课程设计---锅炉给水控制系统设计与仿真
锅炉汽包水位控制系统(过程控制仪表课程设计)
过程控制仪表课程设计题目锅炉汽包水位控制系统指导教师高飞燕班级自动化071学号***********学生姓名丁滔滔2011年1月5号附录:仪表配接图 (20)锅炉汽包水位控制系统1.系统简介:控制系统一般由以下几部分组成图1 自动控制系统简易图锅炉水位系统如下图:图2 单冲量控制系统原理图及方框图其单位阶跃响应图如下:图3 蒸汽流量干扰下水位阶跃曲线通过电容式液位计将检测来的液位信号变送给成标准信号,再输送给控制器,调节器再通过执行机构和阀来控制进水量,从而达到自动控制锅炉水位。
2.锅炉控制系统:2.1锅炉:锅炉是火力发电厂中主要设备之一。
它的作用是使燃料在炉膛中燃烧放热,井将热量传给工质,以产生一定压力和温度的蒸汽,供汽轮发电机组发电。
电厂锅炉与其他行业所用锅炉相比,具有容量大、参数高、结构复杂、自动化程度高等特点。
2.2过热器和再热器:蒸汽过热器是锅炉的重要组成部分,它的作用是将饱和蒸汽加热成为具有一定温度的过热蒸汽,并要求在锅炉负荷或其他工况变动时,保证过热气温的波动处在允许范围内。
提高蒸汽初压和初温可提高电厂循环热效率,但蒸汽初温的进一步提高受到金属材料耐热性能的限制。
蒸汽初压的提高随可提高循环热效率,但过热蒸汽压力的进一步提高受到汽轮机排气湿度的限制,因此为了提高循环热效率及降低排气湿度,可采用再热器。
通常,再热蒸汽压力为过热蒸汽压力的20%左右,再热蒸汽温度与过热蒸汽温度相近。
过热器和再热器内流动的为高温蒸汽,其传热性能差,而且过热器和再热器又位于高烟温区,所以管壁温度较高。
如何使过热器和再热器管能长期安全工作是过热器和再热器设计和运行中的重要问题。
在过热器和再热器的设计及运行中,应注意下列问题:⑴运行中应保持汽温的稳定,汽温波动不应超过±(5~10)℃。
⑵过热器和再热器要有可靠的调温手段,使运行工况在一定范围内变化时能维持额定的汽温。
⑶尽量防止和减少平行管子之间的偏差。
2.3省煤器和空气预热器:省煤器和空气预热器通常布置在锅炉对流烟道的尾部,进入这些受热面的烟气温度已较低,因此常把这两个受热面称为尾部受热面或低温受热面。
基于MATLAB的锅炉液位控制系统的设计与仿真

摘要近年来,在工业控制中,随着工业技术的不断改进和发展,锅炉液位的过程控制系统得到了广泛的应用,为了确保锅炉的控制系统的正常运行,控制系统中要求锅炉的液位往往需要维持在某一个设定值上或者只允许在某一个小范围内进行变化。
在工业生产中,为保证工业生产的安全进行,控制过程中需要确保锅炉中的液体不会产生溢出,人们对锅炉的控制系统的各项参数的要求愈来愈高。
而在实际的工业生产中,被控对象常常具有时延、非线性等特点,采用一般的控制方法将很难得到很好的控制效果。
所以,对时延、非线性对象的先进控制方法进行研究,优化工业生产系统的控制水平,具有很重要的意义。
锅炉液位的控制大多应用PID控制方法。
PID参数整定通常是在得到控制对象的数学模型后,根据相关的整定规则,进行在线调节。
本毕业设计中所提到的双容水箱液位控制系统是在国内外相关实验装置的基础上,通过考虑其性能指标,自行设计的模拟多种对象特性的实验设备。
双容水箱的结构虽然简单但在高水平、复杂的控制系统中,此类系统仍是大多数,是最基本的过程空竹系统。
复杂过程控制系统往往是建立在简单控制系统的基础上。
本设计应用所学的过程控制知识,采用MATLAB对锅炉水位控制系统进行仿真。
关键词:锅炉液位,MATLAB,PID控制,双容水箱AbstractIn recent years, in industrial control, with the constant improvement and d evelopment of industrial technology, the process of the boiler liquid level contr ol system has been widely used, in order to ensure the normal running of the boiler control system, control system of boiler liquid level, often need to maint ain on a certain value or is only allowed to change in a small scope.In industrial production, to ensure the safety of industrial production, the need to ensure that the boiler in the process of control the liquid does not produce overflow, the various parameters of the control system of boiler is hi gher and higher requirements.In the actual industrial production, the controlled often has the characteristics of time delay, nonlinear, using the general control method will be difficult to get good control effect.So for advanced control met hods of time delay, nonlinear object for research, optimizing the control level of industrial production system, has the very vital significance.Most of the boiler liquid level control using PID control method.PID parameters setting is usually after the mathematical model of controlled object, according to the related setting rules, which can adjust the online.As referred to in this graduation design is double let water tank liqui d level control system at home and abroad, on the basis of related experiment al apparatus, by considering the performance index, design simulation of a vari ety of experimental equipment of object properties.Double let water tank struct ure is simple but in high level, the control of complex systems, such a system is still the most, is the basic process of diabolo plex process contr ol system is often established on the basis of simple control system.Knowledge of process control, we have learned this design application of the boiler water level control system by MATLAB simulation.KEY WORDS: boiler liquid level, MATLAB, PID control, double let water ta nk第1章绪论1.1 设计背景工业生产生活中,锅炉是通用的热力设备,同时也是能源,电厂,化工等重工业生产运行中最为重要的动力设备。
锅炉汽包液位智能控制系统设计与仿真研究__毕业设计论文 精品
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:锅炉汽包液位智能控制系统设计与仿真研究学生姓名:强佳学号:200440503124专业:测控技术与仪器班级:测控2004-1班指导教师:李忠虎副教授锅炉汽包液位智能控制系统设计与仿真研究摘要锅炉是化工、发电、炼油、造纸和制糖等工业生产过程中必不可少的重要动力设备。
因此,对锅炉设备的自动控制系统进行分析研究就显得尤为重要。
锅炉汽包液位控制是锅炉生产过程中最重要的环节。
锅炉的大部分事故是由汽包液位控制不当而引起的,由于受到蒸汽负荷干扰而产生虚假液位,使控制器反向动作,进而引发汽包液位的大幅振动。
本文针对锅炉汽包液位的动态特性,研究FUZZY-PID控制在锅炉汽包液位控制中的应用。
传统的锅炉汽包液位三冲量控制系统大都采用PID控制。
而模糊控制不要求知道被控对象的精确数学模型,只需要操作人员的经验知识及操作数据,鲁棒性强,适合用于非线性、滞后系统的控制,但其静态性能不能令人满意,限制了它的应用。
为消除模糊控制的稳态误差,本文将FUZZY-PID引入锅炉汽包液位的三冲量控制中,并利用Simulink分别在设定值及干扰作用下对控制系统进行仿真,结果表明,较之单纯的模糊控制和常规PID控制,这种控制效果较为理想,可满足锅炉的汽包液位控制要求。
关键词:汽包液位;PID控制;糊控控制;FUZZY-PID控制;仿真The design and imitate resesrch of intellectual control system ofboiler drum water levelAbstractThe boiler is absolutely necessary significant power plant of industry productions process such as the chemical industry,heatedible oil,generation of electrical energy,papermaking and refines sugar and so on.So,it is especially important to analyze and research the automatic control in the boiler installation.Segment that the boiler drum water level control is the most significant in the process of boiler production.The most accidents of boiler were caused by the unfit control of drum water level,which was due to the interference of steam to the drum,causing the false water level,making the reaction of controller,then arousing the large margin vibration of the drum water level.According to the feather of the drum water level,we research the using of the fuzzy-pid compound control in the boiler drum water level control system.The traditional control mode of three-variable in the drum water level mostly uses PID.The fuzzy control does not need precise mathematical model of the controlled object,it only needs the experience of operator and the data of operating,it has good robustness and is fit to control the system with nonlinearity and time lag,but its static characteristic is dissatisfied,which limits its application.It is usual mode of three-variable drum water level in order to eliminate the static error that using fuzzy-PID control,and the simulation with the action of setting value and noise.The result of simulation indicates that the effect of control improves comparing with simple fuzzy control and traditional PID control,which can satisfy the control requirement of the drum water level.Key words:drum water level;PID control;fuzzy control;fuzzy-PID control;simulation目录锅炉汽包液位智能控制系统设计与仿真研究 (I)摘要 (I)Abstract (II)第一章引言 (1)1.1 课题背景与意义 (1)1.2 锅炉控制的研究现状 (3)1.3 本文的主要研究内容 (5)第二章控制理论分析 (6)2.1 PID控制理论 (6)2.2 模糊控制理论 (8)2.2.1 模糊控制理论的起源与发展 (8)2.2.2 模糊控制的基本思想 (9)2.2.3 模糊控制系统的组成 (11)2.2.4 模糊控制器的设计 (12)2.2.5 模糊论域、量化因子和比例因子的选择 (15)2.2.6 模糊控制的主要优点 (17)2.2.7 模糊控制存在的问题 (17)2.3 模糊-PID控制 (17)2.3.1 模糊自适应PID原理简介 (17)2.3.2 多模态模糊-PID控制原理 (18)2.3.3 多模态模糊-PID控制系统实现 (18)第三章锅炉汽包液位系统特性与控制方法分析 (19)3.1 汽包液位的动态特性 (19)3.1.1 汽包液位在给水流量作用下的动态特性 (19)3.1.2 汽包液位在蒸汽流量作用下的动态特性 (21)3.2 锅炉汽包液位控制 (22)3.2.1 单冲量控制系统 (23)3.2.2 双冲量控制系统 (24)3.2.3 三冲量控制系统 (25)第四章锅炉汽包液位PID控制系统设计及仿真研究 (27)4.1 汽包液位的PID控制系统设计 (27)4.1.1 汽包液位的PID控制系统的建立 (27)4.1.2 PID参数的整定 (27)4.2 仿真研究 (29)4.2.1 关于MATLAB (29)4.2.2 关于SIMULINK (30)4.2.3 仿真研究 (30)第五章多模态模糊-PID控制系统设计及仿真研究 (32)5.1 模糊控制系统的设计及仿真研究 (32)5.1.1 模糊控制器的设计 (32)5.1.2 模糊控制系统的设计 (37)5.1.3 仿真研究 (38)5.1.4 多模态模糊-PID控制系统的设计 (43)5.1.5 仿真研究 (44)5.2 几种控制效果比较分析 (45)第六章结束语 (46)参考文献 (48)致谢 (50)引言课题背景与意义锅炉是工业生产部门重要的动力设备,它产生的高压蒸汽可作为动力源,也可作为精馏、干燥、反应、加热等过程的热源。
【精品】锅炉内胆水温控制系统设计课程设计

湖南工程学院课程设计课程名称过程控制课题名称锅炉内胆水温控制系统设计专业自动化班级1003班学号2姓名邓涛指导教师沈细群2013 年 9 月13日湖南工程学院课程设计任务书课程名称过程控制课题锅炉内胆水温控制系统设计专业班级自动化1003班学生姓名邓涛学号2指导老师沈细群审批沈细群任务书下达日期2013年9月2日任务完成日期2013年9月13日目录第1章系统总体方案设计与选择错误!未指定书签。
第2章系统工作原理与框图.. 错误!未指定书签。
2.1工作原理................. 错误!未指定书签。
2.2系统结构框图............. 错误!未指定书签。
第3章控制系统工作流程.... 错误!未指定书签。
第4章系统调试............ 错误!未指定书签。
第5章系统监控............ 错误!未指定书签。
附录...................... 错误!未指定书签。
参考文献 ............... 错误!未指定书签。
程序清单 ............... 错误!未指定书签。
评分表错误!未指定书签。
第1章系统总体方案设计与选择过程控制就是操纵变量影响工艺条件、过程、状况,目的是为了达到所需的目标。
在石油生产加工、化学、热力、材料以及轻工业等行业领域中,我们把以温度、液位、流量、压力等等这些被作为主要的控制对象的系统都称作是“过程控制”。
过程控制除了在传统产业改造的过程控制方面有很重要的作用以外,在提高产品质量、节约原材料及能源、保护生态环境、减少环境污染方面以及提高经济效益和劳动效率方面的影响也非常大。
现在过程控制已经在我国新建的大规模、结构复杂的工农业生产过程中占据非常重要的地位。
随着工业技术的更新,特别是半导体技术、微电子技术、计算机技术和网络技术的发展,自动化仪表已经进入了计算机控制装置时代。
在石油、化工、制药、热工、材料和轻工等行业领域中,以温度、流量、物位、压力和成分为主要被控变量的控制系统都称为“过程控制”系统。
发电厂锅炉给水控制系统
摘要随着科技的发展,人们越来越离不开电。
大型火力发电厂地位显得尤其重要。
其机组由锅炉、汽轮机发电机组和辅助设备组成的庞大的设备群。
工艺流程复杂,设备众多,管道纵横交错,有上千个参数需要监视、操作和控制,这就需要有先进的自动化设备和控制系统使之正常运行,并且电能生产要求高度的安全可靠和经济性,尤其是大型骨干机组。
大型发电单元机组是一个以锅炉,高压和中、低压汽轮机和发电机为主体的整体。
锅炉作为电厂中的一个重要设备,起着重要的作用,根据生产流程又可以分为燃烧系统和汽水系统。
其中,汽包锅炉给水及水位的调节已经完全采用自动的方式加以控制。
本次课程设计主要研究发电厂给水控制系统,即锅炉汽包水位控制。
其要求是提供合格的蒸汽,使锅炉发汽量适应符合的需要。
为此,生产过程的各个主要工艺参数必须加以严格控制。
锅炉设备是一个复杂的控制对象,主要输入变量是负荷、锅炉给水、燃料量、减温水、送风和引风等。
主要输出变量是汽包水位、蒸汽压力、过热蒸汽温度、炉膛负压、过剩空气等。
发电厂锅炉给水控制系统1.概述大型火力发电机组由锅炉、汽轮机发电机组和辅助设备组成的庞大的设备群。
工艺流程复杂,设备众多,管道纵横交错,有上千个参数需要监视、操作和控制,这就需要有先进的自动化设备和控制系统使之正常运行,并且电能生产要求高度的安全可靠和经济性,尤其是大型骨干机组。
大型发电单元机组是一个以锅炉,高压和中、低压汽轮机和发电机为主体的整体。
锅炉作为电厂中的一个重要设备,起着重要的作用,根据生产流程又可以分为燃烧系统和汽水系统。
其中,汽包锅炉给水及水位的调节已经完全采用自动的方式加以控制。
本次课程设计主要研究发电厂给水控制系统,即锅炉汽包水位控制。
锅炉汽包水位是一种非线性、时变大、强耦合的多变量系统。
在锅炉运行中,水位是一个很重要的参数。
若水位过高,则会影响汽水分离的效果,使用气设备发生故障;而水位过低,则会破坏汽水循环,严重时导致锅炉爆炸。
同时高性能的锅炉产生的蒸汽流量很大,而汽包的体积相对来说较小,所以锅炉水位控制显得非常重要。
锅炉自动给水课程设计

锅炉自动给水课程设计一、课程目标知识目标:1. 学生能够理解锅炉自动给水系统的工作原理,掌握相关理论知识;2. 学生能够描述锅炉自动给水系统中各部件的功能及相互关系;3. 学生能够解释锅炉自动给水系统在热能工程中的应用及重要性。
技能目标:1. 学生能够运用所学知识分析锅炉自动给水系统的故障及原因;2. 学生能够设计简单的锅炉自动给水系统方案,并进行初步的调试与优化;3. 学生能够运用相关工具和设备对锅炉自动给水系统进行操作和维护。
情感态度价值观目标:1. 学生培养对热能工程领域的兴趣,认识到锅炉自动给水技术在其中的作用;2. 学生树立安全意识,关注锅炉自动给水系统运行中的安全隐患;3. 学生养成合作、探究的学习习惯,培养解决问题的能力和创新精神。
课程性质:本课程为热能工程专业课程,旨在帮助学生掌握锅炉自动给水系统的基本理论、设计方法和操作技能。
学生特点:学生具备一定的热能工程基础知识,具有较强的学习能力和实践能力。
教学要求:结合理论教学与实践操作,注重培养学生的动手能力和实际问题解决能力,提高学生的综合素质。
通过本课程的学习,使学生能够达到上述课程目标,为将来的工作和发展奠定基础。
二、教学内容1. 锅炉自动给水系统原理:介绍锅炉自动给水系统的基本构成、工作原理及其在热能工程中的应用。
- 教材章节:第二章 锅炉自动给水系统- 内容:自动给水泵、给水调节阀、水位控制器等部件的功能及协作原理。
2. 锅炉自动给水系统部件及选型:分析各部件的类型、性能及选型方法。
- 教材章节:第三章 锅炉自动给水系统部件及选型- 内容:给水泵、调节阀、控制器等设备的技术参数及选型原则。
3. 锅炉自动给水系统设计与调试:讲解系统设计原则、步骤及调试方法。
- 教材章节:第四章 锅炉自动给水系统设计与调试- 内容:系统设计要求、方案制定、调试流程及优化措施。
4. 锅炉自动给水系统操作与维护:介绍系统运行操作要领、常见故障处理及日常维护方法。
《锅炉给水控制系统》课件

07
结论
本课程的主要内容总结
锅炉给水控制系统的重要性和作用
介绍了锅炉给水控制系统的基本概念、原理和功能,以及其在工业生 产中的重要性和作用。
给水控制系统的组成和原理
详细介绍了给水控制系统的组成,包括传感器、控制器、执行器等, 以及各部分的工作原理和相互之间的联系。
控制策略和控制算法
讲解了常用的控制策略,如PID控制、模糊控制等,以及控制算法的 设计和实现。
实际应用案例分析
通过实际案例的分析,介绍了给水控制系统在工业生产中的应用和效 果。
对未来学习和实践的建议
深入学习控制理论
建议学习者深入学习控制理论,了解各种控 制算法的原理和应用场景。
实践操作和实验
建议学习者多进行实践操作和实验,通过实 际操作加深对给水控制系统的理解。
关注新技术发展
建议学习者关注新技术的发展,了解最新的 控制技术和应用趋势。
随着自动化技术的发展,出现了各种 形式的自动控制系统,如PID控制器 、模糊控制、神经网络控制等。
03
锅炉给水控制系统的组成与工作 原理
组成部件
传感器
用于检测锅炉给水流量、压力、温度等参数 ,并将检测信号传输至控制器。
执行器
接收控制指令,调节给水阀门开度,控制给 水流量。
控制器
根据传感器传输的信号,通过运算处理,输 出控制指令。
控制策略
在此添加您的文本17字
PID控制策略
在此添加您的文本16字
PID控制是一种经典的控制策略,通过比例、积分和微分 三个环节来调整控制信号,以减小系统的误差。
在此添加您的文本16字
PID控制策略简单易行,但对参数调整要求较高,否则可 能导致系统性能不佳。
过程控制课程设计(论文)-锅炉给水控制系统设计

内蒙古科技大学过程控制课程设计论文题目:锅炉给水控制系统设计学生姓名:学号:专业:测控技术与仪器班级:2008-1指导教师:2011年9月6日前言 (2)第一章锅炉的工艺流程 (3)锅炉的组成 (3)锅炉的工作过程 (3)1.3 锅炉的分类 (4)第二章锅炉控制系统的整体设计思路 (5)2.1 汽包水位的控制 (5)2.2 蒸汽温度的控制 (5)2.3 锅炉燃烧的控制 (5)第三章锅炉给水控制系统设计 (6)3.1 锅炉水位动态特性 (6)3.2 单冲量控制系统 (6)双冲量控制系统 (7)3.4 三冲量控制系统 (9)3.4.1 锅炉给水控制系统 (10)前馈控制系统 (11)第四章设计心得 (14)参考文献 (15)电力是以电能作为动力的能源。
发明于19世纪70 年代,电力的发明和应用掀起了第二次工业化高潮。
成为人类历史18世纪以来,世界发生的三次科技革命之一,从此科技改变了人们的生活。
20世纪出现的大规模电力系统是人类工程科学史上最重要的成就之一,是由发电、输电、变电、配电和用电等环节组成的电力生产与消费系统。
它将自然界的一次能源通过发电动力装置转化成电力,再经输电、变电和配电将电力供应到各用户。
火力发电是利用燃烧燃料(煤、石油及其制品、天然气等)所得到的热能发电。
火力发电的发电机组有两种主要形式:利用锅炉产生高温高压蒸汽冲动汽轮机旋转带动发电机发电,称为汽轮发电机组;燃料进入燃气轮机将热能直接转换为机械能驱动发电机发电,称为燃气轮机发电机组。
火力发电厂通常是指以汽轮发电机组为主的发电厂。
锅炉是石油化工、发电等工业过程中必不可少的重要动力设备。
它所产生的高压蒸汽既可作为驱动透平的动力源,又可作为精馏、干燥、反应、加热等过程的热源。
随着工业生产规模的不断扩大,作为动力和热源的锅炉也向着大容量、高参数、高效率方向发展。
第一章锅炉的工艺流程锅炉设备包括锅炉本体设备和锅炉辅助设备。
锅炉本体设备主要由燃烧设备、蒸发设备、对流受热面、锅炉墙体构成的烟道和钢架构建等组成。
锅炉循环水控制系统设计——自控工程课程设计 精品

东北石油大学课程设计课程自控工程课程设计题目锅炉循环水控制系统设计院系电气信息工程学院专业班级自动化级班学生姓名学生学号指导教师年月日东北石油大学课程设计任务书课程自控工程课程设计题目锅炉循环水控制系统设计专业自动化姓名学号主要内容、基本要求、主要参考资料等主要内容:1.掌握利用Auto-CAD绘制锅炉循环水控制工艺流程图2.掌握节流装置的计算方法和计算机辅助设计计算3.掌握调节阀的选型及口径计算基本要求:1.在工程设计中,必须严格贯彻执行一系列国家技术标准和规定2.边学习标准和规定边上机设计3.必须按阶段完成任务4.设计完成后交出一份包括上述三个部分符合撰写规范的设计报告主要参考资料:[1]GB/T2624-1993,流量测量节流装置[S].[2]奚文群,翁维勤.调节阀口径计算指南[M].兰州:化工部自控设计技术中心站,1991.[3]王骥程,祝和云.化工过程控制工程[M].北京:化学工业出版社,2003.完成期限指导教师专业负责人年月日1、工艺流程图2、标准节流装置设计计算原始数据位号:FRQ102工作介质:循环水取压方式:法兰取压孔板操作温度:150℃工况密度:926.012Kg/m3 工作压力:0.7MPa 工况粘度:199×10-6 Pa.S 管道内径:80mm 最大流量:30000 kg/h 管道材质:20#钢节流件材质:1CR18NI9TI3、调节阀计算原始数据位号:PIRAC工作介质:循环水单座阀:操作温度:140℃工况密度:926.012Kg/m3 阀前压力:0.7MPa 工况粘度:199×10-6 Pa.S 阀后压力:0.6MPa 最大流量:30000 kg/h 管道内径:80mm 饱和蒸汽压力P=0.016MPa目录第1章锅炉循环水控制系统工程实例 (1)1.1 锅炉循环水控制系统工程背景及说明 (1)1.2 CAD流程图 (3)第2章控制系统方案设计 (4)2.1 工艺及装置介绍 (4)2.2 锅炉控制系统控制任务 (5)2.3 控制系统方案设计 (5)第3章控制系统仪表选型 (9)3.1 检测元件选型 (9)3.2 执行元件 (10)第4章课程设计心得 (19)参考文献 (20)附录 (21)第1章锅炉循环水控制系统工程实例1.1 锅炉循环水控制系统工程背景及说明人类日常生活离不开水,工业生产也同样离不开水。
锅炉控制系统设计仿真毕业论文
锅炉控制系统设计仿真摘要工业锅炉作为我国工业生产和集中供热的重要能源转换设备,能耗巨大,长期处在高能耗、高污染的生产状态。
然而,目前我国大多数锅炉控制系统自动化不高、安全性低,效率普遍低于国家标准。
锅炉作为将一次能源转化为二次能源的重要设备之一,提高锅炉控制水平已势在必行。
本文针对锅炉系统参数时变、严重非线性、干扰因素复杂等特点,提出对汽包水位采用三冲量控制方式,对炉膛负压采用前馈PID控制,对最优风煤比采用双交叉限幅比值控制的控制策略。
在MATLAB环境下对几种控制系统进行了仿真。
仿真结果显示,三冲量控制、前馈PID和双交叉限幅比值控制具有良好的控制效果,减小了超调量,提高了上升时间,缩短了调节时间,与传统的PID控制器相比,更适合工业锅炉这种复杂的控制对象。
关键词:锅炉三冲量控制前馈PID控制双交叉限幅比值控制IAbstractAs central heating in industrial production and the important energy conversion equipment in China, industrial boiler consumes enormous energy,and stays at high energy consumption and pollution production status. However, at present the majority of automatic boiler control system is not high, the security is low and the efficiency is generally lower than the national standard. Because the boiler is one of the important equipment which converses primary energy into secondary energy, improving the level of boiler control is imperative.In view of many factors of the boiler system, such as time-varying parameters, severely nonlinear and complex interference factors and so on , this paper puts forward three control strategies, including using three-impulse control, utilizing feed forward PID control to hearth negative pressure, and adopting double crossover restricts the amplitude ratio control to the optimal air fuel ratio. Several control systems are simulated in the MATLAB environment. The simulation results shows that three-impulse control, feed forward PID control and double crossover restricts the amplitude ratio control have good control effect, which reduce the overshoot, improve the rise time and reduce adjustment time. Compared with the traditional PID controller, these control systems are more suitable for the industrial boiler, a kind of complex control object.Key words: The Boiler, Three-impulse Control,Feed forward PID Control, Double Cross Restricts the Amplitude Ratio ControlIIIII目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 选题背景及意义 (1)1.2 国内外锅炉的运行水平 (1)1.3 制约我国锅炉发展的因数 (2)1.3.1 大多数锅炉制造厂技术力量仍然薄弱 (2)1.3.2 燃料的因素 (2)1.3.3 工业锅炉的标准体系 (2)1.3.4 市场机制的影响及科研开发投入的不足 (2)1.3本文研究的主要内容 (2)第2章锅炉系统的控制任务 (3)2.1 锅炉系统的工艺流程简介 (3)2.2 锅炉自动控制系统的任务 (4)2.3 PID控制规律介绍 (4)本章小结 (5)第3章汽包水位三冲量控制 (6)3.1 汽包水位系统介绍 (6)3.2 汽包水位的动态特性分析 (6)3.3 锅炉汽包水位的控制方案 (8)3.3.1 单冲量控制系统 (9)3.3.2 双冲量控制系统 (9)3.3.3 三冲量控制系统 (10)本章小结 (10)第4章炉膛负压控制 (11)4.1 控制和监视炉膛负压的意义 (11)4.2 炉膛负压控制 (11)本章小结 (12)第5章最优风煤比控制 (13)5.1 常规PID风煤比控制系统的缺陷 (13)5.2 双闭环交叉限幅比例控制 (13)5.3 温度串级控制 (14)5.4 控制过程分析 (15)本章小结 (16)第6章 MATLAB/Simulink仿真 (17)6.1 MATLAB软件介绍 (17)6.2 汽包水位控制MATLAB仿真 (17)6.3 炉膛负压控制仿真 (18)6.4 最优风煤比控制仿真 (19)本章小结 (20)结论 (22)参考文献 (23)致谢 (24)II第1章绪论1.1选题背景及意义锅炉作为能源转换的重要设备,运行情况的好坏直接关系到能源的利用率高低。
过程参数课程设计锅炉给水

过程参数课程设计锅炉给水一、课程目标知识目标:1. 让学生掌握锅炉给水的基本概念,理解给水在锅炉运行过程中的作用和重要性。
2. 使学生了解锅炉给水的质量要求,掌握影响给水质量的各种因素。
3. 帮助学生掌握锅炉给水处理方法,了解不同处理方法的优缺点及其适用场合。
技能目标:1. 培养学生运用理论知识分析和解决实际工程问题的能力,例如针对锅炉给水质量问题提出合理的解决方案。
2. 提高学生进行实验操作、数据分析和处理的能力,能够对锅炉给水进行基本的检测和评价。
情感态度价值观目标:1. 培养学生热爱专业,对锅炉运行过程中涉及的技术问题产生兴趣,提高学生的专业认同感。
2. 培养学生严谨的科学态度和良好的团队合作精神,使学生认识到在工程实践中,严格遵循操作规程和协作沟通的重要性。
分析课程性质、学生特点和教学要求:本课程为过程装备与控制工程专业的一门核心课程,旨在帮助学生掌握锅炉给水方面的基本理论和技术。
针对高年级学生已具备一定专业基础知识的特点,课程将注重理论与实践相结合,强化学生的实际操作能力。
在教学过程中,注重启发式教学,引导学生主动思考、积极探索,提高学生分析和解决问题的能力。
通过本课程的学习,使学生能够为锅炉的安全、经济运行提供技术支持,为将来的工程实践打下坚实基础。
二、教学内容1. 锅炉给水的基本概念- 锅炉给水的定义与作用- 锅炉给水的重要性及其对锅炉运行的影响2. 锅炉给水质量要求及影响因素- 给水质量标准及指标- 影响给水质量的因素分析- 锅炉给水水质异常的危害及防治措施3. 锅炉给水处理技术- 常用给水处理方法及其原理- 各类水处理设备的结构、工作原理及应用场合- 给水处理工艺流程及其优化4. 锅炉给水检测与评价- 锅炉给水检测方法与技术- 检测数据分析与处理- 锅炉给水质量评价方法5. 实践教学环节- 锅炉给水处理实验操作- 数据采集、处理与分析- 实际工程案例分析与讨论教学内容安排与进度:第1-2周:锅炉给水的基本概念及质量要求第3-4周:影响给水质量的因素及防治措施第5-6周:锅炉给水处理技术及其设备第7-8周:锅炉给水检测与评价方法第9-10周:实践教学环节(实验、案例分析等)教学内容与教材关联性:本教学内容与教材《过程装备与控制工程》中关于锅炉给水章节的内容相符合,涵盖了锅炉给水的理论基础、实际应用和实验操作等方面,确保了教学内容的科学性和系统性。
锅炉微机控制器的设计、仿真与制作

• 8. 3. 2设计
• 1.单片机选型 • 2.电源、时钟电路和复位电路
下一页 返回
8. 3 工作过程
• 3.系统硬件电路设计 • 系统硬件电路图如图8一13所示。 • 4.软件程序设计 • 该项目的程序流程图如图8-14所示。 • A/D转换(8位串行TLC0831)子程序框图见图8一15所示。 • 自动调节子程序框图见图8一16所示。 • 出水温度调节子程序框图见图8一17所示。 • 5. WK系列锅炉微机控制器的系统仿真
方式,也可用查询方式。 • 按照图8一8中的片选线接法,ADC0809的8个模拟通道的地址为7
FF8 H~7 FFFH。
上一页 下一页 返回
8. 2 理论基础
• 8. 2. 3 D/A转换器
• 1. D/A转换器的主要技术指标 • (1)转换速度 • D/A转换器从输入二进制数到转换成模拟量电压输出的过程需经历一
下一页 返回
8. 2 理论基础
• (2)电气隔离 • 光电隔离是实现单片机与现场电气隔离的一种简单有效的方法。光电
隔离通常采用光祸(光电祸合器件)来实现。 • 光祸通常使用较为普通的红外发光二极管与光敏三极管器件,由二者
封装在一起组合而成,如图8 -2所示。 • 光藕的特性由发光二极管与光敏三极管的特性决定。在使用该类器件
上一页 下一页 返回
8. 2 理论基础
• ⑦不必进行零点和满度调整; • ⑧转换速度取决于芯片的时钟频率。时钟频率范围:10一1280kHz,
当时钟为500kHz时,转换速度为128us。 • ADC0809的引脚图如图8 -7所示。 • (2)80C51单片机与ADC0809接口 • 图8 -9为80051单片机与ADC0809的接口电路。该电路既可以用中断
锅炉汽包水位三冲量控制系统仿真课程设计

内蒙古科技大学本科生课程设计论文题目:锅炉汽包水位三冲量控制系统仿真学生姓名:xxxx学号:xxxx专业:xxxx班级:xxxx指导教师:李x时间:2013年12月8日目录第一章汽包水位控制的概述 (2)1.1 锅炉汽包水位的动态特性 (2)1.1.1 给水流量W对汽包水位H的影响 (2)1.1.2汽包水位在蒸汽流量D扰动下的影响 (3)第二章三冲量串级给水控制系统设计 (5)2.1 单冲量水位控制系统的介绍 (5)2.2 双冲量水位控制系统的介绍 (6)2.3 三冲量汽包水位控制原理 (6)2.3.1 三冲量控制方案之一 (6)2.3.2三冲量控制方案之二 (8)2.3.3三冲量控制方案之三 (9)第三章汽包三冲量控制算法的MATLAB仿真设计 (11)3.1 控制系统模型图的绘制 (11)3.1.1 Simulink模块的调用 (11)3.1.2 PID子系统的建立以及封装 (11)3.2 PID控制器的参数整定 (13)第四章总结 (16)参考文献 (17)第一章汽包水位控制的概述在锅炉控制工艺中,保持汽包水位在一定范围内是锅炉稳定运行的重要指标。
炉膛负压保持在一定范围内。
如果水位过低,则由于汽包内的水量较少,而负荷却很大,水的汽化速度又快,因而汽包内的水量变化速度很快,如不及时控制,就会使汽包内的水全部汽化,导致锅炉烧坏或爆炸;水位过高会影响汽包的汽水分离,产生蒸汽带水现象,会使过热器管壁结构导致破坏。
汽包水位控制的任务是使锅炉给水量始终跟着蒸发量,维持汽包水位在锅炉生产允许的范围内。
汽包及蒸发管储存着蒸汽和水,储存量的多少,是以被控制量水位表征的,通常情况下汽包的流入量是给水量,流出量是蒸汽量,当给水量等于蒸汽量时,汽包水位就恒定不变。
引起水位变化的主要扰动式蒸汽流量和给水量的变化。
当蒸汽流量突然增大,汽包压力将急剧下降,饱和水将快速蒸发,使得饱和水中产生大量的汽包致使水位上升,而此时给水量并没有增加。
课程设计---锅炉给水控制系统设计与仿真

3. 1串级系统内外回路控制器的整定及前馈补偿器的设计过程;
3.2对设计的串级三冲量给水控制系统进行仿真,分别给出汽包水位设定值扰动、给水流量扰动及蒸汽流量扰动下,给水控制系统的输出(即汽包水位)的响应曲线。
4.比较单级三冲量给水控制系统和串级三冲量给水控制系统。
二、主要内容
1.了解单元制锅炉给水全程控制方案;
2.设计单级三冲量给水控制系统,并进行仿真;
3.设计串级三冲量给水控制系统,并进行仿真。
三、进度计划
序号
设计内容
完成时间
备注
1
了解实现给水全程控制的关键技术;了解单元制锅炉给水全程控制方案;
1天
2
设计串级三冲量给水控制系统,并进行仿真;
1.5天
3
设计ห้องสมุดไป่ตู้级三冲量给水控制系统,并进行仿真;
或
这样,上图中的内回路可用比例环节代替。因此主回路可表示为下图:
可见,主回路也可看作一个单回路系统。它的等效调节器是具有比例调节的调节器,等效比例带为 。
根据以上的分析,整定主回路时,用试验方法求得对象的阶跃响应曲线,根据曲线的动态特性选择最优的等效比例带 ,求得相应的 。
由此可见,当变送器的斜率已经确定时,增大给水流量的灵敏度 ,等于增加主回路调节器的比例带,因此使给水流量动作缓慢,增加主回路稳定性。同时,必须相应增加调节
0.407
600
1.20
0.0083
0.370
600
1.30
0.0083
0.370
620
1.40
0.0083
0.370
650
1.20
0.0060
过程控制系统课程设计任务书——锅炉(水位控制)
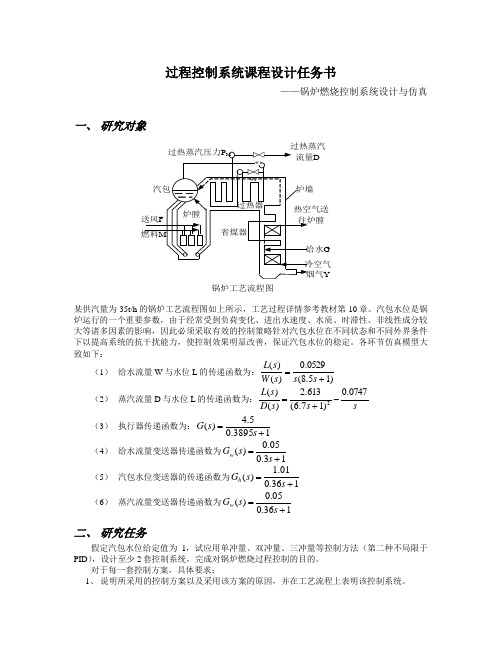
过程控制系统课程设计任务书——锅炉燃烧控制系统设计与仿真一、 研究对象某供汽量为35t/h 的锅炉工艺流程图如上所示,工艺过程详情参考教材第10章。
汽包水位是锅炉运行的一个重要参数,由于经常受到负荷变化、进出水速度、水质、时滞性、非线性成分较大等诸多因素的影响,因此必须采取有效的控制策略针对汽包水位在不同状态和不同外界条件下以提高系统的抗干扰能力,使控制效果明显改善,保证汽包水位的稳定。
各环节仿真模型大致如下:(1) 给水流量W 与水位L 的传递函数为:)15.8(0529.0)()(+=s s s W s L (2) 蒸汽流量D 与水位L 的传递函数为:ss s D s L 0747.0)17.6(613.2)()(2-+= (3) 执行器传递函数为:13895.05.4)(+=s s G (4) 给水流量变送器传递函数为13.005.0)(+=s s G w (5) 汽包水位变送器的传递函数为136.001.1)(+=s s G h (6) 蒸汽流量变送器传递函数为136.005.0)(+=s s G w 二、 研究任务假定汽包水位给定值为1,试应用单冲量、双冲量、三冲量等控制方法(第二种不局限于PID ),设计至少2套控制系统,完成对锅炉燃烧过程控制的目的。
对于每一套控制方案,具体要求:1、 说明所采用的控制方案以及采用该方案的原因,并在工艺流程上表明该控制系统。
D GY 锅炉工艺流程图2、确定所用控制器的正反作用,画出控制系统完整的方框图(需注明方框图各环节的输入输出信号),并选择合适的PID控制规律。
3、在SIMULINK仿真环境下,对所采用的控制系统进行仿真研究。
具体步骤包括:(1)在对象特性参数的变化范围内,确定各环节对象的传递函数模型,并构造SIMULINK对象模型;(2)引入手动/自动切换环节,在手动状态下对控制通道、干扰通道分别进行阶跃响应试验,以获得“广义对象”开环阶跃响应曲线;(3)依据PID参数整定方法,确定各控制器的参数;(4)在各控制器参数均保持不变的前提下,当对象特性在一定变化范围内发生变化时的响应曲线(鲁棒性);在发生干扰时系统的响应曲线(抗干扰能力)。
300MW锅炉给水DCS课程设计
目录第1章绪论 (2)1.1课题的背景与意义 (2)1.1.1锅炉给水控制的任务 (2)1.2给水控制系统中需要注意的问题 (4)1.2.1对测量信号进行压力温度校正 (4)1.2.2保证给水泵工作在安全工作区 (6)1.2.3保证控制系统切换应该是安全无扰的 (7)1.2.4 适应工况 (7)第2章汽包锅炉给水的控制方式 (7)2.1单冲量控制 (8)2.2三冲量控制 (8)第3章DCS的应用 (9)3.1单冲量控制算法组态: (9)3.2三冲量控制算法组态 (10)第4章传感器的选型及系统图 (11)4.1传感器的选型 (11)4.2 I/O点清单 (12)4.2 汽包炉单元机组给水控制系统 (13)4.3 结论 (13)第1章绪论1.1课题的背景与意义锅炉正常运行中,汽包液位是一个重要的见识参数,它反映了锅炉负荷与给水的动平衡关系。
液位过高,会影响汽水分离的效果,产生蒸汽带液现象,液位过低会破坏水循环,影响省煤器运行,容易使水全部汽化烧坏锅炉甚至爆炸。
因此及时而准确地把水位控制在允许的围之,并能适应各种工况的运行,是保证机炉安全运行的重要条件。
1.1.1锅炉给水控制的任务给水控制的任务是维持汽包水位在工艺允许围。
由于影响汽包水位的几个因素中,燃料量的扰动影响较小,因此,汽包水位的控制中,主要的目的是以汽包水位为被控变量,以调节给水流量为控制手段。
同时,由于汽包水位不仅受锅炉侧的影响,也受到汽轮机侧的影响,当锅炉负荷变化或汽轮机用汽量变化时,给水控制都应该能限制汽包水位只在给定的围变化。
其主要控制要求如下:保持汽包水位在规定的围:锅炉汽包水位的高度,关系到汽水分离的速度和生产蒸汽的质量,也是确保安全生产的重要条件。
如果锅炉汽包水位过高,就会影响汽包水位分离装置的正常工作,造成出口蒸汽水分过多,结果可能会使过热器受热面结垢而导致过热器烧坏,并会引起汽轮机叶片上结垢增加,严重时将损坏汽轮机叶片,同时,还会使过热器气温产生急剧变化,直接影响机组运行的经济性和安全性。
锅炉内胆水温前馈——反馈控制系统设计与实验仿真

学生姓名: 学 班 号: 级:
许秀忠 200752050229 测控 07-2 汽车与机械工程学院 刘晖 2011.6
所在院(系): 指导教师: 完成日期:
锅炉内胆水温前馈——反馈控制系统与实验仿真
锅炉内胆水温前馈——反馈控制系统设计与实验仿真
摘要
随着控制理论的不断发展,过程控制在工业生产中得到了广泛应用[11]。在本设计中以 锅炉内胆水温前馈——反馈控制系统为研究目标, 在 MCGS 组态软件的环境下, 以 PID 控 制算法进行过程控制,并在本设计中对锅炉内胆水温前馈——反馈控制系统进行设计与实 验仿真。该设计分析了锅炉内胆水温动态特性的测试方法,利用 MCGS 组态软件完成了系 统所需要的主控操作界面、运行状态界面、数据浏览界面、实时运行曲线界面的设计,在 THJ-2 型设备试验平台上进行了相关调试及理论验证,最终达到了前馈——反馈控制系统 的设计目的。
Key words: feedforward - feedback integrated control; experiment simulation; MCGS configuration
锅炉内胆水温前馈——反馈控制系统与实验仿真
目 录
1 绪论 ...................................................................................................................... 1 1.1 简介 ............................................................................................................... 1 1.2 前馈——反馈综合控制 ............................................................................... 1 1.3 本文所做的工作 ........................................................................................... 2 2 前馈——反馈控制系统概述 .............................................................................. 3 2.1 实验装置简述 ............................................................................................... 3 2.1.1 系统简介 ............................................................................................ 3 2.1.2 系统组成 ............................................................................................ 3 2.1.3 仪表综合控制台 ................................................................................ 7 2.1.4 系统特点 ............................................................................................ 7 2.1.5 系统软件 ............................................................................................ 8 2.1.6 装置的安全保护体系 ........................................................................ 9 2.2 锅炉内胆水温的前馈——反馈控制系统设计 ......................................... 12 2.3 MCGS软件组态设计................................................................................... 15 2.4 MCGS实时数据库的概念........................................................................... 17 2.4.1 数据对象的类型 .............................................................................. 18 2.4.2 数据后处理 ...................................................................................... 20 3 前馈——反馈控制系统在试验平台上的运行测试........................................ 24 3.1 实验设备 ..................................................................................................... 24 3.2 实验内容与操作 ......................................................................................... 24 3.3 系统实验仿真结果分析 ............................................................................. 25 4 结论 .................................................................................................................... 30 参考文献 ................................................................................................................ 31 致谢 ........................................................................................................................ 32
过程控制仪表课程设计(锅炉汽包水位控制系统)
University of South China过程控制仪表课程设计题目锅炉汽包水位控制系统学生姓名专业班级自动化073班学号指导老师高飞燕唐耀庚2010年12月26日锅炉汽包水位控制系统锅炉是电厂和化工厂里常见的生产设备,为了使锅炉能正常运行,必须维持锅炉的水位在一定的范围内,这就需要控制锅炉汽包的水位。
汽包水位很重要,水位过高会影响汽水分离的效果,使蒸汽带液,损坏汽轮机叶片;如果水位过低会损坏锅炉,甚至引起爆炸。
可见锅炉汽包水位控制在锅炉设备控制系统中的重要性。
本论文设计的是锅炉汽包水位控制系统,利用控制装置和被控对象组成了一个自动控制系统。
被调量是汽包水位,调节量是给谁量。
它主要考虑汽包内部物料平衡,使给水量适应锅炉的挥发量,维持汽包中水位在工艺允许的范围内。
一、汽包水位调节对象的干扰分析锅炉的汽水系统原理图如图1所示。
影响汽包水位变化的干扰因素有:给水量的干扰,蒸汽负荷变化,燃料量变化,汽包压力变化等。
汽包压力变化不是直接影响水位的,而是通过汽包压力升高时的“自凝结”和压力降低时的“自蒸发”过程引起水位变化的。
况且,压力变化的原因往往是出于热负荷和蒸汽负荷的变化所引起的故这一干扰可以放到其他干扰中考虑。
燃烧流量的变化要经过燃烧系统变成热量,才能为水吸收,继而影响气化量,这个干扰通道的传递滞后都比较大。
蒸汽负荷变化时按用户需要量而改变的不可控因素。
剩下的只有给水量可作为调节参数。
二.锅炉汽包水位的动态特性1.汽包水位在给水量作用下的动态特图2所示是给水量作用下,水位的阶跃响应曲线。
把汽包和给谁看做单容量无自衡过程,水位阶跃响应如图中H1线。
考虑到给水温度低于汽包内的饱和水温度,当它进入汽包后吸收了原来的饱和水中的一部分热量,使锅炉的蒸汽产量下降,水面以下的汽包总体积Vs也就相应减小,导致水位下降。
Vs对对水位的影响可以用图中的曲线H2表示。
水位H的实际响应曲线是H1和H2的总和。
从图可知,响应过程有一段迟延时间τ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 2010–2011年度第 2 学期)
名称:过程控制
题目:锅炉给水控制系统设计与仿真
院系:控制与计算机工程学院
班级:自动0805班
学号:
学生姓名:
指导教师:
设计周数:
成绩:
2011年06月25日
《过程控制》课程设计
任务书
一、目的与要求
1.目的
通过该课程设计,使学生进一步掌握过程控制课程主要内容,深入理解过程控制系统的分析与综合。
或
这样,上图中的内回路可用比例环节代替。因此主回路可表示为下图:
可见,主回路也可看作一个单回路系统。它的等效调节器是具有比例调节的调节器,等效比例带为 。
根据以上的分析,整定主回路时,用试验方法求得对象的阶跃响应曲线,根据曲线的动态特性选择最优的等效比例带 ,求得相应的 。
由此可见,当变送器的斜率已经确定时,增大给水流量的灵敏度 ,等于增加主回路调节器的比例带,因此使给水流量动作缓慢,增加主回路稳定性。同时,必须相应增加调节
(4)仿真曲线如下:
蒸汽流量D阶跃扰动下汽包水位H的响应曲线:
给水流量W阶跃扰动下汽包水位H的响应曲线:
汽包水位设定值阶跃扰动下汽包水位H的响应曲线:
2. 1反馈控制器整定及前馈补偿器的设计过程;
2.2对设计的单级三冲量给水控制系统进行仿真,分别给出汽包水位设定值扰动、给水流量扰动及蒸汽流量扰动下,给水控制系统的输出(即汽包水位)的响应曲线。
3. 串级三冲量给水控制系统的设计与仿真。
3. 1串级系统内外回路控制器的整定及前馈补偿器的设计过程;
3.2对设计的串级三冲量给水控制系统进行仿真,分别给出汽包水位设定值扰动、给水流量扰动及蒸汽流量扰动下,给水控制系统的输出(即汽包水位)的响应曲线。
4.比较单级三冲量给水控制系统和串级三冲量给水控制系统。
5.课程设计的体会
五、考核方式
结合学生提交的“过程控制”课程设计报告书,对学生进行口试。
2011年6月26日
设计正文
某汽包锅炉,根据给水流量W做单位阶跃扰动时的汽包水位H的响应曲线可知
根据蒸汽流量D做单位阶跃扰动时的汽包水位H的响应曲线可知
已知:
给水流量测量变送器的传递函数为
蒸汽流量测量变送器的传递函数为
水位测量变送器的传递函数为
执行器与阀门传递函数乘积为
一、设计单级三冲量给水控制系统(其中调节器采用PI调节),叙述控制系统整定过程;对系统进行仿真,分别给出在蒸汽io流量D、给水流量W和汽包水位设定值阶跃扰动下汽包水位H的响应曲线;
单级三冲量给水控制系统原理图
单级三冲量Simulink组态图:
调节器采用PI控制规律,其传递函数为
控制对象的传递函数为
给水流量测量变送器和蒸汽流量测量变送器的斜率为
水位测量变送器的斜率为
执行器和调节阀传递函数的乘积为
给水流量反馈装置和蒸汽流量前馈装置 、 均为比例环节,整定 、 、 、 过程如下:
(1)内回路的整定
内回路方框图如下图所示:
可以把内回路作为一般的单回路系统进行分析。如果把调节器以外的环节等效地看作被控对象,那么被控对象动态特性近似为比例环节(因为执行器、调节器、变送设备和给水流量反馈装置都可以近似认为是比例环节)。因此调节器的比例带 和积分的时间 都可以取得很小。 和 的具体数值可以用试探方法决定以保证内回路不振荡为原则,一般 。在试探时,给水流量反馈装置的传递函数(给水流量信号的灵敏度) 可任意设置一个数值,得到满意的 值,如果以后 有必要改变,则应相应地改变 值,使保持试探时的值,以保证内回路的开环放大倍数不变。
1
了解实现给水全程控制的关键技术;了解单元制锅炉给水全程控制方案;
1天
2
设计串级三冲量给水控制系统,并进行仿真;
1.5天
3
设计单级三冲量给水控制系统,并进行仿真;
1.5天
4
整理仿真结果,写课程设计论文;准备答辩。
1天
四、设计(实验)成果要求
1.过程控制课程设计任务简介。
2.单级三冲量给水控制系统的设计与仿真。
0.20
21
15
3
5.0
0.17
20
21
3
7.0
0.13
18
30
3
10
0.11
18
6
2
3.0
0.33
18
12
2
6.0
0.20
15
20
2
10
0.09
13
30
2
15
0.09
11
则有数据表格中的数据选择最佳数据为:Kp=20,Ti=2,Ki=10
则内回路整定的仿真曲线如下:
(2)主回路整定:
在内回路经过正确整定后,其控制过程是非常快的。这是因为调节器为比例积分 和 设置非常得较小,故它能快速动作。外来控制信号改变时,调节器几乎立即成比例地改变给水流量W,使 , 即是:
主回器比例带 以保证 不变。
即
得
在 附近用试凑法对参数 进行整定。
参数整定过程的数据表格为:
内回路等效比例环节
超调量σ
调节时间Ts
0.9
0.131
530
2.0
0.137
510
5.0
0.145
450
10.0
0.161
400
12.0
0.173
380
12.5
0.180
370
13.3
0.195
360
14
0.203
2. 要求
要求学生:1)了解实现给水全程控制的关键技术;2)了解单元制锅炉给水全程控制方案;3)能够进行给水控制系统的设计与仿真。
二、主要内容
1.了解单元制锅炉给水全程控制方案;
2.设计单级三冲量给水控制系统,并进行仿真;
3.设计串级三冲量给水控制系统,并进行仿真。
三、进度计划
序号
设计内容
完成时间
备注
所以副回路整定对应的数据表格为:
比例增益Kp
积分时间Ti
积分增益Ki=Kp/Ti
峰值
调节时间Ts
9
9
1.0
0.25
70
12
9
1.33
0.20
60
20
95
9
2.78
0.13
49
6
5
1.2
0.33
45
12
5
2.4
0.20
35
15
5
3.0
0.16
33
30
5
6.0
0.15
30
12
3
4.0
340
15
0.218
340
18
0.241
340
则选择最佳的 为14。
则此时对应的 =0.95对应的Kp=19 Ki=10 =0.053 Ti=1.9
此时外回路参数整定的仿真图像为:
(3)按无静差要求,整定
根据 ,得出 =0.95。
上述整定参数要经过现场投试的检验,如果在控制过程中主回路衰减率过高或过低,(观察水位记录曲线),应改变给水量反馈装置的参数 值。当主回路衰减率偏低时,应增加 值;反之则减小 值。在整定 值的数值时,应注意同时改变调节器的参数 值,使 / 的比值保持不变,以保证内回路能够保持实验整定时所选定的稳定性裕量。