南京航空航天大学《820自动控制原理》历年考研真题汇编
②南航《820自动控制原理》、《920自动控制原理(专业学位)》考试大纲

②南航《820⾃动控制原理》、《920⾃动控制原理(专业学位)》考试⼤纲820⾃动控制原理考试⼤纲920⾃动控制原理(专业学位)考试⼤纲《⾃动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第⼀章-⾃动控制的⼀般概念:控制系统的⼀般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作⽤;对控制系统的基本要求。
第⼆章-控制系统的数学模型:控制系统动态微分⽅程的列写;⽤拉普拉斯变换求解线性微分⽅程的零初态响应与零输⼊响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应⽤。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;⼀阶系统、⼆阶系统的阶跃响应,典型⽋阻尼⼆阶系统动态性能指标的计算;输⼊引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输⼊作⽤下,不同类型系统的稳态误差;扰动引起的误差的定义与计算⽅法;减⼩稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相⾓条件;根轨迹绘制的基本法则;⼴义根轨迹;主导极点与偶极⼦的概念及其应⽤。
第五章-线性系统的频域分析法:频率特性的概念及其图⽰法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最⼩相⾓系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正⽹络的设计;串联迟后校正⽹络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分⽅程的概念;差分⽅程的求取与求解;⾹农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-⾮线性控制系统分析知识点:⾮线性控制系统概述;常见⾮线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;⽤描述函数法判断⾮线性系统稳定性;⾃激振荡的判断、⾃振参数的确定。
自动控制原理2015年南京航空航天大学硕士研究生考试真题

南京航空航天大学2015年硕士研究生入学考试初试试题(A 卷)科目代码: 820科目名称:自动控制原理满分: 150分注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!本试卷共10大题,满分150分一、(本题15分) 试用梅森公式求图1所示系统的传递函数()()C s R s 和()()E s R s 。
图1二、(本题15分) 设一反馈控制系统如图2所示,试选择1K 、2K 以使系统同时满足下列性能指标要求:(1) 当单位斜坡输入时,系统的稳态误差0.35ss e ≤; (2) 闭环系统的阻尼比0.707ζ≤;(3) 调节时间3s t ≤秒。
图2三、(本题15分) 设系统的闭环特征方程为0846322345=−−−−+s s s s s ,试用劳斯稳定判据判别该系统的闭环稳定性,并求出其全部闭环特征根。
1(2)K s s +2K sR (s )C (s )四、(本题15分) 设系统的闭环特征方程为2()(1)0s s a K s +++=,)0(>a1.当10a =时,绘制K : 0~∞变化时的系统闭环根轨迹,并求出系统阶跃响应分别为无超调、阻尼振荡时K 的取值范围;2.若使根轨迹只具有一个非零分离点,求出此时a 的取值?并画出此a 值下K : 0~∞变化时的系统闭环根轨迹。
五、(本题15分) 设单位反馈控制系统的开环传递函数为21)(sas s G +=,试确定相角裕度为45°时的a 值。
六、(本题15分) 如图3所示,最小相位系统开环对数幅频渐近特性为)(ωL ′,串联校正装置对数幅频特性渐近特性为)(ωc L 。
1.求未校正系统开环传递函数)(0s G 及串联校正装置)(s G c ;2.在图中画出校正后系统的开环对数幅频渐近特性)(ωL ′′,并求出校正后系统的相位裕度γ′′;3.简要说明这种校正装置的特点。
自动控制原理(专业学位)2016年南京航空航天大学硕士研究生考试真题

南京航空航天大学2016年硕士研究生招生考试初试试题(A 卷)科目代码: 920科目名称:自动控制原理(专业学位)满分: 150分注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!本试卷共10大题,满分150分一、(本题15分) 某系统由下列微分方程组描述1122113224334()()()()()()()()()()()()()()()x t k r t x t x t xt x t x t x t k r t c t x t k x t c t ct x t =−=+=+−=−=&& 式中123,,k k k 均为常量,()r t 为输入,()c t 为输出,画出系统的结构图,并求传递函数()/()C s R s 。
二、(本题15分) 已知系统的结构图如图1所示,观测t t r ωsin )(=的系统响应,发现当3=ω时系统输出)(t c 幅值最大,要求:1. 试确定K 值,并写出系统的闭环传递函数;2. 求单位阶跃响应的超调量%σ、调节时间S t ,并概略绘出单位阶跃响应曲线;3. 若t t r 8.11)(+=,求系统的稳态误差ss e 。
(2)Ks s +()R s −()C s 图1三、(本题15分) 某单位负反馈系统的开环传递函数为2)3()(+=s s Ks G ,请问K 为何值时系统的单位阶跃响应无超调,且在单位斜坡输入下的稳态误差25.2≤ss e 。
四、(本题15分) 单位负反馈系统的开环传递函数为]1)3)[(1()(2++−=s s Ks G1. 绘制系统的闭环根轨迹(∞~0:K ),并求出分离点处的闭环传递函数;2. 确定系统稳定的K 值范围;3. 确定系统闭环极点全部为实数且系统能正常工作时K 值范围。
五、(本题15分) 设一单位负反馈系统的开环传递函数为)11.0(100)(01.0+=−s s e s G s,现有三种串联最小相位校正装置,它们的伯德(Bode)图如图2中的(a )、(b )、(c )所示。
全国名校自动控制原理考研真题汇编(含部分答案)
2013年中国 学技术大学848 动控制原理
2014年中国 学技术大学848 动控制原理
5.北京
天大学 动控制原பைடு நூலகம் 合
2012年北京
天大学931 动控制原理 合
2013年北京
天大学931 动控制原理 合
2014年北京
天大学931 动控制原理 合
6.山东大学 动控制原理
2016年山东大学847 动控制原理(含现代控制理 )
8.其他院校自动控制原理考研 真题(含部分答案)
2010年华中科技大学829自动控制原理考研真 题及答案
2011年南京大学961自动控制原理考研真题
2011年重庆大学839自动控制原理一考研真题
2013年厦门大学844自动控制原理考研真题
2013年华南理工大学813自动控制原理考研真 题
2014年华南理工大学813自动控制原理考研真 题
2015年华南理工大学813自动控制原理考研真 题
2016年华南理工大学813自动控制原理考研真 题
2017年华南理工大学813自动控制原理考研真 题
2018年华南理工大学813自动控制原理考研真 题
2012年电子科技大学839自动控制原理考研真 题及详解
参 案:
2013年电子科技大学839自动控制原理考研真 题及详解
参 案:
2014年电子科技大学839自动控制原理考研真 题
4.中国科学技术大学自动控制 原理考研真题
2013年中国科学技术大学848自动控制原理考 研真题
6.山东大学自动控制原理考研 真题
2016年山东大学847自动控制原理(含现代控 制理论)考研真题
2017年山东大学847自动控制原理(含现代控 制理论)考研真题
2012年南京航空航天大学820自动控制原理考研初试真题(A卷)

820 自动控制原理 第 3 页 共 4 页
πA 1.分析周期运动的稳定性; 2.求出稳定周期运动的振幅 A 和频率 ω 以及 c(t) 表达式。
图6
九. (本题 15 分) 某系统的状态空间模型为 x&1(t) = −x1(t) + 5x2 (t) x&2 (t) = −6x1(t) + u(t) y(t) = x1(t)
现采用状态反馈控制策略,即 u(t) = −k1x1(t) − k2x2 (t) + r(t) ,其中 k1,k2 为实常数,
R(s)
Gc(s)
K1 s(Ts + 1)
K 2 C分) 已知采样系统的结构图如图 5 所示,要求:
1.若使系统在 r(t) = t 作用时稳态误差为 0.1,试确定采样周期 T 的值;
2.求系统在上述采样周期下的单位阶跃响应 c* (t) (写出前三项即可)。
提示:Z[
四. (本题 15 分) 某系统的结构图如图 3,若要求输入信号 r(t) = t 时,稳态 误差 ess ≤ 2.25 ,同时系统单位阶跃响应无超调,试确定 K1 的值。
R(s)
1
C(s)
K1
s(s + 3)2
图3
五. (本题 15 分) 某单位负反馈系统的开环传递函数为
G(s)
=
K (0.2s +1)(0.1s +1) s2(s +1)(0.01s +1)
自动控制原理2013年南京航空航天大学硕士研究生考试真题
r(t) = 0
K M
4
c(t)
s(s2 +2s +4)
图6 科目代码:820 科目名称:自动控制原理 第 3 页 共 4 页
梦想不会辜负每一个努力的人
九.(本题 15 分) 已知系统的状态空间表达式为
x
=
⎡0 ⎢⎣1
2⎤ 1⎥⎦
x
+
⎡1⎤ ⎢⎣1⎥⎦
六.(本题 15 分) 已知某系统结构图如图 4 所示,K > 0 ,输入 r(t) = Acos 3t 时,从示 波器中观测到输入、输出的幅值相等,相位差为 90o。
1.确定参数 a,K ; 2.若输入 r(t) = 3cosωt ,确定 ω 为何值时,稳态输出 c(t) 的幅值最大,并求出此 最大幅值。
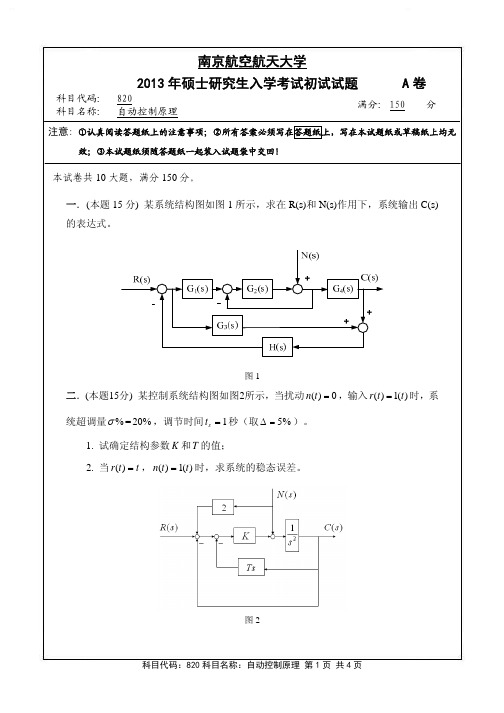
一.(本题 15 分) 某系统结构图如图 1 所示,求在 R(s)和 N(s)作用下,系统输出 C(s) 的表达式。
图1
二.(本题15分) 某控制系统结构图如图2所示,当扰动 n(t) = 0 ,输入 r(t) = 1(t) 时,系
统超调量σ % = 20% ,调节时间 ts = 1 秒(取 ∆ = 5% )。 1. 试确定结构参数 K 和T 的值; 2. 当 r(t) = t , n(t) = 1(t) 时,求系统的稳态误差。
图3
五.(本题 15 分) 某单位负反馈系统的开环传递函数为
G(s) =
200
s(s + 1)(s + 100)
设计一校正网络,使校正后的系统超调量σ % 为原系统的 50%(允许误差 ± 5% )。并
计算校正前后系统的调节时间。 [ 提示:高阶系统频域性能指标与时域性能指标的关系为:
新版南京航空航天大学电子信息考研经验考研参考书考研真题
在很多年之前我从来不认为学习是一件多么重要的事情,那个时候我混迹于人群之中,跟大多数的人一样,做着这个时代青少年该做的事情,一切都井井有条,只不过,我不知做这些是为了什么,只因大家都这样做,所以我只是随众而已,虽然考上了一个不错的大学,但,我的人生目标一直以来都比较混乱。
但是后来,对世界有了进一步了解之后,我忽而发现,自己真的不过是这浩渺宇宙中的苍茫一粟,而我自身的存在可能根本不能由我自己来把握。
认识到个体的渺小之后,忽然有了争夺自己命运主导权的想法。
所以走到这个阶段,我选择了考研,考研只不过是万千道路中的一条。
不过我认为这是一条比较稳妥且便捷的道路。
而事到如今,我觉得我的选择是正确的,时隔一年之久,我终于涅槃重生得到了自己心仪院校抛来的橄榄枝。
自此之后也算是有了自己的方向,终于不再浑浑噩噩,不再在时代的浪潮中随波逐流。
而这一年的时间对于像我这样一个懒惰、闲散的人来讲实在是太漫长、太难熬了。
这期间我甚至想过不如放弃吧,得过且过又怎样呢,还不是一样活着。
可是最终,我内心对于自身价值探索的念头还是占了上峰。
我庆幸自己居然会有这样的觉悟,真是不枉我活了二十多个春秋。
在此写下我这一年来的心酸泪水供大家闲来翻阅,当然最重要的是,干货满满,包括备考经验,复习方法,复习资料,面试经验等等。
所以篇幅会比较长,还望大家耐心读完,结尾处会附上我的学习资料供大家下载,希望会对各位有所帮助,也不枉我码了这么多字吧。
南京航空航天大学电子信息的初试科目为:(101)思想政治理论(201)英语一(302)数学二(820)自动控制原理或(833)模拟电路参考书目为:(820)自动控制原理《自动控制原理》(第2版),陈复扬主编,国防工业出版社,2013.08《自动控制原理习题详解与考研辅导》,陈复扬主编,国防工业出版社,2014.01先说一下我的英语单词复习策略真题阅读的做法第一遍,做十年真题【剩下的近三年的卷子考试前2个月再做】,因为真题要反复做,所以前几遍都是把自己的答案写在一张A4纸上,第一遍也就是让自己熟悉下真题的感觉,虐虐自己知道英语真题的大概难度,只做阅读理解,新题型完形填空啥的也不要忙着做,做完看看答案,错了几个在草稿纸上记下来就好了,也不需要研究哪里错了为什么会错…第一遍很快吧因为不需要仔细研究,14份的试卷,一天一份的话,半个月能做完吧,偷个懒一个月肯定能做完吧【第一遍作用就是练练手找到以前做题的感觉,千万不要记答案,分析答案…】ps:用书选择:木糖英语闪电单词+木糖英语真题。
南京航空航天大学820自动控制原理2012—2018年考研真题试题

r(t)
20
c(t)
s(0.2s +1)
Kts
图2
三. (本题 15 分) 已知某单位负反馈二阶系统,其开环极点数大于开环零点 数,在输入信号 r(t) = 1 + 2t + 3t 2 时,系统稳态误差 ess = 0.2 ,试求该系统
截止频率ωc = 10 时的相角裕度 γ 。
820 自动控制原理 第 1 页 共 4 页
1. 请概略绘制系统的开环对数频率特性曲线(波德图),并判定使系统闭环 稳定的 K 值范围; 2. 绘制 K 从 0 → ∞ 时闭环特征根的轨迹,利用波德图中信息给出根轨迹穿 过 S 平面虚轴时的 K 和 ω 。
六. (本题 15 分) 系统结构图如图 4 所示( K1 、 K 2 、T 均大于零) 1. 当 Gc (s) = 1时,试判断系统的稳定性; . 2. 若系统不稳定,加入校正网络 Gc (s) = τs + b ,试求此时使系统稳定τ 和 b 应满足的条件。
πA 1.分析周期运动的稳定性; 2.求出稳定周期运动的振幅 A 和频率 ω 以及 c(t) 表达式。
图6
九. (本题 15 分) 某系统的状态空间模型为 x&1(t) = −x1(t) + 5x2 (t) x&2 (t) = −6x1(t) + u(t) y(t) = x1(t)
现采用状态反馈控制策略,即 u(t) = −k1x1(t) − k2x2 (t) + r(t) ,其中 k1,k2 为实常数,
N (s)
R(s)
C(s)
G1 ( s )
G2 (s)
图1
二. (本题 15 分) 某系统的结构图如图 2 所示,要求: 1. Kt = 0 时,求系统在单位阶跃输入信号作用下的时域动态性能指标,超 调量σ % 和调节时间 ts ( Δ = 5% ),并概略绘出单位阶跃响应曲线 h(t) ; 2. 接上测速反馈 Kt s ,要求阻尼比ξ = 1 ,试确定 Kt 值,此时σ % = ? ,ts = ? , 并概略绘出单位阶跃响应曲线。
南航820自动控制原理
南航820自动控制原理英文回答:The automatic control principle of China Southern Airlines Flight 820 is based on a combination of various systems and components that work together to ensure the safe and efficient operation of the aircraft. The main components involved in the automatic control system are the flight control computers, sensors, actuators, and the autopilot.The flight control computers are responsible for processing and analyzing the data received from the sensors and determining the appropriate control inputs. These computers use algorithms and control laws to calculate the desired aircraft attitude, speed, and trajectory. They also take into account factors such as wind conditions, aircraft weight, and engine performance.The sensors play a crucial role in providing thenecessary information to the flight control computers. These sensors include the air data sensors, which measure parameters such as airspeed, altitude, and angle of attack, and the inertial reference system, which providesinformation about the aircraft's position, attitude, and velocity. Other sensors, such as the engine sensors and the flight control surface position sensors, also contribute to the overall control of the aircraft.Once the flight control computers have determined the desired control inputs, the actuators come into play. These actuators, which include hydraulic and electric systems,are responsible for physically moving the flight control surfaces, such as the ailerons, elevators, and rudder, to achieve the desired aircraft response. The autopilot, which is a part of the automatic control system, can also engage the actuators to maintain the desired flight parameters without pilot intervention.To illustrate the automatic control principle in action, let's consider a scenario where the aircraft encounters turbulence during the flight. The sensors detect changes inairspeed, altitude, and attitude, and relay this information to the flight control computers. The computers analyze the data and determine the appropriate control inputs to counteract the turbulence. The actuators then move the flight control surfaces accordingly to stabilize the aircraft and maintain the desired flight parameters. The autopilot can also be engaged to assist in maintaining a smooth and stable flight.中文回答:南航820的自动控制原理基于各种系统和组件的组合,它们共同工作以确保飞机的安全和高效运行。
自动控制原理(专业学位)2015年南京航空航天大学硕士研究生考试真题
十、(本题 15 分) 已知系统的状态空间表达式为:
⎡−1 −2 −2⎤ ⎡2⎤
x&
=
⎢ ⎢
0
−1 −1⎥⎥ x + ⎢⎢0⎥⎥ u
⎢⎣ 1 0 −1⎥⎦ ⎢⎣1⎥⎦
y = [1 0 0] x
1.用状态反馈将系统闭环极点配置在-1、-2、-2; 2.该系统的状态观测器是否存在?若存在,请设计一个极点为-2、-2、-3 的全维状 态观测器;
梦想不会辜负每一个努力的人
南京航空航天大学
科目代码: 科目名称:
2015 年硕士研究生入学考试初试试题( A 卷 )
920 自动控制原理(专业学位)
满分: 150 分
注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无
效;③本试题纸须随答题纸一起装入试题袋中交回!
本试卷共 10 大题,满分 150 分
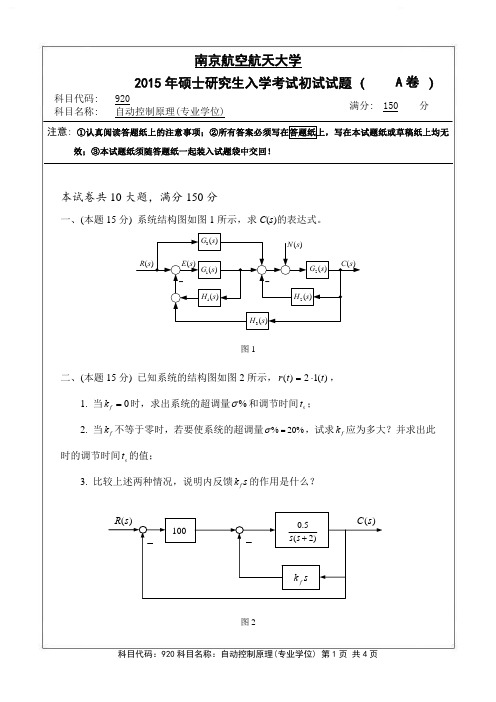
一、(本题 15 分) 系统结构图如图 1 所示,求 C(s)的表达式。
G3 (s)
R(s)
E(s)
G1 ( s)
−
H1(s)
N (s)
C(s) G2 (s) − H 2 (s)
H3(s)
图1
二、(本题 15 分) 已知系统的结构图如图 2 所示, r(t) = 2 ⋅1(t) , 1. 当 k f = 0 时,求出系统的超调量σ % 和调节时间 ts ; 2. 当 k f 不等于零时,若要使系统的超调量σ % = 20% ,试求 k f 应为多大?并求出此
为无超调、阻尼振荡时 K 的取值范围; 2.若使根轨迹只具有一个非零分离点,求出此时 a 的取值?并画出此 a 值下 K: 0~
南京航空航天大学 自动控制原理 专业学位 考研专业课真题硕士研究生入学试题

Rs
G1 H1
G4 G2
Y s
G3
H2 N s
图1
二(本题 15 分)控制系统如图 2 所示,其中 K1 、 K 2 为正的常数, 为非负常数,试 分析:
1. 值对系统稳定性的影响; 2. 值对系统单位阶跃响应动态性能的影响; 3. 值对系统单位斜坡响应稳态性能的影响。
R(s) E(s) K1
R(s)
C(s)
as 1
G(s)
图6 七、(本题 15 分)一离散系统如图 7 所示,采用单速同步采样方式工作,其中T 0.4 秒, 试分析:
1. 求控制器的脉冲传递函数表达式 G c (z) ; 2. 判断使系统稳定的 K 值范围; 3. 若 K 2.5 ,求在单位阶跃输入时,系统的稳态误差 e* () 。
南京航空航天大学
科目代码: 科目名称:
2018 年硕士研究生入学考试初试试题( A 卷 )
920 自动控制原理(专业学位)
满分: 150 分
注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无
效;③本试题纸须随答题纸一起装入试题袋中交回!
本试卷共 10 大题,满分 150 分 一、(本题 15 分)已知某系统结构如图 1 所示,求Y (s) 的表达式。
的输出信号 c 的自振振幅和频率,分别画出信号 c、x、y 的稳态波形。
r0 x
1
y
5
c
0
s(s 2)2
1
2
图8
九、(本题 15 分)已知系统的状态空间表达式为
x
0 2
2 0
x
0 2
u
y 1 0 x
1. 分析该系统的能控性和能观性; 2. 设采样周期为T ,求离散化后系统的状态空间表达式; 3. 试求当离散化后系统能控能观时 T 的取值范围。
2017年南京航空航天大学820研究生入学考试真题
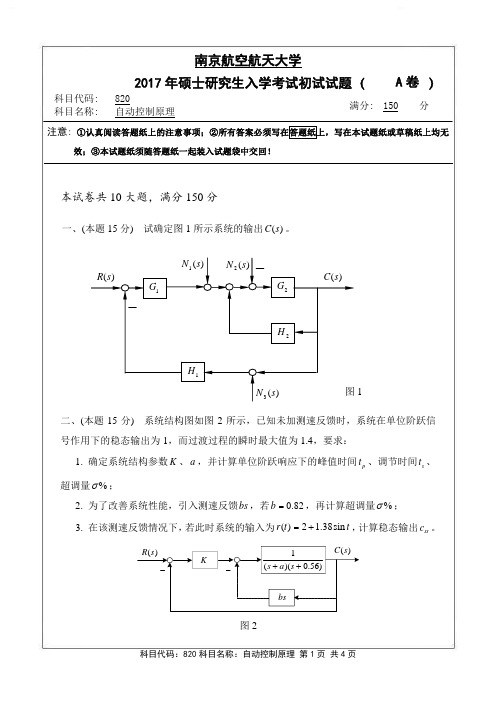
南京航空航天大学2017年硕士研究生入学考试初试试题(A 卷)科目代码: 820科目名称:自动控制原理满分: 150分注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!本试卷共10大题,满分150分一、(本题15分) 试确定图1所示系统的输出)(s C 。
图1二、(本题15分) 系统结构图如图2所示,已知未加测速反馈时,系统在单位阶跃信号作用下的稳态输出为1,而过渡过程的瞬时最大值为1.4,要求:1. 确定系统结构参数K 、a ,并计算单位阶跃响应下的峰值时间p t 、调节时间s t 、超调量%σ;2. 为了改善系统性能,引入测速反馈bs ,若0.82b =,再计算超调量%σ;3. 在该测速反馈情况下,若此时系统的输入为()2 1.38sin r t t =+,计算稳态输出ss c 。
()R s ()C s K1()(0.56)s a s ++bs−−图21G2G 2H 1H)(s R)(s C )(1s N )(2s N )(3s N三、(本题15分) 已知单位负反馈系统的开环传递函数为)1)(1()(++=s Ts s Ks G ,其中0>K 、0>T 。
试确定使闭环系统稳定时,参数K 、T 应满足的关系;并计算在输入)(1)(t t t r ⋅=作用下系统的稳态误差。
四、(本题15分) 已知某系统结构图如图3所示,其中K 、T 均大于0。
在输入)(t r 作用下,具有如图4所示的输出)(t c 曲线。
0.15r(t)c(t)tc(t)01图3 图4 试求:1. 此时的K 值;2. 试绘制T 从∞→0变化的闭环系统根轨迹;3. 系统在临界阻尼时的T 值。
五、(本题15分) 某单位负反馈系统为最小相角系统,其开环频率特性如图5所示,其中B(j 3,3−−)点对应的频率为23=ω, 1. 求系统的开环传递函数; 2. 若增加校正装置bs a s K s G c ++=)()(以使系统的相角裕度达到45°且在斜坡输入时的稳态误差降低为原来的0.5倍,并要求系统型别和阶数不变,确定参数a 、b (0,0>>b a );并概略绘制出此时的开环Bode 图。