4键定位说明
四键情景面板说明

技术参数
功能说明
1
工作电压
3V一个纽扣电池
1
先进的Zigbee自动组网技术,随意添加、移除设备,系统扩展简单、灵活、方便
2
工作温度
-10~50℃
3
工作湿度
≤90%RH
5
三组触摸按键,可以通过主机随意设定每个按键对应的情景,设定完成后,按下按键将执行预设的情景控制动作;可设定的情景包括灯光、插座、安防、红外设备、窗帘、温度等情景,也可以是这些情景的组合,灵活方便
8
接收灵敏度
-97dBm
9
外形尺寸
86mm×86mm×10mm
10
安装方式
随意贴
11
按键个数
四个情景按键
6
造型小巧,携带方便
12
通讯距离
空旷150米
13
插座方式
电阻触屏2无需和主机人工对码,系调试简单4工作频段
2405MHz~2480MHz
3
本地控制:采用电阻触摸式开关技术,轻轻触摸面板按键即可进行情景控制操作
5
网络拓扑结构
网状(Mesh)
6
通信协议标准
IEEE 802.15.4
4
移动随意贴设计,可以放在床头,茶几上,也贴在窗户、墙壁上
7
调制方式
DSSS(O-QPSK)
SAMSON-3730-2、4调节阀定位器基本操作ppt课件
初始化后,在MAX、NOM 或MAN 模式下成功初始化后,定位器
将处于自动操作模式。
17
• 切换至手动操作模式
在代码0 上,按下旋钮按钮,出现AUtO 显示,代码0 闪烁。转动
旋钮按钮至显示屏上出现MAN。按下旋钮按钮切换至手动操作模式。
自动/手动切换是平滑无扰动的,切换后的手动操作操作点是自动操作
许,应该选择其它的初始化模式。
SUB 初始化模式用于在生产过程进行中更换阀门定位器。为此,可
用机械方法将控制阀固定某个确定的阀位,或借助气动方式,即使用外接
气动信号使控制阀动作到某一个确定阀位。此固定住的阀位能够确保生产
装置能够正常运行。
更换上的阀门定位器不要初始化,如果需要,使用代码36 对定位器
模式下最后时刻的给定值。此时阀位以%显示。
18
• 调整手动给定值
转动旋钮按钮至显示屏出现代码1。按一下旋钮按钮确定设置,
代码1 闪烁。当代码1 闪烁时,可通过转动旋钮按键将控制阀移动至需
要位置。继续转动直到阀门定位器输出压力变化和控制阀门开始反应。
若两分钟内未激活旋钮按键,则定位器将自动返回至手动模式下的代
3.1)上的横槽里。相应地调节反馈杆(1)。用两个固定螺钉将定位器拧紧
在弯板上。
7
• 装配到角行程执行器
8
1、将安装夹具(3)安装在有槽的执行器轴上或者适配器(5)上。
2、将连接轮(4)平面侧,面向执行器安装在连接夹具(3)上。参照图9 进
行调整,使在阀门关闭时的槽口位置与旋转方向相对应。
部,使阀门定位器能够运行的最小允许输入控制信号电流不能低于
3.8mADC。
CNC中文使用说明

一. NC《INTERMAC MASTER EDGE 》的简介1 NC的开机方式A 将开机磁碟插入NC 电脑控制箱的软驱中B 打开电源 [此时电脑会检测机器各个控制件的功能]C 待画面现示白底红框的INTERMACL软体简介,拉起电脑及NC的EMERSENCYSTOP,就是急停。
按指示键头的按键及绿色CONTROLON按键,此时灯不会亮。
D 待画面现示NC要作萤幕时,按CONTEOLON此时绿色灯亮,表示进入NC。
E 工作F18主轴清零[待绩]否则机器无法动作。
2 电脑控制箱按键功能说明A CONTROLON电脑控制箱控制电源进入CN [若跳机绿色灯熄灭]B EMERGENCYSTOP 急停。
C FEED 刀具进刀速度[以用百分比表示,]D SPEED 主轴转速,[以用百分比表示]E MODE 控制型式,MDI 半自动-----X1000 Y-2000 轴依设定值移动M6T3取得号刀具M6T0将刀具放回刀座M7轴心水开启 M13轴心水关闭M8外圆水开启M9外圆水关闭M3S7000主轴正转7000RPMM4S500主轴逆转500RPMM5主轴停止 [同M3 M4]M19 主轴垂直定位并自动锁定[以上操作方式将自动转成半自动下才能用,以键盘输入按键盘右下方绿色START按键,则开始动作,按STOP 键为停止,按左方灰色RESFT按键为解除程式。
]AUTO 全自动---F18 F20 F21 F22 F23 F24 F25MANU 手动---以方向键盘选取欲移动的轴,黑色转换选择正向和负向,按绿色START 按键开始启动。
MANJ 寸动----与手动一样但是可能设定移动距离,1 。
利用JOG转钮最大数值为10MM往下减2 。
利用KEIN-JOG=40设定移动距离为40X 。
Y。
Z 轴移动方向选择转钮---位于MODE下方标示正负方向KEYBOARD:右方三个红绿灰的使用说明:红色为程式停止按键,按一次停止,再按一次恢复运行。
AUTOID 9 与AUTOID9HC系列说明
快速入门指南安装使用产品前请先阅读本指南,并请保留备用欢迎使用AUTOID 9/9HC系列目录第一章使用须知 (1)1.1 激光扫描引擎之注意事项 (1)1.2 安全注意事项 (1)1.3 维护注意事项 (1)第二章外观介绍 (2)第三章键盘 (4)第四章快速使用 (7)4.1 初次使用 (7)4.2 开机 (7)4.3 关机 (7)4.4 重启 (7)4.5 安装SIM卡 (7)4.6 安装SD卡 (8)4.7 安装电池 (8)4.8 拆卸电池 (10)第五章关于充电 (12)5.1 充电时间 (12)5.2 充电温度 (12)5.3 电池供电 (12)5.4 使用电池的注意事项 (12)5.5 LED指示灯 (13)第六章主屏幕 (14)6.1 状态栏图标 (14)第七章设置 (16)7.1 WLAN (16)7.2 移动网络 (21)7.3 蓝牙 (26)7.4 流量使用情况 (29)7.5 更多 (29)7.5.1 飞行模式 (30)7.5.2 VPN (30)7.5.3 NFC (31)7.5.4 便携式热点 (31)7.6 禁止下拉菜单 (32)7.7 手套模式 (33)7.8 Fn键粘滞一次 (33)7.9 屏蔽虚拟键一 (33)7.10 屏蔽虚拟键二 (34)7.11 声音 (34)7.12 显示 (35)7.13 存储 (37)7.14 电池 (38)7.15 应用 (38)7.16 位置信息使用权 (39)7.17 安全 (40)7.18 语言和输入法 (40)7.19 备份和重置 (41)7.20 添加帐户 (42)7.21 日期和时间 (42)7.22 辅助功能 (43)7.23 开发者选项 (44)7.24 关于手机 (44)第八章典型应用介绍 (47)8.1 扫描工具 (47)8.2 APK自动导入 (51)8.3 OTA云升级 (53)8.4 移动管家 (55)8.5 热键设置 (60)8.6 快捷配置 (62)8.6.1 导入 (62)8.6.2 导出 (66)8.6.3 其他 (69)第九章故障排除 (72)第一章使用须知1.1 激光扫描引擎之注意事项激光辐射,用户请勿直视激光束。
muji电子钟四个按键说明书

muji电子钟四个按键说明书
一、电子钟功能介绍
可调整运行的电子钟具有三种工作状态:“P.”状态、运行状态、调整状态。
(1)、“P.”状态,依靠上电或者复位键进入,在此状态下,按B、C、D键均无效,按A键有效,进入运行状态;
(2)、运行状态,按奇数次A键进入,在此状态下,按B、C、D键均无效,只有按A键有效,按下A键后,退出运行状态,进入调整状态;
(3)、调整状态,按偶数次A键进入,在此状态下,按B、C、D键均有效,如按下A键,则推出调整状态,进入运行状态;B、C、D分别为调时、分、秒,分别使之加1;调整后,按A键退出调整状态。
二、实现时钟计时的基本方法
(1)计数初值计算:
把定时器设为工作方式1,定时时间为50ms,则计数溢出20次即得时钟计时最小单位秒。
假设使用T/CO,方式1,50ms定时,fosc=12MHz。
则初值X满足us us MHz X 5000012*12
1
*
)2(16=-H CB X***15536→→=
(2)采用中断方式进行溢出次数累计,计满20次为秒计时(1秒);(3)从秒到分和从分到时是通过累计加和数值比较实现。
三、电子钟的时间显示
电子钟的时钟时间在六位数码管上显示,因此,在内部RAM中设置显示缓冲区共8个单元。
四、电子钟的启、停及时间调整
电子钟设置4个按键,通过程序控制来完成电子钟的启、停及时间调整。
A键控制电子钟的启、停;
B键调整时;
B键调整分;
B键调整秒。
点读机NE260操作说明书v2.1

● 避免在高磁、高温、高湿度下使用和存放存储卡,不要将 存储卡置于高温或直射阳光下,肯要避开静电、磁场。
● 当存储卡中的数据置满后,应尽快将存储卡中的数据转存 到电脑或其它存储介质上,以减少由于存储卡损坏而造成数据 丢失的风险。由于用户使用不当(如误格式化、静电冲击)或 读卡器、TF卡质量问题导致的数据丢失,本公司不承担由此 引起的责任。
5 点读笔操作方法
为了使点击效果最佳,请用点触笔如下图所示正确方法“垂
直”点击。若偏斜或不正确点击都有可能造成内容发音不准确。
正确点击方式如下图:
错误点击方式如下图:
6 更换个性相框
点读机外壳上有个性照片相框,小朋友们可以把自己的相片装 在机器外壳的个性相框内,为我们的机器装扮一份属于自己的特色! (也可以放入我们随机配送的相片哟!)
2 外接电源适配器
将USB线的一端接上充电器,然后 将充电器接到外接电源上,另一端插到点 读机的USB插口中。
3 插点读笔操作
将点读笔的一端接到点读机的点读笔 插孔中,接好后机器点读笔才可以使用。 在我们平时不用时,可以将点读笔放入点 读机背面的点读笔笔槽中。
--
盖好电池盖
4 书本定位
如果我们的课本是胶装课本请将胶装部分落在机器凹槽内,并压平 课本。骑马钉课本则需将装钉线对齐凹槽中间的位置,请注意书本要靠 下边放置,如下图所示:
六 常见故障排除........................ 43
七 技术规格............................ 44
八 售后服务............................ 44
九 环保使用说明........................ 45
TZID 型智能定位器操作说明书
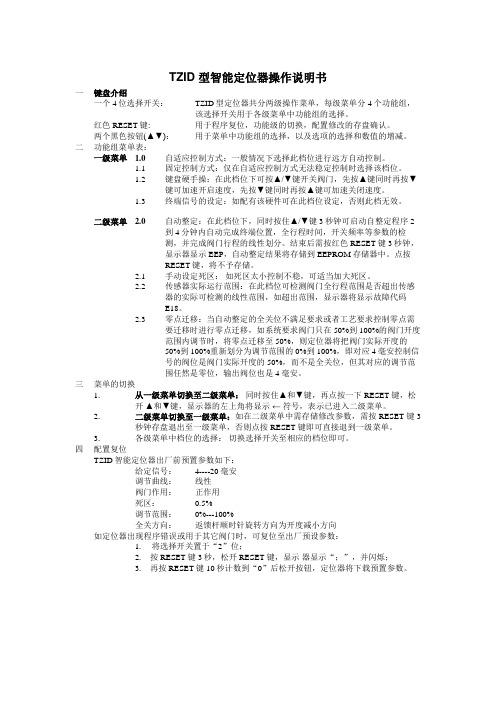
TZID 型智能定位器操作说明书一键盘介绍一个4位选择开关:TZID型定位器共分两级操作菜单,每级菜单分4个功能组,该选择开关用于各级菜单中功能组的选择。
红色RESET键: 用于程序复位,功能级的切换,配置修改的存盘确认。
两个黑色按钮(▲▼):用于菜单中功能组的选择,以及选项的选择和数值的增减。
二功能组菜单表:一级菜单 1.0自适应控制方式:一般情况下选择此档位进行远方自动控制。
1.1固定控制方式:仅在自适应控制方式无法稳定控制时选择该档位。
1.2键盘硬手操:在此档位下可按▲/▼键开关阀门,先按▲键同时再按▼键可加速开启速度,先按▼键同时再按▲键可加速关闭速度。
1.3终端信号的设定:如配有该硬件可在此档位设定,否则此档无效。
二级菜单 2.0自动整定:在此档位下,同时按住▲/▼键3秒钟可启动自整定程序 2到4分钟内自动完成终端位置,全行程时间,开关频率等参数的检测,并完成阀门行程的线性划分。
结束后需按红色RESET键3秒钟,显示器显示EEP,自动整定结果将存储到EEPROM存储器中。
点按RESET键,将不予存储。
2.1手动设定死区:如死区太小控制不稳,可适当加大死区。
2.2传感器实际运行范围:在此档位可检测阀门全行程范围是否超出传感器的实际可检测的线性范围,如超出范围,显示器将显示故障代码E18。
2.3零点迁移:当自动整定的全关位不满足要求或者工艺要求控制零点需要迁移时进行零点迁移,如系统要求阀门只在50%到100%的阀门开度范围内调节时,将零点迁移至50%,则定位器将把阀门实际开度的50%到100%重新划分为调节范围的0%到100%,即对应4毫安控制信号的阀位是阀门实际开度的50%,而不是全关位,但其对应的调节范围任然是零位,输出阀位也是4毫安。
三菜单的切换1. 从一级菜单切换至二级菜单:同时按住▲和▼键,再点按一下RESET键,松开▲和▼键,显示器的左上角将显示←符号,表示已进入二级菜单。
2. 二级菜单切换至一级菜单:如在二级菜单中需存储修改参数,需按RESET 键 3秒钟存盘退出至一级菜单,否则点按RESET键即可直接退到一级菜单。
TVZ3100卫星校时钟说明书(新)

尊敬的用户:感谢您使用青岛市广播电视科学研究所生产的TVZ3100型卫星校时钟在安装调试前,请先阅读本说明书,当您遇到问题时请随时与我们联系——青岛市广播电视科学研究所地址:青岛市宁夏路200号邮编:266071电话/传真:+86-532-57017705701709http:\\E-mail:hinac@1青岛市广播电视科学研究所一.产品简介TVZ3100型卫星校时钟是青岛市广播电视科研所在GPS 时码接收的基础上推出的。
全球定位系统(GPS)是美国军方的半开放(中开放AC码)的一全球性网络系统,它由24颗具有星载原子钟的半同步轨道卫星组成,UTC定时精度优于1微秒。
二.产品特点※全自动工作。
※具有软件判断功能,直观指示信号搜索、跟踪和失锁等状态,并依此控制输出信号是否开通。
※具备SZ、RS232、RS422、EBU等格式的输出接口,以及标准六响报时输出,可校准各种具有标准时间接口的广播电视设备和电信、地铁、航空等行业的通讯电子设备。
※具有1PPS信号输出,可同步其它时钟系统。
三.性能指标◇初始跟踪时间:在足够的信噪比下,不长于3分钟◇定时精度:1μs2青岛市广播电视科学研究所◇SZ码输出57位,串行BCD反码◇EBU码输出引脚1、2,平衡式◇RS232输出接口类型:单向输出,3脚数据,5脚地;数据格式:4800bps,8位数据,一个停止位,无奇偶校验,每秒发送一次,共9个字,依次是同步字(16进制AA)、00、年、月、日、星期、时、分、秒。
其中年、月、日、星期、时、分、秒为BCD码◇RS422输出接口类型:单向输出,3脚正信号,8脚负信号,1脚地;数据格式:同RS232◇报时输出接口类型:卡侬座2、3脚信号,1脚地,前5响800Hz,最后1响1600Hz,整点前5秒开始一秒一报◇天线馈线长度:标配为50米◇功耗:10W(220V)◇整机重量:6.5Kg◇机箱尺寸:440×370×44㎜。
电动阀门智能定位器模块使用说明书概要

电动阀门智能定位器模块使用说明书天津通诺科技一、面板说明1、按键功能说明1〕A/M键:手/自动模式切换;手动模式下按2秒进入标定模式、标定模式下标定结果的存储和确认等;2〕▲键:手动模式下控制电机正转;标定模式下做累加键使用;3〕▼键:手动模式下控制电机反转;标定模式下做递减键使用;自动模式下按2秒进入初始化模式2、液晶显示说明〔参考表1〕〔1〕手动模式下,显示阀门相应开度,显示范围不受~的限制;〔2〕自动模式下,正常状态显示当前阀门开度,显示范围不受~的限制;〔3〕标定模式下,各显示具体含义见标定功能说明;3、状态LED显示说明1〕OPEN:电动执行器控制输出电路“开〞输出有效;2〕SHUT:电动执行器控制输出电路“闭〞输出有效;二、性能参数1、控制精度:0.1%~1.0%〔可设置〕2、工作功耗:<10W3、工作电压:交流100~240V,交流24V4、电动执行器反响电位器:500欧姆~10K欧姆15、输入信号:4~20mA,0-10V,1-5V6、输入阻抗:250欧姆7、输出信号:4~20mA,0-10V,1-5V8、输出信号负载:≤ 450欧姆9、环境温度:-20°C~70°C10、环境湿度:≤80%RH11、三、关于一键标定的说明1、在自开工作状态下,按下▲键4秒钟,自动进入自动标定状态。
2、进入自动标定后,电机将自动转到最小转角位置,进行最小转角标定。
延时5秒钟后,电机自动转到最大转角位置,进行最大转角标定。
3、自动标定结束后,自动回到正常工作状态,电机将自动转到标定前的位置。
2三、标定操作在手动状态下,按住A/M键5秒进入参数标定状态按A/M键按▼键显示方向标定〞进入标定.〞按A/M键按A/M键最终确认相位按▼键显示电机自动标定〞开始自动标定〞按A/M键按A/M键按▼键显示电机手动标定进入关阀标定按A/M键按A/M键,存储关阀位置按▼键显示电机手动标定按A/M键显示无信号设定按A/M键显示精度设定按A/M键退出标定状态,回复到正常运行状态按▼键正反相切换按A/M键标定结束按▲,▼键调关阀位置按▲,▼键调开阀位置按▼键三无种信位号置模切式换按A/M键按▼键改变精度按A/M键31、标定模式进入:手动模式下,按 A/M键并保持2秒,将进入标定模式;2、相位标定:〔1〕显示当前实际相位设置,如是正相模式那么显示“电机正向〞,反相模式那么显示“电机反向〞,等待按键输入,按下A/M 键将跳过本标定进程,直接进行到步骤〔4〕,按下▼键将进入本标定进程,进入步骤〔2〕;2〕当前实际相位的前面将显示一个星号,按下▼键将进行正反模式的切换。
FISHER定位器调试说明书

FISHER(HART协议)定位器调试操作说明书一、1、定位器接线:(4—20mA信号、475手操器HART协议信号)接LOOP(+、‐)端子,如下图所示:2、定位器调试前必须查看磁条装配位置、是否碰到定位器,哈弗指针是否对准行程牌。
如下图所示:二、定位器修改位号和快速校验步骤:下图手操器界面说明:Power:电源Backlight:灯光Page up、Page down:上下翻页键Delete:下一级菜单键Back Space:返回键Fn+Backlight:手操器重启组合键1、2.。
9:为按钮键Tab:制表符1、按电源键打开475手操器,按Enter键点击HART图标后将进入下一步,如下图所示:2、按下键选择Online(使手操器处于在线模式)图标后按右键进入下一步,如下图所示:3、按下键选择Configure(配置)图标后按右键进入下一步,如下图所示:4、按下键选择Manual Setup(手动设置、相当于参数设置)图标后按右键进入下一步,如下图所示:5、按下键选择lnstrument(设备)图标后按右键进入下一步,如下图所示:(这一步是更改位号)6、按下键选择ldentification(识别)图标后按右键进入下一步,如下图所示:7、根据指示单位号进行修改,修改完成后按ENTER键,如下图所示:8、修改完HART Tag(位号)后,HART Tag(位号)图标前会出现*型标记,这时按SEND 键进行发送保存位号,如下图所示:9、修改完位号后,按左键返回到Manual Setup(手动设置、相当于参数设置)图标下,然后按下键到Calibration(校验)图标下后按右键进入下一步,如下图所示:(这一步开始快速整定定位器)10、选择Travel Calibration(行程校验)图标后按右键进入下一步,如下图所示:11、按下键选择Auto Calibration(自动校验)图标后按右键进入下一步,如下图所示:12、更改定位器模式(In Service(投用模式)、Out of Service(非投用模式)),按下键选择Out of Service(非投用模式),然后按ENTER键,进入下一步,如下图所示:定位器整定过程中,模式必须更改为Out of Service(非投用模式)手操器上显示的这句话意思:(警告:当模式更改为Out of Service(非投用模式)时,定位器的输出将不受输入信号控制)13、选择Continue(继续)图标后按ENTER键进入下一步,如下图所示:手操器上显示的这句话意思:(警告:设备的输出在校验过程中将发生改变)14、定位器开始整定(寻找阀门行程最高点、最低点、中间点、定位器开始模块运算和优化)如下图所示:15、自动校验完成后按OK键,然后把定位器模式改回In Service(投用模式),如下图所示:整定完成后必须把模式更改回In Service(投用模式),不然中控给定输入信号后,阀门将不动作。
卡西欧四键W300G手表说明书中文 教程

卡西欧四键W300G手表说明书中文教程
卡西欧四键W300G手表说明书中文教程:
1、按2点钟方向按钮开始计时。
2、再按此钮即停止计时。
3、按4点钟方向按钮可归零。
码表间断计时
1、按2点钟方向按钮开始计时。
2、按4点钟方向按钮可暂停计时。
3、继续计时可再按下该钮。
4、按2点钟方向按钮则停止计时。
5、按4点钟方向按钮可归零。
计时码表指针(此项功能调校,
适用于码表计时的指针归零后,若仍无法回归定位,方才适用) A、调校1/10秒针:将表冠拉出一段,(长/短)时间,
按2点钟方向按钮可(快/慢)调整1/10秒针,调校完毕,按下表冠即可。
B、调校码表秒针:将表冠拉出一段,(长/短)时间,
按2点钟方向按钮可(快/慢)调整码表秒针,调校完毕,按下表冠即可。
C、调校码表分针:将表冠拉出两段,(长/短)时间,
按2点钟方向按钮可(快/慢)调整码表分针,调校完毕,按下表冠即可。
[管理]“全局”快捷键
![[管理]“全局”快捷键](https://img.taocdn.com/s3/m/31e3e207fd4ffe4733687e21af45b307e871f9f1.png)
“全局”快捷键下列快捷组合键可用于集成开发环境(IDE) 中的不同位置。
命令名快捷键说明编辑.复制CTRL + CCTRL + INSERT将当前选定的项复制到系统剪贴板。
编辑.剪切CTRL + XSHIFT + DELETE将当前选定的项移除到系统剪贴板。
编辑.循环应用剪贴板中的复制项CTRL + SHIFT + INSCTRL + SHIFT + V 将项从“工具箱”的“剪贴板循环”选项卡粘贴在文件中的插入点,并自动选择粘贴的项。
可通过重复按这些快捷键来查看剪贴板上的每个项。
编辑.转到下一个位置F8 将光标移动到下一项,如“任务列表”窗口中的任务或“查找结果”窗口中的搜索匹配项。
每按一次F8 键,就移动到列表中的下一个项。
编辑.转到上一个位置SHIFT + F8 在“任务列表”窗口或“查找结果”窗口中,将光标移动到上一项。
编辑.转到引用SHIFT + F12 显示代码中所选内容的引用。
编辑.打开文件CTRL + SHIFT + G 显示“打开文件”对话框,在此可选择要打开的现有文件。
编辑.粘贴CTRL + V在插入点插入剪贴板的内容。
SHIFT + INSERT还原上次撤消的操作。
编辑.重复CTRL + SHIFT + ZCTRL + YSHIFT + ALT + BACKSPACE编辑.取消选定ESC 关闭菜单或对话框,取消正在进行的操作,或将焦点放在当前文档窗口中。
仅在 .NET Framework 设计器中可用。
撤消上一编辑操作。
编辑.撤消ALT + BACKSPACECTRL + Z文件.打印CTRL + P 显示“打印”对话框,可在其中选择打印机设置。
文件.全部保存CTRL + SHIFT + S 保存当前解决方案中的所有文档和外部文件项目中的任何文件。
文件.保存选定项CTRL + S 保存当前项目中的选定项。
工具.转到命令行CTRL + / 将插入符号放置在“标准”工具栏上的“查找/命令”框中。
GPS2022说明书

一 . 装置的用途及特点T-GPS2022电力系统同步时钟(以下简称T-GPS2022)利用GPS(全球定位系统)卫星发送的秒同步信号,向电力系统各种自动化装置提供精确的同步时间信号。
T-GPS2022主要可应用于以下几个方面:1)为电网自动化装置如故障录波器、事件计录仪、微机继电保护及安全自动装置、远动及微机监控系统等提供时间标记。
2)用于频率监视的标准时钟,即调度上通过工频钟与标准时间的差异来比较系统频率误差积累情况。
3)用于相位测量的同步时钟,采用T-GPS2022来同步采样脉冲,同步误差很小,可以保证相位测量的准确性。
4)用于故障测距,特别为研制双端行波测距的装置创造了条件。
5)用于继电保护试验,检验线路纵联保护( 高频相差保护装置)。
T-GPS2022主要有以下特点:1)时间精度高,达微秒级。
2)信号接收可靠性高,不受电站地域条件的限制。
3)可编程设定秒、分、时钟同步脉冲输出,并可经串行口输出时间信息,可方便地由各种自动化装置选用。
4)有IRIG-B正弦调制输出和IRIG-B直流偏置输出。
5)装置的所有信号输出均经光电隔离,抗干扰能力强。
6)装置具有多种串行信息输出与交互方式,以满足用户不同的信号利用要求。
7)架装式结构,“2U、19”标准机箱,安装使用方便。
8)按键控制,使用灵活。
二.技术指标1.环境条件1)工作温度: 0 ℃~ +40 ℃2)贮存温度: -40 ℃~ +50 ℃2.电气条件1)电源: 直流 190~260V交流 190~260V 47Hz~63Hz 2)功耗: 不大于 5W3.性能指标1)获得数据时间:--- 瞬时断电后重开机,≤20秒。
--- 位置未变,重开机,≤45秒。
--- 位置和时间变化重开机,≤90秒。
--- 本地第一次开机,≤90秒。
2)位置精度: ±0.1′3)时间精度: 1μs4)输出端口特性:< 30V--- 空接点C、E间外接电压: VCE--- 空接点C、E间允许电流: I< 50mACE4.串行接口RS232C输出和RS422/485输出,波特率 (1200、2400、4800、9600)可选。
1435 GEMU 定位器使用说明书A4完全版

—
默认
11实际X值
的变化方向
X的显示方报警功能
报警功能
两元输出
(警报1和警报2)
关
最小/最大
最小/最小
最大/最大
关
13警报1
警报1起始值
0.0…100
%
10.0
14警报2
警报2起始值
0.0…100
%
90.0
15错误功能
错误信号输出
错误
错误+非活动范围
错误+活动范围
框。
在显示面板下部的左边为当前的操作模式,在右边显示阀门的当前百分比设定
值。
菜单中的项目“B:MANUAL”(手动模式)可通过按“→”键来实现。
8.2手动操作(B:MANUAL)
在手动操作模式下,可以手动调节阀门。期望的数值可通过“+”和“-”键
来设置。
按“→”键可以实现配置设置(C:CONFIG)
设定位置
最大位置
0.0…100
%
100
23关紧功能
在最小/最大位置的
关紧功能
没有
最小
最大
最小和最大
没有
24设定方向
设定值方向
正向
反向
正向
25设定坡度
设定值的坡度功能
自动
0…400
s
0
26拆分开始
拆分范围(设置值范
围)开始
0…100
%
0.0
27拆分结束
拆分范围(设置值范
围)结束
0…100
%
100
28设定函数
间切换。
●如果选择手动操作,则阀门可通过向上键(+)或向下键(-)进行人
GPS72使用说明
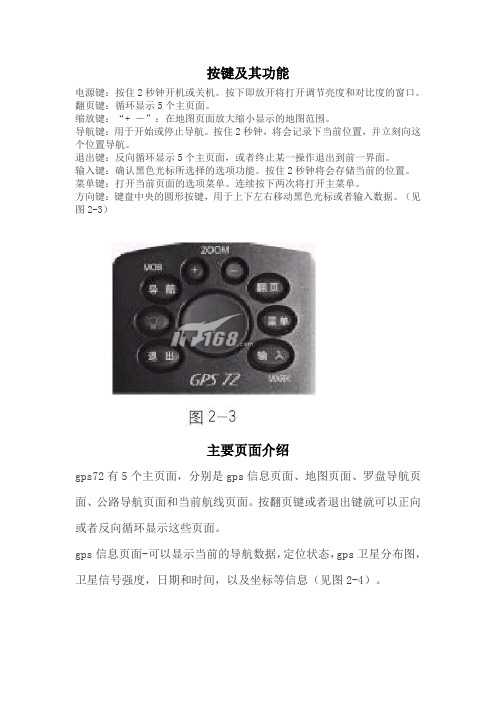
按键及其功能电源键:按住2秒钟开机或关机。
按下即放开将打开调节亮度和对比度的窗口。
翻页键:循环显示5个主页面。
缩放键:“+ -”:在地图页面放大缩小显示的地图范围。
导航键:用于开始或停止导航。
按住2秒钟,将会记录下当前位置,并立刻向这个位置导航。
退出键:反向循环显示5个主页面,或者终止某一操作退出到前一界面。
输入键:确认黑色光标所选择的选项功能。
按住2秒钟将会存储当前的位置。
菜单键:打开当前页面的选项菜单。
连续按下两次将打开主菜单。
方向键:键盘中央的圆形按键,用于上下左右移动黑色光标或者输入数据。
(见图2-3)主要页面介绍gps72有5个主页面,分别是gps信息页面、地图页面、罗盘导航页面、公路导航页面和当前航线页面。
按翻页键或者退出键就可以正向或者反向循环显示这些页面。
gps信息页面-可以显示当前的导航数据,定位状态,gps卫星分布图,卫星信号强度,日期和时间,以及坐标等信息(见图2-4)。
地图页面-可以显示导航数据,行走轨迹,保存的航点等信息,还进行测量距离的操作(见图2-5)。
罗盘导航页面-可以显示导航数据,定位状态,以罗盘的形式表示出当前的行进方向和目标方位等信息(见图2-6)。
公路导航页面-可以显示导航数据,定位状态,以公路的形式表示出当前的行进方向与目标的关系等信息(见图2-7)。
当前航线页面-可以显示当前正在使用其导航的航线名称,航线上的各个航点,以及它们之间的距离、时间等信息(见图2-8)。
除了上述5个主页面之外,连续两次按下菜单键将打开主菜单页面,主菜单页面中包括了旅行计算机、航点、航线、航迹等各种信息,以及接收机的各种设置(见图2-9)。
任何一个页面,都有关于此页面的选项菜单,其中包括了本页面的选项、设置或功能等内容,只要按下菜单键就可以显示当前页面的选项菜单了。
某些选项或设置又分为几个子页面,您可以左右按动方向键在这些子页面之间进行切换。
如果您在这些子页面中迷了路,按下翻页键就可以直接返回到主页面了。
电动阀门智能定位器使用说明书概要

电动阀门智能定位器使用说明书Intelligent Electric Valve Locator Instruction Manual一、简介Introduction二、面板说明Panel Description1、按键功能说明The Key Function Description(1)A/M键:A/M KeyA.手/自动模式切换;Manual/Auto mode switchingB.手动模式下按2秒进入标定模式、In Manual mode, press it for 2 seconds to enter calibration modeC.标定模式下标定结果的存储和确认等;In calibration mode the verification and storage of the calibration results and soon(2)▲键:▲KeyA.手动模式下控制电机正转;In Manual mode control the motor forwardB.标定模式下做累加键使用;In calibration mode as the use of cumulative(3)▼键:▼KeyA.手动模式下控制电机反转;In Manual mode control the motor reversalB.标定模式下做递减键使用;In calibration mode as the use of decreaseC.自动模式下按2秒进入初始化模式In Auto mode, press it for 2 seconds to enter the initialization mode2、数码管显示说明(参考表1)LED display description (Table 1)(1)手动模式下,显示阀门相应开度,显示范围不受0.00~100.0的限制;In Manual mode, display the corresponding valve opening, the display range is notlimited from 0.00 to100.0(2)自动模式下,正常状态显示当前阀门开度,显示范围不受0.00~100.0的限制;In Auto mode, display the current valve opening, the display range is not limitedfrom 0.00 to100.0(3)标定模式下,各显示具体含义见标定功能说明;In calibration mode the specific meaning refer to the function description.3、状态LED显示说明Status LED display description(1)OPEN:电动执行器控制输出电路“开”输出有效;Electric actuator control output circuit “opening” output is effective (2)SHUT:电动执行器控制输出电路“闭”输出有效;Electric actuator control output circuit “closing” output is effective (3)MANU:定位器处于手动模式;Locator is in manual mode(4)AUTO:定位器处于自动模式;Locator is in Auto mode4、用户标定LED显示说明User calibration LED display description(1)DRTA:正相标定,即4mA对应阀门全闭,20mA对应阀门全开;Normal phase calibration, 4mA corresponds to the valve fully closed, 20mAcorresponds to the valve fully open(2)RVSA:反相标定,即4mA对应阀门全开,20mA对应阀门全闭;RP Calibration, 4mA corresponds to the valve fully closed, 20mAcorresponds to the valve fully open(3)OPEN:无输入信号时,阀门自动调至全开;No input signal, the valve automatically transferred to full open (4)STOP:无输入信号时,阀门自动停在当前位置;No input signal, the valve automatically stops at the current location (5)SHUT:无输入信号时,阀门自动调至全闭;No input signal, the valve automatically transferred to full closed.三、性能参数( Performance parameters)1、控制精度:0.1%~1.0% (可设置)Control precision: 0.1% ~ 1.0% (can be set)2、工作功耗:<10WWorking Power3、工作电压:交流100~240VOperating Voltage: AC 100 ~ 240V4、电动执行器反馈电位器:500欧姆~10K欧姆Electric actuator feedback potentiometer5、输入信号:4~20mAInput signal6、输入阻抗:250欧姆Input impedance7、输出信号:4~20mAOutput signal8、输出信号负载:≤450欧姆Output Load9、环境温度:-20 °C~70 °CThe ambient temperature10、环境湿度:≤80%RHThe ambient humidity四、接线说明(wiring instructions)五、标定操作(calibration operation)1、标定模式进入:手动模式下,按A/M键并保持2秒,将进入标定模式;Enter the calibration mode: in manual mode, press A / M key and keep 2 seconds, will enter the calibration mode2、相位标定:Phase calibration:(1)显示当前实际相位设置,如是正相模式则显示“F1-2”,反相模式则显示“F1-1”,相应标定LED也会被点亮。
Arctime常用快捷键有哪些?Arctime键盘快捷键汇总
Arctime常⽤快捷键有哪些?Arctime键盘快捷键汇总Arctime剪辑媒体⽂件的时候,想要使⽤快捷键操作,有哪些会计按键呢?下⾯我们就来看看windows和mac稍微有点区别,但是差异不⼤,详细请看下⽂介绍。
键盘快捷键操作在Arctime的时间轴⾯板中,通过快捷键可以提⾼⼯作效率。
由于时间轴⾯板是软件中最重要的模块,所以⽀持的操作也是最多的,这么多快捷键可能⽐较难以⼀次性记清楚,但是通过⽇常使⽤的不断熟悉,就可以逐渐熟练使⽤。
绝⼤部分快捷键对应的功能,都可以在主界⾯菜单或其他⾯板中找到,所以即使记不住快捷键,也不会影响使⽤。
快捷键仅在时间轴⾯板有效,即时间轴⾯板显⽰⾼亮边框的时候,请务必切换到英⽂输⼊法⽅可正常使⽤快捷键时间轴⾯板中的快捷键Space(空格键):播放、暂停Enter(回车键):插⼊新字幕块(默认2秒时长,可以在选项⾯板修改)Shift+Enter组合键插⼊新字幕块,并使⽤⽂本区域的第⼀条符合条件的内容填充S键:开启/关闭吸附功能C键:切换到字幕块切割⼯具B键:切换到字幕绑定⼯具A或V键:切换到默认选择⼯具(若当前已是选择⼯具,按下A可选中播放头所在的字幕块)D键:切换到拖拽创建⼯具X键:切换到⽂字交换⼯具Q键:显⽰最近打开的⼯程Ctrl+1(Mac中是Cmd+1):打开语⾳转写⼯具Ctrl+2(Mac中是Cmd+2):打开单句语⾳识别⼯具Ctrl+3(Mac中是Cmd+3):打开⾃动打轴⼯具M键:插⼊“普通标记”【,】键插⼊“开始标记”、【;】键插⼊“普通标记”、按【'】键插⼊“结束标记”1键:按住启⽤⽂字向前修剪模式,⿏标点击切分后,将切分点前的⽂字移到上⼀句话中2键:按住启⽤⽂字向后修剪模式,⿏标点击切分后,将切分点前的⽂字移到下⼀句话中1、2键的共同说明:完成⽂字修剪的同时,两句话的时间轴衔接点也会被设为当前播放头所在的位置;松开后返回选择⼯具3键:快速设定字幕块开始时间(操作对象为当前轨道中,播放头穿过或右侧第⼀个字幕块,⽆需选中字幕块)4键:快速设定字幕块结束时间(操作对象为当前轨道中,播放头穿过或左侧第⼀个字幕块,⽆需选中字幕块)T键:有两个作⽤作⽤1:快速设定两个字幕块衔接的时间点,例如操作AB两个字幕块,要求播放头处于A宽度的50%之后且在B宽度的50%之前作⽤2:⽤作拍打创建时间轴,当播放头右侧⽆字幕块时,按下T即刻设定左边字幕块的结束时间,同时在该位置创建⼀个新的字幕块J、K键拍打模式在视频播放时,单独按住J键或K键,可创建独⽴字幕块(按下确定开始时间,松开表⽰结束时间)JK键交替按住,可创建连续字幕块在“快速创建(D)”模式下,创建的字幕从⽂稿区域获取⽂字,其他模式下创建空⽩字幕块I/O键:设定内容的⼊点出点按住Alt键按I则是取消⼊点,按住Alt再按O则是取消出点Shift+I/O键:设定⼯程的⼊点出点按住Shift+Alt键按I则是取消⼊点,按住Shift+Alt再按O则是取消出点Ctrl+A组合键(Mac中是Cmd+A):全选所有字幕;Ctrl+Shift+A:选中当前轨道中所有字幕块Ctrl+Alt+A:选中所有空⽩字幕块Ctrl+S组合键(Mac中是Cmd+S):保存⼯程并刷新字幕默认⽣成ASS格式将同时⽣成Arctime⼯程⽂件(*.atpj格式,⽣成在与视频⽂件相同的位置)Shift+S组合键:保存当前时间点的视频截图Ctrl+N组合键(Mac中是Cmd+N):新建⼯程Ctrl+O组合键(Mac中是Cmd+O):打开⼯程Ctrl+I组合键(Mac中是Cmd+I):导⼊⾳视频⽂件;在已有⾳视频⽂件时,作⽤为替换⾳视频⽂件Ctrl+E组合键(Mac中是Cmd+E):导出字幕⽂件Ctrl+F组合键(Mac中是Cmd+F):查找字幕块Ctrl+R组合键(Mac中是Cmd+R):快速压制标准MP4;Ctrl+Shift+R:⾼级压制Ctrl+V组合键(Mac中是Cmd+V):⽤剪贴板中的⽂本在当前位置新建⼀个字幕块[键和 ]键:不播放时:跳转到上⼀个/下⼀个时间节点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绿 BD BC BB BA
黄 CD CC CB CA
【森林舞会】: 狮子 熊猫 猴子 兔子
此款产品针对12键和8键专用定位器所玩的机器
【水果类型】; 苹果 橘子 木瓜 铃铛 西瓜 双星 双七 大王
A键 B键 C键 D键 AA键 BB键 CC键 DD键
【车牌类型】: 奔驰 宝马 奥迪 捷达
3.有效干扰控制距离离机器5米之内
A B C D AA BB CC DD
【万能鲨鱼】:兔子 猴子 熊猫 狮子 老鹰 孔雀 鸽子 雀子
A B C D AA BB CC DD
金鲨银鲨的操作中银鲨按住产品的B键 按住5秒时间!
具体使用方法跟万能鲨鱼操作一样,如果想中鲨鱼,就按遥控器A号键按住5秒的时间
仪器优点:体积小,隐蔽性强,方便携带。
使用说明:
ห้องสมุดไป่ตู้
1.拿到仪器首先需要购买一节23A-12V电池(大型超市都有卖)
2.进入场地首先要按遥控器A键+B键对准主机的位置同时按住15秒~30秒
红 AD AC AB AA
绿 BD BC BB BA
黄 CD CC CB CA
【金鲨银鲨】:兔子 猴子 熊猫 狮子 老鹰 孔雀 鸽子 雀子
4键通用定位器是本公司最新,最尖端的产品。此仪器可针对:水果面版,车牌类型,动物系列的机子。
所玩机器的类型:【水果机系列】【奔驰宝马系列】【森林舞会系列】【飞禽走兽系类】等系列机器
本款产品有以下几个特点,操作简单,打法隐蔽,遥控机种多,中奖概率高,可以远程遥控各种机台,随心所欲。是各位机友出门打机必备的工具!初学者请详细阅读本说明书后再使用。
红 AD AC AB AA
绿 BD BC BB BA
黄 CD CC CB CA
【风云大鳄2】:鳄鱼 大象 老虎 熊猫