030421l03-单轴伺服控制系统安装、调试与运行(3)
CSD3伺服调试的基本步骤

PC的COM1端口与CSD3通讯口CN3连接图CSD3伺服驱动器建议调试步骤:一:伺服连接及初始化1. 打开SmartJog2. 选择Servo Model.通常安装版Firmware的驱动器选择“CSD3 Plus Series”,如果驱动器安装了版的Firmware可实现内部定位功能(IPC), 请选择“CSD3 Plus Series Indexing”。
3.与伺服驱动器建立连接按下“Connect”键,PC与驱动器建立连接。
4.读取驱动器内参数(注:参数写入将改变伺服的运行状态,请慎重!)读取所有参数灰色表示没写入所有参数5.对伺服驱动器内的参数做复位, 还原为伺服驱动器的出厂设定参数。
注:CSD3驱动器在升级Firmware后,电机参数可能不正确,请手动设置电机参数(Pr_001)后再进行参数复位。
参数复位按钮。
二:伺服参数设定及自动整定伺服驱动器与电机线路连接完成并接通电源后,首先配置电机型号/功率/编码器分辨率和控制模式,设定完成后断电重新启动伺服。
1.电机型号/功率/编码器分辨率设定:2.I/O输入输出分配:3.在SmartJog中的Jog界面中,用手动方式测试电机正反转,如电机正常运转说明线路连接正常。
4.设定伺服运转模式:如正/反转脉冲,脉冲/方向等,设定电子齿轮比。
伺服系统自整定按钮手动测试时的伺服马达速度设定。
伺服马达手动按钮,Forward:正转Reverse测试按钮驱动器重新启动参数复位错误复位5.伺服自整定(Offline Tuning)模式选为1,连接负载,自动测算惯量比一般在参数Pr_3中选择700rpm的Tuning速度,此时得到的惯量比值最准确。
伺服系统自整定按钮自整定测试完成后直接从CSD3驱动器内读出全部参数,此时在SmartJog内根据当前的惯量比值和基本的响应等级(Pr_115=50)会自动计算出一组增益参数值,见SmartJog中参数Group1。
单轴控制器使用手册
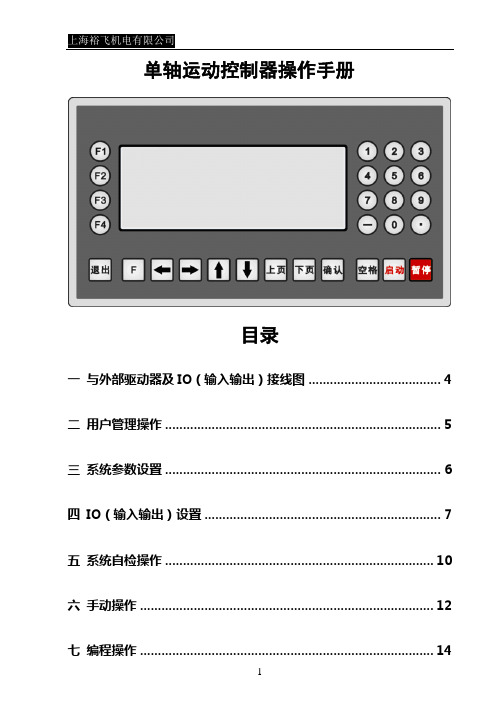
单轴运动控制器操作手册目录一与外部驱动器及IO(输入输出)接线图 (4)二用户管理操作 (5)三系统参数设置 (6)四IO(输入输出)设置 (7)五系统自检操作 (10)六手动操作 (12)七编程操作 (14)八自动执行 (17)九指令详解 (18)十电子齿轮计算及公式 (20)十一编程案例 (23)十二常见问题及处理 (28)一与外部驱动器及IO(输入输出)接线图1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)2.IO(外部开关及继电器)的接线图(红色线为1号线)注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。
用户密码出厂值为“123456”。
用户登录成功后,则可进行加工参数的修改保存。
否则加工参数不可修改保存。
若进入此界面后,提示“用户已登录!”,表示用户登录成功。
然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。
若需要修改,再次进入用户管理进行登录。
注:用户密码可以修改。
但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。
共分两屏,按“上页”“下页”键切换。
控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。
若保存成功则提示“参数保存成功”。
注:加工过程中禁止进行参数保存。
按空格键,可将当前参数值清零。
当设定的速度值小于启动速度时,则速度值为启动速度。
轴系仪表的安装调试
轴系仪表的安装和调试轴振动、轴位移、转速传感器的工作原理基本相同,传感器探头均为电涡流式探头,电涡流式探头由平绕在支架上的铂金属线圈组成,外壳为不锈钢套,套管内填充绝缘材料密封,引线从壳体内引出接同轴电缆。
工作时,传感器通入高频电流,线圈周围产生高频磁场,接近探头端部的金属表面在高频磁场的感应下产生感应电涡流,电涡流对其周边产生电涡流磁场,该磁场方向与探头磁场方向相反,两个磁场叠加改变探头线圈的阻抗。
探头与被测轴表面间距越小,电涡流越大,探头线圈的阻抗越小,探头线圈两端的电压下降。
阻抗在激励电流、频率和材质磁导率不变的条件下,仅与探头端面与金属表面的间隙有关。
与探头配套的前置放大器接受探头阻抗信号,并将其放大、转换为所要的电信号.轴位移监测仪(Bently3500)取其信号的直流分量,经处理后反映轴向位移状况.径向振动监测仪(Bently3500)和转速监测仪取其信号的交流分量,经处理后分别反映径向振动情况和轴转速.3300/7200系列电涡流传感器系统包括前置放大器、探头和延长电缆;前置放大器是成套配置的,不可互换;延长电缆连接在探头与前置放大器之间,从探头端部到前置放大器接口的直线总长度必须是5m或9m;前置放大器电源电压为-24VDC;从前置放大器到监测仪(Bently3500)之间的最长距离不可超过305米;前置放大器的外壳应与前置放大器接线箱绝缘。
3300/7200电涡流传感器系统借助于探头顶端与被观察的导体表面之间的间隙来测量振动及相对位置,并转换成与之成正比例的负电压信号送至监视器.3300/7200电涡流传感器系统实现非接触测量,耐高温,能在油、汽、水等恶劣环境下长期连续工作,其线性范围宽、动态响应好、抗干扰能力强.轴位移监测系统一般用于对压缩机止推轴承磨损状况实施监测与报警,轴位移监测系统不需要整流放大器,由位移检测探头、延长电缆和相应的前置放大器、专用电源及监测仪(Bently3500)组成.探头与前置放大器组成传感器,安装于现场,监测仪对于一般场所宜安装在就地盘上,对于防爆场所,监测仪安装在中控室内,同时配置安保器或外设安保器。
FANUC伺服调试步骤

2021/4/12
BJFANUC LZW
18
确认信息
NC的机型名称 伺服电机的型号名称 电机内置的脉冲编码器的种类 分离式位置检测器的有无 电机每转动一圈的机床的移动量 机床的检测单位 NC的指令单位
BEIJING-FANUC
Series 16i-B α8/3000i αA/1000i 比如: 无 10mm/电机每转动1圈 0.001mm 0.001mm
说明:在全闭环机床上第一次启动时,建议先在半闭环状态下启动,在确认所有动作正确无误后,再切换到全闭 环状态进行最终检查
2021/4/12
BJFANUC LZW
10
数字伺服参数的初始设定
自动手动移动 指令 +
CMR
_
参数1820
BEIJING-FANUC
误差寄存器 诊断300
伺服放大器
GRID
参考计数器容量
xx xx代表的内容 02 Model α1/5000i 05 Model α2/5000i 23 Model α4/4000i 27 Model α8/3000i 43 Model α12/3000i 47 Model α22/3000i 53 Model α30/3000i 57 Model α40/3000i
FANUC伺服调试步骤
伺服调整步骤
伺服调整步骤和方法 1.初始化设定 2.手动对各种功能的调整
或一键设定, 一键调整 3.用SERVO GUIDE 进一步优化
BEIJING-FANUC
2021/4/12
BJFANUC LZW
2
伺服调整内容
BEIJING-FANUC
伺服调整步骤和方法 • 使用HRV2控制的数字伺服参数初始设定 • 速度增益调整
单轴位置伺服系统的设计与实现

单轴位置伺服系统的设计与实现来源:无线测温 1 概述现在的位置伺服系统一般采用所谓的“软伺服”系统,使位置增益不很大,这样系统容易稳定,并且增加一个闭环调速单元,速度环的增益很大。
因此,很小的位置偏差就能产生很明显的速度偏差,速度环就以很高的增益修正,从而使系统得到很高的位置分辨率[1]。
作者在研制一种数控刨齿机时,设计并完成了单轴位置伺服系统,该系统采用半闭环结构,框图如图1所示。
本文将结合该系统,阐述位置伺服系统的组成及硬件实现。
图1 单轴位置控制系统的框图2 位置伺服系统的组成在图1中,位置控制器和速度控制器均由486个人微机编程实现。
电机采用北京数控设备厂的FANUC-BESK(15型)直流伺服电机,并采用该厂的A06B-6054-H005作为功率驱动模块。
由于该速度控制单元是模拟系统,因此采用12位D/A转换器,把微机根据控制算法输出的数字量转换为合适的模拟电压,控制电机向减小位置偏差的方向转动。
位置反馈采用光电编码器,分辨率为4000线/转,经四倍频电路,由可编程计数器8254记录位置脉冲数,位置控制器则根据此脉冲数和指令脉冲数计算出速度指令电压,再输出到一个12位D/A转换器,即得到模拟的速度指令电压。
速度反馈也利用同一个光电编码器和计数电路,速度控制器通过对位置求一阶差分计算出实际转速,然后输出到另一个12位D/A转换器,将得到的模拟电压反馈至速度控制单元的速度反馈输入端。
实际转速ω按ω=ΔN/Ts式求取,其中ΔN为在采样周期内的位置脉冲增量,Ts为采样周期,该系统取8毫秒。
作者编写的CNC控制程序采用前、后台软件结构,前台程序是一个中断服务程序,由硬件实现8毫秒定时中断,主要完成精插补和位置控制功能;后台程序是一个循环运行程序,主要完成数据输入、粗插补及其它辅助功能。
3 伺服系统的实现数模转换采用芯片DAC1210,为了不降低分辨率,用一个电子开关CD4052处理正负号,使数模转换达到双极性12位,为了提高驱动能力和抑制干扰,输出采用集成运放OP07做成射极跟随器的形式,电路如图2所示。
伺服电机调试步骤及操作规程

伺服电机调试步骤及操作规程伺服电机调试步骤伺服电机可使掌控速度,位置精度特别精准,可以将电压信号转化为转矩和转速以驱动掌控对象。
伺服电机转子转速受输入信号掌控,并能快速反应,在自动掌控系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其紧要特点是,当信号电压为零时无自转现象,转速随着转矩的加添而匀速下降。
以下是关于其调试的步骤说明:1、初始化参数在接线之前,先初始化参数。
在掌控卡上:选好掌控方式;将PID参数清零;让掌控卡上电时默认使能信号关闭;将此状态保存,确保掌控卡再次上电时即为此状态。
在伺服电机上:设置掌控方式;设置使能由外部掌控;编码器信号输出的齿轮比;设置掌控信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的掌控电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,假如你只准备让电机在1000转以下工作,那么,将这个参数设置为111、2、接线将掌控卡断电,连接掌控卡与伺服之间的信号线。
以下的线是必需要接的:掌控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和掌控卡(以及PC)上电。
此时电机应当不动,而且可以用外力轻松转动,假如不是这样,检查使能信号的设置与接线。
用外力转动电机,检查掌控卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环掌控系统,假如反馈信号的方向不正确,后果确定是祸害性的。
通过掌控卡打开伺服的使能信号。
这是伺服应当以一个较低的速度转动,这就是传说中的“零漂”。
一般掌控卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)掌控。
假如不能掌控,检查模拟量接线及掌控方式的参数设置。
确认给出正数,电机正转,编码器计数加添;给出负数,电机反转转,编码器计数减小。
DCS810说明书

DCS810数字直流伺服驱动器用户手册版权所有 不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】目 录………………………………………………………………………………..1 前 言 ......................................................................................................................... 3 安全注意事项 ............................................................................................................. 4 概 述 ........................................................................................................................... 6 一. 技术特点 ....................................................................................................... 6 二. 应用领域 ....................................................................................................... 6 三. 技术指标 ....................................................................................................... 7 1.电气特性 ............................................................................................... 7 2.使用环境及参数 ................................................................................... 7 3.机械安装尺寸 ....................................................................................... 8 4.加强散热方式 ....................................................................................... 8 端口定义与接线 ......................................................................................................... 9 一.端口定义 ......................................................................................................... 9 1.电机和电源输入端口 ........................................................................... 9 2.编码器信号输入端口 ........................................................................... 9 3.控制信号端口 ....................................................................................... 9 4.RS232 通讯端口 ................................................................................. 10 5.状态指示 ............................................................................................. 10 二. 应用接线 ..................................................................................................... 11 1.控制信号接线 ..................................................................................... 11 2.控制信号时序图 ............................................................................... 132 3.控制信号模式设置 ............................................................................. 13 4.编码器接线 ......................................................................................... 13 5.串口接线 ............................................................................................. 14 伺服系统安装与调试 ............................................................................................... 15 一.准备工作 ....................................................................................................... 15 1.安装编码器 ......................................................................................... 15 2.准备电源 ........................................................................................... 155 3.准备信号源 ....................................................................................... 155版权为深圳市雷赛机电技术开发有限公司所有 URL: 1DCS810 数字直流伺服驱动器使用手册 V1.0DCS810 数字直流伺服驱动器使用手册 V1.0二.电机连接 .................................................................................................... 15 三.伺服参数整定 .......................................................................................... 166 四. 注意事项 ................................................................................................... 166 五. 典型接线图 ................................................................................................. 16前言感谢您选用深圳市雷赛机电技术开发有限公司 DCS 系列直流伺服驱动器。
实验七 交流伺服电机单轴定位控制实验
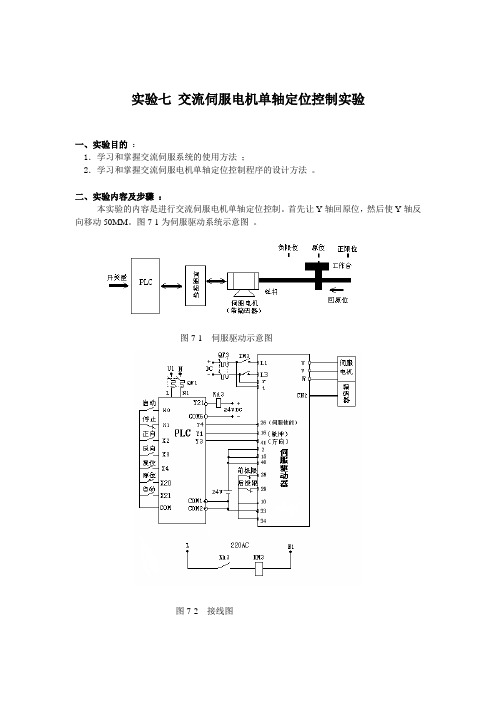
实验七交流伺服电机单轴定位控制实验一、实验目的:1.学习和掌握交流伺服系统的使用方法;2.学习和掌握交流伺服电机单轴定位控制程序的设计方法。
二、实验内容及步骤:本实验的内容是进行交流伺服电机单轴定位控制。
首先让Y轴回原位,然后使Y轴反向移动50MM。
图7-1为伺服驱动系统示意图。
图7-1 伺服驱动示意图图7-2 接线图实验步骤 :1.学生根据图7-2接线(为安全起见,伺服电机和驱动器的主控电路以及PLC 外围的继电器KA3、接触器KM3输出线路已接好);2.征得老师同意后,合上断路器QF1和QF3 ;3.将面板上“工作方式”旋钮旋至“点动” ;4.按“启动”按钮,接触器KM3的主触头闭合,伺服电机得电,延时2秒输出Y4 ,使伺服电机准备好 ;5.输入PLC 程序,然后运行 ;6.按“正向”或“反向”按钮,将Y 轴移动至原位和正极限之间 ;7.按“复位”按钮,使伺服电机驱动Y 轴回原位,读取此时指针指向的标尺位置A ;8.将面板上“工作方式”旋钮旋至“自动”,Y 轴反向移动50MM ,读取此时指针指向的标尺位置B ;9.按“停止”按钮,接触器KM3的主触头断开,驱动器断电 。
三.实验说明及注意事项1.为避免Y 轴发生碰撞而损坏,应确保前极限和后极限有效。
将前极限的一端接至交流伺服电机的输入端28,另一端接10;将后极限一端接至交流伺服电机的输入端29,另一端接10 !2.脉冲输出指令“DPLSY ”是以指定的频率产生定量脉冲的指令,其使用方法如下 :其中: * S1为指定频率,设定范围为:2—20000HZ ;* S2为总脉冲数,设定范围为:1—2,147,483,647 PLS (因为DPLSR 为32 位运算指令)。
如果S2设为0,则脉冲持续产生;* D 的规定: (1).只能为Y0或Y1 ;(2).PLC 一定为晶体管输出型 。
* X10置为ON 时,输出开始,当X10置为OFF 时,输出中断,再度置于ON 时,从初始动作开始运行(在脉冲持续产生时: X10置为ON ,Y000或Y001变为ON ;X10置为OFF , Y000或Y001变为OFF ) 。
上银伺服电机调试说明书

沒有功能
伺服激磁(Servo ON) 左極限輸入
右極限輸入
馬達過溫訊號輸入,通常設定在I5, 接馬達過溫訊號線
設定目前位置為驅動器座標原點,並開啟精度補償表 重置驅動器,相當於重開電源 當使用內建歸原點時,要找原點開關來做歸原點時,原 點開關的輸入
Clear Error
清除錯誤(Alarm)
Zero Speed Clamp
第二十九页,课件共有36页
接线CN6 腳位功能說明
第三十页,课件共有36页
外部接线說明
市电单相 220V电压 ,对应接 L1,L2以及 地线
L1C与L1并联 L2C与L2并联
CN2接口,用于带刹车电机,接 线规范:
1. 24V正极联入+24V孔,负
极联RTN. 2. 动力线之B+,B-对应B+,B-
功能說明
沒有功能 內建煞車邏輯輸出,預設在O4 當驅動器Servo ON且無任何錯誤時輸出 與Servo Ready呈反向 當命令接收完畢且追隨誤差低於Target radius時輸出 當電機在移動時輸出 內建歸原點程序完成 AC伺服馬達串列編碼器index輸出 當速度低於vel_stop輸出 當有錯誤產生時輸出,相當於Alarm
選擇方向觸發 相對移動或吋動
性能測試-測試運轉
Step 1選擇單位 ,
建議先選mm
Step 3 寸動測試 選擇Jog
Step 2 運動參數設定, 一開始請使用較慢速度
可如下設定
Step 4 慢慢吋動到負極限,看運動 是否平順,若有抖動或異音 降低Primary CG,
第二十一页,课件共有36页
性能測試-測試運轉
第三十六页,课件共有36页
Lightening語言切換
东么川伺服 PMS718A B 数字型伺服电机驱动器使用手册说明书
东么川伺服东么川—专注于电机设计与控制技术研究中国-深圳深圳市东么川伺服控制技术有限公司地址:深圳市龙华新区油松路油富科技园8栋3楼电话:*************传真:*************技术支持:134****0132网址:使用手册USERˊS GUIDE Version 1.1版权所有不得翻印【使用前仔细阅读本手册,以免损坏驱动器】PMS718A/B同步/无刷电机闭环伺服驱动器PMS718A产品使用注意事项2.4 安装尺寸短路:当异常电流大于50A时,产生短路保护过流:当电流超过工作电流设置值并持续一设定时间后产生过流保护过压:当电压超过55V时产t生过电压保护欠压:当电压低于18V时s产生欠电压保护。
霍尔异常:包括相位异常及值异常.IIT保护:防止电机堵转大量发热.引脚排列及相关名称:接口,不能同时使用,其引脚排列如下图,引脚号对应名称在下表中描述:JR12座引脚图引脚X1,X2,X3,X4,EN, FR 引脚可接无源开关量输入,也可接有源输入电压应在 -1V 至27V 之间,过低或过高电压可能损坏输入端口。
FR 端子用于控制电机转动方向FR 端子不同电平切换时会根据加减速时间设定值, 先减速到 0, 然后切换方向再从 0速加度到给定值。
如果电机拖动的负载惯量大, 应适当加大加减速时间,否则在方向切换时有过流或者电压过高的情况。
EN 电机使能端子EN 脚与GND 的接通与断开可控制电机的运行与停止,只有在EN 脚与GND 连接时其它的操作才能被允许, 若断开则电机处于自由状态, 其它的操作被禁能。
当电机出现故障时, 可以先断开 EN 引脚, 然后再接通来清除故障。
X1,X2,X3,X4 IO 输入端子(可选,并非所有型号有此功能) d 该输入信号为保留输入端子。
作为定制化应用的输入信号4.2 引脚PG 、ALM 对应的内部电路:PG ,ALM 信号为驱动器输出信号PG 信号用于提供电机编码器转速脉冲信号,PG 信号为开漏输出,测试时应在5V 与PG 之间加一个2K-10K 电阻作上拉电阻g 。
之山伺服器说明书
目录安全事项 (1)第一章产品检查与型号说明 (3)第二章安装 (4)第三章信号和接线 (8)第四章参数说明 (15)第五章面板显示及操作 (25)第六章运行 (28)安全事项欢迎您使用杭州之山科技有限公司生产的纺机专用伺服控制系统。
在产品存放、安装、配线、运行、检查或维修前,用户必需熟悉并遵守以下重要事项,以确保安全地使用本产品。
错误操作可能会引起危险并导致人身伤亡。
错误操作可能会引起危险,导致人身伤害,并可能使设备损坏。
严格禁止行为,否则会导致设备损坏或不能使用。
1、使用场合● 禁止将产品暴露在有水气、腐蚀性气体、可燃性气体的场合使用。
否则会导致触电或火灾。
● 禁止将产品用于阳光直射,灰尘、盐分及金属粉露末较多的场所。
● 禁止将产品用于有水、油及药品滴落的场所。
2、配线● 请将接地端子可靠接地,接地不良可能会造成触电或火灾。
● 请勿将220V驱动器电源接入380V电源,否则会造成设备损坏及触电或火灾。
● 请勿将U、V、W电机输出端子连接到三相电源,否则会造成人员伤亡或火灾。
● 必须将U、V、W电机输出端子和电机接线端子U、V、W一一对应连接,否则电机可能超速飞车造成设备损失与人员伤亡。
● 请紧固电源和电机输出端子,否则可能造成火灾。
● 配线请参考线材选择配线,否则可能造成火灾。
3、操作● 当机械设备开始运转前,必须配合合适的参数设定值。
若未调整到合适的设定值,可能会导致机械设备失去控制或发生故障。
● 开始运转前,请确认是否可以随时启动紧急开关停机。
● 请先在无负载情况下,测试伺服电机是否正常运行,之后再负载接上,以避免不必要的损失。
● 请勿频繁接通、关闭电源,否则会造成驱动器内部过热。
4、运行● 当电机运转时,禁止接触任何旋转中的零件,否则会造成人员伤亡。
● 设备运行时,禁止触摸驱动器和电机,否则会造成触电或烫伤。
● 设备运行时,禁止移动连接电缆,否则会造成人员受伤或设备损坏。
5、保养或检查● 禁止接触驱动器及其电机内部,否则会造成触电。
伺服控制器的安装步骤和注意事项

伺服控制器的安装步骤和注意事项伺服控制器是一个重要的设备,用于控制伺服电机的运行和操作。
它被广泛应用于自动化控制系统中,包括机械加工、机器人工程、印刷等领域。
正确安装伺服控制器是确保系统正常运行的关键步骤。
在本文中,我们将分享伺服控制器的安装步骤和注意事项。
安装步骤:1. 选择适当的位置:首先,选择一个适当的位置来安装伺服控制器。
这个位置应该远离任何可能产生热量、腐蚀性化学物质或尘埃的地方。
此外,要确保该位置易于访问,并能够提供足够的通风。
2. 检查电源要求:在安装伺服控制器之前,确保了解其电源要求,并确保可供应足够的电源。
在连接电源之前,务必关闭所有电源开关,并确保电源线正确接地。
3. 连接控制器和伺服电机:将伺服电机与伺服控制器连接。
确保连接正确,检查电缆和连接器的质量。
根据供应商提供的电路图或连接指南,正确地连接电缆。
4. 安装冷却系统:如果伺服控制器需要冷却系统,确保正确安装并及时维护该系统。
冷却系统的类型和安装方式可能因制造商而异,因此在安装之前务必仔细阅读并遵循相关的安装指南。
5. 安装附件:根据需要,安装任何附件,如散热片或保护罩。
这些附件有助于提高伺服控制器的性能和保护其免受外部损害。
6. 连接监控系统:如果需要连接监控系统或其他外部设备,请确保正确连接并测试它们的功能。
这些外部设备可能包括传感器、编码器或触摸屏等。
注意事项:1. 遵循制造商的指南:在进行伺服控制器的安装之前,务必仔细阅读制造商提供的安装说明和操作指南。
这将确保正确而安全地安装控制器,并充分发挥其性能。
2. 注意电源线:正确连接和绝缘电源线非常重要。
确保在操作之前检查电源线,排除任何损坏或短路的可能性。
永远不要在潮湿或有水的地方安装伺服控制器。
3. 防止过热:伺服控制器在运行过程中会产生热量,因此防止过热非常重要。
确保安装位置具有良好的通风,并避免附近堆放物品,以防止过热。
4. 定期维护:定期维护伺服控制器是确保其长期稳定运行的关键措施。
030411l02-伺服电动机控制系统安装、调试与运行(2)概要

会使用伺服驱动控制器;会设计伺服控制系统电路;
素养目标
安全生产、环保节能、团队合作、职业规范。
教学重点
伺服驱动器各端子的功能及控制电路设计;
教学难点
伺服驱动器各端子的功能及控制电路设计;
参考教材
李幼涵主编,伺服运动控制系统的结构及应用;
教学策略
以单轴伺服控制系统为载体,介绍伺服电动机的结构,伺服驱动器工作原理,伺服系统的工作模式,伺服驱动器各端子的功能及控制电路设计,使用任务驱动教学方法。
《电机驱动与伺服控制》课程教案
课题
项目四任务1伺服电机控制系统安装、调试与运行(2)
课时数
2
授课班级
授课时间
授课地点
运动控制实训室
授课形式
理实一体
其他资源
多媒体PPT、PLC伺服驱动系统综合实训装置、动画、图片、微课、教学录像、PLC和伺服驱动器说明书、国家标准。
教学目标
知识目标
伺服驱动器各端子的功能及控制电路设计;
环节
(用时)
内容
活动
手段与资源
教师
学生
20分
伺服驱动器各端子的功能;
讲授
学习
PPT、动画、
图片
25分
控制电路设计;
讲授
学习
PPT、动画、
图片
45分
设计出位置控制模Βιβλιοθήκη 的电气原理图讲授学习
综合实训装置、说明书、国家标准
课后小结
030411l03-伺服电动机控制系统安装、调试与运行(3)

课题
项目四 任务1 伺服电机控制系统安装、调试与运行(3)
课时数
2
授课班级
授课时间
授课地点
运动控制实训室
授课形式
理实一体
其他资源
多媒体PPT、PLC伺服驱动系统综合实训装置、动画、图片、微课、教学录像、PLC和伺服驱动器说明书、国家标准。
教标
会使用伺服驱动器;根据不同控制方式设置伺服驱动器参数;
素养目标
安全生产、环保节能、团队合作、职业规范。
教学重点
电子齿轮的计算;伺服驱动器参数基本参数的设置;
教学难点
电子齿轮的计算;伺服驱动器参数基本参数的设置;
参考教材
李幼涵主编,伺服运动控制系统的结构及应用;
教学策略
以单轴伺服控制系统为载体,介绍伺服系统的参数,使用任务驱动教学方法。
环节
(用时)
内容
活动
手段与资源
教师
学生
75分
伺服系统基本参数;
讲授
学习
PPT、动画、伺服驱动器说明书
10分
伺服系统扩展参数1;
讲授
学习
PPT、动画、伺服驱动器说明书
5分
伺服系统扩展参数2
讲授
学习
PPT、动画、伺服驱动器说明书
课后小结
最新fanuc 0i-md系统伺服主轴调试要点v1.1说课讲解

MD伺服主轴调试要点版本:V1.0→V1.1备注:本版本在V1.0上修改,替换原V1.0版本适用于FANUC 0I-MD系统调试之前必须确认系统与主轴放大器、主轴放大器与主轴电机编码器、放大器与主轴外置编码器之间连线是否正确,连接顺序如下:JA41-JA7B 系统→主轴放大器JY A2-主轴电机上编码器主轴放大器JYA2→主轴电机编码器JY A3-主轴外置编码器主轴放大器JY A3→主轴外置编码器(该插口适用与a位置编码器,型号为T302)对于放大器上JYA4插口也适用于a位置编码器,但是其型号为T320,请注意主轴进行控制时候将发生主轴快速旋转并发生9031电机锁住报警。
也就是说在主轴调试之前必须检查主轴电机相序是否正常!!!下面进入调试:在调试未完成前要保持紧急停止按钮按下,以免发生意外1.进入参数画面,没有设置下面参数时候,主轴相关参数是灰色的不能进行设定,此时设置参数8131#5=03701#1=03701#2=03716#0=13717 设置18133#5=0设置好上面参数断总电(指放大器与系统都要断电),等待一段时间后对放大器及系统上电2.此时系统会有报警SP1982 (S1)串行主轴放大器错误、SP1999 主轴控制参数错误报警,这是由于放大器型号未设定产生的。
可以进参数画面检查伺服主轴功能是否启动成功,可以发现4000号以后参数已经激活,但是数据都是0,这是由于未进行电机初始化,下面设定参数进行电机初时话:4019 设置为100000004133 设置电机代码a22/7000 电机代码320a30/6000 电机代码322此时参数设置后必须断总电(指放大器与系统都要断电),等待一段时间后对放大器及系统上电3.如果初时话正常完成,4019#2为1。
如果此时出现9001 主轴过热,检查参数4134,正常其内是有一定数值的,如果该值为0,也会出现该报警。
主轴报警请查看说明书:B-65285CM4.拉起紧急停止按钮后,等待一段时间看主轴是否有报警,如果无报警进行下面调试。
汉峰数控BOSUNMAN博尚伺服全系列说明书手册

注意
接线必须正确而且牢固,否则可能会使伺服电机错误运转,也可能因接触不良而损坏设备。 伺服电机 U、V、W 端子不可反接,不可接交流电源。 伺服电机与伺服驱动器之间须直连,不能接入电容、电感或滤波器等。 防止导电紧固件及电线头进入伺服驱动器。 电线及不耐温体不可贴近伺服驱动器散热器和伺服电机。 并接在输出信号直流继电器上的续流二极管不可接反。
小心
出现报警后必须排除故障原因,并在重新启动前,复位报警信号。 在瞬时停电后重新上电时,应远离机器,因为机器可能突然再启动(机器的设计应保证重 新启动时不会造成危险) 。
其它注意事项
注意
本产品的设计和制造并非是为了使用在对人身安全有威胁的机械和系统中。 用户的机械和系统选用本产品时,须在设计和制造中考虑安全防护 措施,以防止因不当操 作或本产品异常时造成意外事故。 本手册中的插图为代表性图例,可能会与您收到的产品有所不同。 由于产品改良、规格变更以及为提高本手册的使用便利性,我们将 会适时对本手册进行变 更。变更后,本手册的资料编号将进行更新,并作为改订版发行。 因破损或遗失而需订购本手册时,请与本公司联系。 对于客户自行改造的产品,本公司不对质量提供任何保证。对于因 改造产品所造成的伤害 及损失,本公司概不负责。 本产品废弃时请按一般工业废弃物处理。
输入输出端口逻辑解释
低电平——开关闭合 高电平——开关断开 上升沿——开关闭合到断开 下降沿——开关断开到闭合
I
安全注意
安全标识
本手册有关安全的内容,使用如下标识。有关作业安全标识的叙述,请务必遵守。
注意 此符号标示为:应该遵守物品的使用要求或规定!
小心 此符号标示为:有可能导致伤害或物品损害!
IV
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课题
项目四 任务2 单轴伺服控制系统安装、调试与运行(3)
课时数
2
授课班级
授课时间
授课地点
运动控制实训室
授课形式
理实一体
其他资源
多媒体PPT、PLC伺服驱动系统综合实训装置、动画、图片、微课、教学录像、PLC和伺服驱动器说明书、国家标准。
教学目标
知识目标
伺服电动机的位置控制案例;
环节
(用时)
内容
活动
手段与资源
教师
学生
30分
伺服电动机的位置控制案分
伺服电动机的位置控制案例;
讲授
学习
PPT、动画、伺服驱动器说明书
30分
伺服电动机的位置控制系统调试、运行
讲授
学习
综合实训装置、说明书、国家标准、说明书
课后小结
技能目标
会进行伺服电动机的位置控制系统程序设计与调试、运行;
素养目标
安全生产、环保节能、团队合作、职业规范。
教学重点
伺服驱动器参数的设置;伺服电动机的位置控制系统程序设计;
教学难点
伺服驱动器参数的设置;伺服电动机的位置控制系统程序设计;
参考教材
李幼涵主编,伺服运动控制系统的结构及应用;
教学策略
使用任务驱动教学方法。编写控制程序,并进行调试、运行。