Bray阀门定位器操作说明
阀门定位器压电阀安全操作及保养规程

阀门定位器压电阀安全操作及保养规程阀门定位器压电阀是一款基于压电效应原理实现的阀门定位器,广泛应用于工业和生产领域。
为了保障使用者的安全和设备的正常运行,本文将介绍阀门定位器压电阀的安全操作及保养规程。
安全操作规程1. 可以进行操作人员的限制1.1 操作人员应当经过专业培训,具备相关的技术知识和操作技能,才能进行阀门定位器压电阀的使用。
1.2 编写操作手册,标明更换部件、维护等内容,对于不同型号的阀门定位器压电阀,由专业维修人员进行维修。
1.3 操作人员应当做好“五查”工作,即:查看设备的完好性、端子板接线是否松动,是否存在人为损坏,系统是否处于正常运行状态,以及是否有碰撞痕迹和过载。
1.4 操作前应检查保险链是否牢固固定,保险油是否充足,避免因操作不当造成设备短路、漏电等问题。
2. 操作中的安全注意事项2.1 确认阀门定位器压电阀是否通电,如未通电则不能进行操作。
2.2 操作人员应该佩戴绝缘手套和防护眼镜等安全设备,并禁止在操作设备时穿戴金属饰物,以及其他可能导致电流流过身体的任何物品。
2.3 在对阀门定位器压电阀进行操作时,应使用所配备的工具,禁止使用金属工具进行操作。
2.4 操作人员同事应时刻关注设备运行状态,确保设备的安全可靠。
3. 操作后的安全操作3.1 操作结束后,须断开电源,并按规定进行设备关机操作。
3.2 对于阀门定位器压电阀的维护和保养,应由专业人员进行操作。
3.3 在完成设备维护和保养后,应检查全部电气箱的门锁、插头、电路板、底座、阀门大小连接位置以及其他装置是否正确装好,不存在松动、破损现象,方可进行后续操作。
保养规程1. 日常保养1.1 对于阀门定位器压电阀设备的每一部分,应进行定期的检查和清理,保证设备的正常运行。
1.2 定期清洁空气过滤器,以保证供气的干燥清洁,防止油尘混入气路。
1.3 每天对阀门定位器压电阀进行维护,检查管道的连接情况,如果发现松动或漏气的情况,应立即修改。
阀门定位器.模块使用说明书

阀门定位器.模块使用说明书ZXQ 系列电动阀门智能定位器/阀门操作器(电子式伺服控制器)使用说明书DOC NO :201109ZXQ20 ZXQ20ZXQ20ZXQ20目录1一、概述 (2)二、主要技术指标 (2)三、定位器面板 (3)四、接线方式 (5)五、设定操作方法 (6)六、错误代码列表 (9)附录:其它标定操作(出厂后如需此项操作,请在厂家指导下使用) (9)如顾客所购买的是本公司Z型(机电一体)执行器,内部定位器无需对执行器转角标定,接线无误即可正常使用。
系列电动阀门智能定位器是以工业单片机为核心的智能信号采集控制系统,体积小巧,可选择安装在电动执行器的接线盒内或以DIN导轨方式固定在外,能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与电位器反馈的电动执行器配套对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC的执行器转角位置(或位移)反馈转换信号,可精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED灯可直接显示定位器模态,4位数码LED通过2按键切换显示阀位实际开度值、阀位设定开度值、定位器壳内温度,操作方便。
通过U4参数可调) ●可接电动执行器反馈信号:电位器500Ω~10KΩ●可接收外部控制信号(DC):4~20mA (1~5V、0~10V、开关量等出厂前定制)●输入阻抗:250Ω;●通过修改U1参数可设定:①DRTA/正动作,RVSA/逆动作模态②输入信号中断时“中断”模态—OPEN(开)、STOP(停)、SHUT(闭)●可选:可控硅输出(AC,1000V,25A)●输出执行器位置信号:低漂移输出4~20mADC对应执行器全闭至全开,信号完全与输入隔离(光电隔离),输出负载≤500Ω●环境温度:0~80℃,相对湿度:≤90%RH ●有超温保护功能: 定位器壳内温度≥70℃时,定位器停止对执行器的开闭控制●外形尺寸:ZXQ2003→77mm(底面长)×76mm(底面宽)×51mm(高/厚);ZXQ2004→74 mm(底面长)×57mm(底面宽)×45mm(高/厚)ZXQ2004B→119mm(底面长)×76mm(底面宽)×26mm(高/厚)ZXQ2004C→62mm(底面长)×48mm(底面宽)×26mm(高/厚)●可通过按键自由标定输入信号所对应执行器的动作区间(一般标定为电动执行器全闭、全开位置)●可设定最大阀位限制值与最小阀位限制值●密码锁,防止误操作●防执行器频繁启动功能●带故障报警代码指示功能(E-0X)3按输入信号和执行器转角位置进行智能步距调整精确定位■1■5■壳上的接线图连接好电动执行器和电源连线,注意连接时的极性,为减少电机干扰,应将电动执行器的电机控制线和反馈信号线分开走线;定位器的弱电信号线应尽量短些,若必须使用较长的连线时,应采用屏蔽信号线,外屏蔽与控制柜外壳妥善接地。
ABB 智能气动阀门 定位器操作手册
MS Windows 95 2M 500KB CD ROM RS232 C
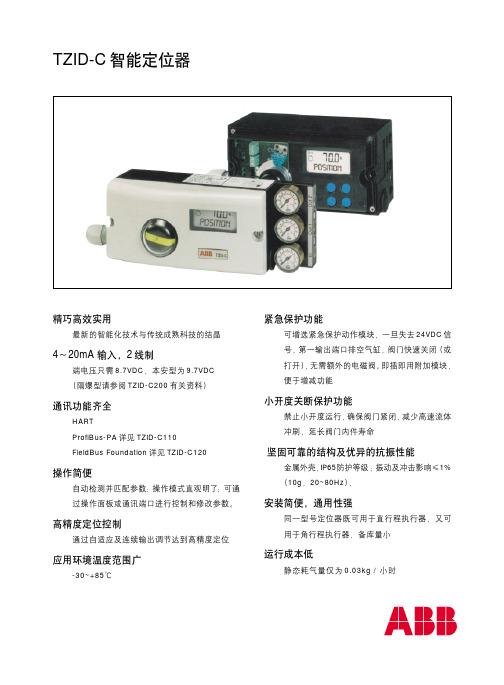
ABB TZID-C
!"#$%&'()*+ !"#$%&'( !"#$
!"#$%&'() !"#$%&'(
!"#$%&'() *+,
5.
Smart Vision
6
TZID-C
!"
10/18-0.22CN
!
! !"#$ 5µm ! 5mg/m 3 1mg/m3 !"#$% ! 10k ! 1.4~6bar(20~90psi) !"#$%&'()*+ !" <0.03kg / h !"#$%& !
x
!
/
! !" !" !
! ! IP65 !"#RAL9005 !"RAL9006 !" ! 2.5m 2 2 Pg13.5 NPT 1 / 2-14 M20x1.5 ! G1 / 4 1 / 4-18NPT ! 1.7kg ! !
7
TZID-C
பைடு நூலகம்
!"
10/18-0.22CN
!
!"#$%
! 4~20mA ! !" 1% !"#$%&' 4mA 20mA !"#$ ! 10~30V DC !"#$%&'($
1
!"#$%&'()*+,
!"#$ ! 0 ! 1 SJ2-SN (NC)
ABB阀门定位器中文说明书

TZID-C 智能定位器安装及操作说明书MOTOYAMA ENG. WORKS LTD本山製作所株式 会社气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
阀门定位装置说明书

一种阀门定位装置技术领域本实用新型涉及自控领域,特别是涉及阀门定位装置。
背景技术调节阀是大型企业选矿厂和化工厂设备必不可少的控制设备,由于生产工艺需求和产品质量指标要求,必须对几种不同的生产原材料配比进行严格控制,对液体原材料的控制主要靠调节阀来实现。
如果调节阀开度不精确,将会造成生产原材料配比失衡,原料浪费和终端产品质量不合格等一系列问题。
阀门定位器是调节阀的主要附件,通常与气动调节阀配套使用,它接受调节器的输出信号,然后以它的输出信号去控制气动调节阀,当调节阀动作后,阀杆的位移又通过机械装置(位置反馈盘)反馈到阀门定位器,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移倍与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
目前,大部分工厂使用的阀门定位器位置反馈盘是塑料材质,塑料在化工环境下被氧化易碎,而且位置反馈盘的两个部分(反馈盘A和反馈盘B)衔接的不好,导致调节阀定位不准,调节阀开度出现偏差。
发明内容本实用新型目的是提供新型阀门定位装置,克服塑料材质位置反馈盘的不足,更为可靠、更为实用,能精准调节流体流量。
为了实现上述目的,本实用新型的技术方案如下:一种阀门定位装置,主要包括反馈盘A和反馈盘B,采用不锈钢金属材质,按图注模型制作。
本实用新型具有如下优点:1、反馈盘A和反馈盘B之间衔接严密,定位精准。
2、不受环境影响,适用范围广,长期免维护。
3、反馈盘A反馈盘B之间距离可调,安装方便。
4、原材料简单,制作易成型。
本实用新型提供的一种阀门定位装置,通过实际使用证明,达到了预定目的,尤其适用于选矿厂和化工厂。
附图说明图1为本实用新型反馈盘A的结构示意图;图2为本实用新型反馈盘B的结构示意图;安装使用说明:在图1中,a为A盘固定安装孔,通过尺寸相符的螺丝固定在气动阀杆上,b为定位卡槽。
阀门定位器的详情介绍及操作规程
阀门定位器的详情介绍及操作规程阀门定位器的详情介绍阀门定位器按结构分:气动阀门定位器、电气阀门定位器及智能阀门定位器,是调整阀的紧要附件,通常与气动调整阀配套使用,它接受调整器的输出信号,然后以它的输出信号去掌控气动调整阀,当调整阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位情形通过电信号传给上位系统。
(一)结构阀门定位器按其结构形式和工作原理可以分成气动阀门定位器、电-气阀门定位器和智能式阀门定位器。
阀门定位器能够增大调整阀的输出功率,削减调整信号的传递滞后的情况发生,加快阀杆的移动速度,能够提高阀门的线性度,克服阀杆的摩擦力并除去不平衡力的影响,从而保证调整阀的正确定位。
(二)定位器分类1、阀门定位器按输入信号分为气动阀门定位器、电气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。
(2)电气阀门定位器的输入信号是标准电流或电压信号,例如,4~20mA电流信号或1~5V电压信号等,在电气阀门定位器内部将电信号转换为电磁力,然后输出气信号到拨动掌控阀。
(3)智能电气阀门定位器它将掌控室输出的电流信号转换成驱动调整阀的气信号,依据调整阀工作时阀杆摩擦力,抵消介质压力波动而产生的不平衡力,使阀门开度对应于掌控室输出的电流信号。
并且可以进行智能组态设置相应的参数,达到改善掌控阀性能的目的。
2、按动作的方向可分为单向阀门定位器和双向阀门定位器。
单向阀门定位器用于活塞式执行机构时,阀门定位器只有一个方向起作用,双向阀门定位器作用在活塞式执行机构气缸的两侧,在两个方向起作用。
3、按阀门定位器输出和输入信号的增益符号分为正作用阀门定位器和反作用阀门定位器。
正作用阀门定位器的输入信号加添时,输出信号也加添,因此,增益为正。
反作用阀门定位器的输入信号加添时,输出信号减小,因此,增益为负。
4、按阀门定位器输入信号是模拟信号或数字信号,可分为一般阀门定位器和现场总线电气阀门定位器。
阀门三位定位器 说明

阀门三位控制器说明本定位器可根据控制室的指令,控制阀门处在:关位置、中间某个位置(可任意设定)、开位置;为了方便现场调试,具有手动控制功能、模拟控制室指令进行现场调试的功能,同时具有断电自动保存最后一次指令功能。
还可对阀门设定的某个中间位置进行顺时和逆时的延时控制(出厂延时设定为3秒)。
输入、输出安排:◆电源:+24V、-GND◆电位器信号:P1、P2、P3◆输入信号:(来自控制室指令:低电平脉冲有效、GND为公共端)1、CLOSE(要求阀门关闭)2、MID(要求阀门处于中间位置)3、OPEN(要求阀门打开)(说明:系统以最后接收到的控制指令作相应动作)◆输出信号:(输出到控制室的状态信号:24V、GND为公共端)OUTC:阀门处在关闭位置OUTM:阀门处在中间位置OUTO:阀门处在打开位置◆电磁阀信号:(控制双电控电磁阀)1、关闭阀门信号(VC+、VC-)2、打开阀门信号(VO+、VO-)◆手动控制按键:(3个)1、调试按键:3个(手动控制功能/模拟控制室指令----根据SW1:ON/OFF区分功能)K_C:手动关闭阀门/ 要求阀门关闭;K_M:设置功能键/ 要求阀门处在中间位置;K_O:手动打开阀门/ 要求阀门打开;2、设置功能:K_M键(当SW1=ON时有用,用于设定关闭位置、中间位置、打开位置)操作步骤:(进入设置状态后,可通过K_C、K_O键手动调整阀门位置)a)长按K_M键,LED黄灯闪烁几下,此时,松开此按钮,系统进入设置状态;b)按K_C键使阀门处于关闭位置,短按一下K_M键,LED黄灯闪一下,进入下一设置状态;c)按K_C或K_O键使阀门处于需设定的中间位置,短按一下K_M键,LED黄灯闪一下,进入下一设置状态;d)按K_O键使阀门处于打开位置,短按一下K_M键,LED黄灯闪烁几下,设置完毕,将SW1拨到OFF位置,系统自动进入正常工作状态。
(若黄灯不断闪烁,则表示位置有重叠或电位器在盲区,需调整电位器起始位置后重新设定)◆LED灯:(3个)(根据SW1:ON/OFF 区分功能)1、LED_C(红灯):“关阀门电磁阀”线圈得电指示灯/ 阀门处在“关闭状态”指示灯2、LED_M(黄灯):设置时,设置过程状态指示灯/ 阀门处在“中间状态”指示灯3、LED_O(绿灯):“开阀门电磁阀”线圈得电指示灯/ 阀门处在“打开状态”指示灯◆跳线开关:(4位)1、SW1:ON/OFF-----手动设置功能/ (模拟)控制室指令2、SW2:ON/OFF--- --关闭阀门时延时/ 不延时(3秒)3、SW3:ON/OFF-----打开阀门时延时/ 不延时(3秒)4、SW4:ON/OFF----- 误差±3% / 误差±2%操作简要说明:1、SW1拨到ON位置,用3个按键进行先设定关闭位置、其次设定中间位置、最后打开位置的设定,确保设置准确;2、SW1拨到OFF位置,即可。
智能阀门定位器说明书

图 3.5.2.2.2
显示界面(见图3.5.2.2.2)。在未初始化状 态中,按 用于充气,按 用于放气。
2.参数设定、初始化状态 不论在未初始化状态界面,还是在正常运营界面,顾客只需同步按下:
+ + 三个键3秒钟就能够进入到参数设定和初始化状态。
3.正常运营状态 参数设定、初始化成功后,定位器系统自动进入运营状态。
6.调整阀门定位器位置,使阀门定位器到达最高点和最低点时,反馈连杆 摆动角度不超出允许范围。
7.阀门定位器旳进一步调整见3.5节“初始化及投入使用”。
3.3 电气连接
图3-2-2 安装图
阐明:在进行电气连接前确 保全部旳可选择模块已安 装好。
注意:在进行电气安装时, 请参见有关原则,尤其在 危险旳环境中更要根据危 险
智能阀门定位器阐明书
安全注意事项
1.智能阀门定位器简介
2.定位器旳构造
2.1 定位器旳单元构成
3.操作阐明
3.1 外型连接尺寸 3.2 安装 3.3 电气连接 3.4 气动连接 3.5 初始化及投入使用
4. 主要技术参数
5.维护注意事项
6.故障诊疗
返回
安全注意事项
在使用本定位器之前,请务必仔细阅读下面旳安全 注意事项。
2.执行器正/反作用设定。默以为正作用 设定措施与定位器类型设定相同。项号11为
正作用/反作用设定界面。按功能+向上键,系 统退出执行器正/反作用设定,进入阀门气开气 关设定界面。按功能 +向下键 进入10号菜单。 下列全部菜单旳转化以此类推,不再反复阐明。
正作用表达4—20mA相应于0—100%行程。 反作用表达4—20mA相应于100—0%行程。
单作用定位器压力测量模块涉及两个压力表,能够显示输入、输出 气体旳压力。
阀门定位器.模块使用说明书

ZXQ系列电动阀门智能定位器/阀门操作器(电子式伺服控制器)使用说明书DOC NO:201109ZXQ2003ZXQ2004BZXQ2004ZXQ2004C目录一、概述 (2)二、主要技术指标 (2)三、定位器面板 (3)四、接线方式 (5)五、设定操作方法 (6)六、错误代码列表 (9)附录:其它标定操作(出厂后如需此项操作,请在厂家指导下使用) (9)如顾客所购买的是本公司Z型(机电一体)执行器,部定位器无需对执行器转角标定,接线无误即可正常使用。
ZXQ系列电动阀门智能定位器是以工业单片机为核心的智能信号采集控制系统,体积小巧,可选择安装在电动执行器的接线盒或以DIN导轨方式固定在外,能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与电位器反馈的电动执行器配套对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC的执行器转角位置(或位移)反馈转换信号,可精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED灯可直接显示定位器模态,4位数码LED通过按键切换显示阀位实际开度值、阀位设定开度值、定位器壳温度,操作方便。
●控制精度:0.1%~3.0%(通过U4参数可调)●可接电动执行器反馈信号:电位器500Ω~10KΩ●可接收外部控制信号(DC):4~20mA (1~5V、0~10V、开关量等出厂前定制)●输入阻抗:250Ω;●通过修改U1参数可设定:①DRTA/正动作,RVSA/逆动作模态②输入信号中断时“中断”模态—OPEN(开)、STOP(停)、SHUT(闭) ●可选:可控硅输出(AC,1000V,25A)●输出执行器位置信号:低漂移输出4~20mA DC对应执行器全闭至全开,信号完全与输入隔离(光电隔离),输出负载≤500Ω●环境温度:0~80℃,相对湿度:≤90%RH●有超温保护功能: 定位器壳温度≥70℃时,定位器停止对执行器的开闭控制●外形尺寸:ZXQ2003→77mm(底面长)×76mm(底面宽)×51mm(高/厚);ZXQ2004→74 mm(底面长)×57mm(底面宽)×45mm(高/厚)ZXQ2004B→119mm(底面长)×76mm(底面宽)×26mm(高/厚)ZXQ2004C→62mm(底面长)×48mm(底面宽)×26mm(高/厚)●可通过按键自由标定输入信号所对应执行器的动作区间(一般标定为电动执行器全闭、全开位置)●可设定最大阀位限制值与最小阀位限制值●密码锁,防止误操作●防执行器频繁启动功能●带故障报警代码指示功能(E-0X)●按输入信号和执行器转角位置进行智能步距调整精确定位■参照下图定位器接线端子和定位器外壳上的接线图连接好电动执行器和电源连线,注意连接时的极性,为减少电机干扰,应将电动执行器的电机控制线和反馈信号线分开走线;定位器的弱电信号线应尽量短些,若必须使用较长的连线时,应采用屏蔽信号线,外屏蔽与控制柜外壳妥善接地。
bray气动阀门S90-91中文说明书

转动及供应的连接支架或套板。
BACK NEXT
系列90/91气动执行机构-双3 用于气动执行机构“开关” 的电动操纵。系列 63 电磁阀 采用 NEMUR 标准可直接安 装在执行机构上。防水型为: (NEMA 4,4X)防水防爆型(NEMA 4,4X,7,9)。空气接 管尺寸:1/4”NPT:电线连接;1/2”NPT。 手动现场操纵杆位于电磁阀之上。系列 55 速度控制阀可 以独立地控制执行机构开关的速度。3 通电磁阀,请与博 雷或代理商咨询。 气动定位器 系列 64 在需求调节阀门工况下采用 气动定位器系列 64 可准确地 指示阀门角度介于 0-90 度。 标准控制信号是(0.2)至(1.0) 巴(3-15psi)。它可用于双作用 或单作用弹簧复位气动执行机构上。 亦可用于需要有逆或分区范围。直接安装在执行机构。
的特点。它的主要优点 1) 节
接安装在博雷系列90/91 上部。
省空间和费用。与双方向操作
其特点包括“手指控制”凸轮、
执行机构的外壳长度相同。从双方向操作转变为弹簧复位
“防掉”式外壳螺丝、现场开度
十分简单,拆除端盖,加入弹簧组合即可使用 2) 弹簧组 指示器和两个电线入口。内部行程开关预先连接”接线终
2
醇缩醛导环
2
行程限制螺母
2 可调行程限制螺丝
2 行程限制 O形环
8
六角螺丝
2
活塞 O形环
2
端盖 O形环
1
上轴 O形环
1
下轴 O形环
2
防尘帽
1
开度指示
1
开度指示螺丝
*不包括在系列 90
标准材料 外壳:挤压铝,经氧化处理
防腐涂层 端盖:铸压铝,防腐热塑性
电动阀门智能定位器模块使用说明书概要

电动阀门智能定位器模块使用说明书天津通诺科技一、面板说明1、按键功能说明1〕A/M键:手/自动模式切换;手动模式下按2秒进入标定模式、标定模式下标定结果的存储和确认等;2〕▲键:手动模式下控制电机正转;标定模式下做累加键使用;3〕▼键:手动模式下控制电机反转;标定模式下做递减键使用;自动模式下按2秒进入初始化模式2、液晶显示说明〔参考表1〕〔1〕手动模式下,显示阀门相应开度,显示范围不受~的限制;〔2〕自动模式下,正常状态显示当前阀门开度,显示范围不受~的限制;〔3〕标定模式下,各显示具体含义见标定功能说明;3、状态LED显示说明1〕OPEN:电动执行器控制输出电路“开〞输出有效;2〕SHUT:电动执行器控制输出电路“闭〞输出有效;二、性能参数1、控制精度:0.1%~1.0%〔可设置〕2、工作功耗:<10W3、工作电压:交流100~240V,交流24V4、电动执行器反响电位器:500欧姆~10K欧姆15、输入信号:4~20mA,0-10V,1-5V6、输入阻抗:250欧姆7、输出信号:4~20mA,0-10V,1-5V8、输出信号负载:≤ 450欧姆9、环境温度:-20°C~70°C10、环境湿度:≤80%RH11、三、关于一键标定的说明1、在自开工作状态下,按下▲键4秒钟,自动进入自动标定状态。
2、进入自动标定后,电机将自动转到最小转角位置,进行最小转角标定。
延时5秒钟后,电机自动转到最大转角位置,进行最大转角标定。
3、自动标定结束后,自动回到正常工作状态,电机将自动转到标定前的位置。
2三、标定操作在手动状态下,按住A/M键5秒进入参数标定状态按A/M键按▼键显示方向标定〞进入标定.〞按A/M键按A/M键最终确认相位按▼键显示电机自动标定〞开始自动标定〞按A/M键按A/M键按▼键显示电机手动标定进入关阀标定按A/M键按A/M键,存储关阀位置按▼键显示电机手动标定按A/M键显示无信号设定按A/M键显示精度设定按A/M键退出标定状态,回复到正常运行状态按▼键正反相切换按A/M键标定结束按▲,▼键调关阀位置按▲,▼键调开阀位置按▼键三无种信位号置模切式换按A/M键按▼键改变精度按A/M键31、标定模式进入:手动模式下,按 A/M键并保持2秒,将进入标定模式;2、相位标定:〔1〕显示当前实际相位设置,如是正相模式那么显示“电机正向〞,反相模式那么显示“电机反向〞,等待按键输入,按下A/M 键将跳过本标定进程,直接进行到步骤〔4〕,按下▼键将进入本标定进程,进入步骤〔2〕;2〕当前实际相位的前面将显示一个星号,按下▼键将进行正反模式的切换。
ABB阀门定位器中文说明书

TZID-C 智能定位器安装及操作说明书MOTOYAMA ENG. WORKS LTD 本山製作所株式会社气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
阀门定位器.模块使用说明书

ZXQ系列电动阀门智能定位器/阀门操作器(电子式伺服控制器)使用说明书DOC NO : 201109(接线前请检查执行器在外部切换开关控制下能否在动作区域内工作, 有^/|\ 无异常现象,能否达到开度的零位与满位,确保限位开关能正常工作。
13 ______________________ J接线前请检查执行器中电位器有无强电,用万用表分别测量电位器三接线端子,确保电位器在执行器运转过程中的阻值变化正常,排除断点等[厶f 异常现象。
定位器与执行器间连线要一致,仔细检查两者端子的对应关系;特别注意定位器电源、输入信号与输出信号接线,切莫把电源接至弱电信号端, 同时用仪表测量控制输入信号在定位器接受信号范围内。
. 如与执行器配套使用,在严寒、酷热、高温的环境下开箱时,仪表应于现场存放3小时以上方可进行标定校验。
目录概述.......主要技术指标三、定位器面板................ ・・. ............ . (3)四、接线方式 (5)五、设定操作方法.......................... ・・・・6六、错误代码列表 (9)附录:其它标定操作(出厂后如需此项操作,请在厂家指导下使用) (9)如顾客所购买的是本公司Z型(机电一体)执行器,内部定位器无需对执行器转角标定,接线无误即可正常使用。
~、概述ZXQ系列电动阀门智能定位器是以工业单片机为核心的智能信号采集控制系统,体积小巧,可选择安装在电动执行器的接线盒内或以DIN导轨方式固定在外,能直接接收工业仪表或计算机等输出的4~20mA DC信号(其它输入信号类型可在出厂前定制),与电位器反馈的电动执行器配套对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC的执行器转角位置(或位移)反馈转换信号,可精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED灯可直接显示定位器模态,4位数码LED通过按键切换显示阀位实际开度值、阀位设定开度值、定位器壳内温度,操作方便。
Bray阀门定位器参数菜单

Ⅻ
⊥ l四
oVg z1
I△
〓 畔〓 ~〓
°
露 亠
⒈艹一
〓∝
巽I潞 屮璎妊唯 邛 卒弼 l刨 V人 雾乃 l∮ 脚伫难 彐 人磊 西隧叼维鲔 :煞 Ψ昝沮 γ _______ 狃 隧 !r猡 钐 瑕
刃国孕泐 VX∶ ::1弓 盯 l9W徨 蚱 彐 邕 Jl饪 刨 轾 埯 人 /夏 夕圭 ・ 蛋 串 鹚 矍 a尹 妻 吾 鐾ˇ 爸r 圣
r,∶
% % %
o01
o01
0・ ,
o01 o△
% % %
0z
ro
Jo
:犭
1o
珥剧 尉图 马囝
Iη ≤ J泊 ⊥ ・ 藁穸 扛 al/lL江 丬
9NIyv・ ε A∶ I△ △
′H
VA gC
a^彐 1z0 91Λ 彐 90 1
N彐
(θ
Co
%
o OI¨
9o`q"ˇ
° ° °
” ο
z 〓
d0h0
%
oˉ
009¨
△
g
〓
乙 ε NIg 9
oˉ
00¨ Crs¨
1ˉ
oo9¨ σ z¨ ,o o^0,ˉ σ 1¨ o ¨
Jˉ
o
eIOvJ90 doVJ ε o
1IOV=Iz0
L 引
耩 dn|∷
刂彐0
ii;I;l;:;∶
uMop
dn
d0|s
⊥ sd
g彐 1¨ g彐
1ˉ
1
嗨 鲁 ⊥诌垃薮 Vli吖 ⒕ 珊 o0冫
g° 【
o0'
o・ 00Ⅱ
电动阀门智能定位器使用说明书概要

电动阀门智能定位器使用说明书Intelligent Electric Valve Locator Instruction Manual一、简介Introduction二、面板说明Panel Description1、按键功能说明The Key Function Description(1)A/M键:A/M KeyA.手/自动模式切换;Manual/Auto mode switchingB.手动模式下按2秒进入标定模式、In Manual mode, press it for 2 seconds to enter calibration modeC.标定模式下标定结果的存储和确认等;In calibration mode the verification and storage of the calibration results and soon(2)▲键:▲KeyA.手动模式下控制电机正转;In Manual mode control the motor forwardB.标定模式下做累加键使用;In calibration mode as the use of cumulative(3)▼键:▼KeyA.手动模式下控制电机反转;In Manual mode control the motor reversalB.标定模式下做递减键使用;In calibration mode as the use of decreaseC.自动模式下按2秒进入初始化模式In Auto mode, press it for 2 seconds to enter the initialization mode2、数码管显示说明(参考表1)LED display description (Table 1)(1)手动模式下,显示阀门相应开度,显示范围不受0.00~100.0的限制;In Manual mode, display the corresponding valve opening, the display range is notlimited from 0.00 to100.0(2)自动模式下,正常状态显示当前阀门开度,显示范围不受0.00~100.0的限制;In Auto mode, display the current valve opening, the display range is not limitedfrom 0.00 to100.0(3)标定模式下,各显示具体含义见标定功能说明;In calibration mode the specific meaning refer to the function description.3、状态LED显示说明Status LED display description(1)OPEN:电动执行器控制输出电路“开”输出有效;Electric actuator control output circuit “opening” output is effective (2)SHUT:电动执行器控制输出电路“闭”输出有效;Electric actuator control output circuit “closing” output is effective (3)MANU:定位器处于手动模式;Locator is in manual mode(4)AUTO:定位器处于自动模式;Locator is in Auto mode4、用户标定LED显示说明User calibration LED display description(1)DRTA:正相标定,即4mA对应阀门全闭,20mA对应阀门全开;Normal phase calibration, 4mA corresponds to the valve fully closed, 20mAcorresponds to the valve fully open(2)RVSA:反相标定,即4mA对应阀门全开,20mA对应阀门全闭;RP Calibration, 4mA corresponds to the valve fully closed, 20mAcorresponds to the valve fully open(3)OPEN:无输入信号时,阀门自动调至全开;No input signal, the valve automatically transferred to full open (4)STOP:无输入信号时,阀门自动停在当前位置;No input signal, the valve automatically stops at the current location (5)SHUT:无输入信号时,阀门自动调至全闭;No input signal, the valve automatically transferred to full closed.三、性能参数( Performance parameters)1、控制精度:0.1%~1.0% (可设置)Control precision: 0.1% ~ 1.0% (can be set)2、工作功耗:<10WWorking Power3、工作电压:交流100~240VOperating Voltage: AC 100 ~ 240V4、电动执行器反馈电位器:500欧姆~10K欧姆Electric actuator feedback potentiometer5、输入信号:4~20mAInput signal6、输入阻抗:250欧姆Input impedance7、输出信号:4~20mAOutput signal8、输出信号负载:≤450欧姆Output Load9、环境温度:-20 °C~70 °CThe ambient temperature10、环境湿度:≤80%RHThe ambient humidity四、接线说明(wiring instructions)五、标定操作(calibration operation)1、标定模式进入:手动模式下,按A/M键并保持2秒,将进入标定模式;Enter the calibration mode: in manual mode, press A / M key and keep 2 seconds, will enter the calibration mode2、相位标定:Phase calibration:(1)显示当前实际相位设置,如是正相模式则显示“F1-2”,反相模式则显示“F1-1”,相应标定LED也会被点亮。
阀门定位器教程

- 18 -
804、805系列凸轮安装位置的确认 凸轮以刻线面( 4-L-A等 )与凸轮座O形密封圈方向一致为准。(图8)
- 19 -
[凸轮面的确定]要根据阀门 动作确定凸轮面的朝向,RA动 作随信号增加,阀杆逆时针转 动时用B面,DA动作随信号增 加,阀杆顺时针转动时用A面。 松开反馈杆的紧定螺钉。将使 用的凸轮面转向滚轮一侧(图 13),凸轮面朝向钢印的最后 一个字母。(例:4-L-A) (图14) [凸轮位置的调整] 凸轮面上刻有三条基准线,表 示特性、有效范围,当阀开度 为50%时,使滚轮对准中间一 条基准线,然后拧紧反馈杆的 紧定螺钉,走满阀的全行程, 确认滚轮在 二端基准线以 内。如超过基准线过多会产生 定位器的行程达不到规定值的 现象,此时应松开反馈杆紧定 螺钉,重新调整凸轮位置。
-9-
- 10 -
- 11 -
HEP电气阀门定位器是根据力平衡原理制作的,即图4所示。 从调节器来的信号的变化,调节阀产生的摩擦力、流体阻力、外 部干扰力、通过电磁组件产生的力矩同执行机构阀杆的位置变化 产生的反馈弹簧力平衡,调节执行机构内的压力,使输出信号与 阀开度一致。 下面以压力增加阀杆上升的反作用执行机构为例叙述定位器 的工作原理:阀处于平衡状态的时候,由于输入信号的增加,挡 板向喷嘴靠拢,喷嘴背压上升,继动器输出直接增加,送到执行 机构气室内,从而改变了阀开度。这个变化通过反馈杠杆、行程 调节件、反馈弹簧进行传递形成负反馈与电磁力相对应。从而使 执行机构位置与输入信号相对应。喷嘴挡板被推到平衡位置。
- 14 -
KOSO阀门定位器EP800系列
输入阻抗 : 气源压力 : 25℃时250Ω±5% 140~700 kPa 输出特性 : 气源接口 : 线性 Rc 1/4 电气接口 : G 1/2
ABB阀门定位器使用手册

ABB阀门定位器使用手册功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按↑+↓ 点击ENTER 等3秒3-0 MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P1._STANDARD 基本参数组P1.0_ACTUATOR 定位器安装方式LINEAR 线性、ROTARY 角行程P1.1_AUTO.ADJ 启动自动整定程序START 开始P1.2_TOL.BAND 设定偏差带0.8%-100%P1.3_DEADBAND 设定死区0.6%-100%P1.4_TEST 试验修改结果INACTIVE 不执行INACTIVEACTIVE 执行P1.5_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存同时按MODE+ENTER 点击↑选所要的参数组P2._SETPOINT 给定信号组P2.0_MIN_RGE 给定信号的最小值4-18.4mAP2.1_MAX_PRG 给定信号的最大值5.6-20mAP2.2_CHARACT 选择调节特性曲线LINEAR 线性LINEAREP 1/25 等百分比1/25 EP 1/50 等百分比1/50 EP 25/1 等百分比25/1 EP 50/1 等百分比50/1 USER DEF 用户定义P2.3_ACTION 设定阀门正反作用方式DIRECT 正作用DIRECTREVERSE 反作用P2.4_SHUT-OFF 设定阀门关度阈值0%_100% OFFP2.5_RAMP∧降低开向速度1-200、OFFP2.6_RAMP∨降低关向速度1-200、OFFP2.7_SHUT_ON 设定阀门开度阈值0%_100% OFFP2.8_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存P3._ACTUATOR 执行器特性组P3.0_MIN_RGE 调节曲线起始开度0%—100%P3.1_MAX_RGE 调节曲线终止开度0%—100%P3.2_ZERO_POS 选择调节特性曲线CTCLOCKW 逆时针CTCLOCKWCLOCKW 顺时针P3.3_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按MODE+ENTER 点击↑选所要的参数组MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P4._MESSAGE 信息组P4.0_TIME_OUT 定位超时1-200、OFFP4.1_POS_SW1 第一位置信号设置点0%—100%P4.2_POS_SW2 第二位置信号设置点0%—100%P4.3_SW1_ACTV 高于或低于第一位置信号时有效FALL_DEL 低切除FALL_DELEXCEED 高切除P4.4_SW2_ACTV 高于或低于第二位置信号时有效EXCEED 高切除EXCEEDFALL_DEL 低切除CANCEL 不保存P5._ALARMS 报警功能组P5.0 LEACKAGE 启动执行器汽缸泄漏报警INACTIVE 未使用INACTIVEACTIVE 使用P5.1 SP_RGE 启动给定信号超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.2 SENS_RGE 启动零点漂移报警INACTIVE 未使用INACTIVEACTIVE 使用P5.3 CTRLER 启动远方控制切换报警INACTIVE 未使用INACTIVEACTIVE 使用P5.4 TIME_OUT 启动定位超时报警INACTIVE 未使用INACTIVEACTIVE 使用P5.5 STRK_CTR 启动调节行程超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.6 TRAVEL 启动总行程超限报警INACTIVE 未使用INACTIVEACTIVE 使用P5.7 _EXIT 退出到运行操作级NV-SAVE 保存NV-SAVECANCEL 不保存P6._MAN_ADJ 手动调整P6.0_MIN_VR 手动设置阀门全关位置65%P6.1_MAX_VR 手动设置阀门全开位置65%P6.2_ACTAUTOR 选择执行器型式LINEAR 线性LINEARROTARY 角行程P6.3_SPRING_Y2 设定执行器弹簧伸长时定位器反馈杆旋转方向CLOCKW 逆时针CLOCKWCTCLOCKW 顺时针功能分类进入方式操作按键退出方式二级功能分组中文三级功能分组中文可选参数或设定范围中文缺省值设定值备注configuration level 同时按MODE+ENTER 点击↑选所要的参数组MODE +↑ PARAMETER "EXIT"选NV-SAVE /CANCEL 按ENTER 等3秒3--0P6._MAN_ADJ 手动调整P6.4_ADJ_MODE 选择自动调整所需检测项目FULL 全部FULLSTROKE 行程CTRL_PAR 控制参数ZERO_POS 零位LOCKED 锁定P6.5_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVE CANCEL 不保存P7._CTR_PAR 控制参数组P7.0_KP∧开方向比例系数调整1.0-400.0 16.5P7.1_KP∨关方向比例系数调整1.0-400.0 10P7.2_TV∧开方向积分时间调整10-800 164 223P7.3_TV∨关方向积分时间调整10-800 370 236P7.4_GOPULSE∧开脉冲宽度0-200P7.5_GOPULSE∨关脉冲宽度0-200P7.6_Y_OFF5∧开偏置0%-100%P7.7_Y_OFF5∨关偏置0%-100%P7.8_SENSITIV 设定灵敏度0.10%P7.9_TOL_BAND 设定偏差带0.80%P7.10_TEST 试验修改结果INACTIVE 不执行INACTIVEP7.11_EXIT 退出到运行操作级NV-SAVE 保存NV-SAVE CANCEL 不保存P8._ANLG_OUT 模拟信号输出P8.0_MIN_RGE 阀位起始点电流4-18.4mA P8.1_MAX_RGE 100%阀位电流值5.6-20mAP8.2_ACTION 阀位正反方向选择DIRECT 正作用DIRECT REVERSE 反作用P8.3_ALARM 报警HIGH_CUR 高电流HIGH_CUR 、LOW_CUR 低电流P8.4_TEST 测试NONE 、。