步进电机正反转及圈数控制
PLC控制步进电机正实现正反转速度控制定位

PLC控制步进电机正实现正反转速度控制定位 1.步进电机正反转如何实现2.如何控制步进电机速度(即,如何计算脉冲频率):实际步进电机控制很简单,应用都是傻瓜了,厂家做好步进电机的驱动器,步进电机如何工作由驱动器来控制,我们不需要对步进电机做深入的了解,只要知道步进电机驱动器的应用方法即可。
当然简单的步进电机工作特性,还是必须知道的,下面我会介绍!细分的作用:两相步进电机,基本步距角1.8度,即:200个脉冲电机转一圈,称之为整步。
可以在步进电机的驱动器上设定细分数,其作用是:设置为2细分(也称为半步)时,则步距角为0.9度,400个脉冲转一圈。
设置为4细分时,则步距角为0.45度,800个脉冲转一圈。
设置为8细分时,则步距角为0.225度,1600个脉冲转一圈。
细分数越高,上位机发一个脉冲走的长度越小,精度越高!这个很好理解,一个脉冲走10毫米,10%误差时,一个脉冲误差1毫米,一个脉冲走1毫米,同样是10%误差时,一个脉冲误差0.1毫米。
当然,我们不可能把细分数设的很大,达到每个脉冲行走的长度特别小的目的。
您记住两相步进电机200个脉冲转一圈就行了!细分越大,步进电机转一圈的脉冲数越大!如果想让步进机以每分钟600转的速度,行走400毫米,我们如何计算上位机需要发出的脉冲数及脉冲频率?如何控制步进电机速度(即,如何计算脉冲频率):假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机600转/分的转速,上位机应该发送的脉冲频率计算方法:频率的概念是一秒钟的时间发送的脉冲个数所以,先计算步进电机每秒钟的转数600/60=10转/秒再计算10转/秒需要的脉冲数10 X 800 = 8000个即脉冲频率为 8000 ,也就是8K结论,为了实现步进电机600转/分的转速,上位机应该保持8K的脉冲输出频率现在您明白了吧?为了计算脉冲频率必须知道的两个前提条件是:1、知道步进电机转一圈需要的脉冲数;2、知道步进电机的转速,转速单位是:转/如何计算步进电机所需要的脉冲数:假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机行走400毫米的距离,上位机应该发送的脉冲个数计算方法:如果步进电机输出轴与丝杠(螺距:10mm )直连,或是通过皮带轮传动,轮周长10mm. 即,步进电机转一圈,机械的行走长度为10mm。
PLC实现步进电机的正反转及调整控制
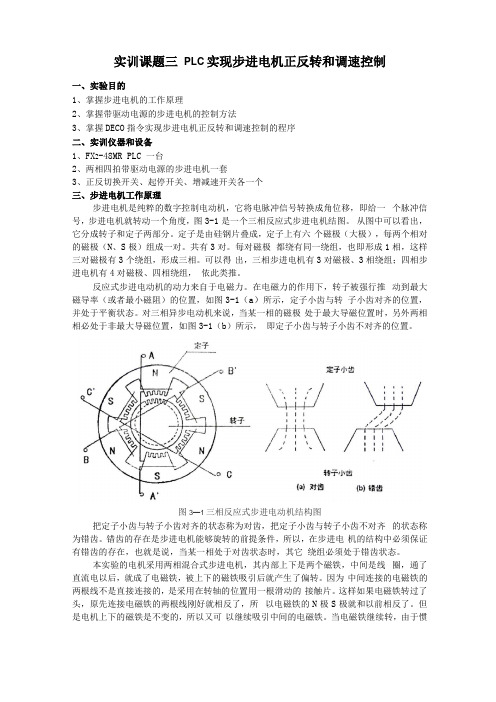
实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX2-48MR PLC 一台2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。
从图中可以看出,它分成转子和定子两部分。
定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。
共有3对。
每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。
可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。
在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。
对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。
图3—1三相反应式步进电动机结构图把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。
错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。
因为中间连接的电磁铁的两根线不是直接连接的,是采用在转轴的位置用一根滑动的接触片。
这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了。
PLC五相十拍步进电动机正反转与速度控制

PLC五相十拍步进电动机正反转与速度控制1. 前言PLC(Programmable Logic Controller)是一种可编程逻辑控制器,可用于自动化控制应用。
在许多自动化方案中,PLC与步进电动机相结合,可以实现机器的精确控制,以满足工业生产各种不同的需要。
本文将介绍如何使用PLC控制五相十拍步进电动机的正反转和速度控制。
2. 步进电动机和PLC的概述2.1 步进电动机步进电动机是一种电动机,能够通过逐步控制电流单步运转。
它们通常适用于需要非常精确的控制,例如打印机和数控机床。
步进电动机有两种类型:单相和多相。
单相步进电动机需要采用两路电源驱动;多相步进电动机通常有三相和五相。
2.2 PLCPLC是一种专门用于控制工业自动化过程的计算设备。
PLC的核心是一个具有高度可编程能力的处理器,可以通过编程控制机器的运转。
使用PLC可以实现快速的控制、布线简单,安装维护方便等优点。
3. 步进电动机的正反转与速度控制3.1 步进电动机的正反转步进电动机可以正转和反转,这意味着它们可以沿着不同方向工作。
为了实现正反转,电机需要改变运行时的极化方向(电流方向),这需要更改电路中电流的极性。
对于五相十拍步进电动机,需要根据电机特性和实际需要来设计逆变器电路。
PLC可以通过改变逆变器控制信号来实现步进电动机的正反转控制。
3.2 步进电动机的速度控制步进电动机的速度控制通常采用反馈的方式实现,即电机编码器的反馈信号。
PLC可以根据编码器的反馈信号来调整电机的驱动电压,从而控制电机的转速。
此外,还可以通过控制电机的脉宽调制信号来实现步进电动机的速度控制。
4. 总结本文介绍了如何使用PLC控制五相十拍步进电动机的正反转和速度控制,对于工业自动化控制领域中的应用具有一定的参考价值。
在实际应用中,需要根据电机的特性和使用环境来设计相应的PLC控制方案,从而实现精确的控制和优化的系统性能。
PLC实现步进电机的正反转及调整控制

PLC实现步进电机的正反转及调整控制PLC是专门用于控制工程自动化系统的一种可编程逻辑控制器,其可以通过编程来实现对各种电气设备的控制。
在实际工程中,步进电机广泛应用于自动化设备中,如数控机床、包装机械、印刷设备等。
步进电机具有分辨率高、精度高、响应速度快等优点,因此被广泛应用于各种自动化控制系统中。
在PLC实现步进电机的正反转及调整控制中,需要考虑以下几个方面:1.步进电机驱动模块选型:步进电机需要配合驱动模块进行控制,通常采用的是脉冲信号驱动方式。
在PLC控制系统中,可以选择适合的驱动模块,如常见的2相、4相步进电机驱动模块。
2.步进电机控制程序设计:通过PLC软件编程,编写程序实现步进电机的正转、反转及调整控制功能。
在程序设计中,需要考虑步进电机的控制方式、驱动模块的接口信号、脉冲信号的频率等参数。
3.步进电机正反转控制:在程序设计中,通过PLC输出脉冲信号控制步进电机的正反转运动。
具体步骤包括设置脉冲信号的频率和方向,控制步进电机按设定的脉冲信号实现正反转运动。
4.步进电机调整控制:步进电机的位置调整控制通常通过调整脉冲信号的频率和数目来实现。
通过PLC编程,实现步进电机的位置调整功能,从而实现对步进电机位置的精准控制。
5.总体控制设计:在PLC控制系统中,可以将步进电机的正反转及调整控制与其它控制功能相结合,实现对整个自动化系统的精确控制。
通过PLC编程,可以灵活设计多种控制逻辑,满足不同工程项目的需求。
综上所述,通过PLC实现步进电机的正反转及调整控制主要涉及步进电机驱动模块选型、控制程序设计、正反转控制、调整控制和总体控制设计等方面。
通过精心设计和编程,可以实现对步进电机的精确控制,满足各种自动化控制系统的要求。
PLC技术的应用将有助于提高自动化生产设备的生产效率和稳定性,推动工业自动化技术的发展。
PLC实现步进电机的正反转及调整控制
PLC实现步进电机的正反转及调整控制
一、PLC实现步进电机的控制原理
拿步进电机举例,大家可以把它想象成一个隔著一定距离的圆盘,隔着每一环的距离形成齿轮的节点。
步进电机的正向或反向转动,就是将这一环索引和圆盘一起发动转动。
步进电机的转动,是靠每一步索引圆盘来完成的,每一步都有一个控制信号来告诉电机从哪一环节点开始转动,当接收到控制信号时,电机开始转动,并且每转一圈循环转动几个索引。
1、正向、反向控制
要实现步进电机的正向反向控制,就要在PLC程序中控制信号形式来实现,一般可以使用两个控制信号,一个是正反控制信号,一个是步进电机转动的速度,要求PLC程序根据正反控制信号来实现正向和反向控制。
正反控制信号就是设置一个开关量变量,当这个开关量为ON时,电机运行正转,当开关量为OFF时,电机运行反转,具体可以采用T函数来实现,T11=1,电机正转,T12=0,电机反转。
由于步进电机的转动是一布一射的过程,所以需要用一个电位器来控制步进电机的转动速度,当电位器的旋钮调整到一定位置时,就会给出一定频率的步进信号,PLC程序可以根据此步进信号,来控制步进电机的转动速度。
PLC实现步进电机的正反转和调整控制

PLC实现步进电机的正反转和调整控制PLC(可编程逻辑控制器)是一种用于自动化控制系统的可编程电子设备。
在工业领域,PLC被广泛应用于各种自动化设备和机器的控制。
步进电机是一种非塔式电机,其运动是以固定的步长进行的,适用于需要精确定位的应用,如印刷机、数控机床等。
本文将介绍如何使用PLC实现步进电机的正反转和调整控制。
步进电机的正反转控制可以通过改变电机的运行顺序来实现。
一种常见的方法是使用四相步进电机,通过改变电机的相序来实现正反转。
一般来说,步进电机有两种驱动方式:全步进和半步进。
全步进驱动方式是指每次脉冲信号到达时,电机转动一个步进角度。
全步进驱动方式可以通过控制PLC输出的脉冲信号来实现。
例如,当需要电机正转时,在PLC程序中输出连续的脉冲信号,电机将按照一定的步进角度顺时针旋转。
当需要反转时,输出连续的反向脉冲信号,电机将逆时针旋转。
半步进驱动方式是指每次脉冲信号到达时,电机转动半个步进角度。
半步进驱动方式可以通过改变输出的脉冲信号序列来实现。
例如,正转时输出连续的脉冲信号序列:1000、1100、0100、0110、0010、0011、0001、1001,电机将按照半个步进角度顺时针旋转;反转时输出反向脉冲信号序列:1001、0001、0011、0010、0110、0100、1100、1000,电机将逆时针旋转。
调整控制是指通过PLC来调整步进电机的运行速度和位置。
调速控制可以通过改变输出脉冲信号的频率来实现。
例如,可以定义一个计时器来控制输出脉冲信号的频率,通过改变计时器的时间参数来改变电机的速度。
较小的时间参数将导致更快的脉冲频率,从而使电机加快转速。
位置控制可以通过记录步进电机当前的位置来实现。
可以使用PLC的存储和控制功能来记录和更新电机的位置信息。
例如,可以使用一个变量来保存电机当前的位置,并在转动过程中不断更新该变量的值。
通过读取该变量的值,可以获得电机当前的位置信息。
总结起来,使用PLC实现步进电机的正反转和调整控制可以通过控制输出的脉冲信号序列和频率来实现。
PLC控制步进电机正实现正反转速度控制定位
PLC控制步进电机正实现正反转速度控制定位PLC控制步进电机实现正反转速度控制定位是自动化生产过程中的一种常见应用。
本文将详细介绍PLC控制步进电机的原理、控制方式以及步进电机的正反转速度控制定位实现方法,并探讨其在实际应用中的优势和注意事项。
一、PLC控制步进电机原理步进电机是一种特殊的电动机,其每次输入一个脉冲信号后,会按照一定的角度旋转。
PLC(可编程逻辑控制器)是一种通用、数字化、专用微处理器,广泛应用于工业控制领域。
PLC控制步进电机可以通过控制脉冲信号的频率、方向和脉冲数来实现电机的正反转、速度控制和定位。
二、PLC控制步进电机的控制方式1.开关控制方式2.脉冲控制方式脉冲控制方式是PLC控制步进电机最常用的方式。
PLC向步进电机发送一系列脉冲信号,脉冲信号的频率和脉冲数决定了电机的转速和转动角度。
脉冲信号的正负决定了电机的正反转方向。
通过改变脉冲信号的频率和脉冲数,可以实现电机的速度控制和定位。
三、步进电机正反转速度控制定位实现方法步进电机的正反转速度控制定位可以通过PLC的程序来实现。
下面以一个简单的例子来说明该实现方法。
假设要实现步进电机顺时针转动2圈、逆时针转动1圈、再顺时针转动3圈的循环。
步进电机的一个转一圈需要200个脉冲信号。
首先,需要定义一个变量n,用来记录电机的圈数。
其次,在PLC的程序中编写一个循环步骤:1.设置脉冲信号的频率和脉冲数,使步进电机顺时针旋转2圈。
2.当步进电机转动2圈后,n=n+23.判断n的值,如果n=2,则设置脉冲信号的频率和脉冲数,使步进电机逆时针旋转1圈。
4.当步进电机转动1圈后,n=n-15.判断n的值,如果n=1,则设置脉冲信号的频率和脉冲数,使步进电机顺时针旋转3圈。
6.当步进电机转动3圈后,n=n+37.返回第一步,继续循环。
通过这样的循环过程,步进电机可以按照预定的顺序和速度进行正反转,并实现定位控制。
四、PLC控制步进电机优势和注意事项1.精确控制:PLC可以精确控制步进电机的转速和转动角度,适用于需要高精度定位的应用。
从接线再到编程,教你怎么一步步控制步进电机按一定角度旋转。

从接线再到编程,教你怎么⼀步步控制步进电机按⼀定⾓度旋转。
应⽤案例分析利⽤PLC作为上位机,控制步进电动机按⼀定的⾓度旋转。
控制要求:利⽤PLC控制步进电动机顺时针转2周,停5秒,逆时针转1周,停2秒,如此循环进⾏,按下停⽌按钮,电机马上停⽌(电机的轴锁住)。
按下脱机按钮,电机的轴松开。
系统接线:X0—启动,X1—停⽌,X2—脱机Y0-脉冲输出,Y1- 控制⽅向,Y2- 脱机控制。
细分和电流的设置。
假设步进电机的步距⾓是1.8°,要求设置4细分,电机的额定电流是2.2A。
按照我们上⼀篇⽂章所讲的细分设置与驱动电流设置表,所以DIP开关的设置是: DIP1为ON, DIP2为OFF, DIP3为ON, DIP4为ON, DIP5为ON, DIP6为ON, DIP7为OFF, DIP8为OFF。
程序编写:1、在没有设置细分时,步距⾓是1.8°,也即是200脉冲/转。
设置成4细分后,则是800脉冲/转。
(也就是说正转2圈我们⽤1600个脉冲即可,反转⼀圈⽤800个脉冲)2、控制程序可以⽤步进指令编写,⽤PLSY指令产⽣脉冲,脉冲有Y0输出,Y1控制⽅向。
梯形图:按下启动按钮产⽣⼀个短脉冲接通M10,步S0被激活,然后S20也被激活M0接通电动机正转,利⽤传送指令把1600传到D0⾥⾯去,这个D0就是这个PLC要产⽣的脉冲个数,正转2周说以需要1600个脉冲,当这些脉冲产⽣的脉冲完毕后M8029接通,就把状态S21激活,接通定时器定时5秒,定时完毕后再转移到状态S22,S22在这⾥是要反转的,所以我们接通M1与⽅向信号Y1,由于只需要转⼀圈所以我们只需要800个脉冲即可。
然后脉冲产⽣完毕后,M8029接通状态S23激活,然后再定时2秒后,如果不结束的话⼜从新开始循环。
在这⾥M0,和M1表⽰正转和反转,不管是正转还是反转接通我们都让PLC的PLSY这条指令⼯作,这条指令的意思是K800表⽰脉冲产⽣的频率,也就是1秒钟产⽣800个脉冲,D0为脉冲产⽣的个数,Y0是脉冲的输出点。
步进电机正反转实验报告资料

步进电机正反转实验报告资料一?实验名称:步进电机正反转训练二?控制要求要求实现电机的正转三圈,反转三圈,电机正转和反转的频率可不相同,然后这样循环3次,3次后电机停止转动?三?PLCI/O地址分配表PLC的I/O地址连接的外部设备Y0电机转向输出点控制转速点CPY1电机的转速输出点控制转向点CW四?程序梯形图五?程序分析:M11?M12?M13的波形图M21?M22?M23的波形图电机正转的频率是20赫兹,通过MOV指令送到D5中,在电机正传三圈后,电机反转,反转的频率是40赫兹,通过MOV指令送到D5中?电机正转3次,反转2次,再通过M23得电进入正转,重复上面的循环,即电机正转后再反转,M23才得电一次,所以可以加一个M23控制一个计数器计数,当计数器计数到3时,再通过计数器的常闭开关把M10线圈断电,从而实现电机停止?励志美文美句摘抄1?不要放弃自己就是真正的坚强,虚心就是坚强,努力就是坚强,从头再来就是坚强,正直就是坚强,学会坚强之前要学会爱惜自己?2?人生,就没有,永远的悲痛;也没有,永远的欢欣?能使我们坚强的,往往不是顺境,而是逆境;能让我们醒悟的,往往不是高兴,而是伤心?学会忍受,懂得艰辛,于曲折中前进?3?人都说比天空和大地更远的距离是人与人的距离,因为人心里都会藏匿太多的猜忌和戒备,想要快乐就甩开生命中这些过于沉重,却又不必要的行李吧,生命中有爱就足够了?试着给周围你所熟识的还有你还陌生的人一个真诚无惕的微笑吧,它可以触摸到他人的心灵,微笑是有感染力有连带性的,它会无声的渗透进每个易感的心灵,更会让更多的心灵为之感动,心中有爱就会快乐,就会让微笑发自心底,灿烂在脸上?4?千万不要因为自己已经到了结婚年龄而草率结婚?想结婚,就要找一个能和你心心相印相辅相携的伴侣?不要因为放纵和游戏而恋爱,不要因为恋爱而影响工作和事业,更不要因一桩草率而失败的婚姻而使人生受阻?感情用事往往会因小失大?5?你要从现在开始,微笑着面对生活,不要抱怨生活给了你太多的磨难,不要抱怨生活中有太多的曲折,不要抱怨生活中存在的不公?当你走过世间的繁华与喧嚣,阅尽世事,你会幡然明白:人生不会太圆满,再苦也要笑一笑!6?不要让灰色的乌云笼罩一辈子,生命中还有很多美好的不要让其遮盖,不要因为一片乌云毁了一切,人生中还有很多可以去把握?7?每一个成功者的背后都有一个心路的旅程,雨中漫步你不会比别人先一步看到彩虹?8?面对人生的烦恼与挫折,最重要的是摆正自己的心态,积极面对一切?再苦再累,也要保持微笑?笑一笑,你的人生会更美好!9?命运,不过是失败者无聊的自慰,不过是懦怯者的解嘲?人们的前途只能靠自己的意志?自己的努力来决定?10?你或许无法改变身高和体形,但是可以改变你的态度?我们每个人都有力量去培养和保持为我所用的积极态度,提高我们的人生质量,完成我们的人生目标?态度是人生理想的昭示,而非既有成果的反映?改变你的态度,就可以改变你的人生?11?不要像玻璃那样脆弱?有的人眼睛总盯着自己,所以长不高看不远;总是喜欢怨天尤人,也使别人无比厌烦?没有苦中苦,哪来甜中甜?不要像玻璃那样脆弱,而应像水晶一样透明,太阳一样辉煌,腊梅一样坚强?既然睁开眼睛享受风的清凉,就不要埋怨风中细小的沙粒?12?常言道,失败是成功之母,而我却认为,失败是一种解脱和潇洒,也是一种“得”?人生中,有成功有失败,成功是鲜花,失败同样也精彩?13?该来的会来,该走的会走,有时候离开并不意味着结束,而是另一种开始?14?人生,无非只有三天,昨天,今天,明天?昨天很长,说不清有多少天,但不管有多少天,不管是受到挫折,还是取得辉煌,都只能代表过去,昨天你失败了,将来可能会成功,昨天你辉煌了,将来你可能会萎靡不振,只有把过去的挫折和辉煌都变成今天的基石,才能登上美好的明天?15?每个人都有每个人的做法,每个人都有每个人的想法,别人做什么,想什么,我们无法掌握,也无法控制?我们能做的,就是做好自己,管好自己,凭自己的本身,靠自己的良心,踏踏实实地做事,老老实地做人,即使遭遇不公,遭遇不平,也能想开,懂得包容,学会用宽容的心怀,善良的言行,对待身边所有的人?生活中的许多磨难,让我们理解了人情,理解了这个社会能给你的所有尊重,于艰难中,懂得了承受,懂得了坚定,慢慢挺起自己的灵魂?16?老师告诉她,用心去观察研究昆虫和花草,渐渐地就会发现,动植物的世界是一个多么神奇有趣的世界?17?老师给我们讲了个有趣的故事?18?你说的这个问题本身就很有趣?19?世界是神奇的,让我们不断着探索周围发生的有趣的现象?20?他每天都坚持读一篇有趣的故事?21?他真是个有趣的人?22?天文馆里的宇宙空间,充满了神奇有趣的色彩?23?我看一本有趣的漫画书,笑得我肚子都疼了?24?星期三,学校举行了一次有趣的文艺演出,让我回味无穷,永远留在我的脑海里?25?学生选择自己喜欢的动物和反映的主题编写有趣的故事?26?要是法布尔先生不这样写的话,我完全可以认定这是一本普通的记叙文,一本枯燥无味的记叙文?((Agoodsentenceyuedu.mipang.))没有创意,没有什么特别的地方以及引人注目的地方?可他运用了,这样就像把我也一起带进了这个神秘有趣的昆虫王国,自己也是一只顽固可爱的小昆虫,就像在看动画片?小人书一样的有趣?好玩?把我吸进了这个似人却非人的王国?27?有趣的文艺演出在我们的掌声中结束了,我真希望这次文艺演出永远也不会结束?28?有些人认为杂志有趣,但是我觉得小说跟有趣?29?这位名扬四海?誉满天下的法布尔先生,运用了巧妙的拟人手法,再加入自己幽默生动的另我带着无比探索的精神去这神秘有趣的昆虫王国“探密”,不断了解昆虫先生的习性,与生活?30?最有趣的是两位同学表演说相声,相声的名字是“吹牛”?31?吹泡泡是一很有趣的事?32?冬天的早晨,窗户上总是模模糊糊的,妈妈说是窗户“流汗”了!哈哈,老师说这个比喻很有趣呢!33?非诚勿扰大家都来参加吧,非常有趣?34?今天的班会课十分有趣?35?今天和小敏约好出去玩,有趣的是,她把裙子穿反了?。
PLC实现步进电机正反转和调速控制

PLC实现步进电机正反转和调速控制PLC(可编程逻辑控制器)是一种专门用于工业自动化控制系统的计算机控制设备。
它可以实现对多种设备和机器的控制,包括步进电机。
步进电机是一种通过步进角度来控制转动的电机,其转动可以精确地控制在每个步进角度停留一段时间。
步进电机的正反转和调速控制是实现工业自动化过程中常用的功能,PLC可以很好地实现这些控制。
一、步进电机的正反转控制步进电机的正反转控制是通过控制步进电机的相序来实现的。
步进电机有多种相序方式,常见的包括正向旋转、逆向旋转、双向旋转等。
PLC 可以通过控制步进电机的相序开关来实现步进电机的正反转。
在PLC中,可以使用PLC的输出口来控制步进电机的相序开关。
通过将输出口与步进电机的控制线路连接,可以控制相序开关的状态,从而控制步进电机的正反转。
例如,将PLC的一个输出口连接到步进电机的CW (Clockwise)输入线路,另一个输出口连接到步进电机的CCW(Counter Clockwise)输入线路,可以通过控制这两个输出口的状态来实现步进电机的正反转。
二、步进电机的调速控制步进电机的调速控制是通过控制步进电机的脉冲频率来实现的。
步进电机的转速与脉冲频率成正比,脉冲频率越高,步进电机的转速越快。
因此,通过控制PLC输出口给步进电机发送的脉冲频率,可以实现步进电机的调速控制。
在PLC中,可以使用定时器模块来控制步进电机的脉冲频率。
定时器模块可以通过设定计时器的定时时间和周期,来控制输出口的脉冲频率。
通过控制定时器的定时时间,可以控制步进电机每个步进角度的停留时间,从而控制步进电机的转速。
除了定时器模块,PLC还可以使用计数器模块来实现步进电机的调速控制。
计数器模块可以通过设定计数器的初始值和计数步长,来控制输出口的脉冲频率。
通过控制计数器的初始值和计数步长,可以控制步进电机每个步进角度的停留时间,从而实现步进电机的转速控制。
三、步进电机正反转和调速控制实例以下是一个使用PLC实现步进电机正反转和调速控制的实例。
步进电动机正反转控制方法

步进电动机正反转控制方法
步进电动机是一种可编程的电机驱动器,可以通过控制其步进序列来实现精确的控制。
步进电动机的正反转是一个重要的功能,以下是实现步进电动机正反转的一些方法:
1. 使用两个不同的控制信号来控制步进电动机的正反转。
这种方法需要使用两个不同的控制信号,一个用于正转,另一个用于反转。
在控制电路中,需要将两个信号进行切换,以实现步进电动机的正反转。
2. 使用一个控制信号,通过控制步进电动机的步进序列来实现反转。
这种方法需要使用一个控制信号,将其与步进电动机的步进序列进行关联,以实现反转。
例如,当控制信号为高电平时,步进电动机会正向旋转;当控制信号为低电平时,步进电动机会反向旋转。
3. 使用反转开关来控制步进电动机的正反转。
这种方法需要使用一个反转开关,将其设置为“开”或“关”,以控制步进电动机的正反转。
在控制电路中,需要将反转开关的信号与步进电动机的控制信号进行关联,以实现反转。
以上是三种常见的实现步进电动机正反转的方法。
每种方法都有其优缺点,具体选择哪种方法取决于具体的应用场景和需求。
例如,使用两个不同的控制信号来控制步进电动机的正反转方法可以提供更精确的控制,但需要更多的电路和元件;使用反转开关来控制步进电动机的正反转方法则更为简单,但无法控制步进电动机的精确旋转方向。
步进马达正反转控制doc

步進馬達正反轉控制組員:邱維恩指導老師:陳清華日四技電機四B摘要本專題運用了雙極性驅動的步進馬達和SN8P2708AP來製作電路如圖2,並用表1的程式來達到步進馬達的控制關鍵詞: 雙極性驅動的步進馬達,精密速度控制,結論1 雙極性驅動的步進馬達步進馬達的驅動方式二種:單極性驅動(unipolar drive),另一為雙極性驅動(bipolar drive)。
單極性驅動的控制電路比較簡單,成本低,但是因為雙線繞組所以體積比較大。
雙極性驅動的優缺點剛好和單極性驅動相反,具有結構簡單,成本低的優點,但是控制電路比較複雜。
雙極性驅動就是利用電子切換開關使得每組線圈的電流方向可正可負,也因此稱作雙極性驅動。
圖1 為雙極性驅動步進馬達的內部繞線圖。
圖1 雙極性驅動步進馬達的內部繞線圖。
圖2 的電路為使用松翰科技公司的SN8P2708A 微控器來對雙極性驅動步進馬達的作速度控制。
由於雙極性驅動需要在步進馬達的電源側和接地側都接電晶體開關,所以用到二顆ULN2003A,一顆負責電源側的電晶體開關,另一顆負責接地側者。
注意,圖2 中的電路在A 相與A 相間和B 相與B 相間都加了一個反相器,所以僅能使用2 相激磁法於此電路;如果要使用其他激磁法,需將這二個反相器移去。
電路中使用可變電阻旋鈕作速度輸入,然後微控器依據輸入的速度調整步進馬達的速度。
速度命令的輸入需要類比轉數位器ADC,SN8P2708A 微控器具有一個12 位元解析度的八通道ADC,即腳位AIN0 ~ AIN7。
關於類比轉數位器ADC 的使用技巧,請參閱作者另一篇文章:電動滑板車速度控制器(e 科技雜誌,第28 期,pp. 18-21, 2003)。
以下則直接說明如何將類比轉數位的值換算成步進馬達的步進週期。
速度單位訂為每秒步數pps (pulses per second)。
圖2 應用於雙極性驅動步進馬達之電路圖。
最高速度設計為1000 pps,即每毫秒一步。
步进电机的正转与反转的控制

= P1^ 2; = P1^3; = P1^4; = P1^5; =1 ;
2.4.3 初始化各端口的函数
void Port_Init (void); void Timer0_Init (void); void OSCILLATOR_Init (void); void Wait_MS(unsigned int ms); void Ext_Interrupt_Init (void);
// LED='1' means ON
// SW1 ='0' means switch pressed // LED1 ='1' means ON
///电机 程程 int a=13,b=50,c=10,d=13,t=1;
//赋予a,d值为13,用来控制电机所要转的圈数
sfr16 RCAP2 sfr16 RCAP3 sfr16 TMR2 sfr16 TMR3
//---------------------------------------------------------------------
--------
#define SYSCLK
24500000
#define TIMER_PRESCALER
500
#define TIMER_TICKS_PER_MS SYSCLK/TIMER_PRESCALER/1000
主函数中主要负责检测红外线探头是否探测到有物体,当探测到有物体时则调用相应的电机正
转程序使得步进电机正转一定圈数,详细程序见附录。
if(inf)
//没有物体挡着为1,挡在上面为0
{
LED1 = 1;
//设置两个LED灯,便于不同的提示。
PLC实现步进电机的正反转和调整控制

PLC实现步进电机的正反转和调整控制PLC(可编程逻辑控制器)是一种电子设备,用于控制工业自动化系统中的运动和操作。
步进电机是一种常用的驱动器,它的旋转运动是通过一步一步地前进来实现的。
本文将探讨如何使用PLC来实现步进电机的正反转和调整控制。
步进电机的正反转控制是通过改变电机绕组的相序来实现的。
在PLC 中,我们可以使用输出模块来控制电机的相序。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
确保正确连接。
2.编程PLC:使用PLC编程软件,编写一个控制程序来实现电机的正反转。
首先,定义输出模块的输出信号来控制电机。
然后使用程序语言来编写逻辑控制指令,根据需要来改变输出信号的状态。
为了实现正反转,需要改变输出信号的相序。
3.实现正反转控制:在编程中,定义一个变量来控制步进电机的运动方向。
当变量为正值时,电机正转;当变量为负值时,电机反转。
根据变量的值来改变输出模块的输出信号,以改变电机的相序。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
启动PLC,程序将开始运行。
通过改变变量的值,我们可以控制电机的正反转。
除了控制步进电机的正反转,PLC还可以实现步进电机的调整控制。
调整控制是通过改变电机的步距和速度来实现的。
以下是步骤:1.配置PLC硬件:在PLC中插入输出模块,并与电机的各个相连接。
与正反转控制相同,确保正确连接。
2.编程PLC:使用PLC编程软件编写控制程序。
首先,定义输出模块的输出信号来控制电机的相序。
然后,使用程序语言来编写逻辑控制指令,根据需要改变输出信号的状态。
为了实现调整控制,需要改变输出信号的频率和占空比。
3.实现调整控制:在编程中,定义两个变量来控制电机的步距和速度。
步距变量控制电机每一步的距离,速度变量控制电机的旋转速度。
根据变量的值来改变输出模块的输出信号,以改变电机的相序,并控制步距和速度。
4.运行程序:将PLC连接到电源,并加载程序到PLC中。
PLC控制步进电机的正反转和速度
PLC控制步进电机的正反转和速度
1.控制要求
对定时器进行不同的时间定时控制其速度。
通过定时器定时通、断电使步进电机实现正反转。
本文以五相十拍步进电机用西门子S7-200plc来进行举例。
2.五相十拍步进电机的控制要求
1)五相步进电动机有五个绕组:A、B、C、D、E,控制五相十拍电动机的时序图如下:
2)用五个开关控制步进电动机工作:
1 号开关控制其运行(启/停)
2 号开关控制其低速运行(转过一个步距角需0.5S)
3 号开关控制其中速运行(转过一个步距角需0.1S)
4 号开关控制其低速运行(转过一个步距角需0.03S)
5 号开关控制其转向(ON为正转,OFF为反转)
3.PLC外部接线图
PLC外部接线图的输入输出设备、负载电源的类型等设计就结合系统的控制要求来设定。
其控制接线图如下图所示:
4.I/O地址分配
根据PLC外部接线图可以写出各电气元件符号、功能说明表及I/O 地址分配表如下:
5.五相十拍步进电动机的拍数实现梯形图如下:。
PLC实现步进电机的正反转及调整控制

PLC实现步进电机的正反转及调整控制PLC(可编程逻辑控制器)可以广泛应用于工业自动化控制系统中,包括步进电机的正反转及调整控制。
本文将详细介绍如何使用PLC实现步进电机的正反转及调整控制。
一、步进电机的原理步进电机是一种用电脉冲驱动的电动机,它是按固定顺序将电流导通到电动机的相绕组中,从而使电动机按步进的方式转动。
步进电机有两种基本的工作模式:全步进和半步进。
在全步进模式下,电机每接收到一个脉冲就向前转动一个固定的步距角度。
在半步进模式下,电机接收到一个脉冲时向前转动半个步距角度。
二、PLC实现步进电机的正反转1.硬件连接将PLC的输出端口与步进电机的驱动器相连,将驱动器的控制信号输出口与步进电机相连。
确保电源连接正确,驱动器的供电电压要符合步进电机的额定电压。
2.编写PLC程序使用PLC编程软件编写PLC程序来控制步进电机的正反转。
以下是一个简单的PLC程序示例:```BEGINMOTOR_CONTROL_TRIG:=FALSE;//步进电机控制信号MOTOR_DIRECTION:=FORWARD;//步进电机转动方向,FORWARD表示正转,REVERSE表示反转//步进电机正转控制MOTOR_FORWARD:IF(START_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=FORWARD;END_IF;//步进电机反转控制MOTOR_REVERSE:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=REVERSE;END_IF;//步进电机停止控制MOTOR_STOP:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=FALSE;END_IF;END```Begitalogic Flowcode是PLC编程软件之一,提供了简单易懂的图形界面来编写PLC程序。
实现步进电动机正反转的方法

实现步进电动机正反转的方法步进电动机是一种特殊的电动机,它可以按照一定的步长进行旋转,适用于需要精确控制位置和速度的应用。
步进电动机的正反转是指控制其旋转方向的操作,下面将介绍几种实现步进电动机正反转的方法。
1. 使用直流电源反向连接最简单的实现步进电动机反转的方法是通过改变电源的连接方式。
步进电动机通常有两种类型的线圈,分别记作A和B。
在正转时,电源的正极连接到A线圈,负极连接到B线圈;而在反转时,只需要将电源的正负极连接方式反过来即可。
这种方法的优点是简单易行,但需要手动操作电源连接,不适用于需要频繁反转的场景。
2. 使用电路切换正反转为了实现步进电动机的自动正反转,可以使用电路来切换电源连接方式。
这种方法通常使用继电器或开关来控制电源的连接,从而改变步进电动机的旋转方向。
通过控制继电器或开关的通断状态,可以轻松地实现步进电动机的正反转。
这种方法的优点是可以实现自动控制,但需要额外的电路设计和元器件,增加了系统的复杂度。
3. 使用驱动器控制正反转步进电动机通常需要使用驱动器来提供足够的电流和控制信号。
现代的步进电动机驱动器通常具有正反转控制功能,可以通过输入信号来控制步进电动机的旋转方向。
用户只需将控制信号设置为正转或反转,驱动器会自动控制步进电动机的旋转方向。
这种方法的优点是简单方便,无需额外的电路设计,适用于大多数步进电动机应用。
4. 使用编程控制正反转对于需要更精确控制步进电动机的应用,可以使用编程来实现正反转。
通过编写程序,可以根据需要控制步进电动机的旋转方向和步数。
编程控制的优点在于可以实现更复杂的运动模式和控制逻辑,可以满足各种应用的需求。
但这种方法需要具备一定的编程知识和硬件接口,对于初学者可能会有一定的难度。
总结起来,实现步进电动机正反转的方法有多种,可以根据实际需求选择合适的方法。
简单的方法包括改变电源连接方式或使用电路切换正反转;更先进的方法包括使用驱动器控制或编程控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/*************************************************************/ /*
/* ME300系列单片机开发系统演示程序-步进电机键控正反转实验
/*
/* 邮箱: gguoqing@
/* 网站:
/* 作者: gguoqing
/* 时间: 2006/05/30
/*
/*【版权】COPYRIGHT(C)伟纳电子 ALL RIGHTS RESERVED
/*【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!
/*
/************************************************************/
#include < reg51.h> //51芯片管脚定义头文件
#include < intrins.h> //内部包含延时函数 _nop_() ;
#define uchar unsigned char
#define uint unsigned int
uchar code FFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9} ;
uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1} ;
sbit K1 = P1^4 ; //正转
sbit K2 = P1^5 ; //反转
sbit K3 = P1^6 ; //停止
sbit K4 = P1^7 ;
sbit BEEP = P3^7 ; //蜂鸣器
/********************************************************/
/*
/* 延时t毫秒
/* 11.0592MHz时钟,延时约1ms
/*
/********************************************************/ void delay(uint t)
{
uint k ;
while(t--)
{
for(k=0 ; k<125 ; k++)
{ }
}
}
/********************************************************/ void delayB(uchar x) //x*0.14MS
{
uchar i ;
while(x--)
{
for (i=0 ; i<13 ; i++)
{ }
}
}
/********************************************************/ void beep()
{
uchar i ;
for (i=0 ;i<100 ;i++)
{
delayB(4) ;
BEEP=!BEEP ; //BEEP取反
}
BEEP=1 ; //关闭蜂鸣器
}
/********************************************************/ /*
/*步进电机正转
/*
/********************************************************/ void motor_ffw()
{
uchar i ;
uint j ;
for (j=0 ; j<12 ; j++) //转1*n圈
{
if(K4==0)
{break ;} //退出此循环程序
for (i=0 ; i<8 ; i++) //一个周期转30度
{
P1 = FFW[ i ] ; //取数据
delay(15) ; //调节转速
}
}
}
/********************************************************/
/*
/*步进电机反转
/*
/********************************************************/ void motor_rev()
{
uchar i ;
uint j ;
for (j=0 ; j<12 ; j++) //转1×n圈
{
if(K4==0)
{break ;} //退出此循环程序
for (i=0 ; i<8 ; i++) //一个周期转30度
{
P1 = REV[ i ] ; //取数据
delay(15) ; //调节转速
}
}
}
/********************************************************/ *
* 主程序
*
*********************************************************/ main()
{
uchar r,N=5 ; //N 步进电机运转圈数
while(1)
{
if(K1==0)
{
beep() ;
for(r=0 ;r<N ;r++)
{
motor_ffw() ; //电机正转
if(K4==0)
{beep() ;break ;} //退出此循环程序
}
}
else if(K2==0)
{
beep() ;
for(r=0 ;r<N ;r++)
{
motor_rev() ; //电机反转
if(K4==0)
{beep() ;break ;} //退出此循环程序
}
}
else
P1 = 0xf0 ;
}
}
/***************************************************************/。