matlab hdl coder 范例
SIMULINK仿真
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
建立使能子系统的方法是:打开Simulink模块库中的Ports & Subsystems模块库,将Enable模块复制到子系统模型 中,则系统的图标发生了变化。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
U (s)
Kp
Ki s
Kd s
matlab中HDL Coder
HDL CoderHDL Coder™利用MATLAB® 函数、Simulink® 模型和Stateflow® 图生成可移植、可综合的Verilog® 和VHDL® 代码。
生成的HDL 代码可用于FPGA 编程或ASIC 原型开发和设计。
HDL Coder 提供了一个Workflow Advisor,可以自动执行Xilinx® 和Altera® FPGA 编程。
您可以控制HDL 架构和实施、突出显示关键路径,并估算硬件资源利用率。
HDL Coder 在Simulink 模型与生成的Verilog 和VHDL 代码之间提供了可追溯性,使高完整性应用程序的代码验证遵守DO-254 和其他标准。
主要特性∙独立于目标的、可综合的VHDL 和Verilog 代码∙代码生成支持MATLAB 函数、系统对象以及Simulink 模块∙使用Stateflow 实施Mealy 和Moore 有限状态机以及控制逻辑∙用于Xilinx 和Altera 应用程序面板编程的Workflow Advisor∙资源共享和重定时,用以平衡面积速度∙符合DO-254 的代码到模型和模型到代码可追溯性∙旧有代码集成使用HDL Coder 从MATLAB 或Simulink 生成HDL 代码。
您可以使用MATLAB 函数、Simulink 模型或将两者结合使用来生成可综合的VHDL 和Verilog 代码。
生成HDL 代码使用HDL Coder,只需几个步骤便可为FPGA 和ASIC 实施生成可综合的HDL 代码: 将MATLAB代码、Simulink模块和Stateflow图组合使用,进行设计建模。
∙优化模型以满足面积速度设计目标。
∙使用为MATLAB 和Simulink 集成的HDL Workflow Advisor 生成HDL 代码。
∙使用HDL Verifier™验证生成的代码。
MATLAB常用模块参考模板
commonly used blocks:常用模块continuous:连续性模块discontinuous:非续性模块discrete:离散模块logic and bit operations:逻辑和位操作模块组lookup Tables:查询表模块组Math Operations:数学运算模块组sources:信号模块组sinks:输出池模块组Model Verification:模型验证模块库Signal Routing:信号路线发送模块组signal Attributes:信号属性置模块组Model wide utilities:型实用模块库Ports & Subsystems:端口和子系统模块库User-Defined Functions:用户定义函数模块组control system toolbox 控制系统工具箱MATLAB 信号处理与通信 (76)Signal Processing Toolbox(信号处理工具箱)DSP System Toolbox(DSP系统工具箱)Communications System Toolbox(通信系统工具箱)Wavelet Toolbox(小波工具箱)Fixed-Point Toolbox(定点运算工具箱)RF Toolbox(射频工具箱)Phased Array System Toolbox(相控阵系统工具箱)MATLAB 数学、统计与优化 (116)Symbolic Math Toolbox (符号数学工具箱)Partial Differential Equation Toolbox (偏微分方程工具箱)Statistics Toolbox (统计学工具箱)Curve Fitting Toolbox (曲线拟合工具箱)Optimization Toolbox (优化工具箱)Global Optimization Toolbox (全局优化工具箱)Neural Network Toolbox (神经网络工具箱)Model-Based Calibration Toolbox (基于模型矫正工具箱)MATLAB 控制系统设计与分析 (10)Control System Toolbox(控制系统工具箱)System Identification Toolbox(系统辨识工具箱)Fuzzy Logic Toolbox(模糊逻辑工具箱)Robust Control Toolbox(鲁棒控制工具箱)Model Predictive Control Toolbox(模型预测控制工具箱)Aerospace Toolbox(航空航天工具箱)MATLAB 图像处理与计算机视觉 (111)Image Processing Toolbox (图像处理工具箱)Computer Vision System Toolbox (计算机视觉工具箱)Image Acquisition Toolbox (图像采集工具箱)Mapping Toolbox (地图工具箱)MATLAB 测试&测量 (14)Data Acquisition Toolbox(数据采集工具箱)Instrument Control Toolbox(仪表控制工具箱)Image Acquisition Toolbox(图像采集工具箱)OPC Toolbox(OPC开发工具箱)Vehicle Network Toolbox(车载网络工具箱)MATLAB 数据库访问与报告 (5)Database Toolbox(数据库工具箱)MATLAB Report Generator(MATLAB报告生成)版主: mathMATLAB 代码生成 (6)MATLAB Coder(MATLAB代码生成)Filter Design HDL Coder(滤波器设计HDL代码生成)Simulink 信号处理与通信 (7)DSP System Toolbox(DSP系统工具箱)Communications System Toolbox(通信系统工具箱)SimRF(RF 模块集功能)Computer Vision System Toolbox (计算机视觉工具箱)Simulink 物理建模 (28)Simscape(物理模型仿真模块组)SimMechanics(机构动态仿真模块组)SimDriveline(传动系统系统仿真模块组)SimHydraulics(液压仿真模块组)SimRF(RF 仿真模块组)SimElectronics(电子仿真模块组)SimPowerSystems(动力系统仿真模块组)。
ad20_电路仿真的方法_解释说明以及概述

ad20 电路仿真的方法解释说明以及概述1. 引言1.1 概述电路仿真是在计算机环境下对电路进行数学建模和分析的过程。
它通过使用软件工具来模拟和评估电路的性能,以便在设计过程中预测和解决可能出现的问题。
在AD20(即Analog Devices 20)电路仿真中,我们可以利用数字仿真方法、模拟仿真方法或混合仿真方法来提供准确且全面的结果。
1.2 文章结构本文将首先介绍ad20电路仿真的不同方法,包括数字仿真、模拟仿真和混合仿真。
然后将详细解释每种方法,并提供应用示例以帮助读者更好地理解这些方法的原理和用途。
最后,文章将给出结论总结。
1.3 目的本文的目的是为读者介绍ad20电路仿真领域中各种方法的基本概念和应用示例。
通过阅读本文,读者将了解到不同仿真方法之间的区别、优劣势以及如何选择适当的方法来满足特定需求。
此外,本文还旨在提供对于需要进行ad20电路仿真分析的专业人士或学生们一个启示,促使他们进一步深入研究和应用电路仿真的方法。
2. ad20电路仿真的方法2.1 数字仿真方法在ad20电路仿真中,数字仿真是一种常见的方法。
它通过将电路表示为离散时间信号的数学模型,利用计算机来模拟和分析电路行为。
数字仿真方法可以基于时域或频域进行。
2.2 模拟仿真方法另一种常用的电路仿真方法是模拟仿真。
模拟仿真使用连续时间信号来建模和分析电路。
它通常使用SPICE(Simulation Program with Integrated Circuit Emphasis)模拟器或器件级模拟器进行。
2.3 混合仿真方法混合仿真是将数字仿真和模拟仿真相结合的一种方法。
它可以更准确地描述复杂的电路系统,并提供更高级别的性能评估和优化。
通常通过跨领域混合仿模软件实现,同时还可以利用模型和数据转换工具进行数据交换和转换。
通过上述三种不同的电路仿真方法,我们可以更全面地理解和研究ad20电路的行为、性能以及潜在问题。
在后续章节中,我们将详细解释这些方法,并提供相关的应用示例来帮助读者更好地理解和应用这些仿真方法。
实验一MATLAB工作环境熟悉及简单命令的执行[五篇范文]
![实验一MATLAB工作环境熟悉及简单命令的执行[五篇范文]](https://img.taocdn.com/s3/m/acd60bf4cf2f0066f5335a8102d276a201296051.png)
实验一MATLAB工作环境熟悉及简单命令的执行[五篇范文]第一篇:实验一MATLAB工作环境熟悉及简单命令的执行实验一MATLAB工作环境熟悉及简单命令的执行一、实验目的:熟悉MATLAB的工作环境,学会使用MATLAB进行一些简单的运算。
二、实验内容:MATLAB的启动和退出,熟悉MATLAB的桌面(Desktop),包括菜单(Menu)、工具条(T oolbar)、命令窗口(Command Window)、历史命令窗口、工作空间(Workspace)等;完成一些基本的矩阵操作;学习使用在线帮助系统。
三、实验步骤:1、启动MATLAB,熟悉MATLAB的桌面。
2、在命令窗口执行命令完成以下运算,观察workspace的变化,记录运算结果。
(1)(365-52⨯2-70)÷3(2)>>area=pi*2.5^2(3)已知x=3,y=4,在MATLAB中求z:x2y3z=2x-y(4)将下面的矩阵赋值给变量m1,在workspace中察看m1在内存中占用的字节数。
⎡162313⎤⎢511108⎥⎥ m1=⎢⎢97612⎥⎢⎥⎣414151⎦执行以下命令>>m1(2 , 3)>>m1(11)>>m1(: , 3)>>m1(2 : 3 , 1 : 3)>>m1(1 ,4)+ m1(2 ,3)+ m1(3 ,2)+ m1(4 ,1)(5)执行命令>>help abs查看函数abs的用法及用途,计算abs(3 + 4i)(6)执行命令>>x=0:0.1:6*pi;>>y=5*sin(x);>>plot(x,y)(6)运行MATLAB的演示程序,>>demo,以便对MATLAB有一个总体了解。
四、思考题1、以下变量名是否合法?为什么?(1)x2(2)3col(3)_row(4)for2、求以下变量的值,并在MATLAB中验证。
matlab编程实例100例(精编文档).doc
【最新整理,下载后即可编辑】1-32是:图形应用篇33-66是:界面设计篇67-84是:图形处理篇85-100是:数值分析篇实例1:三角函数曲线(1)function shili01h0=figure('toolbar','none',...'position',[198****0300],...'name','实例01');h1=axes('parent',h0,...'visible','off');x=-pi:0.05:pi;y=sin(x);plot(x,y);xlabel('自变量X');ylabel('函数值Y');title('SIN( )函数曲线');grid on实例2:三角函数曲线(2)function shili02h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例02');x=-pi:0.05:pi;y=sin(x)+cos(x);plot(x,y,'-*r','linewidth',1);grid onxlabel('自变量X');ylabel('函数值Y');title('三角函数');实例3:图形的叠加function shili03h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例03');x=-pi:0.05:pi;y1=sin(x);y2=cos(x);plot(x,y1,...'-*r',...x,y2,...'--og');grid onxlabel('自变量X');ylabel('函数值Y');title('三角函数');实例4:双y轴图形的绘制function shili04h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例04');x=0:900;a=1000;b=0.005;y1=2*x;y2=cos(b*x);[haxes,hline1,hline2]=plotyy(x,y1,x,y2,'semilogy','plot'); axes(haxes(1))ylabel('semilog plot');axes(haxes(2))ylabel('linear plot');实例5:单个轴窗口显示多个图形function shili05h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例05');t=0:pi/10:2*pi;[x,y]=meshgrid(t);subplot(2,2,1)plot(sin(t),cos(t))axis equalsubplot(2,2,2)z=sin(x)-cos(y);plot(t,z)axis([0 2*pi -2 2])subplot(2,2,3)h=sin(x)+cos(y);plot(t,h)axis([0 2*pi -2 2])subplot(2,2,4)g=(sin(x).^2)-(cos(y).^2);plot(t,g)axis([0 2*pi -1 1])实例6:图形标注function shili06h0=figure('toolbar','none',...'position',[200 150 450 400],...'name','实例06');t=0:pi/10:2*pi;h=plot(t,sin(t));xlabel('t=0到2\pi','fontsize',16);ylabel('sin(t)','fontsize',16);title('\it{从0to2\pi 的正弦曲线}','fontsize',16) x=get(h,'xdata');y=get(h,'ydata');imin=find(min(y)==y);imax=find(max(y)==y);text(x(imin),y(imin),...['\leftarrow最小值=',num2str(y(imin))],...'fontsize',16)text(x(imax),y(imax),...['\leftarrow最大值=',num2str(y(imax))],...'fontsize',16)实例7:条形图形function shili07h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例07');tiao1=[562 548 224 545 41 445 745 512];tiao2=[47 48 57 58 54 52 65 48];t=0:7;bar(t,tiao1)xlabel('X轴');ylabel('TIAO1值');h1=gca;h2=axes('position',get(h1,'position'));plot(t,tiao2,'linewidth',3)set(h2,'yaxislocation','right','color','none','xticklabel',[]) 实例8:区域图形function shili08h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例08');x=91:95;profits1=[88 75 84 93 77];profits2=[51 64 54 56 68];profits3=[42 54 34 25 24];profits4=[26 38 18 15 4];area(x,profits1,'facecolor',[0.5 0.9 0.6],...'edgecolor','b',...'linewidth',3)hold onarea(x,profits2,'facecolor',[0.9 0.85 0.7],...'edgecolor','y',...'linewidth',3)hold onarea(x,profits3,'facecolor',[0.3 0.6 0.7],...'edgecolor','r',...'linewidth',3)hold onarea(x,profits4,'facecolor',[0.6 0.5 0.9],...'edgecolor','m',...'linewidth',3)hold offset(gca,'xtick',[91:95])set(gca,'layer','top')gtext('\leftarrow第一季度销量') gtext('\leftarrow第二季度销量') gtext('\leftarrow第三季度销量') gtext('\leftarrow第四季度销量') xlabel('年','fontsize',16);ylabel('销售量','fontsize',16);实例9:饼图的绘制function shili09h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例09');t=[54 21 35;68 54 35;45 25 12;48 68 45;68 54 69];x=sum(t);h=pie(x);textobjs=findobj(h,'type','text');str1=get(textobjs,{'string'});val1=get(textobjs,{'extent'});oldext=cat(1,val1{:});names={'商品一:';'商品二:';'商品三:'};str2=strcat(names,str1);set(textobjs,{'string'},str2)val2=get(textobjs,{'extent'});newext=cat(1,val2{:});offset=sign(oldext(:,1)).*(newext(:,3)-oldext(:,3))/2; pos=get(textobjs,{'position'});textpos=cat(1,pos{:});textpos(:,1)=textpos(:,1)+offset;set(textobjs,{'position'},num2cell(textpos,[3,2]))实例10:阶梯图function shili10h0=figure('toolbar','none',...'position',[200 150 450 400],...'name','实例10');a=0.01;b=0.5;t=0:10;f=exp(-a*t).*sin(b*t);stairs(t,f)hold onplot(t,f,':*')hold offglabel='函数e^{-(\alpha*t)}sin\beta*t的阶梯图'; gtext(glabel,'fontsize',16)xlabel('t=0:10','fontsize',16)axis([0 10 -1.2 1.2])实例11:枝干图function shili11h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例11');x=0:pi/20:2*pi;y1=sin(x);y2=cos(x);h1=stem(x,y1+y2);hold onh2=plot(x,y1,'^r',x,y2,'*g');hold offh3=[h1(1);h2];legend(h3,'y1+y2','y1=sin(x)','y2=cos(x)') xlabel('自变量X');ylabel('函数值Y');title('正弦函数与余弦函数的线性组合'); 实例12:罗盘图function shili12h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例12');winddirection=[54 24 65 84256 12 235 62125 324 34 254];windpower=[2 5 5 36 8 12 76 14 10 8];rdirection=winddirection*pi/180;[x,y]=pol2cart(rdirection,windpower); compass(x,y);desc={'风向和风力','北京气象台','10月1日0:00到','10月1日12:00'};gtext(desc)实例13:轮廓图function shili13h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例13');[th,r]=meshgrid((0:10:360)*pi/180,0:0.05:1); [x,y]=pol2cart(th,r);z=x+i*y;f=(z.^4-1).^(0.25);contour(x,y,abs(f),20)axis equalxlabel('实部','fontsize',16);ylabel('虚部','fontsize',16);h=polar([0 2*pi],[0 1]);delete(h)hold oncontour(x,y,abs(f),20)实例14:交互式图形function shili14h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例14');axis([0 10 0 10]);hold onx=[];y=[];n=0;disp('单击鼠标左键点取需要的点'); disp('单击鼠标右键点取最后一个点'); but=1;while but==1[xi,yi,but]=ginput(1);plot(xi,yi,'bo')n=n+1;disp('单击鼠标左键点取下一个点');x(n,1)=xi;y(n,1)=yi;endt=1:n;ts=1:0.1:n;xs=spline(t,x,ts);ys=spline(t,y,ts);plot(xs,ys,'r-');hold off实例14:交互式图形function shili14h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例14');axis([0 10 0 10]);hold onx=[];y=[];n=0;disp('单击鼠标左键点取需要的点'); disp('单击鼠标右键点取最后一个点'); but=1;while but==1[xi,yi,but]=ginput(1);plot(xi,yi,'bo')n=n+1;disp('单击鼠标左键点取下一个点');x(n,1)=xi;y(n,1)=yi;endt=1:n;ts=1:0.1:n;xs=spline(t,x,ts);ys=spline(t,y,ts);plot(xs,ys,'r-');hold off实例15:变换的傅立叶函数曲线function shili15h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例15');axis equalm=moviein(20,gcf);set(gca,'nextplot','replacechildren')h=uicontrol('style','slider','position',...[100 10 500 20],'min',1,'max',20)for j=1:20plot(fft(eye(j+16)))set(h,'value',j)m(:,j)=getframe(gcf);endclf;axes('position',[0 0 1 1]);movie(m,30)实例16:劳伦兹非线形方程的无序活动function shili15h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例15');axis equalm=moviein(20,gcf);set(gca,'nextplot','replacechildren')h=uicontrol('style','slider','position',...[100 10 500 20],'min',1,'max',20)for j=1:20plot(fft(eye(j+16)))set(h,'value',j)m(:,j)=getframe(gcf);endclf;axes('position',[0 0 1 1]);movie(m,30)实例17:填充图function shili17h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例17');t=(1:2:15)*pi/8;x=sin(t);y=cos(t);fill(x,y,'r')axis square offtext(0,0,'STOP',...'color',[1 1 1],...'fontsize',50,...'horizontalalignment','center') 例18:条形图和阶梯形图function shili18h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例18');subplot(2,2,1)x=-3:0.2:3;y=exp(-x.*x);bar(x,y)title('2-D Bar Chart')subplot(2,2,2)x=-3:0.2:3;y=exp(-x.*x);bar3(x,y,'r')title('3-D Bar Chart')subplot(2,2,3)x=-3:0.2:3;y=exp(-x.*x);stairs(x,y)title('Stair Chart')subplot(2,2,4)x=-3:0.2:3;y=exp(-x.*x);barh(x,y)title('Horizontal Bar Chart')实例19:三维曲线图function shili19h0=figure('toolbar','none',...'position',[200 150 450 400],...'name','实例19');subplot(2,1,1)x=linspace(0,2*pi);y1=sin(x);y2=cos(x);y3=sin(x)+cos(x);z1=zeros(size(x));z2=0.5*z1;z3=z1;plot3(x,y1,z1,x,y2,z2,x,y3,z3)grid onxlabel('X轴');ylabel('Y轴');zlabel('Z轴');title('Figure1:3-D Plot')subplot(2,1,2)x=linspace(0,2*pi);y1=sin(x);y2=cos(x);y3=sin(x)+cos(x);z1=zeros(size(x));z2=0.5*z1;z3=z1;plot3(x,z1,y1,x,z2,y2,x,z3,y3)grid onxlabel('X轴');ylabel('Y轴');zlabel('Z轴');title('Figure2:3-D Plot')实例20:图形的隐藏属性function shili20h0=figure('toolbar','none',...'position',[200 150 450 300],...'name','实例20');subplot(1,2,1)[x,y,z]=sphere(10);mesh(x,y,z)axis offtitle('Figure1:Opaque')hidden onsubplot(1,2,2)[x,y,z]=sphere(10);mesh(x,y,z)axis offtitle('Figure2:Transparent') hidden off实例21PEAKS函数曲线function shili21h0=figure('toolbar','none',...'position',[200 100 450 450],...'name','实例21');[x,y,z]=peaks(30);subplot(2,1,1)x=x(1,:);y=y(:,1);i=find(y>0.8&y<1.2);j=find(x>-0.6&x<0.5);z(i,j)=nan*z(i,j);surfc(x,y,z)xlabel('X轴');ylabel('Y轴');zlabel('Z轴');title('Figure1:surfc函数形成的曲面') subplot(2,1,2)x=x(1,:);y=y(:,1);i=find(y>0.8&y<1.2);j=find(x>-0.6&x<0.5);z(i,j)=nan*z(i,j);surfl(x,y,z)xlabel('X轴');ylabel('Y轴');zlabel('Z轴');title('Figure2:surfl函数形成的曲面') 实例22:片状图function shili22h0=figure('toolbar','none',...'position',[200 150 550 350],...'name','实例22');subplot(1,2,1)x=rand(1,20);y=rand(1,20);z=peaks(x,y*pi);t=delaunay(x,y);trimesh(t,x,y,z)hidden offtitle('Figure1:Triangular Surface Plot'); subplot(1,2,2)x=rand(1,20);y=rand(1,20);z=peaks(x,y*pi);t=delaunay(x,y);trisurf(t,x,y,z)title('Figure1:Triangular Surface Plot'); 实例23:视角的调整function shili23h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例23');x=-5:0.5:5;[x,y]=meshgrid(x);r=sqrt(x.^2+y.^2)+eps;z=sin(r)./r;subplot(2,2,1)surf(x,y,z)xlabel('X-axis')ylabel('Y-axis')zlabel('Z-axis')title('Figure1')view(-37.5,30)subplot(2,2,2)surf(x,y,z)xlabel('X-axis')ylabel('Y-axis')zlabel('Z-axis')title('Figure2')view(-37.5+90,30) subplot(2,2,3)surf(x,y,z)xlabel('X-axis')ylabel('Y-axis')zlabel('Z-axis')title('Figure3')view(-37.5,60)subplot(2,2,4)surf(x,y,z)xlabel('X-axis')ylabel('Y-axis')zlabel('Z-axis')title('Figure4')view(180,0)实例24:向量场的绘制function shili24h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例24');subplot(2,2,1)z=peaks;ribbon(z)title('Figure1')subplot(2,2,2)[x,y,z]=peaks(15);[dx,dy]=gradient(z,0.5,0.5); contour(x,y,z,10)hold onquiver(x,y,dx,dy)hold offtitle('Figure2')subplot(2,2,3)[x,y,z]=peaks(15);[nx,ny,nz]=surfnorm(x,y,z);surf(x,y,z)hold onquiver3(x,y,z,nx,ny,nz)hold offtitle('Figure3')subplot(2,2,4)x=rand(3,5);y=rand(3,5);z=rand(3,5);c=rand(3,5);fill3(x,y,z,c)grid ontitle('Figure4')实例25:灯光定位function shili25h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例25');vert=[1 1 1;1 2 1;2 2 1;2 1 1;1 1 2;12 2;2 2 2;2 1 2];fac=[1 2 3 4;2 6 7 3;4 3 7 8;15 8 4;1 2 6 5;5 6 7 8];grid offsphere(36)h=findobj('type','surface');set(h,'facelighting','phong',...'facecolor',...'interp',...'edgecolor',[0.4 0.4 0.4],...'backfacelighting',...'lit')hold onpatch('faces',fac,'vertices',vert,...'facecolor','y');light('position',[1 3 2]);light('position',[-3 -1 3]);material shinyaxis vis3d offhold off实例26:柱状图function shili26h0=figure('toolbar','none',...'position',[200 50 450 450],...'name','实例26'); subplot(2,1,1)x=[5 2 18 7 39 8 65 5 54 3 2];bar(x)xlabel('X轴');ylabel('Y轴');title('第一子图');subplot(2,1,2)y=[5 2 18 7 39 8 65 5 54 3 2];barh(y)xlabel('X轴');ylabel('Y轴');title('第二子图');实例27:设置照明方式function shili27h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例27');subplot(2,2,1)sphereshading flatcamlight leftcamlight rightlighting flatcolorbaraxis offtitle('Figure1')subplot(2,2,2)sphereshading flatcamlight leftcamlight rightlighting gouraudcolorbaraxis offtitle('Figure2')subplot(2,2,3)sphereshading interpcamlight rightcamlight leftlighting phongaxis offtitle('Figure3')subplot(2,2,4)sphereshading flatcamlight leftcamlight rightlighting nonecolorbaraxis offtitle('Figure4')实例28:羽状图function shili28h0=figure('toolbar','none',...'position',[200 150 450 350],...'name','实例28');subplot(2,1,1)alpha=90:-10:0;r=ones(size(alpha));m=alpha*pi/180;n=r*10;[u,v]=pol2cart(m,n);feather(u,v)title('羽状图')axis([0 20 0 10])subplot(2,1,2)t=0:0.5:10;y=exp(-x*t);feather(y)title('复数矩阵的羽状图')实例29:立体透视(1)function shili29h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例29');[x,y,z]=meshgrid(-2:0.1:2,...-2:0.1:2,...-2:0.1:2);v=x.*exp(-x.^2-y.^2-z.^2);grid onfor i=-2:0.5:2;h1=surf(linspace(-2,2,20),...linspace(-2,2,20),...zeros(20)+i);rotate(h1,[1 -1 1],30)dx=get(h1,'xdata');dy=get(h1,'ydata');dz=get(h1,'zdata');delete(h1)slice(x,y,z,v,[-2 2],2,-2)hold onslice(x,y,z,v,dx,dy,dz)hold offaxis tightview(-5,10)drawnowend实例30:立体透视(2)function shili30h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例30');[x,y,z]=meshgrid(-2:0.1:2,...-2:0.1:2,...-2:0.1:2);v=x.*exp(-x.^2-y.^2-z.^2); [dx,dy,dz]=cylinder;slice(x,y,z,v,[-2 2],2,-2)for i=-2:0.2:2h=surface(dx+i,dy,dz);rotate(h,[1 0 0],90)xp=get(h,'xdata');yp=get(h,'ydata');zp=get(h,'zdata');delete(h)hold onhs=slice(x,y,z,v,xp,yp,zp);axis tightxlim([-3 3])view(-10,35)drawnowdelete(hs)hold offend实例31:表面图形function shili31h0=figure('toolbar','none',...'position',[200 150 550 250],...'name','实例31');subplot(1,2,1)x=rand(100,1)*16-8;y=rand(100,1)*16-8;r=sqrt(x.^2+y.^2)+eps;z=sin(r)./r;xlin=linspace(min(x),max(x),33); ylin=linspace(min(y),max(y),33); [X,Y]=meshgrid(xlin,ylin);Z=griddata(x,y,z,X,Y,'cubic'); mesh(X,Y,Z)axis tighthold onplot3(x,y,z,'.','Markersize',20) subplot(1,2,2)k=5;n=2^k-1;theta=pi*(-n:2:n)/n;phi=(pi/2)*(-n:2:n)'/n;X=cos(phi)*cos(theta);Y=cos(phi)*sin(theta);Z=sin(phi)*ones(size(theta)); colormap([0 0 0;1 1 1])C=hadamard(2^k);surf(X,Y,Z,C)axis square实例32:沿曲线移动的小球h0=figure('toolbar','none',...'position',[198****8468],...'name','实例32');h1=axes('parent',h0,...'position',[0.15 0.45 0.7 0.5],...'visible','on');t=0:pi/24:4*pi;y=sin(t);plot(t,y,'b')n=length(t);h=line('color',[0 0.5 0.5],...'linestyle','.',...'markersize',25,...'erasemode','xor');k1=uicontrol('parent',h0,...'style','pushbutton',...'position',[80 100 50 30],...'string','开始',...'callback',[...'i=1;',...'k=1;,',...'m=0;,',...'while 1,',...'if k==0,',...'break,',...'end,',...'if k~=0,',...'set(h,''xdata'',t(i),''ydata'',y(i)),',...'drawnow;,',...'i=i+1;,',...'if i>n,',...'m=m+1;,',...'i=1;,',...'end,',...'end,',...'end']);k2=uicontrol('parent',h0,...'style','pushbutton',...'position',[180 100 50 30],...'string','停止',...'callback',[...'k=0;,',...'set(e1,''string'',m),',...'p=get(h,''xdata'');,',...'q=get(h,''ydata'');,',...'set(e2,''string'',p);,',...'set(e3,''string'',q)']); k3=uicontrol('parent',h0,...'style','pushbutton',...'position',[280 100 50 30],...'string','关闭',...'callback','close');e1=uicontrol('parent',h0,...'style','edit',...'position',[60 30 60 20]);t1=uicontrol('parent',h0,...'style','text',...'string','循环次数',...'position',[60 50 60 20]);e2=uicontrol('parent',h0,...'style','edit',...'position',[180 30 50 20]);t2=uicontrol('parent',h0,...'style','text',...'string','终点的X坐标值',...'position',[155 50 100 20]);e3=uicontrol('parent',h0,...'style','edit',...'position',[300 30 50 20]);t3=uicontrol('parent',h0,...'style','text',...'string','终点的Y坐标值',...'position',[275 50 100 20]);实例33:曲线转换按钮h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例33');x=0:0.5:2*pi;y=sin(x);h=plot(x,y);grid onhuidiao=[...'if i==1,',...'i=0;,',...'y=cos(x);,',...'delete(h),',...'set(hm,''string'',''正弦函数''),',...'h=plot(x,y);,',...'grid on,',...'else if i==0,',...'i=1;,',...'y=sin(x);,',...'set(hm,''string'',''余弦函数''),',...'delete(h),',...'h=plot(x,y);,',...'grid on,',...'end,',...'end'];hm=uicontrol(gcf,'style','pushbutton',...'string','余弦函数',...'callback',huidiao);i=1;set(hm,'position',[250 20 60 20]);set(gca,'position',[0.2 0.2 0.6 0.6])title('按钮的使用')hold on实例34:栅格控制按钮h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例34');x=0:0.5:2*pi;y=sin(x);plot(x,y)huidiao1=[...'set(h_toggle2,''value'',0),',...'grid on,',...];huidiao2=[...'set(h_toggle1,''value'',0),',...'grid off,',...];h_toggle1=uicontrol(gcf,'style','togglebutton',...'string','grid on',...'value',0,...'position',[20 45 50 20],...'callback',huidiao1);h_toggle2=uicontrol(gcf,'style','togglebutton',...'string','grid off',...'value',0,...'position',[20 20 50 20],...'callback',huidiao2);set(gca,'position',[0.2 0.2 0.6 0.6])title('开关按钮的使用')实例35:编辑框的使用h0=figure('toolbar','none',...'position',[200 150 350 250],...'name','实例35');f='Please input the letter';huidiao1=[...'g=upper(f);,',...'set(h2_edit,''string'',g),',...];huidiao2=[...'g=lower(f);,',...'set(h2_edit,''string'',g),',...];h1_edit=uicontrol(gcf,'style','edit',...'position',[100 200 100 50],...'HorizontalAlignment','left',...'string','Please input the letter',...'callback','f=get(h1_edit,''string'');',...'background','w',...'max',5,...'min',1);h2_edit=uicontrol(gcf,'style','edit',...'HorizontalAlignment','left',...'position',[100 100 100 50],...'background','w',...'max',5,...'min',1);h1_button=uicontrol(gcf,'style','pushbutton',...'string','小写变大写',...'position',[100 45 100 20],...'callback',huidiao1);h2_button=uicontrol(gcf,'style','pushbutton',...'string','大写变小写',...'position',[100 20 100 20],...'callback',huidiao2);实例36:弹出式菜单h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例36');x=0:0.5:2*pi;y=sin(x);h=plot(x,y);grid onhm=uicontrol(gcf,'style','popupmenu',...'string',...'sin(x)|cos(x)|sin(x)+cos(x)|exp(-sin(x))',...'position',[250 20 50 20]);set(hm,'value',1)huidiao=[...'v=get(hm,''value'');,',...'switch v,',...'case 1,',...'delete(h),',...'y=sin(x);,',...'h=plot(x,y);,',...'grid on,',...'case 2,',...'delete(h),',...'y=cos(x);,',...'h=plot(x,y);,',...'grid on,',...'case 3,',...'delete(h),',...'y=sin(x)+cos(x);,',...'h=plot(x,y);,',...'grid on,',...'case 4,',...'delete(h),',...'y=exp(-sin(x));,',...'h=plot(x,y);,',...'grid on,',...'end'];set(hm,'callback',huidiao)set(gca,'position',[0.2 0.2 0.6 0.6]) title('弹出式菜单的使用')实例37:滑标的使用h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例37');[x,y]=meshgrid(-8:0.5:8);r=sqrt(x.^2+y.^2)+eps;z=sin(r)./r;h0=mesh(x,y,z);h1=axes('position',...[0.2 0.2 0.5 0.5],...'visible','off');htext=uicontrol(gcf,...'units','points',...'position',[20 30 45 15],...'string','brightness',...'style','text');hslider=uicontrol(gcf,...'units','points',...'position',[10 10 300 15],...'min',-1,...'max',1,...'style','slider',...'callback',...'brighten(get(hslider,''value''))'); 实例38:多选菜单h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例38');[x,y]=meshgrid(-8:0.5:8);r=sqrt(x.^2+y.^2)+eps;z=sin(r)./r;h0=mesh(x,y,z);hlist=uicontrol(gcf,'style','listbox',...'string','default|spring|summer|autumn|winter',...'max',5,...'min',1,...'position',[20 20 80 100],...'callback',[...'k=get(hlist,''value'');,',...'switch k,',...'case 1,',...'colormap default,',...'case 2,',...'colormap spring,',...'case 3,',...'colormap summer,',...'case 4,',...'colormap autumn,',...'case 5,',...'colormap winter,',...'end']);实例39:菜单控制的使用h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例39');x=0:0.5:2*pi;y=cos(x);h=plot(x,y);grid onset(gcf,'toolbar','none')hm=uimenu('label','example');huidiao1=[...'set(hm_gridon,''checked'',''on''),',...'set(hm_gridoff,''checked'',''off''),',...'grid on'];huidiao2=[...'set(hm_gridoff,''checked'',''on''),',...'set(hm_gridon,''checked'',''off''),',...'grid off'];hm_gridon=uimenu(hm,'label','grid on',...'checked','on',...'callback',huidiao1);hm_gridoff=uimenu(hm,'label','grid off',...'checked','off',...'callback',huidiao2);实例40:UIMENU菜单的应用h0=figure('toolbar','none',...'position',[200 150 450 250],...'name','实例40');h1=uimenu(gcf,'label','函数');h11=uimenu(h1,'label','轮廓图',...'callback',[...'set(h31,''checked'',''on''),',...'set(h32,''checked'',''off''),',...'[x,y,z]=peaks;,',...'contour3(x,y,z,30)']);h12=uimenu(h1,'label','高斯分布',...'callback',[...'set(h31,''checked'',''on''),',...'set(h32,''checked'',''off''),',...'mesh(peaks);,',...'axis tight']);。
Matlab硬件代码(HDL)生成
警告:本文是雷声天下将Loren 的Matlab 日志翻译而成,并且添加了个人的使用体验,只发布到新浪爱问平台上,愿意与广大网友共同学习分享,不得被用于任何商业场合,如有违背,必将追究责任!!!技术交流or 项目探讨欢迎联系:dlbuaa@ Matlab 硬件代码硬件代码(HDL)(HDL)(HDL)生成生成本文的原作者并不是Loren 二十Mathworks 公司的HDL Coder 产品团队的领导者Kiran Kintali。
利用这一团队的产品可以从M 代码直接生成HDL 代码,本文同时给出了多种相关的Matlab 软件特性。
1.Matlab 硬件代码生成工具的介绍如果你在用Matlab 对应用于FPGA 或者其他ASIC 现代数字信号处理或者视频和图像处理算法建模仿真,请继续阅读FPGA 给出了通用处理器(GPP)和专用集成电路(ASIC)之间的一个很好的融合方案。
GPP 是完全可编程器件,但是在功率消耗和性能上差强人意(必定不是专用的器件啊)。
ASIC 用于特定的功能在功耗和性能上有优势,但是需要经历及其昂贵的开发设计过程。
FPGA 同样也用于ASIC 的原型设计验证过程中和软件开发中。
在应用FPGA 替代传统处理器对新的算法进行的原型验证的过程中,要求高吞吐率、高性能的应用场合越来越多。
多数算法在Matlab 中业已实现,同时也有相应的可视化分析测试功能。
当目标是为了FPGA 或者ASIC 设计中,不得不把Matlab 算法手动地转化为HDL 代码。
对于多数谙熟软件设计的编程者来说,掌握硬件FPGA 开发设计过程是一种挑战。
与软件算法开发不同,硬件开发需要设计者“并行思考”。
其他的困难例如:学习VHDL 或者Verilog 语言、掌握FPGA 生产商提供的开发软件、理解诸如“多循环路径”、“延迟均衡”术语。
在这篇日志中,我将详细描述一条更容易的从Matlab 到FPGA 的路径。
我将向你们展示如何自动将Matlab 算法代码生成HDL 代码、在FPGA 上验证代码和用Matlab 验证你的HDL 代码。
matlab code
11.5 由M函数文件产生用户菜单和控件11.5.1 利用全局变量编写用户界面函数文件【* 例11.5.1-1 】目标:利用M 函数文件创建与例11.4.3.3-1 相同的用户界面。
本例演示:如何依靠全局变量传递控件的图柄,从而保证回调动作正确执行。
(1)编写M 函数文件exm1151_1.m 和calledit1.m[exm1151_1.m]function exm1151_1( )global hedithpophlist(这中间是:原exm11433_1.m 第〈1 〉行到第〈25 〉行的全部指令)set(hedit, 'callback' , 'calledit1' ); % 编辑框输入引起回调<26>set(hpop, 'callback' , 'calledit1' ); % 弹出框选择引起回调<27>set(hpush, 'callback' , 'calledit1' ); % 按键引起的回调<28>[calledit1.m]function calledit1( )global hedithpophlist(下面续接内容是:原calledit.m第〈2 〉行以下的全部指令)(2)在MATLAB 指令窗中运行exm1151_1 就可获得题目所要求的图形用户界面。
11.5.2 利用'UserData' 属性编写用户界面函数文件【* 例11.5.2-1 】目标:利用M 函数文件创建与例11.4.3.3-1 相同的用户界面。
本例演示:如何依靠图形窗的'UserData' 属性传送用户控件的图柄,从而保证回调动作正确执行。
(1)编写M 函数文件exm1152_1.m 和calledit2.m[exm1152_1.m]function exm1152_1( )(这中间是:原exm11433_1.m 第〈1 〉行到第〈25 〉行的全部指令)set(hedit, 'callback' , 'calledit2' ); % 编辑框输入引起回调<26>set(hpop, 'callback' , 'calledit2' ); % 弹出框选择引起回调<27>set(hpush, 'callback' , 'calledit2' ); % 按键引起的回调<28>set(gcf, 'UserData' ,[hedit,hpop,hlist])[calledit2.m]function calledit2( )H=get(gcf, 'UserData' );ct=get(H(1), 'string' ); % 获得输入的字符串函数<2>vpop=get(H(2), 'value' ); % 获得选项的位置标识<3>vlist=get(H(3), 'value' ); % 获得选项位置向量<4>(下面续接内容是:原calledit.m第〈5 〉行以下的全部指令)(2)在MATLAB 指令窗中运行exm1152_1 就可获得题目所要求的图形用户界面。
HDL Coder详细教程
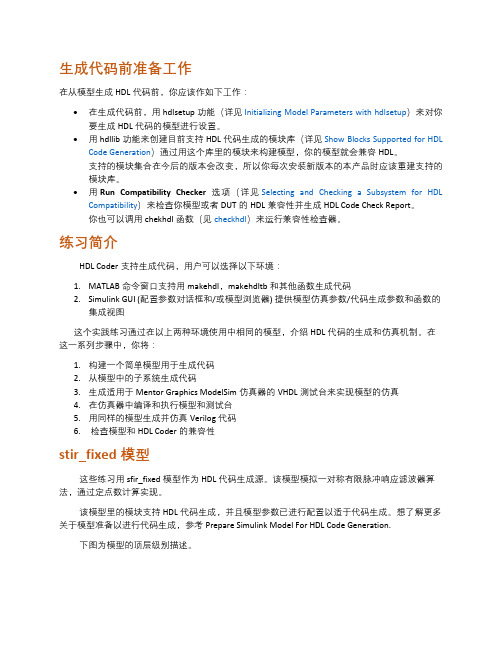
生成代码前准备工作在从模型生成HDL代码前,你应该作如下工作:•在生成代码前,用hdlsetup功能(详见Initializing Model Parameters with hdlsetup)来对你要生成HDL代码的模型进行设置。
•用hdllib功能来创建目前支持HDL代码生成的模块库(详见Show Blocks Supported for HDL Code Generation)通过用这个库里的模块来构建模型,你的模型就会兼容HDL。
支持的模块集合在今后的版本会改变,所以你每次安装新版本的本产品时应该重建支持的模块库。
•用Run Compatibility Checker选项(详见Selecting and Checking a Subsystem for HDL Compatibility)来检查你模型或者DUT的HDL兼容性并生成HDL Code Check Report。
你也可以调用chekhdl函数(见checkhdl)来运行兼容性检查器。
练习简介HDL Coder支持生成代码,用户可以选择以下环境:1.MATLAB命令窗口支持用makehdl,makehdltb和其他函数生成代码2.Simulink GUI (配置参数对话框和/或模型浏览器) 提供模型仿真参数/代码生成参数和函数的集成视图这个实践练习通过在以上两种环境使用中相同的模型,介绍HDL代码的生成和仿真机制。
在这一系列步骤中,你将:1.构建一个简单模型用于生成代码2.从模型中的子系统生成代码3.生成适用于Mentor Graphics ModelSim仿真器的VHDL测试台来实现模型的仿真4.在仿真器中编译和执行模型和测试台5.用同样的模型生成并仿真Verilog代码6.检查模型和HDL Coder的兼容性stir_fixed模型这些练习用sfir_fixed模型作为HDL代码生成源。
该模型模拟一对称有限脉冲响应滤波器算法,通过定点数计算实现。
基于Matlab模糊控制器HDL代码的自动生成

基于Matlab模糊控制器HDL代码的自动生成诸葛俊贵【期刊名称】《电子科技》【年(卷),期】2012(025)001【摘要】This article, taking the Water Level Control in a Tank as an example, proposes a fuzzy controller automatic HDL code generation method based on Matlab. The generated code can be ported to the FPGA control system. The method is divided into four steps :( 1 ) The fuzzy controller is designed using Fuzzy Logic Toolbox in the Matlab. (2) The fuzzy controller is transformed into the form of Lookup Table. (3) The controller Lookup table is implemented with the state machine. (4) The fuzzy controller implementation with state machine was translated into HDL code by HDL Coder.%以水箱液位控制为例,提出了一种基于Maflab的模糊控制器HDL代码自动生成方法,生成的代码可以移植到FPGA控制系统上。
该方法分4个步骤:(1)利用Maflab的FuzzyLogic工具箱设计模糊控制器。
(2)将模糊控制器转换为LookupTable的形式。
(3)将制作好的控制器查找表用状态机实现。
(4)用HDLCoder将状态机实现的模糊控制器翻译成HDL代码。
Matlab Coder的基本使用
权利声明:本文系雷声天下个人学习所用,将Mathworks公司高级工程师Loren的日志翻译成中文,与大家分享。
喜欢Matlab的同学可以好好学习一下。
不可以被用作商业利用啊,违者必究!!!本文的问题:Matlab Coder的基本使用Matlab的C语言自动生成(一)Matlab 2 C语言简史:2011年4月Mathworks公司将Matlab的M2C语言生成功能作为一个独立的产品推出,这个功能是的我们可以从Matlab算法生成可读的、端口模块化的、订制的C代码。
其实Matlab 的老用户们不觉得这是什么新鲜的功能,下面我们给出这个功能的日程表2004 在Simulink中添加了Embeded Matlab Function 模块2007 在Real-Time Workshop中添加了emlc函数,现在称其为Simulink Coder用于生成独立的C代码2011 发布了Matlab Coder,第一个独立的产品,用于从Matlab代码中生成独立的、可读的、模块化的C代码代码生成样例:下面给出一个简单的代码生成样例:我们手中有这样一个函数文件名称为simpleProduct.m1 function c = simpleProduct(a,b) %#codegen2 c = a*b;为了将这个函数生成C文件,需要提前将文件中的输入、输出参数的维数进行指定,这时候可以以实用Matlab提供的Matlab Coder UI辅助设计如图表1所示:图表1 启动Matlab Coder UI并且按照引导生成新的功能,首先如图表2和图表3所示建立新的工程图表2 建立工程图表3 添加要生成的文件并且选择类型导入文件成功后采用功能,对其中的参数定标,确定数据的类型和维数图表4 确定参数的类型和维数图表5 参数修改结果点击Build界面开始生成代码图表6 生成代码图表7代码生成成功代码生成成功后就可以,查看代码并且可以查看相应的报告图表8 相应的报告在报告当中可以看到有哪些函数的生成了同样的还可以采用这个工具包生成MEX文件让我们开始回顾这个过程:1 首先我们开始准备文件有可能Matlab的某些函数不在支持转化范围,需要你重新调整算法才是2 验证和测试,请你生成一个MEX函数文件来测试是否你生成的M函数是正确的。
matlab2009a破解 license 复制 保存

matlab2009a破解license 复制保存2011-05-13 08:26:36| 分类:默认分类 | 标签:matlab 2009a license |举报|字号订阅matlab2009a破解默认分类 2009-11-19 11:55:25 阅读365 评论2 字号:大中小订阅we offer you two ways to license matlab r2009a:standalone1) choose "install manually without using the internet"2) enter the "file installation key"11111-11111-02011-442703) use "license_standalone.dat" when asked for license filenetwork1) choose "install manually without using the internet"2) enter the "file installation key"11111-11111-02011-067173) if neccessary install "license manager"4) use "license_server.dat" when asked for license fileenjoy !lic_standalone.dat# MATLAB license passcode file for use with FLEXlm.# LicenseNo: 161051 HostID: ANYINCREMENT MATLAB MLM 21 11-nov-2017 uncounted 70B010*******E0F63DF \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT SIMULINK MLM 21 11-nov-2017 uncounted 60F010708FE9740B26D5 \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT Control_Toolbox MLM 21 11-nov-2017 uncounted \INCREMENT Identification_Toolbox MLM 21 11-nov-2017 uncounted \60A090F0C708643C4C10 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Robust_Toolbox MLM 21 11-nov-2017 uncounted \301080A06360186D6C7B VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Optimization_Toolbox MLM 21 11-nov-2017 uncounted \B030A04030C7BB56EFD6 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Spline_Toolbox MLM 21 11-nov-2017 uncounted \A0D08010A7C9155A1609 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Signal_Toolbox MLM 21 11-nov-2017 uncounted \D080609062BA5F2AA58F VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Excel_Link MLM 21 11-nov-2017 uncounted \F04020A0D7C1FF592E72 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT MAP_Toolbox MLM 21 11-nov-2017 uncounted \508020901523F39E989E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Neural_Network_Toolbox MLM 21 11-nov-2017 uncounted \3070E0E0705C02F54B3D VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Real-Time_Workshop MLM 21 11-nov-2017 uncounted \00A030C0CBE13E3B8C97 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Symbolic_Toolbox MLM 21 11-nov-2017 uncounted \B03010D0768D2DFF659E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Image_Toolbox MLM 21 11-nov-2017 uncounted \408030E072D108473A9C VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Statistics_Toolbox MLM 21 11-nov-2017 uncounted \SN=161051 TS_OKINCREMENT MPC_Toolbox MLM 21 11-nov-2017 uncounted \B0C0D0F0B05DEC3B6653 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Fuzzy_Toolbox MLM 21 11-nov-2017 uncounted \A05040B009B11F0CE3A2 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Signal_Blocks MLM 21 11-nov-2017 uncounted \205030109B73F885D04F VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Fixed-Point_Blocks MLM 21 11-nov-2017 uncounted \E08060C02ACBED3F99FA VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Compiler MLM 21 11-nov-2017 uncounted 10B0D0F0EFC74F00F1AE \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT Financial_Toolbox MLM 21 11-nov-2017 uncounted \E0B0D0302C465EF890AE VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT PDE_Toolbox MLM 21 11-nov-2017 uncounted \30306040B86DFB24E4CF VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Wavelet_Toolbox MLM 21 11-nov-2017 uncounted \70E050601CB6F7DB5C8E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Communication_Toolbox MLM 21 11-nov-2017 uncounted \509020804A48DC95743E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Stateflow MLM 21 11-nov-2017 uncounted 7000A0D07477AFB9FDE5 \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT Stateflow_Coder MLM 21 11-nov-2017 uncounted \E070F070488414C4BE28 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Power_System_Blocks MLM 21 11-nov-2017 uncounted \B050F050822821768986 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \INCREMENT Database_Toolbox MLM 21 11-nov-2017 uncounted \807070F073F7F6624579 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT MATLAB_Report_Gen MLM 21 11-nov-2017 uncounted \50E0D04006F806320F4D VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT SIMULINK_Report_Gen MLM 21 11-nov-2017 uncounted \A0C020A0D3C840239816 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Dial_and_Gauge_Blocks MLM 21 11-nov-2017 uncounted \4060B090678C9B118A5C VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Data_Acq_Toolbox MLM 21 11-nov-2017 uncounted \203070C08CA0361B08E2 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Real-Time_Win_Target MLM 21 11-nov-2017 uncounted \40802080260A5D930CCA VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Datafeed_Toolbox MLM 21 11-nov-2017 uncounted \B030D040A276F8448F5A VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Filter_Design_Toolbox MLM 21 11-nov-2017 uncounted \E0F050D05D25229C89B5 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT XPC_Target MLM 21 11-nov-2017 uncounted \C0308080E10CF87BC023 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Fin_Derivatives_Toolbox MLM 21 11-nov-2017 uncounted \B00060F03607D8BE6A54 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Communication_Blocks MLM 21 11-nov-2017 uncounted \70C020803C7CCB588150 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Curve_Fitting_Toolbox MLM 21 11-nov-2017 uncounted \SN=161051 TS_OKINCREMENT Instr_Control_Toolbox MLM 21 11-nov-2017 uncounted \D0*******C13FC882EB1 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT XPC_Embedded_Option MLM 21 11-nov-2017 uncounted \C010*******BA7BAD963 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT SimMechanics MLM 21 11-nov-2017 uncounted \C050B000D29D80180DEF VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT RTW_Embedded_Coder MLM 21 11-nov-2017 uncounted \3070B0A024AA79D797FA VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Virtual_Reality_Toolbox MLM 21 11-nov-2017 uncounted \7050A0404DD10931A57A VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT MATLAB_Excel_Builder MLM 21 11-nov-2017 uncounted \10505000768F4CA14087 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT MBC_Toolbox MLM 21 11-nov-2017 uncounted \90C0A0505027B8C3F005 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Embedded_Target_MPC555 MLM 21 11-nov-2017 uncounted \ 005030B0677326386E6A VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Aerospace_Blockset MLM 21 11-nov-2017 uncounted \403060109C83CD263741 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Embedded_Target_c6000 MLM 21 11-nov-2017 uncounted \60206070510E50DB80F9 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT MATLAB_Link_for_CCS MLM 21 11-nov-2017 uncounted \E03060008B012A1BE28C VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OK7050B0C0B493DA49F2CD VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT SystemTest MLM 21 11-nov-2017 uncounted \90E090207E7564CE5825 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Image_Acquisition_Toolbox MLM 21 11-nov-2017 uncounted \C0A01080F86293E60780 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Simulink_Design_Optim MLM 21 11-nov-2017 uncounted \30F01020D2088CA825E8 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Distrib_Computing_Toolbox MLM 21 11-nov-2017 uncounted \E070D0702B6494F86B3E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Fixed_Income_Toolbox MLM 21 11-nov-2017 uncounted \604080C0D53607AC62CA VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Link_for_ModelSim MLM 21 11-nov-2017 uncounted \7050C0609B7592DCE8B9 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Bioinformatics_Toolbox MLM 21 11-nov-2017 uncounted \10D0B0301E85124A41D6 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Embedded_Target_c2000 MLM 21 11-nov-2017 uncounted \9020D070AD0ED41750ED VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT Simulink_Control_Design MLM 21 11-nov-2017 uncounted \40B0809057726703222B VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT RF_Toolbox MLM 21 11-nov-2017 uncounted \80B0E07067377BB9CB53 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \ SN=161051 TS_OKINCREMENT RF_Blockset MLM 21 11-nov-2017 uncounted \C0908********F09E0CA VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \INCREMENT Filter_Design_HDL_Coder MLM 21 11-nov-2017 uncounted \6050402080476EDF9A61 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT OPC_Toolbox MLM 21 11-nov-2017 uncounted \5020E010303D96899697 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT GADS_Toolbox MLM 21 11-nov-2017 uncounted \F0B010D0ADD284DE5392 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Fixed_Point_Toolbox MLM 21 11-nov-2017 uncounted \A04080403F2EC514B74F VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT SL_Verification_Validation MLM 21 11-nov-2017 uncounted \90F0D0605A68CA0AB655 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT MATLAB_Distrib_Comp_Engine MLM 21 11-nov-2017 uncounted \F0C070B0FB38314A2EFD VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT SimDriveline MLM 21 11-nov-2017 uncounted \3010A0E02337A057214B VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Video_and_Image_Blockset MLM 21 11-nov-2017 uncounted \50D0B0B08AFD3C8FD1DB VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT MATLAB_Builder_for_Java MLM 21 11-nov-2017 uncounted \B0E0C0B05599BB4D4C61 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT SimEvents MLM 21 11-nov-2017 uncounted 1050E0F0B506B082331E \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT Simulink_HDL_Coder MLM 21 11-nov-2017 uncounted \80B0D0C0278E8D6AA346 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT SimBiology MLM 21 11-nov-2017 uncounted \8040F0A043457193D0B8 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \INCREMENT Simscape MLM 21 11-nov-2017 uncounted 4000905022AA94B94983 \ VENDOR_STRING=VI=0:AT=186 HOSTID=ANY SN=161051 TS_OK INCREMENT SimHydraulics MLM 21 11-nov-2017 uncounted \F000E0D000F25A4E9AFB VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT MATLAB_Builder_for_dot_Net MLM 21 11-nov-2017 uncounted \C010E010805DA64EB502 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Link_for_Tasking MLM 21 11-nov-2017 uncounted \C0404070C8CA456CAEEC VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Aerospace_Toolbox MLM 21 11-nov-2017 uncounted \3000B0507FF98E04F56E VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Link_for_Incisive MLM 21 11-nov-2017 uncounted \E040D0D07CE1CA9FCDFE VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Simulink_Design_Verifier MLM 21 11-nov-2017 uncounted \9060D020E7E5FBE6E673 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Link_for_VisualDSP MLM 21 11-nov-2017 uncounted \80809070524874706DFC VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT IDE_Link_MU MLM 21 11-nov-2017 uncounted \309010B04A163C0E356B VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT SimElectronics MLM 21 11-nov-2017 uncounted \808000705AA46D66933F VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT EDA_Simulator_Link_DS MLM 21 11-nov-2017 uncounted \802080B00B6276244747 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKINCREMENT Econometrics_Toolbox MLM 21 11-nov-2017 uncounted \201030E0928DCB375650 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \INCREMENT Vehicle_Network_Toolbox MLM 21 11-nov-2017 uncounted \30A070B0BA215E464202 VENDOR_STRING=VI=0:AT=186 HOSTID=ANY \SN=161051 TS_OKlic_server.dat# MATLAB license passcode file for use with FLEXlm.# LicenseNo: 161051 HostID: ANYDAEMON MLMUSE_SERVERINCREMENT MATLAB MLM 21 11-nov-2017 2011 30D070E03E0F158C8BDC DUP_GROUP=UH \SN=161051 TS_OKINCREMENT SIMULINK MLM 21 11-nov-2017 2011 607030B0BD8E74C1CE20DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Control_Toolbox MLM 21 11-nov-2017 2011 B0C05000DE03596BE0CD \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Identification_Toolbox MLM 21 11-nov-2017 2011 F060D0C09914D471493B \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Robust_Toolbox MLM 21 11-nov-2017 2011 E0D0E05062F43A27BDFC \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Optimization_Toolbox MLM 21 11-nov-2017 2011 2060A0503804BEF6CC59 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Spline_Toolbox MLM 21 11-nov-2017 2011 C090C0D070940139DFA3 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Signal_Toolbox MLM 21 11-nov-2017 2011 E01000C0195DDD33D174 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Excel_Link MLM 21 11-nov-2017 2011 D0E0B040FA8891D5A18DDUP_GROUP=UH \SN=161051 TS_OKINCREMENT MAP_Toolbox MLM 21 11-nov-2017 2011 A050A000E2CD76360FADDUP_GROUP=UH \INCREMENT Neural_Network_Toolbox MLM 21 11-nov-2017 2011 A040202071D838645CF3 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Real-Time_Workshop MLM 21 11-nov-2017 2011 F08080E0F7408E730864 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Symbolic_Toolbox MLM 21 11-nov-2017 2011 20D0704075D3E5898716 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Image_Toolbox MLM 21 11-nov-2017 2011 6090D05091378EC96DB8 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Statistics_Toolbox MLM 21 11-nov-2017 2011 C0E050D00BE1142650B7 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MPC_Toolbox MLM 21 11-nov-2017 2011 50D0502093295ED28A91DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Fuzzy_Toolbox MLM 21 11-nov-2017 2011 10B02040BAE49FCD8784 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Signal_Blocks MLM 21 11-nov-2017 2011 C010C0F0C60B936DA2DD \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Fixed-Point_Blocks MLM 21 11-nov-2017 2011 8080E090E9CFF26662B1 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Compiler MLM 21 11-nov-2017 2011 70B090A031F3DF155156 DUP_GROUP=UH \ SN=161051 TS_OKINCREMENT Financial_Toolbox MLM 21 11-nov-2017 2011 E09010A062C2622AF675 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT PDE_Toolbox MLM 21 11-nov-2017 2011 20F0401045C60A943198DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Wavelet_Toolbox MLM 21 11-nov-2017 2011 80A040F0773C7D766B88 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Communication_Toolbox MLM 21 11-nov-2017 2011 A0C020E0C5751820C9D7 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Stateflow MLM 21 11-nov-2017 2011 E090F0C041ECF73037F4 DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Stateflow_Coder MLM 21 11-nov-2017 2011 F010A0E0C8DA086FDE80 \INCREMENT Power_System_Blocks MLM 21 11-nov-2017 2011 F0E0F020506CA56675A0 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Database_Toolbox MLM 21 11-nov-2017 2011 E06010C0287C080AF16F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Report_Gen MLM 21 11-nov-2017 2011 A0E040607C4B47E731D2 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT SIMULINK_Report_Gen MLM 21 11-nov-2017 2011 D080D050D24B385D054E \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Dial_and_Gauge_Blocks MLM 21 11-nov-2017 2011 600070A0E16D6B0DFC4E \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Data_Acq_Toolbox MLM 21 11-nov-2017 2011 D060602079569962E2A2 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Real-Time_Win_Target MLM 21 11-nov-2017 2011 D0501070668166C373A3 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Datafeed_Toolbox MLM 21 11-nov-2017 2011 D090D0B03CCC55610F51 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Filter_Design_Toolbox MLM 21 11-nov-2017 2011 E0C050300ABEF305EC91 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT XPC_Target MLM 21 11-nov-2017 2011 2020B0D08B7D0DB7E9B6DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Fin_Derivatives_Toolbox MLM 21 11-nov-2017 2011 F0F020E0977A4649DB68 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Communication_Blocks MLM 21 11-nov-2017 2011 B0A0B0C0D741659FE9CD \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Curve_Fitting_Toolbox MLM 21 11-nov-2017 2011 A0A000805E3B3B563466 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Instr_Control_Toolbox MLM 21 11-nov-2017 2011 506050B0CFA25991670F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT XPC_Embedded_Option MLM 21 11-nov-2017 2011 F030E0E00AD704FB647D \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT SimMechanics MLM 21 11-nov-2017 2011 50B0D000850E3DB90FF9 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT RTW_Embedded_Coder MLM 21 11-nov-2017 2011 70C080107AD3A1457E4E \INCREMENT Virtual_Reality_Toolbox MLM 21 11-nov-2017 2011 00C0C0C08FA3F45094DC \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Excel_Builder MLM 21 11-nov-2017 2011 40307070CE2B921FC74F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MBC_Toolbox MLM 21 11-nov-2017 2011 B090F0C04143E8501095DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Embedded_Target_MPC555 MLM 21 11-nov-2017 2011 B07090D0B40AE7386C73 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Aerospace_Blockset MLM 21 11-nov-2017 2011 B02000802A9CD349E95B \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Embedded_Target_c6000 MLM 21 11-nov-2017 2011 206090805653554A1840 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Link_for_CCS MLM 21 11-nov-2017 2011 8000B090CC732141891F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Embedded_Target_c166 MLM 21 11-nov-2017 2011 700010F04B6C875E1F30 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT SystemTest MLM 21 11-nov-2017 2011 8050A0C01ABBC68A7676DUP_GROUP=UH \SN=161051 TS_OKINCREMENT Image_Acquisition_Toolbox MLM 21 11-nov-2017 2011 \E0C0B0C01E0DE0045817 DUP_GROUP=UH SN=161051 TS_OKINCREMENT Simulink_Design_Optim MLM 21 11-nov-2017 2011 403040702F8F3BD27CB3 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Distrib_Computing_Toolbox MLM 21 11-nov-2017 2011 \6000302080A58453FFD3 DUP_GROUP=UH SN=161051 TS_OKINCREMENT Fixed_Income_Toolbox MLM 21 11-nov-2017 2011 70A080C021B92B7F3FCB \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Link_for_ModelSim MLM 21 11-nov-2017 2011 A020*******F5504FA14 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Bioinformatics_Toolbox MLM 21 11-nov-2017 2011 20407040573AEB19550E \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Embedded_Target_c2000 MLM 21 11-nov-2017 2011 40E06080C6EB599EDC4C \INCREMENT Simulink_Control_Design MLM 21 11-nov-2017 2011 802040E0450F3D08D203 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT RF_Toolbox MLM 21 11-nov-2017 2011 70F01030A01C38F1B05DDUP_GROUP=UH \SN=161051 TS_OKINCREMENT RF_Blockset MLM 21 11-nov-2017 2011 707050B0F2BE9CE2964ADUP_GROUP=UH \SN=161051 TS_OKINCREMENT Filter_Design_HDL_Coder MLM 21 11-nov-2017 2011 9050D050AD595402D9BB \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT OPC_Toolbox MLM 21 11-nov-2017 2011 009050C0FF4342B2ACC7DUP_GROUP=UH \SN=161051 TS_OKINCREMENT GADS_Toolbox MLM 21 11-nov-2017 2011 4010200013300B3DED3F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Fixed_Point_Toolbox MLM 21 11-nov-2017 2011 7040A0C00EECFECACF43 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT SL_Verification_Validation MLM 21 11-nov-2017 2011 \007010902F3A10B42E11 DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Distrib_Comp_Engine MLM 21 11-nov-2017 2011 \50109020EC05E3A1EDB7 DUP_GROUP=UH SN=161051 TS_OKINCREMENT SimDriveline MLM 21 11-nov-2017 2011 0000B0503F32F510EB28 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Video_and_Image_Blockset MLM 21 11-nov-2017 2011 B0E010E0A490497CD73C \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Builder_for_Java MLM 21 11-nov-2017 2011 40A040D0AF00F059666F \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT SimEvents MLM 21 11-nov-2017 2011 7090B030DF75C75311DBDUP_GROUP=UH \SN=161051 TS_OKINCREMENT Simulink_HDL_Coder MLM 21 11-nov-2017 2011 A08050C0819E8542AB77 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT SimBiology MLM 21 11-nov-2017 2011 709030E082B5A397398BSN=161051 TS_OKINCREMENT Simscape MLM 21 11-nov-2017 2011 10C0B0F00279E252C0B2 DUP_GROUP=UH \SN=161051 TS_OKINCREMENT SimHydraulics MLM 21 11-nov-2017 2011 40D020F09FE57A877BD6 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT MATLAB_Builder_for_dot_Net MLM 21 11-nov-2017 2011 \D0E090B03E2BF9AB0AB8 DUP_GROUP=UH SN=161051 TS_OKINCREMENT Link_for_Tasking MLM 21 11-nov-2017 2011 909050E0004722C60B9F \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Aerospace_Toolbox MLM 21 11-nov-2017 2011 1060807091DEBA14386A \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Link_for_Incisive MLM 21 11-nov-2017 2011 F050F0304A374BE869B1 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Simulink_Design_Verifier MLM 21 11-nov-2017 2011 60100000BCCD62F69551 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Link_for_VisualDSP MLM 21 11-nov-2017 2011 F08080300CC1D5358638 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT IDE_Link_MU MLM 21 11-nov-2017 2011 50F0D0E0FC5D94008111DUP_GROUP=UH \SN=161051 TS_OKINCREMENT SimElectronics MLM 21 11-nov-2017 2011 70E050E0568AC5F1BE06 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT EDA_Simulator_Link_DS MLM 21 11-nov-2017 2011 2090E0B0F7714FFBBBC9 \ DUP_GROUP=UH SN=161051 TS_OKINCREMENT Econometrics_Toolbox MLM 21 11-nov-2017 2011 F0D0E0E0942EDFCC51D3 \DUP_GROUP=UH SN=161051 TS_OKINCREMENT Vehicle_Network_Toolbox MLM 21 11-nov-2017 2011 1000A00048EF61B74E8D \ DUP_GROUP=UH SN=161051 TS_OK。
Matlab Coder的基本使用
权利声明:本文系雷声天下个人学习所用,将Mathworks公司高级工程师Loren的日志翻译成中文,与大家分享。
喜欢Matlab的同学可以好好学习一下。
不可以被用作商业利用啊,违者必究!!!本文的问题:Matlab Coder的基本使用Matlab的C语言自动生成(一)Matlab 2 C语言简史:2011年4月Mathworks公司将Matlab的M2C语言生成功能作为一个独立的产品推出,这个功能是的我们可以从Matlab算法生成可读的、端口模块化的、订制的C代码。
其实Matlab 的老用户们不觉得这是什么新鲜的功能,下面我们给出这个功能的日程表2004 在Simulink中添加了Embeded Matlab Function 模块2007 在Real-Time Workshop中添加了emlc函数,现在称其为Simulink Coder用于生成独立的C代码2011 发布了Matlab Coder,第一个独立的产品,用于从Matlab代码中生成独立的、可读的、模块化的C代码代码生成样例:下面给出一个简单的代码生成样例:我们手中有这样一个函数文件名称为simpleProduct.m1 function c = simpleProduct(a,b) %#codegen2 c = a*b;为了将这个函数生成C文件,需要提前将文件中的输入、输出参数的维数进行指定,这时候可以以实用Matlab提供的Matlab Coder UI辅助设计如图表1所示:图表1 启动Matlab Coder UI并且按照引导生成新的功能,首先如图表2和图表3所示建立新的工程图表2 建立工程图表3 添加要生成的文件并且选择类型导入文件成功后采用功能,对其中的参数定标,确定数据的类型和维数图表4 确定参数的类型和维数图表5 参数修改结果点击Build界面开始生成代码图表6 生成代码图表7代码生成成功代码生成成功后就可以,查看代码并且可以查看相应的报告图表8 相应的报告在报告当中可以看到有哪些函数的生成了同样的还可以采用这个工具包生成MEX文件让我们开始回顾这个过程:1 首先我们开始准备文件有可能Matlab的某些函数不在支持转化范围,需要你重新调整算法才是2 验证和测试,请你生成一个MEX函数文件来测试是否你生成的M函数是正确的。
基于模型设计的FPGA开发与实现:Matlab中数字滤波器的设计与实现之基本流程
基于模型设计的FPGA开发与实现数字滤波器的设计与实现之基本流程数字滤波器辅助设计2011年6月26日11:18Author by McCrocodile/McCrocodile如何快速高效的设计数字滤波器时本章节的重点。
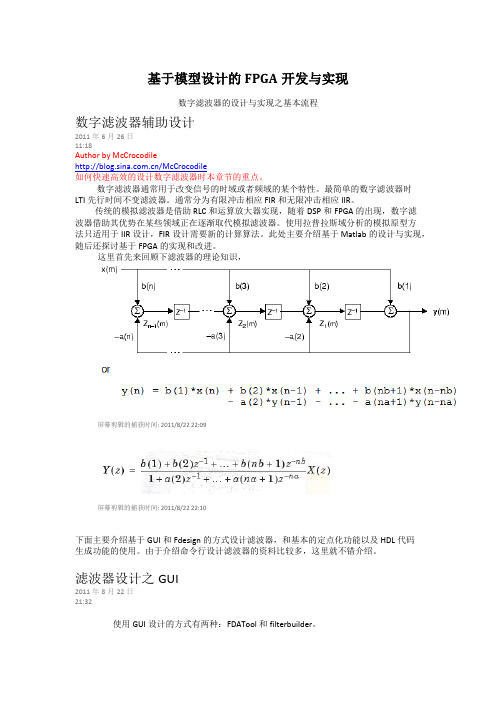
数字滤波器通常用于改变信号的时域或者频域的某个特性。
最简单的数字滤波器时LTI先行时间不变滤波器。
通常分为有限冲击相应FIR和无限冲击相应IIR。
传统的模拟滤波器是借助RLC和运算放大器实现,随着DSP和FPGA的出现,数字滤波器借助其优势在某些领域正在逐渐取代模拟滤波器。
使用拉普拉斯域分析的模拟原型方法只适用于IIR设计,FIR设计需要新的计算算法。
此处主要介绍基于Matlab的设计与实现,随后还探讨基于FPGA的实现和改进。
这里首先来回顾下滤波器的理论知识,屏幕剪辑的捕获时间: 2011/8/22 22:09屏幕剪辑的捕获时间: 2011/8/22 22:10下面主要介绍基于GUI和Fdesign的方式设计滤波器,和基本的定点化功能以及HDL代码生成功能的使用。
由于介绍命令行设计滤波器的资料比较多,这里就不错介绍。
滤波器设计之GUI2011年8月22日21:32使用GUI设计的方式有两种:FDATool 和filterbuilder。
FDATool设计实例:这儿以设计一个低通滤波器分离两个信号为例,介绍使用fdatool设计FIR滤波器。
要求:输入信号x1+x2,x1为100Hz正弦信号,x2为300Hz正弦信号,采样率为3KHz期望输出为x1.屏幕剪辑的捕获时间: 2011/8/22 22:38如上图所示为使用Equiripple等纹波法设计一个直接型FIR滤波器,Fs为采样率为3KHz,Fpass通带最大频率110Hz,Fstop阻带最小频率为230Hz,Apass通带纹波0.1dB,Astop阻带衰减60dB。
[通俗来讲可以认为是在0~230Hz,通带的纹波不会超过0.1dB,阻带从230Hz起最小衰减不小于60dB].下面是帮助文档中的描述,详细查阅帮助和其他参考资料了。
MatlabCoder的使用

MatlabCoder的使用Matlab Coder是一个将matlab代码转化为C/C++代码或dll、lib的工具,得到的代码或程序独立于Matlab,可以在其他工程中随意使用。
这样,如果碰到一些数学问题,比如矩阵运算、算法验证等,可以先用Matlab实现,然后方便地转化为源代码在各种应用中使用。
下面来介绍Coder的使用方法,内容参考自Matlab帮助文档。
Coder的使用主要基于3个组件:Matlab、Coder工具箱和C编译器。
一般安装好Matlab后,前两个是默认提供的(执行ver命令可快速查看Coder工具箱是否安装);C编译器默认有提供,但可根据自己的情况更换其他C编译器(Matlab推荐使用其他编译器,自带的性能不佳),具体可执行mex -setup进行编译器配置,如>> mex -setupMEX configured to use 'Microsoft Visual C++ 2013 Professional (C)' for C language compilation.Warning: The MATLAB C and Fortran API has changed to support MATLABvariables with more than 2^32-1 elements. In the near future you will be required to update your code to utilize thenew API. You can find more information about this at:/help/matlab/matlab_external/upgrading-mex-files-to-use-64-bit-api.html.To choose a different language, select one from the following: mex -setup C++mex -setup FORTRAN完成配置后,开始转换Matlab函数代码,例如下面函数,它实现了搜索banana函数的最小值位置,并计算矩阵A的行列式:TestCoderFcn.m% Test for Coderfunction [x, Adet] = TestCoderFcn(x0, p0, A)%#codegen% search minimumglobal pp = p0;x = fminsearch(@myfun, x0);% calculate detAdet = det(A);end% banana functionfunction f = myfun(x)global pf = 100*(x(2)-x(1)^2)^2+(p-x(1))^2;end使用代码main.m做效果测试:% 测试clcclearclose allx0 = [1,3];p0 = 2;A = [1 -2 4; -5 2 0; 1 0 3]; % det(A) = -32[x, Adet] = TestCoderFcn(x0, p0, A);fprintf('函数的极值出现在(%f, %f)\n', x)fprintf('矩阵的行列式为%f\n', Adet)测试结果为:函数的极值出现在(2.000005, 4.000021)矩阵的行列式为-32.000000在转化前,需要对代码进行3种检查:代码语法检查、代码可转换检查和运行时检查。
高阶低通滤波 matlab 导出 c语言

高阶低通滤波matlab 导出c语言全文共四篇示例,供读者参考第一篇示例:高阶低通滤波是信号处理中常用的一种滤波器,它可以帮助我们滤除信号中的高频噪声,使得信号更加平滑和清晰。
在实际应用中,我们经常需要将MATLAB 中设计好的高阶低通滤波器导出到C 语言环境中,以便在嵌入式系统或其他平台上使用。
本文将介绍如何在MATLAB 中设计高阶低通滤波器,并将其导出到C 语言代码中。
一、设计高阶低通滤波器在MATLAB 中设计高阶低通滤波器通常采用滤波器设计工具箱中提供的butter 函数。
这个函数可以根据指定的滤波器阶数和截止频率来设计一个巴特沃斯滤波器。
下面是一个简单的例子:```matlabfs = 1000; % 采样频率fc = 100; % 截止频率order = 4; % 滤波器阶数[b,a] = butter(order, fc/(fs/2), 'low');```在上面的例子中,我们首先指定了采样频率fs、截止频率fc 和滤波器的阶数order,然后调用butter 函数设计低通滤波器,并返回滤波器的系数b 和a。
接下来,我们可以使用这些系数来滤波信号,如下所示:```matlabfiltered_signal = filter(b, a, input_signal);```这样就可以得到滤波后的信号filtered_signal。
在MATLAB 中调试完善高阶低通滤波器后,我们就可以将其导出到C 语言代码中。
二、导出到C 语言代码在导出到C 语言代码之前,我们需要将滤波器的系数b 和a导出到一个头文件中,以便在C 语言代码中使用。
在MATLAB 中可以使用dspdata2c 函数将滤波器系数转换为C 语言代码,如下所示:```matlabdspdata2c(b, 'fir_coeffs.h', 'low_filter_coeffs', 'short', true);dspdata2c(a, 'fir_coeffs.h', 'low_filter_coeffs', 'short', false);```上面的代码将系数b 和a 分别保存到名为fir_coeffs.h 的头文件中,并分别定义为low_filter_coeffs_b 和low_filter_coeffs_a。
MATLAB 程序范例
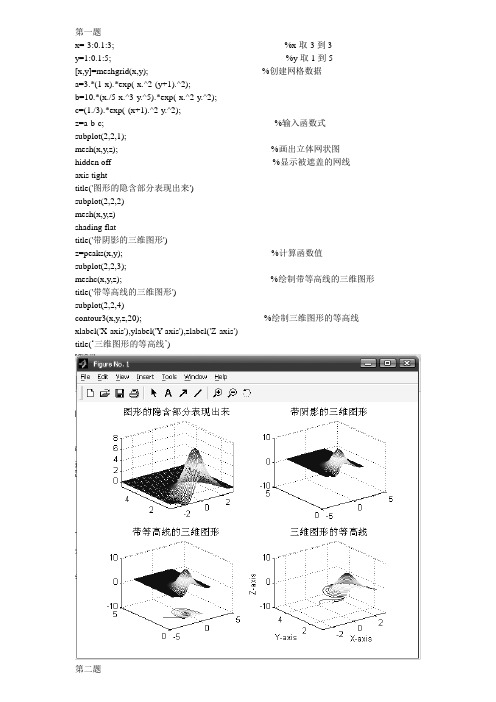
第一题x=-3:0.1:3; %x取-3到3y=1:0.1:5; %y取1到5[x,y]=meshgrid(x,y); %创建网格数据a=3.*(1-x).*exp(-x.^2-(y+1).^2);b=10.*(x./5-x.^3-y.^5).*exp(-x.^2-y.^2);c=(1./3).*exp(-(x+1).^2-y.^2);z=a-b-c; %输入函数式subplot(2,2,1);mesh(x,y,z); %画出立体网状图hidden off %显示被遮盖的网线axis tighttitle('图形的隐含部分表现出来')subplot(2,2,2)mesh(x,y,z)shading flattitle('带阴影的三维图形')z=peaks(x,y); %计算函数值subplot(2,2,3);meshc(x,y,z); %绘制带等高线的三维图形title('带等高线的三维图形')subplot(2,2,4)contour3(x,y,z,20); %绘制三维图形的等高线xlabel('X-axis'),ylabel('Y-axis'),zlabel('Z-axis')title(‘三维图形的等高线’)sum=0;for i=0:63,part=1;for j=1:i,part=2.^j;endfprintf('part(%d)=%d.\n',i,part); sum=sum+part;endsumsum=0;i=0;k=0;while i<63i=i+1;k=2.^i;sum=sum+kend>> part(0)=1.part(1)=2.part(2)=4.part(3)=8.part(4)=16.part(5)=32.part(6)=64.part(7)=128.part(8)=256.part(9)=512.part(10)=1024.part(11)=2048.part(12)=4096.part(13)=8192.part(14)=16384.part(15)=32768.part(16)=65536.part(17)=131072.part(18)=262144.part(19)=524288.part(20)=1048576.part(21)=2097152.part(22)=4194304.part(23)=8388608.part(24)=16777216.part(25)=33554432.part(26)=67108864.part(27)=134217728.part(28)=268435456.part(29)=536870912.part(30)=1073741824.part(34)=1.717987e+010. part(35)=3.435974e+010. part(36)=6.871948e+010. part(37)=1.374390e+011. part(38)=2.748779e+011. part(39)=5.497558e+011. part(40)=1.099512e+012. part(41)=2.199023e+012. part(42)=4.398047e+012. part(43)=8.796093e+012. part(44)=1.759219e+013. part(45)=3.518437e+013. part(46)=7.036874e+013. part(47)=1.407375e+014. part(48)=2.814750e+014. part(49)=5.629500e+014. part(50)=1.125900e+015. part(51)=2.251800e+015. part(52)=4.503600e+015. part(53)=9.007199e+015. part(54)=1.801440e+016. part(55)=3.602880e+016. part(56)=7.205759e+016. part(57)=1.441152e+017. part(58)=2.882304e+017. part(59)=5.764608e+017. part(60)=1.152922e+018. part(61)=2.305843e+018. part(62)=4.611686e+018. part(63)=9.223372e+018. sum =1.8447e+019sum =2sum =6sum =14sum =30sum =62sum =126sum =254sum =5102046 sum =4094 sum =8190 sum =16382 sum =32766 sum =65534 sum =131070 sum =262142 sum =524286 sum =1048574 sum =2097150 sum =4194302 sum =8388606 sum =16777214 sum =33554430 sum =67108862 sum =134217726 sum =268435454 sum =536870910 sum =1.0737e+009 sum =2.1475e+009 sum =4.2950e+009 sum =8.5899e+009 sum =1.7180e+010 sum =3.4360e+0105.4976e+011 sum =1.0995e+012 sum =2.1990e+012 sum =4.3980e+012 sum =8.7961e+012 sum =1.7592e+013 sum =3.5184e+013 sum =7.0369e+013 sum =1.4074e+014 sum =2.8147e+014 sum =5.6295e+014 sum =1.1259e+015 sum =2.2518e+015 sum =4.5036e+015 sum =9.0072e+015 sum =1.8014e+016 sum =3.6029e+016 sum =7.2058e+016 sum =1.4412e+017 sum =2.8823e+017 sum =5.7646e+017 sum =1.1529e+018 sum =2.3058e+018A=[4,12,20;12,45,78;20,78,136] %输入矩阵A入B=[1,2,3;4,5,6;7,8,9] %输入矩阵BI=eye(3) %输入单位矩阵IA+5*BA-B*IA.*B %矩阵A、B内元素对元素的相乘运算A*B %进行矩阵相乘运算A.^B %矩阵A、B中元素对元素进行指数运算A/B %矩阵A右除矩阵BA\B %矩阵A左除矩阵BA =4 12 2012 45 7820 78 136B =1 2 34 5 67 8 9I =1 0 00 1 00 0 1ans =9 22 3532 70 10855 118 181ans =3 10 178 40 7213 70 127ans =4 24 6048 225 468140 624 1224ans =192 228 264738 873 10081284 1518 1752ans =1.0e+019 *0.0000 0.0000 0.00000.0000 0.0000 0.00000.0000 0.0001 1.5917Warning: Matrix is singular to working precision.> In C:\Documents and Settings\Administrator\桌面\c.m at line 9Inf Inf InfWarning: Matrix is singular to working precision.> In C:\Documents and Settings\Administrator\桌面\c.m at line 10ans =Inf Inf InfInf Inf InfInf Inf Inf第四题t=-1:0.025:1 %对t的取值,步长为0.025x=sin(t.^-1) %输入函数plot(x,'-m')t =Columns 1 through 15-1.0000 -0.9750 -0.9500 -0.9250 -0.9000 -0.8750 -0.8500 -0.8250 -0.8000 -0.7750 -0.7500 -0.7250 -0.7000 -0.6750 -0.6500Columns 16 through 30-0.6250 -0.6000 -0.5750 -0.5500 -0.5250 -0.5000 -0.4750 -0.4500 -0.4250 -0.4000 -0.3750 -0.3500 -0.3250 -0.3000 -0.2750Columns 31 through 45-0.2500 -0.2250 -0.2000 -0.1750 -0.1500 -0.1250 -0.1000 -0.0750 -0.0500 -0.0250 0 0.0250 0.0500 0.0750 0.1000Columns 46 through 600.1250 0.1500 0.1750 0.2000 0.2250 0.2500 0.2750 0.3000 0.3250 0.3500 0.3750 0.4000 0.4250 0.4500 0.4750Columns 61 through 750.5000 0.5250 0.5500 0.5750 0.6000 0.6250 0.6500 0.6750 0.7000 0.7250 0.7500 0.7750 0.8000 0.8250 0.8500Columns 76 through 810.8750 0.9000 0.9250 0.9500 0.9750 1.0000x =Columns 1 through 15-0.8415 -0.8550 -0.8687 -0.8825 -0.8962 -0.9098 -0.9233 -0.9364 -0.9490 -0.9609 -0.9719 -0.9817 -0.9899 -0.9960 -0.9995Columns 16 through 30-0.9996 -0.9954 -0.9859 -0.9696 -0.9447 -0.9093 -0.8605 -0.7952 -0.7094 -0.5985 -0.4573 -0.2806 -0.0646 0.1906 0.4748Columns 31 through 450.7568 0.9643 0.9589 0.5387 -0.3742 -0.9894 0.5440 -0.6940 -0.9129 -0.7451 NaN 0.7451 0.9129 0.6940 -0.5440Columns 46 through 600.9894 0.3742 -0.5387 -0.9589 -0.9643 -0.7568 -0.4748 -0.1906 0.0646 0.2806 0.4573 0.5985 0.7094 0.7952 0.8605Columns 61 through 750.9093 0.9447 0.9696 0.9859 0.9954 0.9996 0.9995 0.9960 0.9899 0.9817 0.9719 0.9609 0.9490 0.9364 0.9233Columns 76 through 810.9098 0.8962 0.8825 0.8687 0.8550 0.8415t=-pi:pi/100:pi %给出t的取值范围,步长为pi/100t =-2.6704 -2.6389 -2.6075 -2.5761 -2.5447 -2.5133 -2.4819 -2.4504 -2.4190 -2.3876 -2.3562 -2.3248 -2.2934 -2.2619 -2.2305Columns 31 through 45-2.1991 -2.1677 -2.1363 -2.1049 -2.0735 -2.0420 -2.0106 -1.9792 -1.9478 -1.9164 -1.8850 -1.8535 -1.8221 -1.7907 -1.7593Columns 46 through 60-1.7279 -1.6965 -1.6650 -1.6336 -1.6022 -1.5708 -1.5394 -1.5080 -1.4765 -1.4451 -1.4137 -1.3823 -1.3509 -1.3195 -1.2881Columns 61 through 75-1.2566 -1.2252 -1.1938 -1.1624 -1.1310 -1.0996 -1.0681 -1.0367 -1.0053 -0.9739 -0.9425 -0.9111 -0.8796 -0.8482 -0.8168Columns 76 through 90-0.7854 -0.7540 -0.7226 -0.6912 -0.6597 -0.6283 -0.5969 -0.5655 -0.5341 -0.5027 -0.4712 -0.4398 -0.4084 -0.3770 -0.3456Columns 91 through 105-0.3142 -0.2827 -0.2513 -0.2199 -0.1885 -0.1571 -0.1257 -0.0942 -0.0628 -0.0314 0 0.0314 0.0628 0.0942 0.1257Columns 106 through 1200.1571 0.1885 0.2199 0.2513 0.2827 0.3142 0.3456 0.3770 0.4084 0.4398 0.4712 0.5027 0.5341 0.5655 0.5969Columns 121 through 1350.6283 0.6597 0.6912 0.7226 0.7540 0.7854 0.8168 0.8482 0.8796 0.9111 0.9425 0.9739 1.0053 1.0367 1.0681Columns 136 through 1501.0996 1.1310 1.1624 1.1938 1.2252 1.2566 1.2881 1.3195 1.3509 1.3823 1.4137 1.4451 1.4765 1.5080 1.5394Columns 151 through 1651.5708 1.6022 1.6336 1.6650 1.6965 1.7279 1.7593 1.7907 1.8221 1.8535 1.8850 1.9164 1.9478 1.97922.0106Columns 166 through 1802.0420 2.0735 2.1049 2.1363 2.1677 2.1991 2.2305 2.2619 2.2934 2.3248 2.3562 2.3876 2.4190 2.4504 2.4819Columns 181 through 1952.5133 2.5447 2.5761 2.6075 2.6389 2.6704 2.7018 2.7332 2.7646 2.7960 2.8274 2.8588 2.8903 2.9217 2.9531Columns 196 through 2012.98453.0159 3.0473 3.0788 3.1102 3.1416>>(2)x=sin(tan(t))-tan(sin(t)) %输入函数x =Columns 1 through 150.0000 0.0628 0.1257 0.1888 0.2520 0.3154 0.3792 0.4433 0.5079 0.5729 0.6385 0.7046 0.7714 0.8388 0.9069Columns 16 through 300.9757 1.0453 1.1156 1.1866 1.2583 1.3306 1.4035 1.47661.5500 1.6232 1.6960 1.7678 1.8380 1.9059 1.9702Columns 31 through 452.0296 2.0821 2.1254 2.1561 2.1700 2.1614 2.1230 2.0456 1.9179 1.7278 1.4654 1.1333 0.7708 0.5062 0.63541.3376 1.0158 0.7626 0.5687 0.4225 0.3129 0.2312 0.1705 0.1254 0.0920 0.0672 0.0489 0.0355 0.0256 0.0183Columns 76 through 900.0130 0.0092 0.0064 0.0045 0.0031 0.0021 0.0014 0.0009 0.0006 0.0004 0.0002 0.0001 0.0001 0.0000 0.0000Columns 91 through 1050.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0 -0.0000 -0.0000 -0.0000 -0.0000Columns 106 through 120-0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0001 -0.0001 -0.0002 -0.0004 -0.0006 -0.0009 -0.0014Columns 121 through 135-0.0021 -0.0031 -0.0045 -0.0064 -0.0092 -0.0130 -0.0183 -0.0256 -0.0355 -0.0489 -0.0672 -0.0920 -0.1254 -0.1705 -0.2312Columns 136 through 150-0.3129 -0.4225 -0.5687 -0.7626 -1.0158 -1.3376 -1.7252 -2.1387 -2.4495 -2.3613 -1.4855 -0.5326 -2.4567 -1.7362 -1.1621Columns 151 through 165-1.1510 -1.9494 -1.3652 -0.6279 -2.5288 -1.5466 -0.6354 -0.5062 -0.7708 -1.1333 -1.4654 -1.7278 -1.9179 -2.0456 -2.1230Columns 166 through 180-2.1614 -2.1700 -2.1561 -2.1254 -2.0821 -2.0296 -1.9702 -1.9059 -1.8380 -1.7678 -1.6960 -1.6232 -1.5500 -1.4766 -1.4035Columns 181 through 195-1.3306 -1.2583 -1.1866 -1.1156 -1.0453 -0.9757 -0.9069 -0.8388 -0.7714 -0.7046 -0.6385 -0.5729 -0.5079 -0.4433 -0.3792Columns 196 through 201-0.3154 -0.2520 -0.1888 -0.1257 -0.0628 -0.0000>> plot(x,'-y') %用黄色的细实线画出图形>>t =Columns 1 through 15-3.1416 -3.1102 -3.0788 -3.0473 -3.0159 -2.9845 -2.9531 -2.9217 -2.8903 -2.8588 -2.8274 -2.7960 -2.7646 -2.7332 -2.7018Columns 16 through 30-2.6704 -2.6389 -2.6075 -2.5761 -2.5447 -2.5133 -2.4819 -2.4504 -2.4190 -2.3876 -2.3562 -2.3248 -2.2934 -2.2619 -2.2305Columns 31 through 45-2.1991 -2.1677 -2.1363 -2.1049 -2.0735 -2.0420 -2.0106 -1.9792 -1.9478 -1.9164 -1.8850 -1.8535 -1.8221 -1.7907 -1.7593Columns 46 through 60-1.7279 -1.6965 -1.6650 -1.6336 -1.6022 -1.5708 -1.5394 -1.5080 -1.4765 -1.4451 -1.4137 -1.3823 -1.3509 -1.3195 -1.2881Columns 61 through 75-1.2566 -1.2252 -1.1938 -1.1624 -1.1310 -1.0996 -1.0681 -1.0367 -1.0053 -0.9739 -0.9425 -0.9111 -0.8796 -0.8482 -0.8168Columns 76 through 90-0.7854 -0.7540 -0.7226 -0.6912 -0.6597 -0.6283 -0.5969 -0.5655-0.0628 -0.0314 0 0.0314 0.0628 0.0942 0.1257Columns 106 through 1200.1571 0.1885 0.2199 0.2513 0.2827 0.3142 0.3456 0.3770 0.4084 0.4398 0.4712 0.5027 0.5341 0.5655 0.5969Columns 121 through 1350.6283 0.6597 0.6912 0.7226 0.7540 0.7854 0.8168 0.8482 0.8796 0.9111 0.9425 0.9739 1.0053 1.0367 1.0681Columns 136 through 1501.0996 1.1310 1.1624 1.1938 1.2252 1.2566 1.2881 1.3195 1.3509 1.3823 1.4137 1.4451 1.4765 1.5080 1.5394Columns 151 through 1651.5708 1.6022 1.6336 1.6650 1.6965 1.7279 1.7593 1.7907 1.8221 1.8535 1.8850 1.9164 1.9478 1.97922.0106Columns 166 through 1802.0420 2.0735 2.1049 2.1363 2.1677 2.1991 2.2305 2.2619 2.2934 2.3248 2.3562 2.3876 2.4190 2.4504 2.4819Columns 181 through 1952.5133 2.5447 2.5761 2.6075 2.6389 2.6704 2.7018 2.7332 2.7646 2.7960 2.8274 2.8588 2.8903 2.9217 2.9531Columns 196 through 2012.98453.0159 3.0473 3.0788 3.1102 3.1416x =Columns 1 through 150.0000 0.0628 0.1257 0.1888 0.2520 0.3154 0.3792 0.4433 0.5079 0.5729 0.6385 0.7046 0.7714 0.8388 0.9069Columns 16 through 300.9757 1.0453 1.1156 1.1866 1.2583 1.3306 1.4035 1.47661.5500 1.6232 1.6960 1.7678 1.8380 1.9059 1.9702Columns 31 through 452.0296 2.0821 2.1254 2.1561 2.1700 2.1614 2.1230 2.0456 1.9179 1.7278 1.4654 1.1333 0.7708 0.5062 0.6354Columns 46 through 601.54662.5288 0.6279 1.3652 1.9494 1.1510 1.1621 1.73622.4567 0.5326 1.4855 2.3613 2.4495 2.1387 1.7252Columns 61 through 751.3376 1.0158 0.7626 0.5687 0.4225 0.3129 0.2312 0.1705 0.1254 0.0920 0.0672 0.0489 0.0355 0.0256 0.0183Columns 76 through 900.0130 0.0092 0.0064 0.0045 0.0031 0.0021 0.0014 0.0009 0.0006 0.0004 0.0002 0.0001 0.0001 0.0000 0.0000Columns 91 through 1050.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0 -0.0000 -0.0000 -0.0000 -0.0000Columns 106 through 120-0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0000 -0.0001 -0.0001 -0.0002 -0.0004 -0.0006 -0.0009 -0.0014Columns 121 through 135-0.0021 -0.0031 -0.0045 -0.0064 -0.0092 -0.0130 -0.0183 -0.0256 -0.0355 -0.0489 -0.0672 -0.0920 -0.1254 -0.1705 -0.2312Columns 151 through 165-1.1510 -1.9494 -1.3652 -0.6279 -2.5288 -1.5466 -0.6354 -0.5062 -0.7708 -1.1333 -1.4654 -1.7278 -1.9179 -2.0456 -2.1230Columns 166 through 180-2.1614 -2.1700 -2.1561 -2.1254 -2.0821 -2.0296 -1.9702 -1.9059 -1.8380 -1.7678 -1.6960 -1.6232 -1.5500 -1.4766 -1.4035Columns 181 through 195-1.3306 -1.2583 -1.1866 -1.1156 -1.0453 -0.9757 -0.9069 -0.8388 -0.7714 -0.7046 -0.6385 -0.5729 -0.5079 -0.4433 -0.3792Columns 196 through 201-0.3154 -0.2520 -0.1888 -0.1257 -0.0628 -0.0000第五题A=[7.5,3.5,0,0;8,22,4.1,0;0,9,103,-1.5;0,0,3.7,19.3]B=[5,7,6,5;7,10,8,7;6,8,10,9;5,7,9,10]DA=det(A) %求解矩阵A的值DB=det(B) %求解矩阵B的值tA=trace(A) %求解矩阵A的迹tB=trace(B) %求解矩阵B的迹rA=rank(A) %求解矩阵A的秩rB=rank(B) %求解矩阵B的秩pA=poly(A) %求解矩阵A的特征多项式pB=poly(B) %求解矩阵B的特征多项式A =7.5000 3.5000 0 08.0000 22.0000 4.1000 00 9.0000 103.0000 -1.50000 0 3.7000 19.3000B =5 76 57 10 8 76 8 10 95 7 9 10DA =2.6776e+005DB =1tA=151.8000tB =35rA =4rB =4pA =1.0e+005 *0.0000 -0.0015 0.0570 -0.7457 2.6776pB =1.0000 -35.0000 146.0000 -100.0000 1.0000第六题A=[7,2,1,-2;9,15,3,-2;-2,-2,11,5;1,3,2,13]A =7 2 1 -29 15 3 -2-2 -2 11 51 32 13>> b=[4,7,-1,0]'b =47-1>> x=A\bx =0.49790.14450.0629-0.0813>> ra=rank(A) %A的秩ra =4>> rab=rank([A,b]) %看b是否在A的列空间中rab =4xs=A\b; %求出特解xg=null(A); %求出奇次方程解c=rand(1); %随机数ba=A*(xs+c*xg); %计算A与“一个随机的全解”的乘积ba norm(ba-b) %检查ba与b的接近程度第七题syms x %生成符号变量f0=sym(sin(x)/x) %建立符号表达式int(f0,x,0,2) %计算表达式f0在变量x从0到2的定积分syms xa=1/((x-0.3).^2+0.01);b=1/((x-0.9).^2+0.04);f1=sym(a-b-6)int(f1,x,0,1) %计算表达式f1在变量x从0到1的定积分f2=sym(exp(x.^2))f3=sym(1/(4-sin(16*pi*x)))int(f2,x,0,2) %计算表达式f2从0到2的定积分int(f3,x,2,4) %计算表达式f3从2到4的定积分f=f2+f3f0 =sin(x)/xans =sinint(2)f1 =1/((x-3/10)^2+1/100)-1/((x-9/10)^2+1/25)-6ans =10*atan(7)-5*atan(1/2)-6+10*atan(3)-5*atan(9/2)f2 =exp(x^2)f3 =1/(4-sin(16*pi*x))ans =-1/2*i*erf(2*i)*pi^(1/2)ans =2/15*15^(1/2)f =exp(x^2)+1/(4-sin(16*pi*x))第八题x0=1:10;%创建横坐标向量y0=[-2.9414,-1.3807,-1.1918,-0.7284,-0.5484,-0.2656,-0.963,0.9794,0.9800,1.8860]; %创建纵坐标向量p=polyfit(x0,y0,3)%进行三阶多项式拟合x1=1:0.1:10y1=polyval(p,x1)%计算拟合曲线数据plot(x0,y0,'o',x1,y1,'m')%绘制原始数据和拟合曲线hold onx=1:0.25:10;%创建插值点y1=interp1(x0,y0,x,'cubic')%三次插值plot(x0,y0,'*',x,y1,'-g')%绘制图形legend('原始数据','拟合插值','三次插值') %图形标注p =0.0190 -0.3074 1.8106 -4.2733x1 =Columns 1 through 121.0000 1.50002.0000 2.50003.0000 3.50004.0000 4.50005.0000 5.50006.0000 6.5000Columns 13 through 197.0000 7.5000 8.0000 8.5000 9.0000 9.5000 10.0000y1 =Columns 1 through 12-2.7512 -2.1852 -1.7303 -1.3722 -1.0967 -0.8897 -0.7369 -0.6240 -0.5369 -0.4614 -0.3832 -0.2881Columns 13 through 19-0.1619 0.0096 0.2406 0.5454 0.9382 1.4332 2.0445y1 =Columns 1 through 12-2.9414 -2.3974 -1.9224 -1.5666 -1.3807 -1.3164 -1.2777 -1.2433 -1.1918 -1.0938 -0.9590 -0.8247Columns 13 through 24-0.7284 -0.6741 -0.6335 -0.5953 -0.5484 -0.4733 -0.3795 -0.2995 -0.2656 -0.3746 -0.6143 -0.8540Columns 25 through 36-0.9630 -0.6596 0.0081 0.6757 0.9794 0.9796 0.9797 0.9798 0.9800 1.0580 1.2633 1.5534Column 371.8860。
fdatool使用
基于MATLAB的滤波器设计由于MATLAB的广泛使用和功能的不断更新,基于MATLAB的滤波器设计方法以其方便快捷的特点,受到了设计者的欢迎。
下面将举例说明基于MATLAB的FIR滤波器的设计。
1 基于FDATool的FIR滤波器设计使用FDATool设计FIR滤波器的具体步骤如下:1.1 滤波器指标若需要设计一个16阶的FIR滤波器(h(0)=0),给定的参数如下:(1) 低通滤波器(2) 采样频率F S为48kHz,滤波器F C为10.8kHz(3) 输入序列位宽为9位(最高位为符号位)在此利用MATLAB来完成FIR滤波器系数的确定。
1.2 打开MATLAB的FDAToolMATLAB集成了一套功能强大的滤波器设计工具FDATool(Filter Design & Analysis Tool),可以完成多种滤波器的设计、分析和性能评估。
单击MATLAB主窗口下方的“Start”按钮,如图B.1所示,选择菜单“ToolBox”→“Filter Design”→“Filter Design & Analysis Tool(FDATool)”命令,打开FDATool,如图B.2所示。
图B.1 FDATool的启动图B.2 FDATool的主界面另外,在MATLAB主命令窗口内键入“fdatool”,同样可打开FDATool程序界面。
1.3 选择Design FilterFDATool界面左下侧排列了一组工具按钮,其功能分别如下所述:●滤波器转换(TransForm Filter)●设置量化参数(Set Quantization Parameters)●实现模型(Realize Model)●导入滤波器(Import Filter)●多速率滤波器(Multirate Filter)●零极点编辑器(Pole-zero Editor)●设计滤波器(Design Filter)选择其中的按钮,进入设计滤波器界面,进行下列选择,如图B.3所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、概述
Matlab HDL Coder是Mathworks公司推出的一款软件,用于将Matlab和Simulink中的算法和模型转换为硬件描述语言(HDL)代码,支持工程师和科研人员快速将他们的算法和模型部署到FPGA等
硬件上。
本文将介绍Matlab HDL Coder的基本原理和使用范例。
二、Matlab HDL Coder基本原理
1. Matlab HDL Coder工作原理
Matlab HDL Coder通过将Matlab和Simulink中的算法和模型转换为HDL代码,实现了从高级语言到硬件描述语言的转换。
它内置了针对HDL代码优化的算法,并且支持常见的FPGA开发板和EDA工具。
2. Matlab HDL Coder的特点
Matlab HDL Coder具有高度集成的特点,用户可以将Matlab和Simulink环境中的算法和模型直接转换为HDL代码,无需额外的抽
象语言描述。
另外,Matlab HDL Coder还支持嵌套代码生成和自定
义HDL代码生成算法,满足了不同场景下的需求。
三、Matlab HDL Coder范例
1. 简单的加法器设计
假设我们需要实现一个简单的加法器,将两个8位的二进制数相加得
到一个8位的结果。
我们可以通过以下步骤使用Matlab HDL Coder
实现这个功能:
步骤一:使用Matlab函数实现加法器的算法
```matlab
function result = adder(a, b)
result = a + b;
end
```
步骤二:使用Simulink模型可视化加法器的功能
```matlab
create Simulink model
model = 'adder_model';
new_system(model);
add_block('simulink/Commonly Used Blocks/In1', [model '/In1']); add_block('simulink/Commonly Used Blocks/In2', [model '/In2']); add_block('simulink/Commonly Used Blocks/Sum', [model
'/Sum']);
add_block('simulink/Commonly Used Blocks/Out1', [model
'/Out1']);
add_line(model, 'In1/1', 'Sum/1');
add_line(model, 'In2/1', 'Sum/2');
add_line(model, 'Sum/1', 'Out1/1');
```
步骤三:使用Matlab HDL Coder生成HDL代码
```matlab
hdlmodel = 'adder_model_hdl';
makehdl(model, hdlmodel);
```
通过以上步骤,我们可以快速地使用Matlab HDL Coder实现一个简单的加法器,并生成相应的HDL代码。
2. 图像处理算法的硬件部署
假设我们有一个图像处理算法,需要将其部署到FPGA上以加速运算。
我们可以使用Matlab HDL Coder实现这一目标:
步骤一:实现图像处理算法的Matlab函数
```matlab
function result = image_processing(img)
图像处理算法的具体实现
end
```
步骤二:使用Simulink模型可视化图像处理算法的功能
```matlab
create Simulink model
model = 'image_processing_model';
new_system(model);
add_block('simulink/Commonly Used Blocks/In1', [model '/In1']); add_block('simulink/Commonly Used Blocks/Out1', [model
'/Out1']);
添加图像处理算法的模块
...
```
步骤三:使用Matlab HDL Coder生成HDL代码
```matlab
hdlmodel = 'image_processing_model_hdl';
makehdl(model, hdlmodel);
```
通过以上步骤,我们可以将图像处理算法部署到FPGA上,实现图像处理算法的硬件加速。
3. 通信系统的FPGA实现
假设我们需要将一个通信系统的基带处理模块部署到FPGA上,我们可以使用Matlab HDL Coder实现这一需求:
步骤一:实现通信系统基带处理算法的Matlab函数
```matlab
function result = baseband_processing(signal)
通信系统基带处理算法的具体实现
end
```
步骤二:使用Simulink模型可视化通信系统基带处理算法的功能
```matlab
create Simulink model
model = 'baseband_processing_model';
new_system(model);
add_block('simulink/Commonly Used Blocks/In1', [model '/In1']); add_block('simulink/Commonly Used Blocks/Out1', [model
'/Out1']);
添加通信系统基带处理算法的模块
...
```
步骤三:使用Matlab HDL Coder生成HDL代码
```matlab
hdlmodel = 'baseband_processing_model_hdl';
makehdl(model, hdlmodel);
```
通过以上步骤,我们可以将通信系统的基带处理模块部署到FPGA上,实现硬件加速。
四、总结
Matlab HDL Coder是一款非常强大的工具,能够帮助工程师和科研
人员快速地将他们的算法和模型部署到硬件上。
本文介绍了Matlab HDL Coder的基本原理和使用范例,并通过具体的案例展示了其强大的功能。
希望本文能够帮助读者更加深入地了解Matlab HDL Coder,并在实际应用中发挥其作用。