纯电动客车整车总线通讯协议-仪表-0830-扬子江
扬子江客车“在线充”解决充电难题

扬子江客车“在线充”解决充电难题作者:暂无来源:《时代汽车》 2015年第5期本刊记者︱赵欢打出“新能源客车专家”旗号的东风扬子江汽车(武汉)有限责任公司(以下简称“东风扬子江”)以“在线充电”为纯电动客车充电难题提供了另外一个解决方案。
充电难题新解在武汉市区,有这样一批特殊的纯电动公交车,它们像无轨电车一样连接在天上的电车线进行充电,日续航里程可达150 公里以上,却有着更轻的车身重量和更为宽敞的内部空间。
这就是扬子江客车生产的“纯电动在线充城市客车”。
湖北省城市客车工程技术研究中心主任近日,记者在“2015 北京国际道路运输、城市公交车辆及零部件展览会”上,见到了东风扬子江总经理助理、湖北省城市客车工程技术研究中心主任雷洪钧博士。
雷洪钧向记者介绍了东风扬子江在线充电式纯电动公交巴士的“无污染、无阻碍、无顾虑”运营方案。
作为“在线充电”为纯电动客车的代表作,本次展会东风扬子江带来了这款城市客车。
雷洪钧告诉记者,本款客车在武汉市公交系统已经有200 台正常运行。
今年年初又新增100 台订单。
“在线充电解决了传统纯电动车面临的很多难题”,雷洪钧说。
通过发车前外部电捂热,解决传统纯电动车低温无法启动或者工作曲线差,充电放电差的问题;通过晚上慢充,白天补电的模式,解决了快速充电电池衰竭严重的难题(专家预计扬子江搭载的电池拥有15 年左右的使用寿命,当前质保8 年),2 年电池衰减仅有2%,相比之下,同期快充可使电池衰减30-40%;通过使用环节的节约,以8 年期的全生命周期计算,扬子江“在线充”客车比柴油客车便宜约20 万(扬子江在线充客车8 年使用成本205 万,同等传统柴油车226万);座位数增加;充电方便性大大提升,晚上380V 电源直充,离开了充电桩束缚;因为携带电池减少,节约了30% 左右的成本;利用碎片化的时间进行充补电,运营效率是充换电式纯电动公交车的2 倍。
记者了解到,扬子江客车今年前4 个月的销售形势不太好。
纯电动客车整车CAN通讯协议
0 to1500(0 to 15) 0 to16000(-8000 to 8000) 0 to36666(-5500 to 5500)
0 to250(-40 to 210) 0 to200(0 to 1)
0 to250(0 to 100) 0 to1000(0 to 100) 0 to2000(0 to 200) 0 to255(0 to 510) 0 to250(0 to 50)
0 8000 18333 40
0 0 0 0 0 0
2BYTE 2BYTE 2BYTE 1BYTE 1BYTE 1BYTE 2BYTE 2BYTE 1BYTE 1BYTE
3.5 整车系统控制网络 CAN 通讯机制
根据实验测得 CAN 总线在 250K 速率的通讯情况下,每帧报文的占用时间是 500uS。为了保证通讯的可靠性和稳定性,同时 考虑到控制的实时性,网络通讯周期定为 50mS,整车控制器初始化运行后,每隔 50mS 以广播方式发送数据给各部件,在一个周 期里只发送一次(在收到综合控制器数据后的 50mS 内);
实际电压 18~36V 范围内使用; 4)CAN 总线的通信电缆采用屏蔽双绞线(阻燃 0.5mm),屏蔽层应连接到 CAN_GND,屏蔽线的接地方式由整车布线时选择
合适位置单点接地; 5)网络的接线拓扑为一个尽量紧凑的线形结构以避免电缆反射。ECU 接入总线主干网的电缆要尽可能短。为使驻波最小化,
节点不能在网络上等间距接入,接入线也不能等长,且接入线的最大长度应小于 1m; 6)CAN 总线上各部件均有终端电阻(120Ω),同时,终端电阻同网络线之间通过跳线连接,以便灵活搭配,方便调试使用,
8
3.6 各系统 ECU 参数组定义
3.6.1 CANBus1 中各系统 ECU 参数组定义
电动的汽车整车控制器设计要求规范2018-10-15
目录1 整车控制器控制功能和原理 (1)2 纯电动客车总成分布式网络架构 (1)3 整车控制器开发流程 (3)3.1 整车及控制策略仿真 (4)3.2 整车软硬件开发 (5)3.2.1 整车控制器的硬件开发 (6)3.2.2 整车控制器的软件开发 (10)3.3 整车控制器的硬件在环测试 (12)3.4 整车控制器标定 (15)3.4.1 整车控制器的标定系统 (15)1整车控制器控制功能和原理纯电动客车是由多个子系统构成的系统,主要包括储能、驱动等动力系统,以及其它附件如空调等。
各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。
为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配。
因此,纯电动必须需要一个整车控制器来管理系统中的各个部件。
纯电动车辆以整车控制器为主节点的、基于高速CAN总线的分布式动力系统控制网络,通过该网络,整车控制器可以对纯电动车辆动力链的各个环节进行管理、协调和监控,提高整车能量利用效率,确保车辆安全性和可靠性。
整车控制器的功能如下:1)车辆驾驶:采集司机的驾驶需求,管理车辆动力。
2)网络管理:监控通信网络,信息调度,信息汇总,网关。
3)仪表的辅助驱动。
4)故障诊断处理:诊断传感器、执行器和系统其他部件故障并进行相应的故障处理,实时显示故障。
5)在线配置和维护:通过车载标准CAN端口,进行控制参数修改,匹配标定,功能配置,监控,基于标准接口的调试能力等。
6)能量管理:通过对纯电动客车载耗能系统(如空调、电动泵等)的协调和管理,以获得最佳的能量利用率。
7)功率分配:通过综合车辆信息、电池的SOC、温度、电压、电流和电机的温度等信息计算电机功率分配,进行有效的能量管理,以保证车辆能量效率达到最优。
8)坡道驻车辅助控制9)坡道起步时防溜车控制2纯电动客车动力总成分布式网络架构纯电动客车是由多个子系统构成的复杂系统。
宇电AIBUS通讯协议说明(V7[1].0)
![宇电AIBUS通讯协议说明(V7[1].0)](https://img.taocdn.com/s3/m/ddc115c9aaea998fcd220e0d.png)
宇电AIBUS通讯协议说明(V7[1].0)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(宇电AIBUS通讯协议说明(V7[1].0))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为宇电AIBUS通讯协议说明(V7[1].0)的全部内容。
AIBUS通讯协议说明(V7。
0)AIBUS是厦门宇电自动化科技有限公司为AI系列显示控制仪表开发的通讯协议,能用简单的指令实现强大的功能,并提供比其它常用协议(如MODBUS)更快的速率(相同波特率下快3—10倍),适合组建较大规模系统.AIBUS采用了16位的求和校正码,通讯可靠,支持4800、9600、19200等多种波特率,在19200波特率下,上位机访问一台AI—7/8系列高性能仪表的平均时间仅20mS,访问AI-5系列仪表的平均时间为50mS。
仪表允许在一个RS485通讯接口上连接多达80台仪表(为保证通讯可靠,仪表数量大于60台时需要加一个RS485中继器)。
AI系列仪表可以用PC、触摸屏及PLC作为上位机,其软件资源丰富,发展速度极快。
基与PC 的上位机软件广泛采用WINDOWS作为操作环境,不仅操作直观方便,而且功能强大。
最新的工业平板触摸屏式PC的应用,更为工业自动化带来新的界面。
这使得AIDCS系统价格大大低于传统DCS系统,而性能及可靠性也具备比传统DCS系统更优越的潜力,V7.X版本AI-7/8系列仪表允许连续写参数,写给定值或输出值,可利用上位机将仪表组成复杂调节系统.一、接口规格AI系列仪表使用异步串行通讯接口,接口电平符合RS232C或RS485标准中的规定。
纯电动汽车的总线概念
纯电动汽车的总线概念
总线是一种用于在不同系统和部件之间传输数据和信息的通信系统。
在纯电动汽车中,总线系统负责传输电池管理系统(BMS)、发动机控制、车载娱乐系统和车身控制系统等各种信号和数据。
总线系统的实现方式有两种:单总线和双总线。
单总线是指所有数据和信号都通过一个总线来传输,优点是连接简单、成本低廉,缺点是数据和信号互相干扰的可能性比较大。
双总线是指将数据和信号分成两个总线传输,一般会将重要的信号和数据放在双总线上,这样可以提高总线信号的稳定性和可靠性,减小干扰的可能性,但也会增加系统成本。
除了单总线和双总线外,还有CAN总线、LIN总线等不同的总线协议。
总的来说,总线系统的设计是纯电动汽车电气系统中非常重要的一个环节,对于提高电动汽车的整体性能和稳定性非常关键。
宇通新能源车通信协议
4.8 电池最高温度信息 ID:0x18F20AF3 .............................................................................- 15 -
4.9 电池最低温度信息 ID:0x18F20BF3 .............................................................................- 16 -
-6-
三:Can 网络节点地址分配
节点名称 BMS VCU MCU 仪表 绝缘检测仪 油泵变频器 DC/DC 气泵变频器 空调 触摸屏(17 寸液晶 屏) 远程终端
源地址(SA) F3 D0 F0 17 49 A0 A1 A2 A3 A4
F8
备注
-7-
四:电池管理系统协议
4.1 电池基本信息 ID:0x18F201F3
4.12 电池极柱温度信息 3 ID:0x18F212F3 .........................................................................- 18 -
4.13 电池极柱温度信息 4 ID:0x18F213F3 .........................................................................- 18 -
4.14 电池箱体在线状态 ID:0x185017F3 ............................................................................- 19 -
4.15 电池组基本信息 1(厂家容量) ID: 0x18F20CF3.....................................................- 20 -
快换式纯电动整车通讯协议

Torque实际转矩高字节(00)
字节3
控制器直流电压低字节
0.1v/bit
0
0 to 10000
(0 to 1000)
字节4
控制器直流电压高字节
字节5
电机控制器温度(高于75度时报警)
1℃/bit
-40
0 to 250
(-40to210)
字节6
电机温度(高于130度时报警)
1℃/bit
-40
3缩写代号
下列缩写代号适用于本文件:
VMS——Vehicle Management System整车控制器
BMS——Battery Management System电池管理系统
MCU——Motor Control Unit电机控制器
ICU——Instrumentation Control Unit仪表控制单元
电机故障字节1为123;
电池故障字节为0;
驱动模式为D或R;
充电插头没有连接;
DC/DC工作且在线且无三级故障;
油泵DC/AC工作且在线且无三级故障;
无低气压报警;
后舱门关
注:逻辑1表示事件为真;逻辑0表示事件为假;
报文名称:PVCU2波特率:250k
ID:0XCF106D0数据长度:8字节
周期:100ms发送节点:整车控制器
7bit
6bit
5bit
4bit
3bit
2bit
1bit(LSB)
车辆互锁功能启动
强制停车模式
强制低速模式
禁止自动换挡
(保留)
X4
X3
X2
X1
注:逻辑1表示事件为真;逻辑0表示事件为假;
X2X1=00 N;
新能源汽车不同类型的总线标注方法
新能源汽车不同类型的总线标注方法
新能源汽车中常用的总线类型主要包括LIN总线、CAN总线、FlexRay总线和MOST总线等,它们各自有不同的标注方法和应用场景。
具体如下:
1. LIN总线:LIN(Local Interconnect Network)是一种低成本的串行通信网络,通常用于汽车中的分布式电子系统控制。
它通常作为CAN总线的辅助功能使用,在不需要高带宽和多功能场合,如智能传感器和制动装置之间的通讯,使用LIN总线可以节省成本。
2. CAN总线:CAN(Controller Area Network)是一种能够实现分布式实时控制的串行通信网络。
由德国Bosch公司开发,广泛应用于汽车电子控制系统中。
CAN总线具有优秀的特性,能够在不同的ECU(电子控制单元)之间传递信息。
需要注意的是,不同速度类型的CAN总线设备不能直接连在同一路总线上,它们之间需要通过网关隔离。
3. FlexRay总线:FlexRay是一种为满足更高数据传输速率而设计的通信协议,它比CAN和LIN总线有更高的速度和确定性,通常用于实时性要求较高的应用,如动力控制系统和底盘控制。
4. MOST总线:MOST(Media Oriented Systems Transport)总线是一种多媒体定向系统传输技术,主要用于车载娱乐和信息系统的数据传输。
它可以传输音频、视频、数据和控制信号,具有较高的带宽和集成度。
纯电动车BMS与整车系统CAN通信协议

文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
项目四 新能源汽车总线通信网络系统检修(任务三 几何A CAN 总线系统故障诊断与分析)
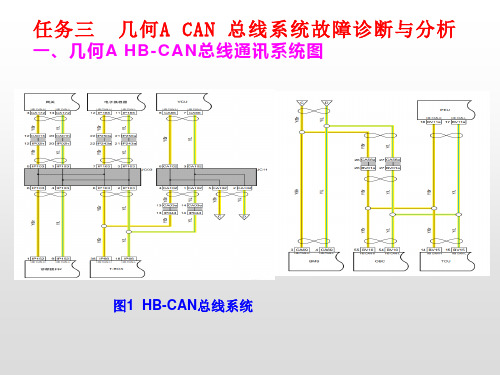
图13 电机控制系统故障代码
图14 整车控制系统
3.分析故障原因 由故障代码可知,整车控制系统(VCU)连接失败,分析整车控制电 路图(图15)可知,导致整车控制系统连接失败的故障原因有: (1)整车控制器供电问题。②整车控制器HB-CAN问题。③整车控制 器搭铁问题。
图15 整车控制器电路图
(2)故障检测
图2 HB-CAN正常工作时波形
正常canbus总线波形串形解码信号图,如图3所示。canH和canl波形相互 镜像,约为2.5v,峰峰值幅度为1v。l的波形从2.5v切换到1.5v,canh波形从 2.5v切换到3.5v。h和l在消息之间的时间段内保持2.5v。
图3 canH和canl波形图
其CAN-H对地电压如图4所示,为2.7V左右。CAN-L对地电压 如图5所示,为2.3V左右。
图9 整车控制器HB-CAN 对B+短路波形图
图10 CAN-H对地电压
图11 CAN-L对地电压
三、几何A CAN线故障案例
1.故障现象 按启动按钮,车辆无法启动,Ready灯不亮,车辆系统故障指示灯亮, 如图12所示。
图12 几何A 仪表显示
2.明确故障 打开汽车专用故障诊断仪,连接汽车OBD接口,进入吉利几何系列,读取电 机控制器IPU系统故障代码,显示故障代码U111487 与整车控制器通讯丢失, 如图13所示。同时解码仪无法进入整车控制系统,与车辆ECU通讯错误,如图 14显示。
图4 CAN-H对地电压
图5 CAN-L对地电压
(2)整车控制器VCU CAN-H断路 整车控制器HB-CAN中CAN-H断路后,其波形如图6所示。
图6 CAN-H断路后波形图
图7 CAN-H对地电压
扬子江纯电动公交车研发选题及技术路线研究

同时 ,人们认 识到 ,传统汽车 油 汽车。混合动力 电动车 除了装有
4 氓 I 2 0 - 6 妊 0 77
维普资讯
技 术 与 研 J, e
混合 动力客车节能 正常充 电时 间不能超 过 3 快速 充 术组合复杂度太 高。维护难度必须 客车节油大赛 “ h, 降低到公交公司 自身能掌控的水平 , 新技术产品”荣誉称 号。东风 电动 电要 缩 短 在 3 分 钟 之 内 ; 0 ຫໍສະໝຸດ 2纯 电动公交研发 的理 由
源效率 比理论值 低得 多 。t 合 电动 昆 汽车是传统 汽车 向纯 电动汽车过 渡
目前 ,全世界范 围内的电动汽 阶段的一种尝 试 ,其产 品形 态是短
价 日益走高 ,总体价格呈 持续上涨 车主要有 3 种方 案 ,即燃料 电池车 暂的 。 趋 势。 国汽车产业 的持续 发展 , 我 使 ( C 、混合动力车 ( V)和纯 2 3纯 电动汽 车 (V F V) HE . E )方案 国家能源面临严峻挑 战。 纯 电动车要解 决的 问题是将 无 电动 汽车 ( V) E 。
发方案 的优 势 以及技 术路 线的 重新 审视 ,并 为此提 出 了具体 的 改进措 施 和 办 法。 关键 词 :纯 电动公 交车 技 术路 线 车载 电源装置 示 范运 营
1 研发公交 电动客车的核心 问 发展 的极 型态 应该是 电动汽车 , 目 内燃机 以外 ,还 加装发 电机 、电池
占有 5 , 个 而我国 目前城市 中空气污 动 汽车 ,而是在 汽车上安 装 1 电 题 。 台 染源 5 0%来 自燃油 汽车 的废气 排 能 产生装置 。客车 的能量 需求量 相
一
放 ,汽车尾气所造成 的大 气污染 已 当大 , 不是纯 电动 自行 车和 电瓶车 补 充 ,具 体所 指 的 是 电池 质 量 及 品 经到了必须高度重视和解决的程度 。 可相 比的 。 车是公共 载客 的交通 质好坏 。纯 电动公交车对 电池质量 客 基 于以上2 个方面 的问题 , 我国 工 具 ,安全级 别也很 高 ,在动 负荷 及 品质好坏 的具体要求有4 方面 : 个 把汽车发展方 向和产 业调 整 已经提 为 1 0 k O 0 g数量级 下 ,在 其上 面安 ( )蓄 电池 比能量要高 ,一次 1 到 了主要议事 日程 ,在政 府倡导和 装 1 台电能生产 装置 ,同时必 须加 性充 电后的行驶里程要达 到城市公 支持下 ,人们从多 种途径 发明 了许 装 电能储设 备 , 从而导 致其有 效载 交运营 单位 的实际要求 ,至少要求 多节能 、环保 的新 交通 工具 ,试 图 荷 能力大 打折扣 。 这种 方案对 公交 天然气车 、 氢燃料车 、甲醇燃料车 、 全 性 。 混合 动力车及 电动车 等多种新能源 汽车纷纷涌现 。
纯电动车BMS与整车系统CAN通信协议
文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY—CAN-V1.00)版本记录版本制作者日期说明V1。
00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System,以下简称BMS)与电机控制器(Vehicle Control Unit,简称VCU)、智能充电机(Intelligent Charger Unit,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换.本标准的CAN标识符为29位,通信波特率为250kbps。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN)Part 1:Data Link Layer and Physical Signalling).SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议第11部分:物理层,250Kbps,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair)。
SAE J1939-21:2006商用车控制系统局域网络(CAN)通信协议第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
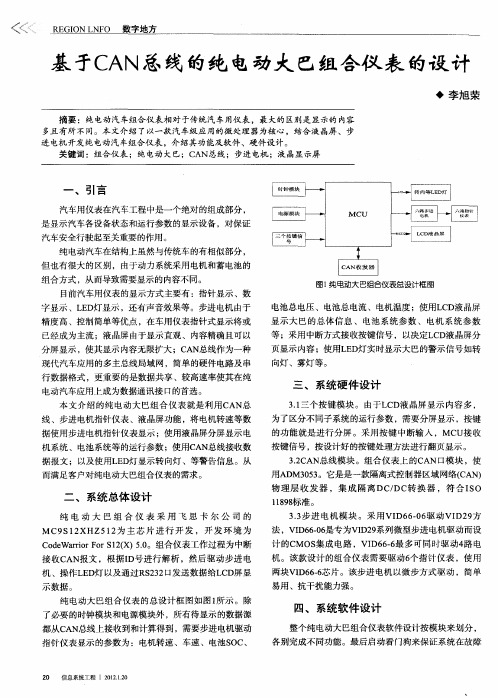
基于CAN总线的纯电动大巴组合仪表的设计
易用、抗干扰能力强 。
纯电动大 巴组合仪表 的总设计框 图如 图1 所示 。除 了必要 的时钟模块和电源模块外 ,所有待显示 的数据源
四 、系统软 件设 计
整个纯电动大 巴组合仪表软件设计按模块来划分 ,
各别完成不 同功能。最后启动看门狗来保证系统在故障
物理 层 收 发 器 ,集 成 隔离 DC DC转 换 器 ,符 合 I O / S
本文介 绍的纯 电动大 巴组 合仪表就是 利用C N总 A
线 、步进电机指针仪表、液晶屏功能 ,将 电机转速等数 据使用步进电机指针仪表显示 ;使用液 晶屏分屏显示 电 机系统 、电池 系统等的运行参数 ;使用C N A 总线接收数
显示 大 巴的总体信息 、电池 系统参数 、电机 系统参 数 等 ;采用中断方式接收按键信号 ,以决定L D 晶屏分 C 液
页显示 内容 ;使用L D E 灯实时显示大巴的警示信号如转 向灯 、雾灯等 。
分屏显示 ,使其显示 内容无限扩大 ;C N A 总线作为一种 现代汽车应用 的多主总线局域 网,简单 的硬件电路及 串
图1 纯电动大巴组合仪表总设计框图
目前汽车用仪表的显示方式主要有 :指针显示 、数
字显示 、L D E 灯显示 ,还有声音效果等 。步进 电机 由于 精度高 、控制简单等优点 ,在车用仪表指针式显示将或 已经成为主流 ;液晶屏 由于显示直观、内容精确且可 以 电池总电压 、电池总电流 、电机温度 ;使用L D液晶屏 C
据报文 ;以及使用L D E 灯显示转 向灯、等警告信息。从
而满足客户对纯电动大 巴组合仪表的需求 。
二 、 系统 总体 设计
纯电动乘用车CAN总线通讯协议v1.0
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
bms主控与从控通讯协议

bms主控与从控通讯协议BMS主控与从控通讯协议随着电动汽车的普及和发展,电动汽车的电池管理系统(Battery Management System,简称BMS)也变得越来越重要。
BMS主控与从控通讯协议是BMS系统中的关键部分,它负责主控与从控之间的数据传输和通信。
BMS主控与从控通讯协议的作用是确保主控和从控之间可以稳定、高效地交换信息。
主控是BMS系统的核心,负责对电池组的监测、管理和控制,而从控则是主控下属的一些辅助模块,用于采集电池组的状态参数和执行主控的指令。
主控与从控之间的通信协议必须能够满足高速、可靠、实时的要求,以确保BMS系统的正常工作。
在BMS系统中,主控和从控之间的通信可以通过有线或无线方式实现。
有线通信通常使用CAN(Controller Area Network)总线协议,这是一种广泛应用于汽车电子系统中的通信协议。
CAN总线协议具有高速、可靠、抗干扰等特点,非常适合用于BMS系统中主控与从控之间的通信。
通过CAN总线,主控可以向从控发送指令,并获取从控采集的电池组状态信息,如电压、电流、温度等。
除了有线通信外,BMS系统还可以采用无线通信方式进行主控与从控之间的数据传输。
常用的无线通信协议有蓝牙、Wi-Fi和Zigbee 等。
蓝牙通信适用于短距离通信,可以实现主控与从控之间的实时数据传输和控制。
Wi-Fi通信具有较大的覆盖范围,可以用于主控与从控之间的数据传输和远程监控。
Zigbee通信适用于低功耗、低速率的无线传感器网络,可以用于从控之间的数据采集和传输。
无论是有线通信还是无线通信,BMS主控与从控通讯协议必须具备以下特点:1. 实时性:BMS系统对电池组的监测和控制要求实时性高,通讯协议必须能够保证数据的及时传输和响应。
2. 可靠性:BMS系统对电池组的安全和可靠性要求较高,通讯协议必须具备数据校验和容错机制,以确保数据的准确性和完整性。
3. 灵活性:BMS系统的功能和性能可能会随着电动汽车的使用场景和需求而变化,通讯协议必须能够支持灵活的配置和扩展。
电动汽车充电机通信协议

目录宁波拜特发送给通讯板CAN1 (3)第一帧0001:宁波拜特发送给充电机 (3)第二帧0002:宁波拜特发送给充电机 (3)第三帧0003:宁波拜特发送给充电机 (4)第四帧0004:宁波拜特发送给充电机 (4)第五帧0005:宁波拜特发送给充电机 (4)第六帧0006:宁波拜特发送给充电机 (5)通讯板CAN1 发送给宁波拜特 (5)第一帧401充电机发送给宁波拜特 (5)第二帧402:充电机发送给宁波拜特 (5)第三帧403:充电机发送给宁波拜特 (6)第四帧404:充电机发送给宁波拜特 (6)第五帧405:充电机发送给宁波拜特 (7)主控板发送给通讯板CAN2 (7)第一帧18A0ABCC:APF侧主控板发送给通讯板 (7)第二帧:BiDCDC侧主控板发送给通讯板 (8)第三帧C0:APF侧主控板发送给通讯板 (8)第四帧:APF侧主控板发送给通讯板 (9)第五帧:BiDCDC侧主控板发送给通讯板 (9)通讯板发送给主控板CAN2 (10)第一帧C0: 通讯板发送给主控板CAN2 (10)第二帧C1: 通讯板发送给主控板CAN2 (11)第三帧C2:通讯板发送给主控板CAN2 (11)第四帧404:通讯板发送给主控板CAN2 (11)BiDCDC侧发送给APF侧 (13)第一帧C0: BiDCDC发送给APF侧CAN2 (13)第二帧:BiDCDC侧主控板发送给APF侧CAN2 (14)APF侧发送给BiDCDC侧 (15)第一帧C0: APF发送给BiDCDC侧CAN2 (15)第二帧: APF发送给BiDCDC侧CAN2 (15)3.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧 (16)3.1.1第一帧D1:充电桩对充电机的控制命令 (16)3.1.2第二帧D2:充电统计信息数据 (16)3.2、充电机A通迅板CAN1发往充电桩协议:共4帧 (17)3.2.1第一帧C1:充电机运行信息 (17)3.2.2第二帧C2:充电机交流输入信息 (18)3.2.3第三帧C3:充电机APF侧运行信息码与温度 (18)3.2.4第三帧C4:充电机BiDCDC侧运行信息码与温度 (19)3.3、充电机B通迅板CAN3发往上位机协议:共9帧 (20)3.3.1第一帧D1:充电机工作信息 (20)3.3.2第二帧D2:充电信息统计数据 (20)3.3.3第三帧C1:充电机状态信息 (21)3.3.4第四帧C2:充电机交流输入信息 (22)3.3.5第五帧C3:充电机APF侧工作信息码与温度 (22)3.3.6第六帧C4:充电机BiDCDC侧工作信息码与温度 (23)3.3.7第七帧E1:电动汽车电池组单体电压信息1 (23)3.3.8第八帧E2:电动汽车电池组单体电压信息2 (24)3.3.9第九帧E3:电动汽车电池组信息 (24)3.4、CAN以太网转换器发往充电机B通迅板CAN3协议: (25)3.4.1第一帧C1:监控系统对充电机的控制命令 (25)C1:通过CANB板的CAN1发送监控系统对充电机的控制命令 (26)宁波拜特发送给通讯板CAN1第一帧0001:宁波拜特发送给充电机第二帧0002:宁波拜特发送给充电机第三帧0003:宁波拜特发送给充电机第四帧0004:宁波拜特发送给充电机第五帧0005:宁波拜特发送给充电机第六帧0006:宁波拜特发送给充电机通讯板CAN1 发送给宁波拜特第一帧401充电机发送给宁波拜特第二帧402:充电机发送给宁波拜特第三帧403:充电机发送给宁波拜特第四帧404:充电机发送给宁波拜特第五帧405:充电机发送给宁波拜特主控板发送给通讯板CAN2第一帧18A0ABCC:APF侧主控板发送给通讯板第二帧:BiDCDC侧主控板发送给通讯板第三帧C0:APF侧主控板发送给通讯板第四帧:APF侧主控板发送给通讯板第五帧:BiDCDC侧主控板发送给通讯板通讯板发送给主控板CAN2第一帧C0: 通讯板发送给主控板CAN2第二帧C1: 通讯板发送给主控板CAN2第三帧C2:通讯板发送给主控板CAN2第四帧404:通讯板发送给主控板CAN2第五帧F1:通讯板发送给主控板CAN2【新增参数设置】第六帧F2:通讯板发送给主控板CAN2【新增参数设置】第七帧F3:通讯板发送给主控板CAN2【新增参数设置】BiDCDC侧发送给APF侧第一帧C0: BiDCDC发送给APF侧CAN2第二帧:BiDCDC侧主控板发送给APF侧CAN2APF侧发送给BiDCDC侧第一帧C0: APF发送给BiDCDC侧CAN2第二帧: APF发送给BiDCDC侧CAN23.1、充电桩CAN1发往充电机A通迅板CAN1:共2帧3.1.1第一帧D1:充电桩对充电机的控制命令3.1.2第二帧D2:充电统计信息数据3.2、充电机A通迅板CAN1发往充电桩协议:共4帧3.2.1第一帧C1:充电机运行信息3.2.2第二帧C2:充电机交流输入信息3.2.3第三帧C3:充电机APF侧运行信息码与温度3.2.4第三帧C4:充电机BiDCDC侧运行信息码与温度3.3、充电机B通迅板CAN3发往上位机协议:共9帧3.3.1第一帧D1:充电机工作信息3.3.2第二帧D2:充电信息统计数据BYTE1 起始时间_小时低字节充电起始时间为:时分秒高4小时。
BMS通讯协议中通轻客修改版V1.2

Signal Min. Value (phys) 0 0 0 -1000
Signal Max Value (phys) 15 1 800 1000
Invalid Value (hex) N/A N/A N/A N/A 1 1 1 1 0 0 0 -1000 Reso-lution Offset
Signal Unit
Data Type
Default Value (hex) 0 0 0 0X3E8
Signal Value Description (dec) 。
Receiving ECUs
N/A N/A V A
unsigned unsigned unsigned unsigned
BMS BMS BMS BMS
VCU
VCU_B MS_0
0x0CFF1501
8
Periodic
20
BMS_VCU 1 1 4 BMS_VCU_0_Heatb eat BMS_Md 心跳信号 15 1 N/A N/A 0:放电模式 1 5 1 运行模式 1 1 N/A 1:充电(充 电机)模式 0:正常 1 BMS_V CU-0 0x0CFF7D03 8 Periodic 20 2 3 4 6 7 1 1 1 9 17 25 41 49 1 5 6 8 8 16 8 16 4 1 1 6 3 65405 3 BMS_SOC BMS_CellHVoltNum BMS_CellHVolt BMS_CellLVoltNum BMS_CellLVolt BMS_VCU_1_Heatb eat BMS_PrechgSts BMS_HVConSts 电池组SOC 电池最高单 体电压编号 电池最高单 体电压 电池最低单 体电压编号 电池最低单 体电压 心跳信号 预充电状态 高压连接状 态 BMS自检状 态 电池SOH 电池组总电 压 电池组总电 流 电池最高温 度 电池最低温 度 充电线连接 状态 0 0 0 BMS_SysFltLvl 系统故障等 级 0 100 255 5 255 5 15 1 1 1:一级故障 4 N/A 0.5 1 0.001 1 0.001 N/A N/A N/A N/A N/A N/A 1 0 % N/A V N/A V N/A N/A N/A 0 0 0 N/A unsigned 0 2:二级故障 3:三级故障 4:四级故障 N/A 0 N/A 0 N/A 0 0:未完成 1:完成 0:高压断开 1:高压闭合 0:正在自检 0 0 0 -1000 -40 -40 3 100 800 1000 200 200 N/A N/A 1 1 1 1 1 N/A 1 0 -1000 -40 -40 N/A % V A ℃ ℃ unsigned 0 1 0 0x320 0x3C 0x3C 1:自检完成 2:自检失败 N/A N/A 充电为负 放电为正 N/A N/A 0:充电机未 0 1 N/A N/A N/A N/A unsigned 0 连接 1:连接 0:未充电 1 2 2 BMS_ChgSts 充电状态 总正接触器 状态 预充电接触 器状态 总负接触器 状态 充电机接触 器状态 电池加热系 统工作状态 电池冷却系 统工作状态 电池湿度状 态 最大可用持 续充电功率 (30min) 最大可用短 时充电功率 (30s) 最大可用持 续放电功率 (30min) 最大可用短 时放电功率 (30s) 正极绝缘阻 值 负极绝缘阻 0 0 2000 2000 N/A N/A 10 10 0 0 kΩ kΩ unsigned unsigned 0 0 N/A N/A 0 200 N/A 1 0 kW unsigned 0 N/A 0 200 N/A 1 0 kW unsigned 0 N/A -200 0 N/A 1 -200 kW unsigned 0XC8 N/A -200 0 N/A 1 -200 kW unsigned 0XC8 N/A 0 3 N/A N/A N/A N/A unsigned 0 1:正在充电 2:充电完成 1 1 1 1 4 5 6 7 1 1 1 1 BMS_PosRlySts BMS_PrechgRlySts BMS_NegRlySts BMS_ChgrRlySts 0 0 0 0 3 3 3 1 N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A unsigned unsigned unsigned unsigned 0 0 0 0 0:断开 1:闭合 0:断开 1:闭合 0:断开 1:闭合 0:断开 1:闭合 0:未工作 0 1 N/A N/A N/A N/A unsigned 0 1:工作 其他值保留 0:未工作 0 1 N/A N/A N/A N/A unsigned 0 1:工作 其他值保留 0 100 N/A 10 0 % unsigned 0 N/A VCU VCU VCU
电动汽车通讯协议
文件编号: TKC/JS(S)-EV33文件版本号: 0/A版安徽天康特种车辆装备有限公司纯电动专用车辆通讯协议(VER1.2)编制:审核:批准:发布日期:2014年12月22日实施日期:2014年12月22日安徽天康特种车辆装备有限公司整理范本编辑word!纯电动专用车辆通讯协议(VER1.2)协议参考SAE J1939,CAN2.0B,PEV-CANBUS20051114等。
终端电阻说明:组合仪表与BMS配终端电阻(120Ω),其它零部件不带终电阻。
总线通信速率:250KBPS1.网络拓扑结构说明电动汽车网络采用双CAN互连结构如下图。
蓄电池管理系统(BMS)采用三路CAN入网,车载充电机系统通过CAN2入网。
从板1从板2高压板诊断显示器C A N BM S主控SA=243(F3) =244(F4)电机控制器SA=208(EF)组合仪表SA=40(28)车载充电机SA=229(E5)C A N2地面充电机或充电站SA=230(E6)C A N1整理范本编辑word!2.网络信号数据格式定义电动客车网络信号数据格式遵守下表,双行定义遵循首行;电动汽车网络信号数据格式遵守下表,双行定义遵循第二行。
数据类型比例因子范围(实际量程) 偏移量字节数总电压0.1V/bit 0 to 10000(0 to 1000) 0 2BYTE总电流0.1A/bit 0to 65535(-3200 to 3353.5) -32000 2BYTE 单体电池电压0.01 V/bit 0to 65535(-320 to 335.35) 0 2BYTE容量(AH)2AH 0 to 255(0~510AH) 0 1BYTE 温度1℃/bit0 to 250(-40 to 210) -40 1BYTE 电池(SOC)0.4%/bit 0 to 250(0 to 100%)0 1BYTE生命信号1/bit 0~255 0 1BYTE 功率0.1kW/bit 0 to 10000(0-1000kW) 0 2BYTE3.数据链路层应遵循的原则数据链路层的规定主要参考CAN2.0B和J1939的相关规定。
扬子江发布纯电动在线充二代产品

扬子江发布纯电动在线充二代产品
佚名
【期刊名称】《人民公交》
【年(卷),期】2016(0)6
【摘要】定位中国新能源客车专家的扬子江汽车集团,用6年时间完成了新能源产品的全面布局,在纯电动公交客车领域实现重大突破,展会上隆重推出其在线充第二代产品。
纯电动在线充产品理念目前,纯电动客车发展虽然方兴未艾,但仍有许多技术瓶颈有待突破,例如:续驶里程不足、电池衰减、冷启动、成本过高等。
【总页数】1页(P109-109)
【正文语种】中文
【相关文献】
1.“在线充”的世园会之行扬子江在线充纯电动城市客车服务青岛世界园艺博览会
2.国内首创即充式纯电动车投放运行——扬子江即充式纯电动公交车在武汉电8路上线示范运营
3.国内首创即充式纯电动车投放运行——扬子江即充式纯电动公交车在武汉电8路上线示范运营
4.扬子江纯电动在线充技术报告赢得高度称赞
5.扬子江在线充纯电动客车项目顺利通过专家评审
因版权原因,仅展示原文概要,查看原文内容请购买。