SPOT多光谱影像与全色波段融合
SPOT多光谱影像与全色影像融合研究
SPOT多光谱影像与全色影像融合研究
郑丽
【期刊名称】《佳木斯大学学报(自然科学版)》
【年(卷),期】2015(033)006
【摘要】图像融合是解决多源遥感图像综合的有效技术手段,针对不同数据源选择最佳的融合方法是提高图像融合质量的关键.分析Gram_Schmidt融合算法的理论、算法和融合步骤的基础上,对SPOT的多光谱波段影像和全色波段影像进行融合,目视效果从色调、纹理和清晰度等方面进行定性分析,定量分析是根据均值、标准方差、扭曲程度指标进行分析,对融合后影像质量做出了评价.研究结果表明:SPOT影像采用Gram_Schmidt变换融合效果保持了较高的空间分辨率同时光谱保持较好,Gram_Schmidt融合算法适合高分辨遥感影像融合.
【总页数】4页(P868-871)
【作者】郑丽
【作者单位】宿州学院环境与测绘工程学院,安徽宿州234000
【正文语种】中文
【中图分类】TP79
【相关文献】
1.基于TM多光谱影像和SPOT全色影像的融合技术探讨 [J], 王勇
2.基于支持向量机的SPIN-2影像与SPOT-4多光谱影像融合研究 [J], 赵书河;冯
学智;都金康;林广发
3.遥感影像的融合--SPOT全色波段和多光谱影像的融合 [J], 陆宇红;马林波;韩嘉福
4.小波变换用于高分辨率全色影像与多光谱影像的融合研究 [J], 李军;周月琴;李德仁
5.遥感影像的融合——SPOT全色波段和多光谱影像的融合 [J], 陆宇红;马林波;韩嘉福
因版权原因,仅展示原文概要,查看原文内容请购买。
(C++)GDAL学习笔记——5全色影像与多光谱影像的融合

(C++)GDAL学习笔记——5全⾊影像与多光谱影像的融合任务将全⾊影像与多光谱影像融合。
原理使⽤的⽅法是HSI变换法,即先将多光谱影像选择RGB三个波段进⾏HSI变化得到H(⾊调)、S(饱和度)、I(亮度)三个波段。
之后按照全⾊波段的尺⼨将H和S两个波段进⾏缩放得到新的H和S波段,⽤全⾊波段替代I波段,将新的H和S波段与全⾊波段组合后进⾏HSI逆变换得到新的RGB波段影像。
HSI变换法的实现这⾥不详细介绍,可以参考这篇帖⼦。
代码/*实验5 将全⾊影像与多光谱影像融合时间 20210712这⾥使⽤的多光谱影像为BGR3波段*/#include<iostream>#include"gdal.h"#include"gdal_priv.h"#include"ogr_spatialref.h"#include<cmath>#include<algorithm>#include<Eigen/Dense>#define PI 3.1415using namespace std;using namespace Eigen;// ⽤来对图像进⾏缩放bool ImResize(MatrixXf srcM,MatrixXf &dstM);int main(){GDALAllRegister();char MulPath[]="D:\\Practice\\org\\exp5_mul.tif";char PanPath[]="D:\\Practice\\org\\exp5_pan.tif";char SavePath[]="D:\\Practice\\res\\exp5_res.tif";GDALDataset* mMulSet =(GDALDataset*)GDALOpen(MulPath, GA_ReadOnly);// 多光谱cout <<" E"<< endl;GDALDataset* mPanSet =(GDALDataset*)GDALOpen(PanPath, GA_ReadOnly);// 全⾊// 获取图像参数int mmX = mMulSet->GetRasterXSize();int mmY = mMulSet->GetRasterYSize();int mpX = mPanSet->GetRasterXSize();int mpY = mPanSet->GetRasterYSize();// 拉伸变换的参数float k1 =float(mpX)/ mmX;float k2 =float(mpY)/ mmY;// 取出波段GDALRasterBand* mMBandB = mMulSet->GetRasterBand(1);GDALRasterBand* mMBandG = mMulSet->GetRasterBand(2);GDALRasterBand* mMBandR = mMulSet->GetRasterBand(3);GDALRasterBand* mPBand = mPanSet->GetRasterBand(1);// 申请缓冲区unsigned short* mMBandB_ =new unsigned short[mmX*mmY];unsigned short* mMBandG_ =new unsigned short[mmX*mmY];unsigned short* mMBandR_ =new unsigned short[mmX*mmY];unsigned char* mPBand_ =new unsigned char[mpX*mpY];// 把数据写⼊缓冲区mMBandR->RasterIO(GF_Read,0,0, mmX, mmY, mMBandR_, mmX, mmY, GDT_Int16,0,0); mMBandG->RasterIO(GF_Read,0,0, mmX, mmY, mMBandG_, mmX, mmY, GDT_Int16,0,0); mMBandB->RasterIO(GF_Read,0,0, mmX, mmY, mMBandB_, mmX, mmY, GDT_Int16,0,0);mPBand->RasterIO(GF_Read,0,0, mpX, mpY, mPBand_, mpX, mpY, GDT_Byte,0,0);// 申请缓冲区IHSMatrixXf I1(mmX, mmY);MatrixXf H1(mmX, mmY);MatrixXf S1(mmX, mmY);// RGB 转 IHSfor(int m =0; m < mmY; m++)for(int n =0; n < mmX; n++){float R = mMBandR_[m*mmX + n];float G = mMBandG_[m*mmX + n];float B = mMBandB_[m*mmX + n];float r = R /(R + G + B);float g = G /(R + G + B);float b = B /(R + G + B);float h, s, i;float theta =acos(0.5*(r - g + r - b)/sqrt(pow(r - g,2)+(r - b)*(g - b)));if(b <= g){ h = theta;}else{ h =2* PI - theta;}s =1-3*min(r,min(g, b));i =(R + G + B)/(3*65535);I1(m,n)= i *65535;S1(m,n)= s *100;H1(m,n)= h *180/ PI;}// 将S1 和 H1 拉伸MatrixXf S2(mpX, mpY);MatrixXf H2(mpX, mpY);MatrixXf I2(mpX, mpY);ImResize(H1, H2);ImResize(S1, S2);//for (int ii = 0; ii < 20; ii++) { cout << H1(ii, ii) <<" "<< H2(ii, ii) << endl; }for(int i =0; i < mpY; i++)for(int j =0; j < mpX; j++){I2(i, j)=float(mPBand_[i*mpX + j]);}cout <<"RGB 转 HSI完成"<< endl;/******************HSI 转 RGB**********************/MatrixXf RR(mpX, mpY);MatrixXf GG(mpX, mpY);MatrixXf BB(mpX, mpY);for(int k =0; k < mpX*mpY; k++){float H =H2(k), S =S2(k), I =I2(k);float h = H*PI /180;float s = S /100;float i = I /255;float r, g, b;if(h >=0&& h <2* PI /3){b = i*(1- s);r = i*(1+ s*cos(h)/cos(PI /3- h));g =3* i -(b + r);}else if(h <4* PI /3){r = i*(1- s);g = i*(1+ s*cos(h -2* PI /3)/cos(PI - h));b =3* i -(g + r);}else{g = i*(1- s);b = i*(1+ s*cos(h -4* PI /3)/cos(5* PI /3- h));r =3* i -(g + b);}RR(k)= r *255;GG(k)= g *255;BB(k)= b *255;}// 将计算得到的RGB申请缓冲区并放⼊unsigned short* mRR =new unsigned short[mpX*mpY];unsigned short* mGG =new unsigned short[mpX*mpY];unsigned short* mBB =new unsigned short[mpX*mpY];for(int y =0; y < mpY; y++){for(int x =0; x < mpX; x++){mRR[y*mpX + x]=(unsigned short)RR(y, x);mGG[y*mpX + x]=(unsigned short)GG(y, x);mBB[y*mpX + x]=(unsigned short)BB(y, x);}}cout <<"HSI 转 RGB 完成"<< endl;// 创建输出数据集GDALDriver* hDriver =GetGDALDriverManager()->GetDriverByName("GTiff");GDALDataset* mSaveSet = hDriver->Create(SavePath, mpX, mpY,3, GDT_UInt16,NULL); // 获取影像的地理信息和投影信息double geoInformation[6];mPanSet->GetGeoTransform(geoInformation);const char* gdalProjection = mPanSet->GetProjectionRef();// 将影像的地理信息写到纠正后影像数据集中// 将影像的地理信息写到纠正后影像数据集中mSaveSet->SetGeoTransform(geoInformation);mSaveSet->SetProjection(gdalProjection);// 将波段数据写⼊mSaveSet->GetRasterBand(1)->RasterIO(GF_Write,0,0, mpX, mpY, mRR, mpX, mpY, GDT_UInt16,0,0); mSaveSet->GetRasterBand(2)->RasterIO(GF_Write,0,0, mpX, mpY, mGG, mpX, mpY, GDT_UInt16,0,0); mSaveSet->GetRasterBand(3)->RasterIO(GF_Write,0,0, mpX, mpY, mBB, mpX, mpY, GDT_UInt16,0,0);delete[] mMBandB_, mMBandG_, mMBandR_;delete[] mRR, mGG, mBB;GDALClose(mSaveSet);GDALClose(mMulSet);GDALClose(mPanSet);GDALDestroyDriverManager();cout <<"程序运⾏完毕"<< endl;getchar();return0;}bool ImResize(MatrixXf srcM, MatrixXf & dstM){int msW = srcM.cols();int msH = srcM.rows();int mdW = dstM.cols();int mdH = dstM.rows();// 计算缩放参数float k1 =float(mdW)/ msW;float k2 =float(mdH)/ msH;for(int h =0; h < mdH; h++){for(int w =0; w < mdW; w++){float tmpX = w / k1;float tmpY = h / k2;dstM(h, w)=srcM(int(tmpY),int(tmpX));}}return false;}结果展⽰多光谱影像:全⾊影像:融合影像:ENVI的Brovey融合结果:结语对⽐了⼀下使⽤ENVI得到的融合结果,是差不多的,不过在使⽤MATLAB进⾏的时候,不知为何融合影像的⾊调有些不同,暂时没有深究,留待以后吧。
ASTER多光谱波段与SPOT全色波段融合方法研究
1 2 P A 变 换融 合法 . C
P A变换 ( C 主成 分 变换 亦 称 K—L变 换 ) 统计 是 特征 基础上 的多 维正交 线性 变换 , 消除模式 特征之 在
间的相关性 , 出差异性 方 面有最 优 的效果 。主成分 突 变换 融合 的具体 步骤 为[ : 4 ] ( ) 算参与 融合 的 波段 图像 的相关矩 阵 R; 1计 () 2 由相 关矩 阵 R 计算 特 征值 凡和 特征 向量 ( ,
维普资讯
第 2 卷 第 1期 2
20 08年 2月
{ } I
、
Vo . 2 No 1 12 , . F b ,0 8 e . 20
MI NERAL RES 0URCES AND GEOL OGY
AS E 多 光谱 波 段 与 S OT 全 色 T R P 波 段融 合方 法研 究①
① 收 稿 日期 :0 7 5 2 作 者 简 介 : 怀 2 (9 2 ) 男 , 20 —0 —2 喻 . 1 8 - , 中南 大 学 硕士 研 究 生 , 要 从 事遥 感 与 GI 术 方 法 研 究 。 主 S技 基 金项 目 : 国 地 质调 查 局国 土 资 源大 调 查 项 目 (水 ) 2o ] l -0 — 1 ) 助 。 中 ( [o so 1 1 2资
只 能 为 3 。
影像 融 合是 一 个对 多遥感 器 的 影像 数 据 和其 他 信 息的处理 过 程 。 着重于 把那 些在空 间和 时 间上冗 它 余 或互 补 的多 源 数据 , 一 定 的规 则进行 运 算 处 理 , 按
获得 比任何 单 一 数据 更 精确 、 丰 富 的信 息 , 更 生成 一
SPOT-5全色与多光谱遥感影像融合方法比较
2 F ja oet o ain l& T c nc lC l g , n ig3 3 0 C ia; . uin F rsr V c t a y o eh ia ol e Na pn 5 0 0, hn e
3 S n i nv s y S n ig3 5 0 C i ) . a m n U i r t ,a m n 6 0 0, hn g ei a
te a c r mai a d h p n h o tc n mu t—p c r l ma e o S lis e ta i g s f POT- wih HS r n fr to 5 t I ta somai n,PCA r s l to e ou in,Br v y oe
ta so ai n, u i lc tv n r n fr t m o m h p ia ie a d HPF r s l t n. s ls o ifr n u in m eh ds we e a lz d i e s o eoui o Re u t fd fe e tf so t o r nay e n t r f m s e il e ou in n a c me t a s e ta i fr ai n man e a c . Th r s ls h we p ca r s l to e h n e n nd p cr l n o m to it n n e e e u t s o d:HP F a d HS n I r s l to d t e b s uai e ou i n ha h e tq lt y. K e r s: r moe e sn i a e; ma e f so y wo d e t s n ig m g i g u i n;I S r n fr ain;P H ta so m to CA r s l t n; o e r n fr to eoui o Br v y ta so main; muh p iai e ta s r ai n: P e ou in i lc t r n fm t v o o H F r s l to
ENVI软件进行SPOT卫星影像处理步骤
ENVI软件进行SPOT卫星影像处理步骤一、启动ENVI系统二、打开SPOT卫星影像数据1.点击ENVI主菜单中的File(文件)打开下拉菜单,选择Open Image File(打开图像文件)。
2.激活Enter Data (写入数据文件名)文件选择对话框,进入被处理的SPOT图像数据的路径,选择被处理的图像文件名(后缀格式为:.img),点击OK,予以确认。
3.点击IP Software(IP软件程序系统)中的ER Mapper,进入所选择的文件子目录,选择被处理的头文件(后缀格式为:.hdr)。
4.激活可用波段列表,点击Gray Scale(灰标)单选按钮,使用鼠标左键点击相应的波段名,从对话框顶部所列波段中选择对应的图像波段(通常采用4、3、2的RGB 合成方案)。
所选择的波段名即显示在Selected Band:(选择波段)字段区域中。
5.点击Load Band(加载波段)按钮,加载被选中的SPOT图像到新的显示窗口中。
6.点击ENVI主菜单中的File(文件)打开下拉菜单,选择Open External File(打开外部文件)。
三、修改ENVI头文件中的地图信息,给图像添加地理坐标1.如果所选中的SPOT图像已经带有地理坐标,则这个步骤可以不进行。
2.如果所选中的SPOT图像不带有地理坐标,则在可用波段列表中,用右键点击被选择的图像文件名下的Map Info图标,从弹出的快捷菜单中选择Edit Map Information 打开相应的对话框。
在这个对话框中调整ENVI使用的Magic Pixel(作为地图坐标的起始像元)相对应的影像地理坐标。
所使用的影像地理坐标,从被选中的SPOT图像数据的头文件中查找。
头文件的后缀格式为:.hdr(头文件的名称与图像名称一致)。
其中给出了被处理的SPOT图像的地图投影、像元尺寸以及地图投影参数和图像4个角点像元对应的经纬度坐标或WGS84地心坐标系下的坐标。
多光谱和全色影像融合步骤
多光谱和全色影像融合步骤1.引言多光谱影像和全色影像是遥感领域中常用的两种影像数据,它们分别具有不同的光谱特征和空间分辨率。
为了充分利用两种影像数据的优势,我们可以采用多光谱和全色影像融合技术,将它们融合成一幅具有高空间分辨率和丰富光谱信息的影像。
本文将介绍多光谱和全色影像融合的步骤和方法。
2.多光谱和全色影像融合步骤多光谱和全色影像融合的步骤主要包括预处理、融合方法选择和后处理三个环节。
2.1预处理在进行多光谱和全色影像融合之前,我们需要对原始影像进行预处理,以确保融合结果的准确性和可靠性。
预处理包括影像的配准、辐射校正和大气校正等。
2.1.1影像配准影像配准是将多光谱和全色影像进行精确对齐的过程。
常用的配准方法包括特征点匹配、相位相关和控制点配准等。
2.1.2辐射校正辐射校正用于消除影像中的光照差异,使得不同影像之间具有一致的辐射特性。
常用的辐射校正方法包括直方图匹配法、直线拉伸法和大气校正法等。
2.1.3大气校正大气校正用于消除影像中由于大气介质的存在而引起的大气光照效应。
常用的大气校正方法包括大气点扩散函数法和大气透射率法等。
2.2融合方法选择选择适合的融合方法对于多光谱和全色影像融合的成功至关重要。
常用的融合方法包括基于变换的方法和基于分解的方法。
2.2.1基于变换的方法基于变换的方法通过对多光谱和全色影像进行变换,将它们融合到一个新的空间域或频域中。
常用的变换方法包括傅里叶变换、小波变换和主成分分析法等。
2.2.2基于分解的方法基于分解的方法通过对多光谱和全色影像进行分解,提取它们的特征信息,并进行融合。
常用的分解方法包括主成分分析、小波分解和非负矩阵分解等。
2.3后处理融合完成后,我们还需要进行一些后处理操作,进一步改善融合结果的质量和可视效果。
2.3.1锐化增强锐化增强是指对融合结果进行图像增强处理,以提高影像的细节和边缘信息。
常用的锐化增强方法包括拉普拉斯锐化和直方图均衡化等。
arcgis多光谱和全色影像融合步骤
arcgis多光谱和全色影像融合步骤一、引言多光谱和全色影像融合是一种常用的遥感图像处理技术,在地理信息系统(G IS)领域有着重要的应用。
本文将介绍在Ar cG IS软件中,利用多光谱和全色影像进行融合的步骤和方法。
二、准备工作在进行多光谱和全色影像融合之前,我们需要确保已经准备好以下内容:1.多光谱影像:多光谱影像通常包含多个波段,例如红、绿、蓝和近红外波段。
它提供了丰富的光谱信息,但空间分辨率较低。
2.全色影像:全色影像包含单一波段,即灰度图像。
它具有较高的空间分辨率,但波谱信息较少。
3.Ar cG IS软件:确保已经安装并打开Ar c GI S软件,以便进行后续的处理和分析。
三、多光谱和全色影像融合步骤下面是使用A rc GI S软件进行多光谱和全色影像融合的步骤:1.打开Ar cG IS软件并创建一个新的工作空间,用于存储融合后的影像数据。
2.导入多光谱影像和全色影像到Ar cG IS中,确保两个影像数据对应的坐标系统相同。
3.打开"图像增强"工具,选择"融合"选项,并指定多光谱影像和全色影像为输入数据。
4.根据实际需求,设置融合的参数,包括融合方法、权重、偏差等。
5.执行融合操作,等待处理完成。
6.融合完成后,可以进行一系列的后处理,例如直方图均衡化、空间滤波等,以提高图像质量和可视化效果。
7.最后,保存融合后的影像数据,并进行进一步的分析和应用。
四、总结本文介绍了在Ar cG IS软件中进行多光谱和全色影像融合的步骤和方法。
通过将多光谱影像的波谱信息和全色影像的高空间分辨率结合起来,可以得到同时具有丰富光谱信息和较高空间分辨率的影像数据,为地理信息系统的分析和应用提供更准确和详细的数据支持。
注意:本文内容仅为演示和说明用途,具体操作需根据实际情况和需求进行调整和优化。
希望本文能对你在ar c gi s多光谱和全色影像融合方面的工作有所帮助!。
SPOT多光谱数据模拟真彩色的三种方法
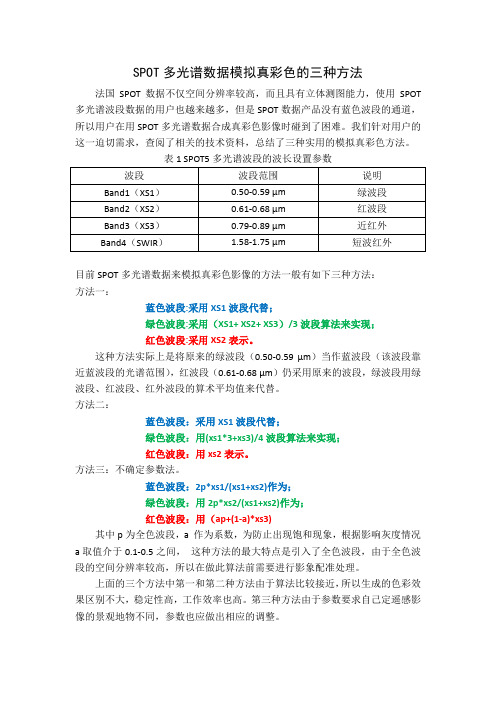
SPOT多光谱数据模拟真彩色的三种方法法国SPOT数据不仅空间分辨率较高,而且具有立体测图能力,使用SPOT 多光谱波段数据的用户也越来越多,但是SPOT数据产品没有蓝色波段的通道,所以用户在用SPOT多光谱数据合成真彩色影像时碰到了困难。
我们针对用户的这一迫切需求,查阅了相关的技术资料,总结了三种实用的模拟真彩色方法。
表1 SPOT5多光谱波段的波长设置参数目前SPOT多光谱数据来模拟真彩色影像的方法一般有如下三种方法:方法一:蓝色波段:采用XS1波段代替;绿色波段:采用(XS1+ XS2+ XS3)/3波段算法来实现;红色波段:采用XS2表示。
这种方法实际上是将原来的绿波段(0.50-0.59 μm)当作蓝波段(该波段靠近蓝波段的光谱范围),红波段(0.61-0.68 μm)仍采用原来的波段,绿波段用绿波段、红波段、红外波段的算术平均值来代替。
方法二:蓝色波段:采用XS1波段代替;绿色波段:用(xs1*3+xs3)/4波段算法来实现;红色波段:用xs2表示。
方法三:不确定参数法。
蓝色波段:2p*xs1/(xs1+xs2)作为;绿色波段:用2p*xs2/(xs1+xs2)作为;红色波段:用(ap+(1-a)*xs3)其中p为全色波段,a 作为系数,为防止出现饱和现象,根据影响灰度情况a取值介于0.1-0.5之间,这种方法的最大特点是引入了全色波段,由于全色波段的空间分辨率较高,所以在做此算法前需要进行影象配准处理。
上面的三个方法中第一和第二种方法由于算法比较接近,所以生成的色彩效果区别不大,稳定性高,工作效率也高。
第三种方法由于参数要求自己定遥感影像的景观地物不同,参数也应做出相应的调整。
全色影像和多光谱影像融合原理
全色影像和多光谱影像融合是指将全色影像(仅包含黑白灰度信息)和多光谱影像(包含多个波段的彩色信息)进行合并,得到具有高空间分辨率和丰富光谱信息的影像。
其原理基于以下步骤:
预处理:对全色影像和多光谱影像进行预处理。
这可能包括去噪、辐射校正、几何校正等。
分辨率匹配:由于全色影像通常具有较高的空间分辨率,而多光谱影像具有较低的空间分辨率,需要将它们的空间分辨率匹配。
可以使用插值等技术对多光谱影像进行上采样,使其与全色影像具有一致的分辨率。
融合算法:融合算法用于将全色影像和多光谱影像合并成一幅高分辨率彩色影像。
常用的融合方法包括:基于变换的方法(如基于小波变换、纹理合成等)、基于统计的方法(如主成分分析、拉普拉斯金字塔变换等)以及基于特征的方法(如IHS变换、HSV变换等)。
增强和调整:对融合后的影像进行增强和调整,以达到更好的视觉效果。
这可能包括对比度调整、色彩平衡、锐化等操作。
通过全色影像和多光谱影像的融合,可以获得既具有高空间分辨率又具有丰富光谱信息的影像,提高了遥感图像的解译能力和应用效果。
常见的应用包括土地利用分类、环境监测、资源调查等。
多光谱与全色图像融合方法解析

多光谱与全色图像融合方法为使多光谱与高空间分辨率全色图像的融合效果在努力保持光谱信息的同时尽可能提高其空间分辨率,论文主要对多光谱与全色图像融合算法进行了深入研究,通过大量的融合实验得到了一系列有价值的结论,完成了一定的创新性工作,具体的工作内容如下:在多分辨率分析的特征匹配基础上,提出了一种基于Mallat小波变换与空间投影结合的图像配准算法。
该算法采用投影匹配原理将二维数据变为一维进行匹配计算,降低了配准所需要的时间。
另外,采用逐层细化的分层搜索策略可减少匹配误差从而提高配准精度。
在综合分析àtrous小波变换和Curvelet变换的优点基础上,提出了一种基于àtrous-Curvelet变换的融合算法。
分解后的系数依据所在高,低频层的不同特点,采取多重加权规则进行融合。
该算法能在保留多光谱图像光谱信息的基础上,有效地提高融合图像的空间分辨率。
针对遥感图像影像分辨率低的问题,提出了一种基于区域模糊推理的NSCT域融合算法。
该算法有效地克服了传统融合方法中存在的融合图像模糊,抗噪能力差的缺点。
针对传统脉冲耦合神经网络(PCNN)模型参数无法自动设定的难题,结合lαβ彩色空间转换,提出了一种基于双通道自适应PCNN的图像融合算法。
该算法充分考虑到像素间的相关性及噪声突变的影响,融合效果优于多尺度分析方法。
同主题文章[1].万宁,吴飞. 基于ICA的全色影像和多光谱影像融合算法' [J]. 计算机工程. 2006.(07)[2].陈蔓丽,陈木生,狄红卫. 基于小波变换的多光谱图像和全色图像配准算法' [J]. 暨南大学学报. 2006.(03)[3].于浩,张晓萍,杨勤科,崔健,李锐. 基于双树复小波的遥感图像融合' [J]. 遥感信息. 2008.(05)[4].张易凡,何明一. 基于局部空间线性恢复模型的多光谱与全色图像融合算法' [J]. 西北工业大学学报. 2008.(01)[5].王霖郁,李坤波,黄丽莲. 基于色调一致性改进的图像融合最速下降法' [J]. 应用科技. 2010.(03)[6].杨明辉,任维春. 法国地理院SPOT图像应用研究的进展' [J]. 遥感信息. 1988.(02)[7].英国将研制高分辨率卫星' [J]. 航天返回与遥感. 2002.(03)[8].李琼,孔令罔,朱元泓. 色彩的宽带多光谱空间表示法(英文)' [J]. 仪器仪表学报. 2004.(S3)[9].王小龙,张杰,初佳兰. 基于光学遥感的海岛潮间带和湿地信息提取——以东沙岛(礁)为例' [J]. 海洋科学进展. 2005.(04)[10].王忠武,赵忠明,刘顺喜. IKONOS图像的线性回归波段拟合融合方法' [J]. 遥感学报. 2010.(01)【关键词相关文档搜索】:通信与信息系统; 图像融合; 多光谱图像; 全色图像; 多分辨率分析; 小波变换; 非下采样Contourlet变换; 脉冲耦合神经网络; 彩色空间转换【作者相关信息搜索】:吉林大学;通信与信息系统;王珂;陈大可;。
三种图像融合方法实际操作与分析

摘要:介绍了遥感影像三种常用的图像融合方式。
进行实验,对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像,简要分析比较三种图像融合方式的各自特点,择出本次实验的最佳融合方式。
关键字:遥感影像;图像融合;主成分变换;乘积变换;比值变换;ERDAS IMAGINE1. 引言由于技术条件的限制和工作原理的不同,任何来自单一传感器的信息都只能反映目标的某一个或几个方面的特征,而不能反应出全部特征。
因此,与单源遥感影像数据相比,多源遥感影像数据既具有重要的互补性,也存在冗余性。
为了能更准确地识别目标,必须把各具特色的多源遥感数据相互结合起来,利用融合技术,针对性地去除无用信息,消除冗余,大幅度减少数据处理量,提高数据处理效率;同时,必须将海量多源数据中的有用信息集中起来,融合在一起,从多源数据中提取比单源数据更丰富、更可靠、更有用的信息,进行各种信息特征的互补,发挥各自的优势,充分发挥遥感技术的作用。
[1]在多源遥感图像融合中,针对同一对象不同的融合方法可以得到不同的融合结果,即可以得到不同的融合图像。
高空间分辨率遥感影像和高光谱遥感影像的融合旨在生成具有高空间分辨率和高光谱分辨率特性的遥感影像,融合方法的选择取决于融合影像的应用,但迄今还没有普适的融合算法能够满足所有的应用目的,这也意味着融合影像质量评价应该与具体应用相联系。
[2]此次融合操作实验是用三种不同的融合方式(主成分变换融合,乘积变换融合,比值变换融合),对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像。
2. 源文件1 、 imagerycolor.tif ,SPOT图像,分辨率10米,有红、绿、两个红外共四个波段。
2 、imagery-5m.tif ,SPOT图像,分辨率5米。
3. 软件选择在常用的四种遥感图像处理软件中,PCI适合用于影像制图,ENVI在针对像元处理的信息提取中功能最强大,ER Mapper对于处理高分辨率影像效果较好,而ERDAS IMAGINE的数据融合效果最好。
SPOT5卫星数据处理
北京揽宇方圆信息技术有限公司SPOT5卫星数据处理1数据分析本案例的SPOT5数据为1个条带的三对影像(3景全色和3景多光谱),数据级别为1A,Geotif格式。
2数据处理2.1处理内容分别对三对影像进行正射纠正、融合、真彩色模拟及镶嵌。
2.2处理流程如图1所示,SPOT5数据处理流程是先利用参考矢量作为参考资料,对全色影像进行正射纠正,利用正射校正后的全色影像作为参考影像,对多光谱影像进行正射纠正。
然后利用校正后的全色和多光谱影像进行融合,并对融合后的影像进行蓝波段合成模拟,形成真彩色影像,最后进行镶嵌和调色处理。
图1SPOT5处理流程2.3全色影像正射纠正为了减少控制点采集,本案例采用有理函数模型对影像进行正射纠正。
原始影像中由于没有RPC文件,故先要通过算法提取RPC文件。
2.3.1RPC提取Focus界面—Tools—Algorithm librarian进入算法库,利用查找工具查找cdSPOTRPC算法。
图1CDSPOTRPC算法在output ports处进行如下设置:设置输出影像名称设置输出的RPC名称,建议和影像同名在Input Params处进行如下设置:添加原始影像名称(tiff文件)设置波段,全色影像为1,多光谱影像则为1,2,3,42.3.2建立工程启动OrthoEngine,点击file/NEW,在Math Modelling Method处选择Optical Satellite Modelling,并选择Rational Function(Compute from GCPs),如图2所示。
同时设置投影信息(图3)。
图2模型选择图3设置投影2.3.3导入数据在Processing step处点击下拉菜单,选择data Input(图4)。
点击第一个图标弹出打开影像面板,并点击New image打开一幅新影像(图5),把三景全色影像都加载到工程中。
图4导入数据图5打开新影像2.3.3采集控制点Processing step下拉菜单选择GCP/TP collection,点击第二个图标,弹出控制点采集面板。
多种融合方法在SPOT—5影像融合中的效果评价
多种融合方法在SPOT—5影像融合中的效果评价作者:王静来源:《科技与创新》2014年第07期摘要:运用多种不同的影像融合技术对SPOT-5影像的多光谱影像和全色影像进行融合,生成新的高分辨率多光谱影像。
通过目视判读,且采用图像均值、相关系数、相对偏差、熵、标准差和平均梯度6个定量指标对不同方式的融合结果进行分析,结果表明,高通滤波融合方法在提高融合影像空间分辨率的同时,也保持了原多光谱影像的光谱特征。
关键词:影像;融合技术;SPOT-5;HPF融合方法中图分类号:TP751 文献标识码:A 文章编号:2095-6835(2014)07-0153-02SPOT-5卫星遥感影像实时性强,覆盖面广,分辨率高,且信息量丰富,已被广泛应用于煤田地质、矿区环境、水工地质、灾害地质等多种地学领域。
融合技术使SPOT-5遥感影像既具有全色数据的高空间分辨率,又具有多光谱数据的光谱分辨率,从色彩、纹理等方面增强了影像的可判读性和区划精度。
一种好的融合方法,不仅要求增强空间分辨率、锐化空间纹理信息,还要求光谱信息保真性高,否则得出的结果偏差很大或错误,不利于遥感解译。
以下采用Brovey变换、乘法变换、主成分(PC)变换、高通滤波(HPF)变换和光谱锐化(Gram-Schmidt变换)方法对工作区内SPOT-5数据的多光谱影像和全色影像进行融合处理,并对各融合效果进行评价。
1 遥感图像的融合算法1.1 Brovey变换法Brovey变换也称彩色标准化融合变换,是通过归一化后的多光谱波段与高分辨率影像的乘积来增强影像信息。
1.2 乘法变换法利用最基本的乘积组合算法直接对两类遥感影像信息进行合成。
1.3 PC变换法多波段图像经主成分变换至各不相关的成分,将高分辨率图像与第一主成分分量图像进行直方图匹配,用匹配后高分辨率图像替换第一主成分,之后使用逆变换得到融合图像。
由于只是用高分辨率图像来替换低分辨率图像的第一主成分,在替换过程中低分辨率图像第一主成分分量中一些光谱特性的信息损失,在很大程度上影响了融合图像的光谱分辨率。
遥感影像的融合_SPOT全色波段和多光谱影像的融合
以选择不同影像的层组合生成新的影像 。 处理之后得到 1 个下列组合方式的影像 : 波段 1 :根据亮度通道影像进行直方图均衡后 的全色波段 。
波段 2 :未发生变化的色度波段 。 波段 3 :未发生变化的饱和度波段 。 3. 2. 4 IHS 到 RGB 的反转变换
在 image interpretor 面板上选择 spectral enhance2 ment 命令进行相应处理 ,spectral enhancement 面板显 示出来 。在这个面板上选择 IHS to RGB …命令进 行处理 。处理完成后可以在 viewer 中打开处理后的 影像并与原始的 SPOT 多光谱影像进行比较 ,观察 发生的变化 。通过这个变换可以避免赝象的发生 。 3. 2. 5 全局对比度增强
直方图均衡化处理可以根据亮度通道影像的 直方图重新调整 SPOT 全色波段影像的直方图 (保 留对比度) ,使之与 IHS 影像的直方图匹配 。
通过这步操作 ,SPOT 全色波段的直方图将与前 面得到的影像直方图相类似 。
进行处理之前可以在 viewer 中分别打开每个波 段的影像并显示它们的直方图 ,这一步可看到每一 个直方图的形状和像素值范围的大致分布规律 (本 步骤不是必须做的) 。
5) 对结果影像进行对比度增强处理 。分述如
下:
3. 2. 1 RGB →IHS 转换
IHS 颜色表述系统与 RGB 颜色表述系统相比
特殊之处在于 : IHS 对应的每个轴可以直接与人眼
视觉相关 : Intersity
光强度
Hue
空间物体的本色
Saturation 颜色强度
在 image interpretor 面板上选择 spectral enhance2
影像融合

实验名称:影像融合一、 实验内容1. 对TM 影像和SPOT 影像进行数据融合2. 利用均值、标准差、特征值等参数对融合效果进行评价二、 实验所用的仪器设备计算机和ENVI 软件 TM 影像和SPOT 影像三、 实验原理1. 影像融合定义:指将多元遥感图像按照一定的算法,在规定的地理坐标系中,生成新的图像的过程。
目的在于提高图像空间分辨率,改善分类,多时相图像融合用于变化监测。
2. HSV 变换原理:首先将多光谱图像经HSV 变换得到H 、S 、V 三个分量。
然后将高分辨率的全色图像代替V 分量,保持H 、S 、V 分量不变。
最后再进行HSV 反变换得到具有高空间分辨率的多光谱图像。
3. Brovey 变换原理:Brovey 融合也称色彩标准化(Color Normalization)融合,是一种RGB 彩色融合变换方法。
它保留每个像素的相关光谱特性,并且将所有的亮度信息变换成高分辨率的全色图像融合。
Brovey 融合的方法公式定义为: [R new G new B new ]=PanI 0[R 0G 0B 0] 其中:Pan 表示调整大小后的全色光谱图像的对应值 I 0,R 0、G 0、B 0分别表示调整大小后的多光谱图像的对应值,R new 、G new 、B new 分别表示融合后的多光谱图像的对应值。
4. 评价指标 (1) 均值与标准方差图像均值是像素的灰度平均值,对人眼反映为平均亮度;标准方差反映了图像灰度相对于灰度均值的离散情况,可用来评价图像反差的大小。
均值和标准方差的公式分别为μ=1n ∑x i n i=1 ; σ2=1n−1∑(x i −μ)2n i=1;上述两个式子中,n 表示图像总的像素的个数,X i 为第i 像素的灰度值。
(2) 特征值同名地物点在不同波段图像中亮度的观测量将构成一个多维的随机向量,称为光谱特征向量,而这个矩阵向量发生的伸缩变换比值为特征值。
(3) 相关系数描述波段影像间的相关程度的统计量,反映了两个波段影像所包含信息的重叠程度。
ETM与SPOT影像融合方法比较和评价——以庐山及其周边区域为例

间 分 辨 率 影 像 进 行 归 一 化 处 理 , 高 空 间分辨 率 的程度 。相对 偏差 越 像 融合 为 例 。 常用 的 融合 方 法 进 得 到 融 合 结 果 。此 种 方 法 的 关 键 小 , 对 光谱保 真度 越 高 。标 准偏 差 反
合, 特征级 融合 , 策级 融合 。随着 值 确定 。本文使 用 相关 系数 r 定 保 持 原 来 全 色 波 段 影 像 空 间 分 辨 决 确
遥 感技 术 的发 展 ,对 T 及 S O M P T
影 像 数 据 融 合 技 术 的 研 究 日益 增 多, 出现 了较 多 的融 合方 法 。如 陈 德超 等 人研 究 的 T 与 S O M P T数据
主要是 目视 解译 与定 量评 价 。近几 S O P T全 色波段 代替 1 分量 。 年 发展 中 . 逐 渐产 生 一 些定 量 评 也 改 进 的 I S 变 换 方 法 使 用 H
价 参 数 , 用 的有 信 息 熵 、 均 梯 C re 提 出 的方 法 [ I 亮 度 ) 用 合 影 像 的 清 晰 度 ,平 均 梯 度 值 越 常 平 ap r 6 ( 1 , 使 度 、 准 差 、 对 偏 差 、 关 系 数 、 I (x + S ) 标 相 相 =2 P X 3/ 行 计 算 。其 中 P 则影像 越清 晰 。 3进 大, 标 准偏差 等 _ 5 1 表 示 SO P T全 色 波 段 像 素 值 , S X3 逼 真度 使 用 相 对 偏 差 和 标 准 E M 图像信 息不 够 丰 富 , 晰 使 用 E M 第 四波段 代替[ T 清 偏 差来 评价 『 5 ] 。 T 5 1 。 度 不 高 , 间 分 辨 率 较 低 , 其 光 空 但 相 对 偏 差 反 映 了融 合 后 影 像 高 频 调制 融 合 法[ 7 1 高 空 间 是将
开封市Spot5全色波段与多光谱影像融合评价
Esi a i n o po 5Pa hr m a i nd a d tm to fS t nc o tcBa n M ulis c r l m a eFuso n K a f ng t-pe t a I g i n i ie
近2 0多年来 ,遥感技 术获得迅猛发展 ,一方 面需
要有效 处理 多源遥感信 息描述 同一地物 时信 息解译 的
是 直接 对原 始影像 进行 色彩 空间或频率域 空间的 匹配
形 成一景新 的影像 ;特征 级融合是对 图像 的特征 进行
问题 ;另一方 面需要 对各 种 不同空 间分 辨率和 波谱分 辨率的遥感影像数据进行 融合 以最 大限度提 高信 息量 , 减 少信 息 冗余 “ 。探讨 将这 些具有各 种特征 的遥 感影
Ab t a t I i a e , weu e i e s n me h d : P A、 B o e n e e r h i g so f p t s r c : nt sp p r h s dp x l u i t o s f o C r v ya d I t r s a c HS o ma ef i no o 5 u S p nho t a d n a c r mai n a dmu t s e ta b n sA t ef s, s dt e h e ta i o a i d c tr o t e a c re ai n cb l - p cr l a d . t h i tu e h t r e r d t n l n ia o s f h me n、 o r lt i r i o c e ce t n v r g a in v l a e h s ni g e h e s e t o g r h n s 、s e t l i ei o f in d e a e r d e t oe au t e u i i a a g t t f o ma e nt r ea p cs f ma eb i t e s p cr d l y i h t i g af t a dh g - r q e c fr t n F n l o i e e e n iao s o v l aet ei g o r h n il e m- n ih f u n yi o mai . i a l c mb n dt s d c t r au t e n o y h i te h ma ec mp e e svyi t n h a
福卫全色图像与SPOT5多光谱图像数据融合

、
福卫全 色 图像 处理
由于原 始福 卫 遥感 图像 亮 度不 均 匀 、对 比度 不 明 显 、 之纹 理不 清 楚 等原 因 , 加 可对 原始 图像分 别 进行 以 上 三种 情 况 的 处 理 ,将 处 理 后 的影 像 单 独 作 为 一 层
( ae )可 对 三种 处 理 结 果 叠加 处 理 ( ae t k . Ly r , L yr a )得 Sc
判读更 容易 。
二、 图像 配准
I 6 S OT 多 光 谱 画 像 经 过 岛然 色 彩 蹙 挠 圈 : P 5 r
2数 据 融 合 .
笔 者采 用 2阶 多项 式几 何配 准 , 采 用 2阶 多项 式 但 配准 遥感 图像 时, 面控 制点 的数 量 要求 最低 6个控 制 地
E D SI A IE软件提供的查找表拉伸模块是 R A GN M
通过 E D S M GN R A A IE的层组合操作 , I 将以上三个 对遥感图像的对 比度进行拉伸。处理结果如图 3 所示。 处理 结果评 价 : 由于福卫 图像 呈现 的是一 种灰 度 图 操作结果作为单独的层组合在一起 , 叠加结果在窗口通
成 的浑 浊现象 。 R A GN E D SI MA IE软 件提 供 了去霾 处理
3 理分析 ( etr n l i) . 纹 T x eA ay s u s
E D SI G N R A MA IE软 件 提 供 的纹 理 分 析 模 块 的操 的功能 ,它针对全色图像和多波段 图像的处理方法有 所不 同 。 于全 色 图像 , 对 该方 法采 用点 扩 展卷积 反 转进 作 原 理是 : 过 在一 定 的窗 口内进行 变 异分 析 , 图像 通 使
—
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SPOT多光谱影像与全色波段融合
SPOT多光谱影像的分辨率为20m分辨率,全色为10m分辨率
1、在实习数据路径下打开s_0417_2.bil(多光谱数据)和s_0417_1.bil(全色波段数据),加载到显示窗口中,查看其范围和大小(前者为1418x1114,后者为2835x2227),确定采样系数。
2、在主菜单中选择Basic Tools-Resize Data(Spatial/Spectral),选择多光谱文件(s_0417_2.bil)单击OK。
3、在Resize Data Parameters对话框中的xfac和yfac文本框中分别键入1.999,以使重采样后的图像大小与全色波段一致。
键入输出文件名,单击OK。
4、与前述一样,将重采样图像加载到显示窗口中,在主菜单中选择
Transform-Image Sharpening-HSV,选择重采样图像的显示索引号,单击OK,再选择全色波段作为高分辨输入图像:
5、单击OK,键入输出文件名,单击OK,执行融合,查看结果,并比较其与多波段合成影像与全波段灰度影像的区别。
下图为融合图像:。