直线电机仿真软件说明..
永磁同步直线电机硬件在环实时仿真平台概要

永磁同步直线电机硬件在环实时仿真平台摘要:实现了一种全集成可变带宽中频宽带低通滤波器,讨论分析了跨导放大器-电容(OTA—C)连续时间型滤波器的结构、设计和具体实现,使用外部可编程电路对所设计滤波器带宽进行控制,并利用ADS软件进行电路设计和仿真验证。
仿真结果表明,该滤波器带宽的可调范围为1~26 MHz,阻带抑制率大于35 dB,带内波纹小于0.5 dB,采用1.8 V电源,TSMC 0.18μm CMOS工艺库仿真,功耗小于21 mW,频响曲线接近理想状态。
关键词:Butte作者:王振滨职称:高级工程师公司:上海电气集团股份有限公司中央研究院应用领域:控制与仿真挑战:采用LabView8.6.1和两个cRIO软硬件平台快速搭建一套永磁同步直线电机硬件在环实时仿真系统。
应用方案:使用NI公司的LabView8.6.1、cRIO9074和cRIO9004软、硬件平台成功搭建一套永磁同步直线电机硬件在环实时仿真平台。
其中cRIO9074和cRIO9004分别用于永磁同步直线电机控制器仿真和永磁同步直线电机模型仿真,两者采用高速数、模数据采集卡进行数据交换,且其核心算法全部在FPGA 中完成,具有50us级的高实时性特点。
使用的产品:LabView8.6.1/RT/FPGA;cRIO9074,cRIO9004,9104;两块9401;9215,9264,9205各一块介绍:永磁同步直线电机由于其高速度、高精度和高刚度等优异性能,目前受到国内外广泛关注。
但与传统旋转电机相比,直线电机试验难度大、危险性高,如操作不当极易发生飞车,造成人身和财产损失。
因此急需搭建一套永磁同步直线电机的硬件在环实时仿真平台。
该仿真平台的快速成功搭建,可以预先验证直线电机的控制算法,从而便于提早发现潜在错误,节约调试成本、缩短调试周期和减小事故发生概率。
正文:一、引言直线电机驱动的高速直线运动单元取消了从伺服电机到工作台之间的中间传动环节,把运动单元的传动链缩为零,称为“零传动”。
基于cSPACE的直线电机实时仿真控制系统研究实现

基于cSPACE 的直线电机实时仿真控制系统研究实现Stydy of the linear motor real-time simulation control system based on cSPACE曹荣敏1,2,周惠兴1,3 ,梁文宇1,朱 涛3CAO Rong-min1,2, ZHOU Hui-xing1,3, LIANG Wen-yu1, ZHU Tao3(1. 中国农业大学 工学院,北京 100083;2. 北京信息科技大学 自动化学院,北京 100192;3. 郑州微纳科技有限公司,郑州 450016)摘 要:通过Matlab/Simulink设计好多种先进PID控制算法,将输入、输出接口替换为微纳科技公司自主开发的cSPACE模块,用实际直线电机系统代之以其实时模型,并与实际DSP控制器构成闭环系统,从而实现直线电机系统的实时仿真控制。
串口通讯模块可以实现直线电机的启动和停止。
cSPACE提供的MATLAB接口模块,通过图形方式实时观察直线电机运行的轨迹、在线修改控制器参数,实现实时有效的控制。
cSPACE可自动生成并保存MATLAB数据文件,利用MATLAB直接对数据进行分析处理,便于复杂控制系统的开发。
关键词:直线电机系统;硬件在回路仿真;实时控制;PID先进控制算法中图分类号:TP391.9 文献标识码:B 文章编号:1009-0134(2009)12-0081-04收稿日期:2009-11-09基金项目:北京市教育委员会科技计划面上项目资助(KM200811232007);北京市属高等学校人才强教计划资助项目(PHR201007130)作者简介:曹荣敏(1964-),女,副教授,博士,研究方向为数据驱动控制方法研究及应用,直驱技术研究及应用等。
0 引言在直线电机控制系统的传统纯数字离线仿真研究中,电机及负载模型都是在一定假设条件下的简化模型,与实际对象存在差异[1]。
汇川驱动器直线电机调试说明书

直线电机调试简易说明书一、接线说明强电接线端子分配:CN1信号分配图:脉冲信号说明CN1接线示例图(以位置控制模式为例):编码器端口说明:通信连接线说明:二、调试步骤1.打开IS_Opera3.12后台软件,出现一下提示窗口选择Y,则软件自动搜索RS232串口;选择N,则根据用户实际使用的串口进行设置:然后点击“打开串口”即可完成通信连接。
出现以下提示窗口时,直接点击“确定”。
打开IS_Opera3.12后台软件之后,还没有通信连接的,可以从菜单栏点击“开始”→“连接串口”进行通信连接。
2.确认参数数据库为IS620P_Linear_V7.2.mdb。
确认软件版本:驱动器H00.02非标型号为663.01或以上版本,MCU版本号H01-00为7.2,FPGA版本号H01-01为4.1。
3.点击,在参数H02-41输入厂家密码:1430,然后点击。
注意,只有参数H02-41一项打“√”。
出现以下提示窗口,点击“确定”即可。
4.点击,然后点击选中驱动器全部参数,如图所示:点击,读取驱动器全部参数。
参数读取完成后,点击,取消勾选驱动器全部参数。
点击,修改电机参数,然后点击将电机参数写入驱动器。
写入参数时的登录名:admin,密码:admin。
后面驱动器所有参数的写入都使用来写入。
输入用户名和密码之后,点击“确定”。
登录成功,点击“确定”。
点击“确定”,开始写入参数。
参数可以一个个勾选和取消勾选,也可以用以下方法进行勾选和取消勾选:点击鼠标右键,出现菜单:点击“本页全选”或者“本页取消”即可。
同样,利用这个菜单也可以实现参数的读取或者写入。
电机参数说明:H00-00:电机型号设为65535;H00-11:连续电流,单位:0.01A;H00-12:连续推力,单位:0.01N;H00-13:峰值电流,单位:0.01A;H00-14:额定速度,单位:mm/s(如果电机未标注,设置为3000);H00-15:最大速度,单位:mm/s(如果电机未标注,设置为3000);H00-16:动子质量,单位:g;H00-17:永磁同步电机极对数:1;H00-18:定子电阻,也称相间电阻,单位:0.001Ω;H00-19:定子电感Ld,也称相间电感,单位:0.01mH;H00-20:定子电感Lq;也称相间电感,单位:0.01mHH00-21:线反电势系数,单位:mV/m/s;H00-22:转矩系数,也叫推力常数,单位:0.01N/A;H00-23:电气常数,单位:0.01ms(如果电机未标注,写入出厂默认值);H00-24:电机常数,单位:0.01N/W2(如果电机未标注,写入出厂默认值);H00-30:编码器选择:0x30-直线光栅尺;H00-31:直线电机N-S极距,单位:0.1mm(为N-N极距/2);H00-32:光栅尺分辨率,单位:0.01um。
jmag直线电机边界条件
JMAG是一款常用的有限元分析软件,可用于直线电机的电磁场仿真分析。
在进行直线电机分析时,需要对边界条件进行设置,以正确地模拟电机的运行环境。
常见的边界条件包括:
1.周期性边界条件:对于具有周期性结构的直线电机,可以使用周期性边界条件
来模拟电机的重复单元。
这种边界条件可以减少计算量并提高计算效率。
2.阻抗边界条件:在电机周围设置阻抗边界条件,可以模拟导体的电阻和电感效
应,从而考虑电流在导体表面上的反射和吸收。
3.辐射边界条件:对于需要考虑磁场辐射效应的情况,可以使用辐射边界条件来
模拟磁场在远场的传播。
这种边界条件可以计算电机的磁场能量辐射和损耗。
4.绝热边界条件:在某些情况下,需要考虑磁场在导体材料内部的能量损耗和热
效应。
在这种情况下,可以使用绝热边界条件来模拟导体材料的热传导和热耗散。
这些边界条件可以根据具体的分析需求和模型规模进行选择和设置。
在JMAG软件中,用户可以根据实际情况选择合适的边界条件,并设置相应的参数来模拟电机的实际运行情况。
某一个圆筒形直线电机瞬态磁场仿真总结报告讲解
37.50 25.00 12.50
0.00 -12.50 -25.00 -37.50 -50.00
0.00
XY Plot 1
Cylindric_PM ANSOFT
Curve Info Moving1.Force_z Setup1 : Transient
5.00
10.00
15.00
20.00
25.00
六、求解设置:求解起始和终止时间分别为0和0.1 秒,步长为0.00025秒,求解400步,场信息保存时 间步长设置为0.0005秒,即每求解两步保存一次, 并添加到时见菜单,如图:
分析自检后进行求解计算,得到在 0.0015秒时的各 参量如下:
1.圆筒直线电机定位力曲线:
Moving1.Force_z [newton]
五、网格剖分设置, 选择Inside Selection 对整个模型内部进行 剖分,具体设置为: Length_Band=0.2cm Length_coil=0.25cm
Length_stator=0.3c m Length_PM=0.2cm
h_Outregion= 0.4cm 剖分效果如图:
InducedVoltage(WindingB) Setup1 : Transient
InducedVoltage(WindingC) Setup1 : Transient
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
Time [ms]
圆筒直线电机A、B、C三相绕组的磁链曲线:
利用Ansoft中的工程电磁场有限元 分析软件Mexwell对某一直线电机进 行仿真。所做的是二维瞬态磁场的分 析,基本步骤为:建模、定义材料属 性、分配材料、划分网格、设置加载、 边界条件、设定求解参数及后处理。
机电控制仿真软件使用说明
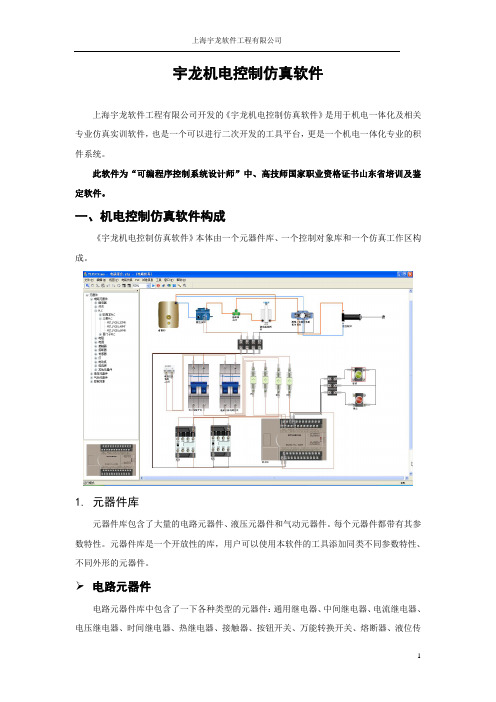
宇龙机电控制仿真软件上海宇龙软件工程有限公司开发的《宇龙机电控制仿真软件》是用于机电一体化及相关专业仿真实训软件,也是一个可以进行二次开发的工具平台,更是一个机电一体化专业的积件系统。
此软件为“可编程序控制系统设计师”中、高技师国家职业资格证书山东省培训及鉴定软件。
一、机电控制仿真软件构成《宇龙机电控制仿真软件》本体由一个元器件库、一个控制对象库和一个仿真工作区构成。
1.元器件库元器件库包含了大量的电路元器件、液压元器件和气动元器件。
每个元器件都带有其参数特性。
元器件库是一个开放性的库,用户可以使用本软件的工具添加同类不同参数特性、不同外形的元器件。
➢电路元器件电路元器件库中包含了一下各种类型的元器件:通用继电器、中间继电器、电流继电器、电压继电器、时间继电器、热继电器、接触器、按钮开关、万能转换开关、熔断器、液位传感器、电磁阀、限位开关、固态继电器、刀开关、PLC、各种电源、控制变压器、桥式整流器、电磁吸盘、交通灯及各种灯具、数码管、各种电动机等。
PLC是其中一类重要电路元器件。
目前,已经涵盖了欧姆龙、西门子和三菱系列PLC。
本系统中提供了以上三种系列PLC部件的仿真程序编辑器。
PLC仿真编辑器➢液压元器件液压元器件包含了各种动力元器件、控制元器件、执行元器件和各种接头。
比如:动力元器件有各种液压泵;控制元器件有各种电磁式换向阀、液控式换向阀、手动换向阀、单向阀、调速阀、减压阀、压力继电器、溢流阀、节流阀、液压缸、行程阀等;执行元器件有各种液压缸和液压马达。
液压元器件图➢气动元器件气动元器件与液压元器件类似。
2.控制系统搭建平台《宇龙机电控制仿真软件》的仿真工作区是一个控制系统的搭建平台。
用户可以从元器件库中选择各种合适的元器件放入仿真工作区。
然后,选择合适的导线或者管路将这些元器件搭建成一个控制系统。
搭建完的控制可以在仿真工作区实现仿真运行。
控制系统搭建平台有以下四项特点:➢随意搭建控制系统控制系统可以随意搭建,不论元器件选型是否正确、不论链路是否正确,控制系统都会实现运行结果。
基于simplore的直线感应电机联合仿真研究
1 线感应电机的模型建立1.1 磁场方程的推导由Maxwell 方程反应宏观的时变电磁场,其微分形式如下。
H J ∇×=+(1) B E tδδ∇×=−(2) 0B ∇•= (3) J E δ= (4)式中:H—磁场强度; E—电场强度; B—磁感应强度;J—电流密度; δ--电导率; t—时间;D—电场通量;1.2 直线感应电机的maxwell 软件建模通过ANYSY EM 软件中的Maxwell 模块建立直线感应电机的2D 有限元模型,二维场中只考虑了电机的纵向边端效应,而其它影响相对较小可忽略。
直线感应电机建模参数如表1所示。
表1 直线感应电机的主要参数类别参数值初级绕组相电压/V 320频率/Hz24初级铁心长度/m 1�926初级铁芯高度/mm150初级铁心宽度/mm 300相数 3每极每相槽数 3级数 6极距/mm 288槽宽/mm 23齿距/mm 9槽深/mm 100线圈匝数 5每极线圈匝数 90初次级气隙/mm 15次级感应板铝板厚度/mm 5次级感应板钢板厚度/mm 25次级感应板宽度/mm 310次级感应板断开间距/m 2初级运动距离/m 6绕线形式 双层Y6a1建模的步骤:电机的几何模型建立、各部分材料选择、设定边界条件和激励源、进行网格剖分、定义执行参数和求解选项。
其中设置的运动部分是初级铁心和绕组,得到如下图的2D 模型如图1,图2是直线感应电机的网格剖分图,图3是直线感应电机的磁感线分布图。
2 控制电路的搭建搭建控制电路由直流电逆变为交流电给直线感应电机供电,而逆变电路的控制信号则由SVPWM 模块提供,图4是整个仿真过mathematical equation, and then the control circuit is built by using SIMPLORE software� On SIMPLORE, the motor model built by Maxwell is embedded into SIMPLORE to carry out cosimulation� Through co-simulation, the actual operation of the motor can be objectively reflected, and the experimental platform for the control of the motor can be provided� It is of high practical value�Key words : Linear induction motors;Simplore;Maxwell;Co-simulation图7 直线感应电机三相电流波形图8是直线感应电机的速度波形图电机从0开始加速起初力较小加速度较小,速度上升的比较缓慢,而后随着力的增大速度快速增加,当达到最大值后,速度会在一定的范围波动。
PSSE机电动态仿真软件介绍
Switched Shunt Data
Transformer Impedance Correction Tables
Multi-Terminal dc Line Data
Multisection Line Grouping Data
Zone Data
Interarea Transfer Data
3. 摆动母线或浮游母线。母线中在一个固定的 参考角控制下,没有功率或者无功限制以及调整 电压。
4. 断离或隔离母线。
IDE默认值为1。
2009-5-18
PSS/E机电动态仿真软件概述
13
GL
接地并联导纳的有功分量。按照每单位电压下以兆瓦 输入。因为电阻和导纳负载是以负载数据部分输入 的,所以GL不包括任何电阻和导纳负载。GL的默认 值是0。
2009-5-18
PSS/E机电动态仿真软件概述
8
潮流数据文件*.raw的建立
由十七组数据段组成。每一个组都包含了在潮流工作 中需要的一类数据。这十七个数据必须下列固定的顺 序存放在raw文件中
算例识别
VSC直流输电线路数据
母线数据
可投切并联支路数据
负荷数据
变压器阻抗校正数据
6
PSS/E程序启动
由十七组数据段组成。每一个组都包含了在潮 流工作中需要的一类数据。这十七个数据必须 以一个固定的顺序存放在raw文件中
2009-5-18
PSS/E机电动态仿真软件概述
7
潮流计算步骤
数据文件建立 潮流计算启动和数据导入 数据检查和修改 潮流计算 结果输出和数据保存 PSS/E的可视化和图形化 潮流结果文件的处理(动态仿真准备)
JMag仿真软件介绍

■ JRI(日本综合研究所)的介绍
The Japan Research Institute, Limited
*成立时间 *资本 *雇员数 *总公司 *经营范围
1969年
100亿日圆 3,385(2004)
东京 & 大阪 think tank
咨询 系统集成
Osaka head office
From Dreams to Reality through “Knowledge Engineering”
Tokyo head office
■ 电磁场分析的重要性 在我们的周围有这么多产品使用电机…
■ 电磁场分析的重要性
工业产品 电子产品
更经济
重量更轻 效率更高
Contour display of results
■动画演示
Animation can be played inside JMAG
studio
Animation can be exported to a file
Animation creation dialog
■应用实例
• 斜槽永磁电机的三维分析 • 爪极发电机的三维分析 • 使用JMAG patch mesh 方法进行速度传感器分析 • 二维磁场/三维热力分析 • 永磁电机的振动分析 • 二维磁场/三维振动分析 • 铁耗分析
被选择的高亮区域
设置条件的对话 框
■智能的自动网格生成器
依据几何对称条件,自动网格生成器相应的生成对称网格。 这个功能能使 JMAG精确的求取某些数据,例如齿槽效应转距,它对网格的对称性要求很 严格.
■智能的自动网格生成器
自适应网格
1st 3rd
基于FLUX的直线电机建模及仿真分析

—பைடு நூலகம்
自动化 、 交通与民用 、 军事及其他行业都有广泛的 用 途 ¨ 。国 内对 直 线 电机 的 研 究 以 中 国科 学
院 电工研 究所 为最 早 , 国内直 线 电机 的 产品很 少 ,
其 理论研 究还 不 完 善 , 前都 是 基 于 假 设 的数 学 以
Ke y wor Li e rmo o FLUX ; o ln ds n a tr; m dei g
0 引 言
随 着科技 的 发展 , 色制 造 理 念 得 到 不 断 深 绿 入 与强 化 , 直线 电机 即 是 制 造业 近 几十 年 才兴 起 的绿 色产品 之一 , 它具 备许 多优点 , 有广阔 的 应 具 用 前景 。其 中在物 流输送 系统 、 工业 设 备 、 息 与 信
—
o
2 直 线 电机 建 模
参数化 建模 可 以 使 电机 进 行 多种 结 构 参 数 、 电气参 数 以及 不 同物 理 材 料 下 的计 算 , 而 可 以 从
建模 , 关于 电磁 场 的分 析 还 不 全面 J 。只 有通 过 对场 的分析 , 能较 准确地 计算 其特 性 , 些年 有 才 近 限 元方法 得到 广 泛应 用 , 它能 够 很 好 的解 决 电机 电磁 场 分 析 1 。针 对 电机 的 仿 真 分 析 ,L X 司题 FU
s i i o tie .T ers l i it d c d b e y h d a tg so aa t c mo e y ut s ban d h eut s nr u e r f ,te a v na e fp rmer d lae o il i
po o e r p s d,i c n b s d t i c e eo me t n e e r h o i k n fmoo s t a e u e o d r td v l p n d r s a c ft s i d o tr . e a h
南京宇航——仿真软件操作说明书(一)

YHCNC-FANUC仿真软件操作说明书前言南京宇航自动化技术研究所是以南京东南大学、南京航空航天大学作为技术依托,一直致力于计算机辅助设计与制造技术(CAD/CAM)、数控技术(CNC)与网络集成技术的研究、开发、推广和应用,拥有一支强大的、经验丰富的技术支持和服务队伍,也是江苏省高校金工教学主要承建单位。
南京宇航自动化技术研究所开发FANUC、SIEMENS系统数控车、数控铣及加工中心模拟仿真教学软件,是结合机床厂家实际加工制造经验与高校(含职业技术学院、中等专业学校、技工学校和职业学校)教学训练一体所开发的。
通过该软件可以使学生达到实物操作训练的目的,又可大大减少昂贵的设备投入。
该软件具有FANUC、SIEMENS系统功能,学生通过在PC机上操作该软件,能在很短时间内就能操作FANUC、SIEMENS系统数控车、数控铣及加工中心,可手动或CAD/CAM编程和加工,教师通过网络教学,监看窗口滚动控制,可随时获得学生信息。
该软件兼容性广,可和国内数控设备配套教学使用。
南京宇航自动化技术研究所2004年5月目录第一章YHCNC概述 (5)1.1 YHCNC虚拟CNC (5)1.2 YHCNC的安装 (6)1.2.1 安装环境 (6)1.2.2 软件安装 (6)1.2.3 在安装期间生成的重要文件 (12)1.3 YHCNC的功能 (12)1.3.1 控制器 (12)1.3.2 功能介绍 (15)第二章YHCNC 操作 (16)2.1 执行和退出 (16)2.1.1 执行 (16)2.1.2 退出 (17)2.2 基本操作 (17)2.2.1 工具条和菜单的配置 (17)2.2.2 文件管理菜单 (18)第三章FANUC 0D 操作 .................................................................. 错误!未定义书签。
3.1 FANUC 0D 机床操作面板操作 ......................................... 错误!未定义书签。
comsolmultiphysics精典实例直线电机建模仿真

模型描述 – 方程
在二维问题中,COMSOL利用磁势A的静磁方程求解该问题
01r1Az 0 0 1 1 rr 1 1B BrryxJze
结果
Z分量的电势分布
感 谢
COMSOL AC/DC模块培训
主讲人: 上海中仿科技
利用COMSOL计算直线电机
直线电机是一种不用其他装置就能产生直线运动的 电机设备。沿半径方向把旋转电机的定子和转子切开,产 生一个直线推力,就成了直线电机。
AC/DC_Module/Motors_and_Drives/coil_LEM
模型描述 –几何
DMI仿真软件操作说明书(doc11页)

DMI仿真软件操作说明书(doc11页)DMI仿真软件操作说明书(doc 11页)DMI仿真软件使用说明书DMI仿真软件,让你更快的掌握DMI的使用,熟悉DMI的功能…制作小组:21组组长:黄鸿珺 20088525组员:魏红燕 20088510王珂麟 20088520高正乾 20088524目录产品说明书使用须知:由于该系统完全模拟CTCS功能所以读者需要了解CTCS的功能。
CTCS系统描述CTCS基本功能:在不干扰机车乘务员正常驾驶的前提下有效地保证列车运行安全。
1.安全防护:在任何情况下防止列车无行车许可运行。
防止列车超速运行。
包括:列车超过进路允许速度;列车超过线路结构规定的速度;列车超过机车车辆构造速度;列车超过铁力有关运行设备的限速;防止列车溜逸。
2.人机界面:为乘务员提供的必须的显示,数据输出及操作装置。
能够以字符,数字及图形等方式显示列车运行速度,允许速度,目标速度和目标距离。
能够实现给出列车超速,制动,允许缓解等表示以及设备故障状态的报警。
3.检查功能:具有开机自检和动态检测功能。
具有关键动作的记录功能及监测接口。
4.可靠性和安全性:按照信号故障导向安全原则进行系统设计,采用冗余结构,满足电磁兼容性相关标准。
DMI人机界面DMI是列控车载设备的显示和操作界面,安装在便于司机操作和观察的位置。
相关规定应符合有关标准和技术条件的要求1.报警功能人机界面应设有声报警功能,能够及时给出列车超速,切除牵引力,制动,允许缓解或故障状态等的报警和表示。
2.人机界面应有数据功能输出列车参数有关的信息,输入操作应简明并有清晰的表示。
对机车乘务员输入的数据和操作应进行合理性判断。
3.设置位置:应设置在机车乘务员便于观察及可接近的区域,符合标准化安装尺寸要求。
显示部分要便于观察,常用按钮,开关应易于机车乘务员操作。
4.DMI的显示与操作标准统一文字及语音信息采用中文,用双针速度表,数字,图形显示相结合的方式提供运行速度,允许速度,目标速度和目标距离。
南京宇航——仿真软件操作说明书(一)
YHCNC-FANUC仿真软件操作说明书前言南京宇航自动化技术研究所是以南京东南大学、南京航空航天大学作为技术依托,一直致力于计算机辅助设计与制造技术(CAD/CAM)、数控技术(CNC)与网络集成技术的研究、开发、推广和应用,拥有一支强大的、经验丰富的技术支持和服务队伍,也是江苏省高校金工教学主要承建单位。
南京宇航自动化技术研究所开发FANUC、SIEMENS系统数控车、数控铣及加工中心模拟仿真教学软件,是结合机床厂家实际加工制造经验与高校(含职业技术学院、中等专业学校、技工学校和职业学校)教学训练一体所开发的。
通过该软件可以使学生达到实物操作训练的目的,又可大大减少昂贵的设备投入。
该软件具有FANUC、SIEMENS系统功能,学生通过在PC机上操作该软件,能在很短时间内就能操作FANUC、SIEMENS系统数控车、数控铣及加工中心,可手动或CAD/CAM编程和加工,教师通过网络教学,监看窗口滚动控制,可随时获得学生信息。
该软件兼容性广,可和国内数控设备配套教学使用。
南京宇航自动化技术研究所2004年5月目录第一章YHCNC概述 (5)1.1 YHCNC虚拟CNC (5)1.2 YHCNC的安装 (6)1.2.1 安装环境 (6)1.2.2 软件安装 (6)1.2.3 在安装期间生成的重要文件 (12)1.3 YHCNC的功能 (12)1.3.1 控制器 (12)1.3.2 功能介绍 (15)第二章YHCNC 操作 (16)2.1 执行和退出 (16)2.1.1 执行 (16)2.1.2 退出 (17)2.2 基本操作 (17)2.2.1 工具条和菜单的配置 (17)2.2.2 文件管理菜单 (18)第三章FANUC 0D 操作...............................................................................错误!未定义书签。
基于Maxwell2D软件的直线电机性能仿真分析_刘再跃

注:“+”表示电机的初、次级之间为斥力;“ ”表示为吸力,
下同。(条件:相电流 350A,频率 20Hz,气隙 11mm,转差率 s=1)
从表 1 中数据可以看出,在相电流为 350A,
频率为 20Hz,气隙长度为 11mm,转差率 s=1 的条
件下,对于单纯的铝板次级和铁板次级而言,厚度
增加,其推力值和法向力(绝对值)也在增加;对
图 5 铝板(厚 12mm)次级表面电流 受到的电磁力密度矢量图
Fig.5 Vector density diagram of electromagnetic force reacfted to the secondary surface current of sheet aluminium(thickness:12mm)
(Aviation University of Airforce,Changchun 130022)
Abstract:The effects of secondary material to the distribution of magnetic fields and the running performance of linear introduction motor are analyzed by employing Maxwell 2D to simulate linear introduction motor's electromagnetism fields.Methods to adjust end effects and the conclusion of simulation are presented,which have some reference value to the design and development of linear introduction motor in scientific research. Key words:linear introduction motor;simulation;Maxwell 2D
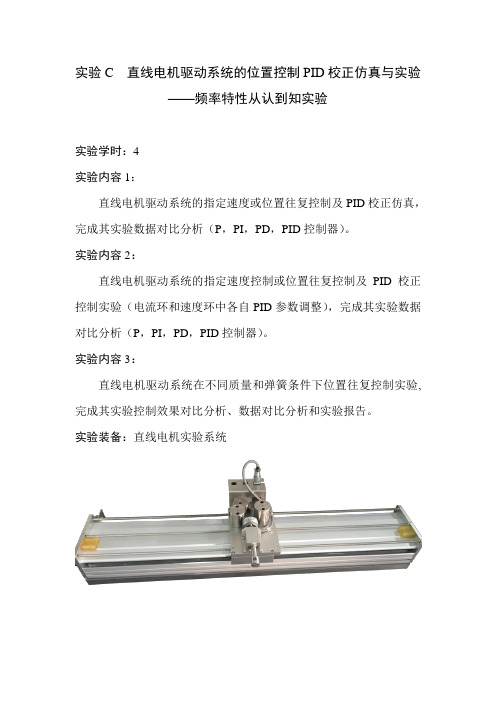
实验C 直线电机PID校正仿真与实验
u(t)
KP
e(t)
1 TI
t
e(t)dt TD
0
de(t)
dt
或写成传递函数的形式:
(4.2)
G( s)
U (s) E(s)
KP 1
1 TI s
TDs
(4.3)
式中: K P ——比例系数;TI ——积分时间常数;TD ——微分时间常数。
3) 双击“PID”模块,分别设置参数为 KP,KI,KD 参数
4) 点击“ ”运行程序, 双击示波器“Scope1”,点击“ ”得到系统的阶跃响应曲线: 相应的控制器输出,示波器“Scope2”曲线为:
2. 实时控制 1) 打开倒立摆电控箱上的电源按钮,并将弹簧小车扶至中间。 2) 在 MATLAB/Current Folder 中打开文件“e4\demo04.slx”,会弹出如图所示的实时控 制界面。
在控制系统设计和仿真中,也将传递函数写成:
G(s) U(s) E(s)
KP
KI s
KDs
KDs2
Kps KI s
(4.4)
式中: K P ——比例系数; K I ——积分系数; KD ——微分系数。上式从根轨迹角度
看,相当于给系统增加了一个位于原点的极点和两个位置可变的零点。
(1.3)
由上式可知,系统的两个开环极点为
7.1263i
注意
此处 M 为小车及所有砝码总和,如无特殊说明,本手册以下推导均基于(1.3) 模型
2. 在 MATLAB/Simulink 中建立数学模型(1.3)所对应的开环系统的结构图如下所示: A. 建立如式(1.3)所示的数学模型的开环系统 I:
「讲解」电机仿真案例介绍!讲解直线电机或发电机的建模仿真

「讲解」电机仿真案例介绍!讲解直线电机或发电机的建模仿真来源:机械社区“AC/DC 模块”中的旋转机械,磁场物理场接口可用于模拟旋转机械,如电动机或发电机。
利用磁场和移动网格这两个物理场接口模拟直线设备或管式设备时,定制的线性周期性边界条件是非常适合的。
在本篇文章中,我们将探索如何定制线性周期性边界条件,并模拟用于波浪能的管式发电机。
直线电机或发电机直线电机 (LEM) 是一种能进行直线运动的机电设备,无须使用任何机构它就能将旋转运动转换为直线运动。
直线电机和旋转电机相似,定子和转子沿径向平面被切割并展开以提供线性推力。
相同的电磁力在旋转电机中产生扭矩,在直线电机中则产生直接的线性力。
值得一提的是,“AC/DC 模块”中的旋转机械,磁场接口包含模拟旋转机器所需的所有功能部件。
该接口结合了磁场接口;磁场,无电流接口和移动网格接口。
经定制后此接口适用于模拟旋转机器,由此极大地简化了静态域和旋转域的定义,以及两者之间接口的处理。
在模拟模型的扇形区域或某一部分以获得完整设备的仿真结果时,扇区对称和周期性边界条件这样的功能部件也极其有用。
尽管该接口显著减少了建立旋转运动模型所需的工作,但直线运动中不能使用该接口。
下面,我们将演示如何对磁场和移动网格这两个物理场接口定制耦合来模拟管式发电机。
另外,还会解释如何创建线性周期性边界条件,这是利用广义拉伸算子模拟直线/管式电机或发电机的一个重要元素。
用于波浪能转换系统的管式发电机管式电机在许多应用中受到青睐,从车辆的主动悬架系统到潮汐能和波浪能转换系统都有涉及。
管式电机的传输效率比传统的直线和旋转转换系统高出许多,因为推力直接作用于负载。
管式电机的另一个优势是,没有定子端部绕组。
因此,铜损相对较少,永磁材料的利用率很高。
下面,我们将讨论对管式发电机进行模拟的技巧(如下图所示)。
管式发电机包含两个主要零件:一个静态定子和一个作直线移动的滑块。
定子由三相绕组和一个非线性磁芯构成。
电力电子系统仿真软件介绍及实例分析

MATL AB/Simulink为运行环境,
3
熟悉Simulink的用户,会很轻松的掌
握PLECS软件的编辑原理。
5
当仿真既含有电路部分又含有复杂的
控制方案的系统时,
2
作为Simulink的工具箱,和
Simulink下的其他模块并列存在.
4
PLECS是特别为电力电子系统的仿真
而开发的,
6
它同样是一个非常有效实用的工具。
单击此处 添加大标 题内容
MATL AB是MATrix L ABorator y的缩写,是一款由美国 The MathWorks公司出品的商业数学软件。MATL AB是一种 用于算法开发、数据可视化、数据分析以及数值计算的高级 技术计算语言和交互式环境。除了矩阵运算、绘制函数/数据 图像等常用功能外,MATL AB还可以用来创建用户界面及与 调用其它语言(包括C,C++和FORTRAN)编写的程序。 尽管MATL AB主要用于数值运算,但利用为数众多的附加工 具箱(Toolbox)它也适合不同领域的应用,例如控制系统 设计与分析、图像处理、信号处理与通讯、金融建模和分析 等。另外还有一个配套软件包Simulink,提供了一个可视化 开发环境,常用于系统模拟、动态/嵌入式系统开发等方面。
Controller simulation result
Simulation diagram
Controller simulation result
添加标题
DC voltage
2.PMSM speed
添加标题
PMSM current A)
4.Grid voltage/current(ph.
Matlab 控制工具箱
comsol直线电机的仿真论文

comsol直线电机的仿真论文标题:COMSOL软件在直线电机仿真中的应用摘要:本文探讨了COMSOL软件在直线电机仿真中的应用。
通过使用COMSOL软件的电磁场有限元分析功能,我们可以对直线电机的性能进行详细模拟,从而更好地理解其工作机制并优化设计。
首先,我们使用COMSOL软件对直线电机进行了模型建立和网格划分,然后对其进行了静态和动态仿真。
通过对比实验和仿真结果,我们发现COMSOL软件的仿真结果与实验结果具有较好的一致性,从而验证了其有效性。
最后,我们根据仿真结果对直线电机进行了优化设计,并提出了进一步的研究方向。
关键词:COMSOL软件,直线电机,有限元分析,仿真,优化设计引言:直线电机是一种将电能直接转换为直线运动的新型电机,具有高速度、高精度和高效率等优点。
然而,为了充分发挥其优点,需要对其设计进行优化。
传统的优化方法主要基于实验和经验,不仅耗时而且成本高。
因此,采用计算机仿真是一种有效的替代方法。
COMSOL软件是一款多物理场仿真软件,具有强大的电磁场分析功能,可以用于直线电机的仿真和优化设计。
正文:1.模型建立和网格划分2.首先,我们使用COMSOL软件的CAD模块建立了直线电机的三维模型。
然后,我们使用COMSOL软件的网格模块进行了网格划分。
在划分网格时,我们采用了四面体网格,并对电机线圈和磁铁部分进行了加密处理。
3.静态仿真4.在静态仿真中,我们主要关注电机在静态状态下的磁场分布和力矩性能。
通过设置不同的电流值和磁铁极性,我们得到了电机在不同条件下的磁场分布和力矩性能。
通过对比实验结果和仿真结果,我们发现仿真结果与实验结果具有较好的一致性。
5.动态仿真6.在动态仿真中,我们主要关注电机在动态状态下的性能。
通过设置不同的速度和负载条件,我们得到了电机在不同条件下的速度-力矩曲线和电流-力矩曲线。
通过对比实验结果和仿真结果,我们发现仿真结果与实验结果具有较好的一致性。
7.优化设计8.根据仿真结果,我们对直线电机进行了优化设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线电机选型软件手册目录1.0 简介 (1)2.0 主界面 (1)2.1 电机参数(Motor parameters) (1)2.2 应用数据(Application Data) (2)2.3 运动曲线(Movement Profiles) (3)2.4 怎样去创建一个运动周期 (5)2.5 轮廓类型 (6)3.0 仿真 (8)3.1 运行仿真 (8)3.2 解释结果 (10)3.3 改善结果 (10)3.4 将轮廓保存到文件中 (11)3.5 打印仿真报告 (11)1.0 简介首先我们非常感谢您抽时间来使用Tecnotion直线电机仿真软件。
关于Tecnotion,我们知道为给定的应用挑选合适的直线电机是一项艰巨的任务,其中包含大量的有联系的设计选择。
这个软件就是来帮助您尽可能容易地来选择直线电机,它会帮助您选择合适的直线电机,确定使用哪种放大器,以及建立详细的报告包括所有重要的参数和性能图表。
使用该软件,您可以省去用手自己计算的时间。
市场上大部分软件只是允许用户输入应用数据,会给出它认为用户所需要的直线电机类型,但我们了解到在实际应用中那些事情却不总那么简单。
对于任意给定的应用,可能有多种电机类型能处理任务,但是哪种是最好的选择?这取决于您试图达到什么目的,您是偏重最大速度呢,还是是追求最大效益或者经济效益。
选型软件不知道您的目标,所以我们决定去选择一个迭代的方法来仿真您的驱动任务。
在整个过程的任何时间,您可以改变运动轮廓、应用参数和电机类型,软件能在运行中计算出新结果。
这样您可以尝试各种场景,然后快速地找到最合适您应用的选型。
我们建议您在进行第一次仿真前完整地阅读此手册,此手册除了说明所有的特点和它们怎样工作,您还能发现很多技巧和诀窍,这些技巧将帮助您理解直线电机的输入和输出,以及怎样最好地将它们使用到您的应用中。
2.0 主界面您打开软件后您会看到主界面,在这个界面你可以选择您想用在您的仿真中的直线电机、定义运动轮廓、指定应用数据。
2.1 电机参数(Motor parameters)使用下拉菜单选择您认为适合您应用的电机,根据您需要的峰值推力,参照不同的电机类型,进行评估选择电机。
当您选择了一种电机后,它的最重要规格也会展示出来(下图红色框中所示)。
根据您的应用,您可以选择有铁芯电机(T系列)或者无铁芯电机(U系列)。
每个类型对于不同的应用要求都有其特定的优势,对于电机类型的区别,您可以查看产品目录或者咨询上海微敏自控技术有限公司。
2.2 应用数据(Application Data)在这您可以填写应用数据,每一个应用数据(红色框所示)将会影响您所使用电机运动的动态性能和热性能。
电机连接的散热器的估计温度。
如果使用了水冷,这个值应该是水的温度。
电机外壳和散热器之间的热阻,这个值取决于实际应用,一般值如下:安装到散热器或滑块0.05K/W空冷0.04K/W水冷0.02K/W除了电机本身质量以外的总运动质量。
倾斜角。
水平轨道是0度,垂直轨道是90度。
您预计的应用中摩擦力总量。
应考虑到一切因素,从轴承到电缆链。
您连接到伺服放大器的电源电压。
这个值表示标准的AC电压,把它乘以√2就得到母线电压。
如果电源电压超过了所选电机的最大允许电压时该框就变红。
另外,当母线电压的90%超过了所给的驱动任务,程序将提醒您。
同样,您也可以直接在该框输入母线电压Vdc。
提示:对于某些应用,用两个更小的电机去代替一个大电机也许更实惠或者更具效益。
您可以选择较小电机,把您的负载分成两份,然后得到电机性能的一个合理的好的近似。
2.3 运动曲线(Movement Profiles)在这您可以描述电机在应用中需要运行的运动曲线(下图红色框所示)。
有10种不同的轮廓类型,其中有一个“stop”轮廓,您可以用它来限定您应用的整个运动曲线。
可以用20个运动轮廓来组成一个运动周期,虽然大部分应用只需要一个或两个轮廓来仿真。
首先,您需要知道仿真产生的结果是以运动周期的一个无限环为基础的,这意味着如果您进行某个轮廓的仿真,程序将告诉您如果轮廓无限循环将会对电机参数的影响。
接着输入每个轮廓不同的参数,这个轮廓类型的参数是特定的,每个轮廓的输入框也许不同。
轮廓类型以及它们适合的场景如下:t3rd定位运动tsin2定位运动m3rd匀速msin2匀速a3rd加速斜坡(时间)asin2加速斜坡(时间)q3rd加速斜坡(推力)qsin2加速斜坡(推力)cons定速occ摆动轮廓stop标志着最后轮廓我们将在“轮廓类型”一节中深入探讨每个轮廓类型。
需要特别注意与运动曲线有关的两个设置:“Max Vdi in Volts”和“Load in Newtons”。
Max Vdi in Volts (最大Vdi ,单位V)这个参数是可选参数,会影响加加速度(jerk),这反过来会影响所用的母线电压。
请注意正弦平方(sin2)轮廓本质上显示非常低的加加速度值,实际上可以通过限制梯形轮廓的加加速度达到更低值。
因此,在大部分应用中选择正弦平方轮廓是更明智的。
当使用梯形加速度曲线轮廓时,最大加加速度相对的会变高。
如果您的系统刚性不够不能承受这个加加速度,系统将会共振,这会造成不稳定的控制环。
在一些控制器,Vdi是可选调整参数,可用来限制加加速度。
Load in Newtons(负载,单位N)注意要区分“运动曲线”一节中的“Load in Newtons”和“应用数据”一节中的“Moving Mass”。
“Moving Mass”参数是用来指定您将置换的实际负载的质量,而“Load in Newtons”参数是用来指定施加到应用中的额外的外部力。
这个力可以是任何力,如平衡物的重力,动子上一个弹簧的力。
如果“Load in Newtons”与动子自身的运动方向相反,则它也能是负数。
您需要分别指定运动周期中每个轮廓的“Load in Newtons”值。
在下边的平衡物例子中,“Load in Newtons”被施加在整个运动周期中,所以需要给每个轮廓输入同样的值。
而在弹簧的例子中,只有在运动周期的某个阶段,如当动子与弹簧接触后才有“Load in Newtons ”,所以不是所有的轮廓都有同样的“Load in Newtons ”值,而一些轮廓的值将为0。
2.4 怎样去创建一个运动周期一个运动周期由一个或多个运动轮廓紧跟着一个“stop ”轮廓组成。
有两个下拉框,您可使用它们去定义周期里的轮廓、轮廓数和轮廓类型。
当您选择最后一个轮廓并且把它的类型从“stop ”改为其它类型,在它之后将会自动创建一个新的轮廓。
把其中任意一个轮廓改为“stop ”,则它之后所有轮廓将被忽略,它就是周期里的最后一个轮廓。
在此例中用平衡物产生外部力,因为它的方向与动子引力相反,所以“Load in Newtons ”输入值是负值在此例中通过弹簧产生外部力,只有当弹簧与动子接触后才有力。
这意味着运动周期的那个特定阶段的轮廓才有“Load in Newtons ”值2.5 轮廓类型有四种普通轮廓形式:3rd order(梯形)、正弦平方(sin2)、匀速和摆动。
3rd order形式将把电机速度在轮廓中设置成一个梯形。
正弦平方形式将电机加速度和减速度设置成一个正弦。
您有四种方法去描述3rd order和正弦平方形式。
以下是每个轮廓类型的描述。
t3rd and tsin2这些轮廓将会使电机从静止开始加速,以恒定速度运动,然后减速到0m/s,以行程和运动时间为基础。
当您需要电机从A移到B,并且最大速度不重要时,可以用这些轮廓。
m3rd and msin2这些轮廓将使电机从静止开始加速,以恒定速度运动,然后减速到0m/s,以行程、最大速度和加速推力为基础。
当您需要电机以指定的最大速度从A移到B时,可以用这些轮廓。
a3rd and asin2这些轮廓只能定义一个斜坡,例如加速或着减速到指定速度,以加速时间为基础。
q3rd and qsin2这些轮廓只能定义一个斜坡,例如加速或减速到指定速度,以加速推力为基础。
cons这个轮廓使电机在指定时间以恒定速度运动。
stop这总是运动周期的最后一个轮廓。
它告知程序在不断重复周期前仿真所有的轮廓。
提示:因为3rd、sin2、q3rd和qsin2轮廓只能使用一个斜坡,要么加速要么减速,所以您需要至少两个这样的轮廓去组成一个完整的运动。
您也可以把这些轮廓与“cons”组合去使电机以恒定的速度移动一定的距离。
提示:您可以使用cons轮廓去定义整个运动周期剩下的阶段,简单输入0m/s的最大速度并指定持续时间。
在对于电机来说压力重的应用,在周期中这样定义剩下的阶段是重要的,因为这样让电机有机会去冷却。
3.0 仿真3.1 运行仿真在选择电机,定义应用数据和运动周期后,就可以按下界面底部的“Start Simulation ”按钮运行仿真,这样就打开了结果显示画面。
结果显示画面分为四个单独部分。
仿真结果显示画面图表区域此区域显示所选数据与时间之间对应关系图,所有的结果数据是国际标准单位。
结果(Results )此部分显示的是关于运动周期和应用数据的计算结果。
从上往下的值分别为:∙ Peak force (N)——峰值推力(N)∙ Continous force (N)——连续推力(N)点击图形上的任意一处选择一点,当鼠标移到到这点附近时会显示该点的坐标,即与时间对应的实际值∙Maximum electrical power (W)——最大电功率(W)∙Minimum electrical power (W)——最小电功率(W)∙Dissipated power in coils and track (W)——动子和轨道的耗散功率(W)∙Temperature of motor housing (°C)——电机外壳温度(°C)∙Dissipated power in brake resistor (W)——制动电阻的耗散功率(W)∙Peak voltage (V)——峰值电压(V)∙Bus voltage (V)——母线电压(V)∙Peak current (A)——峰值电流(A)∙Continuous current (A)——连续电流(A)操作按钮首先在主界面选择一个参数,您可以使用箭头按钮以10%比率去增加或减少该参数值,仿真结果会对应更新。
这样可以轻松试验应用中的不同变化。
数据曲线选择您可以通过点击相应的按钮选择您想要显示在图表区域的数据曲线。
数据曲线如下:Move与时间对应的电机位置Speed与时间对应的电机速度Acc与时间对应的电机加速度Jerk与时间对应的加加速度Force与时间对应的电机产生的推力Power与时间对应的电机能耗(W)Voltage与时间对应的相间电压Current与时间对应的电机电流消耗Temp与时间对应的电机动子的热性能F/V这显示两个曲线。