分形维数代码
图形学实验一 三维分形(附源代码)
实验报告实验名称:三维分形算法姓名:陈怡东学号:09008406程序使用说明:程序打开后会呈现出3次分形后的四面体,因为考虑到观察效果的清晰所以就用了3次分形作为演示。
与用户的交互:1键盘交互:分别按下键盘上的数字键1,2,3,4可以分别改变四面体的4个面的颜色。
按下字母c(不区别大小写)可以改变视图函数,这里循环切换3种视图函数:glOrtho,glFrustum,gluPerspective,但是改变视图函数后要窗口形状变化后才能显现出来按下字母键q(不区别大小写)可以退出程序2鼠标交互:打开后在绘图的区域按下鼠标左键不放便可以拖动图形的视角,这里为了展现图形的3D效果因此固定了其中一点不放,这样就可以看到3D的效果。
鼠标右击则有弹出菜单显示,其中改变颜色则是同时改变4个面的颜色,本程序中运用了8组配色方案。
改变视图函数也是上述的3种函数,这里的效果立刻显现,但是还有很多问题达不到所要的效果,希望老师能帮忙解决一下。
设计思路:分形算法:把四面体细分成更小的四面体,先找出其6个棱的中点并连接起来,这样就在4个顶点处各有一个小的四面体,原来四面体中剩下的部分应当去掉。
仿效二维的生成方法,我们对保留的四个小四面体进行迭代细分。
这样细分结束后通过绘制4个三角形来绘制每一个剩下的四面体。
交互的实现:键盘交互,即通过对按键的响应写上响应函数实现对视图和颜色的改变。
鼠标交互:通过对鼠标左右按键的实现:该部分只做了必要的介绍,具体实现见代码(附注释)分形算法:void tetra(GLfloat *a,GLfloat *b,GLfloat *c,GLfloat *d)函数实现的是绘制四面体并且给四个面绘上不同的颜色。
以区别开来,函数的实现细节见代码,有注释介绍。
void triangle3(GLfloat *a,GLfloat *b,GLfloat *c)函数用来绘制每个平面细分后的三角形。
其中顶点设置为3维坐标glVertex3fv(a);void divide_tetra(GLfloat *a,GLfloat *b,GLfloat *c,GLfloat *d,int m)细分四面体的函数实现。
第7章 分形维数应用与MATLAB实现
第七章
MATLAB优化算法案例分析与应用
•7.1 分形盒维数概述
分形盒维数分为以下几类。 (1)相似维数:若某图形是由把全体缩小成 1/a的b个相似形所组成,由于 ,则有 。 (2)Kolmogorov容量维数:用半径为 的d维球包覆某d维图形集合时,假定 是球的个数的最小值。容量维数 可用下式来定义: (3)盒子维数(box-counting dimension):在双对数坐标纸上画出 对 的曲 线,其直线部分的斜率就是此分形对象的盒子孙维数 。 是小盒子的边长, 为 盒子数。 (4)信息维数(information dimension):把小盒子编号,如果知道分形中 的点落入第i只盒子的概率是 ,定义“信息维数” , 。 (5)关联维数(correlation dimension):如果把在空间随机分布的某量坐 标X处中的密度记为 ,则关联函数 , 表示平均。可以是全体平均,也可以是 空间平均。1983年,P. Grassberger和J. Procassia给出了关联维数的定义 。 (6)广义维数:H. G. E. Hentschel等提出了广义维数的概念,其定义是: ,其中 是 阶Renyi信息, 叫作q阶广义维数,有时也叫Renyi信息维数。 分形盒维数应用较广泛,在用数字图像盒维数法求得分维值时增大图像的 大小可以降低分维值计算的误差。信号时域短时分形盒维数进行低信噪比的带 噪信号的计算机仿真表明,该方法能较准确地检测低信噪比下的语音端点,并 且其算法也相对简单。
第七章
MATLAB优化算法案例分析与应用
•7.2 二维图像分形盒维数分析
图7- 1 大树分形计算
第七章
MATLAB优化算法案例分析与应用
Rmax=sqrt((M-1)^2+(N-1)^2); %求最大距离 Nr=zeros(1,floor(Rmax)); for k=1:floor(Rmax) for i=1:M for j=1:N for m=1:M for n=1:N if k==1 TotalGary=TotalGary+double(abs(I(i,j)-I(m,n))); end if k<=sqrt((i-m)^2+(j-n)^2)&sqrt((i-m)^2+(j-n)^2)<(k+1) Nr(k)=Nr(k)+1; end end; end; end; end; end; k=[1:floor(Rmax)]; E=2.*TotalGary.*ones(1,floor(Rmax))./Nr(1,floor(Rmax)); [P ,s]=polyfit(log(k),log(E),1); D=3-P(1);
分形与迭代
实验三迭代与分形一、实验目的与要求1.了解分形几何的基本情况;2.了解通过迭代方式产生分形图的方法;3.了解matlab软件中简单的程序结构;4.掌握matlab软件中plot, fill等函数的基本用法;二、问题描述1.对一个等边三角形,每条边按照Koch曲线的方式进行迭代,产生的分形图称为Koch雪花。
编制程序绘制出它的图形,并计算Koch雪花的面积,以及它的分形维数。
2.自己构造生成元(要有创意),按照图形迭代的方式产生分形图,用计算机编制程序绘制出它的图形,并计算其分形维数。
三、问题分析1.第一题要求我们利用一个等边三角形然后在三角形的基础上利用理论课上的Koch曲线的画法,产生一朵Koch雪花,由于Koch雪花的产生相当于将三条等长的直线分别产生的Koch曲线按照等边三角形的坐标形式组合起来然后在同一个坐标系中表示出来,这就形成了Koch雪花图案。
四、背景知识介绍1.什么是迭代迭代法是常用的一种数学方法,就是将一种规则反复作用在某个对象上,它可以产生非常复杂的行为。
我们这里介绍图形迭代和函数迭代两种方式。
(1)图形迭代。
给定初始图形F0,以及一个替换规则R,将R反复作用在初始图形F0上,产生一个图形序列:R(F0)=F1,R(F1)=F2,R(F2)=F3,…(2)函数迭代。
给定初始值x0,以及一个函数f(x),将f(x)反复作用在初始值x0上,产生一个数列:f(x)=x1,f(x1)=x2,f(x2)=x3,…2.p lot函数介绍plot是最重要最基本的二维曲线绘图指令,基本功能是画折线和曲线。
基本调用格式如下:(1)plot(Y,LineSpec)。
其中,Y一般是数组;而LineSpec是用来指定线型、色彩等的选项字符串,可省略。
本功能是以数组Y作为竖坐标,以数组元素的下标为横坐标,画出一条折线。
当数组元素很多时,就出现连续曲线的效果。
(2) plot(X,Y)。
其中,X、Y一般是相同长度的数组。
广义分形维数的参数
广义分形维数的参数
广义分形维数(也称为Minkowski-Bouligand维数或箱计数维数)是用来描述分形结构复杂度的参数之一。
这个维数通常用来度量一个对象的空间维度,尤其是对于那些不规则的、复杂的几何形状。
广义分形维数可以根据不同的测量方法和上下文而有不同的定义,但通常有两种常见的参数:
1. 盒子计数参数(Box-Counting Dimension):这是最常见的广义分形维数定义之一。
它涉及到将一个空间分成较小的盒子,然后计算分形对象占据的这些盒子的数量。
这个定义通常用D表示。
在这种情况下,广义分形维数D可以通过以下公式计算:
D = lim (log(N) / log(1/ε))
其中N是分形对象在ε尺度下的盒子数,ε是盒子的尺寸,lim 表示当ε趋于0时的极限。
2. 信息维数参数(Information Dimension):这个参数更侧重于描述分形对象的信息内容。
信息维数通常用Df表示,它可以通过以下公式计算:
Df = -lim (log(P(ε)) / log(ε))
其中P(ε)是分形对象上ε尺度下的盒子覆盖概率,lim表示当ε趋于0时的极限。
需要注意的是,广义分形维数的计算方法可以因研究问题而有所不同,因此具体的参数和计算方式可能会根据上下文和应用而变化。
这些参数通常用于分析分形几何对象,以了解它们的复杂性和自相似性。
MATLAB环境下图像分形维数的计算
也有采用递减序列进行像素点覆盖,递减序列 的构造有多种方法,普遍使用的是二等分序列,也 就是将图像逐次二等分.所采用的序列的最大值都 将取决于图像的大小.网格的最小值始终为1,这 是划分网格的极限.
根据分形维数的定义,块的尺寸越小,计算出 的图像的维数越精确,但对于存储在计算机内的分 形图像,只能分割到像素点尺寸,就不能再继续分 割下去了.因此,当讨论图像的分形性质时,可以取 一个像素点的尺寸作为尺度下限,为了避免奇异情 形的发生,在计算分形维数的过程中,要求有适当 多的测试点,至于尺度上限可根据具体情况和具体 要求进行确定.
(1.中国矿业大学资源与安全工程学院,北京100083;2.中原工学院数理系,河南郑州450007)
摘要:利用MATLAB的图像处理和数值计算功能,对大气可吸入颗粒物的场发射电镜
(FESEM)图像进行处理,得到颗粒物边界的二值图像;编制MATLAB程序,统计一系列以不同
像素数量为边长的正方形块覆盖二值图像时的个数,根据像素数量和正方形块个数之间的关系,
确定图像的计盒维数.结果表明:MATLAB对分形图像的处理简单、方便,通过科赫曲线、谢宾
斯基填料等有规分形图形分形维数的计算表明该方法计算出的结果准确、可靠.对大气颗粒物的
分形维数的计算表明,不同不规则程度的颗粒物有不同的分形维数,可以通过颗粒物分形维数的
计算分析颗粒物的来源和输运过程.
递归算法生成3维分形树ByLinking(Matlab代码)(2)
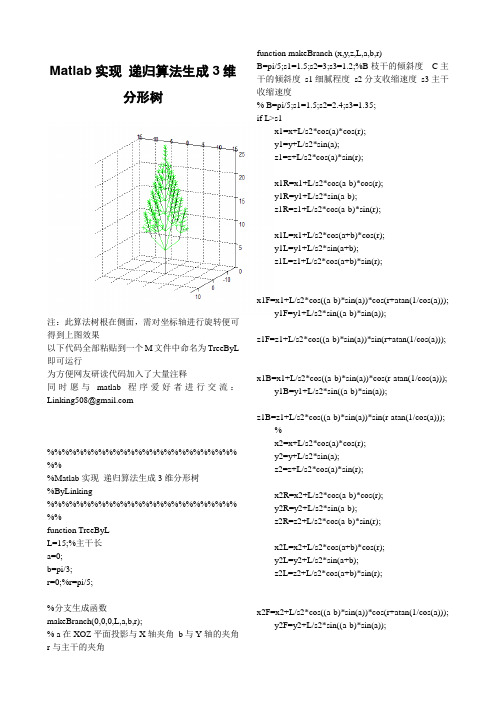
Matlab实现递归算法生成3维分形树注:此算法树根在侧面,需对坐标轴进行旋转便可得到上图效果以下代码全部粘贴到一个M文件中命名为TreeByL 即可运行为方便网友研读代码加入了大量注释同时愿与matlab程序爱好者进行交流:Linking508@%%%%%%%%%%%%%%%%%%%%%%%%%% %%%Matlab实现递归算法生成3维分形树%ByLinking %%%%%%%%%%%%%%%%%%%%%%%%%% %%function TreeByLL=15;%主干长a=0;b=pi/3;r=0;%r=pi/5;%分支生成函数makeBranch(0,0,0,L,a,b,r);% a在XOZ平面投影与X轴夹角b与Y轴的夹角r与主干的夹角function makeBranch (x,y,z,L,a,b,r)B=pi/5;s1=1.5;s2=3;s3=1.2;%B枝干的倾斜度C主干的倾斜度s1细腻程度s2分支收缩速度s3主干收缩速度% B=pi/5;s1=1.5;s2=2.4;s3=1.35;if L>s1x1=x+L/s2*cos(a)*cos(r);y1=y+L/s2*sin(a);z1=z+L/s2*cos(a)*sin(r);x1R=x1+L/s2*cos(a-b)*cos(r);y1R=y1+L/s2*sin(a-b);z1R=z1+L/s2*cos(a-b)*sin(r);x1L=x1+L/s2*cos(a+b)*cos(r);y1L=y1+L/s2*sin(a+b);z1L=z1+L/s2*cos(a+b)*sin(r);x1F=x1+L/s2*cos((a-b)*sin(a))*cos(r+atan(1/cos(a)));y1F=y1+L/s2*sin((a-b)*sin(a));z1F=z1+L/s2*cos((a-b)*sin(a))*sin(r+atan(1/cos(a)));x1B=x1+L/s2*cos((a-b)*sin(a))*cos(r-atan(1/cos(a)));y1B=y1+L/s2*sin((a-b)*sin(a));z1B=z1+L/s2*cos((a-b)*sin(a))*sin(r-atan(1/cos(a)));%------------------------------------------------------x2=x+L/s2*cos(a)*cos(r);y2=y+L/s2*sin(a);z2=z+L/s2*cos(a)*sin(r);x2R=x2+L/s2*cos(a-b)*cos(r);y2R=y2+L/s2*sin(a-b);z2R=z2+L/s2*cos(a-b)*sin(r);x2L=x2+L/s2*cos(a+b)*cos(r);y2L=y2+L/s2*sin(a+b);z2L=z2+L/s2*cos(a+b)*sin(r);x2F=x2+L/s2*cos((a-b)*sin(a))*cos(r+atan(1/cos(a)));y2F=y2+L/s2*sin((a-b)*sin(a));z2F=z2+L/s2*cos((a-b)*sin(a))*sin(r+atan(1/cos(a)));x2B=x2+L/s2*cos((a-b)*sin(a))*cos(r-atan(1/cos(a)));y2B=y2+L/s2*sin((a-b)*sin(a));z2B=z2+L/s2*cos((a-b)*sin(a))*sin(r-atan(1/cos(a)));plot3([x,x2],[y,y2],[z,z2],'k');holdon;set(gcf,'color','w');grid on;view(pi/2,0);%axis off;xlabel('X Label');ylabel('Y Label');zlabel('Z Label');set(gca,'xlim',[0,25],'ylim',[-15,15],'zlim',[-15,15]);plot3([x2,x2R],[y2,y2R],[z2,z2R],'g');hold on;plot3([x2,x2L],[y2,y2L],[z2,z2L],'g');hold on;plot3([x2,x2B],[y2,y2B],[z2,z2B],'g');hold on;plot3([x2,x2F],[y2,y2F],[z2,z2F],'g');hold on;plot3([x1,x1R],[y1,y1R],[z1,z1R],'g');hold on;plot3([x1,x1L],[y1,y1L],[z1,z1L],'g');hold on;plot3([x1,x1B],[y1,y1B],[z1,z1B],'g');hold on;plot3([x1,x1F],[y1,y1F],[z1,z1F],'g');hold on;%------------------------------------------------------makeBranch(x2,y2,z2,L/s3,a,b,r);makeBranch(x2L,y2L,z2L,L/s2,a,b,r+B);makeBranch(x2B,y2B,z2B,L/s2,a,b,r-B);makeBranch(x2F,y2F,z2F,L/s2,a,b,r+B);makeBranch(x2R,y2R,z2R,L/s2,a,b,r-B);makeBranch(x1L,y1L,z1L,L/s2,a,b,r+B);makeBranch(x1B,y1B,z1B,L/s2,a,b,r-B);makeBranch(x1F,y1F,z1F,L/s2,a,b,r+B);makeBranch(x1R,y1R,z1R,L/s2,a,b,r-B);end。
分形维数--matlab
一维曲线分形维数的matlab程序function D=FractalDim(y,cellmax)%求输入一维信号的计盒分形维数%y是一维信号%cellmax:方格子的最大边长,可以取2的偶数次幂次(1,2,4,8...),取大于数据长度的偶数%D是y的计盒维数(一般情况下D>=1),D=lim(log(N(e))/log(k/e)),if cellmax<length(y)error('cellmax must be larger than input signal!')endL=length(y);%输入样点的个数y_min=min(y);%移位操作,将y_min移到坐标0点y_shift=y-y_min;%重采样,使总点数等于cellmax+1x_ord=[0:L-1]./(L-1);xx_ord=[0:cellmax]./(cellmax);y_interp=interp1(x_ord,y_shift,xx_ord);%按比例缩放y,使最大值为2^^cys_max=max(y_interp);factory=cellmax/ys_max;yy=abs(y_interp*factory);t=log2(cellmax)+1;%叠代次数for e=1:tNe=0;%累积覆盖信号的格子的总数cellsize=2^(e-1);%每次的格子大小NumSeg(e)=cellmax/cellsize;%横轴划分成的段数for j=1:NumSeg(e) %由横轴第一个段起通过计算纵轴跨越的格子数累积N(e)begin=cellsize*(j-1)+1;%每一段的起始tail=cellsize*j+1;seg=[begin:tail];%段坐标yy_max=max(yy(seg));yy_min=min(yy(seg));up=ceil(yy_max/cellsize);down=floor(yy_min/cellsize);Ns=up-down;% 本段曲线占有的格子数Ne=Ne+Ns;%累加每一段覆盖曲线的格子数endN(e)=Ne;%记录每e下的N(e)end%对log(N(e))和log(k/e)进行最小二乘的一次曲线拟合,斜率就是Dr=-diff(log2(N));%去掉r超过2和小于1的野点数据id=find(r<=2&r>=1);%保留的数据点Ne=N(id);e=NumSeg(id);P=polyfit(log2(e),log2(Ne),1);%一次曲线拟合返回斜率和截距D=P(1);。
matlab用结构函数法计算分形维数程序__理论说明

matlab用结构函数法计算分形维数程序理论说明1. 引言1.1 概述本文旨在介绍使用结构函数法计算分形维数的程序和相关理论。
分形维数是描述自然界和人工物体中不规则结构复杂程度的重要指标之一,它能够定量衡量对象的自相似性和尺度变换特征。
而结构函数法是一种计算分形维数的常用方法,它通过测量对象的尺度不变性来实现对分形维数的求解。
1.2 文章结构本文共分为四个部分;引言部分即本章首先对文章进行概述和简介;接着第二部分将介绍分形维数的基本概念以及与结构函数法计算之间的关系;第三部分将详细介绍如何在Matlab环境下使用结构函数法来计算分形维数,并给出具体示例数据和结果展示;最后,第四部分将给出总结,回顾研究目的,总结各种方法并展望改进和应用前景。
1.3 目的本文旨在向读者介绍使用Matlab编写程序进行结构函数法计算分形维数的方法,并通过具体数据案例展示其有效性。
通过本文的阅读,读者将了解到什么是分形维数以及在实际研究中如何使用结构函数法来计算分形维数。
同时,本文还将讨论该方法的优缺点,并探究其未来的应用前景和改进方向。
以上是关于“1. 引言”部分的详细内容,希望能对您撰写长文提供帮助。
2. 正文:2.1 分形维数的基本概念分形维数是描述分形对象复杂程度的重要指标。
分形是一类特殊的几何结构,具有自相似性和无限细节等特征。
分形维数通常用于量化描述分形对象的粗糙程度和层级结构。
2.2 结构函数法与分形维数计算的关系结构函数法是一种常用于计算分形维数的方法,其基本思想是通过结构函数来测量物体在不同尺度下的信息量。
结构函数可以通过计算物体上不同区域内对应尺度上像素值差异的平均值来得到。
分析这些差异可以揭示出物体在不同尺度下的内在结构规律,从而计算出其分形维数。
2.3 Matlab中使用结构函数法计算分形维数的程序步骤在Matlab中使用结构函数法计算分形维数需要以下步骤:步骤1: 读取并预处理图像或数据集。
首先将图像或数据集转换为灰度图像,并进行必要的预处理操作(如噪声去除、平滑等),以便更好地提取其结构信息。
petrosian分形维数

petrosian分形维数Petrosian分形维数Petrosian分形维数是一种用于描述信号或数据的复杂性和自相似性的分形维数。
它由Armenak Petrosian于1995年提出,并广泛应用于信号处理、生物医学工程、金融市场分析等领域。
在这篇文章中,我们将介绍Petrosian分形维数的概念、计算方法以及其在实际应用中的意义。
Petrosian分形维数是一种用于衡量时间序列数据的分形特征的数学工具。
它基于信号的自相似性,即信号在不同时间尺度上的相似性。
自相似性是一种重要的特征,它意味着信号的局部结构在不同的时间尺度下具有相似的特征。
Petrosian分形维数可以帮助我们揭示信号的自相似性并量化其复杂性。
计算Petrosian分形维数的方法相对简单,但非常有效。
首先,我们需要计算信号的Petrosian函数,该函数定义为信号中零交叉的次数减去其近似的平均值。
然后,我们计算Petrosian函数的标准差,并将其除以信号的标准差,得到Petrosian分形维数。
Petrosian分形维数越大,表示信号越复杂。
Petrosian分形维数在信号处理领域有着广泛的应用。
首先,它可以用于分析生物医学信号,如脑电图(EEG)、心电图(ECG)等。
通过计算Petrosian分形维数,我们可以评估这些信号的复杂性,并从中获取有关疾病状态或脑功能的重要信息。
例如,在脑电图中,Petrosian分形维数可以用于评估脑电活动的稳定性和变化,从而帮助医生诊断和治疗癫痫等疾病。
Petrosian分形维数还可以应用于金融市场分析。
金融市场的价格变动通常具有自相似性,即价格的涨跌模式在不同的时间尺度上具有相似的特征。
通过计算金融时间序列数据的Petrosian分形维数,我们可以评估市场的复杂性和波动性。
这对于投资者来说是非常重要的,因为它可以帮助他们预测市场的走势和制定投资策略。
除了上述应用之外,Petrosian分形维数还可以在其他领域中发挥作用。
分形与分形维数

分形与分形维数分类号O469 学校代码10495UDC530 学号0145023006武汉科技学院硕⼠学位论⽂⽆序系统中的分形⽣长研究作者姓名:⽥志华指导教师:⽥巨平教授学科门类:⼯学专业:机械设计及理论研究⽅向:分形与多孔介质完成⽇期:⼆零零七年四⽉Wuhan University of Science and EngineeringM. S. DissertationThe study of fractal growthin disorder systemByTIAN Zhi-huaDirected byProfessor TIAN Ju-pingApril 2007独创性声明本⼈郑重声明:所呈交的学位论⽂,是本⼈在导师的指导下,独⽴进⾏研究⼯作所取得的成果。
除⽂中已经注明引⽤的内容外,本论⽂不包含任何其他个⼈或集体已经发表或撰写过的作品成果。
对本⽂的研究作出重要贡献的个⼈和集体,均已在⽂中以明确⽅式标明。
本⼈完全意识到本声明的法律结果由本⼈承担。
学位论⽂作者签名:签字⽇期:年⽉⽇学位论⽂版权使⽤授权书本学位论⽂作者完全了解武汉科技学院有关保留、使⽤学位论⽂的规定。
特授权武汉科技学院可以将学位论⽂的全部或部分内容编⼊有关数据库进⾏检索,并采⽤影印、缩印或扫描等复制⼿段保存、汇编以供查阅和借阅。
同意学校向国家有关部门或机构送交论⽂的复印件和磁盘。
(保密的学位论⽂在解密后适⽤本授权说明)学位论⽂作者签名:导师签名:签字⽇期:年⽉⽇签字⽇期:年⽉⽇论⽂题⽬:⽆序系统中的分形⽣长研究专业:机械设计及理论硕⼠⽣:指导⽼师:摘要本⽂⾸先概述了分形理论的发展,分形和分形维数的定义,以及产⽣分形的物理机制与⽣长机制。
简要介绍了模拟分形⽣长的扩散置限凝聚(DLA)、电介质击穿 (DBM)、粘性指延(Viscous Fingering)、渗流等模型。
本⽂采⽤映射膨胀法构造了两种不同的Sierpinski地毯,运⽤Monte Carlo ⽅法研究了两种Sierpinski地毯中的有限扩散凝聚(DLA)⽣长。
结构函数法计算分形维数的matlab程序代码_概述说明

结构函数法计算分形维数的matlab程序代码概述说明1. 引言1.1 概述本文旨在介绍结构函数法用于计算分形维数的Matlab程序代码的实现过程。
分形维数是一种用于描述不规则对象复杂度和粗糙度的数学概念,具有广泛的应用领域,包括图像处理、地质学、生物学等。
结构函数法是一种常用的计算分形维数的方法,通过对信号数据进行结构函数的计算和分析来获取其分形特征。
1.2 文章结构本文首先介绍了文章的背景和目标,概述了结构函数法计算分形维数的基本原理和流程。
然后详细介绍了Matlab程序代码的实现步骤和方法。
接着通过实际案例验证了程序代码的准确性,并进行了结果展示和分析。
最后总结文章所取得的主要研究成果,并提出存在问题与改进方向以及后续研究展望。
1.3 目的本文旨在提供一个完整而详尽的指南,帮助读者理解并掌握使用结构函数法计算分形维数的Matlab程序代码编写与实现过程。
通过该程序代码,读者可以快速而准确地计算各种信号数据的分形维数,并据此分析其复杂度和粗糙度特征。
本文的目标是为读者提供一个清晰、可操作的实践指南,以便他们能够在相关领域开展深入研究和应用。
2. 结构函数法计算分形维数2.1 分形维数简介分形维数是衡量分形结构复杂度的一种重要指标,用于描述物体在不同尺度下的自相似性。
在自然界和工程领域中,很多现象都具有分形特征,如云朵、山脉、树枝等。
分形维数可以帮助我们理解和研究这些复杂系统。
2.2 结构函数法原理结构函数法是一种常用的计算分形维数的方法。
其基本思想是通过测量数据集在不同尺度范围内的方差来估计分形维数。
首先,将原始数据按照一系列长度为r 的间隔进行划分,并计算每个间隔内数据值之差的平方和作为方差。
然后,对所有间隔长度r对应的方差进行统计处理,得到一个关于尺度r的函数D(r)。
最后,通过对D(r)进行线性回归拟合或使用其他方法来估计数据集的分形维数。
2.3 数据预处理在应用结构函数法计算分形维数之前,需要对原始数据进行预处理。
分形编码

12
5.6.4 分形编码的特点
• 通过用数据量极小的系数代替数据量较大的实际像素值而将图像表示 成压缩形式。 • 目前采用全自动的分形压缩,对灰度图像一般可以达到4:1~100:1,对 彩色图像压缩比还可以更高些。
• 压缩时间较慢,而解压缩时间极快。
– 用户常常关心的是解压缩时间,因而分形压缩的这种不对称性对使用数 据的用户是很有用的。
– 将定义域块和值域块显示在计算机屏幕上,利用人机对话的方式, 对定义域块进行仿射变换,调整变换系数以产生不同的仿射图像。
2015-6-12
– 在最佳状态,该仿射图像应能覆盖值域块的一部分。这个结果得 到相应的最佳仿射变换系数,即所需要的LIFS。
10
5.6.3 分形压缩的步骤
(4)对LIFS代码进行编码
2015-6-12
4
5.6.2 分形压缩的基本方法
• 分形压缩的基本原理是利用分形几何中的自相似性原理来 进行图像何 一小部分的形状都与较大部分的形状极其相似。
• 分形用于图像编码,总的来说可以分为两大类。
• 一类可称作模型图像压缩编码,即事先对一类景物建立分 形模型。编码时针对具体事物提取必要的分形参数,编码 传送,实现压缩; • 另一类可称为IFS分形图像压缩编码,即利用迭代,得到原 始图像的一个近似。后一种实现方法简单,应用较为广泛。
– 分形编码(fractal coding)
– 自适应网格编码(self-adaptive mesh coding)
2015-6-12
2
5.6.1 分形 (fractal) 的基本概念
• 与经典的编码方法相比,分形编码在思路上有新的突破, 其压缩比高出一般编码方法2~3个数量级。
– 压缩过程时间长但解压缩速度快的特点将使其在大数据量、高质 量的多媒体应用、高速网络等场合中发挥重要的角色。
分形维数 matlab

分形维数 matlab分形维数是度量分形特征的重要方法。
它是通过对分形对象进行测量来确定对象的尺寸和形状复杂性的。
在matlab中,可以使用多种方法来计算分形维数。
本文将介绍matlab中计算分形维数的方法,包括盒维数、哈斯特指数和多重分形维数。
一、盒维数法盒维数法是最基本的计算分形维数的方法之一。
它通过测量覆盖分形对象所需的最小正方形数来计算分形维数。
具体计算方法为:1.将分形对象放置在一个正方形网格中。
2.选取一个长度为l的正方形框,将其移动滑动网格,去覆盖分形对象。
3.计算分形对象被框覆盖的次数,这就是盒维数的结果。
在matlab中,可以使用下面的代码计算盒维数:% 定义分形对象x = linspace(-1, 1, 100);y = x.^2;% 计算盒维数D = boxcount(x, y);disp(['盒维数:' num2str(D)]);二、哈斯特指数法1.将信号分解成一系列尺度不同的信号,即小波系数。
2.计算每个尺度下的信号的自相关函数。
% 定义信号load noisysignals.mat;[~, ~, H] = haursd(signal);三、多重分形维数法多重分形维数法是一种区间分析法,它通过对分形对象进行分割,分析分割后各段的分形特征来计算分形维数。
具体计算方法为:1.将分形对象分割为多个区间,求出每个区间的分形特征,如盒维数或哈斯特指数。
2.根据分形特征和区间的尺寸关系,计算每个区间的分形维数。
3.通过对所有区间的分形维数作图,得到分形维数的分布情况。
plot(q, fDq, 'r-');xlabel('q');title('多重分形维数');。
分型维数 python

分型维数 python
分型维数是描述分形图形复杂程度的一个指标。
它可以用来衡量图形的紊乱程度,或者说是表达出图形的自相似性。
在本文中,我们将介绍如何使用 Python 来计算分型维数。
首先,我们将学习如何生成分形图形,然后使用盒计数法和 Haussdorf 维数法来计算分型维数。
我们还将探讨如何在 Python 中可视化分形图形和计算分型维数,以及如何使用分型维数来比较不同的分形图形。
最后,我们将介绍一些在分形分析和计算机图形学领域中常用的 Python 库,以帮助读者更深入地了解分形维数的计算和分形图形的生成。
- 1 -。
python 立方体覆盖法 求三维分形维数
python 立方体覆盖法求三维分形维数立方体覆盖法是一种用于计算三维分形维数(Fractal Dimension)的方法之一。
分形维数用于描述不规则几何形状的复杂程度。
立方体覆盖法通常涉及将立方体逐渐缩小并计算所需的立方体数量。
下面是一个简单的Python代码示例,用于实现立方体覆盖法,并计算三维分形维数:```pythonimport numpy as npdef cube_counting(dimension, iterations):total_cubes = 0for i in range(iterations):total_cubes += 2 ** (dimension * i)return total_cubesdef fractal_dimension(iterations):dimensions = np.arange(1, iterations + 1)cube_counts = [cube_counting(d, iterations) for d in dimensions] slope, _ = np.polyfit(np.log(1 / dimensions),np.log(cube_counts), 1)return -slope# 设置迭代次数iterations = 10# 计算分形维数fractal_dim = fractal_dimension(iterations)# 打印结果print(f"迭代次数: {iterations}")print(f"三维分形维数: {fractal_dim}")```在这个例子中,`cube_counting`函数计算每个维度的立方体数量,然后`fractal_dimension`函数计算分形维数。
通过增加迭代次数,你可以获得更准确的估计。
请注意,立方体覆盖法是众多计算分形维数的方法之一,具体的选择可能取决于你所处理的特定问题。
分形维数算法

分形维数算法分形包括规则分形和无规则分形两种。
规则分形是指可以由简单的迭代或者是按一定规律所生成的分形,如Cantor集,Koch曲线,Sierpinski海绵等。
这些分形图形具有严格的自相似性。
无规则分形是指不光滑的,随机生成的分形,如蜿蜒曲折的海岸线,变换无穷的布朗运动轨迹等。
这类曲线的自相似性是近似的或统计意义上的,这种自相似性只存于标度不变区域。
对于规则分形,其自相似性、标度不变性理论上是无限的(观测尺度可以趋于无限小)。
不管我们怎样缩小(或放大)尺度(标度)去观察图形,其组成部分和原来的图形没有区别,也就是说它具有无限的膨胀和收缩对称性。
因些对于这类分形,其计算方法比较简单,可以用缩小测量尺度的或者不断放大图形而得到。
分形维数D=lnN(λ)/ln(1/λ) (2-20)如Cantor集,分数维D=ln2/ln3=0.631;Koch曲线分数维D=ln4/ln3=1.262; Sierpinski海绵分数维D=ln20/ln3=2.777。
对于不规则分形,它只具有统计意义下的自相似性。
不规则分形种类繁多,它可以是离散的点集、粗糙曲线、多枝权的二维图形、粗糙曲面、以至三维的点集和多枝权的三维图形,下面介绍一些常用的测定方法[26]。
(1)尺码法用某个选定尺码沿曲线以分规方式测量,保持尺码分规两端的落点始终在曲线上。
不断改变尺码λ,得到一系列长度N(λ),λ越小、N越大。
如果作lnN~lnλ图后得到斜率为负的直线,这表明存在如下的幂函数关系N~λ-D(2-21)上式也就是Mandelbrot在《分形:形状、机遇与维数》专著中引用的Richardson公式。
Richardson是根据挪威、澳大利亚、南非、德国、不列颠西部、葡萄牙的海岸线丈量结果得出此公式的,使用的测量长度单位一般在1公里到4公里之间。
海岸线绝对长度L被表示为:L=Nλ~λ1-D(2-22)他得到挪威东南部海岸线的分维D ≈1.52,而不列颠西部海岸线的分维D ≈1.3。
分形维数代码
分形维数代码A=imread('e:\1.jpg')FF=size(A)% 计算灰度矩阵的大小;for i=1:FF(1)for j=1:FF(2)if A(i,j)==0 % 等多种运算是不支持“0”值的;endendendimwrite(A,’e:\2.jpg)’;% 重新保存经校正后灰度矩阵;A=imread('e:\2.jpg');% 读入图像,并转化为矩阵t=graythresh(A);% 计算二值化阈值B=im2bw(A,t);% 输出图像的二值化矩阵% image(B);[x,y]=size(B);% 图像尺寸u=1;V=nonzeros(B);Area=sum(V)/(x*y);for side_length=2:110% 定义观测尺度,即正方形(盒子)边长Hang=mod(x,side_length);Lie=mod(y,side_length);C=B(1:x-Hang,1:y-Lie);% 若图像大小“x×y”不能被正方形%“side_length ×side_length”整除,则舍去多余的“边幅”部分;[m,n]=size(C);X=reshape(C,side_length, numel(C)/side_length);interim1=sum(X);Y=reshape(interim1,side_length,numel(interim1)/side_lengt h);interim2=sum(Y);Number=numel(nonzeros(interim2));% 计数有像素(“1”)的盒子数interim=sum(interim2');%当盒子边长为side_length时,统计出各个% 盒子内的“1”值之和“interim2”,以及所有盒子“1”值总和“interim”,W(u,1)= Number;u=u+1;endy=log(W);x=log(2:110);plot(x,y,'o');Dbox=polyfit(x',y,1)% 线性方程斜率的绝对值即为盒子维数B=nonzeros(B);Area % 给出像素的占有率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A=imread('e:\1.jpg')
FF=size(A)
% 计算灰度矩阵的大小;
for i=1:FF(1)
for j=1:FF(2)
if A(i,j)==0 % 等多种运算是不支持“0”值的;
end
end
end
imwrite(A,’e:\2.jpg)’;
% 重新保存经校正后灰度矩阵;
A=imread('e:\2.jpg');
% 读入图像,并转化为矩阵
t=graythresh(A);
% 计算二值化阈值
B=im2bw(A,t);
% 输出图像的二值化矩阵
% image(B);
[x,y]=size(B);
% 图像尺寸
u=1;
V=nonzeros(B);
Area=sum(V)/(x*y);
for side_length=2:110
% 定义观测尺度,即正方形(盒子)边长
Hang=mod(x,side_length);
Lie=mod(y,side_length);
C=B(1:x-Hang,1:y-Lie);
% 若图像大小“x×y”不能被正方形
%“side_length ×side_length”整除,则舍去多余的“边幅”部分;[m,n]=size(C);
X=reshape(C,side_length, numel(C)/side_length);
interim1=sum(X);
Y=reshape(interim1,side_length,numel(interim1)/side_length);
interim2=sum(Y);
Number=numel(nonzeros(interim2));
% 计数有像素(“1”)的盒子数
interim=sum(interim2');
%当盒子边长为side_length时,统计出各个
% 盒子内的“1”值之和“interim2”,以及所有盒子“1”值总和“interim”,W(u,1)= Number;
u=u+1;
end
y=log(W);
x=log(2:110);
plot(x,y,'o');
Dbox=polyfit(x',y,1)
% 线性方程斜率的绝对值即为盒子维数
B=nonzeros(B);
Area % 给出像素的占有率。