;
end
end
end
end
end
end
end
suit=suit+count; %将n加入符合点数计数器中
end
imshow(Y);。