设计运算功能块
plc积分运算功能块

plc积分运算功能块
在PLC(可编程逻辑控制器)中,积分运算功能块用于对输入信号进行积分处理,通常用于控制系统中需要积分计算的应用。
下面是一种常见的PLC中的积分运算功能块实现方法:
1.确定采样周期:首先需要确定积分计算的采样周期,即每隔多长时间进行一次积分计算。
根据具体应用需求,可以选择合适的采样周期。
2.初始化:在PLC程序中,初始化一个变量用于存储积分结果,一般命名为integral(积分结果)或accumulator(累加器),并将其初始值设置为0。
3.读取输入信号:根据采样周期,周期性地读取输入信号的数值。
可以使用计时器或定时器来实现定时读取。
4.积分计算:将每次读取到的输入信号值累加到积分结果变量中。
积分计算的方法可以是简单的累加,即每次将当前输入信号值加到积分结果中。
例如:
integral = integral + input;
5.输出结果:根据应用需求,将积分结果用于控制或其他操作。
可以将积分结果作为输出信号,或在后续步骤中进行进一步的处理。
需要注意的是,积分计算是一个持续的过程,每个采样周期都会进行一次积分计算。
同时,由于PLC的处理速度有限,采样周期不能过短,否则可能会导致积分结果不准确或计算超时。
此外,不同的PLC品牌和型号可能有不同的积分运算功能块实现方法,具体的操作和参数设置可能会有所差异。
因此,在实际应用中,请参考相应PLC的用户手册或编程指南,以了解具体的积分运算功能块的使用方法和参数设置。
现场总线功能块的建模与分析
现场总线功能块的建模与分析本文旨在研究现场总线功能块的建模和分析方法。
首先,进行功能块的概念定义,讨论现场总线功能块的基本构成和功能,并介绍它的建模工具和过程。
其次,分析现场总线功能块的可靠性要求,以及可靠性的测量方法和指标。
最后,介绍基于总线的系统设计中的一些实现方法,包括系统结构设计、硬件/软件设计以及现场总线功能块中故障保护和失效预测技术。
现场总线功能块的建模与分析1.能块的概念定义及基本构成现场总线功能块(Function Block)是一种特定功能,用于结构化自动化系统控制中的一种元件。
它以结构化化、可重复使用的形式实现对自动化系统核心功能的实施,既不断积累系统的专业知识,又支持代码的可重复使用,从而简化系统设计,提高设计质量。
现场总线功能块主要包括控制功能块、运算功能块和通信功能块三大类。
控制块为系统提供实时控制功能,控制块可以是控制结构算法,如梯形控制、PID控制、状态机等;运算功能块,则可以提供实时数据处理功能,主要用于实时数据的统计、分析、滤波和运算;通信功能块用于实现现场设备与总线之间的通信,包括现场总线接口卡、现场总线终端电路板及相关的软件驱动等。
2.能块建模工具及过程建模是指通过将实际系统建模为一种抽象模型,以便它能够表达和描述系统控制和运算过程,便于理解和控制。
目前,现场总线功能块建模主要采用PLC、SFC、Petri网等技术。
PLC技术是封装在单个芯片或整体系统上的程序控制器技术,它可以直接与复杂的运动控制系统进行图形化的编程,也可以用于简单的控制功能建模;SFC技术是基于面向对象技术,是构建物理系统的抽象模型;Petri网是一种分布式模型,它用来表达运行过程中的活动与状态。
3.能块的可靠性现场总线功能块的可靠性是系统的一个重要指标,它可以确保系统功能块能够在任何环境下正常工作。
常见的可靠性测量方法有熵等值测量、可靠性分析和系统安全性测试。
熵等值测量是对功能块工作状态和运行情况进行熵变换,以确定其功能及其稳定性;可靠性分析则是通过可靠性分析工具、MTBF可靠性分析和元件可靠性分析等方式进行;系统安全性测试则是利用异常检测算法、故障树分析等方式,通过模拟技术提供的模型,分析功能块系统在不同环境工况下的安全性。
SAMA图设计功能块

HOLLiAS-MACS TM杭州和利时自动化有限公司电厂自动化事业部-1-一、 信号的输入、输出1、模拟量输入上方为信号名称和KKS 编号,左下方圆圈为坏质量逻辑信号输出及坏质量信号编号。
2、模拟量输出下方为信号名称和KKS 编号。
3、内部联络信号输入或输出用于本设备逻辑信号连接,圆圈内为模拟量或开关量信号编号,左方或右方为该信号的描述,上方或下方表示来自或到本设备的第几张逻辑图。
4、模拟量输入用于与其它设备模拟量信号连接,上方为该信号的名称, 来自那一张逻辑图,第几页,共几页,圆圈内表示在其它设备的逻辑图中的编号。
HOLLiAS-MACS TM杭州和利时自动化有限公司电厂自动化事业部-2-5、模拟量输出上方为信号名称和KKS 编号,左 下方圆圈为坏质量逻辑信号输出及坏 质量信号编号。
6、开关量信号输或输出方框内为开关量信号名称,方框下方为该信号的KKS 编号,当用做与其它设备的逻辑联络信时,则下方表示来自或到那一张逻辑图,第几页。
共几页。
7、报警信号HOLLiAS-MACS TM杭州和利时自动化有限公司电厂自动化事业部-3-二、 开关量功能处理模块1、或(OR )输入全为“0”状态时,输出为“0”,任意一个或以上输入为“1”时,输出为“1”状态。
2、与(AND )输入全为“1”状态时,输出为“1”,任意一个或以上输入为“0”时,输出为“0”状态。
3、非(NOT )当输入为“0”状态时,输出为“1”, 当输入为“1”时,输出为“0”状态。
4、RS 触发器当激励端输入(S)为“1”状态时,输出(Q)为“1”, 此时如激励端输入“1”消失,输出“1”状态仍然保持, 直到复位端输入(R)为“1”状态时,输出(Q)才为“0”。
输出(Q)的状态与输出(Q)正好相反。
复位端输入优先与激励端输入,即当输入(S)和(R)同时为“1” 时,输出为“0”状态。
HOLLiAS-MACS TM杭州和利时自动化有限公司电厂自动化事业部-4-5、TON (延时闭合)当输入从“0”状态变成“1”时,输出经过设定的?s 才从“0”状态变为“1”,当输入从“1”变为“0”时, 输出立刻变为“0”状态。
S7-300_400编程功能块图(FBD)参考手册

s附录 SIMATIC用于S7-300和S7-400的 功能块图(FBD)编程参考手册2007年8月版 A5E01112994-01版权所有 © Siemens AG 2004 保留所有权利未经明确的书面许可,不得复制、传播或使用本手册或所含内容。
违者应对造成的损失承担责任。
保留所有权利,包括实用新型或设计的专利许可权及注册权。
Siemens AGBereich Automation and DrivesGeschaeftsgebiet Industrial Automation SystemsPostfach 4848, D- 90327 Nuernberg 免责声明我们已检查过本手册中的内容与所描述的硬件和软件相符。
由于差错在所难免,我们不能保证完全一致。
我们会定期审查本手册中的内容,并在后续版本中进行必要的更正。
欢迎提出改进意见。
©Siemens 2004技术数据如有改动,恕不另行通知。
安全指南本手册包括了保证人身安全与保护本产品及连接的设备所应遵守的注意事项。
这些注意事项在手册中均以下列符号加以突出,并根据危险等级标明如下:危险表示如果不采取适当的预防措施,将导致死亡、严重的人身伤害或财产损失。
警告表示如果不采取适当的预防措施,可能导致死亡、严重的人身伤害或财产损失。
当心表示如果不采取适当的预防措施,可能导致轻微的人身伤害。
当心表示如果不采取适当的预防措施,可能导致财产损失。
须知提醒您注意有关产品、产品使用的特别重要的信息,或者是文档的特定部分。
合格人员只有合格人员才允许安装和操作该设备。
合格人员是指被授权按照既定安全惯例和标准,对线路、设备和系统进行调试、接地和标记的人员。
正确使用请注意如下事项:警告该设备及其部件只能用于产品目录或技术说明书中所描述的范畴,并且只能与由西门子公司认可或推荐的第三方厂商提供的设备或部件一起使用。
只有正确地运输、保管、设置和安装本产品,并且按照推荐的方式操作和维护,产品才能正常、安全地运行。
功能块概念规范

11
GB/T 21099的本部分考虑了如下因素来规定功能块(FB):
a)设备模型定义了本部分一致的设备组件;
b)用于测量、执行和处理的FB概念性规范。它包括了用于支持控制的本质特征的一般规则,以避免了阻碍创新的细节,以及避免不同工业领域专业化的细节。
本部分仅定义了GB/T 21099.1的一个子集,而GB/T 21099.1描述了分布式系统的系统方面的总论。
电子设备描述语言(
用于描述自动化系统组件参数的方法。
电子设备描述(
含设备参数、相关性、图形表示、和被传送数据集的描述的一种数据集合。
注:用电子设备描述语言(EDDL)来创建电子设备描述。
实体
特定的事物,如:一个人、地点、过程、对象、概念、联系或事件。
[GB/T19769.1-××××,定义3.32]
GB/T 9387.1-1998信息技术开放系统互连基本参考模型第1部分:基本模型(ISO/IEC 7498-1:1994,IDT)
GB/T 15969.3-2005可编程序控制器第3部分:编程语言(IEC 61131-3:2003,IDT)
GB/T 19769.1-××××功能块第1部分:结构(IEC 61499-1:2005,IDT)
数据连接
为了传递数据,在两个功能块之间的联系。
[GB/T19769.1-××××,定义3.25]
数据输入
从数据连接接收数据的功能块接口。
[GB/T19769.1-××××,定义3.26]
数据输出
提供数据给数据连接的功能块接口。
[GB/T19769.1-××××,定义3.27]
数据类型
一种已定义的数据对象集。
图2可分布于设备之间的FB结构
功能块说明DOC
HPCS-3000分布控制器算法功能块说明文档Version 1.0.11上海华文自动化系统工程有限公司前言文档内容本文是华文HPCS-3000系列产品文档的一部分,主要给出该系列中各种控制器所含功能块的详细设计资料。
对每种功能块,文档会说明以下内容:说明部分说明内容名称功能块的名称,和在功能块图中的标记名结构功能块每个输入输出信号的含义和作用描述说明功能和用途实用例实际使用中的常见连接方式特殊说明列出功能块使用中必须注意的问题目录1实数运算 (1)1.1FADD二输入浮点加法 (1)1.2FSUB二输入浮点减法 (2)1.3FMUL二输入浮点乘法 (3)1.4FDIV二输入浮点除法 (3)1.5EXP指数运算 (4)1.6LOG对数运算 (5)1.7ABS取绝对值 (5)1.8SQR取平方根 (6)1.9RND随机函数 (6)1.10SIN正弦函数 (7)1.11COS余弦函数 (7)1.12TAN正切函数 (8)1.13ATN反正切函数 (8)1.14PLOYNOM五次多项式 (9)1.15SUM8八输入数学统计器 (10)1.16CMP数值比较 (11)2整数运算 (12)2.1WADD整数加法 (12)2.2WMUL整数乘法 (13)2.3WDIV整数除法 (14)2.4MOD取模运算 (14)2.5WAND整数与运算 (15)2.6WOR整数或运算 (16)2.7WXOR整数异或运算 (16)2.8WNOT整数求反运算 (17)2.9WCMP整数比较 (17)3布尔运算 (19)3.1AND逻辑与 (19)3.2OR逻辑或 (20)3.3XOR逻辑异或 (20)3.4NOT逻辑非 (21)3.5EDGE边沿检测 (21)3.6UEDG上升沿检测 (21)3.7DEDG下降沿检测 (22)3.8SET置1 (22)3.9RESET置0(复位) (23)3.10RS触发器 (23)4类型转换 (25)4.2B16TOW16位逻辑组合 (26)4.3WTOF整数转实数 (27)4.4FTOW实数转整数 (27)4.5WTOBCD整数转BCD码 (28)4.6BCDTOW BCD码转整数 (28)5信号控制 (29)5.1TON延时合 (29)5.2TOFF延时断 (30)5.3PULSE脉冲 (31)5.4XPULSE定时脉冲 (31)5.5CTU递增计数器 (32)5.6CTD递减计数器 (33)5.7COUNT增减计数器 (33)5.8SQUAR方波发生器 (34)5.9SGN信号发生器 (35)5.10PSUM脉冲量累加器 (36)6过程处理 (37)6.1EPID偏差PID控制 (37)6.2ERV偏差计算 (39)6.3LDLG超前滞后 (40)6.4INTG积分运算 (41)6.5DIFF微分运算 (42)6.6FILTER三阶滤波 (42)6.7TWOSEL信号二选一 (43)6.8THRSEL信号三选一 (44)6.9SFT无扰动切换 (45)6.10LIMIT幅度限制 (46)6.11LMTV变化速率限制 (46)6.12BALANCE2二输出平衡模块 (47)6.13MLINE分段线性转换 (48)6.14TSUM时域统计模块 (49)6.15TSUMD时域开关量统计模块 (50)6.16DELAY滞后模块 (50)7设备操作功能 (52)7.1DMA数字软手操 (52)7.2SMA模拟软手操 (53)7.3INTKEY44键互锁开关 (54)7.4TWOPOS两位位置控制 (55)7.5DEV1单向设备控制 (56)7.6DEV2双向设备控制 (57)7.7STEP步序控制 (59)7.9MDIG开关量组合逻辑 (62)7.10SSA模拟伺服放大器 (63)8特殊算法 (65)8.1TQ信号质量 (65)8.2SA VE数据存盘 (66)8.3EQU实数赋值 (67)8.4WEQU条件赋值 (67)8.5EXEC过程跳转 (68)8.6PTC热力性质计算 (68)9DEH功能块 (70)9.1SPO软件脉冲输出 (70)9.2DDS数字驱动伺服模块 (71)9.3DSFT开关量选择模块 (72)9.4KBML键盘模拟量增减 (72)9.5ES/MA模拟量软手操器 (73)9.6F(T)12段信号发生器 (75)9.7QOR88输入开关量处理 (76)10附录 (77)10.1控制器状态说明 (77)10.2控制器网络状态说明 (77)10.3控制柜中的卡件状态说明 (78)10.4状态变量的掩码说明 (78)10.5强制功能说明 (79)10.6查询功能说明 (79)10.7控制器组态注意事项说明 (80)10.8网络时钟设置说明 (81)1实数运算介绍该类算法主要是涉及到实数的一些运算功能块,可以利用运算功能块构成特定的表达式或实现某种算法。
台达plc功能块
台达plc功能块【原创实用版】目录1.台达 PLC 的功能块概述2.台达 PLC 的功能块分类3.台达 PLC 的功能块应用案例4.台达 PLC 的功能块优势5.台达 PLC 功能块的发展前景正文一、台达 PLC 的功能块概述台达 PLC(可编程逻辑控制器)是一种专门为工业自动化领域设计的电子装置,用于实现数字运算操作。
它采用可编程存储器,内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等指令。
通过数字式或模拟式的输入和输出,台达 PLC 可以控制各种类型的机械或生产过程。
二、台达 PLC 的功能块分类台达 PLC 的功能块主要分为以下几类:1.输入功能块:用于接收外部输入信号,如传感器信号等。
2.输出功能块:用于控制外部设备,如电机、阀门等。
3.运算功能块:用于实现各种算术运算,如加法、减法、乘法、除法等。
4.逻辑运算功能块:用于实现逻辑运算,如与、或、非等。
5.定时功能块:用于实现定时操作,如计时、延时等。
6.计数功能块:用于实现计数操作,如计数器、累加器等。
三、台达 PLC 的功能块应用案例台达 PLC 广泛应用于各种工业自动化控制系统中,例如:1.流水线控制系统:通过台达 PLC 实现对流水线上各个设备的自动控制。
2.机器人控制系统:通过台达 PLC 实现对机器人的精确控制。
3.楼宇自控系统:通过台达 PLC 实现对楼宇内照明、空调、电梯等设备的自动控制。
4.环保设备控制系统:通过台达 PLC 实现对废水处理、废气处理等环保设备的自动控制。
四、台达 PLC 的功能块优势1.可编程性强:台达 PLC 的功能块可以根据用户需求进行灵活配置,满足各种应用场景的需求。
2.稳定性高:台达 PLC 采用先进的技术,具有良好的抗干扰能力和稳定性。
3.扩展性强:台达 PLC 可以通过扩展模块实现输入输出点的增加,满足系统扩展的需求。
4.通信便捷:台达 PLC 支持多种通信协议,便于与其他设备进行数据交换和信息共享。
欧姆龙PLC功能块的制作与应用教学内容
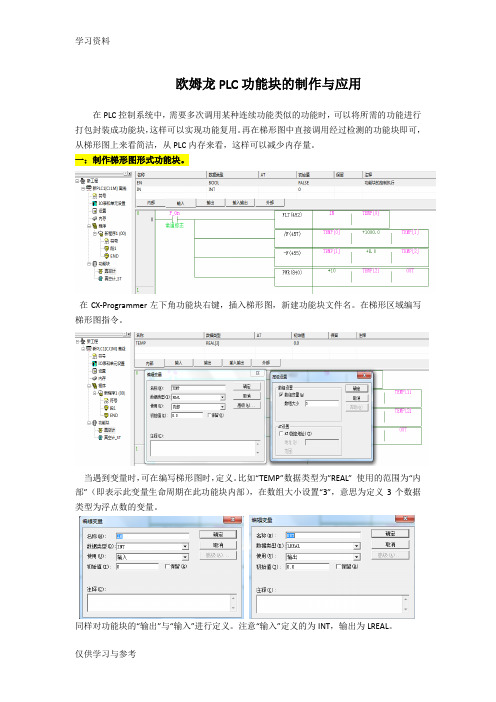
欧姆龙PLC功能块的制作与应用在PLC控制系统中,需要多次调用某种连续功能类似的功能时,可以将所需的功能进行打包封装成功能块,这样可以实现功能复用。
再在梯形图中直接调用经过检测的功能块即可,从梯形图上来看简洁,从PLC内存来看,这样可以减少内存量。
一:制作梯形图形式功能块。
在CX-Programmer左下角功能块右键,插入梯形图,新建功能块文件名。
在梯形区域编写梯形图指令。
当遇到变量时,可在编写梯形图时,定义。
比如“TEMP”数据类型为”REAL” 使用的范围为“内部”(即表示此变量生命周期在此功能块内部),在数组大小设置“3”,意思为定义3个数据类型为浮点数的变量。
同样对功能块的“输出”与“输入”进行定义。
注意“输入”定义的为INT,输出为LREAL。
二:制作ST文本形式功能块。
同样在功能块插入选择ST文本。
按照ST文本的编写规则编写ST代码,本次包含算法为将整数转换为浮点数再进行浮点四则运算之后执行指数幂操作,最后再将原运算后的长浮点数转换为普通浮点数。
因为此运算简单,无需定义内部变量,只需要定义输入与输出端口即可。
注意此处将OUT 定义为REAL(普通浮点数)。
三:执行编译命令。
在编写完梯形图形式功能块与ST文本形式功能块后,需执行编译命令,来看查编写的功能块是否存在语句错误或者指令错误。
比如此文本因为将原长浮点数转换为普通浮点数,将会影响到数据的精确度,所以在编译结果中就已提示为“警告”。
当编译存在“错误”时,需重要检查功能块,警告只是作为一种提醒,对功能块不影响。
四:循环段中插入功能块。
1:段1插入的为使用梯形图形式的功能块;2:段2插入的为使用ST文本形式的功能块;3:段3为直接在梯形图中使用指令来实现功能块内部的算法;4:段4分别将梯形图功能块与ST文本功能块产生的结果与直接用指令运算产生的结果进行比较。
从而可以判断三者运算后的结果一致性。
指令解析:FLT:将二进制转换为浮点数,为后面的浮点运算作准备;/F :浮点数除法;-F :浮点数减法;PWR:执行指定数据的指数次方(幂操作)。
FBD功能块语言

FBD功能块语言FBD基于构造图形块的方法,每个图形块代表一个功能单元。
这些图形块可以表示简单逻辑、运算、数据存储、输入/输出等功能。
通过将这些功能块连接起来,可以形成一个控制系统的完整图示。
FBD语言具有以下一些功能块:1. 输入和输出功能块(I/O Block):用于表示输入和输出设备。
例如,传感器可以用输入功能块表示,执行器可以用输出功能块表示。
2. 逻辑功能块(Logic Block):用于表示逻辑运算,包括与门、或门、非门等。
这些功能块可以进行布尔逻辑运算来判断程序的执行流程。
3. 运算功能块(Math Block):用于表示数学运算,例如加法、减法、乘法、除法等。
这些功能块可以对数据进行处理和转换。
4. 计时和计数功能块(Timer/Counter Block):用于表示计时和计数操作。
计时功能块可以用来控制特定事件的时间延迟,计数功能块可以用来计数特定事件的次数。
5. 存储功能块(Memory Block):用于表示数据存储器。
可以使用存储功能块来保存和读取程序中的变量。
6. 算法功能块(Algorithm Block):用于表示复杂的算法。
例如PID控制算法、滤波算法等。
这些功能块可以提供更高级别的控制运算。
7. 用户定义功能块(User-Defined Block):允许用户根据自己的需求定义自己的功能块。
这样,用户就可以根据自己的应用程序要求创建自己的功能块。
FBD语言的优点有:1.图形化表示:FBD语言使用图形化表示,使得程序更直观,易于理解和调试。
2.可重用性:FBD语言中的功能块可以被重复使用,使得代码更加模块化和可维护。
3.安全性:FBD语言具有对数据的类型和取值范围进行验证的能力,可以防止不正确的数据输入和输出。
4.灵活性:FBD语言可以与其他编程语言(如结构化文本语言)结合使用,以满足不同的程序需求。
5.跨平台:FBD语言是一种国际标准,可以在不同的平台上使用。
总的来说,FBD语言是一种功能强大、灵活性高的图形化编程语言。
plc功能块
plc功能块PLC(可编程逻辑控制器)是一种数字计算设备,用于控制工业过程中的机械和电气设备。
PLC功能块是PLC编程中的一个重要部分,用于实现特定的功能或任务。
以下是PLC功能块的一些常见功能和用途:1. 逻辑控制功能块:包括AND、OR、NOT等逻辑运算功能块,用于控制输入信号的逻辑关系,实现特定的控制逻辑。
2. 数值处理功能块:用于进行数值计算和处理,包括加、减、乘、除等基本算术运算功能块,也包括其他数值处理功能块,如求平方根、取余数等。
3. 计时器和计数器功能块:用于实现定时和计数功能,包括On-delay定时器、Off-delay定时器、累计计数器、加/减计数器等。
4. PID控制功能块:用于实现PID(比例-积分-微分)控制算法,用于对温度、压力、流量等工艺参数进行精确控制。
5. 运动控制功能块:用于控制运动设备,如电机、执行器等,实现位置控制、速度控制、加速度控制等。
6. 通信功能块:用于与其他设备或系统进行通信,包括Modbus通信功能块、以太网通信功能块、串口通信功能块等。
7. 故障检测和报警功能块:用于检测设备故障和异常状态,发出报警信号或执行相应的故障处理程序。
8. 数据存储和读取功能块:用于存储和读取数据,包括存储器功能块、数据寄存器功能块等。
9. 数据转换和处理功能块:用于进行数据格式转换和处理,如BCD码转换功能块、ASCII码转换功能块等。
10. 定时任务功能块:用于按照预定的时间间隔执行特定的任务,如扫描功能块、定时触发功能块等。
这只是PLC功能块的一部分示例,实际应用中还可以根据具体需求进行定制开发。
PLC功能块的灵活性和可编程性使得PLC成为工业自动化控制的重要工具,广泛应用于各种行业和领域。
功能块介绍
CENTUM VP功能块介绍-------CACUL
float M1,M2,M3,M4 alias TB BDSET.DT01 alias PB BDSET.DT02 M1=(RV2+101.325)*(TB+273.15) M2=(PB+101.325)*(RV1+273.15) M3=M1/M2 M4=SQRT(M3) CPV=RV*M4
CENTUM VP功能块介绍-------ST16
如下图所示,顺控表分为:条件、动作、-----ST16
条件:
条件部分需要写明触发的<位号.数据项><数据><Y/N>
示例:
CENTUM VP功能块介绍-------CACUL
练习2: 根据液位LI0001调节下列4个阀门
开度 XV0001A XV0001B XV0001C XV0001D 0~25% 开 开 开 开 25~50% 关 开 开 开 50~75% 关 关 开 开 75~100 % 关 关 关 开
CENTUM VP功能块介绍-------CACUL
算数运算
符号 + * / mod
功能
加
减
乘
除
取余
关系运算符
符号 功能 < 小于 > 大于 <= 小于等于 >= 大于等于 == <> 等于 不等于
CENTUM VP功能块介绍-------CACUL
逻辑运算符
符号 and or not eor & | ^
欧姆龙PLC功能块的制作与应用
欧姆龙PLC功能块的制作与应用欧姆龙PLC(Programmable Logic Controller,可编程逻辑控制器)是一种广泛应用于自动化控制系统中的电子设备。
它能通过编程来实现对各种设备和机器的逻辑运算和控制,用于实现自动化生产和操作过程。
为了更好地理解欧姆龙PLC功能块的制作与应用,下面将详细介绍。
首先,制作欧姆龙PLC功能块的过程是通过PLC编程软件进行的。
PLC编程软件通常提供了一个图形化界面,在界面上可以用图形符号表示不同的功能块。
通过将这些功能块按照逻辑关系连接起来,就可以实现对设备和机器的控制。
欧姆龙的PLC编程软件通常是CX-Programmer,具有易于学习和使用的特点。
制作欧姆龙PLC功能块的过程通常可以分为以下几个步骤:1.确定功能需求:首先需要明确所需的功能和逻辑关系。
比如,在自动化生产线上控制一个机器的启动和停止,需要确定哪些条件触发机器启动和停止的逻辑关系。
2.设计功能块:根据功能需求,设计相应的PLC功能块。
PLC功能块通常由输入、输出和中间变量组成。
输入变量是接收外部信号的触发条件,输出变量用于控制设备和机器的启停,中间变量用于实现逻辑运算和存储临时数据。
3.连接功能块:将设计好的功能块按照逻辑关系连接起来。
通常可以使用连线将一个功能块的输出与另一个功能块的输入相连接,以实现信号传递和逻辑关系。
4.编写逻辑程序:在连接好功能块之后,需要编写逻辑程序来实现功能。
逻辑程序通常由一系列的指令组成,这些指令用于控制输入和输出变量的状态,以及执行逻辑运算和判断条件。
5.调试和测试:完成逻辑程序编写后,需要对PLC进行调试和测试。
可以通过连接真实设备来模拟运行情况,检查逻辑程序的正确性和设备响应的准确性。
制作好的功能块可以在需要的地方进行重复使用,提高了编程的效率和代码的可维护性。
下面是一些常见的欧姆龙PLC功能块的应用场景:1.逻辑控制功能:可以通过逻辑控制功能块来实现各种逻辑运算和判断条件。
功能块说明解析
HPCS-3000分布控制器算法功能块说明文档Version 1.0.11上海华文自动化系统工程有限公司前言文档内容本文是华文HPCS-3000系列产品文档的一部分,主要给出该系列中各种控制器所含功能块的详细设计资料。
对每种功能块,文档会说明以下内容:说明部分说明内容名称功能块的名称,和在功能块图中的标记名结构功能块每个输入输出信号的含义和作用描述说明功能和用途实用例实际使用中的常见连接方式特殊说明列出功能块使用中必须注意的问题目录1实数运算 (1)1.1FADD二输入浮点加法 (1)1.2FSUB二输入浮点减法 (2)1.3FMUL二输入浮点乘法 (3)1.4FDIV二输入浮点除法 (3)1.5EXP指数运算 (4)1.6LOG对数运算 (5)1.7ABS取绝对值 (5)1.8SQR取平方根 (6)1.9RND随机函数 (6)1.10SIN正弦函数 (7)1.11COS余弦函数 (7)1.12TAN正切函数 (8)1.13ATN反正切函数 (8)1.14PLOYNOM五次多项式 (9)1.15SUM8八输入数学统计器 (10)1.16CMP数值比较 (11)2整数运算 (12)2.1WADD整数加法 (12)2.2WMUL整数乘法 (13)2.3WDIV整数除法 (14)2.4MOD取模运算 (14)2.5WAND整数与运算 (15)2.6WOR整数或运算 (16)2.7WXOR整数异或运算 (16)2.8WNOT整数求反运算 (17)2.9WCMP整数比较 (17)3布尔运算 (19)3.1AND逻辑与 (19)3.2OR逻辑或 (20)3.3XOR逻辑异或 (20)3.4NOT逻辑非 (21)3.5EDGE边沿检测 (21)3.6UEDG上升沿检测 (21)3.7DEDG下降沿检测 (22)3.8SET置1 (22)3.9RESET置0(复位) (23)3.10RS触发器 (23)4类型转换 (25)4.2B16TOW16位逻辑组合 (26)4.3WTOF整数转实数 (27)4.4FTOW实数转整数 (27)4.5WTOBCD整数转BCD码 (28)4.6BCDTOW BCD码转整数 (28)5信号控制 (29)5.1TON延时合 (29)5.2TOFF延时断 (30)5.3PULSE脉冲 (31)5.4XPULSE定时脉冲 (31)5.5CTU递增计数器 (32)5.6CTD递减计数器 (33)5.7COUNT增减计数器 (33)5.8SQUAR方波发生器 (34)5.9SGN信号发生器 (35)5.10PSUM脉冲量累加器 (36)6过程处理 (37)6.1EPID偏差PID控制 (37)6.2ERV偏差计算 (39)6.3LDLG超前滞后 (40)6.4INTG积分运算 (41)6.5DIFF微分运算 (42)6.6FILTER三阶滤波 (42)6.7TWOSEL信号二选一 (43)6.8THRSEL信号三选一 (44)6.9SFT无扰动切换 (45)6.10LIMIT幅度限制 (46)6.11LMTV变化速率限制 (46)6.12BALANCE2二输出平衡模块 (47)6.13MLINE分段线性转换 (48)6.14TSUM时域统计模块 (49)6.15TSUMD时域开关量统计模块 (50)6.16DELAY滞后模块 (50)7设备操作功能 (52)7.1DMA数字软手操 (52)7.2SMA模拟软手操 (53)7.3INTKEY44键互锁开关 (54)7.4TWOPOS两位位置控制 (55)7.5DEV1单向设备控制 (56)7.6DEV2双向设备控制 (57)7.7STEP步序控制 (59)7.9MDIG开关量组合逻辑 (62)7.10SSA模拟伺服放大器 (63)8特殊算法 (65)8.1TQ信号质量 (65)8.2SA VE数据存盘 (66)8.3EQU实数赋值 (67)8.4WEQU条件赋值 (67)8.5EXEC过程跳转 (68)8.6PTC热力性质计算 (68)9DEH功能块 (70)9.1SPO软件脉冲输出 (70)9.2DDS数字驱动伺服模块 (71)9.3DSFT开关量选择模块 (72)9.4KBML键盘模拟量增减 (72)9.5ES/MA模拟量软手操器 (73)9.6F(T)12段信号发生器 (75)9.7QOR88输入开关量处理 (76)10附录 (77)10.1控制器状态说明 (77)10.2控制器网络状态说明 (77)10.3控制柜中的卡件状态说明 (78)10.4状态变量的掩码说明 (78)10.5强制功能说明 (79)10.6查询功能说明 (79)10.7控制器组态注意事项说明 (80)10.8网络时钟设置说明 (81)1实数运算介绍该类算法主要是涉及到实数的一些运算功能块,可以利用运算功能块构成特定的表达式或实现某种算法。
NT6000DCS算法功能块
NT6000DCS算法功能块NT6000V3A DCS⽤户⼿册DPU算法功能模块⽬录⽬录 (I)1 概述 (1)2 功能模块详述 (5)2.1 I/O模块 (5)2.1.1 IO总线模块(IOBUS) (5)2.1.2 毫安模块(MA模块) (8)2.1.3 热电阻模块(RTD模块) (9)2.1.4 热电偶模块(TC模块) (10)2.1.5 开关量输⼊模块(DI模块) (11)2.1.6 开关量输出模块(DO模块) (12)2.1.7 模拟量输出模块(AO模块) (13)2.1.8 脉冲量输⼊模块(PI模块) (14)2.1.9 单通道伺服控制模块(VPC模块) (15)2.1.10 单通道超速保护模块(OPC模块) (18)2.1.11 单通道伺服控制配置模块(VPCS模块) (20)2.1.12 单通道超速保护配置模块(OPCS模块) (22)2.1.13 双通道差分位移信号输⼊模块(LVDT模块) (23)2.1.14 事件序列记录模块(SOE模块) (25)2.1.15 远程模拟量引⽤模块(NAI模块) (27)2.1.16 远程开关量引⽤模块(NDI模块) (28)2.1.17 页间模拟量引⽤模块(PAI模块) (29)2.1.18 页间开关量引⽤模块(PDI模块) (30)2.1.19 电流信号的转换模块(SMA模块) (31)2.1.20 模拟量输出信号的转换模块(SAO模块) (34)2.1.21 开关量输⼊信号的转换模块(SDI模块) (36)2.1.22 开关量输出信号的转换模块(SDO模块) (37)2.1.23 热电偶信号的转换模块(STC模块) (38)2.1.24 热电阻信号的转换模块(SRTD模块) (40)2.1.25 频率信号的转换模块(SFI模块) (42)2.1.26 脉冲量输⼊信号的转换模块(SPI模块) (43)2.1.29 开关量输⼊模块(PBO模块) (46)2.1.30 模拟量输⼊模块(PRO模块) (46)2.1.31 开关量输⼊模块(DIN模块) (47)2.1.32 开关量输出模块(DOUT模块) (48) 2.1.33 模拟量输⼊模块(AIN模块) (49)2.1.34 模拟量输⼊模块(AOUT模块) (50) 2.2 逻辑时序模块 (51)2.2.1 两输⼊开关量或模块(OR2模块) (51) 2.2.2 三输⼊开关量或模块(OR3模块) (52) 2.2.3 四输⼊开关量或模块(OR4模块) (52) 2.2.4 两输⼊开关量与模块(AND2模块) (53) 2.2.5 三输⼊开关量与模块(AND3模块) (53) 2.2.6 四输⼊开关量与模块(AND4模块) (54) 2.2.7 两输⼊开关量异或模块(XOR模块) (54) 2.2.8 开关量取反模块(NOT模块) (55)2.2.9 RS触发器模块(MRS模块) (55)2.2.10 D触发器模块(DTR模块) (56)2.2.11 脉冲发⽣模块(OSP模块) (56)2.2.12 多功能脉冲发⽣模块(PLS模块) (57) 2.2.13 延时开模块(TON模块) (58)2.2.14 延时关模块(TOF模块) (58)2.2.15 ⽐较模块(CMP模块) (59)2.2.16 功能⽐较模块(CMPA模块) (60)2.2.17 周期脉冲触发模块(TPO模块) (62) 2.2.18 ⾸出模块(FIST模块) (63)2.2.19 位组合模块(BTOW模块) (66)2.2.20 位拆分模块(WTOB模块) (68)2.2.21 位输出模块(BIT模块) (70)2.3 数学运算模块 (71)2.3.1 加法模块(ADD模块) (71)2.3.2 减法模块(SUB模块) (72)2.3.3 乘法模块(MUL模块) (72)2.3.4 除法模块(DIV模块) (73)2.3.7 ⼩值模块(MIN模块) (74)2.3.8 ⼤值模块(MAX模块) (75)2.3.9 求平均值模块(A VG模块) (75)2.3.10 求绝对值模块(ABS模块) (76)2.3.11 模拟量取反模块(CHS模块) (76)2.3.12 常⽤对数运算模块(LOG模块) (77)2.3.13 反常⽤对数运算模块(ALOG模块) (77)2.3.14 ⾃然对数运算模块(LN模块) (78)2.3.15 反⾃然对数运算模块(ALN模块) (78)2.3.16 幂运算模块(EXP模块) (79)2.3.17 正弦运算模块(SIN模块) (79)2.3.18 余弦运算模块(COS模块) (80)2.3.19 正切运算模块(TAN模块) (80)2.3.20 反正弦运算模块(ASIN模块) (81)2.3.21 反余弦运算模块(ACOS模块) (81)2.3.22 反正切运算模块(A TAN模块) (82)2.3.23 整除运算模块(IDIV模块) (82)2.3.24 模运算模块(IMOD模块) (83)2.4 控制算法模块 (84)2.4.1 PID运算模块(PID模块) (84)2.4.2 ⼆选⼀模块(SWCH模块) (88)2.4.3 ⾼值记录模块(RMAX模块) (89)2.4.4 低值记录模块(RMIN模块) (89)2.4.5 限幅模块(LIM模块) (90)2.4.6 开关量8选N模块(NINM模块) (91)2.4.7 曲线模块(CHAR模块) (92)2.4.8 增减脉冲计数模块(IDEC模块) (93)2.4.9 速率限制模块(RLIM模块) (94)2.4.10 限值可连⼊的速率限制模块(RLMA模块) (95) 2.4.11 速率报警模块(RALM模块) (96)2.4.12 仿真模块(SIM模块) (97)2.4.13 两值优选模块(VOT2模块) (99)2.4.14 三值优选模块(VOT3模块) (100)2.4.17 量程模块(RANG模块) (104)2.4.18 ⼀阶滤波模块(FILT模块) (105)2.4.19 超前滞后模块(LLAG模块) (106)2.4.20 微分模块(DIFF模块) (107)2.4.21 流量累积模块(ACC模块) (108)2.4.22 超限报警模块(ANA模块) (110)2.4.23 顺控模块(SFC模块) (111)2.4.24 智能跟踪模块(TRAK模块) (114)2.4.25 ⼿操模块(MANS模块) (115)2.5 特殊功能模块 (117)2.5.1 DPU状态监视模块(DPU模块) (117)2.5.2 DPU运⾏信息监视模块(TASK模块) (118)2.5.3 页⾯运算周期模块(PSPD模块) (118)2.5.4 IO通道状态监视模块(SQC模块) (119)2.5.5 输⼊数据状态监视模块(QC模块) (120)2.5.6 过热蒸汽流量测量运算模块(STMF模块) (121)2.5.7 单室平衡容器汽包⽔位测量计算模块(WLCS模块) (122)2.5.8 双室平衡容器汽包⽔位测量计算模块(WLCD模块) (123)2.5.9 模拟量报警模块(AALM模块) (124)2.5.10 开关量报警模块(BALM模块) (126)2.5.11 16Bit布尔包报警模块(W ALM模块) (128)2.5.12 IO模件通讯状态监视模块(COMS模块) (130)2.5.13 DPU时间⽹络同步配置模块(NTPC模块) (131)2.6 设备驱动模块 (132)2.6.1 电机驱动模块(DEVM模块) (132)2.6.2 单输出电磁阀驱动模块(DEVS模块) (137)2.6.3 双输出电动门驱动模块(DEVD模块) (142)DPU算法功能块1 概述打开组态软件的视图——⼯具箱,即可看到所有的算法功能模块。
功能块介绍
CENTUM VP功能块介绍-------CACUL
通用运算式的组合函数
参数 labs(arg) dabs(arg) lmax(arg1,arg2,….) dmax(arg1,arg2,….) lmin(arg1,arg2,….) dmin(arg1,arg2,….) power(arg1,arg2) 功能 取绝对值 取绝对值 取最大值 取最大值 取最小值 取最小值 arg1的arg2次方 数据类型 long double long double long double double
函数名 labs dabs lmax dmax lmin dmin power
sqrt exp
log
sqrt (arg) exp(arg)
log(arg)
开方 自然底数e的arg次方
arg对e的导数
double double
double
CENTUM VP功能块介绍-------CACUL
CENTUM VP功能块介绍-------CACUL
如下所示,我们可以将FI001、TI001、PI001分别接入计算块和TPCFL进 行比较以验证计算结果。
CENTUM VP功能块介绍-------CACUL
float M1,M2,M3,M4 alias TB BDSET.DT01 alias PB BDSET.DT02 M1=(RV2+101.325)*(TB+273.15) M2=(PB+101.325)*(RV1+273.15) M3=M1/M2 M4=SQRT(M3) CPV=RV*M4
CACUL可以用书写算数表达式的方式来自定 义运算过程。 算数表达式——程序组成,包括:定义算数表 达式的开始、注释、定义变量、书写运算式、 结束表达式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Setup
Setup
Setup
Setup
Carry propagation
Carry propagation
Carry propagation
Carry propagation
Sum M bits
Sum
Sum
tsum
Sum
最坏情况下进位产生于第一位的位臵,逐位通过第一个模 块,跃过(N/M-1)个旁路级,并且被吸收在最后一位的位臵上 而不产生输出进位
VDD A B Ci S Ci A B
EE141 Integrated © Digital
Circuits2nd
24 transistors
15
Arithmetic Circuits
镜像加法器特点
仅用24个管子 NMOS和PMOS链完全对称,进位产生电路
最多只有两个晶体管串联 连接Ci晶体管放在最接近门的输出端处 只有进位电路中的晶体管才需优化尺寸 以改善速度,求和电路的所有管子可最 小尺寸
__
__
动态实现使电路更加简单,由 于动态电路是单方向工作,则用 NMOS管代替传输门,预充电输出 使电路不需要Di 19
Arithmetic Circuits
用动态逻辑实现曼彻斯特进位链
VDD P0 P1 P2 P3 C3 Ci,0 G0 G1 G2 G3
C0
C1
C2
C3
在预充电阶段(Ø=0),传输管进位链中的所有中间节点都 被预充电到VDD,在求值阶段,当有输入进位且传播信号为PK 为高电平,或进位产生信号(GK)为高电平,节点CK放电
数字集成电路设计
---电路、系统与设计 设计运算功能块
Jan M. Rabaey Anantha Chandrakasan Borivoje Nikolic 福州大学微电子系 王仁平
EE141 Integrated © Digital
Circuits2nd
1
Arithmetic Circuits
本章内容
在进位产生电路中堆叠许多PMOS管 Co信号的本征负载电容大,两个扩散电容、6个 栅电容和布线电容 进位产生电路中信号传播两个反相级 和产生要求一个额外的逻辑级
11
3. 4.
EE141 Integrated © Digital
Circuits2nd
Arithmetic Circuits
设计技巧
在进位产生电路第一个门的设计中信号Ci放在 串联级数较少的PMOS管支路上,使它的逻辑努 力降低为2 连接到Ci的NMOS管和PMOS管尽可能地放在靠近 这个门的输出端(关键路径) 利用加法器的反相特性,即把一个全加器单元 的所有输入反相则它的所有输出也反相,这种 方法可以减少进位路径中反相级数目
EE141 Integrated © Digital
Circuits2nd
4
Arithmetic Circuits
加法器
是限制速度的元件,优化可在逻辑层次和 电路层上进行。
逻辑层次上优化:重新安排布尔方程以得到 一个速度较快或面积较小的电路 电路层优化:改变管子尺寸及电路的拓扑连 接来优化速度
行波进位加法器
进位位从一级波动到另一级
A0 Ci,0 FA B0 Co,0 (= Ci,1) FA A1 B1 Co,1 FA A2 B2 Co,2 FA A3 B3 Co,3
S0
S1
S2
S3
最坏情况延时正比于输入字的位数N
td = O(N) tadder = (N-1)tcarry + tsum
EE141 Integrated © Digital
Circuits2nd
16
Arithmetic Circuits
镜像加法器
棍棒图
EE141 Integrated © Digital
Circuits2nd
17
Arithmetic Circuits
传输门型加法器
采用多路开关和XOR来设计,使用24个管子,P为A和B的 XOR, P=0,S=Ci,P=1,S=Ci P=0,C=A,P=1,C=Ci
应用前面介绍的技术来设计数据通道中
经常用到的一些电路如加法器、乘法器 和移位器 考虑性能、面积或功耗的设计 数据通道模块的逻辑和系统优化 数据通道中功耗与延时综合考虑
EE141 Integrated © Digital
Circuits2nd
2
Arithmetic Circuits
简单的数字处理器
曼彻斯特进位链加法器
静态实现
Pi Gi Ci Di Pi
动态实现
VDD
Pi Ci Gi
VDD
Co
Co
Pi 1 ,C0 Ci Pi 0 ,Di Ai Bi Di 1 ,C0 0 Di 0 ,Gi 1 ,C0 1
EE141 Integrated Circuits2nd © Digital
EE141 Integrated © Digital
Circuits2nd
23
Arithmetic Circuits
进位旁路加法器
P0 G1 Ci,0 P0
C o,0
G1
C o,1
P2
G2
Co,2
P3
G3 Co,3
FA
FA
FA
FA
P0 G1 Ci,0
P0
C o,0
G1
Co,1
P2
G2
C o,2
P3
G3
BP=P oP1 P2 P3
Multiplexer
用来加速加法器 操作,当BP=1时, 进位输入通过旁路立 即送到下一个模块, 若BP=0,则通过正 常路径得到进位输出
FA
FA
FA
FA
Co,3
Idea: If (P0 and P1 and P2 and P3 = 1) then Co3 = C0, else “kill” or “generate”.
EE141 Integrated © Digital
Circuits2nd
25
Arithmetic Circuits
计算N位旁路加法器延时
计算N位旁路加法器总传播时间近似公式:
tadder = tsetup + Mtcarry + (N/M-1)tbypass + (M-1)tcarry + tsum 各部分参数含义: tsetup:形成进位产生信号和进位传播信号所需要的固定时间 tcarry:通过一位的传播延时,最坏情况下通过具有M位的一个 级进位传播延时为M倍 tbypass:通过一级旁路多路开关的传播时间 tsum:产生最后一级的“和”所需要的时间
A Cin B Cout Full adder Sum
S = A B Ci = ABC i + ABC i + ABCi + ABCi C o = AB + BC i + ACi
EE141 Integrated © Digital
Circuits2nd
7
Arithmetic Circuits
P VDD A A B A P A P B Ci P Ci P A P Ci Setup
EE141 Integrated © Digital
VDD S Sum Generation VDD Co Carry Generation
VDD Ci Ci
A
P
18
Circuits2nd
Arithmetic Circuits
EE141 Integrated © Digital
Circuits2nd源自5Arithmetic Circuits
全加器
A Cin B Cout Full adder Sum
EE141 Integrated © Digital
Circuits2nd
6
Arithmetic Circuits
二进制加法器
进位链上每一节点的电容等于四个扩散电容、一个反相 器输入电容以及导线电容。反相器和PMOS预充电晶体管可保 持在单位尺寸,加上导线电容,这些固定电容估计为15fF,若 一个宽度为W0的单位尺寸晶体管的电阻为10K,扩散电容为 2fF,则宽度为W的晶体管链RC时间常数为:
W0 W RC (6fF 15fF ).10K W0 W
EE141 Integrated © Digital
Circuits2nd
20
Arithmetic Circuits
一个两位曼彻斯特进位链的棍棒图
数据通道版图由三排组织成位片式的单元组成: 计算进位传播信号 Propagate/Generate Row 和进位产生信号
VDD Pi Ci - 1 GND Inverter/Sum Row 产生最终的和
全加器的和与进位写成P,G,D的函数
定义仅依赖 A, B的三个新变量G,P,D
进位产生(G) = AB 进位传播 (P) = A B 进位取消(D) = A B
同样也能推导出 S、Co为P、D和Ci的函数
EE141 Integrated © Digital
Circuits2nd
8
Arithmetic Circuits
S0
S1
S2
S3
在一个进位链中消除反相器,偶数项用正向特性,奇数项用反相特性
14
EE141 Integrated © Digital
Circuits2nd
Arithmetic Circuits
改进的加法器电路: 镜像加法器
VDD A "0"-Propagate Ci "1"-Propagate A B A Generate B A B Ci B B Kill A Co A B VDD Ci