液体点滴速度监控系统设计
基于单片机系统的液体点滴速度监控装置设计
南华大学电气工程学院《单片机原理及应用课程设计》任务书设计题目:基于单片机系统的液滴点滴速度监控装置专业:电气工程及其自动化姓名: 刘杰学号: 20104450244起迄日期:年月日——年月日指导教师:目录一、引言 (4)二、系统总体设计 (4)2.1系统原理框图及原理分析 (4)2.2方案设计与论证 (5)2.2.1电机驱动控制电路 (5)2.2.2 数据采集 (6)2.2.3键盘方案的选择 (7)2.2.4系统最终方案确定 (8)三、单片机系统设计 (8)3.1 硬件设计 (8)3.1.1单片机系统的硬件结构 (8)3.1.2 液体滴速检测模块 (10)3.2 软件设计 (11)四、总结 (13)参考文献 (14)英文摘要 (16)基于单片机系统的液体点滴速度监控装置设计【摘要】:利用单片机设计一个智能化的液体点滴速度监测与控制系统。
该系统由水滴速度测试系统、水速控制系统、显示装置、单片机系统、键盘和报警等系统组成。
应用水的压强随着高度差的变化而变化的原理,利用控制步进电动机的升降来控制点滴速度。
点滴速度可用键盘来设定,同时在水到达警戒线 (2cm~3cm)以下时能发出报警信号。
【关键词】:点滴速度,步进电动机,单片机1 引言目前各类医院中所使用的静脉输液器都是悬挂在病人的身体水平线以上才能输液,这种传统的输液设施的输液速度难以准确控制,这对特护病人和对输液速度有较严格要求的病人是不方便的,也会加重医护人员的工作强度。
本系统就是为了减少人力浪费,获得良好医疗效果而设计的液体点滴速度监控装置,利用这种装置可以通过电机控制储液瓶的高度来达到控速的目的;通过传感系统来确定点滴速度和对液位警戒线的检测;通过键盘设置液体点滴速度。
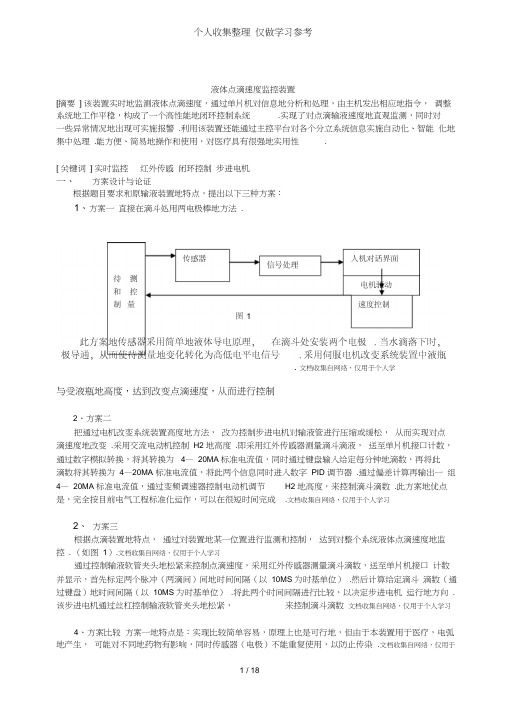
2 系统总体设计2.1系统原理框图及原理分析利用步进机和压强的原理来控制水滴的速度,有公式可以知道由于液面高度的不同而使压强不同,从而改变液滴的速度。
这样的系统比控制输液软管的松紧更好控制,而且比较容易实现。
液体点滴速度监控装置的设计
液体点滴速度监控装置[摘要 ] 该装置实时地监测液体点滴速度,通过单片机对信息地分析和处理,由主机发出相应地指令, 调整系统地工作平稳,构成了一个高性能地闭环控制系统 .实现了对点滴输液速度地直观监测,同时对一些异常情况地出现可实施报警 .利用该装置还能通过主控平台对各个分立系统信息实施自动化、智能 化地集中处理 .能方便、简易地操作和使用,对医疗具有很强地实用性.[ 关键词 ] 实时监控 红外传感 闭环控制 步进电机一、方案设计与论证根据题目要求和原输液装置地特点,提出以下三种方案:1、方案一 直接在滴斗处用两电极棒地方法 .与受液瓶地高度,达到改变点滴速度,从而进行控制2、方案二把通过电机改变系统装置高度地方法, 改为控制步进电机对输液管进行压缩或缓松, 从而实现对点 滴速度地改变 .采用交流电动机控制 H2 地高度 .即采用红外传感器测量滴斗滴液, 送至单片机接口计数, 通过数字模拟转换,将其转换为 4— 20MA 标准电流值,同时通过键盘输入给定每分钟地滴数,再将此 滴数将其转换为 4—20MA 标准电流值,将此两个信息同时进入数字 PID 调节器 .通过偏差计算再输出一 组4— 20MA 标准电流值,通过变频调速器控制电动机调节H2 地高度,来控制滴斗滴数 .此方案地优点是,完全按目前电气工程标准化运作,可以在很短时间完成 .文档收集自网络,仅用于个人学习2、 方案三根据点滴装置地特点, 通过对装置地某一位置进行监测和控制, 达到对整个系统液体点滴速度地监 控 . (如图 1).文档收集自网络,仅用于个人学习通过控制输液软管夹头地松紧来控制点滴速度,采用红外传感器测量滴斗滴数,送至单片机接口 计数并显示,首先标定两个脉冲(两滴间)间地时间间隔(以 10MS 为时基单位) .然后计算给定滴斗 滴数(通过键盘)地时间间隔(以 10MS 为时基单位) .将此两个时间间隔进行比较,以决定步进电机 运行地方向 .该步进电机通过丝杠控制输液软管夹头地松紧,来控制滴斗滴数 文档收集自网络,仅用于个人学习4、方案比较 方案一地特点是:实现比较简单容易,原理上也是可行地,但由于本装置用于医疗,电弧地产生, 可能对不同地药物有影响,同时传感器(电极)不能重复使用,以防止传染 .文档收集自网络,仅用于. 文档收集自网络,仅用于个人学习个人学习方案二通过改用红外传感器,弥补了方案一地不足.但是还存在问题,利用改变高度地方法虽然容易实现,但可控性不好.由此,我们采用了第三种方案,通过挤压输液管地办法来实现对点滴速度地控制.文档收集自网络,仅用于个人学习二、系统原理框图如图 2 所示.图2本系统最主要地是充分利用单片机编程地灵活性和其强大地功能,使一些小地系统实现自动化和智能化成为了现实.其中地器件都比较简单,尽大可能地利用各集成芯片地功能,如系统地键盘和显示原理电路.通过红外传感器对水滴滴落地动态信息地感应,单片机对数据地采集分析和处理,同时使用小功率地步进电机进行机械调整,使装置能机智、即时地响应操作者地使用.文档收集自网络,仅用于个人学习三、主要电路原理与设计1 、AT89C51 单片机基本系统控制与数值信号处理地核心采用AT89C51 单片机,采用串口工作方式.电路如图 3.文档收集自网络,仅用于个人学习2、显示与键盘如图4利用74LS164 进行串行动态9 位数码管显示,74LS164 地主要功能是8bits 地串入并出数据处理.电路结构简单,功能强大.采用中断和查询地方法,设计地 4 键键盘地形式,利用单片机地灵活图43、红外传感和信号处理采用红外线地发射和接收装置,它可用来检测包括液体在内地各种透明体、半透明体、不透明体,从而可以灵敏地反应水滴滴下.利用光电耦合器对电信号进行处理,减少干扰.文档收集自网络,仅用于个人学习4、步进电机驱动和控制如图5图55、声光报警当检测到液面低于3cm 时由单片机采集到报警信号,由报警芯片发出声光报警5 、主控制平台可以组建一个小型地网络系统,由主机控制和监视各个从机地工作状态和各个装置地信息. 如图 6 文档收集自网络,仅用于个人学习图6四、系统软件工作流程如图7 到图121、软件设计:软件部分参考流程图,这里主要讲述一下软件编写过程中地几个细节部分.如前所述,我们计算滴水速度地原理是通过求出 2 个水滴之间地时间差,通过分析,我们通过定时器建立一个基准时钟,该基准时钟有 2 个字节单元,分别秒单位和10 毫秒单位地数值.在每次传感器送来中断地时候调用“传感测量”子程序,在该子程序中,我们在取当前触发时间时,先把上一个脉冲发生地时间保存在“历史寄存器”中,然后再更新“当前寄存器”地值,即取当前脉冲地发生时间.这样我们就记录下了 2 个时间(连续)值.文档收集自网络,仅用于个人学习历史寄存器当前寄存器基准时钟7由于基准时钟是以10 毫秒为最小单位地,而对于频率范围在20Hz~150Hz 地脉冲而言,因为我们在后边地求滴速中要用到10 毫秒单位值,而水滴地下落并不能保证绝对地规则,经测试发现,每一次求差后地值总有几个单位毫秒地变动,这个变动就导致了最终运算出来地滴速值地大幅度变化,后来惊观察发现这种误差可以归为周期性误差,所以为了消除这个误差,我们不是简单地只取一个差值,相反,我们是取了10 个差值,然后再求平均值,这样处理地最大一个好处是可以使周期性误差地正、负偏差互相抵消,在很大程度上消除上述误差.文档收集自网络,仅用于个人学习前面地处理虽然可以提供一个比较接近真值,对于最终显示出来地影响不大,但当要用这个值去控制滴速夹时,很明显这样处理地结果降低了控制地响应度;而另一方面,对于滴速夹地控制,因为我们采用地是步进电机,而且我们对步进电机地转轴又进行了改造,加了一个螺纹栓,可以保持滴速夹控制端地位置,所以我们在每采集一个脉冲间隔时就进行滴速地更改控制,这样可以提高控制设备地响应速度.所以在本系统中对于建立一个科学合理地系统模型是很有必要地.文档收集自网络,仅用于个人学习在对滴速进行控制时,我们借鉴了PID 算法,建立了一个闭环控制状态,利用类似于锁相环地模型:即把设定地滴速和当前地滴速进行比较,输出一个差值,利用这个差值地极性来决定电机地正反转,并拉小这个差值直至最小.因为每检测到一个传感信号,我们就把设定值和当前值进行比较,这样不仅提高了设备地响应速度,而且由于我们这个系统地基准时钟是以10 毫秒为单位了,因为我们能分辨到10 毫秒地数量级,可以使当前值非常接近我们所设定地设定值.文档收集自网络,仅用于个人学习这一点可以参照电机控制地流程图.(图12)1、运算过程:因为我们系统地基准时钟是以10 毫秒为单位了,虽然加大了系统地精度,但是却给系统地数值运算带来了麻烦,直接用四则运算(特别是乘除地运算)很容易带来无法避免地运算误差,即在运算是因为运算位数地限制而带来地数据尾数地丢失. 前面说过这种误差将对我们对信号地处理和显示产生很大了影响,甚至会得到一个误差很大地最终输出,为避免这种情况,我们在保证精度地基础上采用了查表法,并且在建立表格时对数据进行一定地折中处理,使得最终得到了结果地误差能尽量小,实践证明我们这种方法还是有一定地实用性地.而且查表法地结果便于以后系统误差地自我校正,因为它保存了一个恒值.文档收集自网络,仅用于个人学习2 、对数据表格地处理:前面说过我们这个系统地基准时钟有两个字节单元,而即使采用题目要求地滴速(20~150 分/滴)也将需要260 个字节,这已经超过了8 位单片机地查表范围,所以怎样建立一个合理地查表算法是很有必要地.通过对数据地观察,我们发现虽然每个时间量有两个字节,但是在秒字节地单元里,总共只能出现4种取值,即1、2和3以及0 ,所以我们可以以这4个值为标量对表格地数据进行划分,由于有了秒字节单元来做区分,我们只要在表格中写入10 毫秒字节单元地值就行了,通过综合处理,在保证精度地基础上,我们所建立地表格地字节数为100 多个,这样不仅满足了8 位单片机地查表范围,而且大大了节省了内存,有利于系统资源地优化分配. 文档收集自网络,仅用于个人学习3、通信地建立:在选择方案时,考虑到通信线地多少,我们采用了串行通信,直接利用单片机本身地串行通信口,在软件上我们考虑用串行通信地方式0 来进行通信.通信协议如下:先发送握手信号,然后发送被呼叫地从机号,每个从机在接收到地址时跟自身地地址进行比较,如果不是被呼叫机,则关闭通信链路;如果是则发送响应信号.当确定了通信地链路后,就按照预定地数据包格式进行通信.数据包格式如下:文档收集自网络,仅用于个人学习操作码2、程序流程图个人收集整理仅做学习参考图8个人收集整理仅做学习参考传感测量:学习时钟:文档收集自网络,仅用于个人图9 图10个人收集整理仅做学习参考步进电机控制:文档收集自网络,仅用于个人学习键盘:个人收集整理仅做学习参考图11 图12 3、源程序:时间基准缓冲区:秒55h 0.01 秒56h键盘设置缓冲区:秒57h 0.01 秒58h传感测量缓冲区:前次—秒51h 0.01 秒52h 当前—秒53h 0.01秒54h 差值—秒4fh 0.01秒50h文档收集自网络,仅用于个人学习最终显示缓冲区:选择值:54h 测定值5ah 5bh 5ch 设置值5dh 5eh 5fh R4 用于步进电机地步进记忆org 0000hajmp mainorg 0003hajmp jpint org 000bh ajmp times org 0013h ajmp cgint org 0040h ;int0 ;t0 ;int1main:mov sp,#60h ;设置堆栈mov 5eh,#00hmov 5fh,#00hmov r7,#00hsetb f0clr p2.1mov tmod,#01h ;T0 为工作方式0mov tl0,#0f0h ; 计数器初值mov th0,#0d8hmov ie,#87h ;中断设置,除T1,ES 外全开中断mov 41h,#00h mov 42h,#00h mov 43h,#00h mov 44h,#00h mov 45h,#00h mov 46h,#00h mov 47h,#00h mov 48h,#00h mov 4fh,#00h mov 50h,#00h mov 51h,#00h mov 52h,#00h mov 53h,#00hmov 54h,#00h mov 55h,#00h mov 56h,#00h mov 54h,#00h mov 57h,#00h mov 58h,#00h mov 59h,#00h mov 5ah,#00h mov 5bh,#00h mov 5ch,#00h mov 5dh,#00h ;初值设置;以上为时间初值;初值显示为00mov ip,#02h setbit0 setb it1 setb tr0setb p1.4 disp:acalldisp0ajmp disp;中断优先级;脉冲触发方式;启动定时;调用显示子程序disp0: push accmov dptr,#tablejnb f0,disp1 mova,54h cjnea,#01h,zzz1movc a,@a+dptrmov sbuf,a jnbti,$ clr ti mova,#0ffh movsbuf,a jnb ti,$ clrti acall dealy;选择值显示ajmp disp1 zzz1:cjne a,#02h,zzz2 movca,@a+dptr mov sbuf,a jnb ti,$ clr ti mova,#0ffh mov sbuf,a jnb ti,$ clr ti acall dealy ajmp disp1 zzz2:cjne a,#03h,zzz3 movca,@a+dptr mov sbuf,a jnb ti,$ clr ti mova,#0ffh mov sbuf,a jnb ti,$ clr ti acall dealy ajmp disp1 zzz3:mov 54h,#00hdisp1:mov a,5ah ;测定值显示cjne a,#00h,disp2 ajmp disp3 disp2:cjnea,#01h,disp4 disp3:movc a,@a+dptr mov sbuf,a jnb ti,$ clr ti mov a,#0feh mov sbuf,a jnb ti,$ clr ti acall dealydisp4:mov a,5bh movc a,@a+dptr mov sbuf,a jnb ti,$ clr timov a,#0fdh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5ch movc a,@a+dptr mov sbuf,a jnbti,$ clr ti mov a,#0fbh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5dh ;设置值显示movc a,@a+dptr mov sbuf,a jnb ti,$ clr ti mov a,#0dfh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5eh movc a,@a+dptr mov sbuf,a jnbti,$ clr ti mov a,#0bfh mov sbuf,a jnb ti,$ clr ti acall dealymov a,5fh movc a,@a+dptr mov sbuf,a jnb ti,$clr ti mov a,#7fh mov sbuf,a jnb ti,$ clr ti acall dealy pop acc retdealy: mov r0,#0fah lll: nop nop djnz r0,lll ret table:db 03h db 9fh db 25h db 0dh db99h db 49h db 41h db 1fh db 01h db 09hjpint: ;键盘控制子程序push acc push 07h mov r2,#0ah zzz:acall dealy djnz r2,zzzjb p1.0,x2 ;选择键子程序inc 54h clr ex1 setb f0 mov a,54h cjnea,#04h,x1 mov 54h,#01h x1:ajmp ret0 x2:jb p1.1,x3 ;加 1 键子程序mov a,54h cjne a,#00h,lll1ajmp ret0 lll1:cjne a,#01h,lll2 inc 5fh mov a,5fh cjne a,#0ah,zhongju mov 5fh,#00h ajmp ret0 lll2:cjne a,#02h,lll3 inc 5eh mov a,5eh cjne a,#0ah,ret0 mov 5eh,#00h ajmp ret0 lll3:inc 5dh mov a,5dh cjne a,#0ah,ret0 mov 5dh,#00h ajmp ret0 x3:jb p1.2,x4 ;减 1 键子程序mov a,54h cjne a,#00h,llll1 ajmp ret0llll1:cjne a,#01h,llll2 dec 5fh mov a,5fh cjne a,#0ffh,ret0 mov 5fh,#09h ajmp ret0 zhongju:ajmp ret0 llll2:cjne a,#02h,llll3 dec 5eh mov a,5eh cjne a,#0ffh,ret0 mov5eh,#09h ajmp ret0 llll3:dec 5dh mov a,5dh cjne a,#0ffh,ret0 mov 5dh,#09h ajmp ret0x4:jb p1.3,x5 ;确定键子程序clr f0 acall enter ; 因指令而修改ret01: ;对整数进行修正mov a,r7cjne a,#14,ccc1mov 57h,#03h ;为20 置 3setb ex1ajmp ret0ccc1:cjne a,#1eh,ccc2mov 57h,#02h ;为30 置 2setb ex1ajmp ret0ccc2:cjne a,#3ch,ret02mov 57h,#01h ;为60 置 1setb ex1ajmp ret0x5:jb p2.0,ret0 ;报警监测setb p2.1 ;送报警声音ajmp ret0 ret02:setb ex1 ret0:pop acc pop 07h reti enter:mov 54h,#00h clr cmov a,5dh ;求时间段程序mov b,#64h ;百位数mul abmov r7,amov a,5ehmov b,#0ah ;十位数mul abadd a,r7mov r7,amov a,5fhadd a,r7mov r7,a ;此时r7 中为设定值clr csubb a,#14h ; 查表前减20mov dptr,#table1 ;由数值查时间段表movc a,@a+dptrmov 58h,arettimes: ;时间设置push accmov tl0,#0f0hmov th0,#0d8hsetb tr0 inc 56h mov a,56h cjnea,#64h,quit0 mov 56h,#00h inc 55hquit0:pop acc reticgint: ;传感测量mov r2,#0ah zzzz:acall dealy djnz r2,zzzz jnb p3.3,cgint1 reticgint1:push acc push 03h push 04h push 05h push 06h inc r7cjne r7,#0ah,zhongju1mov r7,#00hmov a,53h ;数值转移mov 51h,amov a,54hmov 52h,amov a,55h ;读取当前时间mov 53h,amov a,56hmov 54h,aclr c ;求10 个脉冲差值子程序mov 47h,#00h ;10 差值寄存区mov 48h,#00hmov a,53hsubb a,51hmov 47h,aclr cmov a,54hsubb a,52hjnc zero ;如果当前值大就跳转dec 47hclr cmov a,#00h mov a,54h add a,#64h subb a,52hzero:mov 48h,a mov a,47h mov b,#0ah div ab mov4fh,a mov a,b mov r3,a mov a,48h mov b,#0ah div ab mov 50h,a mov a,b movr4,a mov a,r3 mov b,#0ahmul ab add a,50h mov50h,a zhongju1:mov a mov42h,a mov a,43h mov 41h,amov a,55h mov 43h,a mova,56h mov 44h,a clr c ;求差值子程序,供电机使用mov 45h,#00h mov46h,#00h mov a,43h subba,41h mov 45h,a clr c mova,44h subb a,42h jnc zero1 ;如果当前值大就跳转dec 45h clr c mov a,#00h mov a,44hadd a,#64h subb a,42h zero1:mov 46h,a mov a,45h mov a,4fhcjne a,#03,ddd1 mov 5ah,#00h mov 5bh,#02h mov 5ch,#00h ajmp exit ddd1:cjne a,#02h,ddd2 mov a,50h jnz ddd01 mov 5ah,#00h mov5bh,#03h mov 5ch,#00h ajmp exit ddd01:mov b,#0ah div ab mov dptr,#table2 ;秒值为 2 地表movc a,@a+dptr mov r5,a anl a,#0fh mov 5ch,a mov 5bh,#02h mov 5ah,#00h ajmp exit ddd2:cjne a,#01h,ddd3 mov a,50h jnz ddd02 mov 5ah,#00h mov 5bh,#06h mov 5ch,#00h ajmp exit ddd02: mov b,#0ah div ab mov dptr,#table3 ;秒值为 1 地表movc a,@a+dptr mov r5,a anl a,#0fh mov 5ch,a mov a,r5 swap a anl a,#0fh mov 5bh,a mov5ah,#00h ajmp exit ddd3: mov a,50h cjnea,#3ch,ddd03 mov 5ah,#01h mov 5bh,#00h mov 5ch,#00h ajmp exit ddd03:clr csubb a,#3chjc lar100 ;大于100 跳转mov 5ah,#00h ;小于100mov dptr,#table4 ;60 到99 地表movc a,@a+dptrmov r5,aanl a,#0fhmov 5ch,amov a,r5swap aanl a,#0fhmov 5bh,aajmp exitlar100:mov 5ah,#01hclr cmov r5,50hmov a,#3chsubb a,r5mov dptr,#table5 ;100 到150 地表movc a,@a+dptrmov r5,aanl a,#0fhmov 5ch,amov a,r5swap aanl a,#0fhmov 5bh,aexit:jb f0,exit1 ;F0为 1 时电机不工作acall dianjic ;送步进电机子程序exit1:pop 05hpop 03h pop 04h pop acc pop 06h reti dianjic: ;电机控制子程序.zhengzh 为前进,fanzh 为后退push accclr cmov a,57hsubb a,45hjz lowdc ;如果高位相等则进行低位比较;平均差值;秒余数暂存;0.01 秒暂存,44h ;送动态显示缓冲区;整值判断jc jcc1 ;当前滴速小于设定滴速,须反转放松acall zhengzh ;当前滴速大于设定滴速,须正转挤压ajmp outjcc1:acall fanzhajmp outlowdc:clr cmov a,58hsubb a,46hjz outjc jcc2acall zhengzhajmp outjcc2:acall fanzhout:pop accretzhengzh: ;前进挤压mov dptr,#table0inc r4mov a,r4cjne a,#06h,zhengzmov r4,#00hmov a,#00hzhengz:movc a,@a+dptrmov p1,aretfanzh: ; 反转放松mov dptr,#table0dec r4mov a,r4 cjnea,#0ffh,fanz movr4,#05h mov a,#05h fanz:movc a,@a+dptr mov p1,a ret table0: db 80h db 0c0h db40h db 60h db 20h db 0a0h table1: dB 00H dB 86H dB 73H dB 61H dB 50H dB 40H dB 31H dB 22H dB 14H dB 07H dB 00H dB 94H dB 88H dB 82H dB 76H dB 71H dB 67H dB 62H dB 58H dB 54H dB 50H dB 46H dB 43H dB 40H dB 36H dB 33H dB 30H dB 28H dB 25H dB 22H dB 20H dB 18H dB 15H dB 13H dB 11H dB 09H dB 07H dB 05H dB 03H dB 02H dB 00H dB 98H dB 97H dB 95H dB 94H dB 92H dB 91H dB 90H dB 88H dB 87H dB 86H dB 85H dB 83H dB 82H dB 81H dB 80H dB 79H dB 78H dB 77H dB 76H dB 75H dB 74H dB 73H dB 72H dB 71H dB 71H dB 70H dB 69H dB 68H dB 67H dB 67H dB 66H dB 65HdB 65H dB 64H dB 63H dB 63H dB 62H dB 61H dB 61H dB 60H dB 59H dB 59H dB 58H dB 58H dB 57H dB 57H dB 56H dB 56H dB 55H dB 55H dB 54H dB 54H dB 53H dB 53H dB 52H dB 52H dB 51H dB 51H dB 50H dB 50H dB 50H dB 49H dB 49H dB 48H dB 48H dB 48H dB 47H dB 47H dB 47H dB 46H dB 46H dB 45H dB 45H dB 45H dB 44H dB 44H dB 44H dB 43H dB 43H dB 43H dB 43H dB 42H dB 42H dB 42H dB 41H dB 41H dB 41H dB 41H dB 40H dB 40H table2: db 29h db 28h db 27h db 26h db 25h db 24h db 23h db 22h db 21h table3: db 57h db 52h db 49h db 45h db 42h db 39h db 37h db 35h db 33h db 31h table4: db 99h db 98h db 97h db 95h db 94h db 93h db 91h db 89hdb 88h db 87h db 86h db 84h db 83h db 82h db 81h db 80h db 79h db 78h db 77h db 76h db 75h db 74h db 73h db 72h db 72h db 71h db 70h db 69h db 68h db 68h db 67h db 66h db 65h db 65h db 64h db 63h db 63h db 62h db 61h table5: db 00h db 02h db 04h db 06h db 08h db 10h db 12h db 14h db 16h四、 系统测试1、仪器1) 数字示波器 2) 信号发生器 3) 数字计数器2、 波形测试 利用示波器观察红外传感电信号是否规则 .若不规则,说明传感器转化地电信号需要进一步处理, 或者是传感器本身有问题, 需要检查 .直到有规则地方波输出为止 .文档收 集自网络,仅用于个人学习用数字计数器对液滴计数 .在系统电路工作时,用数字计数器地表笔从传感器转化 地电信号输出端相接, 对点滴数计数与系统显示做比较, 从而进一步校正电路测量地准 确度 .文档收集自网络,仅用于个人学习3、 测量数据单机测量: 与计数器比较:db 18h db 20h db 22h db 25h db 28h db 30h db 33h db 36h db 39h db 43h db 46h db 49h end。
液体点滴速度监控系统的设计

液体点滴速度监控系统的设计摘要输液是医院常⽤的治疗⼿段,传统输液过程中存在着输液速度不精确、需要⼈⼯监护等弊端。
本⽂的⽬标就是设计⼀种输液监控系统以解决此问题。
本⽂设计的液体点滴速度监控装置系统,实现了对输液速度的检测与控制,实现了对储液瓶中液⾯⾼度的检测报警,并且动态显⽰输液速度。
使⽤者可以通过按键设置输液速度,系统将⾃动对输液速度进⾏控制。
此外系统还实现了多机通信,即⼀个主站控制⼀个和主从机之间的数据传输。
当输液结束或输液速度发⽣异常时,从站使⽤发光⼆极管和蜂鸣器进⾏报警,并将报警信号通过串⾏⼝传送⾄主站,主站通过监控软件和蜂鸣器实现声光报警。
系统以8051单⽚机为核⼼,使⽤两块系统板(主机和从机)组成有线监控系统,主机实现对从机的控制及液体点滴速度的显⽰和液体点滴速度的键盘控制;从机通过外围电路检测储液瓶中液⾯⾼度和液体点滴速度;通过从机实现对步进电机控制以实现对储液瓶⾼低的控制,来实现控制液体点滴速度。
在整体⽅案设计中,在保证设计系统能达到的题⽬要求的精度和稳定度的前提下,考虑到系统的轻便性、实⽤性、可靠性,对电路系统进⾏了优化。
关键词:点滴速度;光电传感器;步进电机;单⽚机ABSTRACTTransfusion commonly used as treatment in hospital, but there were some problems, such as inaccurate, need transfusion of artificial guardianship, etc. The goal is to design a transfusion monitoring system in order to solve those problems.The monitoring and controlling system of liquid drop speed by this paper, actualize the infusion rate of test, the control of reservoir fluid bottle level detection alarm and dynamic display of transfusion speed. Users can through the button to control transfusion speed and system will automatically transfusion speed of it. Besides the system also actualize multi-machine communication, that is, a master station to control a multiple machine from a station and the master-slave data transmission between. When the infusion end or infusion speed abnormal, slave light-emitting diodes and buzzer to alarm, and will alarm signals through serial transmission to the master, stood by buzzer sound-light alarm.The systems use 8051 SCM as machine?s core. Use two systems board (host and slave) component cable monitoring system for control of the machine from host. The master station achieves the displaying of liquid drip speed and the keyboard to control liquid drip speed. Slave machines through the outer circuit testing reservoir liquid bottle in height and liquid dropping speed, and through the control of stepping motor speed control the level of liquid storage bottle to control liquid drop speed.In the overall program design, in ensuring the use of design systems to achieve th e required accuracy and stability of the premise, taking into account the system?s portability, practicality, reliability, electrical systems were optimized.Key words: liquid drop speed; photoelectric sensor; Stepper Motor; single chip⽬录第⼀章绪论 (1)1.1课题背景 (1)1.2课题研究的⽬的和意义 (1)1.3 输液报警监控系统的⽅法 (2)1.4 本课题采⽤的输液报警监控内容⽅法简介 (2)1.5本⽂的结构 (3)第⼆章输液监控系统的总体⽅案 (4)2.1 输液监控系统的设计依据和⽬的 (4)2.2系统⽅案论证与⽐较 (5)2.2.1 控制⽅案的⽐较 (5)2.2.2点滴检测⽅案⽐较 (5)2.2.3液位监测⽅案⽐较 (5)2.2.4速度控制⽅案 (6)2.2.5电机的选择 (6)2.2.6主从机通信⽅案 (7)2.3系统总体框图 (8)第三章系统的硬件设计 (10)3.1 系统的硬件设计 (10)3.2 从站各系统单元的设计 (11)3.2.1中央处理单元 (11)3.2.2点滴信号检测单元 (11)3.2.3点滴信号的⽐较、滤波、整形电路 (12)3.2.4 液位检测单元 (13)3.2.5检测电路的抗⼲扰措施 (14)3.2.6声光报警电路 (1)4.3.2.7 步进电机驱动单元(⾼度调整单元) (15)3.2.8 主从站接⼝电路 (16)3.3 主站的硬件电路图及⼯作原理 (17)3.3.1键盘单元 (18)3.3.2 数码管显⽰单元 (20)3.4 主从站芯⽚时钟电路 (21)3.5 主从站复位单元 (21)3.6 电源电路 (22)第四章液体点滴监控系统的软件设计 (24)4.1 从站各模块软件设计 (25)4.1.1 主控模块设计 (25)4.1.2 点滴速度测量模块设计 (25)4.1.3 电机控制算法 (27)4.1.3.1 电机控制原理 (27)4.1.3.2 点滴速度控制 (28)4.1.4 通信程序通信模块设计 (29)4.1.4.1 串⼝通信参数设置 (29)4.1.4.2 通信协议约定 (30)4.1.4.3 主控模块设计 (31)4.1.5 报警模块设计 (32)4.2 从站各模块软件设计 (33)4.2.1 主控模块设计 (33)4.2.2 输⼊键盘模块的设计.................................................................33.4.2.3 数码管显⽰模块的设计 (34)第五章总结及展望 (37)5.1总结 (37)5.2 展望 (38)5.3⼼得体会 (39)致谢 (40)附录⼀电路原理图 (41)附录⼆部分程序清单 (43)第⼀章绪论1.1课题背景输液(俗称打点滴)是临床医学上最常⽤的治疗⼿段。
无线液体点滴速度监控装置的设计
CONO MIC CON STR UCTION 经济建设5环球市场信息导报无线液体点滴速度监控装置的设计输液速度的快慢直接影响药效以及患者生命安全。
临床上人为监控误差大、可操作性差,使得输液速度很难实时控制。
本文设计的液体的点滴速度监控装置利用红外传感器实时检测输液的速度,将采集的点滴速度实时无线传输给控制中心,控制中心通过与设定速度比对发出无线控制信号,来调节流速调节器来调节液体的流速,从而实现点滴速度自动调节。
本设计只需将速度检测和速度调节部分固定在一次输液器上即可使用,无需专用输液器,也可扩展应用到其他液体速度监控装置领域。
点滴输液是临床上最为常见的治疗方法之一,大部分药物的输液速度都有严格的规范。
由于在输液前人工控制速度存在误差,在输液过程中人工监护输液速度工作量大很难保证输液的速度。
目前的研制点滴液体速度监控装置大多都为有线检测装置且需要通过输液瓶的高度来调节点滴的速度,这些点滴输液器需要专用的输液器使得输液成本加大,很难在医疗市场推广。
为了解决以上问题,本文设计了一款无线液体点滴速度监控装置。
该系统以单片机ST C 89C52为控制中心,采用红外发射接收对管装置检测液滴速度,并实时将检测的速度值无线发送给控制中心,控制中心根据传输的速度值来实时发送控制信号给液体调速模块来实时调节液体流速,从而实现点滴流速自动监控的目的。
1.硬件设计本系统硬件采用模块化设计,如图1所示,包括速度检测、控制中心、速度调节三个模块。
每个某块都是一个独立的系统均可以独立工作。
速度检测部分检测输液速度值并将速度信号实时传输给控制中心;控制中心部分主要负责接收检测部分的速度数据信号,根据接收的速度值来判断是否需要调速,若需要调速则向速度调节模块发送速度调节模块信号;速度调节再接收到速度调节信号后,判断是速度增加还是减少信号然后驱动步进电机调节液体流速调节器孙佰顺武传佳李洪亮图硬件原理框图81的调节滚轮来增加或减少点滴输液速度。
液体点滴速度监控

• (2)储液检测电路仍然采纳红外对管发射 接收装置。
• (3)点滴速度控制是利用电动机正反转来 调节储液瓶的高度来实现的。
• (4)数码管显示当前的滴速,同时显示调 节的速度。
3
速度部分大致思路:
转动系统
信号采集系统
显示电路
单片机处理电路
4
光电探测器
实验要求:
1
组内组合:任务分配稍微明确,由我和朱立负责硬
件和文章部分,软件大部分由王忠印负责。
硬件部分
光电传感器、比较器、数码管 直流驱动电路、输入键盘 报警电路等等
本实验分为
软件部分
键盘、PWM、测速 电机控制程序、数码管显示
2
系统最终方案确定
• 根据以上方案的论证分析,结合器件与设 备等因素,系统各模块方案确定如下:
• 解决方案:使用430程序框架+官方程序改 编。
12
5
比较器:
6
直流电机驱动电路图
7
显示+键盘电路:
8
• 本次练手历尽各种磨练终于比较顺利的完 成了实验所要求的任务;
• 当然在这之中也遇到了许许多多的问题, 但在我们三人组合的讨论和老师的帮助下 基本上一一被解决。程序和电路大部分实 现原创性,但这之中还有很多瑕疵,需要 以后有时间时再做改进。
9
问题一:
• 选择大瓶时,电动机带动不了,转速跟不 上,瓶子基本处于不动状态,而且电压源 12V电压会被强制下拉。
解决方案: 更换小瓶,电机转ቤተ መጻሕፍቲ ባይዱ比大瓶好了很多
10
问题二
• 电机一度只会上升不能下降,速度刷新不 了
解决方法: 经过层层修改演示,发现判断条件有疏漏。
液体点滴速度监控系统设计
液体点滴速度监控系统设计摘要:本设计研制了一种液体点滴速度监控系统。
该系统以单片机为核心,可以实现自动检测并显示液体点滴的速度、用键盘设定点滴速度和对异常情况进行声光报警等功能。
采用红外光电传感器检测液位信号,通过硬件滤波和保护装置消除杂散光干扰。
并能通过上位机与下位机之间的串行通信,实现对多台下位机进行远程监控与管理。
该系统工作稳定、操作简便,能有效的解决目前简易液体点滴装置和输液泵之间的空缺,在医疗卫生领域中具有广泛的应用前景。
关键词:点滴速度,单片机,串行通信,步进电机Abstract:The monitoring system for the transfusion was developed with microcontroller unit used as a core. The system realizes auto detection and display of the drip velocity. The drip velocity can be set by keyboard and the abnormal event alarm has achieved. The signal of the liquid level was detected by the infrared photoelectric sensor, and the interference of abnormal light was eliminated by the hardware filter and the protect device. In addition, the remote monitoring and managing of several lower computers was achieved by serial communication. The system is stable in performance and simple in operation. The system has bright application future in medical treatment field.Keywords:Dropping speed, Microcontroller unit, Serial communication, Stepping motor目录1前言 (1)1.1 设计背景 (1)1.2 设计目标 (1)1.3 技术路线 (1)1.4 实施计划 (2)1.5 必备条件 (2)2总体方案设计 (3)2.1 方案比较 (4)2.1.1 滴速检测方案 (4)2.1.2 液位检测方案 (4)2.1.3 滴速控制方案 (4)2.1.4 电机选择方案 (5)2.1.5 点滴速度计算方案 (5)3单元模块设计 (7)3.1 各单元模块功能介绍及电路设计 (7)3.1.1 滴速检测模块设计 (7)3.1.2 液位检测模块设计 (7)3.1.3 电机驱动模块设计 (8)3.1.4 声光报警模块设计 (10)3.1.5 键盘模块设计 (10)3.1.6 显示模块设计 (11)3.1.7 通信模块设计 (12)3.1.8 中央控制模块设计 (13)3.1.9 电源模块设计 (14)3.2 电路参数的计算及元器件的选择 (14)3.2.1 时钟电路 (15)3.2.2 复位电路 (15)3.3 功能器件的介绍 (15)3.3.1 AT89C51介绍 (16)3.3.2 8255A介绍 (18)4软件设计 (24)4.1 软件设计所用工具 (24)4.2 软件结构图 (24)4.3 软件流程框图 (25)4.3.1 上位机软件流程框图 (25)4.3.2 下位机软件流程框图 (26)4.3.3 上、下位机通信软件流程框图 (28)5系统调试 (31)6系统功能、指标参数 (38)6.1 系统能实现的功能 (38)6.2 系统指标参数测试 (38)6.2.1 点滴速度测试 (38)6.2.2 报警功能测试 (39)6.3 系统功能及指标参数分析 (39)7结论 (40)8总结与体会 (42)9谢辞 (43)10参考文献 (44)附1 系统的原理电路图 (45)附2 外文文献翻译-译文 (46)附3 外文文献翻译-原文 (56)1前言随着医院管理系统趋向于电子化、网络化,利用单片机与现代控制技术提高医疗器械的自动化程度成为目前主要应用方向之一。
智能点滴监控系统毕业设计

智能点滴监控系统毕业设计哎呀,今天咱们聊聊这个“智能点滴监控系统”毕业设计,听起来可酷了吧?想想啊,医院里那些忙得不可开交的护士们,忙得像陀螺一样,跑东跑西。
就像电影里的超级英雄,没时间喘口气!他们得时刻关注病人的状况,尤其是那些正在接受点滴的朋友们。
点滴,真是小小的瓶子,里面却藏着大大的责任。
说实话,护士每次都得认真盯着点滴的流速,生怕出个岔子,病人一不留神,哎呦,这可不是开玩笑的事。
于是,咱们的设计目标就出现了——嘿,让这项工作变得简单点儿,别让护士们像猴子一样东跑西跳。
我们就想,为什么不弄个智能系统来帮忙呢?一套点滴监控系统,能够实时监测点滴的流速,甚至还能发出警报,提醒护士们。
你想啊,这样一来,护士就能省出时间,去关注其他病人。
这样一想,心里不禁美滋滋的。
我们开始动手。
设计的过程就像做饭,材料得准备齐全,锅子得热好,火候掌握得当。
我们先选定了传感器,这小家伙可是关键,得能精准测量液体流动的速度。
我们给它起了个名字,叫“流速小子”,多可爱啊!然后,咱们得把它跟计算机连接,软件要写得清清楚楚,界面得简单明了,方便护士们使用。
就像大厨做菜,一定要考虑到食客的口味。
光有硬件、软件还不够,咱们还得考虑到数据安全。
哎,医院可不是随便玩的地方,病人的隐私得保护好。
于是,我们加了一层加密,确保信息只在有权限的人之间流通。
你说,技术再牛逼,安全第一,才能安心使用嘛。
设计的过程中,难免会遇到挫折。
那天,我们调试的时候,流速小子竟然给我们开了个玩笑,流速显示的完全不对,简直就像打错了算盘一样。
我们心里那个气啊,直想把它“请”去隔壁教训一番。
不过,没关系,调试问题就像拼图,耐心点,总能找到那个“对”的位置。
几天后,流速小子终于老实了,数据也准得让人刮目相看。
说到这,真是感慨万千。
经历了一番波折,大家齐心协力,才把这个智能监控系统的雏形给搞出来。
之后,我们在模拟环境中进行了测试,病人一号、病人二号,统统上阵,流速小子表现得可棒了,数据准确得像个神仙。
的液体点滴速度监控系统设计
基于89C51的液体点滴速度监控系统设计汪国桢(上海交通大学 微电子学院,上海)摘要:本设计采用89C51单片机最小系统作为核心控制器件,由直流电动机作为液体点滴速度的控制执行器件,进行液体点滴滴速的控制。
选择合适的传感器,准确地检测出模拟信号是实现本次设计的关键所在,本设计中使用了对水滴检测效果甚好的槽型光电耦合器(每当液滴被检测到,立即输出一个脉冲信号)来完成精确的点滴速度的测定。
串行通讯接口建立了主站与从站的有线监控系统,主机采用VB编写的界面,显示了友好的人机交互界面。
制成了一套简易实用的液体点滴速度监控装置。
经过调试实验,表明本装置较好地完成该项目所提出的设计任务。
关键词:单片机;点滴速度;直流电机中图分类号: TP29System Design for Control Liquid Drop Speed With 89C51Wang GuoZhen(Shanghai Jiao Tong University, school of microelectronics)Abstract: In our system, the single-chip/piece computer was adopted as a core controller , with the DC-motor carrying out the drive of the control of drop velocity. In the case of the liquid drop ,device,selecting a suitable sort of sensor is a critical part of the process. The application of a special kind of principal phototransistor, which has a nice output characteristic(a impulse signal will be sent out ,as soon as detecting is successfully received),implements the accurate detecting of the water dropping in our device . The serial port communication constructs a cable monitor system between principal and subordinate computers, the principle computer display a friendly human/machine screen in VB(Visual Basic)computer programming language. Then a readily and useful set of the liquid drop monitor device is completed. It was proved our device realizes the standard of the project after regulating experiment.Keywords: MCU; DC-motor; dropping speed1.引言液体点滴速度控制系统对于大型医院来说是一套能够提高效率和服务质量的控制设备,特别是远程监控功能能使护士站对于病人的点滴状况进行实时监视,并可根据病人状态调节点滴速度。
液体点滴速度监控系统的设计
液体点滴速度监控系统的设计该系统主要由硬件和软件两部分组成。
硬件部分包括传感器、控制器、显示器和报警器;软件部分则负责数据处理和显示。
首先,我们需要选择适合的流速传感器。
传感器可以通过各种方式测量流体的速度,比如利用涡街传感器、超声波传感器或者压力传感器。
根据实际需要以及成本等因素,选择合适的传感器。
在液体点滴管路中添加一个流速传感器,传感器会通过传感器信号转换为电信号,并输入到控制器中进行处理。
控制器会对传感器获得的电信号进行放大、滤波等处理,得到准确的液体流速数据。
为了实现实时监测,监控系统需要进行数据处理和显示。
控制器会将处理好的流速数据传输到计算机或者显示器上,并显示在屏幕上。
同时,系统可以设置不同的报警阈值,当液体的流速超过或者低于设定的范围时,报警器可以发出声音或者进行其他形式的报警,提醒医护人员进行处理。
为了确保系统的准确性和稳定性,我们需要进行校准和稳定性测试。
校准可以通过将已知流速的溶液通过系统,与测量值进行比对来实现。
稳定性测试可以通过长时间的运行和监测,检测系统的稳定性和精度。
设计一个完善的液体点滴速度监控系统还需要考虑以下几个方面:1.系统的可靠性和稳定性:在设计和选择硬件设备时,应注意设备的质量和稳定性。
同时,要保证系统能够长时间稳定运行,以便实时监测液体的流速。
2.软件的易用性:设计一个用户友好的界面和操作系统,使医护人员能够方便地使用和操作该系统。
对于不同的用户,可以提供不同的操作模式和权限。
3.数据的存储和分析:系统应具备将数据存储和分析的功能,以便日后查看和分析。
可以将数据存储在本地或者云端,以便随时调取。
4.系统的可拓展性:系统应具备可拓展的功能,比如可以与其他设备进行数据交互、或者可以设置多个液体点滴的监控等。
综上所述,液体点滴速度监控系统是一种用于监测和保障患者安全的设备。
通过选择合适的硬件和软件,进行适当的校准和测试,可以设计出一个高度可靠和准确的液体点滴速度监控系统。
液体点滴测速
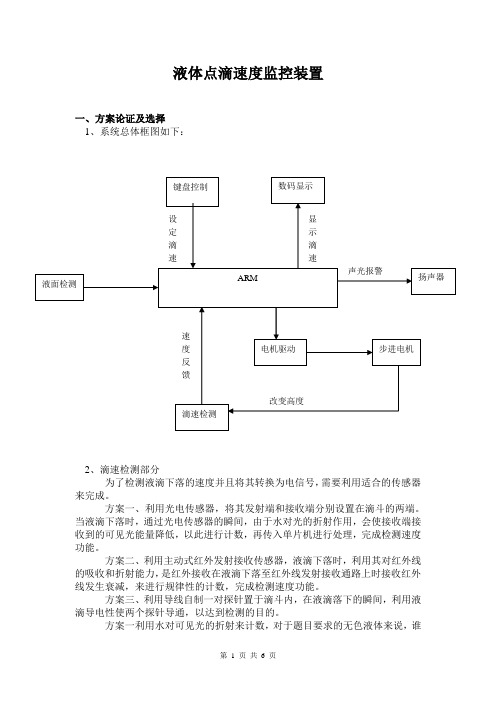
液体点滴速度监控装置一、方案论证及选择1、系统总体框图如下:2、滴速检测部分为了检测液滴下落的速度并且将其转换为电信号,需要利用适合的传感器来完成。
方案一、利用光电传感器,将其发射端和接收端分别设置在滴斗的两端。
当液滴下落时,通过光电传感器的瞬间,由于水对光的折射作用,会使接收端接收到的可见光能量降低,以此进行计数,再传入单片机进行处理,完成检测速度功能。
方案二、利用主动式红外发射接收传感器,液滴下落时,利用其对红外线的吸收和折射能力,是红外接收在液滴下落至红外线发射接收通路上时接收红外线发生衰减,来进行规律性的计数,完成检测速度功能。
方案三、利用导线自制一对探针置于滴斗内,在液滴落下的瞬间,利用液滴导电性使两个探针导通,以达到检测的目的。
方案一利用水对可见光的折射来计数,对于题目要求的无色液体来说,谁对其吸收能力很弱,基本上完全靠折射来工作。
而方案二则是利用水对红外线的吸收和折射作用来计数,有较强的适应性,可以应用于无色液体。
方案三则为有损探测,与前两项无损探测相比,局限较大。
综上,选方案二。
3、速度控制部分控制液滴下落速度主要有两种方法:方案一、通过步进电机和滑轮系统控制储液瓶的高度,来达到控制液滴流速的目的。
方案二、通过控制滴速夹的松紧程度来控制液滴流速。
方案一实现较为简便,通过步进电机可方便地实现储液瓶高度的调节,从而达到控制液滴流速的目的,但缺点是调节储液瓶移动的距离比较大,所需时间比较长,而且储液瓶高度与流速的关系非线性,并且没有现成的公式可以利用,而只能去足够多的采样点,来分析两者之间的关系,得出大致的经验公式。
在自变量(储液瓶移动距离)变化范围较大的情况下,这项工作更为繁杂。
方案二控制滴速夹移动的距离很小,但是滴速夹的松紧调节过程中,移动距离、移动阻力等参数难以计算,用机电系统实现起来较为困难。
综上,我们选择方案一。
4、电机驱动模块方案一、采用集成驱动芯片,再利用单片机驱动。
方案二、采用分立元件构建与集成驱动芯片等效功能的电路,驱动信号较之方案一复杂。
液体点滴速度监控装置设计报告
液体点滴速度监控装置设计报告一、引言液体点滴在医疗领域中广泛应用,用于输液、给药等目的。
监控液体点滴的速度对于保证患者的安全和治疗的有效性至关重要。
为了满足对液体点滴速度进行实时监控的需求,我们设计了一种液体点滴速度监控装置。
二、设计原理三、装置设计1.液位传感器:液位传感器是用于测量液体液位变化的关键组件。
传感器采用了浮球原理,即将一个浮球固定在导轨上,当液位升高时,浮球被抬升,随着液位降低,浮球被下压。
通过浮球的位置变化,可以得到液体的液位变化情况。
2.电子控制单元:电子控制单元包括微控制器、模数转换器和显示屏。
微控制器用于处理传感器的信号,并计算液体点滴的速度。
模数转换器用于将传感器的模拟信号转换为数字信号,供微控制器处理。
显示屏用于实时显示液体点滴的速度。
3.其他组件和接口:装置还需要其他一些组件和接口来支持工作,如电源、按键开关和数据输出接口。
电源用于为整个装置提供电力,按键开关用于启动和停止液体点滴速度监控功能,数据输出接口用于将监控结果输出给其他设备。
四、工作流程1.用户启动装置,并通过按键开关选择开始监控液体点滴速度。
2.液位传感器感知液位的变化,并将模拟信号传递给模数转换器。
3.模数转换器将模拟信号转换为数字信号,传递给微控制器。
4.微控制器根据液位的变化计算出液体点滴的速度,并将结果显示在显示屏上。
5.用户根据显示屏上的速度信息判断液体点滴是否正常,并根据需要进行调整。
五、性能评估1.准确性:液体点滴速度监控装置应具备高精度的液位测量和速度计算能力,以保证监控结果的准确性。
2.稳定性:装置应具备良好的稳定性,能够在各种环境条件下正常工作,不受外界干扰影响。
3.实时性:装置应能够实时监测液体点滴的速度,并将结果及时显示在显示屏上,以满足临床医疗的需求。
六、结论本设计报告介绍了一种液体点滴速度监控装置的设计原理和工作流程。
该装置通过液位传感器和电子控制单元实现对液体点滴速度的实时监控,并通过显示屏将监控结果显示出来。
智能液体点滴监控系统的设计

智能液体点滴监控系统的设计智能液体点滴监控系统的设计摘要:本监控系统采用多机通信,一个主站控制多个从站和主机之间的数据传输,并采用光电技术检测液体点滴的速度。
单片机控制步进电机带动蠕动泵实现对滴速的控制,软件根据检测结果实现对控制电路的自适应调节,通过按键或上位机软件实时设置点滴速度、输液量及床位号,输液结束或输液速度发生异常时,从站使用发光二极管和蜂鸣器报警,并将报警信号通过串行口传送至主站,主站通过监控软件和蜂鸣器实现声光报警。
实验证明本系统具有电路简单、检测精度高、响应速度快等优点。
关键词:红外发射对管;蠕动泵;步进电机;AT89C51;点滴智能液体点滴监控系统主要应用在静脉输液以及化学医学领域实验中需要精确滴定的场合[1]。
本装置可以实现对液体点滴滴速的控制与检测,控制范围为每分钟30~120滴,控制精度为±2滴,还可以在药液不足及输液不畅时自动报警,并停止输液。
1系统总体方案因为医用,所以任何与瓶中液体有接触的设计方案都是不可行的,所有传感器和控制器只能固定于输液的外部。
具体设计方案。
(1)点滴检测:要求系统能够正确及时地探测下落的点滴数。
通过红外发射对管实现对点滴速度的检测。
(2)控制器:实现对传感器输出信号的采集来计算点滴速度,通过对滴速的计算和设置数值的比较来控制电机的转速,从而实现闭环控制。
通过计算输液量来判断输液是否正常。
(3)机械传动控制:包括机械传动和控速,兼顾稳定性、精确性、可操作性、廉价。
(4)实时显示、报警:包括实时显示电路、报警电路和按键电路,兼顾实用性、可操作性、廉价且满足设计要求。
2电路实现2.1滴速测量本设计采用直射式光电传感器(红外对管)来实现点滴速度的检测。
利用一个具有一定硬度且反射性很差的塑料管,把红外对管分别装在两侧,水滴从两管之间通过,有液滴滴下时,下落的水滴对红外光有较强的漫反射、吸收及一定的发散作用,可使接收管导通或截止。
液体点滴速度自动监控系统毕业设计论文
郑州轻院轻工职业学院专科毕业设计(论文)题目液体点滴速度自动系统设计液体点滴速度自动监控系统摘要本设计为液体点滴速度监控装置,实现了对液体点滴速度的检测与控制和储液瓶中液面高度的检测报警,并且动态显示点滴速度,可以通过按键设置液体点滴速度并使用步进电机进行速度控制;为了达到较好的调整稳定度,通过软件实现控制电路的自适应调节;利用软件屏蔽检测中的异常信号;另外实现了多机通信,即一个主机站控制多个从机站和主、从机之间的数据传输。
报警信号通过串行口实现从机到主机的传输,利用发光二极管和蜂鸣器实现主机的声光报警,同时从机使用数码管显示异常信息。
系统以单片机89C51单片机为核心控制器件,有直流电动机为液体点滴速度的控制执行器件,进行液体点滴速度控制。
选择合适的传感器,准确检测出模拟信号是实现本设计的关键所在,串行通讯接口建立了主战与从站的有线监控系统,主机采用VB编写的界面,显示了友好的人机互交界面。
制成了一套简易实用的液体点滴速度监控系统装置。
关键词PID /单片机/点滴速度/光电传感器/多机通信AUTOMATIC CONTROL SYSTEMOF DROPPING RATEOF LIQUIDABSTRACTDesigned for the monitoring mechanism, the implementation rate drops of liquid little speed of the inspection and control and a reservoir of the high level test of the police, and dynamically show, via the keys can be set up a little speed and using step into the motor control tempo ;to achieve better adjust the stability and software for the control circuit to regulate ;used software to detect in shielding of the signal ;achieved much in the communications, Is a host got control over from a machine stops and the lord, from the transmission of data between. the alarm signal by serial port from the implementation of the host of transport, the use of light and a buzzer to host of audible visual type of machine, using digital of information. reflect the abnormal。
输液速度监控器的设计
输液速度监控器的设计首先,一个输液速度监控器应包括以下组件:1.流量传感器:用于检测药液的流速。
传统的流量传感器使用机械式流量计,但这种传感器不够精确,容易受到温度和压力等因素的影响。
因此,我们可以采用电子式流量传感器,它可以通过电磁感应或者超声波技术来实现非接触式测量,提高测量精确度。
2.控制模块:用于计算药液的流速和输液时间。
控制模块应该具备高精度的时钟和计数器,以确保计算结果的准确性。
同时,它还应该具备数据存储和处理功能,以便对输液速度进行记录和分析。
3.显示屏:用于显示药液的流速和输液时间,并向操作人员提供警报信息。
显示屏应具备足够的亮度和清晰度,以便在光线不好的情况下也能清晰可见。
4.警报装置:当输液速度超出安全范围时,警报装置应该及时发出警报信号,以提醒操作人员注意。
警报装置可以使用声音、光线或振动等方式进行警示,以适应不同环境和操作人员需求。
5.电源:输液速度监控器需要一个稳定可靠的电源,以保证设备的正常运行。
通常可以使用可充电电池或者直接接入交流电源进行供电。
在设计输液速度监控器时,还需要考虑以下几个方面:1.界面设计:设备的界面应该简洁明了,操作方便。
可以使用触摸屏或者物理按键进行操作,以满足不同操作习惯和需求。
2.数据处理与记录:监控器应该具备数据存储和处理功能,可以将输液过程中的流速数据进行记录,并进行分析。
可以使用内置存储器或者外接存储卡等方式进行数据的保存。
3.轻便便携:由于输液速度监控器需要随时使用,因此应该设计成便携轻便的形式,方便携带和操作。
4.安全性能:输液速度监控器应具备良好的安全性能,可以检测药液的流速并及时发出警报。
同时,设备应具备防水、防尘和防震等功能,以提高设备的稳定性和耐用性。
5.耗能情况:输液速度监控器应该具备高效节能的特点,以延长设备的使用时间。
在实际应用中,输液速度监控器可以广泛应用于医院、诊所和家庭等多个场景。
它可以帮助医护人员更好地掌握输液过程中药液的流速,提高治疗的准确性和安全性。
液体点滴速度监控系统的设计
毕业设计(论文)液体点滴速度监控系统的设计系别自动化工程系专业自动化班级50603学号5060331姓名刘营营指导教师顾德英教授2010 年 6 月17 日液体点滴速度监控系统的设计摘要随着现代科技的发展,自动化设备已经应用到我们生活中的各个领域,然而传统的医疗输液设备效率较低,因此我们有必要提高医疗设备的自动化水平,给护士输液工作提供方便,给输液病人提供可靠的安全保证。
因此本文本着适用、可靠、操作方便、节省劳力、降低劳动强度、提高操作准确性的原则,利用SPCE061A凌阳单片机组成了一个主从局域网络,实现了对液体点滴速度的自动监测与调节,并能实时监测剩余药液。
该控制系统由水滴速度检测环节、水滴速度控制环节、显示装置、单片机系统、键盘和报警等系统组成。
本文硬件部分用SPCE061A单片机,传感器,直流伺服电动机,键盘,数码管等实现。
软件程序使用C语言与汇编语言共同编写。
通过软硬件的结合,较好的实现了控制系统的控制要求。
此单片机控制系统具有自动化程度高、成本低、体积小、控制精确等优点,有很好的经济效益和广阔的发展前景。
关键词:液体点滴速度,模糊控制,直流伺服电动机,SPCE061A单片机The design for the liquid drop speed monitoring systemAuthor:liuyingyingTutor:gudeyingAbstractWith the development of modern science and technology,automation equipment has bee- n applied in all areas of our lives,however,the devices of traditional medical transfusion are more efficient.Therefore, we need to improve the automation level of medical equipment, to facilitate the work of nurses and provide guarantees that are reliable and security for partients. This article depends on the principle tihat is reliable,easy to operate, saving labor,reducing la- bor intensity and improving the accuracy of operation, formming a master-local area network used by single chip of Sunplus of SPCE061A , which achieve automatic monitoring and regu- lation to the liquid dropping speed and monitoring the remaining liquid constantly.The control system consists of liquid dropping speed detection tache, water dropping speed control tache, display devices, microcontroller systems, keyboard and alarm system. This hardware implem- entation include SPCE061A MCU , sensors, DC servo motors,keyboards, digital tubes and so on. Software program use C language and assembly language co-written.Through a combinat- ion of hardware and software,to achieve a better control of the control system requirements.T- his single chip control system has the merit of high degree of automation, low cost, small size, precise control and so on.The system has good economic and broad prospects for developme- nt.Keywords:liquid dropping speed, sensor,DC servo motor, SPCE061A single chip目录1 绪论 (1)1.1 课题研究背景及意义 (1)1.1.1 课题研究背景 (1)1.1.2 课题研究意义 (2)1.2 凌阳十六位单片机的应用及特点 (2)1.2.1 凌阳单片机总述 (2)1.2.2 凌阳单片机的性能 (3)1.2.3 SPCE061A开发方法 (4)1.2.4 凌阳单片机应用领域 (4)1.3 本文主要讨论的内容及总体安排 (4)2 方案对比与论证 (6)2.1 液体点滴控制系统的总体方案 (6)2.2 方案的对比与确定 (7)2.2.1 从站控制模块 (7)2.2.2 点滴速度检测模块 (8)2.2.3 液位检测模块 (9)2.2.4 电机模块 (9)2.2.5 电机驱动模块 (10)2.2.6 键盘和显示模块 (10)2.2.7 通讯模块 (10)2.2.8 声光报警 (10)2.3 方案算法 (10)2.3.1 闭环系统 (11)2.3.2 算法的选择 (11)2.3.3 模糊控制 (11)3系统硬件设计 (16)3.1 点滴速度检测模块 (16)3.2 储液瓶液位高度检测模块 (16)3.3 电机控制模块 (16)3.4 键盘设置模块 (17)3.5 数码管显示模块 (18)3.6 通讯模块 (19)3.7 声光报警 (19)4系统软件设计 (21)4.1 凌阳单片机的编程环境 (21)4.2 I/O分配 (21)4.3 从站系统程序 (21)4.3.1 从站程序流程图 (21)4.3.2 从站各部分实现方法 (22)4.4 主站系统程序 (28)4.4.1 主站系统性能分析 (28)4.4.2 主站程序流程图 (29)4.4.3 主站各部分实现方法 (29)4.5 软件算法的实现 (30)5实验结果及分析 (33)5.1 测试仪器及环境 (33)5.2 测试方法 (33)5.3 误差产生的原因分析 (34)结论 (35)致谢 (36)参考文献 (37)附录 (38)附录A (38)附录B (51)1 绪论1.1 课题研究背景及意义1.1.1 课题研究背景输液又名打点滴或者挂水。
输液速度监控器的设计

摘要在人工点滴输液方式中,对输液速度的测量和控制很不方便,基于此,提出一种新型智能输液速度测控装置。
该装置采用红外光电传感器实现了自动检测并显示液体的点滴速度、用键盘设定点滴速度和对异常情况进行声光报警等功能。
本系统采用红外光电传感器检测液位信号,通过硬件滤波和保护装置消除杂散光干扰,实现输液速度的计算和显示。
该系统工作稳定、响应速度快、操作简便,在医疗卫生领域中具有广泛的应用前景。
关键词:输液速度;自动控制;单片机;报警AbstractTo overcome the shortages of fluid measurement and speed control of transfusion in the therapy,an intelli-gent speed control system for transfusion is present.The device is the use of infrared photoelectric sensor to achievethe measurement of droplet and the liquid level,and use a total collector capacitance amplifier circuit,filtering circultand hysteresis comparision circuit in order to realize signal processing.The system is able to achieve the fluid speed of calculation and display.As well as forced alarm at the process of transfusion and automatic alarm at the end of transfusion.The main structure is of character novel design and small size easy to operate. the system has the following advantages,such as less power consumption and safe and reliable usage.Key words:infusion rate;Auto-detection and auto-control;single-chip microcomputer;alarm目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 国内外智能点滴输液控制系统的研究现状 (1)1.2 本设计所要完成的主要工作 (1)第2章系统硬件方案的设计 (3)2.1 系统硬件组成 (3)2.2系统部分硬件分析 (3)2.3系统组成模块分析 (7)2.4滴速检测模块 (7)2.4.1液滴探测原理 (7)2.4.2液滴滴速检测电路 (9)2.5液面检测 (11)2.6键盘及显示模块 (11)2.7 步进电机控制模块 (14)2.7.1 步进电机控制电路 (14)2.7.2电机控制的执行结构 (15)2.7.3系统任务调度 (16)2.8报警电路 (16)第3章系统的软件设计与实现 (18)3.1软件总体设计 (18)3.1.1软件计数器的设计 (18)3.2软件各模块的设计 (19)3.2.1键盘识别及扫描模块 (19)3.2.2点滴速度检测模块 (20)3.2.3 报警模块 (21)3.2.4步进电机控制模块 (21)第4章结论 (23)参考文献 (24)结束语 (25)致谢 (26)附录Ⅰ程序清单 (27)附录Ⅱ键盘及显示电路控制图 (35)第1章绪论1.1国内外智能点滴输液控制系统的研究现状国外对智能型输液装置的研制较早,如日本、美国和德国等国家上世纪80年代末就进行了智能型输液装置的研制,现在市场上流行的大多是国外产品,类型多样,性能较好,如日本JMS株式会社的OT-601型输液泵(控制精度为10)和SP-500型注射泵,美国、德国、以色列等国家也有性能较好的产品。
液体点滴速度监控系统的设计
液体点滴速度监控系统的设计引言液体点滴是医院内常见的药物给予方式之一,它通过静脉输液的方式将药物直接注入患者的血液中。
点滴速度的控制非常重要,因为速度过快或过慢都可能对患者的生命安全造成危害。
因此,设计一个液体点滴速度监控系统可以帮助医生和护士实时监控液体点滴的速度,提高患者的安全性。
1.系统需求分析1.1功能需求1.1.1实时监测液体点滴的速度1.1.2发出警报当速度超过预设范围1.1.3记录液体点滴速度的变化趋势1.2性能需求1.2.1监控系统的响应时间应小于1秒1.2.2监控结果的准确性应高于95%1.3可靠性需求1.3.1系统应具备防止数据丢失或损坏的机制1.3.2系统应具备自动备份数据的功能1.4用户界面需求1.4.1界面应简洁易懂1.4.2界面应具备操作简单方便的特点2.系统设计2.1硬件设计2.1.1传感器:使用液位传感器来检测液体点滴的速度,可以采用光电传感器或压力传感器等。
2.1.2控制器:使用单片机或嵌入式开发板作为系统的控制器,负责接收传感器的数据,并根据设定的阈值发出警报。
2.1.3显示器:使用液晶显示器或LED显示屏来显示液体点滴的速度和警报信息。
2.2软件设计2.2.1数据采集:使用传感器采集液体点滴的速度数据,并将其传输给控制器。
2.2.2数据处理:控制器接收到传感器数据后,根据设定的阈值判断液体点滴的速度是否正常,并根据需要发出警报。
2.2.3数据存储:采用数据库或文件系统来存储液体点滴的速度数据,以便日后分析和查询。
2.2.4用户界面:设计一个友好的用户界面,使医生和护士能够实时监控液体点滴的速度和警报信息。
3.系统实施3.1硬件实施3.1.1连接传感器:将传感器与控制器进行连接,确保传感器可以正常传输液体点滴的速度数据。
3.1.2连接显示器:将显示器与控制器进行连接,以显示液体点滴的速度和警报信息。
3.2软件实施3.2.1数据采集程序:编写数据采集程序,在控制器上实时接收和处理传感器的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液体点滴速度监控系统设计摘要:本设计研制了一种液体点滴速度监控系统。
该系统以单片机为核心,可以实现自动检测并显示液体点滴的速度、用键盘设定点滴速度和对异常情况进行声光报警等功能。
采用红外光电传感器检测液位信号,通过硬件滤波和保护装置消除杂散光干扰。
并能通过上位机与下位机之间的串行通信,实现对多台下位机进行远程监控与管理。
该系统工作稳定、操作简便,能有效的解决目前简易液体点滴装置和输液泵之间的空缺,在医疗卫生领域中具有广泛的应用前景。
关键词:点滴速度,单片机,串行通信,步进电机Abstract:The monitoring system for the transfusion was developed with microcontroller unit used as a core. The system realizes auto detection and display of the drip velocity. The drip velocity can be set by keyboard and the abnormal event alarm has achieved. The signal of the liquid level was detected by the infrared photoelectric sensor, and the interference of abnormal light was eliminated by the hardware filter and the protect device. In addition, the remote monitoring and managing of several lower computers was achieved by serial communication. The system is stable in performance and simple in operation. The system has bright application future in medical treatment field.Keywords:Dropping speed, Microcontroller unit, Serial communication, Stepping motor目录1前言 (1)1.1 设计背景 (1)1.2 设计目标 (1)1.3 技术路线 (1)1.4 实施计划 (2)1.5 必备条件 (2)2总体方案设计 (3)2.1 方案比较 (4)2.1.1 滴速检测方案 (4)2.1.2 液位检测方案 (4)2.1.3 滴速控制方案 (4)2.1.4 电机选择方案 (5)2.1.5 点滴速度计算方案 (5)3单元模块设计 (7)3.1 各单元模块功能介绍及电路设计 (7)3.1.1 滴速检测模块设计 (7)3.1.2 液位检测模块设计 (7)3.1.3 电机驱动模块设计 (8)3.1.4 声光报警模块设计 (10)3.1.5 键盘模块设计 (10)3.1.6 显示模块设计 (11)3.1.7 通信模块设计 (12)3.1.8 中央控制模块设计 (13)3.1.9 电源模块设计 (14)3.2 电路参数的计算及元器件的选择 (14)3.2.1 时钟电路 (15)3.2.2 复位电路 (15)3.3 功能器件的介绍 (15)3.3.1 AT89C51介绍 (16)3.3.2 8255A介绍 (18)4软件设计 (24)4.1 软件设计所用工具 (24)4.2 软件结构图 (24)4.3 软件流程框图 (25)4.3.1 上位机软件流程框图 (25)4.3.2 下位机软件流程框图 (26)4.3.3 上、下位机通信软件流程框图 (28)5系统调试 (31)6系统功能、指标参数 (38)6.1 系统能实现的功能 (38)6.2 系统指标参数测试 (38)6.2.1 点滴速度测试 (38)6.2.2 报警功能测试 (39)6.3 系统功能及指标参数分析 (39)7结论 (40)8总结与体会 (42)9谢辞 (43)10参考文献 (44)附1 系统的原理电路图 (45)附2 外文文献翻译-译文 (46)附3 外文文献翻译-原文 (56)1前言随着医院管理系统趋向于电子化、网络化,利用单片机与现代控制技术提高医疗器械的自动化程度成为目前主要应用方向之一。
本课题所要设计的液体点滴速度监控装置,正是在医疗设备自动化的背景下,为了满足患者和医院的需要而设计的。
1.1 设计背景静脉输液是临床医学中一个重要的治疗手段,但长期以来一直没有有效的自动监测装置,从而需要专人监护,加重了护理人员的劳动负担,也不利于病区的综合管理。
目前医院使用的点滴输液装置是将液体容器挂在一定高度上,利用势差将液体输入到病人的体内,通过软管夹对胶管口径的压紧和放松来控制滴速,其输液速度几乎全部都是一个不精确的值。
有经验的医护人员可以根据药剂的特性对滴速进行控制,而一般的病人却无法做到,做的不好会有一定的危险性。
而采用输液泵是解决输液速度的一种有效方法,但它机器成本和耗材成本太高,只适用于急救和重症情况。
因此对于可进行自助式护理的病人来说,需要一种可以由病人自己操作,可控制滴速的智能型液体点滴速度监控装置,但同时该装置要能接受医护人员的监管,以便更正病人不正确的设定。
1.2 设计目标系统应用自动化控制技术实现了对液体点滴速度的监控,可根据需要设置点滴速度,并对异常情况进行声光报警。
医护人员也可以通过远程通信,监控病人输液的整个过程,并对液滴速度进行设置,减轻护士的工作量,实现医院护理自动化。
系统所要实现的主要功能有:⑴设定点滴速度;⑵控制点滴速度并实时显示;⑶对液位过低或滴速异常进行声光报警;⑷打印记录详单;⑸实现上位机和下位机的串行通信。
1.3 技术路线本设计的技术路线如下:1、对设计中相关的核心器件AT89C51、8255A、步进电机和技术知识进行研究,提出多种技术方案;2、对所提方案进行论证和比较,以确定最终采用的方案;3、进行系统硬件电路的模块化设计;4、进行具体的模块电路设计;5、进行相关软件设计和编程;6、进行系统的综合测试和调试工作。
1.4 实施计划3月下旬至4月初,查阅和收集文献资料;4月初至4月中旬,提出设计方案,并对方案进行比较和论证,选出最佳方案;4月下旬至5月初,完成硬件电路设计;5月初至5月中旬,完成相关软件编程;5月下旬,进行系统的模拟测试;5月底至6月上旬,撰写设计报告,并准备毕业设计答辩。
1.5 必备条件硬件:计算机、单片机仿真器等。
软件:Proteus、Multisim、Word等。
2总体方案设计根据设计要求,上位机和下位机的系统框图如图2-1和图2-2所示,上、下位机通信系统结构图如图2-3所示。
图2-1 上位机系统框图图2-2 下位机系统框图图2-3 上、下位机通信系统结构图上位机置于护士站,下位机置于病房,通信模块实现的是这两个部分的联接。
上位机即为下位机除去滴速检测、液位检测、电机驱动、详单打印这四个部分。
所以本设计说明书部分可只对下位机部分进行说明。
2.1 方案比较通过查阅相关技术资料,结合自己的实际知识,并请教老师之后,针对各个单元模块提出了不同的技术方案来实现所需功能。
下面将对各个单元模块的多种实现方案进行说明,并分析比较它们各自的特点,选择最合适的方案来完成本设计。
2.1.1 滴速检测方案方案一:采用压力传感器来实现。
在受液瓶下加一压力传感器,通过感知其压力大小来判断是否有液滴落下。
方案二:采用液位传感器来检测。
将一液位传感器置于受液瓶中,根据液位传感器感受到的液位起伏来检测是否有液滴滴下。
方案三:采用红外对管实现,根据接受到的光强的强弱判断是否有液滴滴下。
综合分析,滴管滴出20点蒸馏水相当于1ml±0.1ml。
因此,液滴的质量约为0.05g,对压力传感器的要求很高,故方案一不可取。
本设计涉及医用,任何与瓶中液体有接触的设计方案都是不可行的,所有探测器、传感器只能固定于瓶的外壁,并且输液瓶的晃动会引起测量的误差,故方案二不可取。
方案三成本低,电路简单,且不受可见光的干扰,稳定性好,测量相邻点滴下落的时间间隔即可确定点滴速度。
因此,综合比较后采用方案三。
2.1.2 液位检测方案方案一:同点滴检测模块,采用红外对管实现,根据接收管接收到的光强大小来判断是否到达警戒线。
方案二:采用电容传感器来检测。
在储液瓶的瓶身外贴两块金属薄片作为传感电容,储液面下降,电容两极间的介电常数减小,传感电容的电容值减小,再经过电容/电压变换器转换为电压值。
经比较,方案一器件简单,软硬件也都相对较容易实现。
方案二虽然简单,但由于不同的药液可能有不同的电容值,而且为了使电容量的变化比较明显,瓶身外的金属薄片应该比较大,影响对液面的肉眼观察,所以不太适于医学使用。
因此采用方案一。
2.1.3 滴速控制方案方案一:通过电机和滑轮系统控制储液瓶的高度,来达到控制液滴流速的目的。
方案二:通过电机控制滴速夹的松紧程度来控制液滴流速。
综合分析,方案一实现较为简便,通过电机可方便地实现对储液瓶高度的调节,从而达到控制液滴流速的目的,但缺点是调节储液瓶移动的的距离比较大,所需时间比较长,而且储液瓶高度与流速的关系并没有现成的理论公式可以利用,而只能取足够多的采样点,来分析两者之间的关系,得出大致的经验公式。
方案二控制滴速夹移动的距离很小,调整比较迅速,但是在控制较慢的滴速时容易使塑料软管夹得过紧而变形,从而使滴速由慢向快调整时时间过长。
综合比较,采用方案一。
速度控制方案示意图如图2-4所示。
图2-4 速度控制方案2.1.4 电机选择方案方案一:采用直流电机。
方案二:采用步进电机,在较为精确的定位性能方面十分优越。
由于方案一采用的直流电机通电即转动,掉电后惯性较大,停机时还会转动一定角度后才可停下来,且直流电机转矩小、无抱死功能,如果要求准确停在一个位置,实现难度比较大。
方案二中步进电机转矩相对直流电机大,控制精度较高,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
经比较,采用方案二。
2.1.5 点滴速度计算方案滴速测量的原理是单片机通过一定时间内红外传感器测得的脉冲信号计数得到滴速。
方案一:根据一定时间T (如10秒)内滴下的点滴的滴数n 计算点滴的滴速,计算公式为:Tn v 60=(滴/分) 方案二:根据相邻滴液所间隔的时间t 计算点滴的速度,计算公式为601⨯tV =(滴/分) 分析比较,方案一若选取的计数时间T 较短,以10秒为例,如检测系统误差为1滴,则计算得出的速度误差为6滴,此时假设点滴的实际速度为30滴/分,而计算速度为36滴/分,误差为20%,误差太大。