基于STM32的智能巡检机器人的设计
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断发展,智能家居已成为现代生活的重要组成部分。
扫地机器人作为智能家居领域中的一员,以其便捷、高效、智能的特点受到了广泛关注。
本文将详细介绍基于STM32的扫地机器人的设计与实现过程,包括硬件设计、软件设计、系统实现以及测试与优化等方面。
二、硬件设计1. 微控制器:选用STM32系列微控制器,具有高性能、低功耗的特点,满足扫地机器人对控制系统的要求。
2. 电机与驱动:扫地机器人采用直流电机,配合电机驱动模块,实现机器人的运动控制。
3. 传感器:包括红外线测距传感器、超声波测距传感器、碰撞传感器等,用于实现机器人的避障、定位等功能。
4. 电源模块:采用可充电锂电池,为扫地机器人提供稳定的电源。
5. 其他硬件:包括电源开关、充电接口、LED指示灯等辅助模块。
三、软件设计1. 操作系统:采用实时操作系统(RTOS),实现多任务调度,提高系统响应速度和稳定性。
2. 算法设计:包括路径规划算法、避障算法、清洁模式算法等,实现扫地机器人的智能控制。
3. 通信协议:设计扫地机器人与上位机通信的协议,实现远程控制、状态反馈等功能。
4. 软件架构:采用模块化设计,将软件分为多个功能模块,便于后期维护和升级。
四、系统实现1. 路径规划:扫地机器人采用激光雷达或视觉传感器进行环境感知,通过路径规划算法生成清洁路径。
2. 避障功能:通过红外线测距传感器和超声波测距传感器检测障碍物,实现避障功能。
3. 清洁模式:扫地机器人可设置多种清洁模式,如自动模式、沿边模式、重点清洁模式等,以满足不同需求。
4. 远程控制:通过上位机与扫地机器人通信,实现远程控制功能。
5. 状态反馈:扫地机器人通过LED指示灯和上位机界面反馈工作状态和电量等信息。
五、测试与优化1. 测试:对扫地机器人进行功能测试、性能测试和稳定性测试,确保各项功能正常工作。
2. 优化:根据测试结果对算法和硬件进行优化,提高扫地机器人的工作效率和清洁效果。
基于stm32单片机的巡航浇水机器人系统设计
基于stm32单片机的巡航浇水机器人系统设计摘要:近年来,我国对于农业经济的发展愈加重视,农业生产在国民经济中所占比重一直是重要的经济支柱。
并且,农业作为我国的一个古老的行业是不可缺少的,每个国家都是以农业作为立国之本。
随着时代的变化能也的变化也是不可避免的,除了观赏性的农业之外,农业必须向集体化方向发展,在中国农业的发展面临着严峻的挑战。
这也是我们必须发展现代化农业的原因。
然而,传统的农业种植方法存在许多亟待解决的问题,比如我国的大规模农业发展存在劳动力不足,生产效率低下以及现代化程度低下等问题。
特别对于浇水问题,目前我国农业种植方面特别是大棚的灌溉方式主要使用的还是漫灌或滴灌的浇水方式,这种浇水方式需要使用大量的滴灌带,这直接提高了农业生产成本。
所以针对此项问题,本文设计了一种基于轨道自动巡航的浇水机器人。
本文所设计的机器人采用轨道自动巡航导航的方式,由电机和轮子控制机器人的运动和方向,保证均匀浇水。
并配备传感器可以检测土壤湿度和环境温度,提供智能化的浇水控制。
关键词:轨道巡航,自动浇水,传感器引言当前智能机器人已进入高速发展期,在各行各业发挥着十分重要的作用,为人类实现了经济价值和社会价值。
正如我国著名学者周海中先生在1990年发表的经典文章《论机器人》中预言:“随着科学技术的进步,尤其人工智能和机器人技术的发展,智能机器人时代即将来临;智能机器人将在各行各业大显身手,推动着我们工作和生活的变革。
”仅从目前农业看,他的这一预言已经成为现实。
智能机器人是一门涵盖了多学科的科学,涉及人工智能、机械工程、控制科学、计算机、电子、材料等多个领域。
它具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉等。
除具有感受器外,它还有效应器,作为作用于周围环境的手段。
随着社会发展的需要和机器人应用领域的扩大,人们对智能机器人的要求也越来越高。
目前农业正处于快速发展期,存在很大的发展空间;美国、法国、德国、英国、日本、韩国等大力发展农业智能机器人技术,使其农业技术不断提升。
基于STM32的智能分拣机器人系统设计

基于 STM32的智能分拣机器人系统设计摘要:本文研究的主要内容是单片机采集TCS230颜色传感器的数据进行数据对比,分拣颜色,从而输出指令给电机驱动板,单片机再采集灰度条的状态,判断小车坐标,进行路线规划,控制小车寻迹至各颜色对应的区域。
本论文的主要特点是,采用输出数字量的8路灰度条传感器进行小车的寻迹与坐标定位;使用4线spi通讯的OLED屏设计人机交互;使用4自由度的机械臂作为机器人搬运或夹取物品的工具。
关键词:环境监测;分拣、TCS230颜色识别、机械臂、单片机;1 引言今年来,随着中国快递行业的快速发展,行业规模迅速扩大,在2020年,中国的快递年总业务量已超过了800亿。
面对物流行业业务量的快速增长,对快递的分拣效率要求也在不断的提高。
目前许多的物流公司也都采用了许多不同的分拣机器。
在科技的发展中,机器人能够有效的提高劳动生产率、产品质量、生产效率与降低生产成本等方面都有着重要的作用和意义。
随着现代计算机网络技术的发展和信息社会技术时代的进步,智能工业机器人的物流技术研究和其应用逐渐成为社会广泛关注的热点,并且在经济社会的各个领域中广泛使用[1][1]。
智能分拣机器的出现,在物流行业中的中转中心环节能够大大的减少人力负担,并且提升分拣效率,降低分拣的容错率。
2 系统总体设计方案图1系统总体设计方案/系统结构图2.1 系统硬件结构1.硬件系统搭建本系统的硬件平台如下图所示:图2硬件平台图系统整体设计以STM32作为核心,包括各种传感器模块,电源模块,电机模块,机械臂,设计一个分拣智能机器人。
机器人的行动方式采用了智能小车作为运输承载作用的方案,使用灰度条循迹传感器进行路线的识别及规划,输出PWM给L298N驱动板来控制电机,使用比较基础的颜色传感器TCS230进行颜色识别,对比数据,针对物品的颜色进行分类,其中分拣的颜色为RGB(红绿蓝)三种颜色。
当颜色传感器检测到物品颜色后,系统能够根据检测到的物品颜色控制机器人将物品进行特定区域的分拣,完成机器人智能分拣任务。
《基于STM32移动机器人目标动态追踪的研究》范文
《基于STM32移动机器人目标动态追踪的研究》篇一一、引言随着科技的进步和人工智能的不断发展,移动机器人的应用越来越广泛,其动态追踪技术成为了一个重要的研究方向。
STM32微控制器由于其高性价比和良好的可编程性,被广泛应用于各种机器人系统。
本文将就基于STM32移动机器人目标动态追踪的技术展开研究,介绍其系统架构、算法设计以及实验结果。
二、系统架构基于STM32的移动机器人目标动态追踪系统主要由以下几个部分组成:STM32微控制器、传感器模块、电机驱动模块、电源模块等。
1. STM32微控制器:作为整个系统的核心,负责处理传感器数据、控制电机驱动模块以及与上位机进行通信。
2. 传感器模块:包括摄像头、红外传感器等,用于捕捉目标信息,为动态追踪提供数据支持。
3. 电机驱动模块:根据微控制器的指令,控制机器人的运动,实现目标的追踪。
4. 电源模块:为整个系统提供稳定的电源供应。
三、算法设计目标动态追踪算法是整个系统的关键,本文采用基于图像处理的算法进行目标追踪。
1. 图像预处理:通过摄像头采集图像,对图像进行灰度化、二值化等预处理操作,提取出目标信息。
2. 目标检测与跟踪:利用图像处理技术,检测出目标的位置,并通过卡尔曼滤波算法对目标进行预测,实现目标的动态追踪。
3. 路径规划与控制:根据目标的位置和速度信息,通过PID 控制算法规划机器人的运动路径,控制电机驱动模块驱动机器人进行追踪。
四、实验结果与分析为了验证本文所提出的基于STM32移动机器人目标动态追踪系统的有效性,我们进行了以下实验:1. 静态目标追踪实验:在室内环境下,对静态目标进行追踪,实验结果表明,系统能够准确检测并锁定目标,实现静态目标的稳定追踪。
2. 动态目标追踪实验:在室外环境下,对动态目标进行追踪,实验结果表明,系统能够实时检测并预测目标的位置和速度,实现动态目标的快速追踪。
3. 系统性能分析:通过对实验数据的分析,我们发现系统的响应速度较快,追踪精度较高,且具有良好的鲁棒性,能够在不同环境下实现目标的稳定追踪。
基于STM32微控制器的扫地机器人控制系统硬件架构设计
基于STM32微控制器的扫地机器人控制系统硬件架构设计扫地机器人是一种智能化的家庭清洁设备,它能够自动进行地面清洁工作,并具备一定的智能化能力。
为了实现扫地机器人的控制,需要设计一个适合的硬件架构,以便能够满足机器人的功能需求。
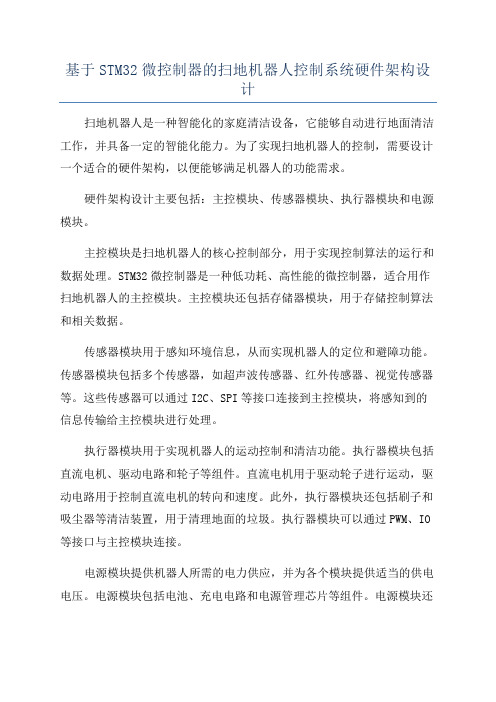
硬件架构设计主要包括:主控模块、传感器模块、执行器模块和电源模块。
主控模块是扫地机器人的核心控制部分,用于实现控制算法的运行和数据处理。
STM32微控制器是一种低功耗、高性能的微控制器,适合用作扫地机器人的主控模块。
主控模块还包括存储器模块,用于存储控制算法和相关数据。
传感器模块用于感知环境信息,从而实现机器人的定位和避障功能。
传感器模块包括多个传感器,如超声波传感器、红外传感器、视觉传感器等。
这些传感器可以通过I2C、SPI等接口连接到主控模块,将感知到的信息传输给主控模块进行处理。
执行器模块用于实现机器人的运动控制和清洁功能。
执行器模块包括直流电机、驱动电路和轮子等组件。
直流电机用于驱动轮子进行运动,驱动电路用于控制直流电机的转向和速度。
此外,执行器模块还包括刷子和吸尘器等清洁装置,用于清理地面的垃圾。
执行器模块可以通过PWM、IO 等接口与主控模块连接。
电源模块提供机器人所需的电力供应,并为各个模块提供适当的供电电压。
电源模块包括电池、充电电路和电源管理芯片等组件。
电源模块还需要考虑电源管理的智能化设计,如低电量检测、过充保护等功能,以保障机器人的正常运行。
在设计硬件架构时,需要考虑以下几个因素:1.通信接口的设计:主控模块需要与传感器模块、执行器模块以及外部设备进行通信。
合理选择通信接口,如UART、I2C、SPI等,以满足不同模块之间的数据传输需求。
2.电路设计的可靠性:扫地机器人需要面对不同的工作环境,如地面的不平整、摩擦力等。
因此,在电路设计中需要考虑电路的抗干扰能力和稳定性,以确保机器人能够正常工作。
3.电源管理的智能化设计:合理设计电源管理模块,可实现低电量检测、过充保护等电源管理功能,以保护电池和延长机器人的工作时间。
基于STM32的智能巡线机器人设计_英文_

D_mcahi`chn_ffca_hnfch_-nl[]echali\in\[m_^ihSTM32GAOZb_ha-tbiha,WANGXc[i-boc,LIZbc-q_h(CollegeofElectricalEngineeringandAutomation,ShandongUniversityofScienceandTechnology,Qingdao266590,China)A\mnl[]n:Ahchn_ffca_hnfch_-nl[]echali\inomchanb__hb[h]_^gc]lijli]_mmilSTM32F103RBT6[mcnm]il_]ihnliff_lcmch-nli^o]_^chnbcmj[j_l〃Tb_b[l^q[l_]ih`caol[ncih[h^fch_-nl[]echa]ihnlifjlch]cjf_i`nb_msmn_g[l_^_m]lc\_^,[h^nb_\f[]e-qbcn_g[le_^jlial[g^_mcahi`nb_m_hmilcm[h[fst_^〃Tqiginilm[l_l_mj_]ncp_fs^lcp_h\snqiH-\lc^a_^lcpcha]cl]ocnm,qbc]b[l_`ilg_^\s`iol^cm]l_n_]igjih_hnmi`g_n[firc^_m_gc]ih^o]nil(MOS)`c_f^_``_]nnl[hmcmnill_mj_]-ncp_fs〃Bs[fn_lchap[fo_mi`pifn[a_^cl_]ncihm[h^jofm_qc^nbgi^of[ncih(PWM),nb_q[fecha^cl_]ncih[h^nb_mj__^i`li\in[l_[^domn_^,[h^nb_nl[^cncih[fPID]ihnlifnb_ilscm[^ijn_^ni[^domnnb_li\in^olchaq[fechajli]_mm〃Tb_l_mofnmch^c][n_nb[nnb_^_mcahcmm]c_hnc`c][h^l_[mih[\f_,fiq]imn,aii^[^[jn[\cfcns[h^bcab[jjfc][\cfcns〃K_sqil^m:chn_ffca_hnli\in;STM32;fch_-nl[]echa;PWM;PID]ihnlifCLDhog\_l:TP242〃6Alnc]f_ID:1674-8042(2014)02-0055-04Di]og_hn]i^_:A^ic:10〃3969/d〃cmmh〃1674-8042〃2014〃02〃011f_li`STM32qbc]bcm\[m_^ihchjonm_hmilni]ih-nlifm_lpiginil[h^aoc^_^cl_]ncihi`nb_li\in〃0Ihnli^o]ncihIhnb_l_]_hnli\in]ihn_mnm[h^_f_]nlihc]^_mcah]ihn_mnm,gimni`nb_]igj_ncncihn[meml_ko_mnli\inmniq[fe[fihanb_qbcn_ilnb_\f[]eaoc^_fch_mchnb_`c_f^〃Tb_j[j_ljonm`ilq[l^nb_^_mcahmnl[n_asi`chn_ffca_hnfch_-nl[]echali\inm\[m_^ihSTM32,qbc]b`i]om_mihnb_]ihnlifjlch]cjf_i`msmn_g[nc]fch_-nl[]echa[mq_ff[mnb_^_mcahi`m_hmil]cl]ocnm,[h^chnli^o]_mjlijilncihchn_al[-ncih^c``_l_hnc[ncih(PID)mj__^l_aof[ncihi`nb_msmn_g\lc_`fs〃2Cihnlifjlch]cjf_i`fch_-nl[]echamsmn_gW[fechaalioh^i`nb_li\incmnb_qbcn_KT\i[l^,[h^nb_h[pca[ncihfch_cmnb_\f[]en[j_〃W_]biimchanb_l_`f_]ncp_ch`l[l_^jbini_f_]nlc]m_hmili`ST188[cgnin[e_nb_[^p[hn[a_i`nb_mo\-mn[h]_mi`^c``_l_hn]ifilmqbc]b][h[\mil\fcabnchp[lscha^_al__m〃Tb_m_hmil'm_gcnncha^ci^_]ih-mn[hnfs_gcnmch`l[l_^fcabnionq[l^〃Wb_h_gcnn_l_hn_lmchninb_qbcn_[l_[,nb_l_]_cp_lno\_i`nb_m_hmil^_n_]nmnb_l_`f_]n_^\[]ech`l[l_^l[sm〃Wb_hcn_hn_lmchninb_\f[]en[j_[l_[,nb_ch`l[l_^l[sm[l_[\mil\_^,[h^nb_l_]_cp_lno\_[fgimn][h'n^_n_]n,[hsl_`f_]n_^\[]ech`l[l_^l[s〃Do_nimnl_hanbi`nb_l_]_cp_^ch`l[l_^l[sm,nb_chjonm_hmilqcffmbiq^c``_l_hnf_p_fm(bcabilfiq)〃A]-]il^chani]b[ha_mi`chjonf_p_fm,nb_gc]li-]ih-nliff_l][hn[e_]ihnlifi`nb_li\in[h^g[e_^_]c-mcihm〃1Cihnlifjlch]cjf_i`fch_-nl[]echamsmn_gAhs_g\_^^_^chn_ffca_hnmsmn_gh__^mnii\n[chionmc^_ch`ilg[ncihnblioabnb_m_hmil〃A]]il^chaninb_`__^\[]ech`ilg[ncih,[gc]li-]ihnliff_lcmom_^ni][f]of[n_[h^g[e_^_]cmcih,[h^cn][ha_h-_l[n_]ihnlif]igg[h^m[h^]ihnlifnb_msmn_g'm]ill_mjih^cha[]no[nilni]igjf_n_nb_l_f_p[hnn[memnblioabnb_ionjonjiln〃Umchanb_\[]e-alioh^i`qbcn_KT\i[l^[h^nb_h[pca[ncihlion_nig[e_oji`\f[]ehih-mfcjn[j_qbim_]ifilcmal_[nfs^c``_l_hn`lignb_alioh^'m]ifil,cn'mom_^niaoc^_^cl_]ncihi`nb_li\in〃W_^_mcah[hchn_ffc-a_hnli\inqbc]bl_fc_mihl_`f_]ncp_ch`l[l_^jbini-_f_]nlc]m_hmili`ST188nigip_nb_jli\_`ilq[l^[fihah[pca[ncihlion_m,[h^om_mnb_gc]li-]ihnlif-3D_mcahi`msmn_gb[l^q[l_Ihil^_lni_r[]nfsfi][n_jimcncihi`nb_li\inqcnbnb_fch_-nl[]echam_hmilchnb_`lihn[h^ihnb_mc^_mi`nb_][l,nqiDCmj__^-l_^o]_ginilm[l_[-^ijn_^\s]b[hacha^cl_]ncihi`nb_pifn[a_ni]ih-nlifnb_jimcncp_chp_lmcihi`nb_ginil[h^l_mj_]-*R_]_cp_^^[n_:2014-02-25Cill_mjih^cha[onbil:WANGXc[i-boc(qrbftq@126〃]ig)56 Vif〃5Ni〃2,Joh〃2014Jiolh[fi`M_[mol_g_hnS]c_h]_[h^Ihmnlog_hn[ncihncp_fsl_[fct_g[mn_l^lcp_i`f_`n[h^lcabnqb__fm, [h^[^ijnnb_jbini_f_]nlc]cns_h]i^_lnin_mnnb_ mj__^i`nb_li\in〃Tb_mnlo]nol_i`nb_msmn_g cm mbiqhchFca〃1〃 Tb_bilctihn[fj[lnm[l_chmn[ff_^qcnb[hi^^hog- \_li`m_hmilmchil^_lni[]]ol[n_fs^_n_lgch_nb_ `lihngc^fch_,qb_hnb_][lcmchnb_\f[]en[j_〃 Ah^nb_^_`f_]ncih][h\_do^a_^\[m_^ihfi][ncih i`nb_l_mj_]ncp_m_hmil〃Tb_`lihnjilncih i`nb_ f_`n[h^ lcabnmc^_mm_hmilm][h ^_n_lgch_ gono[f ]limmp_lnc][fh[pca[ncihfch_ni[^domnjimnol_i`nb_ p_bc]f_\i^s\[m_^ihfi][ncihi`nb_l_mj_]ncp_m_h- mil,qbc]bjf[sm[e_slif_`ilnb_chn_ffca_hnli\in chlohhchani]limmfch_i`nolhcha gip_g_hn〃Tb_ f[sion_hmol_mnb_][lniloh[fiha[acp_h^cl_]ncih [`n_lhog_liomn_mnm〃Do_ninb_l_`f_]ncp_ch`l[l_^ m_hmil,mnl_hanbi`nb_ch`l[l_^l_]_cp_lm_hmilno\_ b[m[]_ln[chl_f[ncihmbcj qcnbcnmb_cabn`lig nb_ alioh^,qbc]bf_[^mninb[nnb_ionjon]oll_hnp[fo_ i`nb_ m_hmil b[m [ ]_ln[ch l_f[ncihmbcj qcnb cnm b_cabn`lig nb_ alioh^〃Tb_l_`il_,nb_ ^cmn[h]_ `lignb_alioh^nichmn[ff[ncihi`nb_m_hmilcm]lo- ]c[f〃Tb_^[n[i\n[ch_^\s_rj_lcg_hnmcmmbiqhch T[\f_1,miq_][hehiqnb[nnb_ijncgogb_cabni` nb_m_hmil[\ip_nb_alioh^cm0〃8]g〃T[\f_1 Oonjon]oll_hni`^c``_l_hnchmn[ff[ncihb_cabn Fca〃1 Ssmn_gmnlo]nol_ 3〃1 STM32F103RBT6ih-]bcjl_miol]_ Abcab-j_l`ilg[h]_ARM Ciln_r-M332-\cnRISC chh_l ]il_ cm [^ijn_^ ch nb_ STM32F103RBT6, qb_l_nb_ ARM Ciln_r-M332-\cnRISCchh_l]il_ cmjlipc^_^qcnbij_l[ncha`l_ko_h]sojni72 MHt〃 A \ocf^-ch128 KV \sn_bcab-mj__^ g_gils,nbl__ USARTm,nqi SPIm,nqiI2Cm,`iol16-\cnncg_l/ ]iohn_l [h^ nqi g_[mol[\f_ 12-\cn msh]blihiom ADCm,_[]bi`qbc]bb[m16_rn_lh[f]b[hh_fml_- mj_]ncp_fs〃Ah^_p_ls jiln][h \_]ih`caol_^chni p[lciomgi^of_mnblioabmi`nq[l_jlial[ggcha〃A jfol[fcnsi`I/Om[l_jlipc^_^ qcnb gofnc-`oh]ncih[f nqi-q[s]igj[nc\f_][j[]cns,[h^nb_ip_lnolhcha mj__^][h\_ojni18 MHt 〃 3〃2 D_mcahi`fch_-nl[]echam_hmil]cl]ocn 3〃2〃1 L[sioni`m_hmil Tb_msmn_gcmchmn[ff_^chnb_`lihni`bilctihn[fjcn]b i`m_p_hm_hmilm qcnbnb_f_`njilncih,[h^ lcabnjilncihi`p_lnc][fgiohnchajcn]b`cp_m_hmilm [l_m_nnb_ m[g_ j[lnm i`nb_ qc^nb i`nb_ nqi [^d[]_hnm_hmil\f[]e[hncmfcjn[j_mi`\[h^qc^nb〃 b_cabn(]g) 0〃6 0〃7 0〃8 0〃9 1〃0 Oonjon]oll_hn(gA) 5〃1 7〃4 7〃9 7〃2 5〃43〃2〃2 Bf[]e-[h^-qbcn_][fc\l[ncih Tb_msmn_g [^ijnml_`f_]ncp_ch`l[l_^jbini_f_]- nlc]m_hmili`ST188,qbc]bcmgo]b gil_m_hmcncp_ nichn_l`_l_h]_i`ionmc^_fcabn〃Tb_l_`il_,nb_^_- mcah i`mi`nq[l_cm][fc\l[ncih i` \f[]e-[h^-qbcn_ [l_[m〃A ^c[fmqcn]bcmom_^ni][fc\l[n_nb_\f[]e- [h^-qbcn_[l_[m\_`il_q[fechai`li\in,qbc]b][h l_^o]_ionmc^_chn_l`_l_h]_,[h^_hb[h]_[\cfcnsi` nb_li\inni [^[jnni nb_ _rn_lh[f_hpclihg_hn〃 S]b_g[nc]^c[al[gi`b[l^q[l_][fc\l[ncihcmmbiqh chFca〃2〃 [1] Fca〃2 S]b_g[nc]^c[al[gi`b[l^q[l_][fc\l[ncih Fclmn,[ffnb_m_hmilmchnb_][ljichnninb_\f[]e h[pca[ncih fch_m〃 Tb_ ^c[f mqcn]b cm nolh_^ ni jl_^_`ch_^\f[]e][fc\l[ncihal[^_ohncfnb_fcabn-_- gcnncha^ci^_`f[mb_m[h^nb_][fc\l[ncih i`\f[]e h[pca[ncihfch_mcm]igjf_n_^〃Tb_h[ffnb_m_hmilm jichnninb_qbcn_[l_[,[h^nb_^c[fmqcn]bcmnolh_^GAO Zb_ha-tbiha,_n[f〃/D_mcahi`chn_ffca_hnfch_-nl[]echali\in\[m_^ihSTM32 57nijl_^_`ch_^\f[]e][fc\l[ncihal[^_ohncfnb_fcabn- _gcnncha ^ci^_ `f[mb_m [h^ p_lc`c][ncih i` qbcn_ [l_[mcm ]igjf_n_^〃 Tb_ mi`nq[l_ `fiq ]b[ln cm mbiqhchFca〃3〃 ginil^lcp_l]bcj[h^l_[fct_koc]emn[lnginil[h^ g[e_ginilmj__^mgiinb〃 4 PIDmj__^l_aof[ncihi`msmn_g Tb_nbl__nsjc][f`ilgmi`^cacn[fPID]ihnliff_lm [l_jlijilncih[f,jlijilncih[fchn_al[f[h^jlijil- ncih[f chn_al[f ^c``_l_hnc[f l_aof[nilm〃 Cihnlif chn_hmcnsi`nb_jlijilncih[fl_aof[nil^_j_h^mih nb_ jlijilncih ]i_``c]c_hn〃Ih]l_[mcha i`nb_ jli- jilncih]i_``c]c_hnl_^o]_mnb_mn_[^s-mn[n_ _llil〃 Bonc`nb_jlijilncih[f]i_``c]c_hncmniif[la_,cn qcff^[g[a_nb_ ^sh[gc] j_l`ilg[h]_i`nb_msm- [2,3]n_g,[h^_p_hf_[^msmn_g nichmn[\cfcns 〃Ihn_- al[f-[]ncihi`jlijilncih[fchn_al[fl_aof[nil_fcgc- h[n_mnb_l_mc^o[fmn_[^s-mn[n__llili`jlijilncih[f ]ihnlif,[h^cgjlip_mmn[\cfcnsi`nb_msmn_g,\oncn l_^o]_ml[jc^l_mjihm_[\cfcnsi`nb_msmn_g [nnb_ m[g_ncg_[4]〃Tb_dichni`nb_^_lcp[ncp_[]ncihmi` nb_ jlijilncih[fchn_al[f^c``_l_hnc[fl_aof[nill_- ^o]_mnb_msmn_g ip_lmbiin,ip_l]ig_mim]cff[ncih [h^ g[e_mnb_msmn_gmn[\cfcns〃 Tb_^cacn[fPID ]ihnlif[failcnbgcm^cpc^_^chni nqinsj_mi`nb_jimcncih[fPID ]ihnliff_l[h^nb_ ch]l_g_hn[fPID ]ihnliff_l[5]〃Tb_ msmn_g [^ijnm nb_ch]l_g_hn[fPID ]ihnliff_l,[h^nb_mn[h^[l^ `ilgcmΔu(k)=u(k)-u(k-1)=Fca〃3 Ffiq]b[lni`mi`nq[l_][fc\l[ncihKj[e(k)-e(k-1)]+Kj T e(k) +TI 3〃3 D_mcahi`^lcp_h]cl]ocn Tb_msmn_gom_mnqi H-\lc^a_^lcp_l]cl]ocnm]ih- mncnon_^\s`iol^cm]l_n_]igjih_hnmi`g_n[firc^_ m_gc]ih^o]nil (MOS)ni ^lcp_nb_ ginilmi`f_`n [h^lcabnl_mj_]ncp_fs〃E[]b ginil'm^lcp_h]cl]ocn b[mnbl__]ihnlifn_lgch[fm,[h^nb_]ihnlifn_lgc- h[fm[l_l_mj_]ncp_fs ginil_h[\f_]ihnlif,ginil `ilq[l^]ihnlif,ginill_p_lm_]ihnlif〃Bs]b[h- achap[fo_mi`nb_jif[lcnsi`nb_pifn[a_ q[p_[h^ jofm_qc^nb gi^of[ncih (PWM)ni]ihnlifnb_nl[p- _ffcha^cl_]ncih[h^mj__^i`nb_chn_ffca_hnli\in,cn ][h[pic^nb_]bcj`_p_l][om_^ \snb_chn_al[n_^ TDKj T[e(k)-2e(k-1)+e(k-2)], qb_l_kcmnb_m[gjf_hog\_l,k=0,1,2,3,…;u(k) cmnb_k-nb PWM ionjon;Δu(k)cmnb_k-nbionjon ch]l_g_hni`nb_PWM;e(k)cm^_pc[ncihp[fo_i` nb_k-nbm[gjfcha;T cmnb_m[gjfchancg_;KP cm jlijilncih[fa[chi`nb_]ihnliff_l;TIcmnb_]ih- nliff_l'mchn_al[ncihncg_]ihmn[hn;TDcmnb_]ihnlif- f_l'm^_lcp[ncp_ncg_]ihmn[hn〃 S]b_g[nc] ^c[al[g i` nb_ ch]l_g_hn[f PID ]ihnliff_lcmmbiqhchFca〃4〃 Fca〃4 S]b_g[nc]^c[al[gi`ch]l_g_hn[fPID]ihnliff_l [6]`illi\in][l]igj_ncncihm 〃 Cigj[l_^ qcnb i\m]ol_ PID,m_f`-[^[jncp_ PID [h^ _rj_ln PID [failcnbg,nb_ ]ihp_hncih[f PID ][hhinihfsm[ncm`snb_jl[]nc][fl_kocl_g_hn,\on [fmi\_aii^,mcgjf_[h^]ihp_hc_hn`ill_[f-ncg_ j_l`ilg[h]_,[h^_[msnicgjf_g_hn,micn'mmocn[\f_ 5 Cih]fomcihSTM32F103RBT6cm[^ijn_^[mnb_]il_]ihnliff_l58Vif〃5Ni〃2,Joh〃2014Jiolh[fi`M_[mol_g_hnS]c_h]_[h^Ihmnlog_hn[ncihi`nb_msmn_g,[h^nb_]ihnliffchamsmn_gi`nb_ch-n_ffca_hnfch_-nl[]echali\incm[h[fst_^[h^^_-mcah_^〃M_[hqbcf_,chil^_lnil_^o]_nb_chn_l`_l-_h]_mihnb_fch_-nl[]echai`nb_chn_ffca_hnli\in`lignb_mollioh^cham,[\f[]e-[h^-qbcn_m_hmil][fc\l[ncihjlial[gcm^_mcah_^〃TqiDCginilm[l_l_mj_]ncp_fs^lcp_h\snb_nqiH-\lc^a_^lcp_h]cl]ocnm,qbc]b[l_[^ijn_^\snb_msmn_g[h^`ilg_^\s`iol^cm]l_n_]igjih_hnm(MOSno\_)〃Bs[fn_lchapifn[a_^cl_]ncihm[h^PWM,mj__^gi^c`c][ncihi`nb_DCginillin[ncihchjimcncp_[h^h_a[ncp_^cl_]ncihmcm[]bc_p_^,[h^nb_PID]ihnlifcm[^ijn_^ni[^domnq[fechajli]_mmi`nb_li\in[8]〃T_mnl_mofnmmbiqnb[nnb_mcgjf_[h^fiq-]imnm_hmilcml_[mih[\f_,[h^nb_^lcp_h]cl]ocnm[l_mn[\f_[h^bcabfs_``c]c_hn〃Tb_li\incmmnlihach[^[jn[\cfcnsninb__rn_lh[f_hpclihg_hn,aii^ch`f_rc\cfcns[h^p[fo[\f_chmno^s[h^[jjfc][ncihm〃R_`_l_h]_m[1]LIULiha-dc,LISbc-ao[ha,GAOZb_ha-tbiha〃D_mcahi`gi\cf_li\infch_-nl[]echa]ihnlifmsmn_g〃Ci[fMch_M[]bch_ls,2009,30(7):124-126〃[2]GAOYo_-bo[〃D_mcahi`[onihigiomnl[]chamsmn_gchchn_ffca_hnp_bc]f_\[m_^ihch`l[l_^jbini_g_]nlc]m_h-mil〃S_gc]ih^o]nilOjni_f_]nlihc]m,2009,30(1):134-137〃[3]LIUYo[h-gcha,LID[i-fch,HANXo-j_ha〃D_mcah[h^cgjf_g_hn[ncihi`ch^o]ncp_fch_-nl[]echa][l〃Ef_]nlihc]D_mcahEhach__lcha,2011,19(10):70-73〃[4]DUANYcha-e[ha〃H[l^q[l_^_mcahi`mg[lnfch_-nl[]e-cha][l\[m_^ihMC9S12XS128MCU〃Ef_]nlihc]Cigji-h_hn&D_pc]_Ajjfc][ncihm,2010,12(1):33-35〃[5]PENGG[ha,QINZbc-kc[ha〃Ajjfc][ncihjl[]nc]_i`_g-\_^^_^gc]li]ihnliff_l\[m_^ihARMCiln_r-M3STM32m_lc_m〃B_cdcha:B_cdchaEf_]nlihc]Ih^omnls,2011〃[6]JIANGXo_-doh,LIUXch-aoi,LIXc[i-dcha〃Cigjon_l]ihnlifn_]bhifias〃B_cdcha:Tmchabo[Uhcp_lmcns,2009〃[7]GONGM[i-`[,HUANGH_-miha〃MCS-51/52gc]li-[7]]ihnliff_lnb_il[h^l[]nc]_〃B_cch:B_cchUhcp_lmcsjdada-nsi`A_lih[onc]m[h^Amnlih[onc]m,2009〃[9][8]HUACb_ha-scha,TONGSbc-\[c〃B[mcmi`[h[fia_f_]-nlihc]n_]bhifias〃B_cdcha:Hcab_lE^o][ncihPl_mm,2006〃[9]ZHUOQcha,HUANGK[c-mb_ha,SHAOB_c-\_c〃L_[lhnig[e_mg[ln][lm,Cb[ff_ha_“Fl__m][f_”Coj〃B_cdcha:B_cdchaA_lih[onc]m[h^Amnlih[onc]mohcp_lmcns,2007〃[10]ZHUXc[i-fc,LISbc-ao[ha,ZHANGK[c〃Ssh]blihiomfch_-nl[]echali\inm\[m_^ihSTM32〃Jiolh[fi`M_[m-ol_g_hnS]c_h]_[h^Ihmnlog_hn[ncih,2013,4(1):58-62〃[10]基于STM32的智能巡线机器人设计高正中,王晓慧,李志文(山东科技大学电气与自动化工程学院,山东青岛266590)摘要:本文提出了一种以增强型微控制器STM32F103RBT6为核心的智能巡线机器人,阐述了系统的巡线控制原理、硬件构造,分析了传感器的黑白标定软件设计。
基于STM32和OpenMV的水下机器人管道巡检系统设计

基于STM32和OpenMV的水下机器人管道巡检系统设计目录一、项目概述 (2)二、系统架构设计 (3)三、硬件设计部分 (4)1. STM32处理器选型及配置 (6)2. 水下机器人机械结构设计 (8)3. 传感器模块选型及应用设计 (9)四、软件设计部分 (10)1. OpenMV视觉识别模块设计 (12)a. 图像采集与处理模块设计 (13)b. 目标识别与定位算法设计 (15)c. 图像传输与处理优化策略 (16)2. 路径规划与控制系统设计 (18)a. 自主巡航路径规划算法设计 (19)b. 遥控操作与控制系统设计 (20)c. 异常情况处理机制设计 (22)五、通讯系统设计 (23)1. 水下通信模块设计 (25)a. 水声通信模块设计原理及实现方案 (26)b. 其他水下通信方式研究及选型依据 (27)2. 地面站通信系统构建方案探讨与实施细节展示环节介绍等内容安排说明28一、项目概述随着科技的快速发展,水下机器人技术已成为海洋资源开发、水下探测与监测领域的重要技术手段。
“基于STM32和OpenMV的水下机器人管道巡检系统设计”旨在结合先进的微控制器STM32与OpenMV 视觉处理技术,构建一套高效、智能的水下机器人管道巡检系统。
本项目的实施,对于提高管道巡检效率,及时发现潜在隐患,保障管道安全运行具有重要意义。
该项目旨在设计一个自动化、智能化的水下机器人,使其能够在复杂的管道环境中自主巡航,完成管道状况检测、环境数据采集等任务。
系统主要组成部分包括水下机器人本体、STM32微控制器、OpenMV 视觉处理模块以及其他辅助模块如传感器、通信模块等。
STM32作为机器人的大脑,负责控制机器人的各项功能;OpenMV则用于图像采集与处理,帮助机器人实现目标识别、障碍避免等功能。
本项目的设计目标是实现一个可靠、高效、智能的水下机器人管道巡检系统。
通过本系统的实施,可以实现对管道内部状况的非接触式检测,有效避免传统人工巡检带来的安全隐患和效率低下的问题。
基于stm32的儿童健康检测机器人的设计

基于stm32的儿童健康检测机器人的设计摘要:儿童健康检测器作为智能技术之一,能够对儿童健康状况进行辨识,当发生问题后能够及时进行辨识和发出警告。
有助于父母对儿童身体情况的了解,并能根据晨检的结果采取相应措施,保护儿童身体健康。
实现该技术以传感器与机器应用学习为中心。
这就要求对复杂数据进行抽取,并利用机器进行加工和分析。
本文主题围绕关于STM32设计的儿童晨检器设开讨论设计,从选材的硬件开始到软件的设计进行简易的模型设计与搭建。
关键词:健康检测;晨检;stm32一、研究背景人工晨检大约需要为30秒至1分钟左右,在晨检期间需要其他辅助设备相对的复杂。
孩子做完晨检后要人工记录晨检的数据。
由于数据无法实时推送,家长无法即时了解孩子上午和下午的检查情况。
人工晨检仅有单纯的数字记录而无照片可供查阅,对后续溯源不利[1]。
如需将手工记录晨检数据上传,工作人员需将数据输入电脑中,再将其保存起来发给有关工作人员。
这一操作既烦琐又浪费人力,在无形之中加大了员工工作量。
为了提高晨检效率,减轻工作人员的工作量,实现对晨检数据的实时推送和保存。
晨检机可独自完成晨检工作,在不知不觉中提高晨检效率并减少教师工作量。
二、硬件选型本设计选择STM32F103C8T6作为主控芯片,STM32F103C8T6具有高性能三十二位RISC内核,七十二兆赫工作频率,内置高效速率存储器,增强型I/O端口,外设与2条总线相连。
传感器选应HX711,它是一款高精度电子秤专用的24位A/D转换器芯片。
相较于同类芯片,该芯片融合了稳压电源、片内时钟振荡器等同类芯片所需的周边电路,呈现出高度集成化、快速响应和强大的抗干扰能力。
本设计用新型降低了电子秤的整机成本,且整机运行可靠。
红外测温模块选应GY-906里的测温模块MLX90614,作为一种红外测温装置实际用起来也相对便捷,其全部模块都是在出厂前进行校验,并且可以直接输出线性或准线性信号,互换性较好,免去了复杂的修正过程。
基于STM32普及型变电站智能巡检机器人的设计
1 引言各行各业中,电力产业对人们的生产生活起着至关重要的作用。
其中变电站是电力输送和电能分配中的重要环节,不仅控制着电流和电压的大小、方向,还承担着将电能分配到千家万户的重任[1]。
随着变电站规模的不断扩大,巡检的项目和难度越来越大,采用传统人工巡检的方式,工作效率容易受到巡检人员主观经验和技术水平的限制,同时巡检人员长期工作于这样的环境下,会造成神经疲劳、精神衰弱、精神抑郁,增加中枢神经系统疾病、心脏病、心血管等疾病的患病概率。
因此,普及巡检机器人在变电站的应用,来代替巡视人员实现变电站的巡视检查,不但可节省开支,也是保障巡检工作者身体健康的现实所需[2,3]。
早在很多年前国内外的科学家们就已经开展对变电站巡检机器人的研究。
2000年加拿大科学家研制了一款轮式机器人,搭载了红外热成像仪和高清摄像头,可以实现远程操控[4];2012年梅西大学和新西兰电网公司联合研制了一基于STM32普及型变电站智能巡检机器人的设计太原科技大学电子信息工程学院 孙宏发 李昕涛 韩增强摘 要作为智能电网的核心环节,智能变电站备受关注,开发普适性巡检机器人成为推进变电站智能化的动力。
本文采用通用型嵌入式系统来构建动力系统,同时搭载高清摄像头和红外光感元件实现图像的采集;并设计运动控制算法和视觉算法,研制出巡检机器人样机,进行了室内巡航实验和爬坡稳定性实验,验证了各传感器模块和人机交互界面运行的稳定性。
实验表明,本文设计的机器人可以满足基本的运行要求,为后期研制普及型巡检机器人打下坚实的理论与实践基础。
关键词变电站;巡检机器人;电磁寻迹;卷积神经网络款搭载超声波传感器防碰撞结构且能进行高清视频和图像回传到工作后台的巡检机器人,可以实现变电站整个地形的全面巡检[5,6]。
同时,近年来国内变电站巡检机器人的研究也在如火如荼的进行。
例如2015年深圳市朗驰欣创科技股份有限公司研制出一款可以自主导航定位、自主巡航、自主充电的机器人,搭载了红外热成像和高清摄像头设备,能够实现识别设备仪表的实时参数,发现电流、电压过高导致的过热以及其他故障[7];2017年,中国亿嘉和科技有限公司推出了一款采用全自动激光定位与导航、全驱全动、可以感知到障碍物并轻松越过障碍物的全新机器人[8,9]。
基于STM32普及型变电站智能巡检机器人设计

基于STM32普及型变电站智能巡检机器人设计摘要:电力系统的安全高效运转,对我国经济发展具有非常重要的作用。
而电力系统中,变电站是其最重要最关键的部分之一;设计开发变电站智能巡检机器人系统对电力系统的安全、高效、可靠运行具有一定的应用价值。
针对变电站重要性、特殊性、危险性等特点,本文设计了一款适用于变电站的智能巡检机器人系统,并着重对机器人巡检车体及运动控制系统进行阐述。
关键词:变电站;智能巡检机器人;运动控制系统;无线网桥设计开发变电站智能巡检机器人系统作人员可通过远程监控室,不仅对现场机器人巡检车体(以下简称车体)的运动进行控制,而且对车体的视频和红外设备进行控制。
首先车体能够沿着导航设定的路线进行巡检,并根据导航系统对待检设备进行智能精准定位;其次通过红外热成像仪和可见光摄像机等成像系统对变电站设备的运行状态进行分析检测,并将检测数据传送至监控中心(包括远程监控室和本地监控室);最后将检测设备进行故障报警,并采取相应措施。
2 方案设计2.1 整体框架设计智能巡检机器人系统,既要安全可靠地完成巡检任务,在一定程度上减轻工作人员的巡检工作量,又要不破坏变电站任何装置、不影响电气设备的正常运行。
整个系统由五大部分组成:变电站远程监控室、本地监控室、充电房、无线网络和机器人巡检车体;具体如图 1所示。
其中变电站监控室主要功能是对巡检现场的情况进行监控;本地监控室不仅能够通过上传的视频和红外图像对设备进行监控,并能通过电子地图来展现车体巡检的工作过程;同时,本地监控室把所有监测数据上传远程监控室,使远程监控室时时掌握变电站的运行状况。
图1 整体框架设计语音功能设计主要包括:双向智能语音(喊话和对讲)传输功能。
自主充电功能设计主要包括:电池供电一次充电续航能力不小于 5 h,电池电量不足时车体自动返回充电室完成自主充电。
巡检方式设置和切换功能设计主要包括:巡检系统包括人工辅助遥控巡检及全自动巡检两种巡检方式。
基于stm32单片机多功能探测巡检车的设计
• 208•ELECTRONICS WORLD ・技术交流近年来,智能小车与我们生活越来越紧密相关,智能技术日渐成熟。
多功能探测巡检车的优点在于适用范围广,便捷灵活,节能、环保、无污染、体积小、能源利用率高,符合绿色新理念。
而且具有重要的军事、民用及科研价值。
0 引言随着新材料、新能源、微电子以及传感器技术的发展,多功能无人车迅猛发展,使得无人车成本降低,理论的不断完善使得无人车制作相对简易,可以很轻易的提升其功能。
多功能探测巡检车是以stm32单片机作为控制核心,并辅以其它功能模块电路所组成。
现如今国内的智能化发展速度极快,无人科技方面也有极大的发展空间,其在人工智能领域占有很重要的作用。
智能小车应用范围非常广泛,小到餐饮服务业,大到太空勘探,都可将其应用其中,大大提高了工作效率,节约人工成本,同时也会让人们的生活越来越智能化。
现国内智能小车已有实际的应用,例如哈工大的导游机器人,沈阳自动化所的AGV 小车以及上海的导购机器人等等(徐鹏,梁曼,魏萍,张海玲,基于Arduino/Android 的小车蓝牙控制系统的设计与实现[J].微型机与应用,2017,36)。
相信在不久的将来会被广泛普及。
1 系统总体方案 多功能探测巡检车是以stm32单片机作为控制核心,采用的是模块化设计,整个系统由上位机系统和下位机系统组成(彭玉青,李木,张媛媛,基于改进模糊算法的移动机器人避障[J].计算机应用,2015,35)。
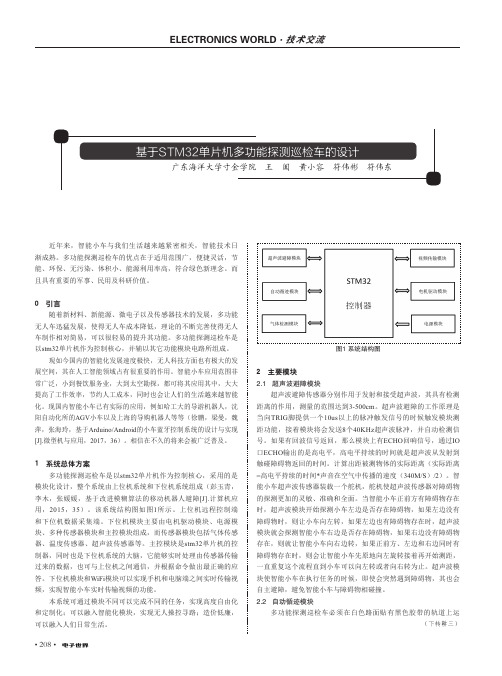
该系统结构图如图1所示。
上位机远程控制端和下位机数据采集端。
下位机模块主要由电机驱动模块、电源模块、多种传感器模块和主控模块组成,而传感器模块包括气体传感器、温度传感器、超声波传感器等。
主控模块是stm32单片机的控制器,同时也是下位机系统的大脑,它能够实时处理由传感器传输过来的数据,也可与上位机之间通信,并根据命令做出最正确的应答。
下位机模块和WiFi 模块可以实现手机和电脑端之间实时传输视频,实现智能小车实时传输视频的功能。
基于STM32的扫地机器人控制系统设计
基于STM32的扫地机器人控制系统设计基于STM32的扫地机器人控制系统设计随着科技的不断进步,机器人已经广泛应用于各个领域,其中扫地机器人作为家庭和办公场所的清洁助手备受欢迎。
为了实现扫地机器人精确的定位和控制,本文将设计一种基于STM32的扫地机器人控制系统。
一、系统设计方案扫地机器人的主要功能是通过传感器和控制系统实现对环境的感知和控制,完成清扫任务。
基于此,本系统设计方案如下:1.硬件设计:选择STM32作为主控芯片,它具有强大的处理能力和丰富的外设接口。
另外,还需要选择合适的电机驱动、传感器和扫地装置等设备。
利用电机驱动实现机器人的运动控制,通过传感器感知环境信息,然后通过扫地装置进行清扫。
2.软件设计:设计合理的软件架构,包括底层驱动程序、中间层控制算法和上层应用程序。
底层驱动程序主要负责与硬件设备的交互,包括电机驱动、传感器数据采集等。
中间层控制算法根据传感器数据实现机器人的定位和路径规划等功能。
上层应用程序通过与用户交互,实现对机器人清扫任务的控制和管理。
二、系统实现过程在实现扫地机器人控制系统时,需要按照以下步骤进行: 1.硬件连接:将选定的电机驱动、传感器和扫地装置等设备按照引脚定义进行连接,并使用合适的电源供电。
2.编写底层驱动程序:根据设备的规格说明编写底层驱动程序,实现与硬件设备的交互。
例如,使用PWM信号控制电机的速度和方向,使用ADC采集传感器数据等。
3.设计控制算法:根据实际需求,设计合适的控制算法。
例如,使用传感器数据进行环境感知和机器人定位,使用路径规划算法确定机器人的清扫路径等。
4.实现上层应用程序:设计用户界面,实现用户与机器人的交互。
例如,使用按钮或触摸屏控制机器人的启动、停止和清扫模式切换等。
5.调试和测试:完成软硬件的连接后,进行系统的调试和功能测试。
根据测试结果对系统进行优化和改进。
三、系统优化与改进在实际应用过程中,可以根据用户的反馈和需求对扫地机器人的功能进行优化和改进。
基于PID的STM32智能小车机器人的设计

基于PID的STM32智能小车机器人的设计
一、背景简介
随着科技的进步,智能机器人以其灵活且准确的移动技术,已经成为
未来工业自动化及生活中使用的重要装置。
STM32是一款32位微控制器,它具有低成本、低功耗等优点,且易于开发,因此它正在成为自动化光机
器人和其他智能系统的常用控制芯片。
本研究以STM32为核心智能控制器,设计一种基于PID的智能小车机
器人,用于工业全自动化技术,及仿真技术。
通过实验操作,验证此基于PID的STM32智能小车机器人是否具有准确、灵活的移动能力,能够有效
完成定点巡视、遥控等工作任务,达到实时地获取、传输、处理自动控制
的目的。
二、设计内容
2.1STM32控制器硬件选型
本文选择STM32F103C8T6单片机作为PID控制小车机器人的控制核心,采用48引脚封装,外形尺寸为LQFP48、STM32F103C8T6采用ARM
Cortex-M3内核架构,最高时钟频率72MHz,具有128KB读出闪存、20KB SRAM ,外设有12位ADC、USART、CAN、I2C、SPI等。
2.2STM32软件设计
(1)电机驱动软件设计:本设计采用电机驱动电路,电机有4个,
具有分离式驱动结构,采用STM32作为控制器,通过PWM脉冲实现电机的
正反转,从而实现小车机器人的控制,并可实现速度的精确控制。
基于STM32的变电站巡检机器人系统设计
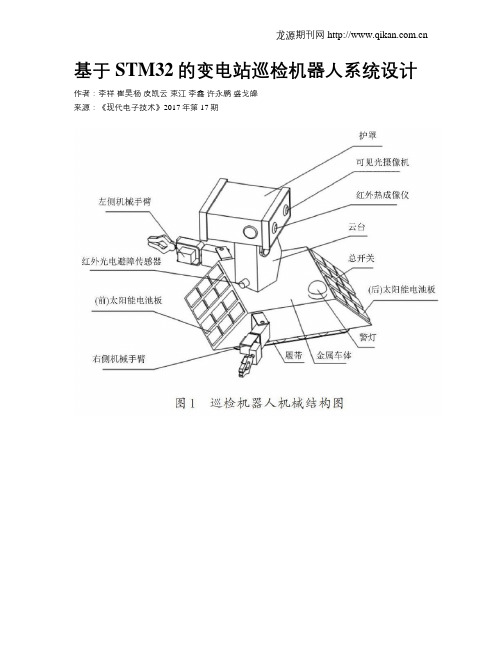
基于STM32的变电站巡检机器人系统设计作者:李祥崔昊杨皮凯云束江李鑫许永鹏盛戈皞来源:《现代电子技术》2017年第17期摘要:针对变电站传统人工巡检方式存在工作量大、缺乏系统分析和实时故障分析等缺点,设计了基于STM32芯片的变电站智能巡检机器人,具有自主循迹、智能诊断分析、太阳能充电、机械手臂及时切除故障等功能。
详细阐述了硬件结构和软件算法设计方案,研制出巡检机器人样机,并对样机通信系统、控制系统、智能识别诊断系统进行了测试分析。
测试结果表明,该巡检机器人系统能够对电力设备进行有效巡检与故障诊断,巡检效率高、安全性可靠,因此具有较高的经济效益和较强的现实意义。
关键词:变电站;巡检机器人;太阳能;机械手臂;红外检测中图分类号: TN02⁃34 文献标识码: A 文章编号: 1004⁃373X(2017)17⁃0150⁃04 Design of substation inspection robot system based on STM32LI Xiang1, CUI Haoyang1, PI Kaiyun1, SHU Jiang1, LI Xin1, XU Yongpeng2,SHENG Gehao2(1. College of Electronics and Information Engineering, Shanghai University of Electric Power, Shanghai 200090, China;2. Department of Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240,China)Abstract: Since the traditional manual inspection method of substation has the disadvantage of heavy workload, and lacks of systematic analysis and real⁃time fault analysis, an intelligent substation inspection robot based on STM32 was designed, which has functions of automatic tracking, intelligent diagnosis analysis, solar energy recharging, and timely fault removal bymechanical arms. In this paper, the design schemes of hardware structure and software algorithm are elaborated in detail, and the test analysis for its communication system, control system, and intelligent identification and diagnosis system is performed. The test result shows this robot can inspect the electric equipment and diagnose the fault efficiently, and has high inspection efficiency and reliable security. Therefore, it brings a high economic benefit and has strong practical significance.Keywords: substation; inspection robot; solar energy; mechanical arm; infrared detection0 引言目前,電力设备向高功率、高可靠性、高智能化方向发展,增加了日常运维与检测的难度。
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断进步和人工智能的广泛普及,智能扫地机器人已经成为了家庭生活的一部分。
基于这样的时代背景,本文以STM32作为主控芯片,探讨扫地机器人的设计与实现,以提高机器人的清洁效率和智能化水平。
二、系统概述本系统以STM32微控制器为核心,通过集成电机驱动、传感器模块、电源模块等,实现扫地机器人的自动扫地、避障、充电等功能。
系统采用模块化设计,便于后期维护和升级。
三、硬件设计1. 主控芯片选型:STM32微控制器。
其具备高性能、低功耗、高集成度等优点,适合用于扫地机器人等智能设备。
2. 电机驱动模块:采用直流电机和电机驱动芯片,实现扫地机器人的运动控制。
3. 传感器模块:包括红外传感器、超声波传感器等,用于实现避障、测距等功能。
4. 电源模块:为系统提供稳定的电源供应,包括电池管理和充电管理等功能。
四、软件设计1. 操作系统与开发环境:采用嵌入式操作系统,如RT-Thread等,为软件开发提供良好的环境。
2. 算法实现:通过优化扫地算法和路径规划算法,提高机器人的清洁效率和智能化水平。
3. 通信协议:设计合理的通信协议,实现扫地机器人与上位机之间的数据传输和指令控制。
五、功能实现1. 自动扫地:通过电机驱动模块和传感器模块,实现扫地机器人的自动扫地功能。
2. 避障功能:利用红外传感器和超声波传感器等,实现扫地机器人的避障功能,避免在清洁过程中碰到家具等障碍物。
3. 充电功能:当电池电量低时,扫地机器人可自动返回充电座进行充电。
4. 路径规划:通过优化算法,实现扫地机器人的高效路径规划,提高清洁效率。
六、实验与测试为了验证本设计的可行性和性能,我们进行了大量的实验和测试。
实验结果表明,本设计的扫地机器人具有较高的清洁效率和智能化水平,能够有效地完成自动扫地、避障、充电等功能。
同时,我们还对系统的稳定性和可靠性进行了测试,结果表明系统具有良好的性能和稳定性。
基于STM32的轨道式巡检机器人控制系统的设计

㊀2020年㊀第9期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2020㊀No.9㊀收稿日期:2019-07-22基于STM32的轨道式巡检机器人控制系统的设计张申毅1,樊绍胜1,程嘉翊1,黄㊀辉2(1.长沙理工大学电气与信息工程学院,湖南长沙㊀410114;2.湖南省中南桥梁安装工程有限公司,湖南怀化㊀418000)㊀㊀摘要:为了满足地下综合管廊智能化巡检的需求及弥补传统人工巡检作业的缺陷,设计了一种基于STM32的轨道式巡检机器人控制系统㊂该系统采用STM32F407ZGT6作为微处理器,通过AD采样㊁光耦隔离㊁RS485通信等模块对传感器及里程计信号进行处理㊂采用速度-位置双模式匹配运动控制方法与模糊控制器提高定位精度与响应速度㊂同时用QT开发框架设计了上位机监控界面,可实时监控机器人的运动状态与传感器数据㊂实验表明,使用该系统控制的机器人具有定位精度高,响应速度快等优点㊂关键词:地下综合管廊;巡检机器人;STM32;控制系统;磁性开关;模糊控制器中图分类号:TP242㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2020)09-0093-05DesignofRailTypeInspectionRobotControlSystemBasedonSTM32ZHANGShen⁃yi1,FANShao⁃sheng1,CHENGJia⁃yi1,HUANGHui2(1.CollegeofElectricalandInformationEngineering,ChangshaUniversityofScienceandTechnology,Changsha410114,China;2.HunanZhongnanBridgeInstallationEngineeringCo.,Ltd.,Huaihua418000,China)Abstract:Inordertomeettherequirementsofintelligentinspectionofundergroundpipegalleryandmakeupforthedefectsoftraditionalmanualinspectionoperations,arailtypeinspectionrobotcontrolsystembasedonSTM32wasdesigned.ThesystemtookSTM32F407ZGT6asmicroprocessortoprocessessensorandodometersignalsthroughADsamplingcircuit,opticalcouplingisolationcircuitandRS485communicationcircuit.Thevelocity⁃positiondual⁃modematchingmotioncontrolmethodandthefuzzycontrollerwereusedtoimprovethepositioningaccuracyandresponsespeed.Atthesametime,themonitorinterfacewasdesignedwithQTdevelopmentframework,whichcanmonitorthemotionstateandsensordataoftherobotinrealtime.Theexperimentalre⁃sultshowsthattherobotcontrolledbythissystemhastheadvantagesofhighpositioningaccuracyandfastresponsespeed.Keywords:undergroundpipegallery;inspectionrobot;STM32;controlsystem;magneticswitch;fuzzycontroller0㊀引言城市发展面临地下供电㊁通信㊁给排水㊁供气等管道交错复杂㊁维护不便等困难㊂地下综合管廊集成了电力㊁通信㊁燃气㊁给排水等各种工程管道㊂地下综合管廊运维压力大,地下综合管廊空间狭长㊁管线密布,传统的人工检查效率低㊁无法发现各种细微故障;综合管廊往往温度较高㊁湿度较大,有时还会积聚毒害气体,作业环境比较恶劣;除此之外,人工巡检效率较低,巡检间隔较长,难以获知地下管线和相关设备的运行状况㊂鉴于地下综合管廊人工巡检的缺陷与不足,使用轨道式机器人代替人工进行日常检查成为研究热点㊂因此,本文设计了一种基于STM32的轨道式巡检机器人控制系统,该控制系统具有安全性能好㊁定位精度高㊁响应速度快等优点㊂1㊀机器人控制系统总体设计轨道式巡检机器人的结构示意图如图1和图2所示:机器人主要由3部分组成:顶部的行走部分,中部的控制部分和底部的工作部分㊂图1㊀轨道式巡检机器人侧面示意图轨道式巡检机器人的控制系统总体架构如图3所㊀㊀㊀㊀㊀94㊀InstrumentTechniqueandSensorSep.2020㊀图2㊀轨道式巡检机器人正面示意图图3㊀轨道式机器人总体框图示㊂该系统包括STM32微处理器及其最小系统㊁电源㊁CAN总线通信㊁光耦隔离㊁AD采样㊁485总线通信以及以太网通信等模块㊂主控模块主要完成的功能为:与上位机监控界面进行信息交互,接收㊁解析上位机监控系统发出的指令并分发至对应的任务线程执行相应操作;收集并整理各传感器数据㊁电机运行数据和机器人位置数据并实时发送至上位机㊂感知单元主要包括温度传感器㊁可燃性气体模组㊁超声波雷达和电流传感器组成;定位模块主要包括500线3通道增量式里程计㊁磁性开关㊁RFID收发器㊂电源模块包括48V锂电池㊁24V/12V/5V3个电压等级的直流降压模块㊁无线充电模块接收端㊂2㊀系统硬件设计轨道式巡检机器人控制系统硬件部分主要分为微处理器以及信号调理电路设计[1]㊂2.1㊀微处理器微处理器采用STM32F407ZGT6单片机[2]㊂该型微处理器具有32位高性能ARMCortex-M4处理器和强大的时钟系统,其频率可达168MHz;拥有丰富的I/O口资源㊂在本设计中主要用到的I/O口有:(1)5个AD采样端口,分别对机器人前/后超声波雷达㊁锂电池电压㊁充放电回路电流进行采样与处理;(2)8个逻辑输出端口,主要控制行走电机㊁关节电机与前/后LED探照灯㊁无线充电等设备固态继电器的通断;(3)2个485总线通信接口,分别与RFID收发器和气体传感器模组通信;(4)1个CAN总线通信接口,向行走电机㊁二自由度机械臂关节电机进行通信㊂2.2㊀AD采样电路由于微处理器I/O口只允许输入最高3.3V电压,故需要对机器人各传感器输出信号进行分压与隔离采样㊂图4为0 5V隔离采样电路,该电路由分压电路与电压跟随器组成[3],为保证在输入较低电压的同时电压跟随电路也能准确跟随,同时考虑简化电路设计而尽量避免采用双电源供电,故选取AD806搭建电压跟随电路,该芯片采用5 24V单电源供电,能够轨至轨输出,具有低噪声,高共模抑制比等优点㊂图4㊀电压隔离采样电路R801与R802构成分压电路,取R801=10kΩ㊁R802=15kΩ,分压公式为V+=Vain㊃R802R801+R802(1)经分压电路后,0 5V输入信号将线性转换为0 3V㊂分压电阻均采用高精密低温漂贴片电阻以确保电压采样的精确度㊂电压跟随器对分压后的信号进行隔离,其中D801为3.3V齐纳二极管,用于过压保护,防止因AD采样电路输入电压过大或因干扰产生的过电压导致微处理器损坏㊂光耦隔离电路如图5所示㊂2.3㊀RS485通信电路轨道式巡检机器人配置2路RS485与气体传感器模组和RFID收发器进行通信,RS485通信电路如图6所示㊂本设计中采用致RS3485HT模块,该模块㊀㊀㊀㊀㊀第9期张申毅等:基于STM32的轨道式巡检机器人控制系统的设计95㊀㊀图5㊀光耦隔离电路具有自动收发数据功能,集成电源隔离㊁电气隔离于一体,隔离耐压达2500VDC,包含发送引脚及接收引脚,无需控制引脚即可实现自动换向功能㊂为了防止485总线出现瞬时过压,485模块A㊁B和RGND引脚均增加了TVS管D301㊁D302和D303进行过压保护㊂图6㊀RS485通信电路3㊀系统软件设计轨道式巡检机器人控制系统软件包括下位机底层控制软件和上位机监控软件设计两部分[4]㊂3.1㊀下位机底层控制程序软件设计3.1.1㊀控制程序软件设计FreeRTOS是一个可裁剪㊁可剥夺型的多任务内核㊂FreeRTOS提供实时操作系统所需的所有功能,包括资源管理,同步,任务通信等[5]㊂在STM32F407ZGT6主控制板中搭载FreeRTOS实时操作系统可以基本上满足系统需要,根据轨道式巡检机器人各个模块的作业任务的不同可相应地在主控程序中创建多个线程分别进行处理,合理配置各个线程的优先级顺序㊂机器人主控软件设计包括一个主线程及实时操作系统所创建的通信㊁感知与定位3个功能子线程㊂主控制板程序流程如图7所示㊂机器人程序启动后,先初始化各模块,然后创建3个子线程分别为负责TCP通信㊁机器人感知和机器人定位㊂TCP通信子线程与上位机建立并保持通信,接收并解析上位机指令,再加载相应的功能子线程;感知子线程采集监测各传感器数据,并在给定周期内向上位机上传数据包;定位子线程通过CAN总线向行走图7㊀主程序流程图电机,并通过RFID收发器与磁性开关对机器人进行精确定位,到达指定检测点后向机械臂关节电机下达角度运动命令对周围管线或设备进行拍照㊁录像㊁数据采集等操作㊂3.1.2㊀机器人巡检程序软件设计机器人在开机之后即开始对运动模块㊁感知模块与定位模块等进行初始化操作㊂在未接收到上位机下达的指令时,机器人处于休眠状态,只保持TCP通信子线程处于工作状态㊂当接收到巡检指令后,机器人唤醒感知与定位子程序并开始巡检作业㊂机器人按照给定的目标点行进,行进过程中若感知到周围出现异常参数时,则立刻上传异常参数与当前所在位置㊂若上位机下达继续巡检指令,则机器人继续向目标巡检点行进,达到巡检点后再次上传各参数与图片㊂机器人巡检程序流程如图8所示㊂3.2㊀上位机监控软件轨道式巡检机器人的上位机测控软件在VisualStudio2017软件中使用QT开发框架编写,并根据巡检作业要求制定上位机软件界面㊂上位机监控软件界面如图9所示:上位机窗口最右侧为机器人操作区域,从上到下分别为启停控制区(启动㊁停止㊁重启㊁充电)㊁行走电机控制区(前进㊁后退㊁停止)㊁机械臂控制区(旋转㊁复位)㊁双目云台控制区(复位㊁拍照㊁录视㊀㊀㊀㊀㊀96㊀InstrumentTechniqueandSensorSep.2020㊀图8㊀机器人巡检程序流程图频);界面中间为机器人实时位置㊁实时速度显示区与双目云台视频显示区;上位机窗口最左侧分别为机器人状态显示区与定位设定区㊂图9㊀主机监控软件界面图4㊀精准定位控制器设计传统的轨道式巡检机器人在定位方式上采用单独里程计或配合RFID收发器进行定位㊂采用单独里程计进行定位时,由于增量式里程计存在累积误差,随着机器人的不断行进必然会导致定位误差不断累积,因此该定位方法精度较低;采用RFID收发器的定位方式时,虽然RFID定位准确度较高但由于机器人巡检距离较长导致RFID标签的布置成本较高㊂综合考虑后,从里程计累积误差的校正以及模糊控制器的设计2个角度提高机器人的定位精度与响应速度㊂4.1㊀速度-位置双模式匹配运动控制方法本文提出了一种速度-位置双模式匹配运动控制方法用于校正里程计的累积误差㊂速度-位置双模式匹配运动控制方法示意图如图10所示㊂在轨道式机器人悬挂的工字轨道上每间隔1m打入1颗定位螺钉,机器人搭载的磁性开关每靠近定位螺钉则产生一次触发信号,微处理器通过磁性开关的触发信号对里程计数据进行清零以消除累积误差㊂在管廊的重要巡检点布置RFID标签以提高机器人定图10㊀速度-位置双模式匹配运动控制方法示意图位系统的可靠性㊂当机器人获知上位机控制系统下达的目标行驶里程后即对目标里程进行速度-位置模式匹配:将目标里程分为速度模式下行进与位置模式下行进2个区间,并依靠磁性开关的触发信号判断速度-位置行进区间的切换点㊂当机器人行走至给定目标点前一个螺钉时,微处理器通过向行走电机发送停止指令再切换为位置模式下行走剩余里程㊂速度-位置双模式匹配运动控制方法流程图如图11所示㊂图11㊀速度-位置双模式匹配运动控制方法流程图4.2㊀模糊控制器设计机器人定位精度除了与增量式里程计的累积误差有关外,还与当前行进速度密切关联㊂进行精确定位时若行进速度过快,由于机械结构及惯性作用导致机器人在停止过程中出现打滑;若行进速度过慢,机器人行进至目标点所需时间过长,实用性无法满足㊂因此,设计单输入单输出形式的模糊控制器实现行进速度跟随当前位置距离目标点的误差进行相应调整㊂4.2.1㊀输入输出变量的确定设机器人当前位置与目标位置的里程误差为,作为模糊控制器输入量[6]㊂里程误差e的基本域是[-20m,20m],模糊域选择为[-3,3]㊂取机器人在速度-位置双模式匹配运动控制过程中速度模式区间下的行进速度为v,作为模糊控制器输出量㊂取速度v㊀㊀㊀㊀㊀第9期张申毅等:基于STM32的轨道式巡检机器人控制系统的设计97㊀㊀的基本论域为[-80cm/s,80cm/s],模糊论域选择为[-6,6]㊂取输入量e的模糊子集为{负远程,负中程,负近程,零,正近程,正中程,正远程},用符号简记为{NF,NM,NN,ZO,PN,PM,PF}㊂取输出变量γ的模糊子集为{负快速,负中速,负慢速,零,正慢速,正中速,正快速},用符号简记为{NQ,NM,NS,ZO,PS,PM,PQ}㊂为简化计算,输入量e与输出量v均采用三角形隶属度函数[7]㊂各变量的隶属度函数如图12以及图13所示㊂图12㊀输入量隶属度函数图13㊀输出量隶属度函数4.2.2㊀模糊控制规则的设计模糊控制规则如表1所示㊂进行精确定位时,机器人行进速度主要取决于当前位置到目标位置的里程误差[8],当机器人远离目标点时,行进速度相应地越大,提高响应速度;机器人靠近目标点附近时,行进速度进行相应调整,以便精确定位;机器人接近目标点时,行进速度相应较慢,防止较大速度下因惯性作用出现的打滑㊂表1㊀模糊规则表eNFNMNNZOPNPMPFvNQNMNNZOPSPMPQ5㊀机器人样机试验与结果分析为了测试机器人的定位精度误差与响应速度,需要对机器人进行检测[9]㊂实验平台为长度40m的工字轨道,在工字轨道上每间隔1m打入1颗定位螺钉,在该平台上对机器人进行实验㊂5.1㊀机器人样机精确定位实验在实验中通过向机器人给定目标位置,再测量机器人实际行驶里程与相应时间,精确定位实验结果如表2所示㊂由实验结果可知:机器人定位最大误差不超过3cm,定位精度高,响应时间快,平均速度可跟随里程变化而变化㊂表2㊀机器人精确实验结果设定里程/m响应时间/s平均速度/(m㊃s-1)实际里程/m误差/cm5.5015.80.345.511.010.5027.20.3810.50015.5034.50.4515.533.020.5039.70.5220.533.025.5043.20.5925.48-2.030.5047.80.6430.522.05.2㊀机器人实际作业效果在确定机器人精确定位功能满足要求后,下一步对机器人进行实际巡检作业进行测试,检测机器人能否实时上传环境参数,能否对异常参数进行预警,并能准确定位故障点,能否有效检测电缆等设备过热㊂实验结果表明,使用本控制系统的轨道式机器人可高效㊁自动地完成地下综合管廊的巡检任务㊂实际作业效果如图14所示㊂图14㊀机器人实际巡检效果(下转第116页)㊀㊀㊀㊀㊀116㊀InstrumentTechniqueandSensorSep.2020㊀图7㊀扭矩重复性测试曲线动态预测和幅空转换的转轴扭矩测量方法㊂采用两路磁电式或光电反射式模拟输出传感器和对应的固定在被测转轴上的色标带,将扭转角转化为求取两路正弦信号的相位差,实现了转轴扭矩载荷的非接触式测量㊂重点对该系统实现的正弦曲线动态预测和幅空转换细分这一关键技术进行了研究,通过实验测试验证了本文方法的可行性和有效性㊂从原理上克服了传统脉冲相位差检测方法的局限性,可以显著提高测试系统动态特性,并可随时在线进行零位识别和校准,从而方便现场的安装和调校㊂参考文献:[1]㊀张占鹏,白素平,闫钰锋.基于光纤的扭矩传感器新型结构设计[J],光通信技术,2019,43(3):1002-5561.[2]㊀逄金鑫,潘海林,张清,等.基于转角差法的扭矩传感器设计[J].仪表技术与传感器,2015(10):13-15.[3]㊀丁珍红,吉小军,刘月华.一种轴扭转变形动态测量系统的设计及实现[J].中国机械工程,2011,22(14):1672-1675.[4]㊀王其飞,崔炫,基于相位差的转矩转速测量原理与设计[J].自动化与仪器仪表,2010(4):54-56.[5]㊀刘翔,黄文平,牛慧萍,等.基于相位差的转轴扭矩测量中的零位识别与处理[J].宇航计测技术,2018,38(4):53-58.[6]㊀申莎莎.基于小波变换与傅里叶变换对比分析及其在信号去噪中的应用[J].山西师范大学学报(自然科学版),2018,32(3):32-37.[7]㊀张旭东,詹毅,马永琴.不同信号的小波变换去噪方法[J].石油地球物理勘探,2007,42(增刊):118-123.[8]㊀梁志国,朱济杰,孟晓风.四参数正弦曲线拟合的一种收敛算法[J].仪器仪表学报,2006,27(11):1513-1519.[9]㊀芦文波,韩韬,施文康,等.提取正弦信号参数的非线性寻优最小二乘算法[J].上海交通大学学报,2003,37(10):1613-1615.[10]㊀王宝珠,费莉,李文娟,等.基于时空域变换和动态预测的光栅信号细分方法[J].工具技术,2019,53(1):134-137.[11]㊀冯济琴,刘浩,陈自然,等.基于域变换和灰色预测的光栅信号软细分方法[J].仪器仪表学报,2016,37(2):263-269.作者简介:黄文平(1994 ),硕士研究生,主要研究方向为扭矩测量㊂E⁃mail:1065355670@qq.com通讯作者:吉小军(1969 ),博士,教授,主要研究方向为新型传感器和特种测试技术㊂E⁃mail:jxj127@sjtu edu cn(上接第97页)6㊀结束语开发了一种基于STM32的轨道式巡检机器人控制系统并对其进行了测试㊂该系统采用STM32F407ZGT6为微处理器,内嵌FreeRTOS操作系统㊂采用上下位机结构并通过以太网通信实现远程无线信息交互㊂根据传统轨道式巡检机器人定位精度不足等缺点,提出了一种速度-位置双模式匹配运动控制方法并设计了模糊控制器以提高机器人定位精度与响应速度㊂实验测试表明该系统能够精确㊁快速实现定位,能够有效弥补人工作业的不足,提高了地下综合管廊巡检作业智能化程度㊂参考文献:[1]㊀鲜开义.变电站轨道式巡检机器人控制系统设计[D].成都:西南交通大学,2018.[2]㊀李智.扑翼飞行机器人控制系统的设计研究[D].北京:北方工业大学,2016.[3]㊀于吉刚,杨录,张艳花.便携式隐藏焊缝超声检测系统设计[J].仪表技术与传感器,2015(12):85-87.[4]㊀齐诗萌,闵华松,黄文晖.基于步进电机的机器人夹持器控制系统设计[J].仪表技术与传感器,2018(9):61-65.[5]㊀王金海,国海丁,王慧泉,等.互联网+下的云健康监护系统设计[J].仪器仪表学报,2016,37(S1):88-93.[6]㊀张星.基于麦克纳姆轮的全向AGV运动控制技术研究[D].重庆:重庆大学,2016.[7]㊀王继,袁宇浩.基于模糊PID的循环水站恒压供水系统的设计与仿真[J].仪表技术与传感器,2016(3):97-99.[8]㊀吴敬阳.基于激光雷达定位导航的多自主移动机器人系统研制[D].哈尔滨:哈尔滨工业大学,2017.[9]㊀何成林.基于红外强度定位对接的自重构机器人实验研究[D].哈尔滨:哈尔滨工业大学,2016.作者简介:张申毅(1995 ),硕士研究生,主要研究领域为电力机器人㊁嵌入式系统开发㊂E⁃mail:545641546@qq.com樊绍胜(1966 ),博士,教授,硕士生导师,主要研究领域为电力特种机器人㊁电力设备状态监测㊁机器视觉等㊂。
基于stm32的智能循迹机器人的设计
外接收器和一个电源管脚构成。
SIG 红外接收器的信号引脚与单片机 I/O 口相连,单片机只需接收 SIG信号就可判断当前检测到的是否为黑线,使用十分方便。
智能循迹机器人共使用在实际设计中需要在前方 QTI 贴上一层贴纸用于遮光,防止外界光线干扰 QTI 传感器检测黑线。
不用贴遮光纸,因为后方 QTI 位于车体的下方,车体起到遮光的作用。
4.2 RFID 读卡器模块读卡器安装在智能循迹机器人的底部。
由于只能机器人连接的外部设备较多,如果使用开发板给 RFID 读卡器供电会出现供电不足,读卡器无法正常读卡的现象。
所以使用模块供电的方式会比较好。
为 RFID 读卡器供电的独立电源 STM32 开发板共用接地,即独立电源的负极的地相连[8]。
4.3 语音播报模块5 软件设计5.1 程序结构以及算法分析系统初始化后,利用 QTI 传感器检测地图上的黑线,以 0/1 的信号方式发送给 STM32 单片机。
单片机接收到信号后,对 4 路信号进行累加,将其转化图 1 系统整体构成图 2 QTI 传感器接口图 3 QTI 传感器摆放位置图 4 WT588D 语音播报模块图 5 串口屏工作原理46 集成电路应用 第37卷第2期(总第317期)2020年2了转角后,将转角利用测定好的系数转化成电机转动的次数,这样便可以实现机器人准确转向[9-13]。
5.2.2 转动角度计算设 A(x1,y1) 为上一个结点,B(x2,y2) 为当前结点,C(x3,y3) 为下一个结点。
由图 7 可得式(1)。
并由式(2)可以计算出∠α为式(5.2.3 转动方向判定计算向量 AB 与 X 轴正方向构成的∠α,向量与 X 轴正方向构成的角∠β。
设∠θ=∠α-∠β,当θ在 0~π或者 -θ≥π的时候,即6 结语图 6 程序流程图 7 基于坐标系的结点分析。
基于STM32单片机的智能巡线小车的设计

基于STM32单片机的智能巡线小车的设计概述本文档介绍了一种基于STM32单片机的智能巡线小车的设计方案。
该方案旨在实现小车在固定轨道上自动巡线的功能,通过使用STM32单片机和传感器模块,实现对线路的检测和控制,进而实现小车的自主导航。
硬件设计智能巡线小车的硬件设计主要包括以下几个方面:1. STM32单片机:选择适合的STM32单片机作为主控芯片,具有足够的计算能力和IO口数量,用于控制小车的各种功能。
2. 电机驱动模块:使用电机驱动模块控制小车的电机,实现小车的前进、后退、转向等动作。
3. 巡线传感器模块:使用巡线传感器模块实时检测线路的位置,并将检测结果传输给STM32单片机。
4. 电源模块:使用适配器或者电池等电源模块为小车提供稳定的电源。
软件设计智能巡线小车的软件设计主要包括以下几个方面:1. 接口程序设计:编写STM32单片机的接口程序,用于与巡线传感器模块和电机驱动模块进行通信,实现数据的读取和控制信号的发送。
2. 算法设计:设计线路检测算法,通过巡线传感器模块检测到的数据进行分析和处理,确定小车应该采取的动作,如前进、后退、转向等。
3. 控制程序设计:编写控制程序,根据算法的结果控制电机驱动模块,实现小车的自主导航功能。
4. 用户界面设计:设计一个基本的用户界面,用于显示小车的状态信息和操作界面。
实施步骤基于STM32单片机的智能巡线小车的实施步骤如下:1. 进行硬件搭建:按照设计要求,将STM32单片机、电机驱动模块、巡线传感器模块和电源模块等连接起来,并进行必要的电路连接和固定。
2. 开发接口程序:编写STM32单片机的接口程序,实现与巡线传感器模块和电机驱动模块的通信。
3. 设计算法和控制程序:根据巡线传感器模块的输出数据,设计线路检测算法,确定小车的动作,编写相应的控制程序。
4. 实现用户界面:开发一个简单的用户界面,显示小车的状态信息和操作界面。
5. 调试和测试:对小车进行调试和测试,确保线路检测和控制功能的正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
互联网浪潮下安防行业高速发展,安防作为工厂安全的第一道屏障,是整个工厂安全守护者,十分重要。
当前巡检机器人在整个安防行业展开,巡检机器人的建设也正在从“传统”向“技防”转型,为工厂提供安全与便利,从而推动和谐社会建设。
本文介绍了巡检机器人的设计。
1 巡检机器人整体系统设计
巡检机器人主要运用于工厂车间、写字楼、教学楼、仓库等需要安全管理的场所,它由运动底盘、摄像头、单片机、激光雷达、超声波、红外、无线传输模块、各种环境传感器等构成,采用室内定位技术、FPV 视频实时传输技术、计算机视觉技术、物联网技术等,实现了自动巡航、自动报警、远程监控等功能。
它可以帮助人们自动巡检办公楼或其他需要安全管理的场所,按照程序设定,对指定工作区域进行定时巡检。
基于STM32
的智能巡检机器人的设计
苏州市职业大学 韦婷婷 朱泓金 蔡 瑞 周 鑫
周星禹
项目基金:
1、2017年江苏省高等职业教育高水平骨干专业建设项目[苏教高(2017)17号]:应用电子技术。
2、2018年江苏省大学生创新创业训练计划项目(项目编号:201811054012Y ):智能巡检机器人的设计与实现。
3、2018年苏州市职业大学研究性课程(项目编号:SZDYKC-180710):基于STM32
智能小车的设计与实现。
图1 系统结构框图
2 环境测量系统方案设计
环境测量系统主要以工厂环境检测为主要目的,我们利用传感器以及一些外设装置帮助巡检机器人实时对工厂环境进行实进行数据检测并采集,然后将收到的信息实时传送给处理器,让巡检机器人通过完成处理器下达的命令对工厂内部的温度,湿度,可燃气体和有毒气体进行检测,再实时将工厂内部环境反馈给用户端。
系统以STM32F103系列单片机为主,外设MQ-2烟雾气敏
传感器模块(潘光良,李军,家庭巡视机器人环境感知系统设计,齐鲁工业大学学报,2018年第5期55-58页,DOI:10.16442/ki.qlgydxxb.2018.05.011.)、DS18B20温度传感器和HC-SR04超声波测距传感器等模块。
巡检机器人将巡检中得到的数据显示在LED 屏上,如果在巡检过程中检测到某项值超出系统安全值就会报警。
3 MCU模块设计
MCU 模块采用的意法半导体的STM32F103ZET6。
该芯片内核采用Cortex M3内核,主频最高可达72MHz ,有丰富的外部接口,多个基本和高级定时器(STMicroelectronics.STM32F103x8 and STM32F103xB datasheet [EB/OL].https:///resource/en/datasheet/cd00161566.pdf.)。
MCU 模块主要用于控制WiFi
通
图2 激光定位原理图
(下转第197页)
在机械臂安装过程中要注意有的地方是要进行摆动的部分,因此不能把螺丝拧的太紧。
还有机械手的部分要确保构成机械爪的两个部件后半部分的啮齿要准确的啮合在一起,否则机械手夹不住东西或者无法带动机械手进行张合。
机械臂安装完成图如图2。
图2
图3 Arduino驱动板电路图
蓝牙控制模块安装:运用蓝牙控制模块实现了物体搬运过程中的获取,移动和摆放等动作,即模仿人的搬运动作。
它是智能搬运中的核心部分。
蓝牙控制模块的工作方式:首先在手机安装蓝牙APP 程序,其按键功能如下:
前进:按下发出 ONA 松开ONF
后退:按下发出 ONB 松开ONF
左转:按下发出 ONC 松开ONF
右转:按下发出 OND 松开ONF
停止:按下发出 ONE 松开ONF
数字1:按下发出 ON1 松开 ONa
数字2:按下发出 ON2 松开 ONb
数字3:按下发出 ON3 松开 ONc
数字4:按下发出 ON4 松开 ONd
数字5:按下发出 ON5 松开 ONe
数字6:按下发出 ON6 松开 ONf
数字7:按下发出 ON7 松开 ONg
数字8:按下发出 ON8 松开ONh
数字9:按下发出 ON9 松开ONi
手机APP要与蓝牙模块设备配对。
通过手机APP发送命令给蓝牙模块。
蓝牙模块再将命令传给Arduino控制板。
Arduino控制板识别到蓝牙模块发送到串口字符串命令后,执行蓝牙程序对应的按键程序。
实验总结:本项目主要完成了机械手臂的拟人化设计,对于抓举式机械手臂进行了更加人性化和智能化的改进,能在远程蓝牙控制下实现对货物的抓取和搬运功能,并且在蓝牙控制下可以将货物从一个储物间搬运到另一个储物间,机械手爪部分运用舵机加啮合齿轮带动的方式进行对物体的抓取。
在利用手机程序连接蓝牙后对小车和机械手臂进行程序运行和控制机构的测试。
小车在控制下运行状况良好,可以实现前进、后退、左转、右转和后退功能。
机械手臂可以实现手爪张开、闭合,机械臂的上臂可以上下摆动,机械臂的下臂实现上下摆动,机械臂底座可以实现左右180°旋转。
程序运行和小车移动还有机械臂的动作非常稳定,实现了系统设计本身的目的,即对于搬运机器人或搬运机器实现了智能化的工作方式。
本项目完成了蓝牙控制下的仓储搬运。
今后还要在智能化自主搬运方面做进一步的研究。
如:自主按照物体大小摆放物体,自主规划搬运路线等等。
总之,在智能搬运方面还有很多需要进一步探究的东西。
(上接第195页)
信,控制传感器组和小车地盘的电机。
4 核心技术介绍
室内定位技术:我们独立开发了一套室内定位技术,它是通过激光雷达与wifi信号强度进行室内定位,经过测试,我们的室内定位精度可达到3-10厘米,并且可对巡航历路线进行历史纪录(图2)。
FPV实时视频传输技术:把巡检机器人的第一视角传到管理人员的设备上,管理人员可实时看到巡检机器人看到的状态,从而判断周围环境的安全情况。
物联网开关技术:先将需要安全巡检的地方装上一些物联网开关的设备,比如日照灯、总电源、水阀等,这样就可以让巡检机器人去控制它们,在机器人巡检时,如果遇到没有关闭的电源,它可以通过这项技术把电源给切断,避免安全隐患,而且能够节约能源。
图3 物联网通讯原理图
作者简介:韦婷婷(1999—),女,河南人,苏州市职业大学电子学院在读学生,曾获苏州中美创客三等奖,江苏省第九届大学生机器人阵地攻防项目冠军。