第二届安徽省工业机器人技术应用技能大赛暨第三届全国工业
第四届安徽省工业机器人技术应用技能大赛理论样题-发布(含答案)

第四届安徽省工业机器人技术应用技能大赛理论考试(样题)1.下列哪个系统是完成焊接作业的核心设备( D )。
A.外围控制系统B.机器人系统C.总控制系统D.焊接系统2.通常所说的焊接机器人主要指的是( B )。
1)点焊机器人; 2)弧焊机器人; 3)等离子焊接机器人; 4)激光焊机器人 A.1)2) B.1)2)4) C.1)3) D.1)2)3)4)3.模拟通信系统与数字通信系统的主要区别是( B )。
A.载波频率不一样B.信道传送的信号不一样C.调制方式不一样D.编码方式不一样4.如果末端装置、工具或周围环境的刚性很高,那么机械手要执行与某个表面有接触的操作作业将会变得相当困难。
此时应该考虑( A )。
A.柔顺控制B.PID 控制C.模糊控制D.最优控制5.传感器的基本转换电路是将敏感元件产生的易测量小信号进行变换,使传感器的信号输出符合具体工业系统的要求。
一般为( A )。
A.4~20mA ,–5~5VB.0~20mA ,0~5VC.-20~20mA ,–5~5VD.-20~20mA ,0~5V 6.传感器的输出信号达到稳定时,输出信号变化与输入信号变化的比值代表传感器的( D )参数。
A.抗干扰能力 B.精度 C.线性度 D.灵敏度 7.六维力与力矩传感器主要用于( B )。
A.精密加工B.精密测量C.精密计算D.精密装配 8.气吸式执行器又可分为( D )三类。
A.真空气吸、喷气式负压气吸、吸气式负压气吸B.真空气吸、吸气式负压气吸、挤压排气式负压气吸C.喷气式负压气吸、吸气式负压气吸、挤压排气负压气吸D.真空气吸、喷气式负压气吸、挤压排气负压气吸9.工业机器人与PLC 之间的通信方式包括( D )。
①ProfiNET 通信 ②Profibus DP 通信 ③CC -LINK 通信 ④Ethernet/IP 通信 ⑤DeviceNET 通信 A.①② B.①②③ C.③④⑤ D.①②③④⑤10.RFID 按应用频率的不同分为( B )。
工业机器人技术应用技能大赛调试任务 样题

2017年中国技能大赛——第二届全国工业机器人技术应用技能大赛工作站应用与调试任务(样题)选手须知:工位号:1、任务书共13页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2、本场比赛为实操部分第二阶段比赛,包含任务三和任务四,时间为6小时;选手在竞赛过程中创建的程序文件必须存储到“D:\技能大赛\工位号”文件夹下。
3、选手提交的试卷不得出现学校、企业、姓名等与身份有关的信息,否则成绩无效。
4、由于操作不当等原因引起工业机器人及I/O组件、智能视觉系统、PLC、伺服电机及驱动器的损坏,将依据扣分表进行处理。
5、在完成任务过程中,请及时保存程序及数据。
任务描述:现公司新装配完成一套多品种物料转运码垛智能工作站,需要调试工程人员的您完成设备的调试工作,并优化程序流程及工艺,提高工作效率和工作质量。
设备功能如下:1、设备具有手动模式和自动模式两种工作模式(通过操作面板上的手动/自动旋钮切换);2、手动模式下:(1)通过示教器控制四轴工业机器人自动完成多品种物料的转运操作;(2)通过示教器控制六轴工业机器人自动完成规定尺寸图形绘制和物料转运码垛;(3)通过触摸屏按钮控制伺服电机旋转(方向、角度、速度),并且能在触摸屏上显示转盘的实时角度;同时触摸屏实时显示六轴已转运完成的物料颜色。
(4)手动点击视觉检测系统面板上的检测按钮,能在屏幕上显示正确的颜色结果。
3、自动状态下:(1)按下急停按钮,所有信号均停止输出,放松急停按钮,复位指示灯以1Hz频率闪烁,按下复位按钮,复位灯常亮,使用示教器启动两个工业机器人并回安全点,夹具松开,转盘回0度位置,复位灯灭,启动按钮指示灯以1Hz频率闪烁;(2)按下启动按钮后,启动按钮指示灯常亮,启动四轴工业机器人完成物料转运操作;同时六轴工业机器人根据任务书要求选择合适的夹具在画图板上绘制预定的图形;(3)转盘顺时针旋转180度,且六轴工业机器人完成规定图形绘制后,六轴工业机器人选择合适的夹具,抓取物料放在指定位置(根据颜色区分);同时,在料盘有料的前提下,四轴工业机器人在另一工位完成转运操作;(4)转盘顺时针旋转180度,重复上述动作;(5)完成12个物料的转运码垛后,一个工作流程结束,启动按钮指示灯熄灭,停止按钮指示灯常亮。
全国工业机器人技术应用技能大赛获奖名单
全国工业机器人技术应用技能大赛获奖名单一、比赛背景二、获奖名单1. 一等奖2. 二等奖3. 三等奖4. 优秀奖三、获奖者介绍1. 一等奖获得者2. 二等奖获得者3. 三等奖获得者4. 优秀奖获得者四、结语一、比赛背景全国工业机器人技术应用技能大赛是由我国工程机器人技术应用协会主办的一项重要赛事,旨在促进工业机器人技术的创新和应用,提高工业自动化水平,推动工业制造转型升级。
本届比赛共有来自全国各地的近千支队伍参与角逐,经过激烈的角逐,评选出了一等奖、二等奖、三等奖和优秀奖共四个奖项,并为获奖选手颁发了荣誉证书和奖金奖品。
二、获奖名单1. 一等奖获奖队伍:XX省XX市XX公司队长:XXX奖金:XXXX元奖品:XXXXX获奖项目:XXXXX2. 二等奖获奖队伍:XX省XX市XX公司队长:XXX奖金:XXXX元奖品:XXXXX获奖项目:XXXXX3. 三等奖获奖队伍:XX省XX市XX公司队长:XXX奖金:XXXX元奖品:XXXXX获奖项目:XXXXX4. 优秀奖获奖队伍:XX省XX市XX公司队长:XXX奖金:XXXX元奖品:XXXXX获奖项目:XXXXX三、获奖者介绍1. 一等奖获得者XX省XX市XX公司队伍凭借出色的技术和卓越的表现,获得本次比赛的一等奖。
队长XXX,技术过硬,团队合作默契,展现出极高的专业素养和团队协作能力,赢得了评委和观众的一致好评。
2. 二等奖获得者XX省XX市XX公司队伍凭借出色的技术和卓越的表现,获得本次比赛的二等奖。
队长XXX,对工业机器人技术应用有着深厚的造诣,能够在复杂的情况下迅速做出正确的决策,为队伍取得优异成绩贡献良多。
3. 三等奖获得者XX省XX市XX公司队伍凭借出色的技术和卓越的表现,获得本次比赛的三等奖。
队长XXX,在比赛中展现出极强的应变能力和技术实力,为整个队伍注入了无穷的动力。
4. 优秀奖获得者XX省XX市XX公司队伍凭借出色的技术和卓越的表现,获得本次比赛的优秀奖。
2019中国技能大赛——第三届全国工业机器人技术应用技能大赛
2019中国技能大赛——第三届全国工业机器人技术应用技能大赛技术点评专家组长李瑞峰一、弘扬爱岗敬业、精益求精的工匠精神本届大赛定位二、培育支撑中国制造、中国创造的高技能人才队伍三、重点考察“四新、两综合”新知识新工艺新方法新技能知识的综合性能力的综合性动手动脑的能力创新的能力现场应变能力一、紧密结合工业机器人技术的发展要求,引入新的考核知识点1.增加AGV自动导航机器人的应用,引入物流机器人技能考核;2.AGV、SCARA和六轴工业机器人协同配合;3.增强机器人智能视觉系统的作用;4.增加生产线设计、布局及仿真功能。
二、涵盖应用领域广目前桌面型工业机器人主要应用于3C行业中物料的搬运、装配、码垛、打磨等工序,结合工业现场实际,本次大赛采用五大任务模块通过工业现场实际部件的装配、加工、打磨、检测等环节巧妙的融合了工业机器人所有轨迹运动和点对点运动的典型应用。
三、突出生产实际,强调竞赛过程符合实际生产模式本届比赛过程完全按照企业的实际生产流程(安装、检测、编程调试、程序优化、测试、定型)进行,提供企业使用的装调资料(机械装配图、工艺流程卡、电气原理图、气动原理图、电气接线图等),以大赛的形式引领生产流程标准化。
四、弘扬工匠精神、注重细节弘扬工匠精神,不仅要从容独立、踏实务实,还要摒弃浮躁、宁静致远,更要精致精细、执着专一。
本届大赛要求选手在装配过程中必须遵循相关的工艺、规范和标准,如:工作站整体布局要求装配尺寸误差±2mm,每一根扎带距离均匀分布、间距5cm,每一个插针的使用标准,需要参赛选手严格按照公布的工艺、规范和标准进行操作。
五、智能物料传送、面向智能制造本次竞赛任务采用AGV进行物料供给,其调度系统打破以往1:N的调度模式,本次竞赛任务AGV可在5G环境下完成N:N模式的调度与控制,并实时上传坐标信息。
六、竞赛任务多元化、平台具有开放性竞赛任务设置综合考虑选手对工业机器人系统应用相关技术技能水平,竞赛任务多元化,可以实现基于工业机器人应用系统任务的动作流程设计,夹具、载具及执行机构的选择,工业机器人系统安装、调试、示教及离线编程,PLC编程,HMI组态编程,视觉等传感器技术的应用。
全国职业院校技能大赛工业机器人技术应用赛项(高职组)竞赛任务书
全国职业院校技能大赛工业机器人技术应用赛项(高职组)竞赛任务书选手须知:1.任务书共 17 页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2.试题中分拣工件分为汇博平台和合心平台,参赛选手根据所选平台完成任务。
3.竞赛任务完成过程配有两台编程计算机,参考资料(包括PLC的I/O分配表,码垛机使用说明等)放置在“D:\参考资料”文件夹下。
4.参赛队应在4小时30分钟内完成任务书规定内容;选手在竞赛过程中创建的程序文件存储到“D:\技能竞赛\竞赛编号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分。
5.选手提交的试卷不得出现学校、姓名等与身份有关的信息。
6.由于错误接线、操作不当等原因引起机器人控制器及I/O组件、智能视觉系统、PLC、变频器、AGV机器人的损坏,将依据扣分表进行处理。
7.在完成任务过程中,请及时保存程序及数据。
场次:工位号:日期:竞赛设备描述:“工业机器人技术应用”竞赛在“HBHX-RCPS-C10型工业机器人技术应用实训平台”上进行,该设备由工业机器人、AGV机器人、托盘流水线、工件盒流水线、视觉系统和码垛机立体仓库等六大系统组成,如图1所示。
图1 竞赛平台结构图系统的工作目标是码垛机从立体仓库中取出工件放置于AGV机器人上部输送线,通过AGV 机器人输送至托盘流水线,由视觉系统对工件进行识别,然后工业机器人对工件进行分拣装箱。
图2为需要分拣的工件。
默认从左至右、从上到下工件编号为1-6号。
1 2 3 4 5 6图2 需要分拣的工件(汇博平台)1 2 3 4 56图2 需要分拣的工件(合心平台)托盘结构以及托盘放置工件的状态如图3所示,托盘两侧设计有档条,两条档条的中间为工件放置区。
图3 分拣工件放置于托盘中的状态系统中托盘流水线和工件盒流水线工位分布如图4所示。
图4 托盘流水线和流水线工位分布系统中主要模块的IP地址分配如下表1所示。
表1 主要功能模块IP地址分配表注意:码垛机单元的三个变频器的IP地址依次是:192.168.8.14;192.168.8.15;192.168.8.16选手不得用作其它模块。
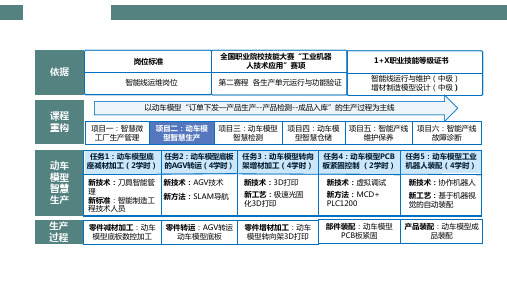
教学能力比赛整体教学设计课程内容重构(附源图)
入库
型智慧仓储
任务一:动车模型转向架3D打印(4学时) 任务二:动车模型底座数控加工(2学时) 任务三:动车模型底板的AGV转运(4学时) 任务四:动车模型PCB板紧固控制 (2学时) 任务五:动车模型工业机器人装配(4学时)
数字孪生技术 RFID技术 机器视觉 自主导航AGV MES 在线检测 工业互联网
PCB板紧固
品装配
依据
课程 重构
岗位标准 智能线运维岗位
全国职业院校技能大赛“工业机器 人技术应用”赛项
第二赛程 各生产单元运行与功能验证
1+X职业技能等级证书
智能线运行与维护(中级) 增材制造模型设计(中级)
以动车模型“订单下发--产品生产--产品检测--成品入库”的生产过程为主线
项目一:智慧微 项目二:动车模 项目三:动车模型 项目四:动车模 项目五:智能产线 项目六:智能产线
智
订单 项目一:智慧生产组 下发 织管理(6学时)
慧
微 零件 项目二:动车模型智 工 加工 慧加工(6学时)
厂
生 产
产品 装配
项目三:动车模型智 慧装配(10学时)
实
践
成品 入库
项目四:动车模型智 慧仓储(6学时)
课
参赛内容:动车模型智慧生产(16学时)
任务一:动车模型转向架设计制作(4学时) 任务二:动车模型底座数控加工(2学时) 任务一:动车模型底板的AGV转运(4学时) 任务二:动车模型PCB板紧固控制 (2学时) 任务三:动车模型工业机器人装配(4学时)
教学整体设计
赛
全国职业院校技能大赛“机器人系统集成应用技术” MES系统应用、PLC技术应用、工业机器人技术应用、
RFID技术、数控加工技术
安徽省工业机器人技术应用技能大赛暨第二届全国工业机器人技术应用技能大赛选拔赛技术方案
-2-
(三)参赛对象 1.职工组:具有工业机器人技术应用相关工作经历的在职人 员(含职业院校老师)。 2.学生组:省内职业和技工院校全日制在籍学生。 (四)报名条件 1.思想品德优秀; 2.具备较高的工业机器人技术应用技能水平; 3.学习能力较强,身体素质好; 4.具备较好的心理素质和较强的应变能力; (五)成绩计算 理论知识竞赛满分为 100 分,按 20%的比例折算计入竞赛总 成绩。试题均为客观题,采用机考方式实现。 实际操作竞赛满分为 100 分,按 80%的比例折算计入竞赛总 成绩。 折算后的理论知识竞赛成绩与实际操作竞赛成绩相加得出 参赛选手竞赛总成绩,满分为 100 分。 四、大赛命题原则
按照计算机程序设计员国家职业标准(国家职业资格标准三 级/高级工)要求,在工业机器人的集成应用等基本技能考核的 基础上重点突出企业所需专业技能及新技术应用,体现制造技术 与生产实际相结合的原则,突出职业能力考核及工匠精神要求。 五、大赛范围、试题类型和其他
(一)理论知识竞赛 1.以工业机器人技术应用知识为主,机电一体化、工业自动 化、电气自动化相关知识为辅。 (1)工业机器人技术
根据任务书给定的转运及码垛任务,选手进行任务分析,编
-5-
写动作流程,对六轴工业机器人进行参数设定、程序编写(计算 机离线编程或示教编程、基于 CAD 数据的曲线轨迹设计、曲线轨 迹优化)、搬运及码垛任务操作调试等。
(3)视觉技术应用 根据任务书给定的视觉应用任务,选手进行任务分析,进行 视觉检测、识别等相关应用。 (4)工作效率考核 根据任务书要求完成的任务进行工作效率的提升。 (5)工作质量考核 根据任务书要求完成的工作任务要提高工作质量。 2.比赛时间 实操比赛时间为 4 小时。 3.命题方式 专家命题。 六、大赛选手自带设备明细、大赛场地与设施
中华人民共和国第二届职业技能大赛焊接机器人技术

中华人民共和国第二届职业技能大赛焊接机器人技术1. 赛事背景中华人民共和国第二届职业技能大赛焊接机器人技术是一项由国家人力资源和社会保障部、工业和信息化部和教育部联合主办的国家级赛事。
该赛事旨在促进我国职业教育和技能培训的发展,加强职业技能人才的培养和交流,提升我国在焊接机器人技术领域的国际竞争力。
2. 参赛范围本届赛事的参赛范围涵盖了全国各地的职业院校、技工学校以及相关企业的焊接机器人技术专业学生和职业技能人才。
参赛选手需具备扎实的焊接理论知识和丰富的实战经验,能够熟练操作焊接机器人完成各类焊接任务。
3. 赛事内容赛事包括技能操作竞赛和理论知识考核两个环节。
技能操作竞赛要求选手在规定时间内,根据实际工件进行焊接操作,考察其对焊接机器人的操作技能和焊接质量。
理论知识考核则针对焊接机器人的工艺控制、焊接材料和设备知识等方面进行考查,旨在评估选手的焊接理论水平和综合素质。
4. 赛事意义本次赛事将有助于加强我国职业教育与产业需求的对接,提升职业技能人才的整体水平和实战能力。
通过与国际接轨的赛事组织和科学评价,将激励更多的学生和技能人才积极参与焊接机器人技术的学习和实践,推动我国焊接机器人技术的发展和创新。
5. 未来展望随着工业自动化水平的不断提升,焊接机器人技术必将成为制造业的重要发展方向。
中华人民共和国第二届职业技能大赛焊接机器人技术的举办,将为相关行业提供更多优秀的焊接技能人才,并为我国焊接机器人技术的进步和应用奠定坚实的基础。
期待未来的职业技能大赛能够涌现更多赛事优胜者,为我国制造业的可持续发展和国际竞争力的提升贡献力量。
6. 参赛选手培训和技术创新为了更好地培养焊接机器人技术的专业人才,并提高参赛选手赛前的技能水平,各地的职业院校和技工学校纷纷加强了相关课程的教学内容和实践环节。
针对焊接机器人技术的特点和发展趋势,学校还积极引进了先进的焊接机器人设备,并邀请具备丰富实践经验的专业技术人员担任指导老师,以确保选手们在赛场上能够游刃有余地应对各种焊接任务。
工业机器人应用操作技能大赛名称
工业机器人应用操作技能大赛名称1. 赛事介绍工业机器人应用操作技能大赛是一个旨在促进工业机器人应用技术发展的赛事,旨在提高参赛选手的操作技能和应用能力。
赛事包括多个环节,涵盖了机器人编程、自动化生产、工业应用等多个领域,旨在鼓励和推动工业机器人技术的发展和应用。
2. 赛事意义工业机器人应用操作技能大赛旨在为工业机器人操作者提供一个展示和提高自身技能的评台,促进工业机器人技术在生产制造领域的广泛应用。
通过比赛,可以激发参赛者的竞争意识,激发他们对工业机器人应用技术的学习和研究兴趣,增强他们的技能和应用能力,从而推动工业机器人技术的进步和发展。
3. 赛事内容工业机器人应用操作技能大赛的赛事内容涵盖了工业机器人应用技术的多个方面。
其中包括:- 机器人编程- 工业自动化应用- 工业生产线操作- 机器人故障排除- 工业机器人应用案例分析4. 赛事影响工业机器人应用操作技能大赛在工业机器人领域具有广泛的影响力。
赛事为工业机器人操作者提供了一个学习和交流的评台,使他们能够通过比赛相互学习,提高自身的技能水平。
赛事也为企业提供了一个展示和宣传的机会,可以通过赛事展示自己的技术实力和产品优势。
赛事也可以推动工业机器人技术的创新和发展,激发更多人对工业机器人应用技术的关注和研究。
5. 个人观点我认为工业机器人应用操作技能大赛对于促进工业机器人技术的发展和应用具有重要的意义。
通过这样的比赛评台,可以激发更多人对工业机器人技术的兴趣,促进技术的传播和应用。
比赛也可以为参赛选手提供一个学习和竞技的机会,有助于提高他们的技能水平。
希望通过这样的赛事,能够推动工业机器人技术的创新和发展,为工业生产制造领域的升级和转型提供有力支持。
总结工业机器人应用操作技能大赛是一个促进工业机器人技术发展和应用的重要评台,通过比赛可以提高参赛者的操作技能和应用能力,推动工业机器人技术的进步和发展。
希望通过这样的赛事能够激发更多人对工业机器人技术的关注和学习,为工业生产制造领域的升级和转型做出贡献。
第二届全国技能大赛赛项保障单位申报表、申报赛项一览表、赛项保障实施方案模板

新职业赛项
20项
口智能制造工程技术、口集成电路工程技术、口人工智能工程技术、口工业互联网工程技术、口虚拟现实工程技术、口互联网营销、口连锁经营管理、口供应链管理、口人工智能训练、口健康照护、口物联网安装调试、口工业机器人系统操作、口工业机器人系统运维、口无人机装调检修、口建筑信息模型技术、口增材制造设备操作、口全媒体运营、口区块链应用操作、口服务机器人应用技术、口家政服务。
附件1
第二届全国技能大赛赛项保障单位申报表
申报单位基本信息
申报单位
单位注册地
主要负责人
所属部门
现任职务
赛项技术负责人
所属部门
现任职务
场地经理
所属部门
现任职务
场地经理助理
所属部门
现任职务
录分员
所属部门现ຫໍສະໝຸດ 职务解说员所属部门
现任职务
联系人
所属部门
现任职务
联系人座机
联系人手机
联系人邮箱
申报评定基础:【主要从申报单位保障团队组建;所属行业、规模、同业中的信誉及影响力; 承接过省部级及以上竞赛赛项保障服务或提供过赛项技术支持的业绩情况概述。《第二届全国技能大赛赛项保障实施方案》以附件形式提交】
2
结构与建筑技术
13项
口砌筑、口家具制作、口木工、口混凝土建筑、口电气装置、口精细木工、口园艺、口油漆与装饰、口抹灰与隔墙系统、口管道与制暖、口制冷与空调、口瓷砖贴面、口建筑信息建模。
3
制造与工程技术
21项
口数控铣、口数控车、口建筑金属构造、口电子技术、口工业控制、口工业机械、口制造团队挑战赛、口CAD机械设计、口机电一体化、口移动机器人、口塑料模具工程、口原型制作、口焊接、口水处理技术、口化学实验室技术、口增材制造、口工业设计技术、口工业4.0、口光电技术、口可再生能源、口机器人系统集成。
工业机器人技术应用大赛理论题试题C(带答案)
28.对机器人进行示教时, 作为示教人员必须事先接受过专门的培训才行. 与示教作业人员一起进行作业的监护人员, 处在机器人可动范围外时,(B )可进行共同作业。
A不需要事先接受过专门的培训
B必须事先接受过专门的培训
C没有事先接受过专门的培训也可以
D无所谓
29.对机器人进行示教时, 模式旋钮打到示教模式后, 在此模式中,外部设备发出的自动启动信号( A )。
A 机器人本体上 B 示教器上 C 控制柜上 D 需外接
49.机器人本体是工业机器人机械主体,是完成各种作业的(A )。
A执行机构B控制系统C传输系统D 搬运机构
50.传感器包括以下三个功能部件:敏感元件、传感元件、( D )元件。
A 辅助B控制C 执行D测量
二、多项选择题(共 20 题,每题 1.5 分,共 30 分)
A在感性负载上并联电容可以提高功率因数
B在感性负载上串联电容可以提高功率因数
C在阻性负载上并联电感可以提高功率因数
D在阻性负载上并联电容可以降低功率因数
11.变压器降压使用时,能输出较大的(B)。
A功率B电流C电能D电功
12.单稳态触发器的输出状态有(A)
A一个稳态、一个暂态B两个稳态C只有一个稳态D、没有稳态
A减小两板正对面积B增大两板的正对面积
C使两板靠近些D使两板分开些
8.如图所示,闭合导线框的质量可忽略不计,将它从图示位置匀速拉出匀强磁场,若第一次用0.3 s时间拉出,外力所做功为W1,通过导线横截面的电量为q1,第二次用0.9 s时间拉出,外力做功为W2,通过导线截面电量为q2,则(C)
A. B.
1.实际的直流电压源与直流电流源之间可以变换,变换时应注意 (BCD)
(最新整理)全国职业院校技能大赛机器人技术应用竞赛
(完整)全国职业院校技能大赛机器人技术应用竞赛编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)全国职业院校技能大赛机器人技术应用竞赛)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)全国职业院校技能大赛机器人技术应用竞赛的全部内容。
2018年全国职业院校技能大赛“机器人技术应用"竞赛杭州市选拨赛赛项规程一、赛项名称赛项名称:机器人技术应用英语翻译:Robot technique and application赛项组别:中职组赛项类别:加工制造类二、赛项目的“机器人技术应用”赛项以工业机器人为核心部件,融合了工具快换、可编程逻辑控制器、气动技术、传感器、智能视觉检测等先进应用技术,以工业机器人在计算机/通讯/消费类电子产品行业(3C行业)中最典型的异形芯片插件工序为应用背景,以机械及电气的装调、工业机器人的维护和基础操作以及3C行业中典型的涂胶、码垛、分拣、装配等工作任务为考核内容,考察学生在工业机器人系统的安装、调试、编程、团队协作、质量控制及安全意识等方面的专业能力和职业素养,以及学生在工业机器人应用技术方面的综合职业能力。
通过竞赛,检验和展示中职院校工业机器人等相关专业教学改革成果以及学生的通用技术与职业能力,引导和促进中职院校相关专业的人才培养模式、教学模式和考核评价模式改革,有力促进工业机器人操作、编程、系统调试以及现场维护等岗位技术技能型人才的培养,助推中职院校在工业机器人领域的人才培养能力.三、竞赛内容“机器人技术应用"赛项竞赛内容围绕工业机器人及其系统的安装维护、操作调试、编程应用等内容,主要考察选手机电通用设备的机械及电气安装调试能力、工业机器人本体的基础操作和编程调试能力、利用计算机辅助软件对特殊应用工艺的简化编程及仿真能力、工业机器人结合PLC、视觉检测的综合应用及系统联调能力,同时在实操过程中运用专业知识均衡功能实现、动作效率、成本控制的综合能力,强化选手的安全和环保意识。
深化产教融合_加强校企合作_打造技能人才培养高地——专访济宁市技师学院院长杨楠

深化产教融合 加强校企合作 打造技能人才培养高地——专访济宁市技师学院院长杨楠济宁市技师学院院长 杨楠我国于2022年11月正式印发了《中华人民共和国职业分类大典(2022年版)》,受到了社会各界的广泛关注。
不久前召开的中华人民共和国第二届职业技能大赛上增加了20个新职业和数字技术技能类赛项,如人工智能工程技术项目、健康照护项目、家政服务(整理收纳)项目等,成为本次大赛的最大亮点之一。
济宁市技师学院在本届大赛派出5名选手,分别参加了服务机器人应用技术、网站技术、人工智能训练、集成电路工程技术4个项目的比赛,获得1银2优胜的好成绩,其中新职业和数字技术技能类赛项的服务机器人应用技术项目获银牌、人工智能训练项目获优胜奖。
本期《职业》杂志“校长对话”栏目邀请济宁市技师学院院长杨楠,介绍该学院开展特色办学、专业建设、技能竞赛、人才培养、产教融合等方面经验,与读者分享。
济宁市技师学院(以下简称学院)创建于1958年,是国家级重点技工院校、国家级高技能人才培训基地、全国技工院校工学一体化建设院校、全国第一批示范性技工教育联盟(集团)建设院校和全国首批国家级技能根基工程培训基地,也是山东省首批7所技工教育优质院校建设单位之一。
现有全日制在校生1.3万人,年职业培训鉴定5万人次。
设有智能制造学院、信息工程学院、机电工程学院、交通运输学院等9个二级教学单位,开设涵盖济宁市新旧动能转换十强产业和支柱产业的专业40余个。
Q 我们了解到,今年是学院建校65周年,多年来,学院聚焦服务地方产业发展,不断深化改革创新,为社会培养了一大批符合产业发展需要的知识型、技能型、创新型技能人才,连续两年被山东省委、省政府表彰为“山东省人才工作表现突出单位”,荣获“国家技能人才培育突出贡献单位”称号,集团化办学经验在全国推广。
请问学院在集团化办学方面有哪些创新做法?A为着力破解就业结构性矛盾,精准服务新旧动能转换和产业转型升级发展,按照习近平总书记关于“大力发展技工教育”的指示精神,在济宁市委、市政府的正确领导和各级人社部门的大力支持下,2019年10月,由学院发起,首批联合129家企业、19所技工院校、3所职业培训机构,组建了山东省首家技工教育集团。
2023年全国行业职业技能竞赛计划安排

2023 年全国行业职业技能竞赛打算安排一、一类职业技能大赛〔10 项〕序号竞赛名称主办单位竞赛职业〔工种〕决赛时间工业和信息化部人力资源社会保障部工业机器人系统运维员全国工业和信息化1教育部计算机软件测试员10 月技术技能大赛中华全国总工会电子数据取证分析师共青团中心装配钳工〔智能制造单元安装与调试〕人力资源社会保障部电工〔智能制造单元生产与管控〕第四届全国智能制造2中华全国总工会仪器仪表制造工〔仪器仪表与智能传感应用技术〕9 月应用技术技能大赛中国机械工业联合会模具工〔周密模具智能制造系统应用技术〕物联网安装调试员〔智能制造数字技术应用〕计算机及外部设备装配调试员〔智能传感器应用技术〕其次届全国人工智能人力资源社会保障部计算机程序设计员〔工业机器人人工智能技术应用〕3 11 月应用技术技能大赛中国机械工业联合会人工智能训练师〔效劳机器人人工智能技术应用〕无人机装调检修工〔飞行器人工智能技术应用〕首饰设计师全国工业设计4职业技能大赛第十三届全国交通运输人力资源社会保障部中国轻工业联合会交通运输部人力资源社会保障部家具设计师陶瓷产品设计师鞋类设计师无损检测员〔逆向设计与三维检测〕大路养护工流体装卸工11 月5 11 月行业职业技能大赛中华全国总工会共青团中心机动车驾驶教练员大路收费及监控员城市轨道交通列车司机第四届全国农业行业6职业技能大赛农业农村部人力资源社会保障部中华全国总工会农机驾驶员水生物病害防治员橡胶割胶工灭火战斗员10月应急治理部应急救援员全国消防行业人力资源社会保障部搜救犬训导员7 11 月职业技能大赛中华全国总工会共青团中心消防装备维护员消防设施操作员消防通信员无损检测员焊工8“匠心杯”装备修理职业技能大赛中心军委装备进展部人力资源社会保障部电子专用设备装调工数控车工7 月工业机器人系统操作员增材制造设备操作员中华全国总工会钳工人力资源社会保障部焊工9第七届全国职工职业技能大赛工业和信息化部科学技术部数控机床装调修理工网络与信息安全治理员10 月公安部砌筑工住房和城乡建设部工业机器人操作调整工工业机器人系统操作员计算机程序设计员〔云计算平台与运维〕第十七届“振兴杯”共青团中心铣工10 12 月全国青年职业技能大赛人力资源社会保障部车工修理电工建筑信息模型技术员二、二类职业技能大赛〔77 项〕序号竞赛名称主办单位竞赛职业〔工种〕决赛时间水利部人事司第九届全国水利行业1中国就业培训技术指导中心河道修防工11 月职业技能竞赛中国农业水利气象工会全国委员会第三届全国邮政行业国家邮政局人事司2快递员11 月职业技能竞赛中国就业培训技术指导中心中国国防邮电工会全国委员会第十六届全国气象行业3职业技能竞赛第五届全国体育行业4职业技能竞赛其次届全国电子通信行业职业技能竞5赛中国气象局预报与网络司中国就业培训技术指导中心中国农林水利气象工会全国委员会国家体育总局人力资源开发中心〔职业技能鉴定指导中心〕中国就业培训技术指导中心工业和信息化部教育与考试中心中国就业培训技术指导中心天气预报12 月社会体育指导员10 月信息通信网络运行治理员〔数字孪生〕12 月全国珠宝首饰设计制作6职业技能竞赛自然资源部珠宝玉石首饰治理中心中国就业培训技术指导中心自然资源部职业技能鉴定指导中心贵金属首饰与宝玉石检测员贵金属首饰制作工〔起版〕11月7 全国残疾人岗位精英中国残疾人联合会就业效劳指导中心无人机测绘操控员11 月职业技能竞赛中国就业培训技术指导中心网络与信息安全治理员宠物安康护理员中国民航行业8职业技能竞赛中国民用航空局人事科教司中国民用航空局机场司中国就业培训技术指导中心中国民航工会全国委员会共青团全国民航委员会自然资源部职业技能鉴定中心机场运行指挥员航空气象员航空油料员网络与信息安全治理员11 月第七届全国测绘地理信息行业职业技9能竞赛中国就业培训技术指导中心中国能源化学地质工会全国委员会共青团中心青年进展部中华全国妇女联合会妇女进展部地图绘制员10 月10全国商业行业职业技能竞赛中国商业联合会洗衣师11 月中国就业培训技术指导中心皮革护理员中国财贸轻纺烟草工会全国委员会全国工业经济应用创11职业技能竞赛中国工业经济联合会中国就业培训技术指导中心供给链治理师(智能供给链治理)人工智能训练师(数据智能的标注分析与应用)11月中国煤炭工业协会12全国煤炭行业职业技能竞赛中国就业培训技术指导中心中国能源化学地质工会全国委员会电工〔综采修理电工)安全防范系统安装维护员9 月矿山抢救工井下作业工全国食品工业行业13职业技能竞赛中国食品工业协会中国就业培训技术指导中心调味品品评师10 月中国纺织工业联合会14 全国纺织行业职业技能竞赛中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会服装制版师9 月缝纫工第十三届全国石油和化工行业职业技15能竞赛和化学工业联合会中国就业培训技术指导中心中国能源化学地质工会全国委员会工业废水处理工化工总控工10 月16 全国建材行业职业技能竞赛第十届全国黄金行业17职业技能竞赛第十九届全国机械行业18职业技能竞赛中国建筑材料联合会中国就业培训技术指导中心中国黄金协会中国就业培训技术指导中心中国机械冶金建材工会全国委员会中国机械工业联合会中国就业培训技术指导中心中国机械冶金建材工会全国委员会水泥熟料煅烧工建材化学分析工涂裱工矿石处理工机修钳工贵金属首饰制作工〔3D 建模方向〕黄金投资专业人员〔现货方向〕电线电缆制造工〔检验工〕多工序数控机床操作调整工机床装调修理工(高档数控机床)12 月11月12月模具工19全国地质勘查行业中国矿业联合会中国就业培训技术指导中心地质试验员10 月职业技能竞赛自然资源部人力资源开发中心20全国安康治理行业中国医药教育协会安康治理师11 月职业技能竞赛中国就业培训技术指导中心21全国安康照护行业中国争论型医院学会安康照护师9 月职业技能竞赛中国就业培训技术指导中心22全国园林绿化职业技能竞赛中国风景园林学会中国就业培训技术指导中心园林植保工花卉园艺工11 月23其次届全国物流效劳师中国国际货运代理协会物流效劳师10 月职业技能竞赛中国就业培训技术指导中心24全国核能系统职业技能竞赛中国核能行业协会核设备无损检测工10 月中国就业培训技术指导中心核反响堆运行值班员机修钳工〔核电厂水泵检修〕核反响堆核级机械设备检修工〔核燃料操作〕装配式建筑施工员第四届全国装配式建筑25职业技能竞赛第十五届全国工程建设系统职业技能26竞赛全国化工石油建设行业27职业技能竞赛中国建设教育协会中国就业培训技术指导中心中国工程建设焊接协会中国就业培训技术指导中心中国化工施工企业协会中国就业培训技术指导中心建筑信息模型技术员(建筑领域)工程测量员装饰装修工焊工无损检测员〔金属构造〕增材制造〔3D 打印〕设备操作员(金属)电气设备安装员无损检测员〔石油化工管道〕11 月11 月10 月“中国铝业杯”第十四届全国有色金28 中国有色金属工业协会氧化铝制取工11 月属行业职业技能竞赛中国就业培训技术指导中心中国机械冶金建材工会全国委员会铝电解工仪器仪表修理工其次届全国电梯行业29职业技能竞赛中国电梯协会中国就业培训技术指导中心中国机械冶金建材工会全国委员会电梯安装修理工9 月其次届全国设备点检治理职业技能竞30赛全国特种设备检验检测行业职业技能31竞赛冶金工业职业技能鉴定指导中心中国就业培训技术指导中心中国设备治理协会中国特种设备检验协会中国就业培训技术指导中心中国锅炉与锅炉水处理协会机械设备点检员工业机器人系统运维员〔机器人系统故障分析与诊断〕无损检测员(承压设备)化学检验员11 月10 月全国冶金建设行业32职业技能竞赛中国冶金建设协会中国就业培训技术指导中心电工建筑信息模型技术员(工厂领域)10月中国钢构造协会冲压工〔冷作钣金工〕33全国钢构造职业技能竞赛11 月中国就业培训技术指导中心焊接设备操作工中国烹饪协会中式烹调师34全国餐饮行业职业技能竞赛中国就业培训技术指导中心中式面点师9 月中国财贸轻纺烟草工会全国委员会西式烹调师猪屠宰加工工第六届全国肉类行业中国肉类协会35牛羊屠宰加工工9 月职业技能竞赛中国就业培训技术指导中心禽屠宰加工工中国茶叶学会第五届全国茶叶茶艺师36中国就业培训技术指导中心9 月职业技能竞赛茶叶加工工农业农村部人力资源开发中心37其次届全国插花花艺行业职业技能竞中国插花花艺协会花艺环境设计师10 月赛中国就业培训技术指导中心国家花卉工程技术争论中心其次届全国连锁经营行业职业技能竞38赛第三届全国电子信息效劳业职业技能39竞赛其次届全国信息产业技术职业技能40竞赛全国电信和互联网行业中国连锁经营协会中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国电子商会中国就业培训技术指导中心中国国防邮电工会全国委员会中国电子劳动学会中国就业培训技术指导中心中国国防邮电工会全国委员会中国通信企业协会连锁经营治理师数字化治理师互联网营销师增材制造〔3D 打印〕设备操作员全媒体运营师物联网安装调试员电子商务师计算机程序设计员〔Python 编程〕质检员〔装备制造智能检测〕计算机修理工〔智能电子产品检测修理与数据恢复〕通信网络安全治理员11月12月10月41 12 月职业技能竞赛中国就业培训技术指导中心大数据分析师计算机程序设计员〔5G+MR 资源开发〕全国电子信息行业技术应用职业技42能竞赛全国通信网络建设与维护职业技能竞43赛全国电子有用技术44职业技能竞赛第七届全国陶瓷行业45职业技能竞赛中国电子质量治理协会中国就业培训技术指导中心中国互联网协会中国就业培训技术指导中心中国电子节能技术协会中国就业培训技术指导中心中国轻工业联合会中国陶瓷工业协会中国就业培训技术指导中心动画制作员〔VR 技术应用〕信息通信网络运行治理员〔物联网技术应用〕网络与信息安全治理员〔信息安全与数据恢复方向〕信息通信网络机务员信息通信网络线务员信息通信网络运行治理员计算机程序设计员〔混合式移动 APP 开发〕信息通信信息化系统治理员〔工业互联网技术〕电光源制造工陶瓷雕塑工陶瓷手工成型工陶瓷贴花工11月10 月10月11月中国财贸轻纺烟草工会全国委员会中国轻工业联合会第四届全国葡萄酒品酒中国酒业协会46品酒师11 月职业技能竞赛中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会全国工艺美术中国工艺美术协会47工艺品雕刻工〔根雕〕11 月职业技能竞赛中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会全国缝制机械修理48职业技能竞赛中国轻工业联合会中国缝制机械协会中国就业培训技术指导中心缝制机械装配调试工9 月49 全国珠宝玉石检测制作中国轻工业联合会宝石琢磨工11 月职业技能竞赛中国轻工珠宝首饰中心中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会工艺品雕刻工〔玉石雕〕景泰蓝制作工第三届全国皮具设计师50职业技能竞赛中国皮革协会中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会皮具设计师10 月第五届全国家具51职业技能竞赛其次届全国机械手表修理工职业技能52竞赛中国家具协会中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会中国钟表协会木雕工11 月钟表修理工12 月中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会第五届全国验光与配镜53职业技能竞赛其次十二届全国焙烤54职业技能竞赛中国眼镜协会中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业职业技能鉴定指导中心中国轻工业联合会中国焙烤食品糖制品工业协会中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会眼镜验光员眼镜定配工中式糕点制作工面包制作工西式糕点制作工12 月10 月其次届全国礼仪休闲行业职业技能竞55赛中国轻工业联合会中国礼仪休闲用品工业协会包装设计师11 月中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会中国轻工业联合会全国室内装饰设计中国室内装饰协会56 室内装饰设计师12 月职业技能竞赛中国就业培训技术指导中心中国财贸轻纺烟草工会全国委员会其次届全国美发美容行业职业技能竞57赛全国智能楼宇及空调58职业技能竞赛中国美发美容协会中国就业培训技术指导中心中国商业联合会中国财贸轻纺烟草工会全国委员会中国制冷空调工业协会中国就业培训技术指导中心中国乡镇企业协会美容师美发师美甲师制冷工智能楼宇治理员计算机程序设计员〔建筑 3D 可视化〕10 月12 月信息通信网络运行治理员〔数字通信网络建设〕59全国轨道交通安全应急中国地方铁路协会中国就业培训技术指导中心铁路线桥工城市轨道交通线路工10 月职业技能竞赛中国应急治理学会城市轨道交通信号工60全国汽车流通行业职业技能竞赛中国汽车流通协会中国就业培训技术指导中心营销师〔汽车营销〕仓储治理员10 月61第十三届全国电力行业中国电力企业联合会中国就业培训技术指导中心风力发电运维值班员11 月职业技能竞赛中国能源化学地质工会变配电运行值班员62全国建材机械工业中国建材机械工业协会焊接设备操作工〔焊接机器人编程、操作与维护〕11 月职业技能竞赛中国就业培训技术指导中心第十九届全国烟草行业中国烟草总公司63职业技能竞赛中国就业培训技术指导中心烟草制品购销员7 月中国财贸轻纺烟草工会全国委员会第四届中粮集团职业技能竞64赛中国贮存粮治理集团职业技65能竞赛中国船舶集团中粮集团中国就业培训技术指导中心中国贮存粮治理集团中国就业培训技术指导中心中国船舶集团乳品评鉴师9 月品酒师〔白酒〕〔粮油〕仓储治理员9 月农产品食品检验员船舶电焊工66 10 月职业技能竞赛中国就业培训技术指导中心数控车工中国航空发动机集团第三届67职业技能竞赛第三届全国油气开发专业职业技能竞68赛中国航空发动机集团中国就业培训技术指导中心中国国防邮电工会全国委员会共青团中心青年进展部自然气集团中国就业培训技术指导中心加工中心操作调整工航空发动机试验制造设备调试工航空发动机装配修理钳工自然气净化操作工电工10 月7 月聚丙烯装置操作工化工集团职业技能69竞赛化工集团中国就业培训技术指导中心井下作业员加氢裂化〔处理〕装置操作工聚乙烯装置操作工石油开采工10 月中国海洋石油集团职业技能70竞赛中国航天科技集团第十一届71职业技能竞赛中国航天科工集团第九届职72业技能竞赛中国海洋石油集团中国就业培训技术指导中心中国航天科技集团人力资源部中国就业培训技术指导中心中国航天科工集团中国就业培训技术指导中心起重工装卸机械操作工电工加工中心操作调整工钳工无线电装接工加工中心操作调整工电机嵌线工10 月10 月8 月无线电装接工焊工中国铁建股份中国铁建股份工程测量员73 11 月职业技能竞赛中国就业培训技术指导中心中国中车集团无人机驾驶员电工74中国中车第四届职业技能竞赛9 月中国就业培训技术指导中心焊工〔铝合金〕75中交集团第五届职业技能竞赛中国交通建设集团中国就业培训技术指导中心试验员起重工建筑信息模型技术员12 月中国航空工业集团第七届职76业技能竞赛中国航空工业集团中国就业培训技术指导中心中国国防邮电工会全国委员会飞机钣金工数控铣工9 月质检员飞机电缆工中国中铁股份中国中铁股份工程测量员77 7 月第四届职业技能竞赛中国就业培训技术指导中心试验员。
2019年全国职业院校技能大赛工业机器人技术应用赛项(高职组)评分表
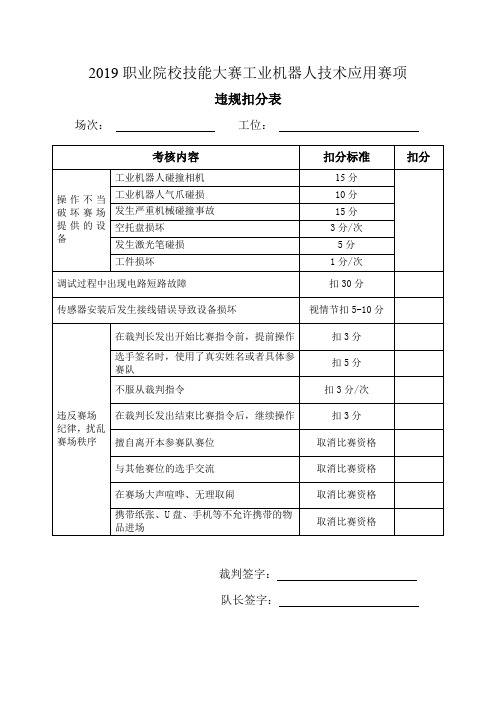
违规扣分表
场次:工位:
考核内容
扣分标准
扣分
操作不当破坏赛场提供的设备
工业机器人碰撞相机
15分
工业机器人气爪碰损
10分
发生严重机械碰撞事故
15分
空托盘损坏
3分/次
发生激光笔碰损
5分
工ห้องสมุดไป่ตู้损坏
1分/次
调试过程中出现电路短路故障
扣30分
传感器安装后发生接线错误导致设备损坏
取消比赛资格
裁判签字:
队长签字:
视情节扣5-10分
违反赛场纪律,扰乱赛场秩序
在裁判长发出开始比赛指令前,提前操作
扣3分
选手签名时,使用了真实姓名或者具体参赛队
扣5分
不服从裁判指令
扣3分/次
在裁判长发出结束比赛指令后,继续操作
扣3分
擅自离开本参赛队赛位
取消比赛资格
与其他赛位的选手交流
取消比赛资格
在赛场大声喧哗、无理取闹
取消比赛资格
携带纸张、U盘、手机等不允许携带的物品进场
工业机器人技术及应用教学资源介绍

工业机器人技术及应用教学资源介绍教学资源介绍各位专家、评委老师好:我是安徽合肥技师学院的陈克宗老师,是《工业机器人技术及应用》应用技术精品课程建设的负责人,现我就本专业的教学资源汇报如下:“机电技术应用”专业开设已有30年,现本专业在校生400人,《工业机器人技术及应用》是工业机器人专业六大核心课程之一。
《工业机器人技术及应用》是机电技术应用类技能培养的重要环节。
师资配备机电工程系现有在职教师18人(其中具有高级职称的4人),研究生和在读研究生5人,外聘教师2人、实习技师6人,聘请指导专业建设的企业家、教育专家10多位,先简单介绍一些在职教师情况:1、田寿恒高级讲师。
1986年毕业于安徽大学电气化专业,工学专业硕士,从事工科教学多年,教学管理经验丰富。
培训学生情况:田寿恒:指导比赛获奖情况:1、20XX年肖剑平等五人包揽合肥市第一届技校计算机竞赛前五名2、20XX年合肥市第二届技校计算机竞赛前三名3、20XX年1年陈克宗等三人合肥市技工院校技能竞赛第二、三名4、20XX年1年陈克宗获安徽省技工院校第二名5、20XX年4年刘灿等三人分获合肥市中职学校技能竞赛一、三等奖6、20XX年孙昌武等分获合肥市中职学校师生技能大赛二、三等奖7、20XX年赵乐孙大网等分获合肥市中职学校师生技能大赛二等奖参与比赛获奖情况:合肥市技工院校教师教学竞赛第二名1、20XX年全国骨干教师说课比赛二等奖2、20XX年第九届全国技工院校教学教研技术开发优秀成果评比三等奖编制教材及教研成果1、国家级精品课,机电技术应用专业《可编程控制器》子课题第四、第十、第十一部分(课题编号:*****X年04)2、《门式起重机电气控制线路实训考核装置》,获国家级教学教研技术开发三等奖。
自编教材的展示2、陈克宗技师,本科学历,二级实习指导教师。
获奖情况:1、20XX年合肥市劳动局优秀实习指导教师2、20XX年安徽省劳动厅优秀实习指导教师3、20XX年合肥市总工会合肥市技术能手、合肥市技术标兵4、20XX年合肥市劳动局合肥市技术能手5、20XX年学校机电类首席教师6、20XX年合肥市优秀共产党员7、20XX年安徽省青年岗位能手8、20XX年合肥市陈克宗工业机器人技能大师室9、20XX年安徽省陈克宗工业机器人名师工作坊10、20XX年安徽省技术能手11、20XX年安徽省陈克宗工业机器人技能大师工作室编制教材及教研成果1、国家级数字化精品课资源机电技术应用专业《可编程控制器》子课题第四、第十、第十一部分(课题编号:*****X年04);2、自动化车床的设计与改造,获国家级科研展三等奖自编教材的展示3、刘晓翠技师,本科学历,二级实习指导教师。
2021全国院校技能大赛赛项规程工业机器人技术应用赛项规程
全国职业院校技能大赛赛项规程一、赛项名称赛项编号:GZ-2021021赛项名称:工业机器人技术应用英文名称:Industrial Robot Technologies Application赛项组别:高职组赛项归属产业:装备制造类二、竞赛目的通过竞赛,检验、展示高职院校本专业教学改革成果以及学生岗位通用技术与职业能力,引领和促进高职院校该专业教学改革,激发和调动行业、企业关注和参与专业教学改革的主动性和积极性,推动提升高职院校应用专业人才培养水平。
赛项以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,面向全国高等职业院校工业机器人技术、机电一体化技术和电气自动化技术等专业,通过技能竞赛促进高等职业院校工业机器人技术应用相关专业的发展、课程的建设、人才的培养质量,积累和开发适合院校的生产性教学载体(项目),引入企业评价标准,解决工业机器人产业迅猛增长与专业人才严重短缺的矛盾,提升工业机器人系统技术应用人才水平和数量,实现人才的到岗即用。
赛项引导高等职业院校关注“工业机器人技术应用”方面的发展趋势及新技术的应用,促进和引导工业机器人相关专业建设;促进工学结合人才培养模式和课程教学的改革与创新,展示学生工业机器人及系统应用的综合能力;提升高等职业院校教师的工业机器人技术应用水平,以赛促教,为工业机器人及系统在企业中的应用提供人才保障。
赛项设计依据工业机器人制造、系统集成和应用等企业岗位的迫切需求,结合高等职业教育人才培养定位,着重考核与培养学生的工业机器人操作、编程、工作站安装调试、系统集成以及现场维护等能力,考察参赛队组织管理、团队协作、工作效率、质量与成本控制及安全意识等职业素养,践行李克强总理在全国职教会上提出的“中国制造业大国向精密制造业强国的转变”的要求。
三、竞赛内容本赛项以工业机器人应用工作站系统作为竞赛平台,多名参赛选手协作完成工业机器人应用工作站系统中的配套设备机械电气系统的装调、工业机器人标定及示教器示教编程、通讯设置及操作编程、视觉系统编程调试、AGV机器人及码垛机器人的编程调试等基本工作任务,并通过对系统的人机界面开发及控制程序设计等完成工业机器人智能工作站系统的联机运行和特定制造流程等综合任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二届安徽省工业机器人技术应用技能大赛暨第三届全国工业机器人技术应用技能大赛全国选拔赛技术方案(学生组)
目录
一、大赛实际操作竞赛 (2)
二、大赛选手自带设备、大赛场地与设施 (4)
(一)选手自带设备 (4)
(二)大赛场地与设施 (4)
三、大赛硬件平台说明 (4)
四、计算机离线编程软件说明 (8)
一、大赛实际操作竞赛
实际操作竞赛以工业机器人系统应用的操作技能为主。
1、竞赛范围与内容
为全面考查参赛选手的职业综合素质和技术技能水平,实际技能操作竞赛包括工业机器人的典型应用、仪器仪表使用和安全文明生产三大部分,具体内容见表1。
表1竞赛范围与内容
实际操作部分由参赛选手按工作任务书的要求完成“多品种物料转运码垛智能工作站”的编程调试及优化,具体包含以下工作任务:
(1)四轴工业机器人的编程与调试
根据任务书给定的搬运任务,选手进行任务分析,编写搬运动作流程,对四轴机器人进行参数设定、程序编写(计算机离线编程或示教编程)、搬运任务操作调试等。
(2)六轴工业机器人的编程与调试
根据任务书给定的转运及码垛任务,选手进行任务分析,编写动作流程,对六轴工业机器人进行参数设定、程序编写(计算机离线编程或示教编程、基于CAD数据的曲线轨迹设计、曲线轨迹优化)、搬运及码垛任务操作调试等。
(3)视觉技术应用
根据任务书给定的视觉应用任务,选手进行任务分析,进行视觉检测、识别等相关应用。
(4)工作效率考核
根据任务书要求完成的任务进行工作效率的提升。
(5)工作质量考核
根据任务书要求完成的工作任务要提高工作质量。
(6)机器人拆装、故障排除与修复
根据任务书要求完成机器人本体部分零部件及控制柜元器件的拆装、故障排除与修复。
2.比赛时间
实操比赛时间为6小时。
3.命题方式
专家命题。
二、大赛设施
(一)大赛平台
大赛平台(由大赛技术支持单位埃夫特智能装备股份有限公司提供的工业机器人技术应用实训系统),平台由实训台、料盘I、料盘II、四轴工业机器人搬运单元(含两套夹具)、环形装配检测机构、转盘机构、六轴工业机器人(由埃夫特智能装备股份有限公司提供)装配分拣单元(含三套夹具)、视觉检测装置、夹具库、成品库、绘图板及控制系统组成。
(二)评分方式
1、完全采用客观化评分,评分项内无主观分值;
2、借助故障检测盒对I/O接线及通讯设置进行测试;
3、按照客观的任务动作表现形式进行客观评分,无动作
表现者均不得分。
三、大赛硬件平台说明
大赛平台(由大赛技术支持单位埃夫特智能装备股份有限公司提供的工业机器人技术应用实训系统),平台由实训台、料盘I、料盘II、四轴工业机器人搬运单元(含两套夹具)、环形装配检测机构、转盘机构、六轴工业机器人(由埃夫特智能装备股份有限公司提供)装配分拣单元(含三套夹具)、视觉检测装置、夹具库、成品库、绘图板及控制系统组成。
1、四轴工业机器人搬运单元
采用四轴工业机器人,含两套夹具(双气手指夹具和双吸盘夹具),四轴工业机器人,基本参数如下:
2、料盘I
料盘I是生产线的开端,为零件提供放置平台,九宫格条理化设计,方便规划运动轨迹,提高工作效率。
3、料盘II
料盘II用于放置异形零部件。
4、环形装配检测机构
环形装配检测机构主要负责接收来自四轴工业机器人的零件,将零件运送到装配位置。
同时将物料牢牢夹紧,防止在装配过程中物料移动。
装配底座下面提供电源接口,用于检测装配质量。
5、转盘机构
转盘机构主要负责接收来自四轴工业机器人的异形零部件,将零部件运送到搬运位置,转盘机构上具有异形零部件固定装置,确保在转盘转动时,零部件相对位置不变。
6、六轴工业机器人装配分拣单元
采用六轴工业机器人,含三套夹具(双气手指夹具、双吸盘夹具和画笔夹具),六轴工业机器人基本参数如下:
7、视觉检测装置
视觉检测装置主要由安装支架、相机、摄像头、光源、控制器等组成。
视觉检测装置通过摄像头检测,完成视觉检测、识别等。
参数要求:彩色相机;300万像素;分辨率640*480;支持Modbus-TCP总线协议等;支持基本工具指令;具有手动拍照控制、实时视频监控等功能。
8、成品库
成品库主要由储料台、安装支架组成。
成品库用于盛放已装配完成的物料,根据颜色和质量进行分类存储。
9、绘图板
绘图板包含纸张固定装置,六轴工业机器人使用画笔夹具在纸面上绘图,绘制完成后保留绘制轨迹。
10、夹具库
用于存放画笔夹具和吸盘夹具。
11、安全装置
采用工业级安全光栅,配套相应的电气控制系统,当设备运行时,有物体进入后能够及时的停止动作。
12、控制系统
包含PLC、伺服控制器、HMI等,通信方式包含Modbus TCP和CanLink两种。
四、计算机离线编程软件说明
虚拟仿真实训系统包含部件装配、示教仿真、离线编程等功能模块(部件装配及示教仿真两模块功能本次大赛暂不开放),其中离线编程功能模块中包含四轴工业机器人离线编程和六轴工业机器人离线编程,如图4所示。
图4虚拟仿真实训系统首页
1、四轴工业机器人离线编程功能模块:该模块包含四轴工业机器人常用编程指令和标准分类指令,使用该软件可代替示教器快速进行编写四轴工业机器人程序,然后下载到机器人控制器中,如图5所示。
图5 四轴工业机器人离线编程界面
2、六轴工业机器人离线编程功能模块:该模块包含六轴工业机器人常用编程指令、标准分类指令,使用该软件可代替示教器快速进行编写六轴工业机器人程序,然后下载到机器人控制器中,如图6所示,同时该模块还包含离线轨迹编辑子模块,如图7所示,可以导入规定格式的图形文件,
并完成图形轨迹的离线规划,下载到机器人控制器中。
图6 六轴工业机器人离线编程界面
图7 轨迹编辑界面
(其他雷同部分请参考职工组内容,本次大赛技术方案由大赛组委会负责解释。
)
- 11 -。