清华大学飞思卡尔智能汽车教程共71页
《智能车制作 “飞思卡尔杯”从入门到精通》教材部分章节节选
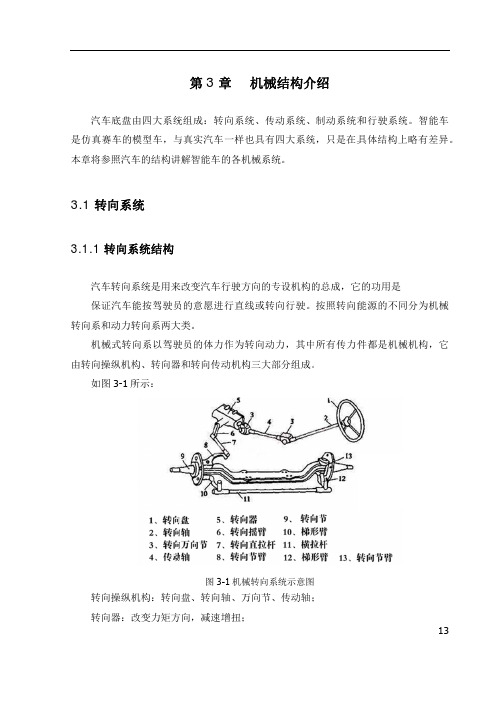
图 3-7 前置 置卧式
16 6
图 3-8 后置卧式
优点:安 安装原车模 模舵机布置方 方式、改动 动量小,重心 心低; 缺点:响 响应速度慢 慢、两边拉杆 杆长度不一 一样、转向不 不对称。 2).扣式
图 3-9 扣式 扣
优点:重 重心低、响 响应速度快、 、转向平顺 顺对称; 缺点:安 安装过程复 复杂、不利于 于后续维护 护调整。 3).卧式
图 3-14匀速圆 圆周运动
转向舵机因 因型号固定 定在供电电 压确定时其 其输出力矩 矩是固定的, ,我们知道 道力矩等于 于 力与 与力臂的乘积 积,即 M=F F*L。舵机 的输出力矩 矩与摆臂长度关系如下 下: 舵机转矩 矩=舵机摆臂 臂作用力*摆臂长度 摆 18 8
假设舵机 机输出力矩 矩是恒定的 ,其输出轴 轴的旋转角 角速度也是恒 恒定的,舵 舵机摆臂端 端 部的 的瞬时线速度 度随舵机摆 摆臂长度增 加而增大。摆臂的瞬 瞬时线速度大 大会导致转 转向系统灵 灵 敏度 度提高,这是 是我们最希 希望得到的。 。 同时,我 我们知道在 在转向时舵机 机摆臂的力 力传递搭到 到横拉杆,横 横拉杆的作 作用力大于 于 轮胎 胎阻力时才开 开始转向,小于或者 等于轮胎阻 阻力时不转 转向。开始转 转向后,横 横拉杆作用 力越 越大轮胎转的 的越快,也 也就是说转向 向响应速度 度越快。 而舵机力 力矩是恒定 定的,舵机摆 摆臂作用力 力与摆臂长 长度是成反比 比的,此长 长彼消。舵 舵 机摆 摆杆不能太长 长也不能太 太短,太短, 响应慢,太长,拉不 不动,响应 应也慢。 最合适的 的舵机摆臂 臂长度值, 可以通过转 转向系统四 四杆机构仿真 真结合实际 际测试来获 获 取。实际测试可 可以选用不 不同长度的舵 舵机摆臂装 装车后测试转 转向灵敏度 度。 获取最佳舵 舵机摆臂长 长度后,可 以对摆臂的 的外形做优 优化以达到减 减重、美观 观的效果。 图 3 3-15 为优化 化后的舵机摆 摆臂,选用 用 1mm 不锈钢板线切 切割成型。 不锈钢板有 有良好的刚 刚 度、韧性,为了 了减重将摆 摆臂中部切除 除一块。
飞思卡尔智能车教程-

下面通过例题讨论正弦稳态电路的各种分析方法。
一、求解一端口的阻抗或导纳 解
§9-3 正弦稳态电路的分析
习题9-1 试求图示各电路的输入阻抗Z和导纳Y。 (c)该一端口内不含受控源,可以利用阻抗的串并联 等效变换求得其输入阻抗或输入导纳。 串联等效阻抗为
Z 40 j 40 ( ) 1
Z 40 j 40 ( ) 2
一端口的输入阻抗为
Z Z ( 40 j 40 )( 40 j 40 ) Z 12 40 Z Z 40 j 40 40 j 40 1 2
一端口的输入导纳为
1 1 Y 0 .025 S Z 40
虽然电路中含有电感和电容元件,因为阻抗的电抗分量为 零或导纳的电纳分量为零,故该一端口是阻性阻抗,即对外 呈现电阻性。
5μF
UL Us
U V R 60
UC Us
-
U
U R I 60 53 . 13 V R
U j L I 240 36 . 87 V L
1 U j I 160 ( 143 . 13 ) V C C
这种现象在实际电路中要引起注意。这种现象发生的条 件一般是电路中既有L元件,又有C元件。
+ U
+
- + U L UR
5μF
+
-
s
U
.
C
-
1 B 0 .032 S L L eq
1 1 L 6 . 25 mH eq 0 . 032 0 . 032 5000
G
Leg
并联等效电路是一个电导元件和一个电感元件 的并联组合。
Z eqZ R Z L Z C 15 j20 25 53 .13 感性阻抗
[电子教案(PPT版本)]“飞思卡尔”杯智能汽车设计与实例教程 (3)[72页]
![[电子教案(PPT版本)]“飞思卡尔”杯智能汽车设计与实例教程 (3)[72页]](https://img.taocdn.com/s3/m/efb98131a5e9856a56126098.png)
低频段 基本相同
用PWM波代替正弦半波
用一等幅不等宽的脉冲来代替 一个正弦半波
把正弦半波N等分,看成N个相
连的脉冲序列,宽度相等,但 幅值不等;
用矩形脉冲代替,等幅,不等 宽,中点重合,面积(冲量) 相等,宽度按正弦规律变化
相关概念
占空比:高电平保持的时间与该PWM 时钟周期的时间之比
分辨率:指占空比最小值 频率 双斜率/单斜率
单片机需要一个稳定的电压保持平稳工作,所以供电 最好设计为独立供电,避免与其他负载并联导致负载变化时 影响单片机供电引起问题。 推荐使用“三端固定式集成稳压器”来为单片机提供降压稳
压供电。
正 输 入 电 压
C1、C3 滤波电容
C2、C4 抑制芯片 自激振荡
常用的稳压芯片有78系列、LM2940、AMS1117 等系列。由于78系列的稳压芯片发热量较大,不作推 荐。在5V稳压方案中使用LM2940进行讲解,在3.3V 稳压方案中则使用AMS1117-3.3。
5V传感器获取的信号要经过缓冲芯片变换为 3.3V的信号输入到单片机中
2.2 电动机驱动电路设计
电动机的速度是根据传感器的反馈 随时调整的
脉宽调制(PWM) 需要驱动模块来放大单片机输出的
信号 PWM信号的占空比决定电动机的转速
,故电动机的调速可通过改变PWM信 号的占空比来实现 欲实现双向控制,就要使用H桥。H 桥可以实现电动机的双向调速
LM2940S(TO-263-3)
AMS1117-3.3(SOT-223)
思考题:总结常用的稳压芯片,列出他们的异同点
滤
波
检测稳
电
压IC是
容
否有正
LM2940S 5V稳压电路示例
飞思卡尔智能车新手入门解决方案

目录目录 (1前言 (3一、基于飞思卡尔芯片的智能循迹车 (11、智能循迹车简介 (12、摄像头组方案 (1(1CMOS模拟摄像头 (2(2CMOS数字摄像头 (33、光电组方案 (4(1红外传感器 (4(2激光传感器 (64、电磁组方案 (10(1工型电感传感器 (10(2色环电感传感器 (10(3硬件设计 (105、道路识别策略 (11(1摄像头信号采集 (12(2红外传感器信号采集 (13(3电磁传感器信号采集 (136、电机驱动 (147、速度检测 (168、调试策略 (17(1速度调试(以摄像头组为例子 (17(2综合调试 (18二、入门级别智能车方案——基于STC89C52单片机智能小车 (191、简介 (192、方案 (19(1基于红外传感器循迹方案 (19(2基于激光传感器循迹方案 (203、利用中断调制PWM占空比驱动直流电机 (23 (1直流电机的实物图片 (23(2直流电机的介绍 (23(3直流电机的驱动 (234、利于中断调制PWM占空比驱动舵机摇头 (24 1、舵机的原理及其应用 (24(1舵机的实物图片: (24(2舵机的介绍 (25(3舵机的工作原理 (255、数码管显示 (251、数码管原理 (256、LED流水灯控制 (27LED灯参考电路图 (277、液晶显示 (28(11602液晶显示 (28a主要技术参数 (28b信号接脚 (29c基本操作时序 (29d电路图接法 (29(212864液晶显示 (30a主要技术参数 (30b信号接脚 (30c基本操作时序 (30d电路图接法 (318、ADC0804 (319、DAC0832 (3210、I2C总线 (3411、矩阵控制 (3512、蜂鸣器控制 (36前言智能化是21世纪机电一体化技术发展的一个重要发展方向。
人工智能在机电一体化及自动控制领域日益得到重视,现阶段在机电一体化及自动化专业教学方式上,部分院校较重视实践而轻理论,部分院校较重视理论而轻实践,但有一个共同点就是:通过一些相关技能竞赛能够有效地提高学生的综合能力,在比赛过程中充分锻炼了参赛者理论知识和实操能力;如:飞思卡尔智能汽车竞赛,电子设计竞赛,机械创新设计竞赛,瑞萨竞赛等。
飞思卡尔光电组
传感器硬件原理图
传感器元器件清单
? 发光二极管 × 8
发光二极管(贴片封装0805) × 8
? 接收管 × 8
调制管 × 4
? 三极管8050 × 4
电位器500Ω(滑动变阻器) × 8
? 电容0.1μF(贴片封装0603) × 8
? 电阻22Ω(贴片封装0805) × 16
? 电阻1.5kΩ(贴片封装0805) × 8
00110000000000
黑线相当偏左 01000000000000
没有黑线(盲区) 00000000000000
传感器在起点与十字路口
? 如何分辨是 后期重点
2、路径识别算法
? 传感器相关初始化
? void PORT_Init(void)
?{
? DDRA = 0x00;
//端口A方向输入
? PUCR_PUPAE = 1; //端口A信号上拉
按传感器输出信号不同,检测方法 分两种:数字量输出(调制,以我们学 校为代表)和模拟量输出(A/D,以清 华为代表)。
二、光电车硬件
元器件标号基本知识: R电阻标号识别
C电容标号识别
←无k是标号
有k就是阻值 →
光电传感器:发射电路
调制是为了将连续光变成频率约180kHz的光脉冲
注意:⒈我们使用的接收管只能接收调制光,因此发射管必须经过调制电 路发射调制光,否则接收管无法接收光信号;
? PORTA = 0x00; //端口A初值为0
}
寄存器按位赋值举例PUCR_PUPAE = 1; (PUCR |= 0x01;)
? 传感器状态采集:
? void Sensor_collect(void) //采集传感器状态
飞思卡尔智能车电路详解(全)
增加检测距离。但使用不当极易烧毁传感 器,因此初期使用时不推荐使用此方法。
视频分离电路 LM1881
测速传感器模块
• 霍尔传感器 • 反射式红外传感器 • 对射式红外传感器 • 测速电机 • 对加速度传感器进行积分
智能汽车
之
硬件电路设计
安徽大学 创新实验室整理
整个系统电路模块组成
• 单片机控制模块 • 黑线检测模块 • 测速模块 • 电机驱动模块 • 电源模块
单片机控制模块
黑线检测模块
• 光电组:反射式红外传感器、 激光传感器
• 摄像头组:CMOS、CCD
红外传感器RPR220
具体使用注意点
• 发光二极管部分在恒流情况下最大工作电 流为50mA。
• 电子调速器(电调) 好用,但实在太贵
L298N 输入输出
并联电路
MC33886并联电路
。。。。。。
电源模块
• 单片机系统模块电源 -- 5V(LM2940)
• 黑线检测传感器模块电源
光电 -- 5V(LM2575) 摄像头 -- 9V/12V(mc34063)
• 测速部分电源 -- 5V
• 舵机动电源 -- 电池直接供电 • 电机驱动模块电源 -- 电池直接供电
5V电源部分
LM2575芯片手册上的常用电路
二极管的额定电流值应大于最大负载电流的1.2倍,但考虑 到负载短路的情况,二极管的额定电流值应大于LM2575的最大 电流限制;另外二极管的反向电压应大于最大输入电压的1.25 倍。
LM2575芯片特点
• 优点: 转换效率高,芯片发热现象不明显,避
飞思卡尔智能车入门资料大全概要
1.2.2 动手能力和创新能力 常见电源电路和驱动电路设计 新的一些寻迹算法的提出等
二、硬件系统设计与实现
1)电源部分 2)电机驱动部分 3)舵机部分 4)图像采集部分 5)测速部分
1k
OUT1 CC P1 OUT2 33n VS S VS S D1 D2 47uF 47u VS S C3 0.1u GND GND C1 GND
GND 6 5 4 3 2 1 GND VC C PWM7 PWM5 D2 D1
20 DNC 4 V+ 5 V+ 16 V+ 18 D1 13 D2
R2 VC C
正确放电:
由于镍镉电池具有记忆效应,对电池的不完全放电将会人 为的降低电池的电容量; 从放电曲线可以看出,随着电池电量的减少,其电压也会 逐渐降低,当电压降低到某个阈值后继续放电,电池电压 将很快的跌落。这个阈值就是电池的放电下限电压。厂家 给出了放电下限电压为6V。因此,在使用时,建议在动力 车的电源设计中加入电池保护电路,当电池电压低于6V时 切断电路,用来保护电池。如果没有保护电路,要注意, 电池接通时人不要离开。因为当电池电压降到接近6V时, 电池已经给不出多少电流,已经没有能力驱动电机了,此 时一定要及时断开电路,到了给电池充电的时候了。
舵机控制方法
三线连接方式 红线:电源线+6V 蓝线:地线 黑线:PWM控制信号
2.2.2驱动芯片BTS7960/7970组成的电路
大功率驱动芯片BTS7970特性如下: 输入电压:6v---24v 输出电流: 最大可达60A 内阻:16毫欧 控制线电压: 5v PWM控制频率:25K
学做智能车挑战飞思卡尔之智能车制作PPT文档共65页
11、战争满足了,或曾经满足过人的 好斗的 本能, 但它同 时还满 足了人 对掠夺 ,破坏 以及残 酷的纪 律和专 制力的 欲望。 ——查·埃利奥 特 12、不应把纪律仅仅看成教育的手段 。纪律 是教育 过程的 结果, 首先是 学生集 体表现 在一切 生活领 域—— 生产、 日常生 (名 言网)
13、遵守纪律的风气的培养,只有领 导者本 身在这 方面以 身作则 才能收 到成效 。—— 马卡连 柯 14、劳动者的组织性、纪律性、坚毅 精神以 及同全 世界劳 动者的 团结一 致,是 取得最 后胜利 的保证 。—— 列宁 摘自名言网
15、机会是不守纪律的。——雨果
31、只有永远躺在泥坑里的人,才不会再掉进坑里。——黑格尔 32、希望的灯一旦熄灭,生活刹那间变成了一片黑暗。——普列姆昌德 33、希望是人生的乳母。——科策布 34、形成天才的决定因素应该是勤奋。——郭沫若 35、学到很多东西的诀窍,就是一下子不要学很多。——洛克
飞思卡尔智能车 XS128 PE编程入门教程
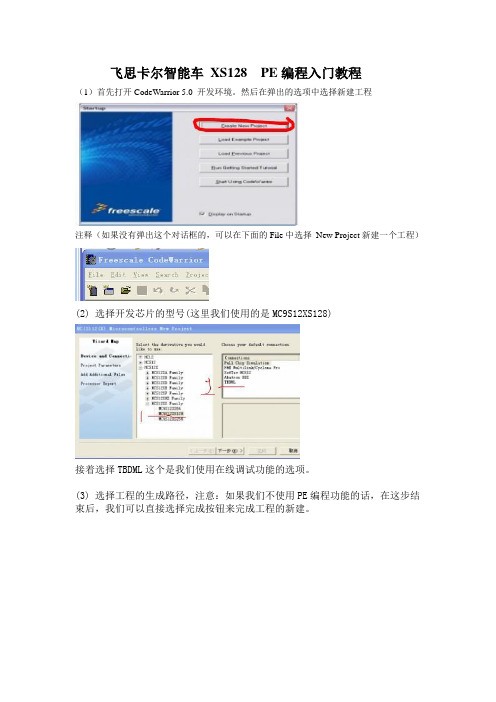
飞思卡尔智能车XS128 PE编程入门教程(1)首先打开CodeWarrior 5.0 开发环境。
然后在弹出的选项中选择新建工程注释(如果没有弹出这个对话框的,可以在下面的File中选择New Project新建一个工程)(2) 选择开发芯片的型号(这里我们使用的是MC9S12XS128)接着选择TBDML这个是我们使用在线调试功能的选项。
(3) 选择工程的生成路径,注意:如果我们不使用PE编程功能的话,在这步结束后,我们可以直接选择完成按钮来完成工程的新建。
(4) (PE编程功能的步骤)下一步,这个对话框我们什么都不用选择,直接点击下一步。
(5)选择下面这个选项来启动PE编程功能。
(6) 红色边框中的选项的功能为是否启动浮点数据的使用,默认第一个是不启用,第二个是启用,float数据为32位。
double为32位,第三个是启用,float 数据为32位,double数据为64位。
(7)最后一步什么都不要设置,直接点击完成。
(8) 以上步骤我们完成了一个XS128工程的新建步骤。
PE的使用步骤:(1) 新建工程后,会自动弹出个芯片封装型号的选择,选择好后点击OK。
(注意:我们学校有些芯片是80管脚的,也有112管脚的,所以注意选择红线标注的选项)(2) 点击OK后,就会出现我们要编程的环境了。
如下(3)红色标注的地方就是我们该工程的工作区了。
细心的同学就会发现,它生成的文件中没有我们需要写的源文件XXX.c 。
那我们现在就来生成这些文件。
找到下图的按键Processor Expert。
然后点击第二个选项的Generate Code ' XXXX .mcp' (这里的XXXX表示该工程名称).下面是自动生成的文件。
这时候我们发现软件为我们自动的生成了一个Project.c(Project 是我这个工程建立的文件命,不同的工程文件名将导致这个名字不同)的文件。
这个就是我们将要编写的源文件了,它里面包含了我们的主函数main()。