清华大学大物 ppt课件
2024版(推荐)《大学物理》ppt课件

2024/1/27
1
目
CONTENCT
录
2024/1/27
• 课程介绍与教学目标 • 力学基础 • 热学基础 • 电磁学基础 • 近代物理初步 • 实验方法与技能培养 • 课程总结与展望
2
01
课程介绍与教学目标
2024/1/27
3
《大学物理》课程简介
课程性质
大学物理是理工科学生必修的一门基础课程,旨在培 养学生掌握物理学基本概念、原理和方法。
实验操作
熟练掌握实验仪器的使用方法和操作技巧,保证 实验的顺利进行。
数据处理和分析
对实验数据进行处理和分析,提取有用信息,得 出结论。
2024/1/27
36
典型实验案例分析与讨论
01
02
03
04
案例一
牛顿第二定律的验证。通过气 垫导轨上滑块的运动,验证牛 顿第二定律,加深对力和运动 关系的理解。
案例二
角动量守恒定律 内容、条件及应用
10
功和能
功的定义和计算
恒力做功、变力做功的计算方法
动能定理
内容、表达式、意义及应用
势能的概念和计算
重力势能、弹性势能等势能的计算方法
机械能守恒定律
内容、条件及应用
2024/1/27
11
03
热学基础
2024/1/27
12
温度与热量
温度的定义和单位
温度是表示物体冷热程度的物 理量,其单位是摄氏度(°C) 或华氏度(°F)。
加深对物理概念和规律的理解
通过实验现象的观察和分析,帮助学生加深对物理概念和规律的理解,提高物理素养。
2024/1/27
清华大学大物PPT课件

讨 (k 0,1,2,)
论 (2) N 2k' π
(k' kN, k' 1,2,)
i A4 A5
O A6
A0
A3
A2
A1
x
第38页/共46页
x A cost
1
0
x A cos(t )
2
0
x 3 A0 cos(t 2)
xN A0 cos[t (N 1)]
π
3
v0 0
π
3
A
π 3
x/m
0.08 0.04 o 0.04 0.08
第26页/共46页
π
x
3 0.08
cos(π
t
π)
23
可求(1)t 1.0 s, x, F
t 1.0 s 代入上式得 x 0.069 m
F kx m 2x 1.70 103 N
m 0.01 kg
0.08 0.04
讨论 ➢ 相位差:表示两个相位之差
(1)对同一简谐运动,相位差可以给出 两运动状态间变化所需的时间.
x1 Acos(t1 ) x2 Acos(t2 )
(t2 ) (t1 )
t
t2
t1
第20页/共46页
x
Aa
A2
b
o A v
t A
tb
x o A ta A
2
π 3
t π 3T 1 T 2π 6
2k π
2
1
第34页/共46页
(2)相位差 2 1 (2k 1) π(k 0,1,)
x
x
A A1 A2
A1
2 o
o
2 Tt
大学物理ppt课件完整版

03
计算机模拟和仿真
利用计算机进行数值模拟和仿真 实验,验证理论预测和实验结果 。
2024/1/25
5
物理学的发展历史
01
02
03
古代物理学
以自然哲学为主要形式, 探讨自然现象的本质和规 律,如古希腊的自然哲学 。
2024/1/25
经典物理学
以牛顿力学、电磁学等为 代表,建立了完整的经典 物理理论体系。
固体的电子论
介绍了能带理论、金属电子论、半导体电子 论等。
30
核物理和粒子物理基础
原子核的基本性质
包括核力、核子、同位素等基本概念。
放射性衰变
阐述了α衰变、β衰变、γ衰变等放射性衰变过程及 其规律。
粒子物理简介
介绍了基本粒子、相互作用、粒子加速器等基本 概念。
2024/1/25
31
THANKS
感谢观看
19
恒定电流的电场和磁场
恒定电流:电流大小和方 向均不随时间变化的电流 。
2024/1/25
毕奥-萨伐尔定律:计算 电流元在空间任一点产生 的磁场。
奥斯特-马可尼定律:描 述电流产生磁场的规律。
磁场的高斯定理和安培环 路定理:揭示磁场的基本 性质。
20
电磁感应
法拉第电磁感应定律
描述变化的磁场产生感应电动势的规律。
01
又称惯性定律,表明物体在不受外力作用时,将保持静止状态
或匀速直线运动状态。
牛顿第二定律
02
又称动量定律,表明物体加速度与作用力成正比,与物体质量
成反比。
牛顿第三定律
03
又称作用与反作用定律,表明两个物体间的作用力和反作用力
总是大小相等、方向相反、作用在同一直线上。
大学物理PPT完整全套教学课件pptx(2024)

匀速圆周运动的实例分析
3
2024/1/29
13
圆周运动
2024/1/29
01
变速圆周运动
02
变速圆周运动的特点和性质
03
变速圆周运动的实例分析
14
相对运动
2024/1/29
01 02 03
参考系与坐标系 参考系的选择和建立 坐标系的种类和应用
15
相对运动
2024/1/29
相对速度与牵连速度 相对速度的定义和计算
2024/1/29
简谐振动的动力学特征
分析简谐振动的动力学特征,包括回复力、加速度 、速度、位移等物理量的变化规律。
简谐振动的能量特征
讨论简谐振动的能量特征,包括动能、势能 、总能量等的变化规律,以及能量转换的过 程。
32
振动的合成与分解
2024/1/29
同方向同频率简谐振动的合成
分析两个同方向同频率简谐振动的合成规律,介绍合振动振幅、合 振动相位等概念。
5
大学物理的研究方法
03
观察和实验
建立理想模型
数学方法
物理学是一门以实验为基础的自然科学, 观察和实验是物理学的基本研究方法,通 过实验可以验证物理假说和理论,发现新 的物理现象和规律。
理想模型是物理学中经常采用的一种研究 方法,它忽略了次要因素,突出了主要因 素,使物理问题得到简化。
数学是物理学的重要工具,通过数学方法 可以精确地描述物理现象和规律,推导物 理公式和定理。
2024/1/29
适用范围
适用于一切自然现象,包括力学、热学、电磁学 、光学等各个领域。
应用举例
热力学第一定律、机械能守恒定律、爱因斯坦的 质能方程等。
清华大学大学物理课程讲义51页PPT
6、法律的基础有两个,而且只有两个……公平和Байду номын сангаас用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
拉
60、生活的道路一旦选定,就要勇敢地 走到底 ,决不 回头。 ——左
56、书不仅是生活,而且是现在、过 去和未 来文化 生活的 源泉。 ——库 法耶夫 57、生命不可能有两次,但许多人连一 次也不 善于度 过。— —吕凯 特 58、问渠哪得清如许,为有源头活水来 。—— 朱熹 59、我的努力求学没有得到别的好处, 只不过 是愈来 愈发觉 自己的 无知。 ——笛 卡儿
2024版年度《大学物理》全套教学课件(共11章完整版)

01课程介绍与教学目标Chapter《大学物理》课程简介0102教学目标与要求教学目标教学要求教材及参考书目教材参考书目《普通物理学教程》(力学、热学、电磁学、光学、近代物理学),高等教育出版社;《费曼物理学讲义》,上海科学技术出版社等。
02力学基础Chapter质点运动学位置矢量与位移运动学方程位置矢量的定义、位移的计算、标量与矢量一维运动学方程、二维运动学方程、三维运动学方程质点的基本概念速度与加速度圆周运动定义、特点、适用条件速度的定义、加速度的定义、速度与加速度的关系圆周运动的描述、角速度、线速度、向心加速度01020304惯性定律、惯性系与非惯性系牛顿第一定律动量定理的推导、质点系的牛顿第二定律牛顿第二定律作用力和反作用力、牛顿第三定律的应用牛顿第三定律万有引力定律的表述、引力常量的测定万有引力定律牛顿运动定律动量定理角动量定理碰撞030201动量定理与角动量定理功和能功的定义及计算动能定理势能机械能守恒定律03热学基础Chapter1 2 3温度的定义和单位热量与内能热力学第零定律温度与热量热力学第一定律的表述功与热量的关系热力学第一定律的应用热力学第二定律的表述01熵的概念02热力学第二定律的应用03熵与熵增原理熵增原理的表述熵与热力学第二定律的关系熵增原理的应用04电磁学基础Chapter静电场电荷与库仑定律电场与电场强度电势与电势差静电场中的导体与电介质01020304电流与电流密度磁场对电流的作用力磁场与磁感应强度磁介质与磁化强度稳恒电流与磁场阐述法拉第电磁感应定律的表达式和应用,分析感应电动势的产生条件和计算方法。
法拉第电磁感应定律楞次定律与自感现象互感与变压器电磁感应的能量守恒与转化解释楞次定律的含义和应用,分析自感现象的产生原因和影响因素。
介绍互感的概念、计算方法以及变压器的工作原理和应用。
分析电磁感应过程中的能量守恒与转化关系,以及焦耳热的计算方法。
电磁感应现象电磁波的产生与传播麦克斯韦方程组电磁波的辐射与散射电磁波谱与光子概念麦克斯韦电磁场理论05光学基础Chapter01光线、光束和波面的概念020304光的直线传播定律光的反射定律和折射定律透镜成像原理及作图方法几何光学基本原理波动光学基础概念01020304干涉现象及其应用薄膜干涉及其应用(如牛顿环、劈尖干涉等)01020304惠更斯-菲涅尔原理单缝衍射和圆孔衍射光栅衍射及其应用X射线衍射及晶体结构分析衍射现象及其应用06量子物理基础Chapter02030401黑体辐射与普朗克量子假设黑体辐射实验与经典物理的矛盾普朗克量子假设的提普朗克公式及其物理意义量子化概念在解决黑体辐射问题中的应用010204光电效应与爱因斯坦光子理论光电效应实验现象与经典理论的矛盾爱因斯坦光子理论的提光电效应方程及其物理意义光子概念在解释光电效应中的应用03康普顿效应及德布罗意波概念康普顿散射实验现象与经德布罗意波概念的提典理论的矛盾测不准关系及量子力学简介测不准关系的提出及其物理量子力学的基本概念与原理意义07相对论基础Chapter狭义相对论基本原理相对性原理光速不变原理质能关系广义相对论简介等效原理在局部区域内,无法区分均匀引力场和加速参照系。
清华大学 大学物理 普通物理 课件3光偏振
不相干
没有优势方向
自然光的分解
一束自然光可分解为两束振动方向相互
垂直的、等幅的、不相干的线偏振光。
Ex Ey
自然光的表示法:
IIxIy2Ix
·
·
·
5
三、部分偏振光
自然光和完全偏振光的混合,就构成了部分
偏振光。
部分偏振光可看成是自然光和线偏振
光的混合,
天空中的散射光和水面的反射光
就是这种部分偏振光,
d
光轴
光轴
Ae
1、四分之一波(晶)片(quarter-wave plate)
厚度满足
neno d 4
π 2
可从线偏振光获得椭圆或圆偏振光(或相反)
偏光分束棱镜:
可由自然光获得分开的两束线偏振光
沃拉斯顿棱镜
·
2 方解石 1o
o
· ·· ·
··
光轴
e
e·
·
方解石
光进入到第1块方解石后,o光和e光在方向上 光轴 没有分开。
由于方解石2和方解石1二者光轴垂直,当光进入到方解石2时,o 光变成e光(no>ne):光密光疏;而e 光变成o 光:光疏光密
16
二、玻璃片堆起偏和检偏
1、起偏:
i i 当 时反射光是线偏振的,可用来起偏。 0
但单次反射的反射光强太低(只占15%),而且方向发生变化,使用不方便。因此更多利用 起偏,并采用玻璃片堆增大透射光的偏振度。
i i0
时的折射光
·
··
·
· ·
i0
线偏振光
·
· · ·· · ·
·
·
·
·
· ·
·
·
清华大学自用 大学物理一 教学课件第八章 电势
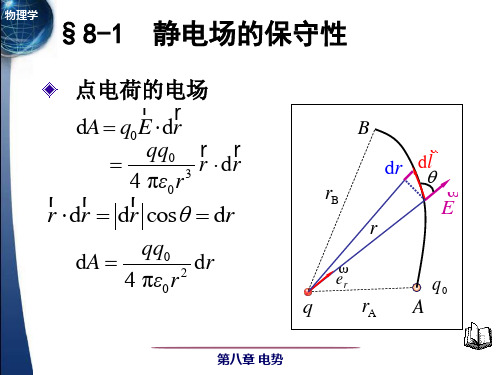
Epa
a
qo
v E
drr
注意:
• 电势能为电场和位于电场中的电荷这个系统所 共有。
• 电势能是标量,可正可负。
电势能的大小是相对的,电势能的差是绝对的.
第八章 电势
物理学
vr
AAB q0
E dr
AB
(EpB
EpA )
令 A EpA / q0 A点电势,B EpB / q0 B点电势
d dq
4 πε0r
A
4
1 πε0
dq r
dq
r
A
电势叠加原理: 点电荷系电场中任一点的电势,等于各个
点电荷单独存在时在该点处的电势之代数和。
第八章 电势
物理学
计算电势的方法
(1)电势叠加法 利用点电荷电势的叠加原理
4
1 πε0
dq r
第八章 电势
物理学
例 正电荷q均匀分布在半径为R的细圆
状态a
假设 q1 q2初始时相距无限远
q1 r q2
q1 不动 q2 从无穷远处移至r处做功为
Ar
r F
drr
q1q2
r
4 0 r
q11 q22
1 2
(q11
q22
)
第八章 电势
物理学
三个点电荷
W互 q2 (21 23 ) q331
q1q2 q3q2 q1q3
V2
第八章 电势
物理学
例 真空中一半径为a,带电量为Q 的均匀球体的静电场能。
Qa
解:
清华大学大学物理课程讲义PPT课件

31
“ 怒 发 冲. 冠 ”
32
二. 电通量e
定义:
Φe
Eds
S
1.Фe是对面而言,不是点函数。
S
2.Фe 是代数量,有正、负。
ds
Φ e 的几何 意义:
d Φ e E d s E co d s s
EdsdN
cos ds=ds E 线 对Φ 闭e合曲N ( 面,Φe穿 S的 E E线 过 ds 条
.
24
几种电荷的 E线分布
带正电的 点电荷
电偶极子
.
均匀带电 的直线段
25
几种电荷的 E线分布的实验现象
单个点. 电 极
26
正 负 点. 电 极
27
两 个 同 号 的. 点 电 极
28
单 个 带 电. 平 板 电 极
29
正 负 带 电 平. 行 平 板 电 极
30
正 点 电 极 和 .负 平 板 电 极
.
6
二. 点电荷的场强(intensity of point charge)
·
E p ×场点
r
q “源”点电荷 (相对观测者静止)
由库仑定律和电场 强度定义给出:
E
q
4
er
or2
点电E荷 分布 . 特E点 r1: 2 7
三.
······ q1
点q2 电rEi 荷× p系Ei的场电由强荷叠q加i E的原 场理强,i:总4E场qi i强eor:ri4i2qieorri i2
已知:均匀带电环面, ,R1,R2
R2
求:轴线上的场强 E
P
解:─
0 R1
x x(1)划分电荷元
dqds
清华大学大学物理经典课件——电势-PPT课件

q q 2 2 4 r 4 0 R x
0
【例】两同心带电球 面,求 A,B,C 点的 电势。
q2
A B rA
q1
R2
单独在该点的电势的和!
rB rC C
R1
q q q q 1 2 1 2 U = U + U A 1 A 2 A 4 r r r 0 A 4 0 A 4 0 A q q 1 2 U = U + U = B 1 B 2 B 4 r R 0 B4 0 2 q q 1 2 U = U + U = C 1 C 2 C 4 R R 0 1 4 0 2
电磁学(第三册)
第3章 电势
陈信义编
1
目
录
§3.1 静电场的保守性 §3.2 电势差和电势 §3.3 电势叠加原理 §3.4 电势梯度 §3.5 电荷在外场中的静电势能 §3.6 电荷系的静电能 §3.7 静电场的能量 补充:静电场环路定理的微分形式
【演示实验】高压带电操作、电容器储能
2
§3.1 静电场的保守性 一、静电场是保守场
18
§3.4 电势梯度 一、等势面 电势相等的点组成的曲面。 等势面特征: 1、电场线与等势面处处正交,并指向电势 降低的方向。 2 、 两等势面相距较近处的场强大,相距 较远处场强较小。
0 R
r0
电势零点不能选在无限远!
14
§3.3 电势叠加原理 在电荷体系的电场中,某点电势等于各电 荷单独在该点产生的电势的代数和
U Ui
i
注意:各电荷的电势零点必须相同。
应用电场叠加原理证明 : E Ei
i
p U ( p ) d r d r U p ) i i( E E
大学物理学(第二版)全套PPT课件
万有引力定律
任意两个质点通过连心线方向上的力相互吸引。 该引力大小与它们质量的乘积成正比与它们距离 的平方成反比。
机械能守恒定律
在只有重力或弹力做功的物体系统内(或者不受 其他外力的作用下),物体系统的动能和势能( 包括重力势能和弹性势能)发生相互转化,但机 械能的总能量保持不变。
04
动量守恒与能量守恒
热力学第二定律
热力学第二定律的表述
不可能从单一热源取热,使之完全转换为有用的功而不产生其他影响。
热力学第二定律的数学表达式
对于可逆过程,有dS=(dQ)/T;对于不可逆过程,有dS>(dQ)/T,其中S表示熵,T表 示热力学温度。
热力学第二定律的应用
热力学第二定律揭示了自然界中宏观过程的方向性,指出了与热现象有关的实际宏观过 程都是不可逆的。同时,它也提供了判断这些过程进行方向的原则。
刚体的定轴转动中的功与能
转动功
力矩在转动过程中所做的功叫做“转动功”,它等于力矩与角位 移的乘积。
转动动能
刚体定轴转动的动能叫做“转动动能”,它等于刚体的转动惯量与 角速度平方的一半的乘积。
机械能守恒
在只有重力或弹力做功的情况下,刚体的机械能守恒,即动能和势 能之和保持不变。
06
热学基础
温度与热量
磁场的基本概念
01
磁场的定义
磁场是一种物理场,由运动电荷或电流产生,对放入其中的磁体或电流
有力的作用。
02
磁感线
用来形象地表示磁场方向和强弱的曲线,磁感线上某点的切线方向表示
该点的磁场方向。
03
磁场的性质
磁场具有方向性、强弱性和空间分布性。
安培环路定理与毕奥-萨伐尔定律
01
清华大学自用 大学物理一 教学课件第九章 静电场中的导体

σE
第九章 静电场中的导体
物理学
第九章 静电场中的导体
物理学
< 电风实验 >
++ +++
+ +
++ +
第九章 静电场中的导体
物理学
第九章 静电场中的导体
物理学
避雷针的工作原理
+ +
+ +带+电云+ +
板间距远小于平板的线度。求平板各表面的电荷密度。
解:
1S 2S q1
电荷守恒: 3S 4S q2
q1
q2
由静电平衡条件,导体板内E = 0
EA
1 2 o
2 2 o
3 2 o
4 2 o
0
1 2 3 4
EB
1 2 O
2 2 O
物[理例学题12-2] 无限大的带电平面的场中
平行放置一无限大金属平板求:金属 板两面电荷面密度。
1 2
P 2 0
解: 设金属板面电荷密度 1, 2
2
1
2 0
2 0
由对称性和电量守恒
x
1 2
导体体内任一点P场强为零
1
1 2
1 2 0 20 20 20
S4 E4 dS ε0
E4
4
2q π ε0r2
(r R1)
S4
R1
2q
清华大学 大学物理ppt课件
解:(1)在飞船上看卫星的速度
设地面为 S 系,飞船为 S 系
S
S
飞船
u = 0.6c v = -0.8c
x
卫星
x
如图示 根据洛伦兹速度变换
v
v 1
u
u c2
v
0.8c 0.6c 0.6c
1 c2 0.8c
0.946c (沿 -x 方向)
小于光速 c。
12
(2)飞船上看 再经过多少时间相撞?
相对论习题讨论课
关键是弄清一些基本概念: 1.同时性的相对性 2.运动时钟变慢效应 3.运动尺子收缩效应 4.能量、动能及能量动量关系
1
1.(指导P.45,2)一火车以恒定速度通过隧道,火车和 隧道的静长相等。
从地面看,当火车的前端到达隧道的右端的同时, 有一道闪电击中隧道的左端。
试问此闪电能否在火车的后端留下痕迹?
事件1:地面发现飞船 事件3:地面发现卫星
S
S
飞船
u = 0.6c
x1
x
v = -0.8c
卫星
x3
x
17
S
S
飞船
u = 0.6c
x1
x
v = -0.8c
卫星
x3
x
事件1:地面发现飞船 事件3:地面发现卫星
在地面系中 事件1、3的距离是:
l x31 x3 x1 (0.6c 0.8c) 5s 7c s
解法1 常规的做法
1)建坐标 确定事件
事件1 飞船经地面P1处 事件2 两者相撞在地面的P2处 事件3 卫星经地面P3处
S
地 面
s飞船
u 0.6c
P1 P2 P3 13
清华大学自用 大学物理一 教学课件第十一章 恒定电流PPT精品文档22页
vvvv lE k d l i n E k d l
电源电动势大小等于将单位正电荷从负 极经电源内部移至正极时非静电力所作的功.
第10章 稳恒电流和电动势
18
物理学 §10.3 有电动势的电路
从点A出发 , 顺时针 绕行一周各部分电势降
落总和为零 , 即 ld U lE d l 0
C* R D*
欧姆定律不成立,这种非欧姆导电特性有很大的 实际意义,在电子技术,电子计算机技术等现代 技术中有重要作用.
第10章 稳恒电流和电动势
13
物理学
§10.2 电源 电动势
第10章 稳恒电流和电动势
14
物理学
+
+
+
E
+
A B
+
+
+
E
+
A B
电源:提供非静电力的装置
第10章 稳恒电流和电动势
15
物理学
外电路:电源外部的电路, 电流从高电势向低电势运动。
内电路:电源内部正、负两极 I
之间的电路,电荷在非静电场 力的作用下克服静电场力作功,
R
+ E-
++-
从低电势向高电势运动。
非静电电场强度
Ek :
为单位正电荷所受的非静电力.
蜒 vvv vv
A lq ( E k E ) d l lq E k d l
r J
的大小,
方向Jr
该点正电荷运 动方向
大小:单位时间内过该 点且垂直于正电荷运动 方向的单位面积的电荷
r J
qnuv
第10章 稳恒电流和电动势
3
物理学
大学物理PPT完整全套教学课件

温标的选择
在热力学中,常用的温标有摄氏 温标、华氏温标和热力学温标。 其中,热力学温标以绝对零度为 起点,与热量传递的方向无关, 因此更为科学。
热力学第一定律
01
热力学第一定律的表述
热量可以从一个物体传递到另一个物体,也可以与机械能 或其他能量互相转换,但是在转换过程中,能量的总值保 持不变。
02
质点运动的描述
01 位置矢量与位移
02
位置矢量描述质点在空间中的位置,位移是质点位置
的变化量
03
位移是矢量,具有大小和方向,其方向与从初位置指
向末位置的有向线段一致
质点运动的描述
速度与加速度 速度是质点运动的快慢程度,加速度是速度变化的快慢程度 速度和加速度都是矢量,具有大小和方向
圆周运动
圆周运动的描述
能量守恒定律
能量守恒定律的表述
能量既不会凭空产生,也不会凭空消失,它只会从一种形式转化为另一种形式,或者从 一个物体转移到其它物体,而能量的总量保持不变。
能量守恒定律的适用范围
无论是宏观世界还是微观世界,无论是低速运动还是高速运动,能量守恒定律都适用。
能量守恒定律的数学表达式
ΔE = W + Q,其中ΔE表示系统内能的增量,W表示外界对系统做的功,Q表示系统吸 收的热量。
通过牛顿运动定律可以预测物体 在受力后的运动状态,为物理学 研究提供基础。
非惯性系中的力学问题
01
非惯性系定义
02
惯性力概念
相对于地面做加速或减速运动的参考 系称为非惯性系。
在非惯性系中,为了解释物体的运动 ,需要引入一种假想的力,即惯性力 。
03
非惯性系中牛顿运动 定律的应用
在非惯性系中,牛顿运动定律仍然适 用,但需要考虑惯性力的影响。例如 ,在旋转的参考系中,物体受到的惯 性力会导致其偏离原来的运动轨迹。
清华大学-大学物理力学课件 (2)
§4.3 一对力的功
系统内力总是成对出现
r 1
B1
f
1
r
B2
r
21
f
r
2
2
W f1 r1 f2 r2 f 2 (r2 r1 ) f 2 r21
一对力所做的功,等于
1
r 2
A1
A2
其中一个物体所受的力 沿两个物体相对移动的 路径所做的功。
O
m
R
M
上一例,内力与相对位移 总垂直,故内力所做的功 总和为零。
面密度 s M 4R2s
M环 2R sinq Rq s
EP
G
mM r
m
r1 r
q
q
R o
r1 r
r1 j90o
j
q q
R
E P环
G
m
s
2R2
r1
s i nqq
r r1
si nj si nq si nj r si nq
r1
r1 Rq sinj
r1 (r R r R)
E P环
G
m s 2Rr1
水平方向无外力,系统保持 水平方向动量守恒。
mv MV 0
W重力
W内力
1 2
MV 2
1 2
mv2
对M,内力所做的功 1 MV 2 m2v 2
2
2M
对m,内力所做的功 1 mv 2 mgR 2
* 本例中实际内力对两个物体分别所做功互相抵消。
质心系
E K
i
1 2 mi (vi
vc )2
2
ri
fi
A
B
w AB
B f dr
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x 1 A 1 co 1 t A s 1 c2 o π1 ts xxx
x A co t A sc2 o πts
1
2
22
2
2
2
讨论 A1 A2 ,21 12 的情况
方法一
x x 1 x 2 A 1 c2 π o 1 t A s 2 c2 π o 2 ts
x (2 A 1 c2 o πs 22 1t)c2 o πs 22 1t
Fma m 2x kx
3、能量特征
l0 k
m
x
A
o
A
FkxEp(x)1 2k2 x
作简谐运动的系统是保守系统:势能为二次方
形式,机械能守恒.
简谐运动能量守恒
E1m2v1k2 x1kA 2
2
2
2
简谐运动势能曲线
Ep
C
E
B
Ek
Ep
A
O x A x
推导
能量守恒
简谐运动方程
E1mv21kx2 常量 22
A
oA1
A2
A3
A4
A5
x
3 0
AAi NA 0
x N A 0 co t ( s N [ 1 ) ]
i
讨 论
(1) 2kπ
(k 0 , 1 , 2 , )
(2) N2k'π
A4 A5
O
( k ' k,k N ' 1 , 2 , )A0A6
A3
A2
A1
x
xAcost
1
0
x 2A 0cot s ()
x 3 A 0cot s2 ()
x N A 0 co t ( s N [ 1 ) ]
xAcots()
sin( N )
A A0 sin(
2 )
2
N 1
2
3 两个同方向不同频率简谐运动的合成
频率较大而频率之差很小的两个同方 向简谐运动的合成,其合振动的振幅时而 加强时而减弱的现象叫拍.
(3)用旋转矢量 A 与ox轴夹角表示相位,
不仅相位计算方便,而且有助于对相位概 念的理解 (4)旋转矢量为振动合成提供了直观的几 何方法
讨论 ➢ 相位差:表示两个相位之差
(1)对同一简谐运动,相位差可以给出 两运动状态间变化所需的时间.
x1A co t1 s () x2A co ts 2 ()
( t2 ) ( t1 )
振幅部分
合振动频率
振动频率 (12)2
振幅
A2A1co2sπ 2
1t
2
Amax2A1 Amin0
x (2 A 1 c2 o πs 221t)c2 o πs 221t
2π 2
1
T
π
2
T 1
2 1
21
拍频(振幅变化的频率)
(2)由起始位置运动到x = -0.04 m处所需 要的最短时间.
t 时刻
起始时刻
t
π3
π3
x/m
0.080.04 o 0.04 0.08
t π π rads1 t 20.667s
3
2
3
例2:根据运动曲线确定相位
例2、已知物体作简谐运动的 图线,试根据图线写出其振动方程
xm
0.04
0.02
A
A2
x1A1cost
x (A A )cot sπ() 21
x 2A 2cots π ()
小结
(1)相位差 212kπ (k0, 1 , )
AA1A2
加强
(2)相位差 21(2k1 )π(k0, 1 , )
AAA
1
2
减弱
(3)一般情况
A 1A 2A A 1A 2
*2 多个同方向同频率简谐运动的合成
x
超前
π反相 为其它 落后
x
x
o
o
o
t
t
t
一维简谐运动
xA co ts
v A si n t
Acost
2
a 2A co t s
y
avor t A x
2A co t s
例1:根据运动状态确定相位 例 1 一质量为0.01 kg的物体作简谐运动,
其振幅为0.08 m,周期为4 s,起始时刻物体在 x=0.04 m处,向ox轴负方向运动(如图).试求
d(1mv21kx2)0 dt 2 2
mvdvkxdx0 dt dt
d2x k x 0 dt2 m
二、简谐运动的特征量
xA co ts
1、圆频率
2、振幅 A
3、初相位
k m
E1k2x1m2v1kA 2 22 2
相位
(t)t
x A c o t s A c os
v A sit n A s in
例子:一维简谐的机械振动
xA co ts
vdxAsint
dt
ad2x2Aco ts2x
d2t
图示 xt,vt,at等图线 ( 0)
x
o
t
v
o
t
a
o
t
2、动力学特征
a x d d22 xt 2A co ts 2x Fma m 2x kx 线性回复力
x 2x0
k m
振动的成因: 回复力+惯性
1、旋转矢量
t 0
o
自Ox轴的 原点
O作一矢量 A ,使 它的模等于振动的
振幅A,并使矢量A
A 在 Oxy平面内绕点
O作逆时针方向的
x 0
x 匀角速转动,其角
x0Acos
速度 与振动频率
相等,这个矢量就
叫做旋转矢量.
A
t t
t
o
x
xAcots()
点旋以转o 矢为量原A
的端点在 x轴
上的投影点的
运动为简ቤተ መጻሕፍቲ ባይዱ运
动.
xA co ts ()
点旋以转o 矢为量原A
的端点在 x轴
上的投影点的
运动为简谐运
动.
用旋转矢量图画简谐运动的xt图
2、旋转矢量法的应用
(1)旋转矢量端点在 ox轴上投影点的运
动,形象而直观地展示了简谐运动。
(2)旋转矢量把描述简谐运动的三个物理
量 (A,,t)直观地表示出来
相位Φ的意义: 表征任意时刻(t)物体 振动状态. 物体经一周期的振动,相位改变 2 .
人有悲欢离合,月有阴晴圆缺,此事古难全。
初相位 t0时 , (0)
xA co ts () 初始条件
v A sin t () t0xx0 vv0
tan v0 x0
sin v0
cos x0
A
A
对给定振动系统,圆频率、周期T、 频率由系统本身性质决定,振幅A和初相 由初始条件x=x0, v=v0决定.
代入 xA co ts ()
π
3
v0
0
π
3
A
π 3
x/m
0.080.04 o 0.04 0.08
π
x03.08coπst(π) 23
可求(1)t1.0s,x,F
t1.0s 代入上式得 x0.06m 9
F k x m 2x1.7 010 3N
m0.01kg v
x/m
0.08 0.04 o 0.04 0.08
角频率为
t 2
四、振动合成 1 两个同方向同频率简谐振动的合成 *2 多个同方向同频率简谐运动的合成
3 两个同方向不同频率简谐运动的合成
**4 两个相互垂直的同频率的简谐运 动的合成
1 两个同方向同频率简谐振动的合成
设一质点同时参与
两独立的同方向、同频
率的简谐振动:
xAco ts ()
1
1
1
x2A 2cot s2 ()
A2
2 1
0 x2
A1
x1 x
两振动的位相差 21=常数
xA co ts ()
A A 1 2A 2 22A 1A 2co2 s1)(xx1x2
A
x tanA A 11csio n1 1 s A A2 2scio n 22 s
A2
2
1
A1
0 x2 x1 x
讨论 已知 t0,x0,v00求
0Acos π
2
v 0 A si n 0
sin0取 π
x
2A
xAcos(t π)
2
o
A
v
x
o
xt图
Tt
T 2
三、简谐运动的几何表示:旋转矢量
代数表示
复数表示
xA co ts zAiet
图像表示
x xt图
A
o
Tt
T
A
2
矢量表示
A
t t
t
o
x
xAcots()
第九章
振动
前言 1、振动是物质的普遍运动形式
2、某物理量在某一值附近作周期性变化— 振动
机械振动:物体在某一位置附近作周期 往复运动
电磁振荡:电场、磁场随时间作周期性 变化
简谐运动 最简单、最基本的振动
简谐运动
合成 分解
复杂振动
傅里叶分析
一、简谐运动的 基本特征 1、运动学特征
物理量是时间的简谐函数(余弦或正弦)
x 1A 1cots (1)
x 2A 2cot s2 ()
x nA ncot sn ()
x x 1 x 2 x n
xA co ts ()
A
A3
3
A2
2
o 1 A1
x