结构力学 第10章 (四川大学)解析
四川大学理论力学第10章第三课时

B
O
aC
C
aA
A
B
运动学关系:
aA = rB = aC rD = aC
m2g
FT2
FA FAN
解: (1) 以重物A为研究对象, 受力如图。
aA
A
m2aA= m2 g sin-FT2-FA FAN-m2 g cos = 0 FA= FAN f
FT1 O F'T2
(2) 以 B 为研究对象。由刚 体定轴转动微分方程可得
z'
C y'
y
m=∑mi
LO = rC×mvC + LCr
dLO drC dvC dLCr mvC rC m dt dt dt dt
=0
=∑Fie
=∑ri×Fie =∑(rC+ r'i)×Fie
dLCr r'i Fi e MC (Fi e ) dt
即质点系相对于质心的动量矩对时间的导数等于 作用于质点系的外力系对质心的主矩。上述结论 称为质点系相对于质心的动量矩定理。
LA=MA(mvC) +JC ω
圆轮既滚且滑,设基点为O,故
vO
• vO C •O
r
A
ω
vCO
vC= vO+ vCO
•
vCO = rω/2
vC = vO+(rω/2)
MA(mvC)=(3mrvO /2)+(3mr2ω/4)
又
JC= JO – mr2/4 LA =(JO+mr2/2)ω+3mrvO /2
解: 圆轮纯滚,瞬心为A,故有
vC •C vO •O ω r
A
结构力学教程——第10章 力法
系数和自由项 ➢ 梁、刚架:
ii
M i 2 ds
EI
Ai yi EI
ij
M i M j ds EI
Aj yi EI
iP
M i M P ds EI
➢ 桁架:
2
ii
Ni l EA
ij
Ni N jl EA
iP
Ni N Pl EA
知识点
10.3 超静定刚架和排架
1. 刚架
20kN/m
11
M12 EI
ds
FN21 EA
ds
y2
cos2
EI ds EA ds
1P
M1 M P EI
ds
M0y ds
EI
(4)求多余未知力,即水平推力FH
M0y
X1
FH
1P 11
y2 EI
EI ds
cos2
ds EA
ds
(5)内力计算
M M 0 FH y
FQ FQ0cos FHsin FN FQ0sin FHcos
1P 11X1 0
P
2P 0
P
0
a
11
2 2
1
1
1
P
a
N1
NP
(3)求系数
11
2
Ni l 2( EA
2)2 EA
2a 4 12 a EA
4a (1 EA
2)
1P
Ni N jl 1 Pa 2 EA EA
(
2 )( EA
2P)
2a 2Pa (1 EA
2)
(4)解方程
X1
1P
11
P 2
当结构框格数目为 f , 则 n=3f 。
结构力学 (10)

1 0 - 1 移动荷载和影响线的概念
1.移动荷载
方向、大小不变,作用位置变化的荷载称为移动荷载。最常见的移动荷 载有上面提到的吊车梁上行驶的吊车、桥梁上行驶的汽车等。移动荷载作用 下结构会发生振动,严格来说它是动荷载,应按动力学方法分析,但为了简 化计算通常按静荷载计算,动力效应通过冲击系数考虑。囚此本章只考虑移 动荷载在不同位置时对结构的影响,不考虑动力效应,即认为无论移动荷载 作用于结构的任何位置结构都是平衡的,可以按静力学方法分析。
10-1 移动荷载 和影响线 的概念
10-2 静力法作 静定梁影 响线
10-3 静力法作 结点荷载 作用下主 梁影响线
10-4 静力法作 静定析架 影响线
10-5 机动法作 静定梁影 响线
10-6 机动法作 连续梁影 响线
10-7 固定荷载作 用下利用影 响线求内力 和支座反力
10-8 确定最不 利荷载位 置
1 0 - 4 静力法作静定析架影响线
1 0 - 5 机动法作静定梁影响线
1 0 - 6 机动法作连续梁影响线
1 0 - 6 机动法作连续梁影响线
1 0 - 6 机动法作连续梁影响线
1 0 - 6 机动法作连续梁影响线
机动法作连续梁某量S影响线的步骤为:
1
解除与S对应的约束,代以正向S
2
2.简支梁弯矩影响线
1 0 - 2 静力法作静定梁影响线
1 0 - 2 静力法作静定梁影响线
1 0 - 2 静力法作静定梁影响线
1 0 - 2 静力法作静定梁影响线
3.简支梁剪力影响线
1 0 - 2 静力法作静定梁影响线
1 0 - 2 静力法作静定梁影响线
1 0 - 3 静力法作结点荷载作用下主梁影响线
结构力学6-10章练习题及答案解析

第六章 力法【练习题】6-1 是非题:1、判断下列结构的超静定次数。
(1)、 (2)、(a)(b)(3)、 (4)、(5)、 (6)、(7)、(a)(b)2、力法典型方程的实质是超静定结构的平衡条件。
3、超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
4、在温度变化、支座移动因素作用下,静定与超静定结构都有内力。
5、图a 结构,取图b 为力法基本结构,则其力法方程为δ111X c =。
(a)(b)X 16、图a 结构,取图b 为力法基本结构,h 为截面高度,α为线膨胀系数,典型方程中∆12122t a t t l h =--()/()。
t 21t lA h (a)(b)X 17、图a 所示结构,取图b 为力法基本体系,其力法方程为。
(a)(b)16-2 用力法作图示结构的M 图。
3m m6-3 用力法作图示排架的M 图。
已知 A = 0.2m 2,I = 0.05m 4,弹性模量为E 0。
q6-4 用力法计算并作图示结构M 图。
EI =常数。
a a6-5 用力法计算并作图示结构的M 图。
ql /26-6 用力法计算并作图示结构的M 图。
q3 m4 m6-7 用力法计算图示结构并作出M 图。
E I 常数。
(采用右图基本结构。
)l 2/3l /3/3l /36-8 用力法计算图示结构并作M 图。
EI =常数。
3m3m6-9 用力法计算图示结构并作M 图。
EI =常数。
2m2m 2m2m6-10 用力法计算图示结构并作M 图。
EI =常数。
l lql l6-11 用力法计算并作图示结构M 图。
E I =常数。
6-12 用力法计算图示结构并作弯矩图。
161kN m m m m6-13 已知EI = 常数,用力法计算并作图示对称结构的M 图。
l l6-14 用力法计算并作图示结构的M 图。
EI =常数。
a a6-15 用力法作图示结构的 M 图 。
EI = 常数。
2q l6-16 用力法作M 图。
结构力学第10章动力学2
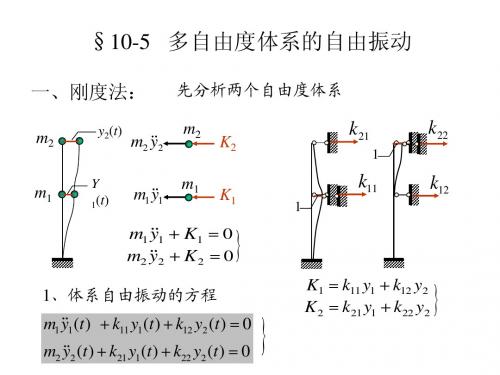
2、方程的解:
设解的形式: y1 (t ) = Y1 sin(ωt + α ) y2 (t ) = Y2 sin(ωt + α )
惯性力 − m1 &&1 (t ) = m1ω 2Y1 sin(ωt + α ) y 2 − m2 &&2 (t ) = m2ω Y2 sin(ωt + α ) y
k12 M kn2
L
k1n k2n M =0
k 22 − ω 2 m2 L
L k nn − ω 2 mn
n个ω 2的解对应n各ω:ω1 < ω2 < Lωn
ω1 − − − 第一频率或基本频率
3、振型
对应于ωi,其质点的振幅比值是常数,所以有n各振型: Y11 Y12 Y1n Y Y Y Y 1 = 21 ;Y 2 = 22 LY n = 2 n M M M Yn1 Yn 2 Ynn CY1i Y1i CY Y 2i 2i i i 则:CY = 若Y = L L Yni CYni 为方程(K − ω 2 M)Y = 0的解 也为方程的解
( K − ω12 M )Y 1 = 0 17.414Y11 − 5Y21 + 0 × Y31 = 0 − 5Y11 + 6.707Y21 − 3Y31 = 0 0 × Y11 − 3Y21 + 1.707Y31 = 0
令:Y31 = 1;求得: Y21 = 0.569;Y11 = 0.163 0.163 第一振型:Y 1 = 0.569 1
ω2 = (
1 k11 k 22 1 k k k k −k k + ) ± [ ( 11 + 22 )]2 − 11 22 12 21 2 m1 m2 2 m1 m2 m1m2
结构力学第十章总结
解:答案选A。
EI y 1 l 1.5 l 2 2EI x
中南大学
退出
返回
10:49
总
结
结构力学
例:矩阵位移法中,结构的原始刚度方程是表示下 列两组量值之间的相互关系:( ) A.杆端力与结点位移 C.结点力与结点位移 解:答案选C。 例:平面杆件结构用后处理法建立的原始刚度方程 组,( ) A.可求得全部结点位移 B.可求得可动结点的位移 B.杆端力与结点力 D.结点位移与杆端力
退出
返回
10:49
总
结
结构力学
对于支座位移等于给定值时,采用“乘大数法”。 设结点位移向量中第 r个位移等于d0,在矩阵K与向量P中, , 主对角元素krr 改为Gkrr,将Pr改为d0Gkrr,其中G为一 大数通常取108~1010 。
中南大学
退出
返回
10:49
总
结
结构力学
2. 先处理法 (1) 集成。将单元刚度矩阵先按边界条件进行处理 , 然后按照单元连接结点的总位移编号将单元刚度矩阵的 元素在结构的刚度矩阵中对号入座,形成总刚后即可进 行求解。上述过程可通过引入定位向量来实现。在单元 定位向量中考虑边界条件,凡给定的结点位移分量,其 位移总码均编为零,与总码编为零相应的行、列元素在 集成总刚时被屏弃在外。 单元定位向量:按单元连接结点编号顺序由结点未 知位移编号组成的向量。
中南大学
退出
返回
10:49
总
结
结构力学
表 8-1 一 般 位 移 法 矩 阵 位 移 法 1. 写出各杆的转角位移方程 1.列出各单元的单元刚度矩 阵和单元刚度方程 2.考虑结点和截面平衡建立 2.由各单元刚度矩阵装配总 位移法典型方程 刚度矩阵 3.解方程求结点位移 3.考虑约束条件建立结构刚 度方程并求解
结构力学第10章 结构的动力计算
F k
1
2 1 2
yst sin t
A yst
F F yst F 2 m k
动荷载幅值当作静载 作用时质体的位移
1
2 1 2
A yst
动力系数
§10-3
单自由度体系的强迫振动
动力系数的讨论
0, 1
荷载变化比较慢,可按静载处理。
解
对于竖向振动,柔度系数为
l3 48 EI
ml 3 T 2 m 2 48 EI
1 48 EI ml 3 m
§10-2
单自由度体系的自由振动
例题10-2 求图示悬臂杆的水平和竖向振动时的自振周期
解 (1)水平振动
当杆顶作用水平力W时,杆 顶的水平位移为
Wl 3 st 3EI
杜哈梅积分(Duhamel)
1 t y (t ) 0 FP sin t d m
零初始条件下,单自由度体系在任意荷载下的动位移公式
若 则
y0 0
v0 0 v0
1 y y0 cos t sin t m
t
0
FP ( ) sin t d
y t C1 sin t C2 cos t
F y t y t y * t C1 sin t C2 cos t sin t 2 2 m
§10-3
单自由度体系的强迫振动
代入初始条件
y 0 0 C2 0; F y 0 0 C1 m 2 2
(2)竖向振动
Wl 3 T 2 3EIg
当杆顶作用竖向力W时,杆顶的 竖向位移为
结构力学第十章
整体
分析
由变形条件和平衡条件 建立结点力与结点位移 间的刚度方程,形成整
用矩阵形式表示位
移法基本方程
体刚度矩阵
中南大学
退出
返回
03:45
§10-1 概述
四、基本概念
1. 结点和单元
结构力学
单元——最基本的分析部件,最简单的单元是等截面 直杆。 梁单元——受轴力、还受剪力和弯矩作用则称为梁单 元(梁、刚架)。 轴力单元——只受轴力作用的单元(桁架)。 单元与单元之间通过结点联结,结点一经确定,则单 元也就全部确定了。 构造结点:杆件的转折点、汇交点、支承点和截面突 变点。 非构造结点:一根等截面直杆内的单元与单元之间的 结点。
------ 整体分析
e
单元杆端力 结点外力 单元杆端位移
(杆端位移=结点位移) 结点外力 结点位移
中南大学
退出
返回
03:45
§10-2 单元刚度矩阵
结构力学
1. 建立单元杆端力与杆端位移之间的关系
截面直杆单元e , 其杆端位移列向量与杆端力列 向量分别为 T
{δ e } uie vie i e u je v je je e e e e {F e } Fxi Fyi M ie Fxj Fyj
对于杆系结构,矩阵位移法因易于编制通用的计算程序。
理论基础:位移法 ;分析工具:矩阵 ;
计算手段:计算机
中南大学
退出
返回
03:45
§10-1 概述
三、矩阵位移法的思路 :
结构力学
1)离散,进行单元分析,建立单元杆端力和杆端 位移的关系。 2)集合,进行整体分析,建立结点力与结点位移 的关系。 任务 意义
结构力学课后答案第10章结构动力学

10-34试说明用振型分解法求解多自由度体系动力响应的基本思想,这一方法是利用了振动体系的何种特性
10-35试用振型分解法计算题10-32。
解:
刚度矩阵 质量矩阵
其中
由刚度矩阵和质量矩阵可得:
则 应满足方程
其稳态响应为:
同理:
显然最大位移
10-36试用振型分解法计算题10-31结构作有阻尼强迫振动时,质量处的最大位移响应。已知阻尼比ξ1=ξ2=。
得振型方程:
)
,令
,由频率方程D=0
解得: ,
,
(c)
解:
图 图
(1) , ,
(2)振型方程
。
令 ,频率方程为:
(3)当 时,设
当 时,设
绘出振型图如下:
第一振型 第二振型
(d)
解:
#
图 图
频率方程为:
取 代入整理得:
其中
~
振型方程为:
将 代入(a)式中的第一个方程中,得:
绘出振型图如下:
第一振型 第二振型
\
解:
若 为静力荷载,弹簧中反力为 。
已知图示体系为静定结构,具有一个自由度。设为B点处顺时针方向转角 为坐标。建立动力方程:
则弹簧支座的最大动反力为 。
10-21设图a所示排架在横梁处受图b所示水平脉冲荷载作用,试求各柱所受的最大动剪力。已知EI=6×106Nm2,t1=,FP0=8×104N。
(a)
设 ,
;
使 ,则
(2)
设
如果使速度响应最大,则 最大,设 ,显然要求 最小。使: 得 。
(3)
令 显然要求 最小。
则 解的:
结构力学A下★第10章★10-3★单自由度体系的强迫振动

Forced-Vibration:强迫振动
强迫振动(受迫振动): 结构在动荷载作用下的振动。
无阻尼条件下,单自由度体系
y k
强迫振动方程:
m
P t P t m
my ky P t
k m
M max
1 1 ( FP )l 1.552 20 4 31.04kN .m 4 4
例:简支梁(I28b),惯性矩I=7480cm4,W=534cm3,E=2.1×104kN/cm2。 I22b 3570cm4 325
在跨度中点有电动机重量Q=35kN,转速n=500r/min。由于有偏心,转动时产 生离心力FP=10kN,FP的竖向分量为FPsinθt。忽略梁的质量, 试求强迫振动的动力系数和最大挠度和最大正应力。(梁长l=4m)
FP(t)=10sinθt
W
1m
1m
2m
1 ⑴ Natural Frequency 60.812 rad s m 3 l 48 EI 2n 2 500 ⑵ Force Frequency 52.36 rad s 60 60 1 ⑶ magnification factor 3.866 2 1
Ql Pl (Q P)l m ax 175.6MPa 4W 4W 4W 149.2 3 3 必须特别注意,这种处理方法只适用于单自由度体系在质 Ql Pl 对于本例,采用较小的截面的梁既可避免共振,又能获 max st y st 点上受干扰力作用的情况。对于干扰力不作用于质点的单自由 48EI 48EI 得较好的经济效益。 度体系,以及多自由度体系,均不能采用这一方法。
《结构力学》_龙驭球_第10章_动力学(4)解析

忽略阻尼影响时所得结果 能大不体能上 反映实际结构的振动规律。
忽略阻尼的振动规律
考虑阻尼的振动规律
结构的自振频率是结构的固有特性,与外因无关。
简谐荷载作用下有可能出现共振。
自由振动的振幅永不衰减。
自由振动的振幅逐渐衰减。
共振时的振幅趋于无穷大。
共振时的振幅较大但为有限值。
τ
d
t
t
可视为以 v0 = FP dt / m,y0= 0 为初始条件的自
由振动:
y
e-t
FP dt
mr
sin rt
③ 将荷载FP (t) 的加载过程 看作 一系列瞬时冲量:
dy
FP ( )d mr
e- (t - )
sin r (t
- )
④ 总反应
y(t)
t 0
FP ( )e-(t- ) mr
sin r (t
- )d
e -
t
y0
cos r t
v0
y0 r
sin r t
⑴ 突加荷载FP0
y(t)
FP 0
m 2
[1 -
e-t
(cos
r
t
-
r
sin
r
t
)]
ys
t
0π
具有阻尼的体系在 突加荷载作用下,最初 所引起的最大位移接近 于静位移 yst =FP0 / mω2 的两倍, 然后逐渐衰 减,最后停留在静力平 衡位置。
设 yk 和 yk+n 是相隔 n 个周期的两个振幅则:
1 ln yk 2n ykn
工程中常用此方法测定阻尼
一般钢混结构 0.05,钢结构 (0.02~0.03)。
结构力学 第10章 (四川大学)讲解

(3)采用集中质量法和广义坐标法都可使无限 自由度体系简化为有限自由度体系,它们所采用 的手法是不同的。 集中质量法:将结构的分布质量按一定规则集 中到结构的某个或某些位置上,认为其他地方没 有质量。质量集中后,结构杆件仍具有可变形性 质,称为“无重杆”。
10.2 单自由度体系运动方程的建立
研究单自由度的目的: 单自由度体系的动力分析虽然比较简单,但 非常重要。这是因为: (1) 很多实际的动力问题常可按单自由度 体系进行计算,或进行初步的估算。 (2)单自由度体系的动力分析是多自由度 体系动力分析的基础。
Fb cy
式中,c为体系的粘滞阻尼系数
( 3 )惯性力 FI :根据达朗伯原理,惯性 力是质量与加速度的乘积,但与加速度方 向相反。即 F m y
I
建立振动微分方程有两种基本方法: ( 1 ) 根据达朗伯原理 ( 动静法、惯性力 法)列出瞬时动力平衡方程,又称为刚度法 (列平衡方程)。 (2)另一种方程是列位移方程,又称为柔 度法。
cy ky 0 m y
研究单自由度体系自由振动的目的在于: 研究体系振动运动的基本特性,确定其固有特 性,以便进行结构的动力设计时加以控制及改 进结构的动力特性。
产生自由振动的原因只是由于在初始时刻的 干扰。初始的干扰有两种情况: (1)一种是由于体系具有初始位移; (2)另一种则是由于体系具有初始速度;或者 这两种初始干扰同时存在。
无限个自由度体系
图示为一块形基础,计算时可简化为一刚性块。 当考虑基础在平面内的振动时,体系共有三个自由度, 包括水平位移x、竖向位移y和角位移。当仅考虑基础 在竖直方向的振动时,则只有一个自由度。 自由度数与集中质量的个数并不一定彼此相等
自由度的数目不完全取决于质点的数 目,也与结构是否静定或超静定无关。
结构力学第10章矩阵位移法c
1 11 1 21
031
041
k
e 22
e1,2
k
2
32
042
对称
k
e
33
e2,3
k
3 43
加单元
e1,4
k
e 11
④
k
1 21
031
k
3 44
k
4 41
k
e 22
e 1, 2
k
2 32
042
对称
k
e 33
e2,3
k
3 43
k
e3,4
e 44
e1,4
k
e 11
k
1 21
M2 Y2
①2 1
X2
x
Y3
②
2 3
M3 X3
③
4 3
图10-6 例1题图
F1 FF32 F4
k k
1
11
1
21
0
0
k
1
12
k
1
22
k
2
22
k
2
32
0
0
k
2
23
k
2
33
k
3
33
k
3
43
0 1
0
k
3
34
k
ห้องสมุดไป่ตู้
3
44
32 4
通过互换行列后调整后的原始结构刚度方程为
F2 FF13 F4
对称u2 10
EA 0.35
l 1
0
1.35 0 0
1.35 0.35
1.35uvv323
结构力学 结构动力计算
⑶质点沿水平方向振动时,水平总线位移 Y yt
§10—2
运动方程为:
单自由度体系的自由振1 动
k
m
mY kY W 0
st
y(t)
Y(t)
因为 Y (t) st y(t) Y (t) y(t) -kY -mY
所以 my k[ y(t) st ] W
⑵阻尼力与质点速度平方成正比,固体在流体中运动受到的阻力。
⑶阻尼力与质点的速度无关,摩擦力属于此类。
§10—1 动力计算的特点和动力体系自由度
关于阻尼力的理论很多,为计算方便我们选用粘滞阻尼理论。
理论假定:阻尼力的大小与质点的运动速度成正比,方向与质 点的 运动速度方向相反。即:
R
cv
c
dy dt
w
又 k st kW W
my ky(t) W W
my ky(t) 0
§10—2 单自由度体系的自由振动
可见,重力对动位移y (t ) 的运动方程无影响。 质量围绕静力平衡位置进行振动。
aa
a a
W mymax
l m
ymax st a (W mymax)
st
a
ymax
Mmax (W mymax)l
§10—2 单自由度体系的自由振动
单自由度体系的动力分析虽简单但很重要体现在两个方面:
⑴很多实际动力学问题,可按单自由度体系进行分析和计算,而所 得结果基本上能反映其实际的动力特点。
⑵单自由度体系的动力分析是多自由度体系动力分析的基础。
一、振动模型的建立
对于各种单自由度体系的振动,都可以用一个弹簧质块模型的振动来描述, 因为它们有相同的运动规律和运动微分方程。
结构力学教案第10章影响线及其应用
结构⼒学教案第10章影响线及其应⽤第⼗章影响线及其应⽤10.1 影响线的概念⼀、移动荷载对结构的作⽤1、移动荷载对结构的动⼒作⽤:启动、刹车、机械振动等.2、由于荷载位置变化,⽽引起的结构各处的反⼒、内⼒、位移等各量值的变化及产⽣最⼤量值时的荷载位置。
⼆、解决移动荷载作⽤的途径1、利⽤以前的⽅法解决移动荷载对结构的作⽤时,难度较⼤。
例如吊车在吊车梁上移动时,R B 、M C2、影响线是研究移动荷载作⽤问题的⼯具。
根据叠加原理,⾸先研究⼀系列荷载中的⼀个,⽽且该荷载取为⽅向不变的单位荷载。
10.2 ⽤静⼒法绘制静定结构的影响线⼀、静⼒法把荷载P=1放在结构的任意位置,以x 表⽰该荷载⾄所选坐标原点的距离,由静⼒平衡⽅程求出所研究的量值与x 之间的关系(影响线⽅程)。
根据该关系作出影响线。
⼆、简⽀梁的影响线1、⽀座反⼒的影响线∑M B =0:∑M A =0:2、弯矩影响线1M C影响线弯矩图(1)当P=1作⽤在AC段时,研究CB:∑M C=0:(2)当P=1作⽤在CB段时,研究CB:∑M C=0:3、剪⼒影响线(1)当P=1作⽤在AC段时,研究CB:(2)当P=1作⽤在CB段时,研究CB:三、影响线与量布图的关系1、影响线:表⽰当单位荷载沿结构移动时,结构某指定截⾯某⼀量值的变化情况(分析左图)。
2、量布图(内⼒图或位移图):表⽰当荷载位置固定时,某量值在结构所有截⾯的分布情况(分析右图)。
四、伸臂梁的影响线例10?1 试作图10?4(a)所⽰外伸梁的反⼒R A、R B的影响线,C、D截⾯弯矩和剪⼒的影响线以及⽀座B截⾯的剪⼒影响线。
10.3 ⽤机动法作影响线⼀、基本原理机动法是以虚位移原理为依据把作影响线的问题转化为作位移图的⼏何问题。
⼆、优点不需要计算就能绘出影响线的轮廓。
以X 代替A ⽀座作⽤,结构仍能维持平衡。
使其发⽣虚位移,依虚位移原理: X ·δX +P · δP =0 X=-P δP /δX =-δP /δX 令δX =1,则 X=-δP 结论:为作某量值的影响线,只需将与该量值相应的联系去掉,并以未知量X 代替;)⽽后令所得的机构沿X的正⽅向发⽣单位位移,则由此所得的虚位移图即为所求量值的影响线。
第10章 力矩分配法

前面介绍的力法和位移法,是分析超静定结构的两种基本方法。
两种方法都要建立方程并解联立方程解联立方程直接解法渐近解法结构力学中的渐近法有两种应用方式。
•先从力学上建立方程组,然后从数学上对方程组采用渐近解法。
•不建立方程组,直接考虑结构的受力状态,从开始时的近似状态,逐步调整,最后收敛于真实状态。
力矩分配法属于位移法类型的渐近解法。
力矩分配法适用于连续梁和无结点线位移的刚架。
一、力矩分配法中使用的的几个名词(1) 转动刚度转动刚度表示杆端对转动的抵抗能力。
杆端的转动刚度以S表示,它在数值上等于使杆端产生单位转角时在转动端需要施加的力矩。
第一节力矩分配法的基本概念l EI A B 1l EI S AB /4=lEI S AB /3=A B 1A B 1lEI S AB /=A B 0=AB S (a)(b)(c)(d)远端固定,S =4i 远端简支,S =3i 远端滑动,S =i 远端自由,S =0(10-1)(10-2)(10-3)(10-4)图10-1给出了等截面杆件在A 端的转动刚度S AB 的数值。
1)在S AB 中,A 点是施力端,B 点称为远端。
当远端为不同支承地情况时,S AB 的数值也不同。
2)S AB 是指施力端A 在没有线位移的条件下的转动刚度。
在图10–1中,A 端画成铰支座,其目的是为了强调A 端只能转动、不能移动这个特点。
如果把A 端改成辊轴支座,则S AB 的数值不变。
也可以把A 端看作可转动(但不能移动)的刚结点。
这时S AB 就代表当刚结点产生单位转角时在杆端A 引起的杆端弯矩。
关于S AB 应当注意下列几点:3)式(10–1)到(10–3)可由位移法中的杆端弯矩公式导出。
式中lEI i(2) 分配系数图7–2a 所示为三杆AB 、AC 和AD 在刚结点A 连结在一起。
为了便于说明问题,设B 端为固定端,C 端为定向支座,D 端为铰支座。
设有力偶荷载M加于结点A ,使结点A产生转角 A ,然后达到平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、动力计算中体系的自由度
结构动力分析是以质点的位移为基 本未知量。
动力自由度定义为: 在振动过程的任一时刻,确定体系全 部质量位置所需的独立几何参数数目,称 为该体系的动力自由度。
集中质量法
由于实际结构的质量都是连续分布的,因此任何一 个实际结构都可以说具有无限个自由度体系。
将结构的分布质量按一定规则集中到结构的某个 或某些位置上,从而将无限自由度体系简化为有限自 由度体系。
(2) 取隔离体如图所示。
FS
Fb
m
FI
FP (t)
图中惯性力、阻尼力和
第二,这里考虑的是瞬时的平衡,荷载、 内力等都是时间的函数。
二、 动力荷载的分类
(1) 周期荷载:这类荷载随时间作周期性变化, 如图所示。例如船舶中螺旋桨产生的作用于船体 的推力就是一种周期荷载。显然,简谐荷载也属 于周期荷载。
(2)冲击荷载:其特点是荷载值在短时间内急 剧增大或者是荷载值急剧减小,如各种爆炸荷 载。
(3)采用集中质量法和广义坐标法都可使无限 自由度体系简化为有限自由度体系,它们所采用 的手法是不同的。
集中质量法:将结构的分布质量按一定规则集
中到结构的某个或某些位置上,认为其他地方没 有质量。质量集中后,结构杆件仍具有可变形性 质,称为“无重杆”。
10.2 单自由度体系运动方程的建立
研究单自由度的目的: 单自由度体系的动力分析虽然比较简单,但 非常重要。这是因为: (1) 很多实际的动力问题常可按单自由度 体系进行计算,或进行初步的估算。 (2)单自由度体系的动力分析是多自由度 体系动力分析的基础。
体系的运动方程
根据达朗贝尔原理
引入惯性力
建立瞬时平衡方程
从平衡的角度
从位移协调的角度
刚度法
柔度法
一、自由振动微分方程的建立
在结构的动力计算中,结构上各个质点的 位移是基本未知量,为求解它们,应建立质 点运动方程,即体系上所有质点的位移在运 动的每一瞬间时必须满足的运动条件。
单自由度的体系为一个常微分方程(分布 质量为偏微分方程);而多自由度体系,一 般为一组常微分方程组。
(3)突加常量荷载:在一瞬间施加于结构上并 继续留在结构上的荷载,例如粮食口袋卸落在地 板上时就是这种荷载。
(4)随机荷载:如果荷载的时间历程并不十 分清楚,而只知道经统计取得的数值时,这种 荷载称为随机荷载(非确定性荷载)。
1)地震作用:它是一种随机荷载。地震时, 由于地面激烈运动对结构产生干扰力即为地震 作用。这类荷载随时间变化的规律很复杂。
无限个自由度体系
图示为一块形基础,计算时可简化为一刚性块。 当考虑基础在平面内的振动时,体系共有三个自由度, 包括水平位移x、竖向位移y和角位移。当仅考虑基础 在竖直方向的振动时,则只有一个自由度。
自由度数与集中质量的个数并不一定彼此相等
自由度的数目不完全取决于质点的数 目,也与结构是否静定或超静定无关。
3. 本章计算原理: 达朗伯(d’Alembert )
根据达朗伯原理,动力计算问题可以转化 为静力平衡问题来处理。但是,这是一种形式 上的平衡,是一种动平衡,是在引进惯性力的 条件下的平衡。换句话说,在动力计算中,虽 然形式上仍是在列平衡方程,但是这里要注意 两个特点:
第一,在所考虑的力系中要包括惯性力 这个新的力;
有关名词
1.自由振动: 结构受到外部因素干扰发生振动,而在以后
的振动过程中不再受外部干扰的作用,这种振动 称为自由振动 。
2.强迫振动: 若在振动过程中不断受外部干扰力的作用, 这种振动称为强迫振动 。
3.结构动力计算的目的: 确定动力荷载作用下结构的内力、位移等
量值随时间而变化的规律,从而找出其最大值 以作为设计或检算的依据。因此,研究强迫振 动就成为动力计算的一项根本任务。
承受动荷载的任何线性结构体系的主要物 理特性是体系的质量、弹性特性(柔度或刚 度)、能量耗散机理或阻尼、以及外部干扰 或荷载。因此,对于各种单自由度体系的振 动状态,都可以用一质量、弹簧、阻尼器及 动荷载来描述,如图所示。
FP (t)
FP (t)
FP (t)
(1) 确定位移参数。 设质量在任一时刻的位 移为y,(向右为正)。
(1)是否考虑惯性力影响是静力问题和动 力问题最重要的区别。
(2)动力分析中自由度与结构体系组成分 析时的自由度既有相同之处又有不同之处。相 同之处是,二者都是确定体系运动位置所需的 独立坐标参数;不同之处是,在结构组成分析 中讨论的对象是不考虑质量的刚体,而在动力 分析中讨论的一般是变形体,考虑的是体系中 质量的自由度。
第十章 结 构 的动 力 计算
10.1 概述
一、 动力计算的特点
1. 本章内容: 研究结构在动荷载作用下的位移和内力分析
原理和计算方法。
2. 动力荷载: 是指荷载的大小、方向和作用点随时间而变
化的荷载。 “荷载变化的快慢”: 是与结构的固有周期相比较的。
动荷载与静荷载的不同点:
在动荷载作用下将使结构产生不容忽视的加 速度,因而必须考虑惯性力的影响。 结构围绕平衡位置发生振动,其内力和位移 不仅是位置的函数,而且是时间的函数,亦即 同一位置的内力、位移在不同时刻是不同的。 结构在动荷载作用下,其内力不仅要平衡动 力荷载,而且要平衡由于结构的变形加速度所 引起的惯性力。
4.研究自由振动的目的: 结构在强迫振动时各截面的最大内力和位
移都与结构自由振动时的频率和振型有关,因 而寻求自振频率和振型就成为研究强迫振动的 前提。
结构因动力作用而产生的位移、应力和内力统 称为结构的动态响应.结构动力学的基本任务,就在 于研究和掌握计算动态响应的规律和方法,为结构 设计提供可靠的依据.而结构的动态响应与动力特 性密切相关,其中结构的周期、自振频率和振型是 反映结构动力特性的基本特性.
图中横坐标表示时间t,纵坐标表示地面运动的 加速度。
2)脉动风压:当风力很强时,结构某处的风压 可以分解为稳定风压和脉动风压。稳定风压对一 般结构的作用可视为静荷载,而脉动风压对高耸 柔性结构(例如烟囱,水塔及电视塔)产生相当 大的振动,应视为一种动力荷载。脉动风压随时 间变化的ቤተ መጻሕፍቲ ባይዱ律很复杂,也是一种随机荷载。