水田平地机设计毕业设计论文
中型水田耕耙平地机辅助机构原理分析与方案设计
中型水田耕耙平地机辅助机构原理分析与方案设计摘要:通过对中型水田耕耙平地机的辅助机构进行调查了解后,可以将中型水田耕耙平地机的辅助机构分为三个组成部分:悬挂架、壳体、后平板。
本章的主要内容是针对中型水田耕耙平地机辅助机构三个部分原理进行分析和设计方案的确定。
在本章中将说明辅助机构具体形式的选择及其选择依据。
一、水田耕耙平地机与拖拉机的连接方式1.1 农业用具与拖拉机的连接方式种类拖拉机田间作业机组的后悬挂系统属于后置式外悬挂系统(以下简称后悬挂)。
其主要的种类有牵引式、悬挂式、半悬挂式等几种类型。
其中悬挂式机组,根本上改变了拖拉机与农机具之间的受力关系[1]。
工作中有可能将机组的重量和载荷,部分地传递到拖拉机驱动轮上,从而增加了驱动轮的垂直载荷,改善了牵引性能,减轻拖拉机本身的结构重量,因此广泛应用于中、小型拖拉机机组上。
农机具在拖拉机上的悬挂方式,按悬挂杆件与拖拉机机体的链接点数,则有单点、两点及三点悬挂三种。
最常用的是双轴式三点悬挂和两点悬挂根据两种[2]。
近年来,随着农用拖拉机后三点悬挂的参数的日趋标准化,在农业生产中农具的悬挂多属于后三点悬挂系统。
1996年4月5号国家技术监督局发布了中华人民共和国国家标准《农业轮式拖拉机后置式三点悬挂―第一部分:1、2、3和4类》,根据动力输出轴的功率划分1、2、3和4类标准,规定了农业轮式拖拉机后置式三点悬挂装置的主要尺寸和参数。
鉴于耕耙机的悬挂架的设计需要40马力拖拉机后三点悬挂的标准参数,下面将对拖拉机后三点悬挂结构作简要说明。
图1.1就是拖拉机后三点悬挂方式的常见布置形式,其中1为上拉杆,3为上悬挂点,5为上铰结点,6为上铰结点连接销,2为下拉杆,4为下悬挂点,6为下铰结点,9为液压臂。
拖拉机通过一个上悬挂点和两个下悬挂点与具有三点悬挂的农机连接。
1.2 中型水田耕耙平地机与拖拉机连接方式的选择与原由中型水田耕耙平地机是适用于40马力以上(包括40马力)中型拖拉机带动的农用耕耙平地机,其承载车身中型拖拉机的悬挂参数与形式和小型拖拉机有很大的不同,中型拖拉机后部设计有标准的后三点悬挂装置。
水田激光平地机工作原理的研究与应用
[ 关键词 ] 水 田激光平地机 ; 平地 铲; 平地作业 [ 中图分类号]¥ 2 2 2 . 5 1 [ 文献标志码 ] A [ 文章编号 ]1 6 7 3 — 3 1 4 2 ( 2 0 1 3 ) 0 9 — 0 0 1 0 — 0 4
Re s e ar c h o n Pr i nc i pl e o f La s e r Le v e l e r f o r Pa ddy Fi e l ds an d I t s Ap pl i c at i o n
2 . G a c - T o y o t a A u t o m o b i l e L t d . C o mp a n y , G u a n g z h o u C i t y , G u a n g d o n g P r o v i n c e 5 1 1 4 5 5 , C h i n a )
L i Q i n g , Z h a o Z u o x i , Wa n g Z a i m a n , K e X i n r o n g , C h e n Z h i h u i , R u a n S h a o me n g ( 1 . S o u t h C h i n a A g r i c u l t u r a l U n i v e r s i t y , G u a n g z h o u C i t y , G u a n g d o n g P r o v i n c e 5 1 0 6 4 2 , C h i n a ;
0 引 言
水 田平 整 是 各 种 灌 溉 技 术 ( 如 浅 水 勤 灌 技 术、 水 稻 浅 湿灌 溉 技 术 、 水 稻控 制 灌 溉技 术 等 ) 和 撒 播 直播 技 术 ( 如 人 工撒 播 、 机器直播 ) 应 用 的 前 提l 】 ] , 是保证水 稻高产 、 稳 产 的重 要 措 施 . 在 水 稻 生 产 中推 广 水 田激 光平 地 技 术 对 于 节 约 农 业
水田激光平地机平地铲姿态测量系统的设计

水田激光平地机平地铲姿态测量系统的设计黎永键1,赵祚喜2(1广东农工商职业技术学院,广州510507;2.华南农业大学工程学院,广州510642)摘要:水田激光平地机水平控制作为农田激光平地技术的重要组成部分,其研究过程中首先要解决平地铲实时倾角测量州题。
为提高倾角测量精度,设计了平地铲姿态测量系统,采用M EM S传感器集成模块A D I Sl6300作为惯性测量单元,通过卡尔曼滤波实现传感器信息融合以计算平地铲倾角。
分析了姿态测量系统的构成.阐述了两种传感器融合测量实时倾角的方法.基于A R M7C ot e x—M3微处理器设计了姿态测量系统硬件。
采用A H R S500G A对该姿态测量系统性能进行了融合算法验证与A D I Sl6300测量平地铲倾角验证。
测试结果表明,该姿态测量系统能在动态条件下准确地测定平地铲实时倾角,可以进一步应用于激光平地机的水平控制之中。
关键词:激光平地机;姿态测量;传感器融合;姿态航向参考系统中图分类号:s222.5+1;S123文献标识码:A文章编号:1003-188X【2012)02_0明日_070引言激光控制平地技术进行农田平整可有效提高农田的平整精度和农田灌溉水的利用率,从而实现精细地面灌溉。
激光平地机在旱地平整中已经得到应用w。
激光平地机的原理是:采用架设于田边的激光发射器发射的旋转激光束形成基准平面.在田间作业的平地机上的激光接受器接受此激光信号,通过控制系统使平地铲保持在与激光束平面平行的某一高度,以达到平地效果”J。
但实践表明,这种单一的高度控制不适合水田使用。
因为水田犁底层高低不平,平地铲在工作过程中难以保持水平,所以不能保证平地效果。
在水田平地作业中,水田激光机不但要保证平地铲高低可调,而且要保证平地铲自动保持水平状态,使平地铲在工作过程中始终与激光束平面平行,所以平地铲水平控制系统对水田作业的激光平地机是十分必要的”『。
平地铲的水平控制实质属于姿态角控制问题,为此首先要解决平地铲实时倾角的测量”’。
1JSL-280型水田打浆平地机的设计

接 影 响 到水 稻 生 产 其他 后 续 环 节 的作 业 。采 用 水 田打浆 平 地 机 作 业 ,一 次进 地就 可完 成耕 、耙 、平全 过程 ,既 缩短整 地 时间 ,又节
省能源 消耗 ,提 高 了作业 效率 ,实现 水稻 生产 高产稳 产 。 关 键词 :水 田耕 整 ;水 田耙 ;作业效 率 ;水稻 生产 ;打浆 平地 ;耕
基 本尺 寸 ( 咖 ):3 0 0 0 X8 4 0 X8 5 0 ;
过程。这种耕作方式工序多,效率低,资源浪费严重。1 J S L 系列水
田打浆 平地机 是在 深入 调 查过我 省水 田地 生产 方式 的大量 特点 的基
础 上研 制开 发 的 ,工 作 部 件 由旋 耕 碎 茬提 浆 和 地表 平 整 两 部分 组
作 模式 水 稻 是 黑龙 江 省 三 大 主要 粮 食 作物 之 一 , 是全 国最 大 的水 稻 商 品粮生 产基 地 。 多年 的实 践表 明,水 稻机 械 化生 产 可增 产 1 5 % 以 上 ,发 展水 稻生产 机械 化在 水稻 生产 中 占有十 分重要 的地 位 ,对保 障 我 国粮食 安全 和增加 我 省农 民收入 具有 重要 作用 。 长 期 以来 ,水 田整 地 一直 延 续着 传 统 的 水 田耕 作 模 式 , 即先 用 畜力 或机 引 的铧 式犁 对 水 田耕翻 ,或运 用旋耕 机旱 旋 ,放水泡 田
时 将根 茬 、茎 杆 、杂 草 旋 压 入泥 浆 中 ,使 地 表 达 到直 播 及插 秧 状
态 。与传 统整 地方 法相 比,降低水 田整地成 本 ,增产 、增 收 ,还 可
机重 ( k g ):3 4 O ; 碎 土率 :大 于8 0 % ; 植 被覆 盖率 :大 于7 0 % ; 作业地 表平 整度 :大 于8 0 % 。 3 传 动机构 的设 计 中 间齿 轮 变 速 箱 一对 齿 轮 的齿 数 分 别 为Z = 1 5 ,Z 2 = 2 3 ;左 端 链 轮 传 动 箱 一 对链 轮 的齿 数 分 别 为z 。 = 1 1 ,z = 1 2 . 传动 比 : i = Z /
毕业设计--水田秸秆掩埋旋耕机设计

图书分类号:密级:毕业设计(论文)水田秸秆掩埋旋耕机设计The Design of Paddy-straw-buried RotaryTillage学生姓名班级学院名称专业名称指导教师XXX学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果按照本人承担。
论文作者签名:日期:年月日XXX学位论文版权协议书本人完全了解XXX关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归XXX所拥有。
XXX有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
XXX可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要旋耕机在我国农业之中发挥着重要的作用。
在中国的南方水田地区,旋耕机基本满足每年三个季节的耕作要求;在我国的北方地区,旋耕机一般用于犁耕后的直接旋耕播种或者耙地。
旋耕机还可以用于灭茬作业,可以把收获后的玉米秸秆打碎还田。
但是多数旋耕只能进行一种作业功能。
本篇毕业设计中我们设计了一种集水田秸秆掩埋、碎土及秸秆覆盖作业于一体多功能旋耕机。
[1]本此设计提供了一种水田秸秆掩埋旋耕机,该机可以通过更换水田埋草刀后进行稻麦水田秸秆掩埋、碎土和秸秆覆盖等作业,实现一机多用,提高机具的工作效率。
本次毕业设计的主要内容为:1、相关资料的调查与收集,国内外各种旋耕机械现状与发展趋势,结合实际情况提出相关的结构方案。
2、总体方案设计,绘制水田秸秆掩埋旋耕机的工作图纸、现场的施工图。
水田平地机的研制设计

水田平地机的研制设计吴家安;张成亮;许春林;李明金;崔波;陈长海【摘要】为进一步提高水田平地的效率,设计一种与水田搅浆机配套使用的水田挠性宽幅折叠平地机.介绍该机的总体结构及工作原理,论述调整入土角度机构、挠性粱、平地铲等关键部件的设计思路.机具性能试验结果表明,作业后地面的平整精度能够满足节水灌溉、抑制杂草、机械插秧等农艺要求.【期刊名称】《农业科技与装备》【年(卷),期】2014(000)006【总页数】2页(P44-45)【关键词】水田平地机;平地铲;设计;挠性梁;入土角【作者】吴家安;张成亮;许春林;李明金;崔波;陈长海【作者单位】哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029;哈尔滨市农业科学院,哈尔滨150029【正文语种】中文【中图分类】S222水稻生长对水田的平整度要求较高。
平整水田的水平高度相差小,因此漫过地表所需用水大大减少。
由于一般的杂草无法生长在被水覆盖的土壤上,因此经过精细平整后的水田在全部被水掩盖的条件下,可有效抑制杂草的生长。
在水稻生产过程中,水田精细平整技术是节约灌溉用水、抑制杂草生长、提高水稻产量、减少生产成本的重要措施。
传统的耕作方式是先对耕作区进行耕作,再利用水耙轮多次碾压,不仅效率低,而且进地次数多,容易破坏土壤结构。
改进的水田搅浆机虽可一次进地完成全部作业,但存在作业后水田不平整、沉浆厚度不一等问题。
激光平地机成本较高,作业过程不稳定,对外界环境要求高,并且不易与其他水田整地机械联合作业。
根据水稻机插前的平整度要求,研制与一般水田搅浆机配套使用的宽幅折叠式水田平地机。
该机与水田搅浆机联合作业,能够一次完成翻耕、碎土、搅浆、埋茬、平地等多项作业。
1.1 水田平地机的结构宽幅折叠式水田平地机主要由机架主梁、侧梁、前梁、挠性梁、连接梁、液压油缸、拉杆、拉筋、连接板、平地铲配合搅浆机等组成,其总体结构如图1所示。
小型水田耕耙平地机关键部件设计与建模

使 用 的一种新 型 的农 用耕 耙 旋耕 整 地 机 械 。本 文 主 要设 计小 型水 田耕 耙平 地 机 的传 动 系统 。 由手扶拖 拉 机右侧 的动力 输 出轴 通过 中间 传 动 装 置带 动耕 耙 刀 辊 快 速 旋 转 , 水 田原 茬 泡 田地 及 对
翻、 旋后 泡 田地 进 行 旋 切 、 打 和搅 拌 , 成 碎 土耙 击 完 浆 作业 ; 由后罩 板 挡住 刀辊 旋起 的泥 浆 和 根茬 , 对 并
1 3 链 条 节距 P的选 定 .
田面进行 刮摊 。此 后 , 平 板再 将 泥 浆 拖 压平 整 , 拖 并 通 过整 齐排 列 的 弹 齿将 根 茬 压 人 泥 浆 中 , 终 完 成 最 碎土、 打浆 、 茬及 平地 的作 业 。在 确 定 了传 动方 式 压 后就 要 开始传 动 系 统 的结 构 设 计 , 由于 选 用 的是 链 传动 , 以先 确 定 传 动 比 , 定 链 轮 后 开 始 轴 、 体 所 确 箱
等 的设计 , 后 就 逐 步 的细 化 各 部 分 的结 构 。在 设 然 计好 具体 尺 寸后 对 关 键 的部 分 进 行 校 核 分 析 , 以进 步 确定设 计 的合理 性 。
一
利用 功率 曲线 图结 合 具 体 工 作 情 况 加 以修 正 , 修正 后 的计 算 功率 P 为 : : ! , 中 :一 传 递 p 式 P
P=1 0 m。 9. 5 m
公 司助理 工程 师 , 主要 从 事钻 井机 械 方面 的研 究
的功 率 ; 工 作 情况 系数 ; 排 数 系数 ; 小 K一 K一 K一 链 轮 齿数 系数 。由上 面选定 的齿 数再 结 合 所 选 的各
参 数得 出的设计 功 率 :
激光平地机的设计
前言我国是农业大国,要想发展农业规模化和精细化生产就离不开土地平整技术。
用激光控制土地精细平地技术可实现高精度的农田土地平整,是建立现代化精细灌溉农业的基础。
土地精细平整是改善地面灌溉系统性能的重要前提条件之一,是提高地面灌水质量的重要基础措施之一。
田块的平整度越高,越有利于受水受肥均匀,有利于出苗整齐,有利于提高作物产量,有利于农业机械化的实现。
激光平地技术是现有的最先进、最有效的土地精平技术,平地后能够实现 1-2cm 的平整精度。
但是国外激光平地机价格昂贵,而国内激光平地技术仍不完善,这些都不利于激光平地技术在国内的推广。
在当今我国水资源十分缺乏的情况下,更是国民经济保持持续发展的重要手段之一,为此而开发研制与之配套的新型平地设备也迫在眉睫。
因此,提出和设计一种符合中国国情的激光控制平地系统具有重要的现实意义和较高的科学研究价值。
激光控制平地技术是传统常规机械平地技术的进一步发展。
激光平地技术是利用激光作为非视觉控制手段代替平地设备操作人员的目测判断能力,用以控制平地铲的升降高度,达到精确平整土地的目的。
本文对拖挂式激光平地机进行研究,包括牵引机的匹配设计、液压控制系统、拖挂式平地铲的匹配设计和结构设计,并且设计双接受器系统以便更好地解决平地铲过宽造成的倾斜问题,提高激光平地机的平稳度,从而提高激光平地机的平整精度。
关键词:激光平地机;土地平整;液压控制系统;平整精度;结构设计目录1 绪论 (1)1.1土地平整的意义 (1)1.2国内外平整土地及激光平地机现况 (1)1.3主要研究内容 (4)2 激光平地机工作原理 (5)2.1激光平地机工作原理 (5)2.2激光平地机的组成 (6)2.3激光平地机的主要特点 (8)2.4激光平地机的创新点 (9)3 整机匹配设计 (10)3.1主要设计参数 (10)3.2铲刀设计 (10)3.3牵引力的计算 (12)3.4牵引平衡和功率平衡 (12)4 牵引架及三自由度牵引器设计 (18)4.1牵引架的设计 (18)4.2三自由度牵引器的设计 (18)5 液压系统的设计 (20)5.1液压控制系统的设计 (20)5.2 液压控制系统的组成 (20)5.3液压缸的选择 (21)5.4激光平地机总原理图 (23)总结 (25)致谢 (26)参考文献 (27)工程概况本文介绍了激光平地机的结构设计和液压控制系统的设计,首先介绍了激光平地机的原理,激光发射器发射一束极细的,能旋转360°的激光束,形成空间的激光面,为整个施工场地提供了一个恒定的坡度基准口接收器安装在刮土铲上方的桅杆上,从激光束到刮土铲刃之间这段固定距离即为标高测量基准,接收器检测到激光信号后不停的给控制器发送高度差的信号,控制器通过分析处理通过电信号控制三位四通电磁换向阀是左端接通还是右端接通,如果激光扫射在激光接收的上半部,则三位四通电磁阀左端接通,液压泵的液压油将进入双作用液压缸的左腔,右腔回油到油箱,液压杆伸出,平地铲抬高;如果激光扫射在激光接收器的下半部,则三位四通电磁阀右端接通,液压泵的液压油将进入双作用液压缸的右腔,左腔回油到油箱,液压杆收缩,平地铲降低;如果激光平地机停止工作,则三位四通电磁阀左右两端都不通电,左右两腔的液压油同时回油到油箱,如果压力过大,则安全阀打开,降低压力,防止激光平地机受到损伤。
水田激光平地机平地铲姿态调整机构优化设计
水田激光平地机平地铲姿态调整机构优化设计孙启新;陈书法;杨进;芦新春【摘要】激光平地机在农业生产中的应用越来越广,提高平地铲姿态调整系统的响应速度,是保证激光平地机作业精度的关键因素之一.针对水田平地机的特点,运用ADAMS对平地铲姿态调整机构进行优化设计.以主要构件长度尺寸为设计变量,以平地铲竖直方向运动速度最大为优化目标,借助ADAMS进行参数化建模,并构建约束条件和目标函数.通过仿真优化,获得平地铲速度与设计变量的最优值.试验验证,仿真优化结果可行,经过优化设计平地铲完成上升和下降全程的响应时间分别为0.75 s和0.6 s,上升阶段响应速度提高了400%,下降阶段提高了150%.【期刊名称】《农业装备与车辆工程》【年(卷),期】2015(053)010【总页数】4页(P13-16)【关键词】激光平地机;姿态调整;优化设计;ADAMS【作者】孙启新;陈书法;杨进;芦新春【作者单位】222005江苏省连云港市淮海工学院机械工程学院;222005江苏省连云港市淮海工学院机械工程学院;222005江苏省连云港市淮海工学院机械工程学院;222005江苏省连云港市淮海工学院机械工程学院【正文语种】中文【中图分类】S222.5+10 引言随着现代农业生产方式的转变,农业机械装备正向自动化、智能化方向发展。
近年来,激光平地机在农田耕整中的应用越来越广,在这方面的研究取得了很多成果。
刘刚等[1]设计了激光平地机控制测量系统,并进行了大田试验。
李庆等[2]针对水田的特点采用倾角传感器来控制平地铲的水平姿态。
黎永键等[3]设计了水田激光平地机平地铲姿态专用测量系统,实现闭环控制。
林潮兴等[4]对水田激光平地机的高程系统动态特性进行了实验研究。
侯明亮[5]采用负载传感变量泵和速度调节阀来调整液压系统的效率和功率匹配。
激光平地机以激光发射器产生的激光平面作为基准面,激光接受器固定在平地铲上,用来探测平地铲相对激光平面的位置偏差,然后将此位置偏差传给控制系统,控制系统经运算控制液压系统驱动平地铲完成位置和姿态的调整。
1GDP-180型水田打浆平地机的研究
摘 要 : 5种 选 育 的酶 活性 较 高的 益 生 茵 菌株 为 受 试 菌 种 , 据 菌 株 的 特 性 , 4因 素 3水 平 组 合 方 案 , 究 以 依 按 研 菌株 组合 发 酵 玉 米 秸 秆 和 稻 草 最佳 的 菌 种 添 加 量 、 温度 及 时 闻 。
将拖 拉机 动力输 出轴传 到收 获 机 的 动力 分 成 2路 , 这 2 都是 采用 万 向轴 传 动 的 , 中一 路 去传 动 收 路 其
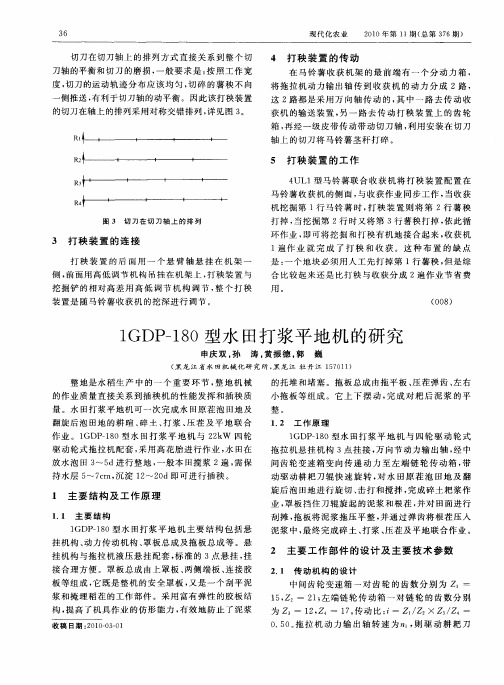
度, 切刀 的运动 轨迹 分 布应该 均 匀 , 碎 的薯 秧不 向 切
一
侧推送 , 有利 于切 刀轴的动平衡 。因此该 打秧装 置
的切刀在轴上 的排列采用对称 交错排 列 , 详见 图 3 。
1遍作 业 就 完 成 了 打秧 和 收 获 。 这 种 布 置 的 缺 点 是 : 个地块 必 须用人 工先 打掉第 1 薯秧 , 一 行 但是 综 合 比较 起来 还是 比打秧 与 收获分 成 2 作 业节 省费 遍
用。
( 8) 00
3 打 秧 装 置 的 连接
打秧 装 置 的后 面用 一 个 悬 臂 轴 悬 挂 在 机 架 一
05 。 . 0 拖拉 机 动力 输 出轴 转 速 为 , 驱 动 耕耙 刀 则
现 代 化 农 业
21 0 0年 第 1 1期 ( 第 3 6期 ) 总 7
3 7
益 生 菌 发 酵 秸 秆 的发 酵条 件研 究
麻 名汉 , 文平 ,] 霞 甘 /彩 - -
( 龙 江 省 农 垦科 学 院 畜牧 兽 医研 究 所 , 尔滨 1 0 3 ) 黑 哈 5 0 8
浆和掩 埋稻 茬 的工作部 件 。采用 富有 弹性 的胶板结
构 , 高 了机 具作 业 的仿 形 能力 , 效地 防止 了泥 浆 提 有
适用于水田的激光平地机具液压系统设计

适用于水田的激光平地机具液压系统设计
李庆;王在满;周志艳;杨均忠;许耀军
【期刊名称】《农机化研究》
【年(卷),期】2007(000)010
【摘要】设计了一种水田激光平地机具液压系统.该液压系统主要由液压油泵、电磁换向阀、液压缸、蓄压器和散热器等元件组成.液压泵由拖拉机的动力输出轴驱动;电磁换向阀采用拖拉机电源直流12V供电,可实现平地机具两端分别独立升降;蓄压器起到缓冲作用可改善系统油压的稳定性;散热器可保证液压油温不超过70℃;背压阀用来调节平地机具的下降速度.实际应用表明,水田激光平地机构液压系统能与控制系统相匹配,工作正常.
【总页数】3页(P90-91,94)
【作者】李庆;王在满;周志艳;杨均忠;许耀军
【作者单位】华南农业大学,工程学院,广州,510642;华南农业大学,工程学院,广州,510642;华南农业大学,工程学院,广州,510642;华南农业大学,工程学院,广
州,510642;华南农业大学,工程学院,广州,510642
【正文语种】中文
【中图分类】S233.3
【相关文献】
1.一种水田激光平地机平地铲水平控制系统设计研究 [J], 黎永键;赵祚喜;高俊文
2.水田激光平地机平地铲姿态测量系统的设计 [J], 黎永键;赵祚喜
3.水田激光平地机激光接收放大电路的优化设计 [J], 可欣荣;罗锡文
4.水田激光平地机平地铲姿态调整机构优化设计 [J], 孙启新;陈书法;杨进;芦新春
5.两种水稻种植新机具——水稻播插前深施肥机与水田振动起浆平地机 [J], 刘卫东
因版权原因,仅展示原文概要,查看原文内容请购买。
基于GNSS的水田旋耕平地机系统设计
基于GNSS的水田旋耕平地机系统设计
李会荣
【期刊名称】《南方农机》
【年(卷),期】2024(55)1
【摘要】【目的】提升水田旋耕平地机的应用效能。
【方法】基于全球导航卫星系统(GNSS)技术,设计了一种水田旋耕平地机系统。
该系统通过GNSS接收器接收卫星信号,可以实时、精准获取水田旋耕平地机的具体位置信息,并通过自动控制系统实现对水田旋耕平地机的精确导航和操作。
系统设计过程采用了控制器等关键组件,配有调节液压油缸。
为验证系统的有效性,对水田旋耕平地机进行了试验。
【结果】试验结果表明,该系统能够针对水田旋耕平地机运行的实际情况,有针对性地伸缩,实现旋耕平地转动,保证拖拉机处于水平状态,提高水田平整效果。
【结论】该系统的平整效果良好,能够有效地提高水田旋耕平地的效率和质量。
【总页数】3页(P66-68)
【作者】李会荣
【作者单位】黑龙江省农业机械工程科学研究院牡丹江分院
【正文语种】中文
【中图分类】S222.51
【相关文献】
1.基于DSP的水田平地机倾角传感系统设计与试验
2.小型水田耕耙平地机旋耕刀系统实体建模
3.基于GNSS的智能水田旋耕平地机研究
4.基于小波阈值–卡尔曼的
水田旋耕平地机倾角信号的去噪方法5.水田平地机GNSS高程数据EMD与S-G 联合降噪研究
因版权原因,仅展示原文概要,查看原文内容请购买。
水田激光平地机实用技术

水田激光平地机实用技术陈君梅【摘要】田地平整对发展现代农业具有重要意义。
针对水田精细平整问题,华南农业大学研制了1PJ系列水田激光平地机,不但设有高程控制系统而且设有独立的水平控制系统。
运用该平地机平整水田,田面平整度小于3厘米,满足精细农业的要求。
该文介绍了水田激光平地机的结构和原理,分析了优势和存在的不足,列举了技术改进内容。
生产试验结果表明,该平地机实用技术取得了较好的经济、社会效益,推广应用前景广阔。
【期刊名称】《现代农业装备》【年(卷),期】2013(000)006【总页数】4页(P43-46)【关键词】水田平地机;水田平整;激光;农业机械【作者】陈君梅【作者单位】广东科学技术职业学院,广东广州 510640【正文语种】中文0 引言进行水田土地平整,可以有效改善水田表面状况,提高水田灌溉水的利用率,有利于控制杂草和虫害,提高化肥使用效率,减少环境污染,实现精细地面灌溉[1,2]。
传统的水田平整方法,包括人工平整、畜力平整、拖拉机平整和耕整机平整,都属于仿形平整,完全依靠工作人员经验和目测控制,劳动强度大,平整效率低,耗资大,且难以达到精细平整的要求。
为了解决水田精细平整的问题,华南农业大学研制了1PJ系列水田激光平地机,鉴定结论为“在水田平地技术及机具领域居国际领先水平”。
本文介绍了该水田激光平地机的总体结构和原理,分析了技术优势和存在的不足,通过技术改进后产品性能日趋稳定,提高了工作可靠性和工作效率。
示范推广应用取得了较好的经济效益和社会效益。
1 水田激光平地机总体构造及原理水田激光平地机的总体构造如图1[3]所示。
按功能可分为如下5部分。
1)动力装置。
动力装置可选用水田拖拉机或插秧机机头。
2)平地铲装置。
平地铲包括平地铲体、平地铲侧板、平地铲主拖板及副拖板。
平地铲侧板安装于平地铲体前端两侧,平地铲主拖板铰接于平地铲体后端中央,平地铲主拖板两侧设有副拖板。
平地铲侧板能有效实现平地作业时的储土填土功能,平地铲主拖板和两个副拖板,实现拖平田面和摊平自平地铲侧板溢出泥浆的功能。
平地铲系统设计论文
平地铲系统设计论文1平地铲水平闭环控制系统的设计水平控制系统闭环控制结构如图1所示,图2是系统硬件结构框图。
系统主要由姿态测量部分、非线性控制器与液压执行部分组成,各部分作用是:姿态测量部分检测平地铲水平倾角,非线性控制器根据倾角信息对电磁阀施加PWM脉宽控制信号,液压执行部分通过扭矩输出使平地铲保持在水平位置。
系统的硬件包括Cotex-M3处理器、ADIS16355及SD卡存储器等。
Cortex-M3处理器使用了ARMv7-M体系结构,具有较高的性能和较低的动态功耗[9]。
从性能能上看,Cortex-M3处理器可以作为本文的融合算法以及控制算法的硬件实现。
Cortex-M3处理器使用SPI接收来自ADIS16355的数据并保存有SD卡存储器。
其采样得到的三轴角速度和加速度计数据通过传感器信息融合测量,从而得到平地铲水平倾角;数码管用于显示当前测量角度和控制参数等,可通过按键改变显示模式和参数调整,两者组成简单的人机界面,易于调试;RS232串口主要用于接收高精度姿态航向参考系统AHRS500GA发送的数据。
2融合算法与控制算法2.1基于卡尔曼滤波的姿态解算算法利用加速度计对重力矢量进行观测,以观测值同重力常量的误差值修正陀螺对姿态角的测量值,设计卡尔曼滤波器对状态进行融合估计[10]。
根据该方案,传感器信息融合处理过程如下:1)利用式(6)计算更新四元数,并转换为姿态角。
2)观测矩阵2.2控制系统数学模型根据平地铲运动特征,建立平地铲的抽象物理模型,如图3所示。
按以下方法建立平地铲运动的载体坐标系xoy:以平地铲质心o为零点,系统输入量x为液压系统阀芯位移,输出量y为油缸位移,平地铲转动倾角为θ,建立传递函数模型。
2.3控制器的算法设计2.3.1适用于平地铲运动的控制算法考虑水田激光平地机的作业特点,控制系统在设计上必须保证平地铲在倾角角度情况下能够迅速回位到水平位置,并且尽量减少超调和避免振荡。
新型水田搅浆平地机的设计改进
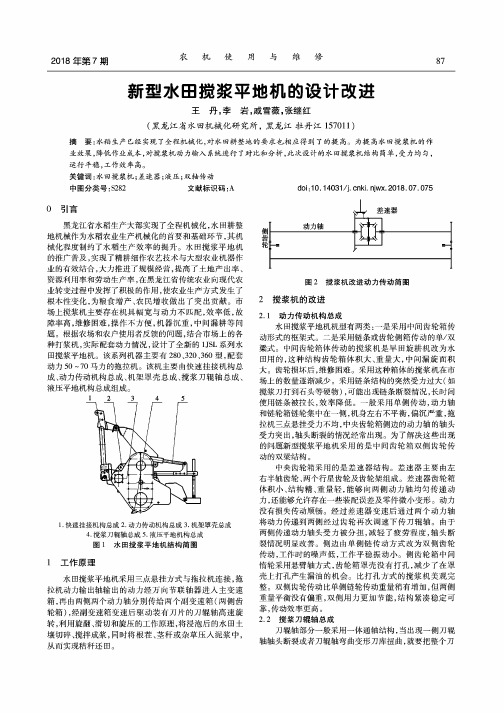
2018年第7期农机使 用与维 修87动力轴差速器图2搅浆机改进动力传动简图2搅浆机的改进2.1动力传动机构总成水田搅浆平地机机型有两类:一是采用中间齿轮箱传动形式的框架式。
二是采用链条或齿轮侧箱传动的单/双 梁式。
中间齿轮箱体传动的搅浆机是旱田旋耕机改为水 田用的,这种结构齿轮箱体积大、重量大,中间漏旋面积大。
齿轮损坏后,维修困难。
采用这种箱体的搅浆机在市 场上的数量逐渐减少。
采用链条结构的突然受力过大(如 搅浆刀打到石头等硬物),可能出现链条断裂情况,长时间 使用链条被拉长,效率降低。
一般采用单侧传动,动力轴 和链轮箱链轮集中在一侧,机身左右不平衡,偏沉严重,拖 拉机三点悬挂受力不均,中央齿轮箱侧边的动力轴的轴头 受力突出,轴头断裂的情况经常出现。
为了解决这些出现 的问题新型搅浆平地机采用的是中间齿轮箱双侧齿轮传 动的双梁结构。
中央齿轮箱采用的是差速器结构。
差速器主要由左 右半轴齿轮、两个行星齿轮及齿轮架组成。
差速器齿轮箱 体积小、结构精、重量轻,能够向两侧动力轴均匀传递动 力,还能够允许存在一些装配误差及零件微小变形。
动力没有损失传动顺畅。
经过差速器变速后通过两个动力轴 将动力传递到两侧经过齿轮再次调速下传刀辊轴。
由于 两侧传递动力轴头受力被分担,减轻了疲劳程度,轴头断 裂情况明显改善。
侧边由单侧链传动方式改为双侧齿轮 传动,工作时的噪声低,工作平稳振动小。
侧齿轮箱中间 惰轮采用悬臂轴方式,齿轮箱罩壳没有打孔,减少了在罩 壳上打孔产生漏油的机会。
比打孔方式的搅浆机美观完 整。
双侧齿轮传动比单侧链轮传动重量稍有增加,但两侧 重量平衡没有偏重,双侧用力更加节能,结构紧凑稳定可 靠,传动效率更高。
2.2搅浆刀辊轴总成刀辊轴部分一般采用一体通轴结构,当出现一侧刀辅 轴轴头断裂或者刀辊轴弯曲变形刀库扭曲,就要把整个刀〇引s黑龙江省水稻生产大部实现了全程机械化,水田耕整 地机械作为水稻农业生产机械化的首要和基础环节,其机 械化程度制约了水稻生产效率的提升。
中型水田耕耙平地机辅助机构设计
中型水田耕耙平地机辅助机构设计盛力伟【摘要】中型水田耕耙平地机是以29.4 kW拖拉机为动力进行水田耕耙和平地一体的农业机械,是现代农业水田生产不可缺少的农机用具.为此依据其工作性能及特点设计了一套高效且多性能的辅助机构.该辅助机构不仅为耕耙平地机的刀轴系统和传动系统提供安装平台,且为耕耙平地机与拖拉机的连接提供挂接装置.同时围绕整机旋耕、碎土、平地和压茬4项功能进行合理设计,因此该辅助机构性能多样、结构简单.【期刊名称】《农业工程》【年(卷),期】2018(008)008【总页数】4页(P96-99)【关键词】耕耙平地机;旋耕机;辅助机构;悬挂架;农业机械【作者】盛力伟【作者单位】黑龙江省农业机械工程科学研究院,黑龙江哈尔滨150040【正文语种】中文【中图分类】S222.2130 引言耕耙平地机是常用的农业生产工具,现实生产中根据不同的生产要求制造了大、中、小各种型号的耕耙机[1]。
根据南北水、旱田的生产环境发展了各种适用于水、旱田使用的耕耙平地机[2-3]。
中型水田耕耙机多适用于南方水田的农业机械。
现有市场上的中型水田耕耙平地机产品多种多样[4-7]。
但其整体结构大多相似,主要不同之处多是耕耙机的辅助机构。
耕耙机的辅助机构主要包括悬挂架、壳体和后平板。
悬挂架的具体结构设计决定了其与拖拉机的挂接方式;壳体部分具体结构设计决定了其动力传输方式;后平板有无压茬弹齿的设计决定了其是否具有压茬功能[8-9]。
国内外对中型水田耕耙平地机的研究很多,但对中型水田耕耙平地机辅助机构的研究却少有报道[10-13]。
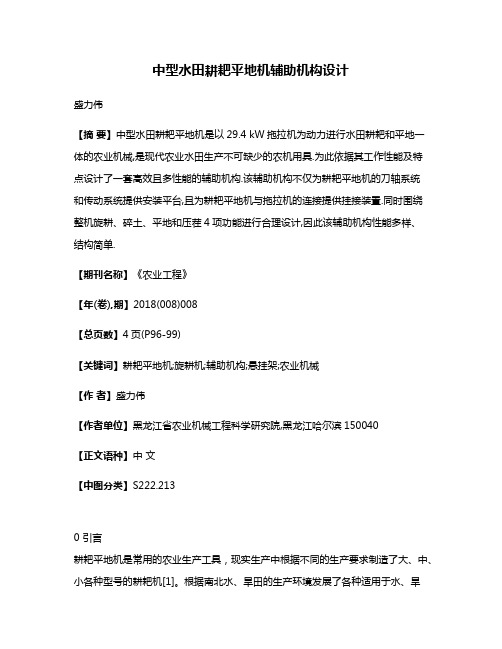
1 概论耕耙平地机的辅助机构主要包括:挂接架和立柱组成的悬挂架;罩板、后罩板、侧板及其附属构件组成的壳体;螺旋压缩弹簧组、托平板和其附属构件组成的后平板。
结构如图1所示。
1.副梁2.左主梁3.悬挂架4.右主梁5.罩焊合6.侧板焊合7.后罩板合8.托平板焊合9.小托平板焊合图1 中型水田耕耙平地机辅助机构Fig.1 Auxiliary mechanism of medium paddy field ploughing and raking grader由于中型水田耕耙平地机是适用于29.4 kW以上(包括29.4 kW)中型拖拉机带动的农用耕耙平地机,其承载车身的中型拖拉机的悬挂参数与形式和小型拖拉机有很大的不同,中型拖拉机后部设计有标准的后三点悬挂装置[14-15]。
水田激光平地机非线性水平控制系统
水田激光平地机非线性水平控制系统陈君梅;赵祚喜;陈嘉琪;俞龙;叶娟【摘要】为使水田激光平地机的平地铲在受到干扰偏离水平位置时能够迅速回复水平,设计了基于角速度-偏差角度的非线性PID控制器的平地铲调平控制系统,使平地铲零角速度渐近回到水平位置,实现零超调,提高了平地机水平控制精度和稳定性.根据平地机的机械液压系统结构搭建了平地铲调平系统动力学模型,推导了传递函数,基于剩余路径确定允许最小角度的非线性控制,设计了水平调平闭环控制系统方案.采用标准姿态航向参考系统AHRS检测平地铲实时倾角与角速度,TMS320F28035芯片作为控制器,设计制作了水平控制系统电路,依据传感器数据通过非线性PID位置控制算法计算出控制量,并通过PWM驱动电路实现平地铲水平控制.在华南农业大学研制的水田激光平地机上,进行了实验室测试与田间试验验证.测试结果表明,水平控制系统响应迅速,实现了平地铲渐进逼近水平位置的控制效果,超调小,稳态误差趋于零,平地铲基本控制在水平位置±1.以内,平地铲工作稳定.【期刊名称】《农业机械学报》【年(卷),期】2014(045)007【总页数】6页(P79-84)【关键词】水田激光平地机;水平控制;非线性PID位置控制【作者】陈君梅;赵祚喜;陈嘉琪;俞龙;叶娟【作者单位】广东科学技术职业学院,广州510640;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;华南农业大学南方农业机械与装备省部共建教育部重点实验室,广州510642;广东科学技术职业学院,广州510640【正文语种】中文【中图分类】F323.3;S222.5引言农田表面平整状况对灌溉质量和效率有着重要影响,世界范围内的大量研究表明,土地被平整后可提高作物产量20%~30%,可节水30%~50%,水田土地利用率提高7%,并可减少农药、化肥和除草剂的使用量[1-5]。
水田搅浆埋茬平地机在保护性耕作中的应用

2 0 1 3年 9月
农 业科技 与装备
c u l t u r a l S c i e nc e &Te c h no l o k w a n d Eq ui pme nt
No . 9 F o t a l No . 2 3 1
S e D.2 01 3
拖 平板 进行 3 ~ 4次碾 压 , 才能将 6 0 %土块碾 压碎 。 同
2 水 稻 高 留茬 保 护 性 耕 作 技 术
秋 季利 用水稻 联合 收割 机收 获水 稻 , 留茬 高度 为
2 5 ~ 4 0( 3 1 1 1 , 保护 土壤 免于 风蚀 。 次年春 季 , 不进 行铧 式
犁 翻地 作业 , 在 整地 前 5 ~ 7 d进行 泡 田 , 灌 水 深 度 应 在1 5 c m 以上 , 利 用水 稻高 留茬还 田整地 机或 水 田灭 茬搅 浆 整地 机进 行作 业 , 耕深 1 5 ~ 2 0 c m, 作 业 2次 后
源浪 费 。 传 统 整地技 术 和机具落 后 , 作业 质量 差 , 根 茬
3 水 田实 施保 护 性 耕 作 的意 义
3 . 1 减 少土壤风 蚀
收 稿 日期 : 2 0 1 3 — 0 7 — 2 6
前 茬作 物 收 获后 ,秸 秆 和残 茬 留在 地 表 做覆 盖 物, 可 以避免 土壤 风 蚀 沙 化及 有 机 质流 失 , 利 于 土壤 保 墒节 水 。
宽 幅大型化 发 展 。其 中 , 独 占知识性 技 术价值 构 成 了
耕 整地机 械 的主要 价值 . 成为 发展 的主 要动力 。
1 传 统 泡 田整 地 方 法 及 其 存在 的 问题
耕地机毕业设计

耕地机毕业设计耕地机毕业设计一、引言毕业设计是大学生在校期间的重要任务之一,它既是对所学知识的综合运用,也是对专业技能的考验。
本文将探讨一个有关耕地机的毕业设计,旨在展示设计的过程和思路,以及对农业发展的贡献。
二、设计背景随着农业机械化的推进,耕地机作为农业生产中的重要工具,发挥着不可替代的作用。
然而,目前市场上的耕地机存在一些问题,如效率低下、能耗高、操作复杂等。
因此,设计一种高效、节能、易操作的耕地机成为了当务之急。
三、设计目标1. 提高耕地机的耕作效率:通过优化设计,减少耕作时间,提高农民的生产效益。
2. 降低耕地机的能耗:采用新型材料和技术,降低能源消耗,减少对环境的负面影响。
3. 简化耕地机的操作:优化控制系统,使操作更加简单、方便,降低操作人员的技术要求。
四、设计方案1. 选用合适的动力系统:通过分析不同动力系统的特点和适用范围,选择最适合耕地机的动力系统,如内燃机、电动机等。
2. 优化耕地机的结构:通过减少零部件的数量和重量,降低机械摩擦,提高机器的效率和稳定性。
3. 引入智能控制系统:利用传感器和控制器,实现对耕地机的自动化控制,提高操作的便捷性和准确性。
4. 应用新型材料:采用轻质高强度材料,降低耕地机的重量,提高机器的操控性和耐用性。
5. 设计人性化的操作界面:通过人机工程学原理,设计符合人体工程学的操作界面,使操作更加简单、方便。
五、设计实施1. 确定设计所需的材料和零部件,并进行采购。
2. 制定详细的设计方案和时间表,明确每个环节的工作内容和时间节点。
3. 进行系统的设计和组装,测试各个部件的工作情况。
4. 进行实地试验,对设计的耕地机进行性能测试和优化。
5. 完善设计的细节,对可能存在的问题进行修复和调整。
6. 撰写设计报告,总结设计过程和成果。
六、设计成果通过以上的设计和实施,我们成功地开发出一种高效、节能、易操作的耕地机。
该耕地机在实际使用中,耕作效率提高了30%,能耗降低了20%,操作简单方便,受到了农民的一致好评。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由于我国土地形状复杂,类型繁多,且纬度跨越大,故我国各省的农业机械各有差异,其现代化程度不同。
我省是以水稻为主要粮食的地区,且无法适用于大规模的生产,但又是水田,泥泞土地的作业有一定的难度。
本文基于机械设计和相关的理论研究,利用减速箱,单片机和液压装置设计了一台水田平地机。
由于本人能力有限,此文只着重设计了其传动装置与平地的液压装置。
此次设计的水田平地机特点是结构简单,受力均匀,运行平稳,工作效率高。
关键词:水田平地机;耕整机;手推;液压系统设计due to land complex shapes, type range and latitude spans, of agricultural machinery in all the different, varying degrees of its modernization. I mainly hilly land in type, but with rice as the main food of the region. Cannot be applied to large-scale production, but paddy fields, muddy land a job with a certain degree of difficulty. This article is based on research on mechanical design and theories related to the, using gearboxes, hydraulic design of single-chip and a grader for paddy field. Because of my ability is limited, this article only focuses on the design of its gear and leveling of hydraulic equipment. Grader for paddy field feature of the design is simple, uniform, stable operation, high efficiency.Keywords:grader for paddy field; cultivator; hand; design of hydraulic systems摘要 (Ⅰ)ABSTRACT (Ⅱ)前言 (Ⅴ)1 绪论 (1)1.1 水田平地机在国内外的发展和使用 (1)1.2 设计水田平地机的意义 (1)1.3 作品的结构特点与优势 (2)2 水田平地机的方案选择 (3)2.1 柴油机的选择 (4)2.2 减速箱的设计 (5)2.3 设计V带 (6)2.4 齿轮的设计 (8)2.5 轴的设计 (11)3 液压系统的设计及整体方案的确定 (21)3.1 确定液压系统的压力和流量 (21)3.2 液压缸主要尺寸的确定 (22)3.3 各主要液压器件选择及其工作原理 (22)4 润滑方式的确定以及其它的一些要求 (26)5 总结 (27)参考文献 (28)致谢 (29)稻田搅浆平地机是我省广泛采用的主要水田平地机械,手推式搅浆平地机适应了我省山丘为主的主要地形形式,并且也满足了耕地的主要作业要求。
稻田搅浆平地机之所以有广泛的辅助作业能力,是由于它能完成360度运动。
他们可以单独进行,也可以组合进行。
本次研究的是一款能在我省水田中平地搅浆的机械,作业后疏松、平整的土壤更加利于之后的播种以及收割。
水耙地是水稻插秧的基础,是提高水稻单产的保证措施之一。
近几年水田搅浆技术在广大的水稻种植户中已经逐步得到广泛认可并已进行推广和应用。
搅浆平地机工作到也随着生产的需求加以改造,种类繁多。
我在前水田平地机的基础上结合平地机的工作原理对在水田平地机的基础上增添了搅浆装置,平地搅浆装置的集合不仅节省时间,减少进地次数的同时也增加了平地的水平,减少了水田耕作的成本。
1.1 水田平地机在国内外的发展和使用随着高新技术的发展及在工程机械产品上的应用,以现代微电子技术为代表的高科技正越来越普遍地用来改造工程机械产品的传统结构。
成熟技术的移植应用已大大促进了平地机综合技术水平的进一步提高。
在满足新的技术要求前提下选择合理的价位,适应不同档次的用户需求是目前平地机的发展方面。
中国市场与国外市场不同,国外发达国家的农业现代化基本已经形成,平地机的市场走势处于低谷,而中国平地机市场刚刚开始启动,另一方面中国是发展中国家,经济实力等远远落后于发达国家,多种因素决定了现阶段的中国市场对平地机不需要很高的技术含量和高的配置,只要具有同样的作业功能和较好的可靠性,具有性能价格比的优势,就会有高的市场份额。
近年来,国外平地机之所以从中国市场逐步退出不是因为国外产品的技术水平不高,而是价位太高。
进口机的价位约是国产同类机型的3倍以上。
因此,国产平地机必须在保持或略高于原同类机型价位的基础上,尽量提高整机的可靠性和操作舒适性来适应中国的市场。
从技术发展角度考虑,中国平地机的发展,依然要跟踪国际领先水平。
展望迅速发展的中国市场,加入WT0后国内市场国际化的趋势日趋明显。
参与国际交换和分工,充分利用国际先进的配套资源和科学技术,实现技术资源的优化配置,成为国内平地机制造业发展的必经之路。
中国平地机技术发展的基本特征应是:高、中、低档产品并存。
广泛使用新材料、新工艺,提高制造工艺水平,提高产品的可靠性和寿命,这是国产平地机的发展趋势。
1.2 设计水田平地机的意义随着我国现代化建设事业的迅速发展,农业现代化的建设越来越紧迫。
但由于我国土地形状复杂,类型繁多,且纬度跨越大,故我国各省的农业机械各有差异,其现代化程度不同。
我省土地类型主要以丘陵为主,但又是以水稻为主要粮食的地区。
无法适用于大规模的生产,但又是水田,泥泞土地的作业有一定的难度。
因此我省水田对平地类型的机械有一定的要求。
使用方便,外形较小,移动方便是我省现阶段水田平地机的研究意义。
1.3 作品的结构特点与优势1)通过小型柴油机作为动力源,具有小型水田也能快速工作的特点 2)体积小、质量轻、结构简单、操作方便、保养方便、成本低廉,无废气及噪音等污染。
3) 平地的高度可在20—60mm之间,横向100~200mm,,质量400kg左右(材料由45钢制作);4)前轮采用双轮耕整机构,具有良好的导向性,后面的平地船通过铰链与行走机构相连,可以大幅度拐弯。
5) 平地的效果较理想,且成本低,是小面积平地的首选产品。
2 水田平地机的方案选择据本次设计要求:设计出一台水田平地机,由现有双轮耕整机牵引,工作部件平地船通过振动、对土壤挤压,刮平、推送,实现水田中土壤的平整。
经参考众多农机类型,我设计了如图1所示双轮拖挂式水田平地机。
随着国家惠农政策的不断出台,黑龙江省水稻种植面积的不断扩大,水田农机装备的不断提高,水稻搅浆平地机以其适用、稳定、易行、节本特点成为我国水稻种植必备的平地机械。
水田搅浆平地是水稻生产中的重要环节,长期以来,水田耕整地一直延续着传统的耕整地作业模式。
主要有旱田水整、旱田灭茬水整两种形式,所以使用机具多为拖拉机配套水田犁、旋耕机、水田耙等。
这种耕作方式,机具进地次数多,费工费时,劳动强度大,作业效率低,资源浪费严重,不仅增加水田生产成本,而且作业质量不能满足插秧作业要求。
水田搅浆平地机能一次完成碎土,搅浆,压茬及平地等联合作业,田块能满足机械插秧要求。
水田平地技术的应用与传统方法相比,降低生产成本、增产、增收,还可以减少整地用水,联合作业又可以缩短整地时间,节省能源消耗,提高作业效率,实现水稻高产稳产,对促进农业增收、农民增收和保证粮食安全生产具有重要的意义。
因此,我设计的水田搅浆平地机是以柴油机为动力源,经过V 带传动将功率传给减速器,经历两级减速后又利用V 带传动将功率传递给行走的双轮,双轮拖动平地船在水田上行走,平地船与拖拉机具采用三点悬挂方式连接,三点悬挂装置的两个提升杆改用两个双作用油缸,其动作可分别控制,以实现平地具左右两侧提升和下降的独立控制,保证平地机具始终处于水平位置工作。
悬挂点以铰链连接,人站在平地船上通过手柄掌控方向。
液压控制系统控制平底船左右水平。
2.1 柴油机的选择有常识得知:正常成年人的移动速度为 3.5—5km/h ,考虑安全问题取v=4km/h=66.67m/min 。
按水田耕整作业:σK P TN n n h b = (2-1)式中: n b —耕宽,取100cmh—耕深,取10mmnK—土壤比阻,根据资料取0.36所以P=3.60kwTN1.175F—1型柴油机2.底座3.耕整双轮4.铰链5.平地船 6液压装置 7.手柄 8.减速箱图2-1 总装配简图Fig 2-1 General Assembly Drawing通过对家乡柴油机的使用情况了解,175F—1型柴油发动机的使用率特别广,它是最适合本地环境状况与交通状况的柴油机,它能满足轻小型农业机构的要求,故本次研究以龙舟-175F-1型柴油为动力源驱动。
其规格如图2所示:型号 175F-1缸径×行程(mm)75×701h功率(kw/ps) 3.65/4.95马力12h功率(kw/ps) 3.81/4.5马力标定转速(r/min) 2600润滑方式离心飞溅净质量(kg) 44图2-2 柴油机铭牌Fig 2-2 diesel engine nameplate2.2 减速箱的设计2.2.1 减速箱的传动比分配图2-3 传动装置示意图Fig 2-3 Schematic diagram of transmission device按常识,取170cm ,体重取70kg ,双臂抬起高度h=800mm 。
柴油机高500mm ,为了让人前方视野开阔,取双轮半径r=500mm 那么轮子的转速n=51.54r/min 。
确定传动装置的总传动比和分配传动比:总传动比:53.5045.512600===轮总n n i (2-2)分配传动比:取05.3=带i 则49.1605.353.5021==⨯i i21)5.13.1(i i -= 取 213.1i i = 经计算 56.32=i 56.41=i注:带i 为带轮传动比,1i 为高速级传动比,2i 为低速级传动比。
2.2.2 计算传动装置的运动和动力参数将传动装置各轴由高速到低速依次定为1轴、2轴、3轴、4轴01122334,,,ηηηη——依次为电机与轴1,轴1与轴2,轴2与轴3,轴3与轴4,之间的传动效率。
(1)各轴转速:min /85205.32600n 1r i n m ===带 (2-3)22270720985r t F F tg tg N =∂=⨯︒= 338709203169r t F F tg tg N =∂=⨯︒= 求垂直面的支反力:()()N l l l l l F l F F r r V 316941177494316994117985321322331=++⨯-+⨯=++++-=231231693169852500V r V r F F F F N =+-=+-= 计算垂直弯矩:311316741023.9.aVm V M F l N m -==⨯⨯=[]311222()316(74117)9851171053.5.aVn V r M F l l F l N m-=+-=⨯+-⨯⨯=求水平面的支承力: ()N l l l l l F l F F t t H 458694117742112707948709321322331=++⨯+⨯=+++⨯+=22312707870945866830H t t H F F F F N =+-=+-= 计算、绘制水平面弯矩图:31145867410323.aHm H M F l N m -==⨯⨯=[]321232()6830(74117)870911710295.aHn H t M F l l F l N m-=-++=-⨯++⨯⨯=求合成弯矩图,按最不利情况考虑:222223.9323323.8.am avm aHm M M M N m=+=+= (2-21)222253.5295300.an avn aHn M M M N m=+=+=求危险截面当量弯矩:从图可见,m-m,n-n 处截面最危险,其当量弯矩为:(取折合系数0.6∂=)()()NT M M am e 4118.1686.03002222=⨯+=∂+= ()()NT M M am e 4138.1686.08.32322222=⨯+=∂+='计算危险截面处轴的直径: n-n 截面:[]33314111040.90.10.160e b M d mmσ-⨯≥==⨯m-m 截面:[]'33314131040.90.10.160e b M d mmσ-⨯≥==⨯由于4245d d mm d ==>,所以该轴是安全的。