ISO11898-1数据链路层和物理层信号
can总线的国际标准
can总线的国际标准CAN总线,全称为控制器局域网总线(Controller Area Network),是一种用于实时应用的串行通讯协议总线。
由于其高性能、高可靠性、以及灵活的通讯方式,CAN总线在工业自动化、船舶、医疗设备、航空航天等领域得到了广泛应用。
CAN总线的国际标准,具体为ISO 11898系列。
这一系列标准详细规定了CAN 总线的物理层、数据链路层以及应用层的规范。
1.物理层:ISO 11898-1至-3规定了CAN总线的物理层。
这部分标准主要定义了CAN总线的基本电气特性,如位速率、位编码、位同步等。
同时,这些标准还对CAN总线的物理接口,包括连接方式、信号幅度和阻抗等进行了规定。
2.数据链路层:ISO 11898-4至-7规定了CAN总线的数据链路层。
这部分标准主要定义了如何实现节点间的数据传输和错误检测。
标准中规定了如何使用标识符来标识信息,如何发送和接收数据,以及如何处理错误和故障等。
3.应用层:ISO 11898-8至-10规定了CAN总线的应用层。
这部分标准主要定义了如何实现节点间的信息交互和通讯控制。
标准中规定了如何定义通讯协议、如何进行信息交互、如何处理异常情况等。
此外,CAN总线还有几个子标准,包括CAN 2.0、CAN FD(快速数据)等。
这些子标准在原有的CAN总线基础上进行了扩展和改进,以适应更高的数据传输速率和更复杂的应用需求。
总的来说,CAN总线的国际标准为各种不同领域的应用提供了一个通用的通讯平台。
通过遵循这些标准,不同的设备和应用可以方便地实现相互之间的通讯和控制,从而提高了系统的效率和可靠性。
CAN总线信号可靠性测试系统方案设计

2020.27科学技术创新CAN 总线信号可靠性测试系统方案设计齐家敏耿煜程昊(湖北文理学院纯电动汽车动力系统设计与测试湖北省重点实验室,湖北襄阳441053)1概述CAN 总线是80年代德国BOSCH 公司为了解决汽车内部通讯而研发的一套局部短距离通讯协议,由于其高传输速率及可靠性,以及防爆特性而在汽车等众多领域获得了广泛的应用[1]。
多年来一直备受各个厂家的青睐,是目前最有前途的现场总线之一。
随着电子技术日新月异,速率越来越高,工况干扰越来越复杂,同时对CAN 总线抗干扰能力提出了越来越高的要求。
CAN 总线多用于工控和汽车领域,在CAN 总线的开发测试阶段,需要对其拓扑结构,节点功能,网路整合等进行开发测试,需要虚拟、半虚拟、全实物仿真测试平台,并且必须测试各节点是否符合ISO11898中规定的错误响应机制等。
CAN 总线测试主要包括物理层测试、数据链路层测试以及应用层测试,物理层测试主要测试CAN 总线的电气特性,数据链路层和应用层测试主要包括协议层测试及其抗干扰能力测试[2]。
根据ISO11898标准协议仅仅规定了物理层和数据链路层协议,应用层交给厂家根据自己的需求开发自己的应用层协议。
应用层协议现如今应用比较广泛的是特用于工厂自动化的Device Net 、适用于嵌入式工业局域网的CANOpen 和专门为大型货车和重工机械车辆设计J1939。
CAN 总线测试是依据ISO11898-1数据链路层标准和ISO11898-2物理层协议标准,针对CAN 总线的电气参数测试、协议兼容性测试、噪声抑制等测试,制定了ISO16845CAN 总线一致性测试标准,主要包括单向接收、单向发送以及双向通讯的测试目的、连接结构、测试内容和通过准则等内容的测试细则,可有效而全面地解决CAN 总线产品的一致性、有效性测试问题[3]。
ISO16845规定的CAN 总线一致性测试除了对总线产品进行正常功能的测试外,还应包括波形畸变、失真、注入错误、加入噪声等特殊条件的测试。
汽车CAN总线详解

汽车CAN总线详解概述CAN(Controller Area Network)总线协议是由 BOSCH 发明的⼀种基于消息⼴播模式的串⾏通信总线,它起初⽤于实现汽车内ECU之间可靠的通信,后因其简单实⽤可靠等特点,⽽⼴泛应⽤于⼯业⾃动化、船舶、医疗等其它领域。
相⽐于其它⽹络类型,如局域⽹(LAN, Local Area Network)、⼴域⽹(WAN, Wide Area Network)和个⼈⽹(PAN, Personal Area Network)等,CAN 更加适合应⽤于现场控制领域,因此得名。
CAN总线是⼀种多主控(Multi-Master)的总线系统,它不同于USB或以太⽹等传统总线系统是在总线控制器的协调下,实现A节点到B节点⼤量数据的传输,CAN⽹络的消息是⼴播式的,亦即在同⼀时刻⽹络上所有节点侦测的数据是⼀致的,因此⽐较适合传输诸如控制、温度、转速等短消息。
CAN起初由BOSCH提出,后经ISO组织确认为国际标准,根据特性差异⼜分不同⼦标准。
CAN国际标准只涉及到 OSI(开放式通信系统参考模型)的物理层和数据链路层。
上层协议是在CAN标准基础上定义的应⽤层,市场上有不同的应⽤层标准。
发展历史1983年,BOSCH开始着⼿开发CAN总线;1986年,在SAE会议上,CAN总线正式发布;1987年,Intel和Philips推出第⼀款CAN控制器芯⽚;1991年,奔驰 500E 是世界上第⼀款基于CAN总线系统的量产车型;1991年,Bosch发布CAN 2.0标准,分 CAN 2.0A (11位标识符)和 CAN 2.0B (29位标识符);1993年,ISO发布CAN总线标准(ISO 11898),随后该标准主要有三部分:ISO 11898-1:数据链路层协议ISO 11898-2:⾼速CAN总线物理层协议ISO 11898-3:低速CAN总线物理层协议注意:ISO 11898-2和ISO 11898-3物理层协议不属于 BOSCH CAN 2.0标准。
CAN_发展史
CAN发展史起源1986年2月,Robert Bosch 公司在SAE(汽车工程协会)大会上介绍了一种新型的串行总线——CAN 控制器局域网,那是CAN诞生的时刻。
今天,在欧洲几乎每一辆新客车均装配有CAN局域网。
同样,CAN 也用于其他类型的交通工具,从火车到轮船或者用于工业控制。
CAN已经成为全球范围内最重要的总线之一——甚至领导着串行总线。
在1999年,接近6千万个CAN控制器投入应用;2000年,市场销售超过1亿个CAN器件。
在1980年的早些时候,Bosch公司的工程师就开始论证当时的串行总线用于客车系统的可行性。
因为没有一种现成的网络方案能够完全满足汽车工程师们的要求,于是,在1983年初,Uwe Kiencke 开始研究一种新的串行总线。
新总线的主要方向是增加新功能、减少电气连接线,使其能够用于产品,而非用于驱动技术。
来自 Mercedes-Benz 的工程师较早制定了总线的状态说明,而Intel也准备作为半导体生产的主要厂商。
当时聘请的顾问之一是来自于德国Braunschweig-Wolfenbüttel的Applied Science大学教授Wolfhard Lawrenz博士给出了新网络方案的名字“Controller Area Network”,简称CAN。
来自Karlsruhe大学的教授Horst Wettstein博士也提供了理论支持。
1986年2月,CAN诞生了。
在底特律的汽车工程协会大会上,由 Bosch公司研究的新总线系统被称为“汽车串行控制器局域网”。
Uwe Kiencke、 Siegfried Dais 和 Martin Litschel 分别介绍了这种多主网络方案。
此方案基于非破坏性的仲裁机制,能够确保高优先级报文的无延迟传输。
并且,不需要在总线上设置主控制器。
此外,CAN之父——上述几位教授和Bosch公司的Wolfgang Borst、Wolfgang Botzenhard、Otto Karl、Helmut Schelling、Jan Unruh 已经实现了数种在CAN中的错误检测机制。
高速CAN与低速CAN-风丘科技

ISO11898标准 和 ISO11519标准ISO11898 和 ISO11519-2的不同点
高速CAN
低速CAN
CAN协议经ISO标准化后有ISO11898标准(高速CAN)ISO11519-2(低速CAN)标 准两种。
ISO11898标准和ISO11519-2对于 数据链路层的标准相同,但物理层不同。
2ISO11898标准是通信速度为125Kbps 以下的CAN低速通信标准。
ISO11519-2是ISO11519-1追加新规约后的版本ISO11519标准
1ISO11898 和 ISO11519-2在CAN协议中物理层的标准有所不同。
CAN协议的物理层定义了三个子层,ISO11898 和 ISO11519-2在物理层中的PMA层和MDI 层有所不同。
物理层的不同点
CAN协议定义的部分
CAN协议定义的部分ISO11898/11519-2标准化的部分
高速CAN和低速CAN的物理层电气特性不一样,因此不能将它们连接在一起
高速CAN主要应用在发动机、变速箱等对实时性、数据传输速度要求高的场合
低速CAN主要应用在对车身控制系统等对可靠性要求高的场合
CAN_H或CAN_L任意一根导线折断,高速CAN节点不能收发,但低速CAN节点可以接收。
因此低速CAN的可靠性高于高速CAN ,例如在发生事故时CAN线折断一根,车门控制器还可以接收CAN信号开门
通用汽车单线CAN(Single Wire CAN)和低速CAN应用一致低速CAN节点必须连接电源才能正常工作。
CAN总线

CAN总线上任意两个节点之间的最大传输距离与其位速率有关,表7.1列举了相关的数据。
表7.1 CAN总线系统任意两节点之间的最大距离
位速率/kbps
1000
500
250
125
பைடு நூலகம்100
50
20
10
5
最大距离/m
40
130
270
530
620
1300
3300
6700
10000
这里的最大通信距离是指在同一条总线上两个节点之间的距离。一个实际的影院系统网络结构中可以是“树型拓扑”(有时称为干线和支线)。在各级“分支”的节点上采用“网关”(可称为“中继器”或“网桥”),实际上就是由多个CAN控制器或外加其他通信协议的接口芯片组成的一个设备。这样几乎既不受限制地扩大了通信距离(“中继器”的作用),又有“网关”或“网桥”甚至“路由”的作用。
1)CAN遵从ISO/OSI模型,采用了其中的物理层、数据链路层与应用层。采用双绞线,通信速率最高达到1Mbps/40m,直接传输距离最远可达10KM/5kbps。最多可挂接110个设备。
2)CAN的信号传输采用短帧结构,每一帧有效字节数为8个。因而传输时间短,受干扰的概率低。当节点发生严重错误时,具有自动关闭的功能,切断该节点与总线的联系,使总线上其它节点不受影响,具有很强的抗干扰能力。
在20世纪90年代初,Bosch CAN规范(2.0版)被提出作为国际标准。经过几次争论,在1993年11月公布了CAN的ISO 11898标准。同时,在CAN的协议中定义了物理层的波特率最高为1MBPS。另外,CAN数据传送中的错误处理方式也在1995年的ISO11519-2中的标准化,ISO11898标准也由于加入了描述29位CAN的标识符而扩充。但是,所有公布的CAN规范和标准都有错误和不完整的地方。
诊断通讯协议总结
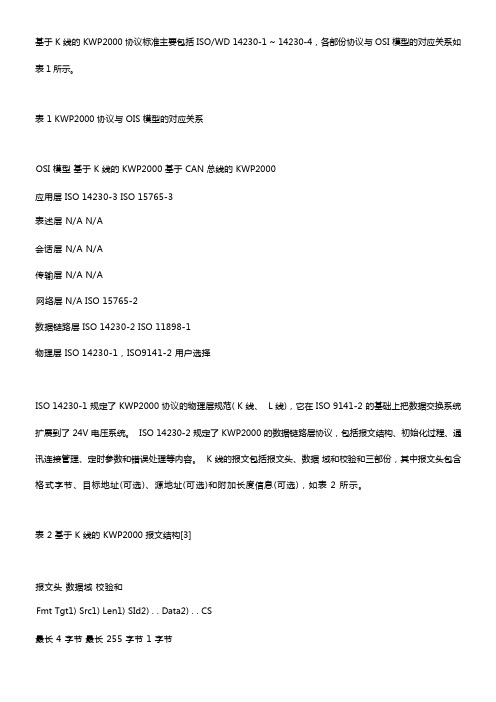
基于 K 线的 KWP2000 协议标准主要包括 ISO/WD 14230-1 ~ 14230-4,各部份协议与 OSI 模型的对应关系如表 1 所示。
表 1 KWP2000 协议与 OIS 模型的对应关系OSI 模型基于 K 线的 KWP2000 基于 CAN 总线的 KWP2000应用层 ISO 14230-3 ISO 15765-3表述层 N/A N/A会话层 N/A N/A传输层 N/A N/A网络层 N/A ISO 15765-2数据链路层 ISO 14230-2 ISO 11898-1物理层 ISO 14230-1,ISO9141-2 用户选择ISO 14230-1 规定了 KWP2000 协议的物理层规范( K 线、 L 线),它在 ISO 9141-2 的基础上把数据交换系统扩展到了 24V 电压系统。
ISO 14230-2 规定了 KWP2000 的数据链路层协议,包括报文结构、初始化过程、通讯连接管理、定时参数和错误处理等内容。
K 线的报文包括报文头、数据域和校验和三部份,其中报文头包含格式字节、目标地址(可选)、源地址(可选)和附加长度信息(可选),如表 2 所示。
表 2 基于 K 线的 KWP2000 报文结构[3]报文头数据域校验和Fmt Tgt1) Src1) Len1) SId2) . . Data2) . . CS最长 4 字节最长 255 字节 1 字节1 )可选字节,取决于格式字节 Fmt 的 A1A0 位2 )服务标识符( Service ID ),数据域的第 1 个字节KWP2000 ( Keyword Protocol 2000)是欧洲汽车领域广泛使用的一种车载诊断协议标准,该协议实现了一套完整的车载诊断服务,并且满足 E-OBD ( European On Board Diagnose)标准。
KWP2000 协议仅对其中三个子层进行了定义说明,即:应用层(第七层)、数据链路层(第二层)和物理层(第一层)。
直流充电设备通用技术规范-附件1 计费控制单元与充电控制器通信协议

计费控制单元与充电控制器通信协议1 范围本部分规定了计费控制单元与充电控制器之间基于控制器局域网(Control Area Network,以下简称CAN)的通信物理层、数据链路层、交互流程、报文分类、报文格式和内容的定义。
本部分适用于计费控制单元和充电控制器之间的通信。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 19596 电动汽车术语Q/GDW 11709.1-2017 电动汽车充电计费控制单元第1部分:技术条件IEC 60870-5-101 基本远动任务的配套标准(Transmission Protocols-Companion Standard for Basic Telecontrol Tasks)ISO 11898-1:2003 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road vehicle –Control area network (CAN) Part 1: Data link layer and physical signaling)SAE J1939-11:2006 商用车控制系统局域网CAN通信协议第11部分:物理层,250K比特/秒,屏蔽双绞线(Recommented practice for serial control and communication vehicle network Part 11: Physical layer–250K bits/s, twisted shielded pair)SAE J1939-21:2006 商用车控制系统局域网CAN通信协议第21部分:数据链路层(Recommented practice for serial control and communication vehicle network Part 21: Data link layer)3 术语和定义GB/T 19596、Q/GDW 11709.1-2017界定的以及下列术语和定义适用于本文件。
整车CAN网络设计规范

目次1范围 (2)2规范性引用文件 (2)3定义和术语 (2)4总体设计要求 (2)CAN总线架构详见图1。
(2)5总线拓扑 (3)6导线 (4)6.1导线的参数 (4)6.2双绞线在连接器处的绞缠要求 (4)7整车供电要求 (4)8总线故障管理 (4)8.1节点故障 (4)8.2开路和短路故障 (5)9周期型消息和混合型消息的周期偏差 (6)1范围本范规覆盖整车CAN网络盖物理层、数据链路层、交互层的相关要求。
本规范适用于汽车各车型。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO11898-1: 道路车辆-电控单元局域网(CAN)—第一部分:数据链路层和物理信号ISO11898-2: 道路车辆-电控单元局域网(CAN)—第二部分:高速介质访问单元ISO11898-5: 道路车辆-电控单元局域网(CAN)—第五部分:低功耗模式的高速介质访问单元SAE J2284-3: 500 Kbps下车辆用高速CANISO 15765-4: 道路车辆-控制局域网络诊断(CAN)—第四部分:排放相关系统要求3定义和术语下列术语和定义适用于本文件。
3.1术语的用法如下:“要求”:表示一种必须/强制的需求。
“应当”:表示一种推荐或建议。
“必须”:表示一种合法或标准的需求。
“将会”:表示一种预计的考虑情况,或者一种附加或可选的特性。
“可以”:表达一种被允许的行为或方法,并不认定为需求。
3.2缩写,缩写词、定义和符号4总体设计要求CAN总线架构详见图1。
CANH CANL C图1 CAN 总线架构以下章节详细描述了物理层、数据链路层和交互层的参数: 物理层要求基于ISO11898-2/ISO11898-5/ISO15765-4; 数据链路层要求基于ISO11898-1/ISO15765-4; 交互层要求基于OSEK/VDX 和 AUTOSAR 。
ISO 15765.2(2004)故障诊断协议(CAN) - Part 2:Network layer services
公路车辆---控制器局域网(CAN)中的诊断第二部分:网络层服务1 范围ISO 15765的这一部分详细说明了一个被制定以满足基于CAN的车辆网络系统要求的网络协议,此车辆网络系统属于控制器局域网且在ISO 11898中有所阐述。
这个协议已经按照ISO 14229-1和ISO 15031-5所确定的诊断服务的要求而被定义过了,但不仅仅只限于以上用途;此协议同样也满足车载网络的其它大多数通讯的需要。
这个协议详细阐述了一种未经证实的通讯方式。
2 标准化参考条目以下参考文献对于这篇文章的应用是不可缺少的。
对于有日期参考的,仅可应用所提及的版本;对于没有日期参考的,则可应用涉及到这个文档(包括些许修改)的最新版本。
ISO 11898-1,公路车辆---控制器局域网(CAN)---第一部分:数据链路层和物理信号装置ISO/IEC 7498(全部),信息技术---开放式系统联接---基本参考模型3 术语,定义和简化术语出于这篇文章的写作目的,由ISO 7498给出术语和定义,并附带缩略术语,应用。
BS 字区大小CF 连续帧Confirm 原始服务确认ECU 电子控制单元FC 流程控制FF 首帧FF_DL 首帧数据长度FS 流程状态Indication 原始服务指示Mtype 讯息类型N_AE 网络地址范围N_AI 地址信息N_Ar 网络层计时参数ArN_As 网络层计时参数AsN_Br 网络层计时参数BrN-Bs 网络层计时参数BsN_ChangeParameter 网络层服务名称N_Cr 网络层计时参数CrN_Cs 网络层计时参数CsN_Data 网络数据N_PCI 网络协议控制信息N_PCItype 网络协议控制信息类型N_PDU 网络数据协议单元N_SA 网络源地址N_SDU 网络服务数据单元N_TA 网络目标地址N_TAtype 网络目标地址类型N_USData 网络层未答复分段数据传送服务名称NWL 网络层request 原始请求服务r 接收器s 发送器SF 单重帧SF_DL 单重帧数据长度SN 次序数字STmin 最小分隔时间4 网络层浏览4.1 概要这一款描述了网络层全部的功能。
电动汽车电池管理系统与非车载充电机之间的通信协议

电动汽车电池管理系统与非车载充电机之间的通信协议编制说明一、 制定背景和意义电动汽车产业化现阶段面临的最大困难是技术的成熟度问题,要实现产业化,其前提必然是统一的标准和规范。
为保证电动汽车充电设施的规范化和标准化,需制定电动汽车充电通信协议的标准,目前针对电动汽车的非车载充电通信协议国内外没有统一的标准。
本标准的目的就是针对电动汽车非车载充电在行业内形成统一的标准,为建立标准化、规范化的电动汽车充电设施奠定良好的基础。
本标准由全国汽车标准化技术委员会电动车辆分技术委员会动力蓄电池及其应用工作组通讯协议标准起草组负责起草。
二、 制定原则本标准的制定原则是立足国内,参考国际上在该领域的现有成果,结合中国的具体情况,本着科学、开放、适用和促进国内技术发展的原则,对电动汽车电池管理系统与非车载充电机之间的通信协议进行深入研究,制定出适合我国国情并且反应国内外电动汽车充电通信协议研究领域最新成果的标准。
三、 标准起草过程1.2009 年3 月27 日,电动车辆分技术委员会电动汽车用动力蓄电池及其应用标准化工作组在天津召开了工作组首次会议。
根据会上讨论意见,电动车辆分技术委员会秘书处走访了相关单位,综合各单位对该标准参与起草的申请情况和企业技术基础,确定了通讯协议标准起草组。
根据第一次工作组会议精神,标准起草工作组各成员单位按照分工进行了诸多富有成效的工作。
标准起草工作组在广泛收集资料并深入研究的基础上形成了标准草案稿。
2.2009年8月17日,在天津召开标准讨论会,针对该标准草案进行了讨论,会后,对标准草稿进行了讨论和修改。
3.2009年9月,标准起草工作组在天津与日产(中国)投资有限公司与日本东京电力公司进行了技术交流,了解了目前国外标准制定情况。
4.2010年1月13—14日,在天津召开标准讨论会,会后,对标准草案进行了修订。
5.2010年3月10日,形成标准征求意见稿。
四、 标准说明1、标准内容总体概括本标准共6章,1个规范性附录。
总线测试范围列表—单节点

总线测试范围列表—单节点1、物理层(参考标准为ISO11898-2、GMW3122)总线物理电平,包括隐性电平、显性电平、差分电平;终端电阻电容,包括CANH对CANL的终端电阻以及终端电容;总线边沿信号,包括位上升时间、位下降时间;位时间精度,测试差分电平位信号的时间特征;信号对称性,测试差分电平位信号的电平特征;采样点测试,标准最好是87.5%,参考范围是85%-90%;工作电压范围,测试最大最小供电电压;【故障管理性能测试项】包括如下:a.地偏移;b.掉电;c.掉地;d. CAN_H或CAN_L断路;e. CAN_H对CAN_L短路;f. CAN_H与/或CAN_L对电源短路;g. CAN_H与/或CAN_L对地短路;2、数据链路层(参考标准为ISO11898-1)CAN2.0B兼容性测试;高负载下的报文接收;短时突增报文的接收;错误帧数据的接收;3、网络管理层(参考标准为ISO11898-3)欠压停止情况下的报文发送停止时间;欠压恢复情况下的报文发送启动时间;过压停止情况下的报文发送停止时间;过压恢复情况下的报文发送启动时间;掉电情况下的总线关闭时间;BUSOFF恢复时间;BUSOFF恢复后的报文重发能力;BUSOFF恢复期间允许接收报文;4、应用层(参考标准为公司自定义总线协议、J1939)报文周期测试;报文ID测试;报文DLC测试;报文发送方式;报文数据类型;数据库正确性、协议一致性的测试;报文的未使用字节填充规则;报文的信号缺省值测试;校验和;计数器;事件性报文的发送延迟时间;事件性报文的快速发送次数;事件型报文的相邻两次触发发送之间的延迟时间;事件型报文在被动信号值变化时的发送行为;网关测试;总线负载率测试;错误帧率测试;错误波特率压力测试;波特率容忍度;报文压力测试;5、诊断协议测试(参考标准为ISO15765、ISO14229)安全访问;会话控制;时间参数;读写功能;故障代码;程序升级;。
容错CAN(低速CAN)介绍

容错CAN(低速CAN)介绍CAN-bus家族中有三大成员,分别是高速CAN、容错CAN、单线CAN。
其中容错CAN 又叫低速CAN,它与最常用的高速CAN有什么异同呢?这里将与大家分享下对容错CAN 的认识。
一、容错CAN的起源1986年Bosch在SAE(汽车工程人员协会)大会上提出CAN总线概念,CAN总线率先在汽车电子行业孕育。
随后的1987年Intel推出第一片CAN控制器芯片82526,由此点亮CAN 总线发展的星星之火。
六年之后CAN国际标准ISO11898/ISO11519发布,CAN总线在通信领域的燎原之势由此展开。
图1 CAN总线应用行业ISO11898是高速CAN的标准,ISO11519是低速CAN的标准。
起初,高速CAN数据链路层和物理层都在标准ISO11898中规定,后来被拆分为ISO11898-1(仅涉及数据链路层)和ISO11898-2(仅涉及物理层)。
其中标准ISO 11519-2-1994已经在2006年被ISO 11898-3-2006代替了,也就是说符合标准ISO 11898-3的产品也是支持符合ISO 11519-2标准的产品。
图2 CAN标准发展历程二、容错CAN与高速CAN的异同与高速CAN一样,容错CAN也是使用使用差分双绞线传输,包含CAN_H、CAN_L、GND三根线,在严格的工业应用场合同样要求使用专用的屏蔽双绞线并加必要的防护电路。
如图3,以OSI 7层通信模型为例,其实CAN总线标准规范了部分物理层、传输层及全部数据链路层规则,而应用层、表示层、会话层、网络层未做任何规范。
高速CAN与容错CAN 在数据链路层内容是相同的,因此它们在位传输时序、位仲裁、错误、校验、帧结构等是没有区别的。
图3 容错CAN与高速CAN标准化部分不同点在物理层的定义,图4是ISO11898与ISO11519-2电信号数据对比。
从图中可以看到,高速CAN最大通信速率为1Mbps,容错CAN最大通信速率为125Kbps,且在理论连接节点数方面高速CAN要大于容错CAN。
can通讯协议标准

CAN(Controller Area Network)通讯协议是一种广泛应用于汽车和工业自动化领域的串行通讯协议。
它是由博世公司(Bosch)在1986年开发的,主要用于解决汽车电子设备之间的通讯问题。
现在,CAN协议已经成为国际标准,并被广泛采用。
CAN协议的主要特点包括:
1. 消息优先级:CAN协议通过消息ID来确定优先级,ID数值越小,优先级越高。
2. 非破坏性仲裁:当多个节点同时发送消息时,通过非破坏性仲裁机制,确保高优先级的消息能够被先传输。
3. 差错检测和处理:CAN协议具有强大的差错检测和处理能力,能够检测到传输过程中的错误,并通过重传机制来确保数据的正确传输。
4. 灵活的数据传输率:CAN协议支持不同的数据传输率,可以根据不同的应用场景来选择合适的传输率。
5. 网络容量:CAN网络支持最多211个节点,可以满足大多数工业和汽车电子系统的需求。
CAN协议的标准主要包括:
1. ISO 11898-1:物理层和数据链路层规范
2. ISO 11898-2:传输层和应用层规范
3. ISO 11898-3:高速CAN规范
4. ISO 11898-4:flexible data-rate CAN
5. ISO 11898-5:时间触发CAN。
CAN总线的特点及J1939协议通信原理

CAN总线的特点及J1939协议通信原理、内容和使用来源:众多国际知名汽车公司早在20世纪80年代就积极致力于汽车网络技术的研究及使用。
迄今已有多种网络标准,如专门用于货车和客车上的SAE的J1939、德国大众的ABUS、博世的CAN、美国商用机器的AutoCAN、ISO的VAN、马自达的PALMNET等。
在我国的轿车中已基本具有电子控制和网络功能,排放和其他指标达到了一定的要求。
但货车和客车在这方面却远未能满足排放法规的要求。
计划到2006年,北京地区的货车和客车的排放要满足欧Ⅲ标准。
因此,为了满足日益严格的排放法规,载货车和客车中也必须引入计算机及控制技术。
采用控制器局域网和国际公认标准协议J1939来搭建网络,并完成数据传输,以实现汽车内部电子单元的网络化是一种迫切的需要也是必然的发展趋势。
1 CAN总线特点及其发展控制器局域网络(CAN)是德国Robert bosch公司在20世纪80年代初为汽车业开发的一种串行数据通信总线。
CAN是一种很高保密性,有效支持分布式控制或实时控制的串行通信网络。
CAN的使用范围遍及从高速网络到低成本底多线路网络。
在自动化电子领域、发动机控制部件、传感器、抗滑系统等使用中,CAN的位速率可高达1Mbps。
同时,它可以廉价地用于交通运载工具电气系统中,如灯光聚束、电气窗口等,可以替代所需要的硬件连接。
它采用线性总线结构,每个子系统对总线有相同的权利,即为多主工作方式。
CAN网络上任意一个节点可在任何时候向网络上的其他节点发送信息而不分主从。
网络上的节点可分为不通优先级,满足不同的实时要求。
采用非破坏性总线裁决技术,当两个节点(即子系统)同时向网络上传递信息时,优先级低的停止数据发送,而优先级高的节点可不受影响地继续传送数据。
具有点对点、一点对多点及全局广播接收传送数据的功能。
随着CAN在各种领域的使用和推广,对其通信格式的标准化提出了要求。
1991年9月Philips Semiconductors制定并发布了CAN技术规范(Versio 2.0)。
直流充电设备通用技术规范-附件4 充电控制器充电主模块与功率控制模块通信协议
电动汽车非车载传导式充电机直流充电控制器充电主控模块器与功率控制模块通信协议1 范围本部分规定了电动汽车非车载传导式充电机直流充电控制器充电主控模块与功率控制模块之间基于控制器局域网(Control Area Network,以下简称CAN)的通信物理层、数据链路层、交互流程、报文分类、报文格式和内容的定义。
本部分适用于电动汽车非车载传导式充电机直流充电控制器充电主控模块与功率控制模块之间的通信。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 19596 电动汽车术语IEC 60870-5-101 基本远动任务的配套标准(Transmission Protocols-Companion Standard for Basic Telecontrol Tasks)ISO 11898-1:2003 道路车辆控制器局域网络第1部分:数据链路层和物理信令(Road vehicle –Control area network (CAN) Part 1: Data link layer and physical signaling)SAE J1939-11:2006 商用车控制系统局域网CAN通信协议第11部分:物理层,250K比特/秒,屏蔽双绞线(Recommented practice for serial control and communication vehicle network Part 11: Physical layer–250K bits/s, twisted shielded pair)SAE J1939-21:2006 商用车控制系统局域网CAN通信协议第21部分:数据链路层(Recommented practice for serial control and communication vehicle network Part 21: Data link layer)3 术语和定义GB/T 19596界定的以及下列术语和定义适用于本文件。
can总线的国际标准(一)

can总线的国际标准(一)CAN总线的国际标准什么是CAN总线CAN(Controller Area Network)总线是一种常用于车载网络中的通信协议。
它最早由德国的Bosch公司开发,现已成为国际标准。
CAN总线在车辆领域广泛应用,能够实现车辆上各个电子控制模块之间的高效通信。
CAN总线的优势•高可靠性:CAN总线采用差分信号传输,能够有效抵抗电磁干扰,保证通信的可靠性。
•高带宽:CAN总线的通信速率可以达到几十kbps至几百kbps,满足车辆控制系统的要求。
•灵活性:CAN总线支持多主节点的连接,可以根据需要灵活扩展系统。
CAN总线的国际标准CAN总线的国际标准由ISO(International Organization for Standardization)制定和管理。
目前最常用的版本是ISO 11898标准。
ISO 11898标准概述ISO 11898标准详细定义了CAN总线在物理层和数据链路层的规范。
该标准主要包含以下几个方面:1.物理层规范:定义了CAN总线的电气特性,包括差分传输、传输速率、线缆特性等。
2.数据链路层规范:定义了CAN总线的数据帧格式和错误检测机制,保证数据的可靠传输。
3.网络管理规范:定义了CAN总线网络中的节点管理和通信协议。
ISO 11898标准的应用ISO 11898标准在汽车行业得到了广泛应用,并且在其它领域也有一定的应用。
例如,工业控制系统、航空航天领域等。
结论CAN总线作为车载网络中的通信协议,采用了国际标准ISO 11898。
其高可靠性、高带宽和灵活性使得CAN总线在车辆控制系统中得到广泛应用。
了解和遵守相关的国际标准对于CAN总线的开发和应用非常重要。
认识高速接入单元“ISO11898
认识高速接入单元“ISO11898
国内的新能源汽车正如火如荼发展,如何才能构建一致性更好的车载CAN总线网络?让我们从国际标准开始学习。
ISO11898是CAN总线国际标准,由德国BOSCH公司开发至今已经成为汽车控制系统的标准总线协议,而今国内新能源汽车发展随着双积分制已经开始对传统车企大面积普及,为了在转型过程中提高汽车稳定性,国际标准的研读成为重中之重。
图1 新能源汽车CAN总线透视图
任何一种通讯协议都要基于物理介质去构建,那幺高速(发送速率
1Mbps)介质有哪些特性值得我们注意的呢?今天我们以《ISO11898-2:高速介质访问单元》作为切入点去了解这份国标。
一、介质的特性
1、总线电平
总线能有两种逻辑状态中的一个:接收或发送(见图2)。
在接收状态,VCAN_L和VCAN_H固定在平均电平,由总线终端决定。
Vdiff低于最大阈值时,接收状态在总线空闲和接收数据位期间传递。
图2 CAN总线逻辑状态
在物理介质方面,CAN网络线束拓扑应尽量接近单根线的结构,线缆所使用的双绞线保持在一米50绞左右,外裹一层屏蔽线,有效减少干扰信号对差分电压的影响,同时也避免线束反射波,而其d和l的距离需要达到一定程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ISO11898-1数据链路层和物理层信号
ISO 11898-1定义了哪些内容,相关项目如何测试?
1、关于ISO 11898
ISO是世界性的标准化组织,主要任务是制定国际标准,协调世界范围内的标准化工作,与其他国际性组织合作研究有关标准化问题。
IS0 11898由以下部分组成:
ISO11898-1:数据链路层和物理层信号
ISO11898-2:高速接入单元
ISO11898-3:低速容错接入单元
11898-4:时间触发通讯
ISO11898-5:低功耗的高速接入单元
ISO11898-6:选择性唤醒的高速接入单元
最新的ISO 11898-2、ISO 11898-5和ISO 11898-6已经取代ISO 11898-2:2003、ISO 11898-5:2007和ISO 11898-6:2013。
2、ISO11898-1的定位
对比标准的OSI通讯协议模型,ISO 11898-1定义了CAN的数据链路层和部分物理层,如图1。
数据链路层和物理层具体可分为逻辑链路控制、媒介访问控制、物理层编码、物理层介质、物理层媒介依赖。
图1 ISO 11898的定位
3、适用范围
ISO11898-1旨在实现CAN模块之间数据链路层上的信息规范。
控制器区域的网络是一种串行通信协议,用于道路车辆和其他控制领域,支持分布式实时控制和多路复用。
ISO11898-1:2015适用于经典CAN帧与灵活CAN帧(CAN-FD)。
经典的CAN帧有效载荷达8个字节,比特率最高允许1 Mbit/s。
最新的CAN帧(CAN-FD)帧格式允许比特率高于1 mbit/s,并且有效载荷大于每帧8字节。
新帧架构(CAN-FD)兼容经典帧结构。
图2 新旧帧关系
4、基本概念
SO11898-1详细列举出CAN总线涉及到的基本概念。
具体细节请读者参考原文,此处不再展开。
图3 基本概念
5、CAN层体结构
ISO 11898-1包含逻辑链接控制子层(LLC)、介质访问控制子层(MAC)、物理编码子层(PCS)。
其中LLC包括接受过滤、过载通知以及恢复管理;MAC层包括数据封装与解封、帧编码、介质访问管理、错误检测、序列及反序列;PCS层包括位编码、位解码以及同步。
图4 ISO 11898包含的规范
6、MAC数据的一致性
要传送的消息是由LLC产生的,通过节点的控制器主机接口和数据链路层的子层传输到MAC子层。
MAC子层将把整个消息存储在一个临时缓冲区中,该缓冲区在传输开始之前被填充。
当传送的信息被传送到MAC的子层时,LLC子层应检查数据错误。
如果检测到数据错误,就不会启动传输。
如果在检测到数据错误时已经启动,那么节点将被切换到总线监控模式或进入受限的操作模式,接收节点将不会看到一条有效消息。
图5 自动错误过滤
7、错误及恢复
为了避免设备因自身原因影响其他正常节点,11898-1固定每个CAN控制器都有一个发送错误计数器(TEC)和接收错误计数器(REC)。
转换流程如图6。
主动错误状态:这是设备正常状态,设备正常参加通信,当检测到错误时发送错误标识;
被动错误状态:检测出错误后,设备将发送被动错误标识;
总线状态关闭:因为自身严重问题使总线自身进入总线关闭状态,该状态下无数据收发。
图6 设备状态转换
8、一致性测试
CAN总线实际应用中总会遇到很多问题,因此对总线的各个方面做一致性测试十分必要。
CAN的一致性测试包括物理层一致性测试、数据链路层一致性测试、应用层一致性测试。
参考ISO 11898-1,可使用CANScope对CAN总线做数据链路层一致性测试,包括图7内的测试项目。
图7 一致性测试项目
采样点测试:该测试旨在验证CAN 控制器的波特率采样点位置。
采用干扰的手段,将采样点位置的逻辑电平破坏,则这个CAN 报文将出现错误。
以此就可以确定干扰的位置为采样点位置。
图8 采样点测试
CAN2.0B 兼容测试: 测试被测设备DUT 是否能兼容CAN2.0B 的扩展帧,不会发出错
误帧。
根据GMW14242,要求在DUT在接收扩展帧时,不会有错误帧发出。
测试平台架构如图9所示。
图9 CAN2.0B兼容性测试
报文标示符测试:测试被测DUT 发出的报文标识符(ID)是否符合预期。
根据ISO11898-1,要求在DUT在发送所有应用报文,都具备正确的ID。
如图10在数据长度框、帧ID框内进行关键字检索,查找异常帧。
图10 报文标示符测试。