sharp红外测距传感器
机器人及常用传感器

机器人机器人有三个发展阶段,一是第一代机器人,也叫示教再现型机器人,它是通过一个计算机,来控制一个多自由度的一个机械,通过示教存储程序和信息,工作时把信息读取出来,然后发出指令,这样的话机器人可以重复的根据人当时示教的结果,再现出这种动作,比方说汽车的点焊机器人,它只要把这个点焊的过程示教完以后,它总是重复这样一种工作,它对于外界的环境没有感知,这个力操作力的大小,这个工件存在不存在,焊的好与坏,它并不知道,那么实际上这种从第一代机器人,也就存在它这种缺陷,因此,在20 世纪70 年代后期,人们开始研究第二代机器人,叫带感觉的机器人,这种带感觉的机器人是类似人在某种功能的感觉,比如说力觉、触觉、滑觉、视觉、听觉和人进行相类比,有了各种各样的感觉,比方说在机器人抓一个物体的时候,它实际上力的大小能感觉出来,它能够通过视觉,能够去感受和识别它的形状、大小、颜色。
抓一个鸡蛋,它能通过一个触觉,知道它的力的大小和滑动的情况。
第三代机器人,也是我们机器人学中一个理想的所追求的最高级的阶段,叫智能机器人,那么只要告诉它做什么,不用告诉它怎么去做,它就能完成运动,感知思维和人机通讯的这种功能和机能,那么这个目前的发展还是相对的只是在局部有这种智能的概念和含义,但真正完整意义的这种智能机器人实际上并没有存在,而只是随着我们不断的科学技术的发展,智能的概念越来越丰富,它内涵越来越宽。
那么从三代机器人发展过程中,从另一个方面,我们对机器人从应用的角度进行了分类,比如说工业机器人,它包括点焊、弧焊、喷漆、搬运、码垛,在工业现场中工作的这种机器人,我们统称为工业机器人,那么从不同的应用中,到水下去作业的叫水下机器人,到空间作业的叫空间机器人,同时又存在农业、林业、牧业,对医疗机器人叫医用机器人,还包括娱乐机器人,建筑和居室上用的机器人,所以从应用分类,它包括从行业、应用角度,也可以进行这样简单的分类。
机器人中常用的传感器主要有:用于避障的传感器,用于测距的传感器,用于亮度判断的传感器,用于测量速度的传感器,用于检测地面灰度的传感器。
HCR教育用机器人介绍

介绍:
此套件可以提供多种实验方案,包括循线实验,红外避障实验,超声波避障实验,导航试验,无线控制实验以及舵机控制实验。
套件组成:
移动平台:
长:34CM
宽:31CM
高:30CM
重量:5KG
负荷:>20KG
最大速度:1米每秒
最大爬坡度:20度
轮式机器人平台包括下层驱动底盘和上层传感器及控制板层,整车均采用高强度铝合金板加工,表面采用高档静电粉末喷塑工艺,坚固耐用。套件含多种控制板可以针对媒体互动、AVR单片机、BS2处理器、51单片机、32位ARM平台进行实验。控制板有多种接口可以连接大部分的传感器,便于以后根据应用进行扩展。适用于大学、研究所作为研究移动机器人平台,及其家庭,工业领域,远程监控等领域研究项目应用。
4.输出接口:8线制接口(GND/1/2/3/VCC/4/5/6)
5.输出电平:TTL电平(黑线低电平有效,白线高电平有效)
6.模块尺寸:20mm×60 mm
7.安装孔间距:52mm
8.模块重量:约30g
温度湿度传感器
1、供电电压:5v
2、温度测量范围:-55℃~+125℃,在-10~+85℃时精度为±0.5℃。
11.1V 5AH动力锂电池配充电器
12V空心杯行星齿轮减速电机;电机功率17W转速120rpm配套两相输出编码器。专用编码器比红外反射式的编码器抗干扰更强。两相输出可以辨别前进方向。
丰富的平台接口,提供最大化的可扩展空间
RoMeo控制板
RoMeo基于Arduino的新型多功能控制器是一块基与开放原始代码的Simple i/o平台,並且具有使用类似java,C语言的开发环境。让您可以快速使用Arduino语言与Flash或Processing…等软件,作出互动作品。RoMeo可以使用开发完成的电子元件例如Switch或Sensors或其他控制器、LED、步进电机或其他输出裝置。RoMeo也可以独立运作成为一个可以跟软件沟通的平台,例如说:flash processing Max/MSP VVVV或其他互动软件…,RoMeo开发IDE界面基于开放原始码原则,可以让您免费下载使用开发出更多令人惊奇的互动作品。同时RoMeo也可用做AVR单片机教学实验,使用的AVR MEGA168芯片,提供电路图及其例子程序。
红外传感器-sharp

SHARP(GP2D12)红外距离传感器SHARP红外距离传感器,用于模型或机器人制作,可以用来测量距离。
如图:一、技术参数:探测距离:10-80cm工作电压:4-5.5V标准电流消耗:33-50 mA输出量:模拟量输出,输出电压和探测距离成比例二、工作原理Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图:三角测量原理反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D 就可以通过几何关系计算出来了。
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD 检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
三、工作特性其引脚接口如图说明:Sharp GS2XX系列的传感器的输出是非线性的。
每个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
由上图可知:我们在测量距离为20-80cm时,还是比较准确的。
当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
这样就会出现问题了,但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
红外测距传感器的原理及功能特点
红外测距传感器的原理
红外测距传感器具有一对红外信号发射与接收二极管,利用的红外测距传感器LDM301发射出一束红外光,在照射到物体后形成一个反射的过程,反射到传感器后接收信号,然后利用CCD图像处理接收发射与接收的时间差的数据。
经信号处理器处理后计算出物体的距离。
这不仅可以使用于自然表面,也可用于加反射板。
测量距离远,很高的频率响应,适合于恶劣的工业环境中。
红外测距传感器的特点
红外测距传感器的远距离测量,在无反光板和反射率低的情况下能测量较远的距离;有同步输入端,可多个传感器同步测量;测量范围广,响应时间短;外形设计紧凑,易于安装,便于操作。
艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城/。
知名厂商热门MCU芯片应用(一):ADSP系列

知名厂商热门MCU芯片应用(一):ADSP系列AD SP——美国模拟器件公司(ADI:Analog Device Instrument)生产的数字信号处理芯片(DSP:Digital Singal Process or),代表系列有 ADSP Sharc 211xx (低端领域),ADSP Ti ge rS harc 101,201(高端领域),ADSP Bl ac kfin 系列(消费电子领域)。
ADSP与另外一个著名的德州仪器(TI:Te xas Instrument)生产的芯片特点相比较,具有浮点运算强,SIM D(单指令多数据)编程的优势,比较新的Blackfin系列比同一级别TI产品功耗低。
缺点是ADSP不如TI的C语言编译优化好.TI已经普及了C语言的编程,而AD芯片的性能发挥比较依赖程序员的编程水平.ADSP的Linkport数据传输能力强是一大特色,但是使用起来不够稳定,调试难度大。
ADI提供的Visual DSP ++2.0, 3.0, 4.0, 4.5 编程环境,可以支持软件人员开发调试。
下面是电子发烧友网编辑推荐的几个关于ADSP系列芯片的一些典型应用。
一、一种基于ADSP-2188M的多传感器数据采集系统摘要:在移动智能体的研制中,能够实时地探测周围环境信息的传感器系统是至关重要的。
本文介绍了一种以DSP-ADSP-2188M为核心的传感器数据采集系统的软、硬件设计和工作原理,以及与上位机通信的设计和实现过程。
该系统可以应用于移动机器人、智能轮椅、自动制导车辆等移动智能系统中。
引言在自主移动机器人系统、智能轮椅、自动制导车辆等智能移动系统中,需要实时地采集未知和不确定环境中的信息,以完成避障、环境地图绘制、导航、定位等运作,然后进行路径规划等任务。
这些任务必须依靠能实时感知环境信息的传感器系统来完成。
为了在复杂环境中获取有效的信息,这些系统往往安装有种类各异的传感器。
目前,常用的有视觉、激光、红外、超声等传感器。
红外 测距传感器 原理
红外测距传感器原理
红外测距传感器是一种常见于机器人、自动化控制系统等领域的传感器,其主要原理是利用红外光线的特性进行距离测量。
红外光线是一种波长在可见光波长下方但高于无线电波的光线,它在空气中传播时不受可见光的干扰,可以穿过一些物体,因此应用广泛。
红外测距传感器通常由红外光发射器和接收器两部分组成。
红外光发射器会发射一束红外光线,光线经过物体后会被反射回来,接收器会接收到这个反射信号,并通过计算反射时间来确定物体与传感器之间的距离。
由于红外光线在空气中传播速度是已知的,因此可以通过测量反射时间来计算距离。
红外测距传感器的精度和测量范围受到多种因素的影响,例如光束的扩散、环境光的干扰等。
因此在使用红外测距传感器时需要注意选择合适的型号,以及考虑到环境因素对测量结果的影响。
总之,红外测距传感器是一种非常有用的测量工具,在机器人、自动化控制系统等领域有着广泛的应用前景。
- 1 -。
工业机器人驱动传动及传感系统组成

2.3.5 接近开关
接近开关也叫近接开关,又称无触点行程开关,它除可以完成行程控 制和限位保护外,还是一种非接触型的检测装置,用作检测零件尺寸和测 速等,也可用于变频计数器、变频脉冲发生器、液面控制和加工程序的自 动衔接等。它是一种非接触传感器。是用来代替传统的微动开关等机械式 触觉传感器的。由于接近开关不需要接触被测物体,所以其特点有工作可 靠、寿命长、功耗低、复定位精度高、操作频率高以及适应恶劣的工作环 境等。
运行性能不同: 步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵
转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,应 处理好升、降速问题。交流伺服驱动系统为闭环控制,驱动器可直接对电机 编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电 机的丢步或过冲的现象,控制性能更为可靠。
绝对式编码器的工作原理如下图所示。左图示意了从发光管经过分光滤 镜等光学组件,通过编码盘的透射光被光学敏感器件检测到的原理。右图是 一个8位(256点分辨率)绝对式编码盘的示意图。编码盘具有8个同心圆,分 别代表8个有效位。黑色表示不透光,白色表示透光。发光管发出的光线经过 分光组件后变成8组平行光,穿过编码盘的光投射到光学敏感器件上就可以得 到编码盘当前的角度信息。
2.2.3 行星减速器
行星减速器,是比较典型的减速器之一,相对尺寸较小,容易获得大的 速比。特点是低噪音、高精度、安装简单效率高。
行星式齿轮减速机的传动机构是齿轮,其结构简图很简单,有一大一小 两个圆,两圆同心,在两圆之间的环形部分有另外三个小圆,所有的圆中最 大的一个是内齿环,其他四个小圆都是齿轮,中间那个叫太阳轮,另外三个 小圆叫行星轮,如图所示。电机带动减速机的太阳轮,太阳轮再驱动支撑在 内齿环上的行星轮,行星轮通过其与外齿环的啮合传动,驱动与外齿环相连 的输出轴,就达到了减速的目的,减速比与齿轮系的规格有关。
红外测距传感器工作原理

红外测距传感器工作原理红外测距传感器工作原理是通过发射红外光束来测量目标物体与传感器的距离。
红外测距传感器主要由红外发射器和红外接收器两部分组成。
红外发射器是利用LED(发光二极管)发射红外线的一个元件,其内部由发光二极管芯片和外部吸收层组成。
发光二极管芯片受到正极电压的驱动后,内部活性物质发生受激辐射,产生红外线辐射。
红外接收器是通过接收到红外线并转化为电信号来实现测距的一个元件。
红外接收器的核心是红外敏感元件,常用的包括光敏二极管、光敏电阻和光敏三极管等。
红外敏感元件在受到红外线照射后,会产生一定的电流或电阻变化,进而转化为可测量的电信号。
在红外测距传感器工作时,首先红外发射器会发射红外光束,该光束经过传感器的特殊光学元件(如凸透镜)进行聚焦和发散,然后照射在目标物体上。
目标物体表面会对红外光产生反射、散射和吸收,其中一部分红外光经过反射、散射后再次进入传感器的接收器中。
红外接收器接收到这部分红外光后,红外敏感元件会产生对应的电流或电阻变化信号。
根据目标物体与红外测距传感器的距离不同,接收到的红外光的强度也会有所不同。
通常情况下,目标物体越远离传感器,接收到的红外光的强度越弱;目标物体越靠近传感器,接收到的红外光的强度越强。
通过测量红外接收器输出的电流或电阻变化信号的强度,红外测距传感器可以计算得出目标物体与传感器之间的距离。
为了提高测量的精度和准确性,红外测距传感器通常会采用一系列的技术和方法来进行校准和装置设计。
例如,传感器可以通过在不同的距离下进行标定,建立起距离与输出信号之间的关系曲线。
通过对测得的输出信号进行算法分析和处理,可以精确地测量目标物体与传感器之间的距离。
红外测距传感器工作原理简单易懂,且具有较高的测量精度和稳定性。
因此,在很多应用领域,如无人机定位导航、机器人感知、智能家居和安防监控等方面,红外测距传感器被广泛使用。
红外测距传感器工作原理

红外测距传感器工作原理红外测距传感器是一种能够检测距离并将测量结果转换为电信号输出的传感器。
它主要利用红外线的特点来测量距离。
红外线的波长在可见光与微波之间,无法被人眼所看见。
不同的物体对于红外线的反射和吸收程度也不同,这就为红外测距传感器的测量提供了依据。
红外测距传感器的工作原理一般可以分为以下几个步骤:1. 发射红外线信号。
传感器会通过内部的发射器发出一道特定频率的红外线信号,这个频率通常是10kHz到100kHz之间。
2. 红外线信号的反射。
当发射的红外线信号照射到物体表面时,部分信号会被反射回传感器。
3. 接收反射信号。
传感器中内置的接收器会接收这些反射信号,并将其转换为电信号。
4. 信号处理。
传感器会将接收到的电信号转换为数字信号,并进行处理以得出物体到传感器的距离。
红外测距传感器在测量过程中还需要考虑一些影响因素。
比如,反射到传感器的光线强度、反射物体的颜色和表面状况等。
这些因素会影响传感器的测量准确度和稳定性。
红外测距传感器常常被应用于机器人控制、无人机、智能家居、物流仓储等领域。
具体应用场景如下:1. 机器人控制。
红外测距传感器可以用来检测机器人周围障碍物的距离,帮助机器人避免碰撞或跌落。
2. 无人机。
红外测距传感器可以用来帮助无人机实现自动避障和自动降落等功能。
3. 智能家居。
红外测距传感器可以用来检测一个房间中的人数和位置,实现智能的照明和温度控制等功能。
4. 物流仓储。
红外测距传感器可以用来监测并跟踪集装箱、货物等物品的位置和状态。
总之,红外测距传感器通过发射红外线信号并接收反射信号来测量物体到传感器的距离。
它广泛应用于机器人控制、无人机、智能家居、物流仓储等领域。
灭火机器人的设计中需要的传感器使用方法

灭火机器人的设计中需要的传感器使用方法在灭火机器人中主要使用了三类传感器,火焰传感器是用来探测火焰的;红外传感器用来测量小车到墙壁的距离,用来定位;灰度传感器主要是用来识别地面的白线。
一、火焰传感器。
远红外火焰探头将外界红外光的变化转化为电流的变化,通过a/d转换器反映为0~1023范围内的数值。
外界红外光越强,数值越小。
因此越靠近热源,机器人显示读数越小。
根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。
此外,远红外火焰探头探测角度为60°。
火焰传感器的原理图如下:采用中在火焰传感器上串联了一个电位器,这样便可以调整传感器的灵敏度。
在相同光线环境下,轻易调整电位器,即可增加外界光对传感器的影响。
在以往的比赛中,通常都在机器人前方安装三个以上的火焰传感器去观测火焰,这样机器人抵达房间门口即可感应器至火焰与否存有,但是这种方案难受到相机闪光灯、阳光等影响,所以本系统中未使用。
本系统中使用的就是单传感器提舵机的方案。
挑一不透光黑色胶卷筒,在其尾部钻孔,将火焰传感器放入其中,再将胶卷筒紧固在舵机舵盘上。
这样,火焰传感器就能够随舵机旋转,在旋转的过程中展开a/d取样,实验证明抗干扰能力较好。
并且小车距离火焰2.6cm以外即可“看看”至底部距地面15cm~20cm高度不定的火焰,满足用户比赛建议。
二、红外测距传感器。
红外测距传感器使用的是sharp公司的gp2d12集成高精度传感器,测量有效距离为10cm~80cm,对应输出电压为2.5v~0v。
传感器外形及距离-电压曲线图如下:本系统中共采用了三个红外测距传感器(以下缩写psd),一个车壳机器人正前方,另外两个分别车壳机器人两侧,与前方psd成90度。
主要用这三个psd去测量前方、左方、右方返回墙壁的距离。
但是在采用该传感器的过程中存有很多不当的地方在此并作一些表明。
传感器安装错误。
在组装机器人时,为了安装方便将传感器安装成如图4-4所示,这样安装就使得机器人在沿墙走的过程中如果遇到内角拐弯时就必需不断配合检测前方传感器的值才能完成拐弯动作如图4-6,增加了程序的复杂性,降低了系统的可靠性。
创意之星机器人说明

v1.0 可编辑可修改创意之星机器人说明书目录1结构套件简介 ............................................................................ .. (3)结构件概述 ............................................................................ (3)C o n n F L E X连接结构 ............................................................................ (3)不同版本 ............................................................................ . (4)使用零件3D模型 ............................................................................ . (6)2控制器及电源 ............................................................................ .. (7)M u l t i F L E X™2-A V R控制器 ............................................................................ (8)M u l t i F L E X™2-P X A270控制器 ............................................................................ (9)电池和直流电源 ............................................................................ (12)3传感器............................................................................. .. (12)传感器的信号类型及电气规范 ............................................................................ (13)“创意之星”传感器接口 ............................................................................ (14)接近传感器 ............................................................................ .. (16)测距传感器 ............................................................................ . (19)声音传感器 ............................................................................ . (24)碰撞传感器 ............................................................................ . (26)倾覆传感器 ............................................................................ . (26)温度传感器 ............................................................................ . (27)光强传感器 ............................................................................ . (27)灰度传感器 ............................................................................ (28)视觉和语音传感器 ............................................................................ (28)4执行器............................................................................. (29)C D S5516机器人舵机 ............................................................................ .. (29)C D S5401大扭矩R/C舵机 ............................................................................ .. (32)B D M C1203电机驱动模块 ............................................................................ (33)F a u l h a b e r大功率减速电机............................................................................. .. (34)5N o r t h S T A R图形化开发环境 ............................................................................ (35)安装及使用介绍 ............................................................................ . (35)使用流程图开发 ............................................................................ (39)手写代码开发 ............................................................................ . (46)调试与在线监控 ............................................................................ (47)6其它部件............................................................................. (54)U P-D e b u g g e r下载调试器 ............................................................................ .. (54)W i F i无线网卡或以太网线缆............................................................................. (55)Z i g B e e无线模组 ............................................................................ .. (56)1结构套件简介结构件概述“创意之星”是一种模块化机器人组件,其特点是组成机器人的各种零件都是通用、可重组的,各个零件之间有统一的连接方式,零件之间可以自由组合,从而构建出各种各样的机器人构型。
GP12D夏普红外线传感器

Arduino&GP2D12红外线测距传感器[ 2008/6/14 19:50:00 | By: wxxmickey ]3推荐最近忙生活琐事,很少搞这些小东东,今天闲了一下就发表一个Arduino控制GP2D12的小实例,仅供大家参考!器材:Arduino开发板,GP2D12,1602字符液晶,连接线若干。
Arduino开发板和1602字符液晶我就不多介绍了,前面都提到过。
GP2D12是日本SHARP公司生产的红外距离传感器,价格便宜,测距效果还不错,主要用于模型或机器人制作。
技术规格如下:探测距离:10-80cm工作电压:4-5.5V标准电流消耗:33-50 mA输出量:模拟量输出,输出电压和探测距离成比例从曲线图中我们可以看出,输出电压并非是线性的,所以这个测距也就只能测个大概,如果要精度高的话就需要做非线性校正,这里我们就不讨论这个问题了。
实验原理:GP2D12根据距离的远近输出相应的电压,经Arduino开发板0号模拟口输入,转换成数字量,根据公式计算得到需要显示的数据。
实验原理图:实验实物图:没有障碍物,显示范围超出。
有障碍物时显示测量距离。
经实验,需要在GP2D12的电源端加个10UF以上的电解电容,稳定供电电压,以保证输出模拟电压更稳定。
实验代码:/********************************************************************/int GP2D12=0;int ledpin = 13;int LCD1602_RS=12;int LCD1602_RW=11;int LCD1602_EN=10;int DB[] = {6, 7, 8, 9};char str1[]="";char str2[]="Renge:00cm";char str3[]="Renge Over";/********************************************************************//********************************************************************/void LCD_Command_Write(int command){int i,temp;digitalWrite( LCD1602_RS,LOW);digitalWrite( LCD1602_RW,LOW);digitalWrite( LCD1602_EN,LOW);temp=command & 0xf0;for (i=DB[0]; i <= 9; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);temp=(command & 0x0f)<<4;for (i=DB[0]; i <= 10; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);}/********************************************************************/ void LCD_Data_Write(int dat){int i=0,temp;digitalWrite( LCD1602_RS,HIGH);digitalWrite( LCD1602_RW,LOW);digitalWrite( LCD1602_EN,LOW);temp=dat & 0xf0;for (i=DB[0]; i <= 9; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);temp=(dat & 0x0f)<<4;for (i=DB[0]; i <= 10; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);}/********************************************************************/ void LCD_SET_XY( int x, int y ){int address;if (y ==0) address = 0x80 + x;else address = 0xC0 + x;LCD_Command_Write(address);}/********************************************************************/ void LCD_Write_Char( int x,int y,int dat){LCD_SET_XY( x, y );LCD_Data_Write(dat);}/********************************************************************/ void LCD_Write_String(int x,int y,char *s){LCD_SET_XY( x, y ); //设置地址while (*s) //写字符串{LCD_Data_Write(*s);s ++;}}/********************************************************************/ void setup (void){int i = 0;for (i=6; i <= 13; i++){pinMode(i,OUTPUT);}LCD_Command_Write(0x28);//4线2行2x7delay(50);LCD_Command_Write(0x06);delay(50);LCD_Command_Write(0x0c);delay(50);LCD_Command_Write(0x80);delay(50);LCD_Command_Write(0x01);}/********************************************************************/ void loop (void){int tmp;cahr val;char i,a,b;LCD_Command_Write(0x02);delay(50);LCD_Write_String(1,0,str1);delay(50);LCD_Write_String(3,1,str2);delay(50);while(1){tmp = analogRead(GP2D12);if (tmp < 3)return -1;val=(6787.0 /((float)tmp - 3.0)) - 4.0;if(val>80||val<10){LCD_Write_String(3,1,str3);}else{LCD_Write_String(3,1,str2);a=0x30+val/10;b=0x30+val%10;LCD_Write_Char(9,1,a);LCD_Write_Char(10,1,b);}delay(500);}}。
灭火机器人的设计中需要的传感器使用方法

灭火机器人的设计中需要的传感器使用方法在灭火机器人中主要使用了三类传感器,火焰传感器是用来探测火焰的;红外传感器用来测量小车到墙壁的距离,用来定位;灰度传感器主要是用来识别地面的白线。
一、火焰传感器。
远红外火焰探头将外界红外光的变化转化为电流的变化,通过 A/D转换器反映为 0~1023 范围内的数值。
外界红外光越强,数值越小。
因此越靠近热源,机器人显示读数越小。
根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。
此外,远红外火焰探头探测角度为60°。
火焰传感器的原理图如下:使用中在火焰传感器上串联了一个电位器,这样便可以调整传感器的灵敏度。
在不同光线环境下,直接调整电位器,即可减少外界光对传感器的影响。
在以往的比赛中,一般都在机器人前方加装三个以上的火焰传感器来探测火焰,这样机器人到达房间门口即可感应到火焰是否存在,但是这种方案容易受相机闪光灯、阳光等影响,所以本系统中未采用。
本系统中采用的是单传感器加舵机的方案。
取一不透光黑色胶卷筒,在其尾部钻孔,将火焰传感器装入其中,再将胶卷筒固定在舵机舵盘上。
这样,火焰传感器就能随舵机转动,在转动的过程中进行A/D采样,实验证明抗干扰能力很好。
并且小车距离火焰2.6cm以外即可“看”到底部距地面15cm~20cm高度不定的火焰,满足比赛要求。
二、红外测距传感器。
红外测距传感器使用的是SHARP公司的GP2D12集成高精度传感器,测量有效距离为10cm~80cm,对应输出电压为2.5V~0V。
传感器外形及距离-电压曲线图如下:本系统中共使用了三个红外测距传感器(以下简称PSD),一个装于机器人正前方,另外两个分别装于机器人两侧,与前方PSD成90度。
主要用这三个PSD 来测量前方、左方、右方离开墙壁的距离。
但是在使用该传感器的过程中有很多不当的地方在此作一些说明。
传感器安装错误。
在组装机器人时,为了安装方便将传感器安装成如图4-4所示,这样安装就使得机器人在沿墙走的过程中如果遇到内角拐弯时就必需不断配合检测前方传感器的值才能完成拐弯动作如图4-6,增加了程序的复杂性,降低了系统的可靠性。
DIY 机器人,电子大赛 GP2D12 红外测距传感器

DIY 机器人,电子大赛 GP2D12 红外测
距传感器
这个器件大家都很熟悉了,国外的每个机器人器件网上商店也都有供应,可是国内却难以寻觅,为了大家能够少些郁闷,我备了一些,欢迎垂询。
GP2D12红外测距传感器是深受广大机器人爱好者喜爱的一款测距传感器。
有效范围为10cm至150cm,能准确测出障碍物与传感器之间的直线距离,很多专业的机器人也采用了这种传感器。
抗干扰能力强,使用简单。
SHARP GP2D12 数据手册( Datasheet )
SHARP GP2D12 应用指南 (Application Note) SHARP GP2D12 关键工作波形
上述资料都是从国外网站收集的,全是英文,。
GP2D12
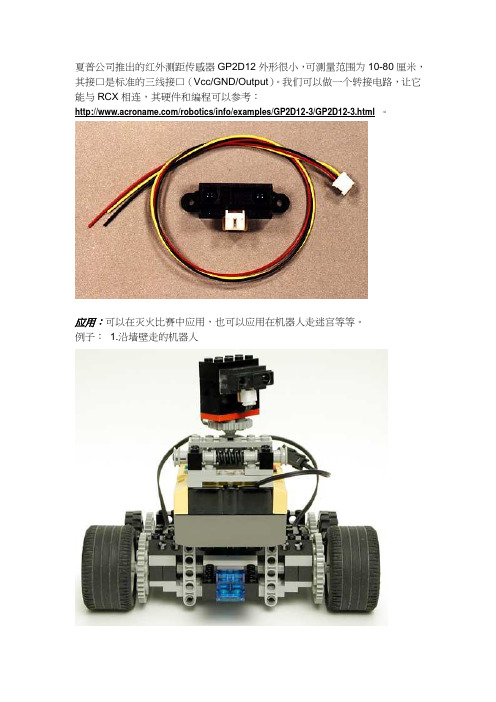
夏普公司推出的红外测距传感器GP2D12外形很小,可测量范围为10-80厘米,其接口是标准的三线接口(Vcc/GND/Output)。
我们可以做一个转接电路,让它能与RCX相连,其硬件和编程可以参考:/robotics/info/examples/GP2D12-3/GP2D12-3.html。
应用:可以在灭火比赛中应用,也可以应用在机器人走迷宫等等。
例子:1.沿墙壁走的机器人2.沿墙壁走的机器人的行走状态This article, complete with text and images, was written by Philippe Hurbain. IntroductionI long thought that a distance sensor would be a nice addition to Mindstorms robots, but ultrasonic ones were bulky and power hungry (I've since found the SRF04 Ultrasonic Range Finder that can perhaps be used), and simple infrared methods like the one I used in my radar car detect obstacles but don't give true distance measurement. The solution came from Andreas Peter (thanks Andreas for showing me these devices !) who interfaced a Sharp GP2D05 to RCX.These small and rather inexpensive infrared devices are able to measure distance between 10 and 80 cm with reasonable precision and good immunity to variations of obstaclesreflectivity and ambient light. For more informations, see the GP2D12 datasheet and the Acroname article: Demystifying the Sharp IR Detectors.Andreas's sensor interface has a few drawbacks though. The Sharp GP2D05 he used has a digital serial output not well suited to RCX analog input, thus requiring a rather complex design, big and power hungry.So I decided to try to connect the analog output GP2D12 sensor using the simplest design possible -- and use only power coming from sensor input. This was a real challenge since the GP2D12 used 35mA under 5V, while RCX sensor input is current-limited to about14mA! Look at voltage versus current of sensor input power supply:The main concept to achieve this goal was quickly imagined: store energy in a capacitor while the GP2D12 is not powered, then release it during measure. Of course there is a penalty with this technique: conversion time is longer. The GP2D12 requires 50ms per measure, while my circuit needs 300ms... there is no free lunch!The first designs I imagined were rather complex, with timers and a sample-and-hold amplifier, then I slowly came to this streamlined circuit:Using the CircuitCharging phaseDuring 250ms, sensor is configured as a light sensor (powered), C1 charges through D1 up to SENSOR+ voltage. Low drop regulator U1 generates a +5V regulated supply. Q1 is blocked by D2 (D2 maintains base to a voltage higher or equal to its emitter voltage), so GP2D12 is not powered. Q3 is non-conducting too, preventing current flow throughD3/R5/Q2. So the only significant current diverted from C1 charging is through R1 (less than 2mA), and at the end of this phase C1 is fully charged.Measurement phaseDuring the following 50ms, sensor is configured as a touch sensor (passive). SENSOR+ is now only pulled up to +5V through 10Kohm (inside RCX), insufficient to block Q1. Q1 and Q3 are then conducting, and GP2D12 is powered. Q2, mounted as an emitter follower, buffers GP2D12 output and its value is available to RCX through D3 and R5.Sample code to read sensor:SetSensor(SENSOR_1,SENSOR_LIGHT);Wait(25);SetSensor(SENSOR_1,SENSOR_TOUCH);Wait(5);SetSensorMode(SENSOR_1,SENSOR_MODE_RAW);distance = SENSOR_1;//Enable C1 charge as soon as possibleSetSensor(SENSOR_1,SENSOR_LIGHT);Component Selection∙D1 prevents destroying the sensor in case of reverse connection. I didn't use the full-bridge rectifier used in Lego sensor that enables sensors to work when connected backwards (number of needed diodes jumps from 3 to 8!). Iconsidered that someone able to build this sensor is also able to connect it inthe right way... For those who want it, here is the diagram with full bridgerectifier. I used 1 Amp Shottky diode 1N5819 for D1, which is inexpensiveand readily available. It's low forward drop voltage is less than 0.1V for thecurrent that flows through it, this enables it to charge C1 to the highest voltage possible.∙C1 stores energy that will be used during measurement phase. It must provide +5V at the end of this stage. Assuming typical values for theGP2D12 (I=35mA, conversion time=50ms) and an initial +7.5V across C1, its value is C = I * dT / dV = 35 * 50 / (7.5-5) = 700 µF. Small margin with 1000 µF...∙U1 is a low drop out 5V regulator in TO92 case. I used a Telcom/Microchip TC55RP5000 but other regulators will probably work, such asSTMicroelectronics L4931-50. Standard regulators such as 78L05 will NOTwork because they require more than +7V at input to get a +5V output. Takecare with some low drop regulators such as LM2931 that require more than 25 mA when powered at 1V. With RCX current limitation, this hog eats allenergy. (I was caught with this one...)∙Q1 switches power on and off for GP2D12. At 35mA current, I originally used a plain vanilla BC548. My sensor began to work with it, but exhibitedstrange behavior. Looking to GP2D12 power supply I then discovered 2Vdips! I then looked at the GP2D12 consumption and discovered that it waspulsed (220mA pulses 1/8th of time, superimposed to a 8mA constantcurrent. See oscilloscope captures here ). At such a current, BC548 has alow gain, and since I couldn't lower base resistor R1 (main current drainduring capacitor charge) I used a high performance Zetex transistor, ZTX718that offers high gain at high current (other similar devices can work!).C2 stabilizes U1 and helps absorb peaks of current. A low ESR versionwould be better (see "grass" on 5V output when GP2D12 works).Main Component Datasheets (PDF Format)GP2D12 PDF datasheetGP2D12(old documentation, 900k)BC5481N5819TC55RP5000 BC558 ZTX718Oscilloscope Screen CapturesSee them here.Building the Sensor Interface Module: Photo GalleryThe interface module is build on a 1"square proto-boardTop viewTop view, with components identificationBottom view. A notch in circuit is cut forbig C1. A single layer circuit boardwould be very easy to draw.Everything fits in 3 hollowed 4x2 bricks Pretty tight !Complete module. GP2D12 fixations were cut to match Lego brick width.Ready to work !The PrototypeA much more ugly circuit......mounted on a test vehicleA Real Application: Wall FollowerSee it here !Test programsHere are some NQC test programs (they require RCX 2.0 firmware that you can get here ).Distance vs. Sensor ReadingLinearized curve: 1000/(distance-2) vs. Sensor Reading + Best Fit Line Revision History∙4/26/01 - Created.∙5/08/01 - Added full size images of circuit boad construction.。
最新三角法测距

三角法红外测距原理介绍工作原理:Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。
反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:Sharp GS2XX系列的传感器的输出是非线性的。
没个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,解决这个方法也不是没有,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
如图3所示:图2:Sharp GP2D12输出曲线第7章职业应用领域5——表达式与跟踪技术应用【职业能力目标】本章对After Effects CS4 中的“表达式与跟随技术”进行了介绍,重点讲解创建表达式的方法、编辑表达式方法、表达式应用举例,以及运动跟踪中的单点跟踪和多点跟踪、稳定跟踪、父子绑定跟踪、表达式跟踪等技术。
红外测距传感器的基础知识

参知政事范仲淹等人遭谗离职,欧阳修上书替他们分辩,被贬到滁州做了两年知州。到任以后,他内心抑郁,但还能发挥“宽简而不扰”的作风,取得了某些政绩。《醉翁亭记》就是在这个时期写就的。目标导学二:朗读文章,通文顺字1.初读文章,结合工具书梳理文章字词。2.朗读文章,划分文章节奏,标出节奏划分有疑难的语句。节奏划分示例
红外测距传感是用红外线为介质的测量系统, 红外传感技术已经在现代科技、国防和工农业等 领域获得了广泛的应用。
红外测距的工作原理
红外测距的分类
按照功能可分成五类:
(1)辐射计,用于辐射和光谱测量; (2)搜索和跟踪系统; (3)热成像系统; (4)红外测距和通信系统; (5)混合系统。
股清幽的香味,好的树木枝叶繁茂,形成浓郁的绿荫。天高气爽,霜色洁白,泉水浅了,石底露出水面,这是山中四季的景色。意译法:太阳升起,山林里雾气开始消散,烟云聚拢,山谷又开始显得昏暗,清晨自暗而明,薄暮又自明而暗,如此暗明变化的,就是山中的朝暮。春天野花绽开并散发出阵阵幽香,夏日佳树繁茂并形成一片浓荫,秋天风高气爽,霜色洁白,冬 日水枯而石底上露,如此,就是山中的四季。【教学提示】翻译有直译与意译两种方式,直译锻炼学生用语的准确性,但可能会降低译文的美感;意译可加强译文的美感,培养学生的翻译兴趣,但可能会降低译文的准确性。因此,需两种翻译方式都做必要引导。全文直译内容见《我的积累本》。目标导学四:解读文段,把握文本内容1.赏析第一段,说说本文是如何引
GP2A200LCS0F,全新进口原装,专业代理,短程红外测距传感器

GP2A200LCS0F,全新进⼝原装,专业代理,短程红外测距传感器2-22mm红外测距传感器,⽇本夏普专业代理,全新进⼝原装,常年备货,专业代理您还为机器⼈制造、门禁系统开发、各种测距需要⽽找不到相关元器件发愁吗?别愁,北京冠宇铭通科技有限责任公司,长期专业销售夏普、飞思卡尔传感器!成就您机器⼈制造、门禁系统开发、检测距离的梦想!不同测距元器件公司现货,价格优,质量保障,欲购从速!GP2Y0D340K 测距 40cmGP2Y0D21YK0F测距 24cmGP2Y0A21YK0F 测距10 ~ 80cmGP2Y0A02YK0F 测距20 ~ 150cmGP2Y3A003K0F 测距40 ~ 300cmGP2Y3A002K0F 测距20 ~ 150cmGP2Y3A001K0F测距 4 ~ 30cmGP2Y0D805Z0F测距5cmGP2Y0D310K测距10cmGP2D12J0000F测距 10 ~ 80cmGP2Y0D810Z0F测距10cmGP2Y0D02YK 测距80cmGP2D120 测距4-30cmGP2Y0D413K0F 测距13cm 数字输出GP2Y0A710K0F测距100-550cmGP2Y0A700K0F 测距100-550cmGP2A200LCS0F 测距0.079" ~ 0.866" (2mm ~ 22mm)ADJGP2A200LCS0F 2-22mmGP2A25J0000F 测距1MM-9MMGP3Y0D012 测距4-150cmGP2Y1010AU0F 0.5V/(0.1mg/m3)GP2Y0D340K 40cmGP2D150AJ00F 15cm测距联系⼈:徐先⽣⼿机:151********电话:010-********QQ:183183890。
基于CAN总线的汽车多功能监测仪

基于CAN总线的汽车多功能监测仪摘要:设计了一个基于CAN总线的汽车多功能监测系统,该系统为运行中的汽车提供了一个数据采集和显示的平台。
系统主要由传感器、CAN总线以及芯片MC9S12XS128组成,CAN总线将传感器采集的信息传递给芯片MC9S12XS128,同时又将芯片MC9S12XS128的处理结果传送给显示器。
驾驶员可以通过该系统看到汽车在行驶过程中的一系列数据,实验表明,基于CAN总线的汽车多功能检测仪性能卓越、可靠性高。
关键词:CAN总线;汽车测速;传感器;数据采集0 引言本系统通过多种传感器采集汽车在行驶中的各种数据,经过数据处理芯片MC9S12XS128处理后通过显示器显示给驾驶员。
系统中的数据通过CAN总线进行传输,这样就可以免除数据传输线冗长,既有节省车内空间又保证了数据的可靠性。
1 CAN总线简介在当前的汽车行业中,由于安全、舒适、方便、低公害、低成本的要求,出现了各种各样的电子控制系统,由于这些系统对通信所用的数据类型以及可靠性的要求有所不同,使得汽车中的电子控制系统由多条总线构成,为解决这一难题德国Bosch公司开发出的面向汽车的CAN 通信协议,这样不但可以减少线束的数量,而且可以通过多个LAN,进行大量数据的高速通信。
CAN 通过ISO11898 及ISO11519 进行了标准化,现在已经发展成为欧洲汽车网络的标准协议。
按照现场总线透明设计和柔性设计的要求来说,CAN总线分为了3个层次:CAN对象层、CAN传输层、CAN物理层[3]。
2 测速原理汽车测速的原理是公式v =r[]t。
假定轮圈的周长为L,在轮圈上安装m个永久磁铁,则测得的里程值最大误差为L/m。
经综合分析,本设计中取m=1。
当轮子每转一圈,通过开关型霍尔元件传感器采集到一个脉冲信号,并输入给处理器,传感器每获取一个脉冲信号即对系统提供一次计数中断。
每次中断代表车轮转动一圈,中断数n与轮圈的周长L的乘积为里程值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外测距传感器:Sharp红外传感器的原理以及使用技巧
2009-02-23 21:20
在过去几年中,Sharp开发了很多种红外距离传感器。
这些传感器不但体积小,功耗也很低。
这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。
工作原理:
Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。
反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:
Sharp GS2XX系列的传感器的输出是非线性的。
没个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
图2:Sharp GP2D12输出曲线
从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,解决这个方法也不是没有,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
如图3所示:
图3:可以避免探测误差的安装图示
型号对比:
目前Sharp的红外线传感器有如下几种类型:
GP2D02 (串口输出)探测范围 10cm-80cm
GP2D05 (数字输出)探测范围固定的24cm
GP2D12 (模拟输出)探测范围 10cm-80cm
GP2D15 (数字输出)探测范围 24cm
GP2D120 (模拟输出)探测范围 4cm-30cm
GP2YOAO2YK (模拟输出)探测范围 20cm-150cm
GP2Y0D02YK (数字输出)探测范围 80cm
所有的模拟输出,其输出电压和距离成反比,数字输出只能检测在范围内物体是存在还是不存在,而不能提供距离的检测。