水田平地机的研制
中型水田耕耙平地机辅助机构原理分析与方案设计
中型水田耕耙平地机辅助机构原理分析与方案设计摘要:通过对中型水田耕耙平地机的辅助机构进行调查了解后,可以将中型水田耕耙平地机的辅助机构分为三个组成部分:悬挂架、壳体、后平板。
本章的主要内容是针对中型水田耕耙平地机辅助机构三个部分原理进行分析和设计方案的确定。
在本章中将说明辅助机构具体形式的选择及其选择依据。
一、水田耕耙平地机与拖拉机的连接方式1.1 农业用具与拖拉机的连接方式种类拖拉机田间作业机组的后悬挂系统属于后置式外悬挂系统(以下简称后悬挂)。
其主要的种类有牵引式、悬挂式、半悬挂式等几种类型。
其中悬挂式机组,根本上改变了拖拉机与农机具之间的受力关系[1]。
工作中有可能将机组的重量和载荷,部分地传递到拖拉机驱动轮上,从而增加了驱动轮的垂直载荷,改善了牵引性能,减轻拖拉机本身的结构重量,因此广泛应用于中、小型拖拉机机组上。
农机具在拖拉机上的悬挂方式,按悬挂杆件与拖拉机机体的链接点数,则有单点、两点及三点悬挂三种。
最常用的是双轴式三点悬挂和两点悬挂根据两种[2]。
近年来,随着农用拖拉机后三点悬挂的参数的日趋标准化,在农业生产中农具的悬挂多属于后三点悬挂系统。
1996年4月5号国家技术监督局发布了中华人民共和国国家标准《农业轮式拖拉机后置式三点悬挂―第一部分:1、2、3和4类》,根据动力输出轴的功率划分1、2、3和4类标准,规定了农业轮式拖拉机后置式三点悬挂装置的主要尺寸和参数。
鉴于耕耙机的悬挂架的设计需要40马力拖拉机后三点悬挂的标准参数,下面将对拖拉机后三点悬挂结构作简要说明。
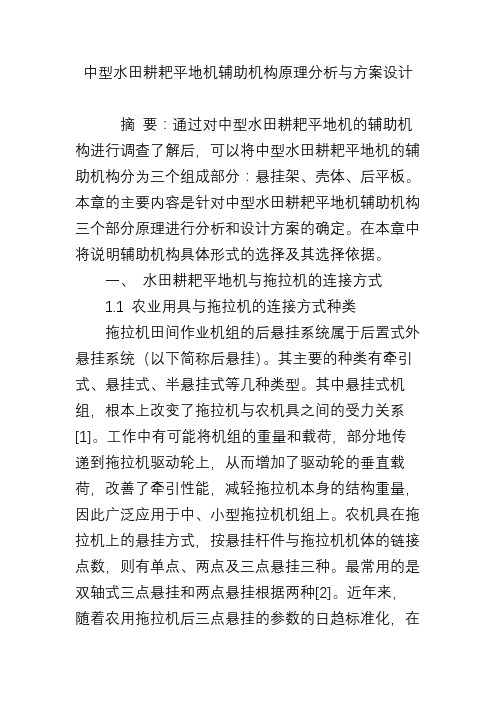
图1.1就是拖拉机后三点悬挂方式的常见布置形式,其中1为上拉杆,3为上悬挂点,5为上铰结点,6为上铰结点连接销,2为下拉杆,4为下悬挂点,6为下铰结点,9为液压臂。
拖拉机通过一个上悬挂点和两个下悬挂点与具有三点悬挂的农机连接。
1.2 中型水田耕耙平地机与拖拉机连接方式的选择与原由中型水田耕耙平地机是适用于40马力以上(包括40马力)中型拖拉机带动的农用耕耙平地机,其承载车身中型拖拉机的悬挂参数与形式和小型拖拉机有很大的不同,中型拖拉机后部设计有标准的后三点悬挂装置。
水田激光平地机工作原理的研究与应用
[ 关键词 ] 水 田激光平地机 ; 平地 铲; 平地作业 [ 中图分类号]¥ 2 2 2 . 5 1 [ 文献标志码 ] A [ 文章编号 ]1 6 7 3 — 3 1 4 2 ( 2 0 1 3 ) 0 9 — 0 0 1 0 — 0 4
Re s e ar c h o n Pr i nc i pl e o f La s e r Le v e l e r f o r Pa ddy Fi e l ds an d I t s Ap pl i c at i o n
2 . G a c - T o y o t a A u t o m o b i l e L t d . C o mp a n y , G u a n g z h o u C i t y , G u a n g d o n g P r o v i n c e 5 1 1 4 5 5 , C h i n a )
L i Q i n g , Z h a o Z u o x i , Wa n g Z a i m a n , K e X i n r o n g , C h e n Z h i h u i , R u a n S h a o me n g ( 1 . S o u t h C h i n a A g r i c u l t u r a l U n i v e r s i t y , G u a n g z h o u C i t y , G u a n g d o n g P r o v i n c e 5 1 0 6 4 2 , C h i n a ;
0 引 言
水 田平 整 是 各 种 灌 溉 技 术 ( 如 浅 水 勤 灌 技 术、 水 稻 浅 湿灌 溉 技 术 、 水 稻控 制 灌 溉技 术 等 ) 和 撒 播 直播 技 术 ( 如 人 工撒 播 、 机器直播 ) 应 用 的 前 提l 】 ] , 是保证水 稻高产 、 稳 产 的重 要 措 施 . 在 水 稻 生 产 中推 广 水 田激 光平 地 技 术 对 于 节 约 农 业
水田激光平地机平地铲姿态测量系统的设计

水田激光平地机平地铲姿态测量系统的设计黎永键1,赵祚喜2(1广东农工商职业技术学院,广州510507;2.华南农业大学工程学院,广州510642)摘要:水田激光平地机水平控制作为农田激光平地技术的重要组成部分,其研究过程中首先要解决平地铲实时倾角测量州题。
为提高倾角测量精度,设计了平地铲姿态测量系统,采用M EM S传感器集成模块A D I Sl6300作为惯性测量单元,通过卡尔曼滤波实现传感器信息融合以计算平地铲倾角。
分析了姿态测量系统的构成.阐述了两种传感器融合测量实时倾角的方法.基于A R M7C ot e x—M3微处理器设计了姿态测量系统硬件。
采用A H R S500G A对该姿态测量系统性能进行了融合算法验证与A D I Sl6300测量平地铲倾角验证。
测试结果表明,该姿态测量系统能在动态条件下准确地测定平地铲实时倾角,可以进一步应用于激光平地机的水平控制之中。
关键词:激光平地机;姿态测量;传感器融合;姿态航向参考系统中图分类号:s222.5+1;S123文献标识码:A文章编号:1003-188X【2012)02_0明日_070引言激光控制平地技术进行农田平整可有效提高农田的平整精度和农田灌溉水的利用率,从而实现精细地面灌溉。
激光平地机在旱地平整中已经得到应用w。
激光平地机的原理是:采用架设于田边的激光发射器发射的旋转激光束形成基准平面.在田间作业的平地机上的激光接受器接受此激光信号,通过控制系统使平地铲保持在与激光束平面平行的某一高度,以达到平地效果”J。
但实践表明,这种单一的高度控制不适合水田使用。
因为水田犁底层高低不平,平地铲在工作过程中难以保持水平,所以不能保证平地效果。
在水田平地作业中,水田激光机不但要保证平地铲高低可调,而且要保证平地铲自动保持水平状态,使平地铲在工作过程中始终与激光束平面平行,所以平地铲水平控制系统对水田作业的激光平地机是十分必要的”『。
平地铲的水平控制实质属于姿态角控制问题,为此首先要解决平地铲实时倾角的测量”’。
1JSL-280型水田打浆平地机的设计

接 影 响 到水 稻 生 产 其他 后 续 环 节 的作 业 。采 用 水 田打浆 平 地 机 作 业 ,一 次进 地就 可完 成耕 、耙 、平全 过程 ,既 缩短整 地 时间 ,又节
省能源 消耗 ,提 高 了作业 效率 ,实现 水稻 生产 高产稳 产 。 关 键词 :水 田耕 整 ;水 田耙 ;作业效 率 ;水稻 生产 ;打浆 平地 ;耕
基 本尺 寸 ( 咖 ):3 0 0 0 X8 4 0 X8 5 0 ;
过程。这种耕作方式工序多,效率低,资源浪费严重。1 J S L 系列水
田打浆 平地机 是在 深入 调 查过我 省水 田地 生产 方式 的大量 特点 的基
础 上研 制开 发 的 ,工 作 部 件 由旋 耕 碎 茬提 浆 和 地表 平 整 两 部分 组
作 模式 水 稻 是 黑龙 江 省 三 大 主要 粮 食 作物 之 一 , 是全 国最 大 的水 稻 商 品粮生 产基 地 。 多年 的实 践表 明,水 稻机 械 化生 产 可增 产 1 5 % 以 上 ,发 展水 稻生产 机械 化在 水稻 生产 中 占有十 分重要 的地 位 ,对保 障 我 国粮食 安全 和增加 我 省农 民收入 具有 重要 作用 。 长 期 以来 ,水 田整 地 一直 延 续着 传 统 的 水 田耕 作 模 式 , 即先 用 畜力 或机 引 的铧 式犁 对 水 田耕翻 ,或运 用旋耕 机旱 旋 ,放水泡 田
时 将根 茬 、茎 杆 、杂 草 旋 压 入泥 浆 中 ,使 地 表 达 到直 播 及插 秧 状
态 。与传 统整 地方 法相 比,降低水 田整地成 本 ,增产 、增 收 ,还 可
机重 ( k g ):3 4 O ; 碎 土率 :大 于8 0 % ; 植 被覆 盖率 :大 于7 0 % ; 作业地 表平 整度 :大 于8 0 % 。 3 传 动机构 的设 计 中 间齿 轮 变 速 箱 一对 齿 轮 的齿 数 分 别 为Z = 1 5 ,Z 2 = 2 3 ;左 端 链 轮 传 动 箱 一 对链 轮 的齿 数 分 别 为z 。 = 1 1 ,z = 1 2 . 传动 比 : i = Z /
水田平地机的研制设计

水田平地机的研制设计吴家安;张成亮;许春林;李明金;崔波;陈长海【摘要】为进一步提高水田平地的效率,设计一种与水田搅浆机配套使用的水田挠性宽幅折叠平地机.介绍该机的总体结构及工作原理,论述调整入土角度机构、挠性粱、平地铲等关键部件的设计思路.机具性能试验结果表明,作业后地面的平整精度能够满足节水灌溉、抑制杂草、机械插秧等农艺要求.【期刊名称】《农业科技与装备》【年(卷),期】2014(000)006【总页数】2页(P44-45)【关键词】水田平地机;平地铲;设计;挠性梁;入土角【作者】吴家安;张成亮;许春林;李明金;崔波;陈长海【作者单位】哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029【正文语种】中文【中图分类】S222水稻生长对水田的平整度要求较高。
平整水田的水平高度相差小,因此漫过地表所需用水大大减少。
由于一般的杂草无法生长在被水覆盖的土壤上,因此经过精细平整后的水田在全部被水掩盖的条件下,可有效抑制杂草的生长。
在水稻生产过程中,水田精细平整技术是节约灌溉用水、抑制杂草生长、提高水稻产量、减少生产成本的重要措施。
传统的耕作方式是先对耕作区进行耕作,再利用水耙轮多次碾压,不仅效率低,而且进地次数多,容易破坏土壤结构。
改进的水田搅浆机虽可一次进地完成全部作业,但存在作业后水田不平整、沉浆厚度不一等问题。
激光平地机成本较高,作业过程不稳定,对外界环境要求高,并且不易与其他水田整地机械联合作业。
根据水稻机插前的平整度要求,研制与一般水田搅浆机配套使用的宽幅折叠式水田平地机。
该机与水田搅浆机联合作业,能够一次完成翻耕、碎土、搅浆、埋茬、平地等多项作业。
1.1 水田平地机的结构宽幅折叠式水田平地机主要由机架主梁、侧梁、前梁、挠性梁、连接梁、液压油缸、拉杆、拉筋、连接板、平地铲配合搅浆机等组成,其总体结构如图1所示。
激光平地机的设计
前言我国是农业大国,要想发展农业规模化和精细化生产就离不开土地平整技术。
用激光控制土地精细平地技术可实现高精度的农田土地平整,是建立现代化精细灌溉农业的基础。
土地精细平整是改善地面灌溉系统性能的重要前提条件之一,是提高地面灌水质量的重要基础措施之一。
田块的平整度越高,越有利于受水受肥均匀,有利于出苗整齐,有利于提高作物产量,有利于农业机械化的实现。
激光平地技术是现有的最先进、最有效的土地精平技术,平地后能够实现 1-2cm 的平整精度。
但是国外激光平地机价格昂贵,而国内激光平地技术仍不完善,这些都不利于激光平地技术在国内的推广。
在当今我国水资源十分缺乏的情况下,更是国民经济保持持续发展的重要手段之一,为此而开发研制与之配套的新型平地设备也迫在眉睫。
因此,提出和设计一种符合中国国情的激光控制平地系统具有重要的现实意义和较高的科学研究价值。
激光控制平地技术是传统常规机械平地技术的进一步发展。
激光平地技术是利用激光作为非视觉控制手段代替平地设备操作人员的目测判断能力,用以控制平地铲的升降高度,达到精确平整土地的目的。
本文对拖挂式激光平地机进行研究,包括牵引机的匹配设计、液压控制系统、拖挂式平地铲的匹配设计和结构设计,并且设计双接受器系统以便更好地解决平地铲过宽造成的倾斜问题,提高激光平地机的平稳度,从而提高激光平地机的平整精度。
关键词:激光平地机;土地平整;液压控制系统;平整精度;结构设计目录1 绪论 (1)1.1土地平整的意义 (1)1.2国内外平整土地及激光平地机现况 (1)1.3主要研究内容 (4)2 激光平地机工作原理 (5)2.1激光平地机工作原理 (5)2.2激光平地机的组成 (6)2.3激光平地机的主要特点 (8)2.4激光平地机的创新点 (9)3 整机匹配设计 (10)3.1主要设计参数 (10)3.2铲刀设计 (10)3.3牵引力的计算 (12)3.4牵引平衡和功率平衡 (12)4 牵引架及三自由度牵引器设计 (18)4.1牵引架的设计 (18)4.2三自由度牵引器的设计 (18)5 液压系统的设计 (20)5.1液压控制系统的设计 (20)5.2 液压控制系统的组成 (20)5.3液压缸的选择 (21)5.4激光平地机总原理图 (23)总结 (25)致谢 (26)参考文献 (27)工程概况本文介绍了激光平地机的结构设计和液压控制系统的设计,首先介绍了激光平地机的原理,激光发射器发射一束极细的,能旋转360°的激光束,形成空间的激光面,为整个施工场地提供了一个恒定的坡度基准口接收器安装在刮土铲上方的桅杆上,从激光束到刮土铲刃之间这段固定距离即为标高测量基准,接收器检测到激光信号后不停的给控制器发送高度差的信号,控制器通过分析处理通过电信号控制三位四通电磁换向阀是左端接通还是右端接通,如果激光扫射在激光接收的上半部,则三位四通电磁阀左端接通,液压泵的液压油将进入双作用液压缸的左腔,右腔回油到油箱,液压杆伸出,平地铲抬高;如果激光扫射在激光接收器的下半部,则三位四通电磁阀右端接通,液压泵的液压油将进入双作用液压缸的右腔,左腔回油到油箱,液压杆收缩,平地铲降低;如果激光平地机停止工作,则三位四通电磁阀左右两端都不通电,左右两腔的液压油同时回油到油箱,如果压力过大,则安全阀打开,降低压力,防止激光平地机受到损伤。
水田激光平地机实用技术

水田激光平地机实用技术陈君梅【摘要】田地平整对发展现代农业具有重要意义。
针对水田精细平整问题,华南农业大学研制了1PJ系列水田激光平地机,不但设有高程控制系统而且设有独立的水平控制系统。
运用该平地机平整水田,田面平整度小于3厘米,满足精细农业的要求。
该文介绍了水田激光平地机的结构和原理,分析了优势和存在的不足,列举了技术改进内容。
生产试验结果表明,该平地机实用技术取得了较好的经济、社会效益,推广应用前景广阔。
【期刊名称】《现代农业装备》【年(卷),期】2013(000)006【总页数】4页(P43-46)【关键词】水田平地机;水田平整;激光;农业机械【作者】陈君梅【作者单位】广东科学技术职业学院,广东广州 510640【正文语种】中文0 引言进行水田土地平整,可以有效改善水田表面状况,提高水田灌溉水的利用率,有利于控制杂草和虫害,提高化肥使用效率,减少环境污染,实现精细地面灌溉[1,2]。
传统的水田平整方法,包括人工平整、畜力平整、拖拉机平整和耕整机平整,都属于仿形平整,完全依靠工作人员经验和目测控制,劳动强度大,平整效率低,耗资大,且难以达到精细平整的要求。
为了解决水田精细平整的问题,华南农业大学研制了1PJ系列水田激光平地机,鉴定结论为“在水田平地技术及机具领域居国际领先水平”。
本文介绍了该水田激光平地机的总体结构和原理,分析了技术优势和存在的不足,通过技术改进后产品性能日趋稳定,提高了工作可靠性和工作效率。
示范推广应用取得了较好的经济效益和社会效益。
1 水田激光平地机总体构造及原理水田激光平地机的总体构造如图1[3]所示。
按功能可分为如下5部分。
1)动力装置。
动力装置可选用水田拖拉机或插秧机机头。
2)平地铲装置。
平地铲包括平地铲体、平地铲侧板、平地铲主拖板及副拖板。
平地铲侧板安装于平地铲体前端两侧,平地铲主拖板铰接于平地铲体后端中央,平地铲主拖板两侧设有副拖板。
平地铲侧板能有效实现平地作业时的储土填土功能,平地铲主拖板和两个副拖板,实现拖平田面和摊平自平地铲侧板溢出泥浆的功能。
中型水田耕耙平地机辅助机构设计
中型水田耕耙平地机辅助机构设计盛力伟【摘要】中型水田耕耙平地机是以29.4 kW拖拉机为动力进行水田耕耙和平地一体的农业机械,是现代农业水田生产不可缺少的农机用具.为此依据其工作性能及特点设计了一套高效且多性能的辅助机构.该辅助机构不仅为耕耙平地机的刀轴系统和传动系统提供安装平台,且为耕耙平地机与拖拉机的连接提供挂接装置.同时围绕整机旋耕、碎土、平地和压茬4项功能进行合理设计,因此该辅助机构性能多样、结构简单.【期刊名称】《农业工程》【年(卷),期】2018(008)008【总页数】4页(P96-99)【关键词】耕耙平地机;旋耕机;辅助机构;悬挂架;农业机械【作者】盛力伟【作者单位】黑龙江省农业机械工程科学研究院,黑龙江哈尔滨150040【正文语种】中文【中图分类】S222.2130 引言耕耙平地机是常用的农业生产工具,现实生产中根据不同的生产要求制造了大、中、小各种型号的耕耙机[1]。
根据南北水、旱田的生产环境发展了各种适用于水、旱田使用的耕耙平地机[2-3]。
中型水田耕耙机多适用于南方水田的农业机械。
现有市场上的中型水田耕耙平地机产品多种多样[4-7]。
但其整体结构大多相似,主要不同之处多是耕耙机的辅助机构。
耕耙机的辅助机构主要包括悬挂架、壳体和后平板。
悬挂架的具体结构设计决定了其与拖拉机的挂接方式;壳体部分具体结构设计决定了其动力传输方式;后平板有无压茬弹齿的设计决定了其是否具有压茬功能[8-9]。
国内外对中型水田耕耙平地机的研究很多,但对中型水田耕耙平地机辅助机构的研究却少有报道[10-13]。
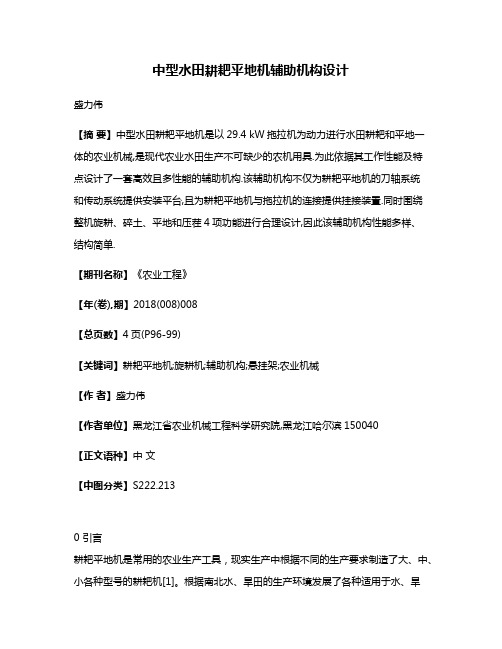
1 概论耕耙平地机的辅助机构主要包括:挂接架和立柱组成的悬挂架;罩板、后罩板、侧板及其附属构件组成的壳体;螺旋压缩弹簧组、托平板和其附属构件组成的后平板。
结构如图1所示。
1.副梁2.左主梁3.悬挂架4.右主梁5.罩焊合6.侧板焊合7.后罩板合8.托平板焊合9.小托平板焊合图1 中型水田耕耙平地机辅助机构Fig.1 Auxiliary mechanism of medium paddy field ploughing and raking grader由于中型水田耕耙平地机是适用于29.4 kW以上(包括29.4 kW)中型拖拉机带动的农用耕耙平地机,其承载车身的中型拖拉机的悬挂参数与形式和小型拖拉机有很大的不同,中型拖拉机后部设计有标准的后三点悬挂装置[14-15]。
水田激光平地机非线性水平控制系统
水田激光平地机非线性水平控制系统陈君梅;赵祚喜;陈嘉琪;俞龙;叶娟【摘要】为使水田激光平地机的平地铲在受到干扰偏离水平位置时能够迅速回复水平,设计了基于角速度-偏差角度的非线性PID控制器的平地铲调平控制系统,使平地铲零角速度渐近回到水平位置,实现零超调,提高了平地机水平控制精度和稳定性.根据平地机的机械液压系统结构搭建了平地铲调平系统动力学模型,推导了传递函数,基于剩余路径确定允许最小角度的非线性控制,设计了水平调平闭环控制系统方案.采用标准姿态航向参考系统AHRS检测平地铲实时倾角与角速度,TMS320F28035芯片作为控制器,设计制作了水平控制系统电路,依据传感器数据通过非线性PID位置控制算法计算出控制量,并通过PWM驱动电路实现平地铲水平控制.在华南农业大学研制的水田激光平地机上,进行了实验室测试与田间试验验证.测试结果表明,水平控制系统响应迅速,实现了平地铲渐进逼近水平位置的控制效果,超调小,稳态误差趋于零,平地铲基本控制在水平位置±1.以内,平地铲工作稳定.【期刊名称】《农业机械学报》【年(卷),期】2014(045)007【总页数】6页(P79-84)【关键词】水田激光平地机;水平控制;非线性PID位置控制【作者】陈君梅;赵祚喜;陈嘉琪;俞龙;叶娟【作者单位】广东科学技术职业学院,广州510640;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;广东科学技术职业学院,广州510640【正文语种】中文【中图分类】F323.3;S222.5引言农田表面平整状况对灌溉质量和效率有着重要影响,世界范围内的大量研究表明,土地被平整后可提高作物产量20%~30%,可节水30%~50%,水田土地利用率提高7%,并可减少农药、化肥和除草剂的使用量[1-5]。
【CN210075970U】水田秸秆打捞收集平地机【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920524553.5(22)申请日 2019.04.18(73)专利权人 佳木斯市新昌液压件制造有限公司地址 154005 黑龙江省佳木斯市高新区农机产业园中华路6号(72)发明人 修德龙 翟书良 吕刚 张晋民 (51)Int.Cl.A01B 49/02(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称水田秸秆打捞收集平地机(57)摘要水田秸秆打捞收集平地机属于农业机械;在立体框式机架总成上依次安装梳齿耙、弹齿捡拾辊总成、弧形筛板和倒置∏型框架,所述的倒置∏型框架前侧与立体框式机架总成铰连接,在倒置∏型框架的两个相对立向侧架上分别安装侧筛板或侧壁板,在倒置∏型框架的底架上安装底筛板,后筛板或后壁板安装在立体框式机架总成的后侧部上,双向液压油缸的两端分别与立体框式机架总成和倒置∏型框架铰连接,倒置∏型框架后端部与后筛板或后壁板之间相互配合;本机结构合理、简单、新颖,秸秆打捞收集及平地作业质量好,作业效率高,使用可靠,为水田秸秆机械化打捞作业提供了技术支持。
权利要求书1页 说明书2页 附图2页CN 210075970 U 2020.02.18C N 210075970U权 利 要 求 书1/1页CN 210075970 U1.一种水田秸秆打捞收集平地机,包括立体框式机架总成(1),在所述立体框式机架总成(1)前侧部上分别配装悬挂架(12)、主传动箱(13)和副传动箱(11),传动轴(14)将主传动箱(13)与副传动箱(11)连接,其特征在于:在所述立体框式机架总成(1)的前侧下部上安装梳齿耙(9),在所述立体框式机架总成(1)上、位于梳齿耙(9)的后侧上方部位处可转动的安装弹齿捡拾辊总成(10),所述弹齿捡拾辊总成(10)与副传动箱(11)连接,在所述立体框式机架总成(1)上、位于梳齿耙(9)的后方和弹齿捡拾辊总成(10)的侧下方部位处相互配合的配装弧形筛板(8),在所述立体框式机架总成(1)的后侧中间部位处配装倒置П型框架(2),所述倒置П型框架(2)前侧下部与立体框式机架总成(1)铰连接,倒置П型框架(2)内侧部与弹齿捡拾辊总成(10)连通配合,在所述倒置П型框架(2)的两个相对立向侧架上分别安装侧筛板或侧壁板(3),在所述倒置П型框架(2)的底架上安装底筛板(7),在所述立体框式机架总成(1)的后侧部上安装后筛板或后壁板(5),双向液压油缸(4)的两端分别与立体框式机架总成(1)和倒置П型框架(2)铰连接,双向液压油缸(4)伸长或缩短运动驱动带有侧筛板或侧壁板(3)和底筛板(7)的倒置П型框架(2)绕与立体框式机架总成(1)铰连点做上下弧线摆动,所述倒置П型框架(2)的后端部与后筛板或后壁板(5)之间呈相互接触的关闭配合或相互脱离的开启配合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水田平地机的研制
吴家安张成亮许春林李明金崔波陈长海
(哈尔滨市农业科学院哈尔滨150029)
为了进一步提高水田平地的效率,设计了一种与水田搅浆机配套使用的水田挠性宽幅折叠平地机。
该机可配置安装在目前大多数品牌搅浆机上进行搅浆平地作业,与搅浆机挠性连接,可自动实现水平,特有的单片式刮板可有效防止土壤拥堵,并对搅浆后的大土块进行挤压,利于碎土。
工作过后平整精度能够达到节水灌溉,抑制杂草的目的,并满足机械插秧等农艺要求。
本文阐述了其工作原理,研究了机构,分析了运动特性,对其做了简单的介绍。
0 引言
水稻由于其特殊的生长要求, 对水田的平整要求很高。
平整的水田由于水平高度相差无几,所以同时漫过地表所需用水会大大减少,同时由于一般杂草不能能生长在被水覆盖的土壤。
所以经过精细平整后的水田由于能全部被水掩盖, 可有效抑制杂草的生长。
所以水田精细平整技术是在水稻生产过程中节约灌溉用水、抑制杂草生长, 进而提高水稻产量、减少生产成本的重要措施。
传统的耕作方式,对耕作区先进行耕作,再利用水耙轮多次碾压,多次进地,这样不仅效率很低,而且由于进地次数多,容易破坏土壤结构;后改进的水田搅浆机虽可以一次进地,可是却存在作业后水田不平整,沉浆厚度不一等问题,最近研制的激光平地机成本较高,作业过程不稳定,对外界环境要求高,并且不易与其他水田整地机械联合作业。
本文按照水稻机插前的平整度要求,研制了一种与一般水田搅浆机配套使用的宽
幅折叠式水田平地机。
该机与水田搅浆机联合作业,能够一次完成翻耕、碎土、搅浆、埋茬和平地等多项作业。
1水田平地机的结构和工作原理
1.1 水田平地机的结构
宽幅折叠式水田平地机主要由机架主梁、侧梁、前梁、挠性梁、连接梁、液压油缸、拉杆、拉筋、连接板、平地铲配合搅浆机等组成并使用。
总体结构如图1所示:平地铲(1)焊接在机架(2、10)上,并随液压油缸(7)的伸缩而升降;两侧机架在升起过程中,在液压油缸(7)、拉杆(3)和重力的作用下绕着销轴转动,当到达上限位时,侧梁(2)上的拉筋扣会在弹簧的作用下将其自动锁住。
平地机通过连接板(6)固定于水田搅浆(11)机梁上,搅浆机通过
1.平地铲
2.侧梁
3.拉杆
4.挠性梁
5.连接梁
6.连接板
7.液压油缸
8.拉筋
9.前梁10.机架主梁11.搅浆机
图1水田平地机总体结构简图
标准的三点悬挂与拖拉机连接。
工作时,拖拉机悬挂水田平地搅浆机前进,拖拉机通过
动力输出轴带动水田搅浆机完成碎土、搅浆、埋茬作业,平地铲将泥浆拖压平整,并通过重力以及平衡作用将微小的地面坡度抹平。
最终联合完成碎土、搅浆、埋茬及平地作业。
1.2 水田平地机的工作原理
该机工作时如图1所示:首先通过连接板(6)与搅浆机连接并通过转动连接板调整初始的角度和位置,然后将两边的侧梁通过扳动拉筋的方式放下。
都调整好以后通过液压控制平地机的初始与工作位置。
同时因为后面平底主梁与搅浆机连接梁之间设计成挠性机构,所以平地机始终是浮动的,不随搅浆机的倾斜而倾斜,并且在一定幅度内不随搅浆机的起伏而起伏,始终保持水平状态。
将平地机角度调整合适以后,焊接在主梁侧梁上的特殊形状的单片式平地铲间隔排开,像是一把“梳子”将田面梳理平整,并对大土块进行挤压,使其细碎,从而达到平地,整地的作用。
2 关键部件设计
2.1 调整入土角度的机构设计
图2调整入土角度以的机构简图
首先如图所示当油缸长度为785mm 时机具位于上限位,为运输状态,当油缸伸长到1090mm 时机具的连接梁与连接板的下限位碰撞,然后如果在伸长油缸直至1190mm 时油缸出于工作状态,由此可以得出平地铲的工作偏角可以调整的范围在28°。
其次由本简图可以看出平地机与搅浆
机连接为四杆机构,所以属于浮动的,这样保证了,在搅浆机浮动的时候,平地机自身并不随之上下沉浮。
2.2 挠性梁设计
图3 挠性梁的设计
如图3所示:下梁中的主梁连接装置与主梁销连接保留一个转动的自由度,供调整入土角度用,上梁与连接梁刚性连接,上梁与下梁之间通过一根销轴和两个弹簧连接。
这样在连接梁倾斜的时候,焊接有平地铲的主梁靠自身重力的因素便不随之倾斜了。
2.3 平地铲的设计
图4 平地铲的设计
如图4所示研制单片式平地铲结构,确定结构尺寸,研制平地部件结构形式,双层平地结构布置方法可有效防止土壤拥堵,并对搅浆后的大土块进行挤压,利于碎土。
3 试验情况,
2013年4月在哈尔滨市农业科学院水田示范区进行田间性能试验。
试验区面积为2亩,土壤类型为黏质黑土,田内保留保留稻茬,并测定试验区内植被密度为0.49kg/m 2,土壤平均坚实度为246Kpa ,试验前对试验田进行灌水浸泡处理。
泡田后第2天进行搅浆平地试验。
通过实验,所得到
的性能指标为泥浆度 1.07g/cm 3
,平整度3.7cm 。
完全符合插秧要求。