基于PC与ATmega128单片机的室内服务机器人控制系统设计
ATmega128 单片机硬件电路设计
ATmega128 单片机硬件电路设计在本系统中,本小节主要讲ATmega128 单片机的内部资源、工作原理和硬件电路设计等。
2.5.1 ATmega128 芯片介绍ATmega128 为基于AVR RISC 结构的8 位低功耗CMOS 微处理器。
片内ISP Flash 可以通过SPI 接口、通用编程器,或引导程序多次编程。
引导程序可以使用任何接口来下载应用程序到应用Flash 存储器。
通过将8 位RISC CPU 与系统内可编程的Flash 集成在一个芯片内,ATmega128 为许多嵌入式控制应用提供了灵活而低成本的方案。
ATmega128 单片机的功能特点如下:(1)高性能、低功耗的AVR 8 位微处理器(2)先进的RISC 结构①133 条指令大多数可以在一个时钟周期内完成② 32x8 个通用工作寄存器+外设控制寄存器③全静态工作④工作于16 MHz 时性能高达16 MIPS ⑤只需两个时钟周期的硬件乘法器(3)非易失性的程序和数据存储器① 128K 字节的系统内可编程Flash ②寿命: 10,000 次写/ 擦除周期③具有独立锁定位、可选择的启动代码区(4)通过片内的启动程序实现系统内编程① 4K 字节的EEPROM ② 4K 字节的内部SRAM ③多达64K 字节的优化的外部存储器空间④可以对锁定位进行编程以实现软件加密⑤可以通过SPI 实现系统内编程(5)JTAG 接口(与IEEE 1149.1 标准兼容)①遵循JTAG 标准的边界扫描功能②支持扩展的片内调试③通过JTAG 接口实现对Flash,EEPROM,熔丝位和锁定位的编程(6)外设特点①两个具有独立的预分频器和比较器功能的8 位定时器/ 计数器②两个具有预分频器、比较功能和捕捉功能的16 位定时器/ 计数器③具有独立预分频器的实时时钟计数器④两路8 位PWM ⑤ 6 路分辨率可编程(2 到16 位)的PWM ⑥输出比较调制器⑦ 8 路10 位ADC ⑧面向字节的两线接口⑨两个可编程的串行USART ⑩可工作于主机/ 从机模式的SPI 串行接口(7)特殊的处理器特点①上电复位以及可编程的掉电检测②片内经过标定的RC 振荡器③片内/ 片外中断源④ 6 种睡眠模式: 空闲模式、ADC 噪声抑制模式、省电模式、掉电模式、Standby 模式以及扩展的Standby 模式⑤可以通过软件进行选择的时钟频率⑥通过熔丝位可以选择ATmega103 兼容模式⑦全局上拉禁止功能ATmega128 芯片有64 个引脚,其中60 个引脚具有I/O 口功能,资源比较丰富,下面对ATmega128 的各个引脚做简单介绍:VCC:数字电路的电源。
基于mega128单片机简易智能机器人的设计
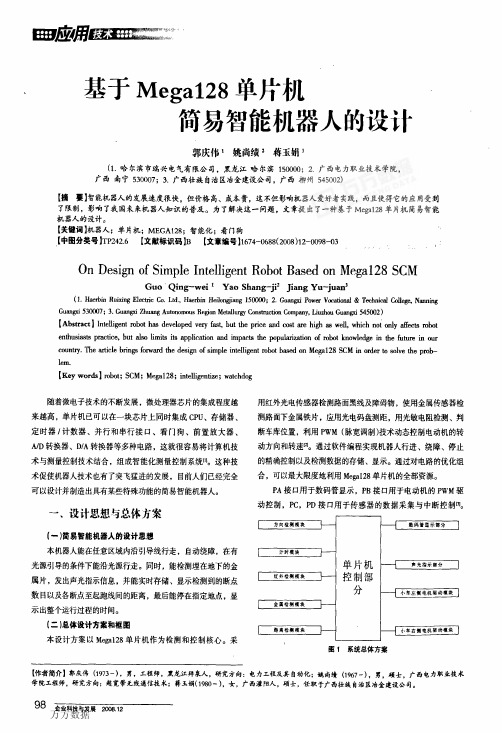
基于Megal28单片机简易智能机器人的设计郭庆伟t姚尚绩2蒋玉娟3(1.哈尔滨市瑞兴电气有限公司,黑龙江哈尔滨150000;2.广西电力职业技术学院,广西南宁530007;3.广西壮族自治区冶金建设公司,广西柳州545002)【摘要】智能机器人的发展速度很快。
但价格高、成本贵,这不但影响机器人爱好者实践,而且使得它的应用受到了限制,影响了我国未来机器人知识的普及。
为了解决这一问题,文章提出了一种基于Megal28单片机简易智能机器人的设计。
【关键词】机器人;单片杌;MEGAl28;智能化;看门狗【中圉分类号】TP242.6【文献标识码】B【文章编号】1674一0688(2008)12一0098一03OnDesignofSimpleInteⅡigentRobotBasedonMegal28SCMGuoQing—weiYaoshang.ji2JiangYu-juan3(1.Hae小illRui五IlgElec翻cCo.Ltd-,HaerbinHeik嚏l舒iang150000;2.Gu卸鲥P0w盯Voc“onal&‰hnicalCoHe萨,N删ingGuaII咖530007;3.GuaIl鲥Zhu锄gAutonomousRe西0nMetallur舒C0ng协lctionComp粕y’“uz}l叭Gu帅gxi545002)【Abstract】Inteuigentroboth鹊developedveryf缸t,buttlleprice趴dcosthi曲鹪wen,whichnotonly胡.酏tsmbotentllusiastspractice,butals0limitsits印plication蚰dimpactstlIepopu场zationofrobotknowledgeintIlefIltu弛incountry.Thearticlebrin铲f0刑ardt王Iedes咖ofsimpIeinteⅡigentrobotbased蚰Megal28SCMiIlordert0soIvetllepmb—lem.【Keywords】robot;scM;Megal28;inteⅡigentize;waIchdog随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成cPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D,A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统【ll。
基于ATmega128单片机的无人机飞行控制系统的设计

收稿日期:2006-07-03作者简介:袁少强(1960—),男,硕士生导师,在职博士,主要研究方向为计算机控制和工业过程控制;胡金辉(1979—)男,河北保定人,硕士研究生,主要研究方向为无人机导航与飞控系统。
基于AT mega128单片机的无人机飞行控制系统的设计袁少强,胡金辉(北京航空航天大学自动化科学与电气工程学院,北京 100083)摘要:通过分析无人机飞行控制系统的工作原理以及对飞控计算机功能的需求,给出了基于ATmega128单片机的无人机飞行控制系统的硬件平台设计方法。
本系统具有功能全、体积小、重量轻、功耗低、集成度高等特点,非常适合应用于小型无人机。
关键词:ATm ega128单片机;飞行控制;J TAG ;无人机中图分类号:TP391.8;V 249.1 文献标识码:A 文章编号:1000-8829(2007)02-0044-03D esign of F li ght Control Syste m for UAV Based on ATm ega 128M CUYUAN Shao -qiang 牞HU Jin -hui牗S choo l ofAu t o m ation Sci ence &E lectri calEng i neeri ng 牞B ei hang Un iversit y 牞Beiji ng 100083牞Ch i na 牘Ab strac t 牶By ana l y zi ng t he princ i p l e of UAV 牗un m anned air vehic l e 牘flight con tro l s y st em and the f unction require m ent for fligh t contro l computer 牞t he ha rd w are p l a tfor m desi gn m e t hod of UAV s fli ght contro l sy ste m based on the A Tmega128M CU is g iven .The w ho l e syste m takes on charac teristics o f va ri ous of func tions 牞s m a ll vo l u m e 牞little w eight 牞low consu m pti on and hi gh integrati on 牞and it suits fo r app l y i ng t o s m a ll UAV.K ey word s 牶ATmega128M CU 牷flight contro l 牷J TAG 牷UAV 无人驾驶飞机从20世纪30年代就开始使用,目前已广泛应用于军事和民用领域,如军事侦察、航空摄影、森林防火、微波中继和高压巡线等。
基于单片机的智能家居控制系统设计

基于单片机的智能家居控制系统设计智能家居控制系统是指利用各种先进的技术手段,通过智能化的方式对居家环境进行全面管理和控制,从而为居住者提供更加便捷、舒适和安全的生活体验。
基于单片机的智能家居控制系统是目前比较常见的一种应用方案。
本文将就基于单片机的智能家居控制系统进行介绍和设计。
在智能家居控制系统中,单片机作为智能控制主体,扮演着至关重要的角色。
它通过自身的输入输出接口和相应的程序算法,能够实现与各种传感器、执行器及通信模块的连接和数据交换,从而实现对家居设备的智能化控制。
具体来说,基于单片机的智能家居控制系统设计一般包括以下几个方面:1. 传感器模块:用于感知家居环境的温度、湿度、光照、烟雾等信息,并将这些信息通过单片机进行处理和分析。
2. 执行器模块:包括控制灯光、空调、窗帘、插座等各种家居设备的开关状态,实现对这些设备的远程控制。
3. 通信模块:通过网络通信技术,实现家居控制系统与用户手机、电脑等智能终端设备之间的无线连接和数据传输。
4. 控制算法:基于单片机的智能家居控制系统需要设计相应的控制算法,用于处理传感器模块采集到的数据,并实现对执行器模块的智能控制。
1. 硬件设计:基于单片机的智能家居控制系统的硬件设计方案,可以采用常见的单片机开发板作为控制核心,再通过扩展模块来实现各种传感器和执行器的连接。
比较常见的单片机型号包括STM32系列、Arduino系列、ESP8266系列等。
传感器模块可以选择温湿度传感器、光敏传感器、烟雾传感器等,执行器模块可以包括继电器、电机驱动模块、智能插座等。
通信模块可以选择WiFi模块、蓝牙模块或者LoRa模块,用于实现家居控制系统与用户终端设备的无线连接。
2. 软件设计:基于单片机的智能家居控制系统的软件设计主要包括单片机程序的编写和控制算法的实现。
单片机程序需要能够实现与传感器和执行器模块的通信、数据采集和控制指令发送。
控制算法可以通过采集到的传感器数据进行温度控制、湿度控制、照明控制等功能,也可以实现定时控制、远程控制、自动化控制等高级功能。
(人工智能)基于单片机智能机器人控制系统研究设计

(人工智能)基于单片机智能机器人控制系统研究设计基于单片机智能机器人控制系统研究设计引言单片机技术作为自动控制技术的核心之壹,被广泛应用于工业控制、智能仪器、机电产品、家用电器等领域。
随着微电子技术的迅速发展,单片机功能也越来越强大,本设计基于单片机技术、红外技术完成智能机器人控制系统设计。
智能机器人研究于当前机器人研究领域具有十分突ft的地位,其显著的特点是具有环境感知、判断决策、人机交互等功能[1]。
本智能机器人系统主要实现了步行、跟踪、避障、步伐调整、语音、声控、液晶显示,地面探测等功能。
于遇到外界条件发生变化时,该机器人将采取不同的措施对待,较好地表现ft该机器人的思考能力。
1智能机器人简介1.1系统框图该智能机器人控制系统采用俩片AT89C51[2]控制,壹片单片机MCU1用于整个系统的控制,另壹片单片机MCU2用于驱动液晶屏LCM1602工作,它们之间通过I/O 口通讯,以实现俩片单片机共同工作的相互协调控制。
系统框图[3]如图1所示。
图1机器人控制系统结构图设计中,MCU1的P1.0、P1.3分别接触觉传感器,P1.6-P1.7接视觉红外传感器,P2.0-P2.4口控制继电器驱动电路,P2.5口接地面探测传感器,P2.6-P2.7接步伐校正光耦器,P3.0-P3.5接ISD25120语音芯片。
1.2实现功能机器人于移动过程中,会发ft语音提示:“目标搜索中”,同时液晶显示:“Targetisinsearching”;前进过程中发现目标,语音提示:“发现目标”;液晶显示:“Findobject”,机器人自动向该目标转向;对准目标后,语音提示:“锁定目标”,液晶显示:“Lockit”,同时机器人向目标继续前进;如机器人撞上目标,语音提示:“前方有障碍物”,液晶显示:“Obstaclesimpending”,机器人根据触角碰撞的先后顺序,向该相反的方向转角约100度,继续前进;当前方地面ft现断层,语音提示:“危险,前方地面有断层”,液晶显示:“Warning,faultahead”,同时机器人会向后退几步,转向后继续前进;如果机器人于转向过程中,步伐错乱,便会自动执行步伐调整程序,以校正步伐。
基于ATmega128单片机的无人机飞行控制系统的设计
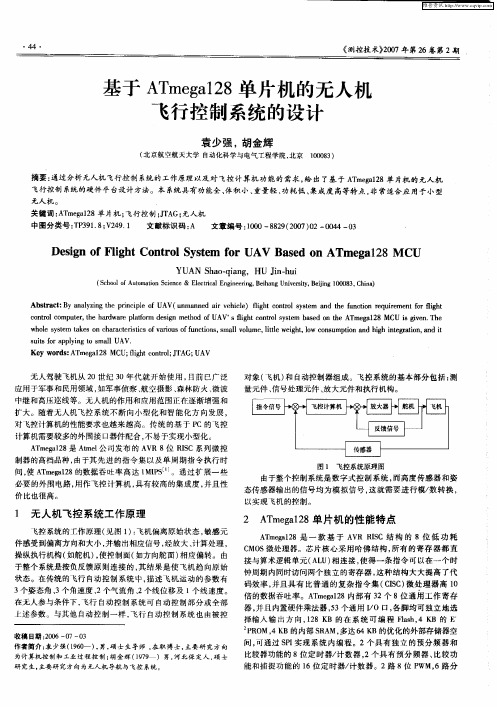
图 1 飞控 系统原理图
由于整个 控制系统是数 字式控 制系统 , 而高度传感 器和 姿 态传感器 输出的信号均 为模 拟信号 , 这就需 要进行 模/ 数转 换 , 以实 现飞机的控制 。
1 无人机 飞控 系统 工作原理
飞控 系统 的工作原理 ( 图 1 : 见 )飞机偏离原始状 态 , 元 敏感
无人 机 。
关键 词 :T ea2 A m g18单 片机 ; 飞行控制 ;T G; J A 无人机 中图分 类 ̄ :P 9 . ; 2 9 1 -T 3 18 V 4 , 文献标识码 : A 文章编号 :0 0—82 ( 07 0 0 4 0 10 89 2 0 ) 2— 0 4— 3
维普资讯
・
4 4・
《 测控技 术) 0 7年第 2 第 2期 )0 2 6卷
基于 A m g18单 片机 的无人机 T ea2 飞行控制 系统的设 计
袁 少强 , 胡金辉
( 京航空航天 大学 自动化科学与电气工程学院 , 北 北京 10 8 ) 0 0 3
s i o p li g t malUA u t fr a py n o s l s V.
Ke r s A me a 2 U; ih o t lJ G; ywo d : T g 1 8 MC f g tcnr ;TA UAV l o
无人驾驶 飞机从 2 O世纪 3 O年 代就开 始使用 , 目前 已广 泛 应用于军事和 民用领域 , 如军事侦察 、 航空摄影 、 森林 防火 、 微波
De in o l h n r lS se f r UAV s d o sg fF i tCo to y tm o g Ba e n ATme a 8 M CU g 1 2
基于单片机的自动化控制系统设计和实现

基于单片机的自动化控制系统设计和实现随着科技的不断发展,自动化控制系统越来越成为人们生产和生活中的必需品。
而基于单片机的自动化控制系统,由于其稳定性、可靠性、便携性等特点,也越来越被人们所重视。
在本文中,我将介绍一个基于单片机的自动化控制系统的设计和实现的过程。
一、概述该自动化控制系统采用ATmega328P单片机作为控制核心,具有8个输入输出端口,可控制8个外设设备的启动和停止,其中包括电机、电磁阀、蜂鸣器等。
系统还集成了温湿度传感器、红外遥控器等模块,可实现对温度、湿度的实时监测,同时支持遥控器对设备的控制。
该系统能够实现自动化控制和远程控制的功能,具有很高的实用性。
二、硬件设计该系统的硬件设计采用了ATmega328P单片机,该单片机具有8个输入输出端口,可控制外设设备的启动和停止。
同时,为了实现对环境的实时监测,系统还集成了温湿度传感器,具有较高的精度和稳定性。
在硬件设计过程中,我们需要注意以下几个方面:1.电压稳定:由于单片机工作时需要稳定的电压,因此需要提供稳定的电源,以防止设备运行过程中因电压不稳定而导致系统崩溃。
2.元器件的选择:在硬件设计中,我们需要选择质量稳定、品质有保证的元器件,以确保系统的稳定性和可靠性。
3.连线的检查:在连线过程中,需要实时检查连线是否正确,以避免因误接、漏接等情况导致系统无法正常工作。
三、软件设计在软件设计中,我们需要编写一份程序来实现控制模块的功能。
程序中需要实现控制算法、温湿度传感器的读取、数据存储和远程控制等功能。
以下是该系统的软件流程:1.初始化:对控制模块进行初始化的操作,包括控制端口初始化、温湿度传感器初始化等。
2.读取传感器数据:读取温湿度传感器所监测的温度和湿度值。
3.数据处理:对传感器读取的数据进行处理,通过控制算法计算出需要控制的设备的开启时间和关闭时间。
4.设备控制:按照计算出的开启时间和关闭时间,对设备进行控制。
5.数据存储:将读取的温湿度数据存储到存储器中。
AVR ATmega128全功能工业控制器设计文档说明书
AVR单片机的全功能工业控制器设计吴焕琅深圳市中天越华自动控制科技有限公司摘要:介绍一款工业级的实用全功能控制器。
该控制器能隔离采集多种输入信号,输出多种控制信号;具有实时时钟、历史数据存储功能,彩色液晶显示界面,带有触摸屏操作和远程通信接口。
核心部分CPU采用AVR ATmega128单片机。
目前已用于批量生产。
关键词:隔离采集控制单片机彩色显示485接口ATmega128DS1642引言在自动控制产品的设计过程中,实现方案的选择常常是很矛盾的。
使用可编程逻辑控制器(PLC)和人机界面(HMI)来实现,开发速度较快,但成本太高,所开发的产品没有市场竞争力;使用单片机开发,成本低但开发周期长、开发量大且通用性不好。
用户需要的是一种成本低、开发周期较短、通用性较好的控制器,因此全功能工业控制器有很大的应用市场。
全功能工业控制器的整个电路分为信号隔离输入部分、控制器输出部分、实时时钟与历史数据存储部分、彩色液晶显示和触摸屏控制部分、通信接口等。
1信号隔离输入电路信号隔离输入电路分为开关量隔离输入、模拟量隔离输入、高速电脉冲隔离输入,电路如图1所示,开关量的隔离输入较为简单,输入信号采用光耦进行隔离后送入单片的普通I/O,单片机用查询方式进行采集。
图1信号隔离输入电路高速电脉冲的采集需要注意的是,所设计的电路必须适应高速信号采集的要求,因此隔离光耦应采用高速光耦(如6N137等)。
采用查询方式采集高速脉冲容易造成采集数据的丢失,高速脉冲应采用中断方式进行采集。
模拟量隔离采集是本控制器的一个重点和难点,笔者之前采用了线性光耦等多种方式进行模拟量的隔离采集实验,均未获满意的效果。
这里采用一种先将模拟量数字化(使用AD7705),然后通过有光耦隔离的数据口送到CPU进行模拟量隔离采集的方式,效果理想。
2控制器输出电路控制器的输出方式有继电器输出、晶体管输出、模拟电压输出,如图2所示。
继电器输出和晶体管输出电路较为简单,这里不作详细的介绍。
基于C的智能机器人控制系统设计与实现

基于C的智能机器人控制系统设计与实现智能机器人作为人工智能领域的重要应用之一,其控制系统设计与实现是保证机器人正常运行和完成任务的关键。
本文将介绍基于C语言的智能机器人控制系统设计与实现过程,包括系统架构设计、传感器数据处理、决策算法实现等内容。
一、系统架构设计智能机器人的控制系统通常包括感知、决策和执行三个模块。
感知模块负责获取环境信息,包括传感器数据的采集和处理;决策模块根据感知到的信息进行决策,确定机器人下一步的动作;执行模块负责执行决策,控制机器人的运动。
在基于C语言的设计中,可以采用面向对象的方法,将每个模块抽象成一个类,通过类之间的交互实现整个系统的功能。
二、传感器数据处理传感器是智能机器人获取外部环境信息的重要途径,包括摄像头、激光雷达、红外传感器等。
在C语言中,可以通过调用相应的库函数或者编写驱动程序来实现对传感器数据的采集和处理。
例如,可以使用OpenCV库来处理摄像头图像,使用GPIO库来读取红外传感器数据。
三、决策算法实现决策算法是智能机器人控制系统中最核心的部分,它决定了机器人在不同情况下应该采取什么样的行动。
常见的决策算法包括路径规划算法、目标跟踪算法等。
在C语言中,可以根据具体任务需求选择合适的算法进行实现,并结合传感器数据进行综合分析,最终生成机器人的行动指令。
四、实时性与稳定性考虑智能机器人控制系统需要具备良好的实时性和稳定性,以确保机器人能够及时响应外部环境变化并做出正确决策。
在基于C语言的设计中,可以通过多线程编程或者定时中断等方式来提高系统的响应速度,并通过异常处理机制来保证系统的稳定性。
五、硬件与软件协同设计智能机器人控制系统涉及到硬件和软件之间复杂的协同设计问题。
在基于C语言的设计中,需要充分考虑硬件平台的特性和限制,合理规划软件架构,并进行充分测试和调试以确保系统正常运行。
结语通过本文对基于C语言的智能机器人控制系统设计与实现过程的介绍,相信读者对智能机器人技术有了更深入的了解。
基于ATmega128和FPGA的六自由度机器人的直流伺服控制器设计

Abstract :Int roduce a hardware syst em based o n A Tmega128. A new numerical DC motor s ha rdware system based on A Tmega128 a nd FP GA i s designed whic h i ncl udes six P WM drives , six QEP i nt erface and a lot of I/ O circuit . A Tmega128 can fetch t he data by accessing t he dat a bus . The six mul ti2joi nt s of robot are driv2 en by bot h veloci t y and posi tion P ID cont rol arit hmetic based on μC/ OS II R TOS. The res ult s of expe ri2 ment indicat e t hat t he joint’ s position preci sion ar ri ve d at 0. 01degree and t he sample ti me can arrive at 5 ms t hat ca n meet t he joint’ s a bo ut 20 Hz response bandwi dt h. Key wor ds :DC servomot or cont rol ;A Tmega128 ; FP GA ;embedded R TOS EEACC :7210B; 8380
第5期
张立勋 ,孙卓君等 :基于 A Tmega128 和 F P GA 的六自由度机器人的直流伺服控制器设计
广大ATmega128单片机实验报告实验一 系统认识实验
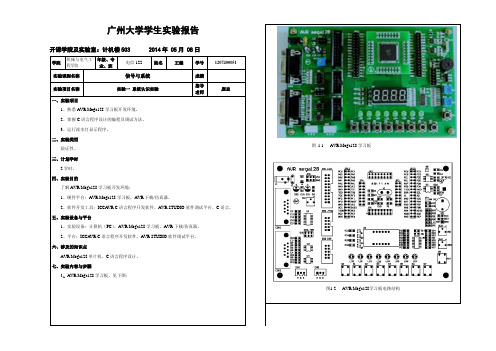
广州大学学生实验报告开课学院及实验室:计机楼503 2014年 05月 08日学院机械与电气工程学院年级、专业、班电信122 姓名王健学号1207400051实验课程名称信号与系统成绩实验项目名称实验一系统认识实验指导老师庞志一、实验项目1、熟悉AVR Mega128学习板开发环境。
2、掌握C语言程序设计的编程及调试方法。
3、运行流水灯显示程序。
二、实验类型验证性。
三、计划学时2学时。
四、实验目的了解AVR Mega128学习板开发环境:1、硬件平台:AVR Mega128学习板,AVR下载/仿真器。
2、软件开发工具:ICCA VR C语言程序开发软件、AVR STUDIO软件调试平台、C语言。
五、实验设备与平台1、实验设备:计算机(PC),AVR Mega128学习板,AVR下载/仿真器。
2、平台:ICCA VR C语言程序开发软件、AVR STUDIO软件调试平台。
六、涉及的知识点AVR Mega128单片机、C语言程序设计。
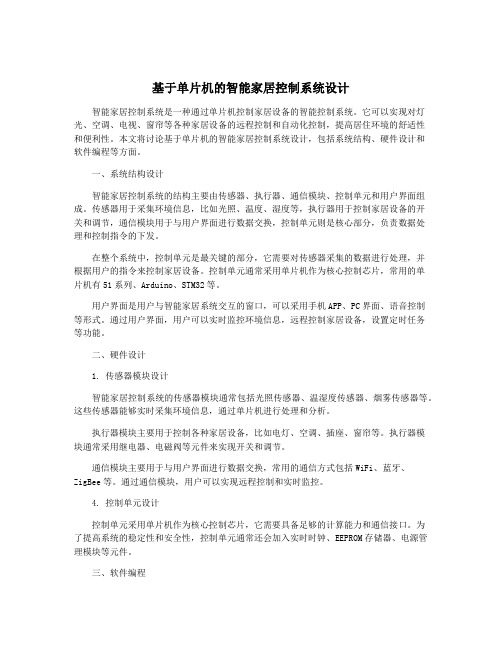
七、实验内容与步骤1、AVR Mega128学习板,见下图:图 1.1 AVR Mega128学习板图1.2 AVR Mega128学习板电路结构图1.3 AVR Mega128学习板硬件系统组成连接系统步骤:1)连接AVR下载/仿真器:将AVR下载/仿真器的排线接到AVR Mega128学习板的CH2 JTAG 插座;使用USB连线将AVR下载/仿真器和PC 连接起来。
2)连接AVR Mega128学习板电源:将电源线的圆插头插入到AVR Mega128学习板的J1插座,另一端扁形插头插入PC的USB口,系统运行内置的程序。
2、修改、编译程序1)打开ICCA VR软件,选择Project下拉菜单的Open…打开工程。
图1.4 打开工程示意图2)打开例子程序里面的工程文件01LED.prj:图1.5 打开工程文件示意图3)打开工程后,工程栏里面显示工程包含文件信息,双击右边工程栏中的main.c文件,程序显示在编辑区,可以修改程序。
基于ATmega128的温度控制系统

具有操作简单,运行可靠 ,方便携带等特点 。
关键词 :温度控 制 系统 ;AT me g a l 2 8 ;P t l 0 0 0 ;H桥 驱 动电路 ;半导体 T EC片
中图分类号 :T P 2 7 3
收稿 日期 :2 0 1 6 -1 1 —1 8
文献标识码 :A
文章编号 :1 O O 6 — 8 8 3 X( 2 0 1 7 ) 0 1 — 0 0 2 8 — 0 5
基于 ATme g a 1 2 8的温度控制系统
陶子涵 高国伟 潘宏生 李银银 白万涛 袁鑫泉 李王 月 琪
| 叠 l j : j r - I ’ ∞ : ■{ 一 一 ; 1 0 。
一
、
引言
定 某个 温 度 值 时, 只需 要通 过 键 盘键 入 温 度 即 町。
据 这个思路 设计 了一个恒温控 制系统 ,对 于外 出旅行 或 者户 外军事方面 , 这个系统也具有较高的实用价值 。
准 ,构 成 了系 统 的 模 拟 电源 电路 , 如 罔 2 ( b )所 示 。
二 、温度控制系统的总体设计
系 统 整 体 结 构 框 图 如 图 1所 示 。 系 统 以 A T me g a 1 2 8 — 1 6 A C 片 机 作 为 控 制 孩 心 , 由 电 源 电
.
5 . 8 0 2X l ( )
2 47 4× l 0 0
t _O S
3. 9 0 8× 1 O
一
5 . 8 0 2× l 0
进 行 温 度 的 实 时 监 测 , 实 时 地 采 集 记 录 温 度 信 息 , 并
三 、系统硬件电路设计
1 、 电源 电路
基于ATmega128单片机的智能蒸柜控制系统设计
基于ATmega128单片机的智能蒸柜控制系统设计赵敏华;胡娟平;李金【摘要】基于ATmega128单片机设计了智能蒸柜控制系统.由于蒸柜系统之前采用西门子PLC,目前这一系列已经停产,为了实现控制系统优化,采用以ATmega 128单片机为控制核心单元,取代原来由PLC及触摸屏组成的控制系统,并在软件程序部分将原来的PID算法改进为模糊自整定PID算法.经过软硬件测试,控制系统与原系统相比更简单、准确、稳定、经济、智能,值得在实际应用中广泛推广.%The control system for an intelligent steaming cabinet based on ATmegal28 SCM (single chip microcomputer) is designed in this paper. Siemens PLC is often used in the design of control system for steam cabinet, but a series of PLC is not in production. In order to optimize the control system, the proposed control system with ATmega 128 microcontroller as the core control unit replaces the former control system which is composed of PLC and touch screen. In addition, the PID algorithm is im-proved to the fuzzy self-turning PID algorithm. Through the hardware and the software test, data acquisition and analysis results with the optimized system show that the improved control system is more simple, more accurate, more stable, cheaper and more intelligent than the original one, which is worthy of popularization in practical application.【期刊名称】《现代电子技术》【年(卷),期】2013(036)001【总页数】4页(P137-139,143)【关键词】智能蒸柜;ATmega128单片机;485/FC协议;模糊自整定PID算法【作者】赵敏华;胡娟平;李金【作者单位】西安建筑科技大学信息与控制工程学院,陕西西安710055;西安建筑科技大学信息与控制工程学院,陕西西安710055;西安艾贝尔科技发展有限责任公司,陕西西安710075【正文语种】中文【中图分类】TN47-34智能蒸柜控制系统是一个蒸柜控制系统的改造与优化,之前采用的控制单元部件为西门子S5系列PLC和MP370触摸屏。
基于单片机的人形机器人控制系统设计
基于单片机的人形机器人控制系统设计人形机器人是一种具有拟人动作和表情特征的智能机器人,可以用于娱乐、教育、辅助等多个领域。
而单片机作为一种集成度较高的微型计算机,具有处理能力强、体积小、功耗低等特点,适合用于人形机器人的控制系统设计。
人形机器人控制系统设计主要包括机械结构设计、传感器设计、运动控制设计和人机交互设计等几个方面。
首先是机械结构设计,即人形机器人的外形和运动结构设计。
通过使用CAD软件进行建模和仿真,设计出满足人形机器人功能需求的外形和机械结构。
在设计过程中要考虑机械臂、关节的旋转范围和力度等因素,以便实现人形机器人各种动作和灵活性。
接下来是传感器设计,人形机器人可以使用各种传感器来获取外界环境信息。
例如,可以使用红外传感器或超声波传感器来获取距离信息,以避免人形机器人撞到障碍物;可以使用压力传感器或力传感器来感知外界施加在机器人身上的力度;可以使用视觉传感器来获取图像信息,以进行目标识别和跟踪等。
然后是运动控制设计,即通过控制电机和执行器来实现人形机器人的各种动作。
根据机械结构设计和传感器反馈信息,设计合适的控制算法,控制电机和执行器的转动角度和力度,使人形机器人能够实现自由行走、抓取等动作。
同时,还要考虑电机和执行器的功耗和控制精度,以确保人形机器人的稳定性和可靠性。
最后是人机交互设计,人形机器人需要与人进行交互和沟通。
可以使用语音识别技术和自然语言处理技术,让人形机器人能够理解和回答人的问题;可以使用人脸识别技术,让人形机器人能够识别和表情回应人的情绪;可以使用触摸屏和按钮等设备,让人形机器人能够接收和响应人的指令。
综上所述,基于单片机的人形机器人控制系统设计涉及到机械结构、传感器、运动控制和人机交互等多个方面。
在设计过程中,需要考虑人形机器人的外形、运动结构、力度、传感器选择和布局、电机和执行器控制、人机交互方式等因素。
通过合理设计和优化控制算法,可以实现稳定、灵活和智能化的人形机器人控制系统。
基于单片机的智能家居控制系统设计
基于单片机的智能家居控制系统设计智能家居控制系统是一种通过单片机控制家居设备的智能控制系统。
它可以实现对灯光、空调、电视、窗帘等各种家居设备的远程控制和自动化控制,提高居住环境的舒适性和便利性。
本文将讨论基于单片机的智能家居控制系统设计,包括系统结构、硬件设计和软件编程等方面。
一、系统结构设计智能家居控制系统的结构主要由传感器、执行器、通信模块、控制单元和用户界面组成。
传感器用于采集环境信息,比如光照、温度、湿度等,执行器用于控制家居设备的开关和调节,通信模块用于与用户界面进行数据交换,控制单元则是核心部分,负责数据处理和控制指令的下发。
在整个系统中,控制单元是最关键的部分,它需要对传感器采集的数据进行处理,并根据用户的指令来控制家居设备。
控制单元通常采用单片机作为核心控制芯片,常用的单片机有51系列、Arduino、STM32等。
用户界面是用户与智能家居系统交互的窗口,可以采用手机APP、PC界面、语音控制等形式。
通过用户界面,用户可以实时监控环境信息,远程控制家居设备,设置定时任务等功能。
二、硬件设计1. 传感器模块设计智能家居控制系统的传感器模块通常包括光照传感器、温湿度传感器、烟雾传感器等。
这些传感器能够实时采集环境信息,通过单片机进行处理和分析。
执行器模块主要用于控制各种家居设备,比如电灯、空调、插座、窗帘等。
执行器模块通常采用继电器、电磁阀等元件来实现开关和调节。
通信模块主要用于与用户界面进行数据交换,常用的通信方式包括WiFi、蓝牙、ZigBee等。
通过通信模块,用户可以实现远程控制和实时监控。
4. 控制单元设计控制单元采用单片机作为核心控制芯片,它需要具备足够的计算能力和通信接口。
为了提高系统的稳定性和安全性,控制单元通常还会加入实时时钟、EEPROM存储器、电源管理模块等元件。
三、软件编程1. 硬件驱动程序设计在单片机控制单元中,需要设计各种传感器和执行器的硬件驱动程序。
这些驱动程序需要能够实现对硬件的初始化、数据采集和控制等功能。
基于Atmega128单片机无人车控制系统电路设计
基于Atmega128单片机无人车控制系统电路设计该方案基于Atmega128单片机和无线通信技术设计,其创新点是采用了PC控制模式和单兵运行模式两种方式对无人车进行控制,极大地增强了无人车的功能性和环境适应能力。
该方案可广泛应用于短途货运客运、应急救援、恶劣环境下自动作业等领域。
智能无人车是一种履带式移动机器人,目前市场上的无人车大多采用单片机对其进行控制,其优点是体积小,成本低,结构简单,但仅仅依靠单片机远不能使无人车在复杂多变的工作环境中进行及时调整,并且极大地限制了其功能的扩展。
基于此不足,本设计主要利用PC机与无人车的无线通信,使无人车在PC机无线指令下完成前进、后退、转弯、打击、生命值显示、调速和自动行驶等功能,并通过车载摄像头实时获取无人车所处环境信息,实现了远程监控。
在执行任务时,如遭遇敌方车辆干扰通信,无人车在抵御干扰信号同时进行敌我识别,适时作出反击。
无人车系统工作原理为:打开教学无人车电源时,Atmega128单片机通过语音模块使扬声器发出启动提示。
当上位机无线控制台及PC端软件准备好后,PC端控制软件通过USB口向无线控制台单片机发出指令,使其配置无线模块相关寄存器,芯片进入指令发射模式;下位机由Atmega128单片机控制,在接收到上位机的指令后通过其集成的PWM外设模块产生2路PWM波和4 条转向控制线经电机驱动模块增大驱动能力后控制左右2个电机产生相应的动作。
例如,当PC端发出左转的指令时,下位机的无线模块接受成功后会自动返回接受成功应答信号。
接着Atmega128单片机通过PA口控制L298P,使左侧电机反向转动,右侧电机正向转动,从而实现左转的功能;当PC端发出打击指令时,Atmega128则通过PE5口使红外发射管发出相应码制的红外进攻信号;当PC端发出自动行驶指令时,Atmega128结合接收霍尔传感器采集回来。
基于ATmega128的智能机器人小车控制系统设计
基于ATmega128的智能机器人小车控制系统设计冯蓉珍【摘要】An intelligent car control system based on ATmega128 was designed in this article.By measuring the car speed through photoelectric coder and dealing it with bang-bang + PID algorithms,a PWM signal was created to control the speed of motors,which leads to the rapid and precise control of the car.Sensors to dodge balks and measure are also equipped in the car to achieve tracing and balk dodging.%基于ATmega128单片机的智能小车控制系统,通过光电编码器实现对小车速度的测量并将速度值进行bang-bang+PID运算,产生控制直流电机转速的PWM电压信号,实现对车速的快速调整和精确控制。
小车控制系统还配有避障和灰度传感器,用于检测障碍物和地面灰度,实现小车避障和寻迹功能。
【期刊名称】《河北软件职业技术学院学报》【年(卷),期】2012(014)001【总页数】5页(P37-41)【关键词】ATmegal128;机器人;智能小车;单片机;PID【作者】冯蓉珍【作者单位】苏州经贸职业技术学院信息系,江苏苏州215009【正文语种】中文【中图分类】TP2730 引言机器人小车是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。
随着传感技术、计算机科学、人工智能及其他相关学科的迅速发展,机器人小车正向着智能化的方向发展[1]。
智能机器人小车必须具有感知周围环境、进行任务规划和决策的能力,特别是在上下坡、弯道等不同的环境中需要实现速度控制、避开障碍物及沿某轨迹自主行走等功能,因此系统必须具有丰富的传感器、功能强大的控制器以及灵活精确的驱动系统。
基于Atmega128L的类壁虎机器人运动控制系统的实现

ii
基于 Atmega128L 的类壁虎机器人运动控制系统的实现
图清单
图 1.1 微型爬壁机器人的三维结构简图 ...................................................................2 图 1.2 基于 LPC2104 控制系统原理框图 ..................................................................2 图 1.3 爬壁平台整体结构图 .......................................................................................3 图 1.4 吸盘的结构剖面 ...............................................................................................3 图 1.5 机器人的机械结构图 .......................................................................................4 图 1.6 机器人的脚部结构图 .......................................................................................4 图 1.7 Stickbot 机器人 ..................................................................................................5 图 1.8 Stickbot 控制系统应用程序界面图 ..................................................................5 图 1.9 Stickbot 控制系统硬件图 ..................................................................................6 图 2.1 类壁虎机器人的结构原理图 ...........................................................................9 图 2.2 类壁虎机器人的尺寸参数 ...............................................................................9 图 2.3 类壁虎机器人的结构模型 .............................................................................10 图 2.4 机器人的机器手臂 .........................................................................................11 图 2.5 机器人的连杆坐标系 .....................................................................................11 图 3.1 控制系统发射端的结构图 .............................................................................14 图 3.2 控制系统接收端的结构图 .............................................................................14 图 3.3 控制系统的原理图 .........................................................................................15 图 3.4 初期设计的控制系统实物图 .........................................................................15 图 3.5 控制系统的实物图 .........................................................................................16 图 3.6 Atmega128 的引脚配置 ...................................................................................19 图 3.7 单片机系统及舵机的电源电路图 .................................................................20 图 3.8 无线模块的电源电路图 .................................................................................21 图 3.9 复位电路 .........................................................................................................21 图 3.10 外部复位时序图 ...........................................................................................22 图 3.11 串行通讯信电路 ...........................................................................................22 图 3.12 JTAG 接口电路 ..............................................................................................23 图 3.13 ISP 接口电路 .................................................................................................23 图 3.14 单片机系统和无线模块的接口电路 ...........................................................24 图 3.15 无线模块实物图 ...........................................................................................24 图 3.16 无线模块的封装示意图 ...............................................................................25 图 4.1 舵机实物图 .....................................................................................................29
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:为了实现PC机对机器人的无线控制功能,以一个具有四自由度机械手的服务机器人为例,设计该服务机器人 的控制系统,实现计算机与单片机间的无线通信,从而可以通过计算机控制机器人。详细介绍该室内服务机器人控制系统 的硬件设计和软件实现的全过程。以ATmegal28单片机作为控制核心,PC控制软件可以通过无线通信模块对机器人进行 控制,扩展了机器人的服务功能。在Codevision AVR环境下采用c语言编程实现;同时,采用Visual C++6.0编写一个数 据帧接收程序,完成PC机与单片机之间的通信。
Absn翟ct:Taking a service robot with 4-DOF as an example。its control system was designed to realize the wireless colnlwlunication
between PC and MCU,80 the robot could be controlled by computer.The hardware and software desi掣1s of the indoor 8a'vice robot's
L298N的引脚9为LOGIC SUPPLY VOLTAGE Vss,即逻辑供应电压。引脚4为SUPPLY VOLTAGE Vs,即驱动部分输入电压。Vss电压要求输入最小电 压为4.5 V,最大可达36 V;vs电压最大值也是 36 V。经实验,Vs电压应该比Vss电压高,否则会 出现失控现象。
它的引脚2、3、13、14为L298N芯片输入到电 动机的输出端,其中引脚2和3能控制两相电机,对 于直流电动机,即可控制一个电动机。同理,引脚
module and the functions of the service robot were enlarged.The software was realized by C under Codevision
AVR.A data frame receiving program was written by Visual C++6.0 tO realize wireless communication b6,!tween PC and MCU.
采用1Wire技术,通过数字温度传感器——
DSl8820采集温度数据。选用ATmegal28单片机聊
口作为数据采集口。 3.1.4内置A/D转换模块和A/D通道扩展模块
ATmegal28的PFo—PF7为内置8路高速A/D转 换通道。这里选用CIM051芯片扩展8路A/D通道。
选用ATmegal28的PF0作为扩展通道。选用AT. megal28的PA0一PA2作为8路通道的选通信号。 A/D扩展通道用来采集灰度传感器数据,内置高速 通道PFl用来采集可燃气体传感器数,PF2一PF7作 为备用A/D口,以备后续开发使用。 3.1.5电机驱动模块
留
无 线
/
序
Computer
通
信
模 块 PC监控部分
富
传感器
口 无
U
液 晶
线 刊ATMEGAl28单片机R 显
通
H
不
信
器
模
驱动电机 一-一,-
块 机器人控制部分
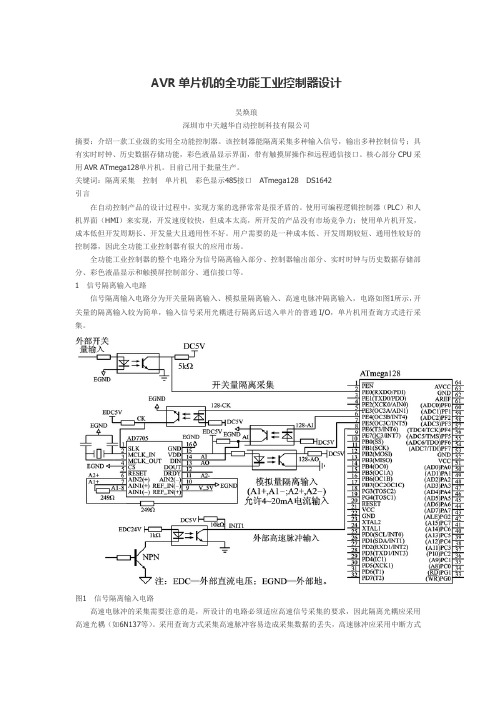
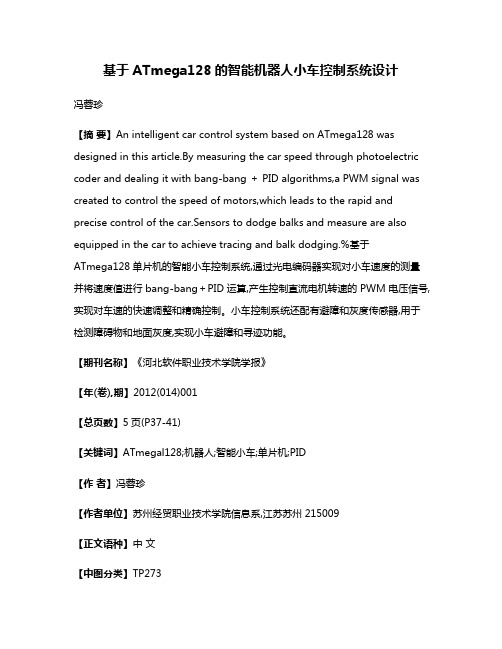
图2室内服务机器人控制系统框图
机器人控制部分的核心为ATmegal28单片机。AT- megal28单片机可以分别对无线摄像头、机械手以及驱 动电机进行控制。ATmegal28单片机通过采集灰度传 感器数据识别机器人的行走情况以及对机器人进行定 位;通过可燃气体传感器和温度传感器来检测可燃气 体和室内温度;通过液晶显示器显示各种信息;通过 串口无线通信模块实现机器人与计算机之间的通信。
PC control system were described.ATmegal28 was adopted踞control core of the hardw趾e and
control software could control the robot
comunication via wireless
WANG Junzhen91.TANG Jinyuan2
(1.School of Mechanical and Power Engineering。East China
University of Science and Technology,Shanghai 200237,China; 2.School of Mechanical Engineering,Huaihai Institute of Technology,Lianyungang Jiangsu 222005,China)
PC监控部分的控制系统硬件包括计算机、无线 通信模块以、无线视频采集卡3个部分,此处主要是 设计PC机无线通信模块以及无线视频采集卡。
PC采用串口通信,PC的串口需要外接 MAX232。MAX232与PC串口连接原理如图4所示。
Keywords:Service robot;Control system;PC;Sin甜e—chip microcomputer;Wireless communication
当前世界上的服务机器人正处于蓬勃发展的状 态,相关新技术和新产品层出不穷。有机构预测未来 服务机器人将像电脑一样普及,它将大量进入人们的 生活,从而进入机器人的时代¨。。
关键词:室内服务机器人;控制系统;PC机;单片机;无线通信 中图分类号:TP242.6 文献标识码:B 文章编号:1001—3881(2010)20一087—4
Control System Design of Indoor Service Robot Based on PC and ATmegal28
‘
收稿日期:2009—09—17 作者简介:王军政(1985一),男,硕士研究生,主要研究方向为高温高压密封、移动机器人技术。电话:13661842966,
E—mail:wangjunzhen91022@163.corno
万方数据
·88·
机床与液压
第38卷
(a)机器人三维造型
(b’样机测试
图1 室内服务机器人三维造型与机器人样机测试实图
万方数据
GND
图3机器人部分控制系统硬件电路原理图
第20期
王军政等:基于Pc与ATmegal28单片机的室内服务机器人控制系统设计
·89·
机器人控制系统核心采用ATmegal28单片机, ATmegal28为基于AVR PdSC结构的8位低功耗 CMOS微处理器。由于其先进的指令集以及单周期指 令执行时间,ATmegal28的数据吞吐率高达l MI/s。 ATmegal28具有非易失性的程序和数据存储器,具有 128 kB的系统内可编程Flash,4 kB的E2PROM寿 命,100 000次写/擦除周期以及多达64 kB的优化的 外部存储器空间。因此,采用ATmegai28芯片可以 满足对该机器人的控制要求,并方便程序烧写。 3.1.2串口无线通信模块
万方数据
13和14也可控制一个直流电动机。引脚6和1l为电 动机的使能接线脚。引脚5、7、10、12为单片机通 过光耦隔离器输入到L298N芯片的输入引脚。 3.1.6液晶显示器模块
ATmegal28单片机端口PC2--PC7用来驱动液晶 显示器。液晶显示器选用1602,采用4总线驱动方 法。ATmegal28的PCA--PC7连接显示器的高4位数 据线,PCI、PC2、PC3分别接液晶显示器的RS、 RW、E引脚。 3.1.7摄像头及无线发射装置
PC监控部分通过计算机与单片机的串口无线通 信,可以实时监测机器人的运动情况,并对机器人进 行控制。操控界面上可以显示由机器人无线摄像头捕 捉到的视频信息以及机器人所在房间位置等信息,以 便人工控制时更好地了解机器人的运行情况;另外, 还可以通过计算机发送文字信息显示在机器人液晶显 示器上。 3室内服务机器人控制系统硬件设计
ATmegal28的PWM专用口OC0和OC2作为电动 机的调速端口,PC0和和PCI用来控制电机的转向。 电机驱动采用L298大功率驱动芯片。L298是SGS (通用标准技术服务有限公司)公司的产品,比较常 见的是15脚Multiwatt封装的L298N,内部包含4通 道逻辑驱动电路。是一种二相和四相电机的专用驱动 器,即内含二个H桥的高电压大电流双全桥式驱动 器,接收标准,r11L逻辑电平信号,可驱动46 V、2 A 以下的电动机。
室内服务机器人控制系统硬件的设计包括机器人 部分的控制系统硬件设计以及PC监控部分的控制系 统硬件的设计。 3.1 机器人部分的控制系统硬件设计 3.1.1机器人部分控制系统的硬件组成
机器人部分系统硬件由处理器、串口无线通信模 块、传感器模块、电机驱动模块、液晶显示器模块等 组成服务机器人行走、夹持物体、室 内安全服务、房间识别以及通过PC机对机器人进行 无线控制等功能,设计了室内服务机器人的控制系 统,如图2,该控制系统由两个部分组成:Pc监控部
分以及机器人控制部分。
I无线视频采集号 /,\ / \/一摄像头及尢线发射装置J
¨
由