基于Matlab与Labview的柔索并联机器人监控系统联合仿真
基于Matlab技术的4_RP_RR_R并联机构的运动仿真
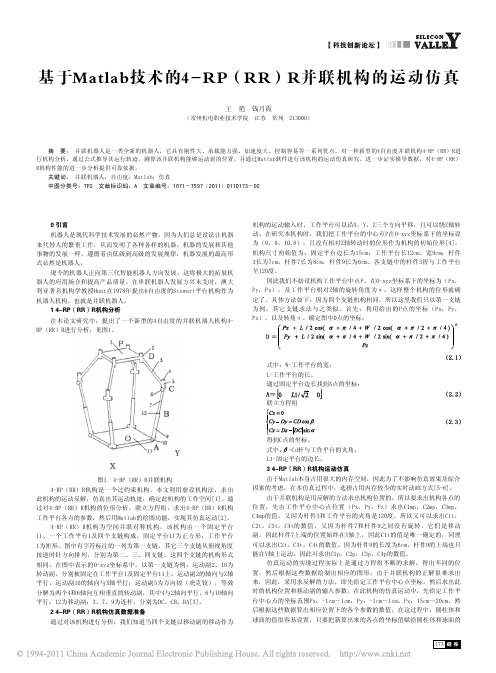
基于Matlab技术的4-RP(RR)R并联机构的运动仿真王 艳 钱月霞(常州机电职业技术学院 江苏 常州 213000)摘 要: 并联机器人是一类全新的机器人,它具有刚性大、承载能力强、加速度大、控制容易等一系列优点,对一种新型的4自由度并联机构4-RP (RR )R 进行机构分析,通过公式推导其运行轨迹,测算该并联机构能够运动到的位置,并通过Matlab 软件进行该机构的运动仿真研究,进一步证实推导数据,对4-RP (RR )R 机构性能的进一步分析提供可靠依据。
关键词: 并联机器人;自由度;Matlab ;仿真中图分类号:TP2 文献标识码:A 文章编号:1671-7597(2011)0110173-020 引言机构的运动输入时,工作平台可以沿X ,Y ,Z 三个方向平移,且可以绕Z 轴转动。
在研究本机构时,我们把工作平台的中心点P 在O-xyz 坐标系下的坐标设机器人是现代科学技术发展的必然产物,因为人们总是设法让机器为(0,0,10.8),且没有相对Z 轴转动时的位形作为机构的初始位形[4]。
来代替人的繁重工作,从而发明了各种各样的机器。
机器的发展和其他机构尺寸初始值为:固定平台边长为15cm ;工作平台长12cm 、宽9cm ;杆件事物的发展一样,遵循着由低级到高级的发展规律,机器发展的最高形3长为7cm ,杆件7长为8cm ,杆件9长为6cm 。
各支链中的杆件3皆与工作平台式必然是机器人。
呈120度。
现今的机器人正向第三代智能机器人方向发展,这将极大的拓展机因此我们不妨设机构工作平台中点P ,在O-xyz 坐标系下的坐标为(Px ,器人的应用场合和提高产品质量。
在串联机器人发展方兴未艾时,澳大Py ,Pz ),及工作平台相对Z 轴的旋转角度为α,这样整个机构的位形就确利亚著名机构学教授Hunt 在1978年提出6自由度的Stewart 平台机构作为定了。
具体方法如下:因为四个支链机构相同,所以这里我们只以第一支链机器人机构,也就是并联机器人。
LabVIEW与MATLAB联合编程
LabVIEW与MATLAB联合编程
LabVIEW与MATLAB的联合编程⼀般可以通过2种⽅式进⾏:
1. 公式节点[Formula Node]
2. MATLAB脚本节点[MATLAB script node]
1. 公式节点[Formula Node]
位置:函数选板->数学->脚本与公式->公式节点
在程序框图上计算数学公式和类似于C语⾔的表达式。
可在公式中使⽤下列内置函数:abs、acos、acosh、asin、asinh、atan、atan2、atanh、ceil、cos、cosh、cot、csc、exp、expm1、floor、getexp、getman、int、intrz、ln、lnp1、log、log2、max、min、mod、pow、rand、rem、sec、sign、sin、sinc、sinh、sizeOfDim、sqrt、tan和tanh。
2. MATLAB脚本节点[MATLAB script node]【推荐√】
位置:函数选板->数学->脚本与公式->脚本节点-> MATLAB脚本节点
调⽤MATLAB®软件脚本服务器执⾏脚本。
这意味着我们可以采⽤MATLAB语⾔进⾏编程。
下⾯⽤⼀个例⼦展⽰如何使⽤MATLAB脚本节点:
我们需要产⽣⼀个正弦信号,程序框图如下所⽰
结果前⾯板所⽰
注意:在退出LabVIEW前,请不要⾃⾏关闭MATLAB窗⼝。
基于LabVIEW 和PXI平台的6- DOF并联机器人控 制系统的开发
基于LabVIEW 和PXI平台的6- DOF并联机器人控制系统的开发"通过使用 LabVIEW和 LabVIEW实时模块,我们构成了一种基于模型的开放式运动控制系统,使系统具有极好的人机交互性、直观性和齐全的功能。
基于 LabVIEW的脉搏信号检测与分析系统。
"- 伟军张, 上海交通大学机器人研究所The Challenge:应用成熟的NI系列产品快速构建一套功能完善、性能优越、人机界面友好的开放式多自由度并联机器人数控系统,不仅具有学术意义更具有实际意义。
一个完全对应的机器人系统Author (s):伟军张 - 上海交通大学机器人研究所志成万 - 上海交通大学机器人研究所俊陶 - 上海交通大学机器人研究所The Solution:以6-PPPS六自由度并联机器人为对象,以PXI- 1042内嵌 PXI-8186控制器为核心,采用 PXI-7356多轴运动控制卡和 UMI-7774接口板驱动6个伺服电机,采用多轴控制卡的配套软件和 LabVIEW 8.0实现电机完全同步、并联机器人的多轴协调轨迹控制、轨迹曲线选择与显示等关键技术,采用 PXI-6511数字输入卡实现操作按钮及状态指示等开关量控制,并利用 PID软件包和RT 模块的强大功能实现快速开发。
软件开发上采用了用户事件技术、通知或队列技术等LabVIEW的高级编程技术,解决了各用户界面和各模块之间的实时切换;各种变量的应用则实现不同模块之间的信息传递和共享;VI 动态载入技术,实现子VI的即调即用和多面板的动态载入及界面重用;充分利用 LabVIEW强大的外部接口能力,实现了动态链接库(DLL)和Windows API的调用,并嵌入了Matlab并联机器人运动学模型,使程序不但具有强大的功能,也使得复杂的计算更为快捷。
Jianzheng Zhang - Shanghai Jiao Tong University, School of Mechanical Engineering介绍:并联机器人以其刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好等优点,不仅仅是当前机器人研究领域的热点,而且正逐渐走出实验室被工业界所认可。
基于MATLAB的机器人柔性手臂控制系统设计与仿真【毕业作品】

任务书设计题目:基于MATLAB的机器人柔性手臂控制系统设计与仿真1.设计的主要任务及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,在深入了解反馈控制系统工作原理的基础上,掌握机械系统建模、分析及校正环节设计的基本过程;初步掌握运用MATLAB/Simulink相关模块进行控制系统设计与仿真的方法,为学生在毕业后从事机械控制系统设计工作打好基础。
2.设计的基本要求和内容(1)根据已有的机器人柔性手臂系统相关资料,对其结构特点及工作原理进行分析;(2)建立柔性手臂系统的数学模型;(3)应用极点配置对系统进行状态反馈设计;(4)运用MATLAB/SIMULINK对系统进行仿真计算;(5)通过动态仿真设计优化系统参数,对反馈系数K进行确定;3.主要参考文献[1] 刘白燕等编,机电系统动态仿真-基于MATLAB/SIMULINK[M].北京:机械工业出版社,2005.7[2] 王积伟,吴振顺等著,控制工程基础[M].北京:高等教育出版社2001.8[3] (日)末松良一. 机械控制入门[M].北京:科学出版社,2000[4] 徐昕等著. MATLAB工具箱应用指南.北京:电子工业出版社,2000 4.进度安排基于MATLAB的机器人柔性手臂控制系统设计与仿真摘要:机械臂未来的发展趋势是高速、高精度和轻型化、操作灵活的柔性机械臂。
柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性运动。
柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度。
本设计结合机器人柔性手臂的结构特点,对机器人柔性手臂进行了受力分析,建立了柔性手臂系统的集中参数模型。
对柔性手臂系统的特性、系统的可控制性和可观测性进行了分析,用极点配置求取状态反馈系数K对系统进行反馈。
使柔性手臂系统的振动快速达到稳态,用MATLAB仿真确认控制效果。
关键词:柔性机械臂,控制系统,MATLAB仿真Design and simulation system for flexible manipulator control basedon MATLABAbstract:The trend of the development of mechanical arm is high speed, high precision and light-duty, flexible operation of the flexible manipulator. The dynamics of flexible manipulator system is characterized by a wide range of rigid motion at the same time, with flexible arm slightly elastic movement. The elastic vibration of flexible arm will greatly influence the mechanical arm at the ends of the positioning accuracy. This design with the structure characteristics of a flexible robot arm, has carried on the stress analysis of flexible robot arms, established the lumped parameter model of the flexible arm system. Characteristics of the flexible arm system, system controllability and observability are analyzed, using pole assignment for state feedback coefficient K to feedback system. To make the vibration of the flexible arm system to reach steady state quickly, MATLAB simulation confirm the control effect.Key words:Flexible manipulator, Control system, MATLAB simulation目录1概述 (1)1.1引言 (1)1.2研究目的及意义 (2)1.3国内外柔性机械臂的研究现状 (3)1.3.1柔性臂动力学建模的研究现状 (3)1.3.2柔性机械臂的主动控制 (4)2柔性手臂的建模过程 (5)2.1柔性手臂对机器人的重要性 (5)2.2柔性手臂的试验模型 (6)2.3状态方程的建立 (8)2.3.1集中参数模型 (8)2.3.2系统参数和变量的定义 (8)2.3.3数学模型 (10)3系统的特性分析 (13)3.1实验参数 (13)3.2比例变换 (14)3.3系统矩阵的特征值和手臂的振型 (15)3.4可控制性和可观测性 (20)4用极点配置法进行设计和仿真 (22)4.1状态反馈设计 (22)4.2控制系统设计方法选择 (22)4.3利用仿真确认控制效果 (24)5控制系统的实现 (26)总结 (27)参考文献 (29)致谢 (30)附录 (31)1 概述1.1 引言随着人类科技水平的不断进步,机器人的应用越来越广泛。
LabVIEW与机器人视觉实现智能机器人的感知与控制

LabVIEW与机器人视觉实现智能机器人的感知与控制实现智能机器人的感知与控制是当前科学技术领域研究的热点之一。
在这一领域中,LabVIEW与机器人视觉技术被广泛应用,为智能机器人的感知与控制提供了强大的支持。
本文将就LabVIEW与机器人视觉实现智能机器人的感知与控制进行详细介绍。
一、LabVIEW与机器人视觉技术的基本原理LabVIEW,全称是Laboratory Virtual Instrument Engineering Workbench(实验室虚拟仪器工程化平台),是一种高度可扩展的系统设计软件,可以用于测量与控制、自动化测试和监视等领域。
而机器人视觉技术,是指利用机器视觉对机器人进行环境感知、目标识别和位置定位等操作的技术。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知与控制。
LabVIEW作为一个强大的开发平台,提供了丰富的功能库和开发工具,可以方便地进行图像处理和控制算法的开发与调试。
而机器人视觉技术则借助图像采集装置(如摄像头)获取周围环境的图像信息,并通过图像处理算法实现对图像的解析和分析,从而实现对环境和目标的感知。
LabVIEW通过其可视化的编程环境与机器人视觉技术的结合,不仅使得开发过程更加简便高效,还提高了机器人感知与控制的准确性和稳定性。
二、LabVIEW与机器人视觉实现智能机器人的感知智能机器人的感知主要包括环境感知和目标感知两个方面。
环境感知是指机器人对周围环境的感知和识别,目标感知是指机器人对周围目标的感知和识别。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知功能。
1. 环境感知环境感知是指机器人对周围环境的感知和识别。
通过使用LabVIEW搭建的图像处理算法,机器人视觉系统可以对环境中的物体进行分析和识别,并将感知到的环境信息传递给控制系统。
例如,机器人可以通过摄像头获取环境中的图像信息,然后使用LabVIEW进行图像处理,识别出环境中的墙壁、障碍物等,并基于这些信息来规划自己的移动路径。
一种基于LabVIEW和MATLAB混合编程的视觉检测系统关键技术研究

一种基于LabVIEW和MATLAB混合编程的视觉检测系统关
键技术研究
陈思宇;慕丽;王欣威
【期刊名称】《机床与液压》
【年(卷),期】2022(50)12
【摘要】传统的视觉检测系统不仅浪费时间和人力,检测精度也远远不足,故提出一种视觉检测系统。
该检测系统主要以涂层展开板为研究对象,在流水线系统上对其进行在位检测。
首先进行了检测系统总体方案设计,在硬件方面主要介绍了该检测系统相机、镜头、光源的选取以及调试;软件方面主要介绍了相机的标定、图像的预处理和增强、边缘检测等关键技术。
根据谱带的形状特征,提出一种三次样条插值法与多项式拟合法相结合的算法来提取出各个谱线分割线的边缘点,同时在LabVIEW环境下进行MATLAB编程,进而提高算法效率。
然后将MATLAB计算出的坐标值通过上位机发送给数控机床,数控机床对得到的数据进行实时处理,从而对同一颜色区域进行刮取。
与人工检测进行对比,该检测系统在检测精度和速度上都优于传统方法。
【总页数】6页(P94-99)
【作者】陈思宇;慕丽;王欣威
【作者单位】沈阳理工大学机械工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于LabVIEW和Matlab混合编程的竹片检测系统设计
2.基于LabVIEW和Matlab混合编程的滚动轴承故障诊断系统
3.基于LabVIEW与MATLAB混合编程的手势识别系统
4.一种基于LabView与Matlab的混合编程技术的试飞监测系统设计
5.基于LabVIEW和MATLAB混合编程的实时自适应滤波系统
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AMESim、MATLAB_与LabVIEW_的联合仿真虚拟平台技术

第 22卷第 10期2023年 10月Vol.22 No.10Oct.2023软件导刊Software Guide基于AMESim、MATLAB与LabVIEW的联合仿真虚拟平台技术董壮壮,王兆强,孙令涛,陆阳钧(上海工程技术大学机械与汽车工程学院,上海 201620)摘要:针对AMESim和MATLAB/Simulink的机电液系统联合仿真过程中参数设置较为繁琐、仿真结果可视化效果不够直观等问题,基于FMI标准化接口和ActiveX技术,利用LabVIEW进行人机交互界面设计与数据交互,研究了一种可定制化、参数设置集中化且仿真结果可视化的仿真虚拟平台技术。
初步应用实验结果表明,该虚拟平台可简便地对联合仿真模型进行参数设置与数据交互,结果准确、仿真效果直观,且仿真报告可自动化输出,有利于提高工作效率。
关键词:联合仿真;人机交互;多物理域;虚拟平台;数据交互DOI:10.11907/rjdk.231493开放科学(资源服务)标识码(OSID):中图分类号:TP391.9 文献标识码:A文章编号:1672-7800(2023)010-0042-07Joint Simulation Virtual Platform Technology Based on AMESim,MATLAB and LabVIEWDONG Zhuangzhuang, WANG Zhaoqiang, SUN Lingtao, LU Yangjun(School of Mechanical and Automotive Engineering, Shanghai University of Engineering Science, Shanghai 201620, China)Abstract:In response to the problem of cumbersome parameter settings and insufficient visualization of simulation results in the joint simu⁃lation process of AMESim and MATLAB/Simulink electromechanical hydraulic systems,a customizable,centralized parameter settings,and visualized simulation results simulation virtual platform technology was studied using LabVIEW based on the standardized interface of FMI (Functional Mock up Interface) and ActiveX technology for human-machine interaction interface design and data exchange. The pre⁃liminary application experimental results showed that the virtual platform can easily set parameters and interact with data for joint simula⁃tion models, with accurate results and intuitive simulation effects. The simulation report can be automatically output, which is conducive to improving work efficiency.Key Words:joint simulation; human-computer interaction; multi-physical domain; virtual platform; data interaction0 引言目前,国内外仿真软件种类越来越多,仿真技术已经广泛地应用于汽车制造[1-4]、工程机械[5]、航空航天[6-7]等领域。
基于Labview_Matlab的人脸识别系统设计与实现

超浅埋段长。隧道通过金家街小学操场 及教学楼和简易房。K0+49.97- K0+253, 地表杂填土厚 0.9~4.8m,基岩顶面距隧道顶 部 1.5~6.2m。 2.4 地面建筑及危房覆盖率高
在 K0+173~K0+253 里程上,沿隧道轴 线宽 80m 范围内居民密集,地面建筑多为 1-6 层砖混结构旧房及简易平房砌筑结构,为七十 年代初期建筑。
(2)爆破后沿岩体的切割面(或称爆裂面)应 具有一定的平整度,并能保持原岩体自身的稳 定性, 从而保证爆破效果及隧道内的安全, 即 光面和稳定控制爆破。 3.2 控制爆破基准
根据《爆破安全规程》( G B 6 7 2 2 - 8 6 ) 对
(1l) 其中 为混合成分的比例因子,即用高斯 混合模型来对概率分布矩阵 B 建模 和 分 别为高斯混合模型的均值和协方差矩阵
图像。
2.4 特征提取
首先对合法人员进行图像采集建立以每
人 5 幅不同表情像的归一化图像为标准的图
像库, 再对库进行 H M M 训练, 就是要为每个
类别确定一组经过优化的 H M M 参数, 每个模
型可以用单幅或多幅图像进行训练,训练步骤
如下:
(1)对人脸进行Gabor小波变换,求出特征
结,并将其作为观测向量,即
1 引言
随着城市交通及地铁隧道的大量修建,穿 越密集建筑物(住宅区)进行小净距浅埋隧道施 工已成为建筑施工企业和工程技术人员亟待 攻克的科技难题。大连市椒金山新建隧道采 用暗挖法施工, 通过优化控制爆破方案, 合理 选择爆破参数对获取理想震动效果,控制地面 沉降,减少围岩扰动及地表建筑物影响起到了 关键作用。该隧道的控制爆破施工是在交通 不中断、相邻隧道净间距小、洞顶覆盖层薄 的困难条件下进行的,本项目控制爆破技术的 成功应用标志着我国超长小净距隧道控制爆 破施工的一个重大突破。
Matlab和LabVIEW混合编程的实现
欢迎订阅欢迎撰稿欢迎发布产品广告信息E I C Vo l .15 2008 No.2 101 图3 Soble 算子处理图 图4 二值图 3 二值化整幅图像画面仅有黑白二值的图像就是二值化图像。
二值化的目的是将采集得到的多层次灰度图像处理成二值图像,以便于分析理解和识别并减少计算量。
对图像进行二值化处理的关键是阈值的合理选取。
阈值设置过小易产生噪声;阈值设置过大会降低分辨率,使非噪声被视为噪声而滤掉[5]。
本文采用的是最优阈值原理:统计每幅图像灰度的分布特性,利用类别方差作为判据,选取使类间方差最大值作为选定的阈值。
二值图如图4所示。
4 结束语本文通过对运动车辆的视频进行中值滤波,Soble 算子提取图像的边缘信息,接着进行二值化处理,为以后的识别提供了良好的基础。
利用VC ++编制人机交互友好界面,实现数字逻辑变换及道路图像处理。
该算法具有良好的实时性和可靠性。
□参考文献[1]布洛基,布图兹等.智能车辆[M ].人民交通出版社,2002.11.[2]高守传,姚领田等.V isual C ++实践与提高[M ].中国铁路出版社,2005.12.[3]王晓东,丁冬花.实时车辆检测和跟踪系统设计[J ].微计算机信息,2006,11(2):237-239.[4]王艳春,李建军,何鹏,尹明.公路交通管理中行驶车辆自动识别技术研究[J ].微计算机信息,2006,11(2):193-195.[5]王荣本,游峰,崔高峰等.基于计算机视觉高速车辆的道路识别[J ].计算机工程与应用2004,9(26):18-21.作者简介:胡会珍(1983-),女,汉族,硕士,主要研究方向为控制理论与控制工程,现中北大学在读硕士研究生;黄晋英(1971-),女,汉族,副教授/硕士生导师,主要从事智能控制,模式识别研究。
基金资助:山西省青年科技基金(编号:20051015)收稿日期:2007210230(7672)文章编号:167121041(2008)022*******M a tla b 和La bV I E W 混合编程的实现李霄燕,杨俊宇,赵 佳(长春工业大学电气与电子工程学院,长春130012)摘要:基于M a tla b 强大的计算功能和La bV I EW 的界面良好的特点提出用M a tla b 和La bV I EW 混合编程,将二者有机结合起来,使在锅炉管板焊接中,能够轻松得到不同位置焊接管口的轨迹方程,实现自动焊机对焊接轨迹的良好控制。
LabVIEW与MATLAB的结合强大的数据分析工具

LabVIEW与MATLAB的结合强大的数据分析工具LabVIEW与MATLAB的结合:强大的数据分析工具在科学研究和工程领域,数据分析是十分重要的环节。
为了更好地分析和处理数据,科学家和工程师们经常使用多种工具和软件。
LabVIEW和MATLAB是两个常用且功能强大的数据分析工具。
本文将探讨LabVIEW和MATLAB的结合,介绍它们在数据分析方面的优势。
一、LabVIEW介绍及其在数据采集和控制方面的应用LabVIEW是国际上广泛使用的一种图形化编程环境。
它以数据流为基础,在数据的采集、控制和处理方面具有独特的优势。
LabVIEW可以将传感器和仪器的数据直接输入到计算机,通过图形化界面进行实时监控和控制。
它提供了丰富的工具箱和模块,使得用户能够轻松地进行数据采集、处理和控制。
在数据分析方面,LabVIEW提供了强大的信号处理和模拟工具。
用户可以通过图形化编程方式,快速构建数据分析的算法和模型。
LabVIEW支持多种图形化表示方式,可以清晰地展示数据的变化和趋势。
用户还可以根据需要,将数据导出到Excel、CSV等格式的文件中,方便与其他软件进行进一步的分析和处理。
二、MATLAB介绍及其在数学计算和数据分析方面的应用MATLAB是一种数学计算和编程环境,被广泛应用于科学、工程和商业领域。
它提供了丰富的数学函数和工具箱,支持矩阵运算和符号计算。
MATLAB的语法简洁明了,易于学习和使用,使得用户可以根据自己的需求,编写复杂的数据分析和算法。
在数据分析方面,MATLAB提供了丰富的统计和机器学习工具。
用户可以使用MATLAB进行数据预处理、特征提取、聚类分析和分类模型的构建。
MATLAB还支持数据可视化,用户可以通过绘制图表和曲线,更直观地展示数据的特征和规律。
此外,MATLAB还具有丰富的数据导入和导出功能,方便与其他软件进行数据交换和共享。
三、LabVIEW与MATLAB的结合:优势与应用案例LabVIEW和MATLAB作为两款独立的软件,在数据分析方面各有其优势。
基于LabVIEW 和Matlab的自动控制虚拟实验系统
基于LabVIEW 和Matlab的自动控制虚拟实验系统
陈飞;陈惠侠
【期刊名称】《实验科学与技术》
【年(卷),期】2009(7)1
【摘要】开发了基于LabVIEW和Matlab的自动控制虚拟实验系统,该实验系统包含了自动控制原理课程中常见的实验项目.实验系统采用LabVIEW和Matlab混合编程实现,利用LabVIEW设计用户图形界面,实现"虚拟仪器"的面板;利用Matlab 在后台提供算法供LabVIEW调用.从而实现了动态显示和仿真分析的有机结合.实际运行表明,该平台可以有效地提高实验的准确性和可靠性.
【总页数】3页(P75-77)
【作者】陈飞;陈惠侠
【作者单位】常熟理工学院信息与控制工程系,江苏,常熟,215500;常熟理工学院信息与控制工程系,江苏,常熟,215500
【正文语种】中文
【中图分类】TP391.9;G424.31
【相关文献】
1.基于LabVIEW的自动控制原理虚拟实验系统设计 [J], 刘清平
2.基于LabVIEW的自动控制理论虚拟实验系统开发 [J], 赵燕玉;杨洪柏;由路;吴慧群
3.基于LabVIEW的自动控制理论虚拟实验系统开发 [J], 赵磊;郭一军
4.基于LabVIEW的自动控制原理虚拟实验系统设计 [J], 吕恩胜
5.基于labview的自动控制原理虚拟实验系统 [J], 邢玲玲
因版权原因,仅展示原文概要,查看原文内容请购买。
labview与matlab的联合仿真过程详解

摘录一段自己毕业论文中关于LabVIEW与Matlab联合仿真的内容,仅供参考。
联合仿真实现的前提是LabVIEW与Matlab通信正常,注意事项见附录。
‐‐‐‐‐‐‐‐‐‐‐by 忧郁王子7858037072.2 方案二基于LabVIEW与Matlab的联合仿真2.2.1 方案简介本方案是基于LabVIEW与Matlab的联合仿真,主要目的是希望利用Matlab 强大的仿真工具箱-----Simulink进行建模,通过Matlab与LabVIEW进行通信,即进行数据的传输,数据的采集和处理在LabVIEW中进行。
[12]2.2.2 软件配置系统:win8软件配置:LabVIEW 2011 Developer SuiteMatlab 2010aSimulation Interface Toolkit Version 20112.2.3 实现方法一、配置Simulink文件1、启动Matlab2010a,命令窗口显示如下,此消息表明,SIT Server正在运行。
图2.9 Matlab与LabVIEW通信2、在命令窗口输入simulink,调用Simulink Library Brower窗口。
3、打开sources库,将Sine Wave 和In1模块分别放入新建的model文件中,相同的方法,放入Sum,Out1到model文件。
[4]4、找到NI SignalProbe库,在model文件窗口中放入SignalProbe模块。
建立的model文件如下所示。
图2.10 simulink模型图二、设置仿真参数打开Simulation下的Simulation parameters,设置开始时间和停止时间等相关参数。
三、建立Host VI1、打开LabVIEW,新建一个VI。
2、选择Tool-SIT Connection Manager,启动对话框,在对话框中建立LabVIEW 控件映射/指标和模型参数/信号。
MATLAB和LabVIEW混合编程及在控制系统中的应用
2009年10月第37卷第10期机床与液压MACH I N E T OOL &HY DRAUL I CSOct 12009Vol 137No 110DO I:10.3969/j 1issn 11001-3881120091101066收稿日期:2008-10-22基金项目:国家自然科学基金资助项目(50875001)作者简介:胡佑兰(1986—),女,湖北松滋人,硕士研究生,主要研究方向为机电控制。
E -m ail:wonderfu lhyl@yahoo 1com 1cn 。
MAT LAB 和Lab V I E W 混合编程及在控制系统中的应用胡佑兰,彭天好,朱刘英(安徽理工大学机械工程学院,安徽淮南232001)摘要:概述了MAT LAB 和Lab V I E W 两种编程语言的特点和四种混合编程的实现方法,结合典型控制系统实例,重点研究了使用MAT LAB Scri p t 节点进行混合编程的技术特点和设计方法,并与单独使用一种软件编程进行了对比分析。
结果表明,MAT LAB 和Lab V I E W 混合编程综合了两者的特点和优势,在工程控制系统中具有广泛的应用前景。
关键词:MAT LAB;Lab V I E W;混合编程;控制系统中图分类号:TP271;TP311 文献标识码:A 文章编号:1001-3881(2009)10-209-4M i xed Programm i n g w ith M ATLAB &LabV I E W and Its Appli ca ti on i n Con trol SystemHU Youlan,PENG Tianhao,Z HU L iuying(School ofMechanical Engineering,Anhui University of Science and Technol ogy,Huainan Anhui 232001,China )Abstract:The features of both Lab V I E W &MAT LAB p r ogra mm ing languages and f our methods t o achieve m ixed p r ogramm ing were su mmarized .The technical characteristics and design methods of usingMAT LAB scri p t node were discussed combined with a typ 2ical exa mp le of contr ol syste m,and then compared with the p r ogra m s usingMAT LAB or Lab V I E W al one .The results show thatMAT 2LAB and Lab V I E W m ixed p r ogramm ing makes full use of the advantages of both s oft w ares,and this method has a good p r os pect of ap 2p licati ons in contr ol syste m.Keywords:MAT LAB;Lab V I E W;M ixed p r ogra mm ing;Contr ol syste m0 引言对于任何一个控制系统,在系统设计和构成之前,必须对系统进行分析、综合和预测研究,从而得出系统的性能评价指标,如控制精度、响应速度和系统稳定性等。
Matlab和Labview混合编程在控制系统仿真中的应用
Matlab和Labview混合编程在控制系统仿真中的应用张烈平;牛秦洲
【期刊名称】《桂林理工大学学报》
【年(卷),期】2005(025)001
【摘要】控制系统控制算法的验证和系统性能指标的评价及比较等都要求先选择有效的计算机工具来进行仿真.分析了Matlab和Labview两种编程语言的特点和混合编程技术,结合直流电机旋转运动控制系统实例,采用两者混合编程技术实现了该控制系统的有效仿真,给出了混合编程的具体实现过程.实践证明,Matlab和Labview编程软件的结合运用,可实现优势互补,有利于控制系统程序的仿真,提高编程效率.
【总页数】3页(P81-83)
【作者】张烈平;牛秦洲
【作者单位】桂林工学院,电子与计算机系,广西,桂林,541004;桂林工学院,电子与计算机系,广西,桂林,541004
【正文语种】中文
【中图分类】TP391.9
【相关文献】
bVIEW 与 Matlab 混合编程在爆炸场测试中的应用 [J], 王瑞;张志杰;赵晨阳;穆欣荣
bVIEW与MATLAB混合编程在电力系统潮流计算中的应用 [J], 胡恒;汤允凤;
张航
bVIEW & MATLAB混合编程在控制工程基础实验中的应用 [J], 张晓旭;马萍;刘泽军;宋鹏
bVIEW与MATLAB混合编程在电力系统潮流计算中的应用 [J], 胡恒[1];汤允凤[1,2];张航[1]
5.MATLAB与LABVIEW的混合编程在飞机供电系统仿真中的应用 [J], 郭朋;陈勇;廖怡斐;余海
因版权原因,仅展示原文概要,查看原文内容请购买。
LabVIEW在机器人控制系统中的应用

LabVIEW在机器人控制系统中的应用随着科技的不断进步,机器人在各个领域的应用日益广泛。
在机器人控制系统中,LabVIEW作为一种强大的开发工具,被广泛应用于机器人的控制与监测。
本文将探讨LabVIEW在机器人控制系统中的应用,并分析其优势以及未来发展的前景。
一、LabVIEW在机器人控制系统中的概述LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种由美国国家仪器公司(National Instruments)开发的图形化编程语言和软件开发环境。
它以图形化的界面和数据流程方式,使得用户能够轻松地创建和调试复杂的控制系统。
在机器人控制领域,LabVIEW常被用于设计、模拟和实现机器人控制算法,并与机器人硬件进行交互。
二、LabVIEW在机器人控制系统中的应用领域1. 机器人路径规划和导航LabVIEW可以实时地监测机器人的位置和方向,利用其图形化编程能力,通过算法和传感器数据,实现对机器人的路径规划和导航。
通过LabVIEW开发的机器人控制系统,可以使机器人在未知环境中自主地避障、规划最优路径,并实现目标点的定位和导航。
2. 机器人手臂运动控制LabVIEW具有强大的控制算法和信号处理能力,可以用于机器人手臂的运动控制。
通过将机器人手臂关节的位置传感器和执行机构与LabVIEW进行连接,可以实现对机器人手臂的准确控制,并完成各种复杂任务,如抓取、装配等。
3. 机器人视觉系统机器人视觉系统在机器人控制中起着关键作用,而LabVIEW提供了丰富的图像处理和计算机视觉工具。
利用LabVIEW的视觉模块,可以实现对机器人视觉系统的集成和开发。
例如,通过图像识别和跟踪算法,实现机器人的目标检测和物体抓取。
4. 机器人协作与通信在多机器人协作和通信方面,LabVIEW同样具备强大的功能。
开发者可以使用LabVIEW来设计机器人之间的通信协议和数据传输方式。
MATLAB在并联机器人运动仿真中的应用
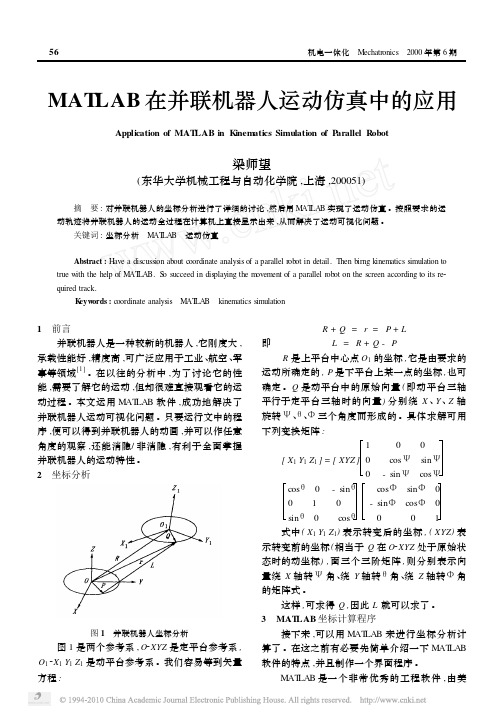
MAT LAB 在并联机器人运动仿真中的应用Application of MAT LAB in K inem atics Simulation of P arallel R obot梁师望(东华大学机械工程与自动化学院,上海,200051) 摘 要:对并联机器人的坐标分析进行了详细的讨论,然后用M AT LAB 实现了运动仿真。
按照要求的运动轨迹将并联机器人的运动全过程在计算机上直接显示出来,从而解决了运动可视化问题。
关键词:坐标分析 M AT LAB 运动仿真Abstract :Have a discussion about coordinate analysis of a parallel robot in detail.Then birng kinematics simulation to true with the help of M AT LAB.S o succeed in displaying the m ovement of a parallel robot on the screen according to its re 2quired track.K eyw ords :coordinate analysis M AT LAB kinematics simulation1 前言并联机器人是一种较新的机器人,它刚度大,承载性能好,精度高,可广泛应用于工业、航空、军事等领域[1]。
在以往的分析中,为了讨论它的性能,需要了解它的运动,但却很难直接观看它的运动过程。
本文运用MAT LAB 软件,成功地解决了并联机器人运动可视化问题。
只要运行文中的程序,便可以得到并联机器人的动画,并可以作任意角度的观察,还能消隐/非消隐,有利于全面掌握并联机器人的运动特性。
2 坐标分析图1 并联机器人坐标分析图1是两个参考系,O 2XYZ 是定平台参考系,O 12X 1Y 1Z 1是动平台参考系。
我们容易等到矢量方程:R +Q =r =P +L即L =R +Q -PR 是上平台中心点O 1的坐标,它是由要求的运动所确定的,P 是下平台上某一点的坐标,也可确定。
基于Labview与Matlab混合编程的应用研究 (1)
M ac hine B uildingA uto mation,D ec 2007,36(6):129~131,153基于Labview 与Matlab 混合编程的应用研究袁培铎(河海大学电气工程学院,江苏南京210098)摘 要:介绍了Labvie w 与Matlab 混合编程的方法,通过两个实例,介绍了利用Matlab scri p t 节点实现混合编程的应用。
Labview 与Matlab 编程软件的结合运用,可实现优势互补,有利于控制系统程序的仿真,提高编程效率,也是一条开发智能虚拟仪器的有效途径。
关键词:Labvie w;M atlab;Matlab scri p t 节点;混合编程;虚拟仪器中图分类号:TP311111 文献标识码:B 文章编号:167125276(2007)0620129203Research and Appli ca ti on of the M i xed Program m i n g Ba sed on Labv i ew and M a tl abY UAN Pei 2duo(Ho ha iU n i ve rs ity,N an ji ng 210098,C h i na )Abstract:This pap e r i n tr oduce s the m e tho ds o f how t o use Labvi ew and M a tl a b m i xe d p r o gramm i ng,a nd the app li ca ti o n s o f m i xedp r o g ramm i ng i n the t w o e xam p l e s of M a tl a b sc ri p t no de.I t s i m p li fi e s the p r o gramm i ng and i m p r o ve s p r o gramm i ng effi c i ency by the u se of Labvi ew a nd M a tl a b m i xe d p r og ramm i ng,w h i ch is a lso a n e ffe c ti ve w ay t o de ve l o p i nte lli gen t visua l i n s trum e nts.Key words:La bvi ew;M a tl a b;M a tl a b sc ri p t no de;m i xe d p r o gramm i ng;visua l i ns trum e n ts0 引言在工程领域中,Labvie w 和M atlab 是倍受程序开发人员青睐的两种语言。
MATLAB与labview联合仿真方法

MATLAB与labview联合仿真方法鉴于LabVIEW和MATLAB的优点,本文介绍了通过ActiveX技术,在LabVIEW(Ver6.1)中调用和操作MATLAB(Ver6.5)的方法,实现LabVIEW和MATLAB的混合编程,充分发挥两者的优势。
先说一下两种方法的优缺点:2.3 两种调用方法的比较(1)MATLAB Script节点具有多输入、多输出的特点,一次处理的信息量要以很大。
MATLAB 脚本可以先在MATLAB下调试。
无误后再导入到MATLABSeript节点中。
MATLAB Script节点对输入、输出数据的类型有明确的要求。
只有LabVIEW中的数据类型与MATLAB中的数据型相匹配,才能进行数据传输。
使用MATLAB Script节点的方法,快捷方便,但不利于较大的应用程序开发。
当需要使用时,可将其模块化,采用主程序动态加载。
(2)使用ActiveX函数模的方法,具有对MATLAB更强的控制能力。
如随时打开和关闭MATLAB,隐藏在务栏中的MATLAB图标,与MATLAB进行字符数组传输,这些都是MATLAB Script节点都不具有的。
使用ActiveX函数模板时,经常会遇到数据类型的转换,尤其是变体(Variant)与其他类型的转换。
当高用大型算法时,必须明确输入、输出数据的具体类型,而且要尽量减少数据传输量和启动MATLAB自动化服务器的次数ActiveX函数模板,适于较大的应用程序开发。
在LabVIEW顺序结构中,不提供使用。
原因是顺序结构妨碍了作为LabVIEW优点之一的程序并行运行机制,而且MATLAB自动化服务器启动也需要一定时间,这会使整个程序不能及时处理其它的用户操作。
总之,两种调用方法其自身的优势和不足。
在开发一个大的复杂应用程序时,综合不同的应用要求,合理选择可以显著提高开发效率。
采用虚拟仪器技术,通过LabVIEW构建测试仪器开发效率高、可维护性强、测试精度、稳定性和可靠性能够得到充保证;具有很高的性价比,节省投资,但于设备更新和功能扩充。
基于Multibody的并联柔索机器人建模与仿真
基于Multibody的并联柔索机器人建模与仿真
邹宇鹏;吴祥淑;张宗源;张际平;顾学斌;李万哲;吴宝贵
【期刊名称】《实验技术与管理》
【年(卷),期】2022(39)7
【摘要】MATLAB/Multibody建模工具为科学研究和创新型教学提供了便捷高效的虚拟仿真平台。
该文以3R3T并联柔索机器人的理论分析及建模仿真为例,首先介绍并联柔索驱动上肢康复机器人的总体结构和构型,并对3R3T并联柔索机器人进行运动学分析和轨迹规划;进一步基于Multibody建模工具构建3R3T并联柔索机器人多体动力学模型;最后联合运动学模型与Multibody虚拟样机模型进行仿真。
仿真结果验证了运动学模型的准确性以及利用Multibody进行虚拟仿真的可行性。
利用Multibody进行建模分析,为机构运动学、动力学等理论分析的实现提供了更便捷的平台,对虚拟仿真教学资源的建设有重要意义。
【总页数】7页(P92-97)
【作者】邹宇鹏;吴祥淑;张宗源;张际平;顾学斌;李万哲;吴宝贵
【作者单位】中国石油大学(华东)机电工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种柔索并联机器人的动力学建模与主动控制
2.一种空间3DOF并联柔索驱动机器人仿真研究
3.基于Matlab与Labview的柔索并联机器人监控系统联合仿真
4.柔索驱动并联机器人动力学建模与数值仿真
5.6自由度柔索并联机器人的动力学建模与抗扰控制
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
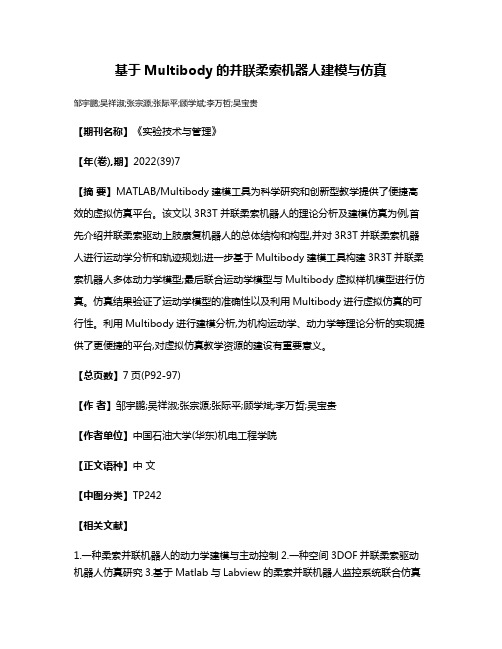
图 3 柔 索并 联 机 器 人 模 糊 控 制 系统 结 构 图
传 感 器 模 块 中 的 接近 传 感 器 是 为 了避 免 末端 执 行 器 与 其 它 部 位 相碰 撞 ,称 重 传 感 器 用 来 测 量 并 限 制 工 件 的 重 量 , 光栅 位 移 传 感 器 用 于 检 测 工 件 当前 在 x、Y、z三 个 方 向上 的实 际运 行位 置 ; 数 据 采 集器 对 传 感 器 信 号 进 行一 系列 调 理 后 传 送 至 本 地 控 制 器 ;本 地 控 制 器 负 责 发 布 监 控 指 令 ,
0 引言
近 年 来 ,柔 索 并 联 机 器 人 应 用 日渐 增 多 ,如
各 国 研 究 人 员 纷 纷 开 展 这 方 面 的研 究 工 作 ,研 制 了 用 于 起 重 、 检 测 、加 工 、港 口货 物 吊 装 、海 底 打 捞 、超 大 口径 射 电望 远 镜 跟踪 射 电源 运 动 等 多
务l
匐 化
基 于Ma a 与L b i t b a ve 柔 索 并 联 机 器 人 l w的 监控系统联合仿真
Co- i ul i oniorng s t sm aton of m t i ys em orcabl ar l f e p al el
m ani pul or based on M at ab an at l d LabV l W E
当今 时 代 ,随 着 计 算 机 网 络 的 迅 速 发 展 及 信
息 技 术 的 日益 完善 ,工 业 机器 人 基 于 Itre 的远 nen t
程 监 控 应 用 的 实 现 成 为 可 能 j ,这 不 仅 突 破 了传
为 下 一步 的轨迹 规划 奠定 了基 础 。
统 监 控 方 式 的 时 空 限 制 和 地 域 障 碍 ,而 且 有 利 于
数 据 的积 累和 更 广 范 围 的资 源共 享 ,可 以 实 施 多
样化 协 同服 务 。
基 于 以上 分 析 ,本 文 以柔 索并 联 机 器 人 为 对 象 , 以 运 动 轨 迹 跟 踪 监 控 为 目标 ,根 据 模 糊 控 制 理 论 的 特 点 ,提 出一 种 针 对 外 界 干 扰 的 自适 应 模 糊 补 偿 控 制 方 案 , 通 过 Ma a /i l k与 t bSmui l n L b E 联 合 仿 真 构 建 了一 个 监 控 网络 平 台 。该 aVI w
第3卷 4 第7 期 2 1— ( ) 【 7 02 7 上 4】 图 1 柔 索 并 联 机 器 人 结 构 示 意 图
所 搭 建 的 柔索 并 联 机 器 人 监 控 系统 的 网络 平 台 总体框 架 如 图 2所 示 。
l
l 似 I 》
图 2 柔 索并 联 机 器 人 监 控 系统 总 体 框 架
种 用 途 柔 索 并 联 机 器 人 样 机 ,因 而 ,柔 索 并 联 机 器 人 的研 究 在 加 工 制 造 业 、装 配 业 、 医 疗 卫 生 、 海 洋 探 测 和航 天 领域 等 方面 具 有一 定理 论 意义 和
实 际工 程 应 用价 值 L J 。柔 索并 联 机 器 人 是 一个 具 。 有 非 线性 、时 变特 性 以 及扰 动 特 点 的机 器人 系统 。 而 对 机 器 人 系统 应 用神 经 网络 控 制 、模 糊 控 制 和 鲁棒 控 制 等算法 进 行过研 究 p 。 J
网络 平 台的 搭 建 不 仅 扩 展 了对 柔 索并 联 机 器 人 的
运 动 轨 迹 跟 踪 监 控 的 异 地远 程 范 围 ,提 高 了监 控 效 率 ,而 且 有 利 于 更 广 层 面 的 多 样 化 协 同服 务 , 为 实现 网络 化的高 精度 测控 体 系奠定 了基 础 。
吴
瑕 ,訾
斌 ,林
俊
W U a. n.Ll J Xi ZIBi N un
( 中国矿业大学 机 电工程学院 ,徐州 2 1 1 ) 2 16
摘
要 : 针对柔 索并联机器人 的结构特 点 ,搭建 了该机器人 监控系统 的总 体框架 。考 虑到柔索并 联机 器人 系统具有非线性 强 、外界 干扰等特 性 ,提 出带有模糊补偿 的自适应控 制算 法 。进 一步 , 通过Ma lb a VE t 与L b lw混合编程 对柔 索并联机器人进行 了运 动轨迹跟踪的联合仿真 、监控界 a 面的设计 及网络发布 。联合仿 真结果表 明 ,柔索并 联机 器人监控 系统具有 良好的轨迹跟踪 性 能 ,且监控人机界面友好 ,仿真效果较为直观 明显 。
1 柔索并联机器人监控 系统设计
柔 索 并 联 机 器 人 结 构 示 意 图 如 图 l 示 。 在 所 图 1 建 立 的 直 角坐 标 系 中 ,三 个 柔 索塔 以 等 边 所 三 角 形 排 布 。在 三 个 伺 服 电机 的协 同驱 动 下 ,三
根 柔 索 的 收 、放 长 度 不 断 改 变 调 整 ,从 而 共 同 驱 动 末 端 执行 器 所载 工 件 来实 现其 空 间位 置 的 运动 。 对 于给 定轨 迹 的工 件 ,任 意 时 刻其 位 置 坐 标 以及 各柔 索长 度均 可通过 正 、逆运 动 学分析 得知 ,故
文献标识码 :A 文章编号 :1 0 -0 3 (0 ) 7 上) 0 7 0 9 1 4 2 1 0 ( 一04 - 4糊控制 ;联合仿真 中图分 类号 :T 4 P2 2
Do :1 . 9  ̄ J is 1 0 -0 4 2 1 7 -) 1 i 3 6l .s n. 9 1 . 0 (I . 5 0 / 0 3 2.