海洋平台系泊数值分析基本理论及计算方法
“海洋石油112”号FPSO单点系泊模型试验与数值计算对比分析

“海洋石油112”号FPSO单点系泊模型试验与数值计算对比分析詹燕民;张天宇;张大刚【摘要】Many domestic soft yoke mooring FPSOs in large scale serve in shallow water, which more or less have a certain fault, resulting in much more attention of the hydrodynamic performance and the safety of FPSO in shallow water. HYSY112 soft yoke single point mooring(SPM) system is located in the shallow water field in the Bohai Sea. The HYSY112 SPM system is numerically simulated to validate the accuracy of the three-dimensional dynamic response numerical simulation that is applied in shallow water by comparison with the basin model test results.%国内有多艘大型软刚臂系泊FPSO在浅水服役,或多或少均存在一定故障,因此浅水FPSO 水动力性能和安全问题受到广泛重视。
“海洋石油112”号FPSO软刚臂单点系泊系统位于渤海浅水水域。
文中对该单点系泊系统进行了系泊分析数值模拟,并与水池试验结果进行对比,验证三维动力响应数值模拟在浅水中应用的准确性。
【期刊名称】《船舶》【年(卷),期】2016(027)005【总页数】6页(P88-93)【关键词】浮式生产储卸油装置;单点系泊系统;软刚臂;模型试验【作者】詹燕民;张天宇;张大刚【作者单位】中海石油中国有限公司天津分公司天津300452;北京迪玛尔海洋技术有限公司北京100029;北京迪玛尔海洋技术有限公司北京100029【正文语种】中文【中图分类】P751“海洋石油112”号FPSO(HYSY112)是一艘15万吨级原油收集处理装置,使用由APL公司设计的水下软刚臂单点系泊(简称“112单点”)。
海洋系泊系统设计方法研究
海洋系泊系统设计方法研究薛胥青【摘要】系泊系统在海洋各个领域应用上有着重要的作用.根据实际问题的分析,将系泊系统进行简化,考虑风速、水流和水深变化,分析锚链、重物球、钢桶、钢管和浮标受力关系,采用静力学平衡的研究方法,进而提出了一种系泊系统的静力学优化模型.采用含有约束条件的目标最优化方法进行求解,结果表明:浮标受到水流和风载荷较大时需增加重物球,且游动半径较大,反之亦然;锚链的类型主要以I型和Ⅱ型为主.【期刊名称】《陇东学院学报》【年(卷),期】2018(029)001【总页数】5页(P82-86)【关键词】系泊系统;静力学平衡方程;浮标;锚链【作者】薛胥青【作者单位】陇东学院能源工程学院,甘肃庆阳 745000【正文语种】中文【中图分类】TE293浮标是标示航道、浅滩、碍航物或表示专门用途的水面助航标志,其可靠性主要依赖于浮标在锚定海域的运动情况以及锚系的受力情况,在海风、海浪等的作用下,浮体和系泊线会产生不规则的运动,增加了受力分析的难度,而系泊系统设计技术就是通过分析某一海域海面风速的变化,确定浮标系统受力情况的一种方法。
面对不同海洋环境下的系泊系统,对其系泊系统的结构物有着不同的要求,所以设计出既安全又可靠的系泊系统,是海洋各个领域目前急需解决的一个重大课题[1]。
近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
海洋平台系泊数值分析基本理论及计算方法
海洋平台系泊数值分析基本理论及计算方法本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!海洋平台系泊数值分析基本理论及计算方法通常认为,船舶码头系泊的主要因素可以看作以下几个部分:码头、护舷、系泊缆、系泊结构物(船舶或者平台)、环境载荷。
以上几个因素相互影响,相互作用,最终决定系泊的结果。
当前系泊状态主要受到风、浪、流三种载荷,按照静力计算方式或者采用经验公式可以对风、流载荷进行估算和确定,但是波浪力比较特殊,是其中唯一的动载荷,码头系泊的动态船舶运动特性可以看作波浪与结构物的相互作用。
波浪力在早期的研究中往往简化为平均波浪力或者等效波浪力,在考虑风载荷和流载荷的叠加后,大多采用静态、准静态方法进行实际的缆绳受力、护舷受力计算,并没有考虑到波浪的动态属性。
系泊缆绳的张力计算需要遵循一定的计算准则,在上个世纪80年代左右,chemjawski、Michaell就已经提出了一种解析方法来求解计算船舶系泊缆张力。
求解的方法有以下几个重要步骤:1)通过计算确定设定的方向船舶承受的风、流和等效静波浪力;2)计算求得由船舶横摇、纵摇、垂荡运动引发的垂直方向静回复力;3)用系泊揽本身属性如长度、横截面积、方向角度、弹性模量(非线性)等属性作为基础计算求出系泊缆绳的刚度矩阵;4)最后一步,求出整个系泊系统的总的刚度矩阵,采取提高载荷大小的方式进行迭代计算从而求得每个缆绳的张力值。
2 三维势流理论在早期的码头系泊计算时往往采用静力或者准静力的计算方法,后来理论发展,计算方式大多采用频域或者时域分析方法。
静力或准静力分析方法仅适用与水域状况较好、系泊船舶等运动不大的情况,由此得出系泊缆绳、护舷受力和系泊物体的运动。
时域方法结合三维势流理论、脉冲响应原理、缆绳护舷的非线性很好的解决了各种情况下系泊物体的码头系泊问题。
为了适应实际工程问题,三维势流理论针对流体的性质进行了相应的简化,假设流体为无粘性、无旋、均匀的且不可压缩的理想流体。
系泊系统重物球密度
系泊系统重物球密度引言系泊系统是指用于固定船只或其他浮动结构物的系统,包括锚链、锚和系泊绳等组成。
在船只停靠或作业过程中,系泊系统的设计和运行对于保证船只的稳定性和安全性至关重要。
而重物球密度则是系泊系统设计中一个关键参数,本文将对系泊系统重物球密度进行详细讨论。
1. 系泊系统概述1.1 系泊系统的定义系泊系统是一种通过固定锚链、锚和系泊绳等来固定船只或其他浮动结构物的装置。
它可以使船只保持在特定位置,并抵抗外部环境力的作用。
1.2 系泊系统的组成典型的系泊系统由以下几个主要部分组成:•锚:用于固定在水下底部,提供承载力。
•锚链:连接锚和系泊绳之间,传递受力。
•系泊绳:连接船只与锚链之间,起到缓冲和固定作用。
1.3 系泊系统的作用系泊系统可以实现以下几个功能:•保持船只在指定位置,避免漂移或碰撞。
•抵抗风、浪、潮流等外部环境力的作用。
•为船只提供稳定的停靠条件,方便装卸货物和乘客。
2. 系泊系统重物球密度的意义系泊系统重物球密度是指系泊系统中重物球的密度。
重物球是系泊系统中的一个关键组成部分,其密度的选择对于整个系泊系统的性能和稳定性具有重要影响。
2.1 重物球的作用重物球在系泊系统中起到以下几个关键作用:•提供附加质量:通过增加附加质量,可以增加系泊系统对于外部环境力的抵抗能力。
•改变水下重心:通过调整重物球的位置和密度,可以改变水下结构体系的平衡性和稳定性。
•减小摆动幅度:合理选择重物球密度可以减小船只在风浪作用下的摆动幅度,提高停靠条件。
2.2 重物球密度选择原则选择合适的重物球密度需要考虑以下几个原则:•系泊系统设计要求:根据具体的系泊系统设计要求,选择适合的重物球密度。
例如,对于需要抵御较大风浪的区域,可以选择较高密度的重物球。
•水下结构体系平衡性:通过调整重物球密度,使得水下结构体系能够保持平衡,避免倾斜或翻转等情况发生。
•摆动幅度控制:选择合适的重物球密度可以减小船只在风浪作用下的摆动幅度,提高停靠条件。
应用文-海洋平台系泊数值分析基本理论及计算方法
海洋平台系泊数值分析基本理论及计算方法'海洋平台系泊数值分析基本理论及计算方法通常认为,船舶码头系泊的主要因素可以看作以下几个部分:码头、护舷、系泊缆、系泊结构物(船舶或者平台)、载荷。
以上几个因素相互影响,相互作用,最终决定系泊的结果。
当前系泊状态主要受到风、浪、流三种载荷,按照静力计算方式或者采用公式可以对风、流载荷进行估算和确定,但是波浪力比较特殊,是其中唯一的动载荷,码头系泊的动态船舶运动特性可以看作波浪与结构物的相互作用。
波浪力在早期的研究中往往简化为平均波浪力或者等效波浪力,在考虑风载荷和流载荷的叠加后,大多采用静态、准静态方法进行实际的缆绳受力、护舷受力计算,并没有考虑到波浪的动态属性。
系泊缆绳的张力计算需要遵循一定的计算准则,在上个世纪80年代左右,chemjawski、Michaell就已经提出了一种解析方法来求解计算船舶系泊缆张力。
求解的方法有以下几个重要步骤:1)通过计算确定设定的方向船舶承受的风、流和等效静波浪力;2)计算求得由船舶横摇、纵摇、垂荡运动引发的垂直方向静回复力;3)用系泊揽本身属性如长度、横截面积、方向角度、弹性模量(非线性)等属性作为基础计算求出系泊缆绳的刚度矩阵;4)最后一步,求出整个系泊系统的总的刚度矩阵,采取提高载荷大小的方式进行迭代计算从而求得每个缆绳的张力值。
2 三维势流理论在早期的码头系泊计算时往往采用静力或者准静力的计算方法,后来理论,计算方式大多采用频域或者时域分析方法。
静力或准静力分析方法仅适用与水域状况较好、系泊船舶等运动不大的情况,由此得出系泊缆绳、护舷受力和系泊物体的运动。
时域方法结合三维势流理论、脉冲响应原理、缆绳护舷的非线性很好的解决了各种情况下系泊物体的码头系泊问题。
为了适应实际工程问题,三维势流理论针对流体的性质进行了相应的简化,假设流体为无粘性、无旋、均匀的且不可压缩的理想流体。
之所以这样简化是因为:l)波浪的波幅和系泊浮体相比量级很小,绕射作用明显大于粘性影响,所以忽略粘性;2)对于理想流体而言,初始运动无旋,之后任意时刻运动均无旋,无旋假定合理;3)流体本身的密度几乎不发生变化,水密度假设为均匀和不可压缩也是合理的。
基于AQWA的系泊结构物动态响应数值分析
基于AQWA的系泊结构物动态响应数值分析系泊系统作为船舶与海洋工程中一个重要组成部分,对系泊结构物起着定位的作用,关系着整个系统的安全。
无论是对深海资源进行开发中常见浮式储油装置(FPSO)或者是CALM系泊系统亦或是船舶在码头为了防台的系泊,对系泊系统动力响应分析都是至关重要的。
本文首先对常见的系泊类型以及方式进行了介绍,接着对系泊系统分析的基本理论进行了介绍和简单算例的验证。
然后以三维势流理论为依据,在商业有限元软件ANSYS对典型船舶进行了网格的划分,并运用水动力学软件AQWA中的AQWA-LINE模块对典型的船舶进行了水动力性能的计算,包括附加质量、阻尼系数、幅值响应算子(RAOs)、波浪力等,为后续针对不同系泊状况的动态响应计算提供参数。
最后运用AQWA-DRIFT模块对两种典型的系泊系统进行了动态响应分
析:(1)CALM系泊系统,建立CALM系泊系统模型,计算不同环境载荷下系泊线的张力值以及船体六自由度运动响应,并根据两种不同系泊方式在不同环境载荷下系泊线的张力值的变化比较其优劣。
(2)码头系泊系统,建立码头系泊系统模型,计算典型码头防台系泊状态下系泊线的张力值、浮箱之间的碰撞力以及船体的六自由度运动响应,根据大量的工况计算,得到船体在不同风向、浪向和流向的条件下系泊线张力值的变化,探究在复杂环境载荷耦合下的极限工况。
某小型LNG船系泊布置数值计算分析

某小型LNG船系泊布置数值计算分析伍丹;叶涛【摘要】为实现船舶停泊码头期间的有效系泊,确保码头的安全和LNG卸货作业的顺利进行,以某小型液化天然气船靠泊新加坡LNG码头和大连LNG码头为例,运用OPTIMOOR分析软件,计算在不同环境条件、不同系泊布置时系泊缆绳所受的最大负荷及船舶的最大偏移量,校核该船系泊设备布置的有效性,分析认为,在不同环境的码头上,需要通过调整系泊布置才能提供安全有效的系泊.【期刊名称】《船海工程》【年(卷),期】2019(048)002【总页数】4页(P152-154,158)【关键词】小型LNG船;系泊布置;系缆力;偏移量;数值计算【作者】伍丹;叶涛【作者单位】上海外高桥造船有限公司,上海200137;上海外高桥造船有限公司,上海200137【正文语种】中文【中图分类】U674.13+3由于液化天然气(LNG)的特殊性、LNG码头选址特点和船舶大型化趋势,使其对码头布局和水深的要求越来越高,LNG码头较多采取开敞式布置形式[1]。
LNG船是危险品运输船,对系泊布置要求较高[2-3]部分船东需要船舶设计方提供系泊布置的可行性分析,目前国际上研究的主要方法是物理模型试验和数值计算[4]。
数值计算的原理是对系泊系统建立合理的数学模型,数学模型包含动力和静力模型两种,用数值模拟的方法对系泊体系的内力进行分析预报,从而选择最合理的设计方案。
本文针对某小型LNG船选用其中的静力模型进行系泊布置可行性分析。
计算时,将外载荷按照静力考虑,风和水流载荷采用石油公司国际海事论坛(OCIMF)所推荐的环境条件标准或码头推荐的运营标准;对于波浪载荷,采用的方法是,通过给定的波高计算出波浪作用在船上的近似静力,然后把波浪力叠加到风载荷中[5]。
1 系泊分析概述1.1 系泊布置主要原则一般来说,包括LNG船在内的液货船的系泊模式布置主要参照OCIMF的相关要求,包括如下原则性建议。
1)系泊缆绳尽可能对称布置于船舯附近。
基于数值分析的半潜式海洋平台结构强度计算
基于数值分析的半潜式海洋平台结构强度计算
陈悦
【期刊名称】《机电信息》
【年(卷),期】2024()2
【摘要】半潜式海洋平台因其甲板面积大、移动能力好、稳定性高和作业范围广等优点被广泛应用于军民领域。
但随着半潜式平台的大型化和作业水域的深海化发展,其所处环境越发严峻,平台长期处在波浪等恶劣环境载荷的作用之下,结构很容易因强度不足发生破坏。
现以某半潜式平台为例,基于数值计算方法,结合DNV规范,采用SESAM软件计算出平台的波浪载荷。
利用有限元软件Pat ran/Nast ran对该平台在不同工况下的结构强度进行计算评估,所得结论可为半潜式平台结构设计提供一定的参考。
【总页数】4页(P44-47)
【作者】陈悦
【作者单位】南通理工学院电气与能源工程学院
【正文语种】中文
【中图分类】TE95
【相关文献】
1.基于直接计算的半潜式平台结构总强度评估
2.半潜式平台结构强度分析中的波浪载荷计算
3.半潜式平台总体强度计算和关键结构极限强度计算方法研究
4.半潜式生活平台结构强度计算分析
5.半潜式海洋平台结构的疲劳失效概率计算研究
因版权原因,仅展示原文概要,查看原文内容请购买。
FDPSO单点系泊定位水动力性能的数值计算和模型试验研究
FDPSO单点系泊定位水动力性能的数值计算和模型试验研究魏跃峰;杨建民;陈刚;胡志强【摘要】南海海域海洋环境条件十分恶劣,FDPSO采用何种定位方式保证其正常作业是一个值得探讨的课题。
文章采用数值计算和模型试验的方法,对单点系泊FDPSO水动力性能开展研究。
数值计算包括频域水动力性能计算和时域船体/锚链耦合数值分析。
频域水动力性能计算得到FDPSO船体水动力系数、波浪力和运动幅值响应算子。
时域耦合数值分析计算了单点系泊FDPSO在南海海域一年一遇海况和百年一遇海况下的运动特性。
模型试验在上海交通大学海洋工程深水池中进行,包括静水衰减试验、白噪声试验和不规则波试验。
数值计算结果和模型试验结果比较,验证了数值计算方法的可靠性,并研究了单点系泊FDPSO在南海海域作业海况和极限海况的水动力特性。
%Because the environment condition of the South China Sea is very severe, the position system of FDPSO is a topic worthy of study. In this paper, numerical method and model test are adopted to investi-gate the hydrodynamic performance of FDPSO with single point mooring system. Frequency domain method and time domain coupled analysis are involved in the numerical calculation. The hydrodynamic coefficients, wave exciting force and response amplitude operator are obtained from the frequency domain analysis. The motion character of FDPSO in one-year and a hundred year return period sea states of the South China Sea are acquired by time domain coupled method. The model tests are carried out in the Deepwater Offshore Basinin Shanghai Jiao Tong University, which are composed of free decay tests, white noise tests and irreg-ular wave tests. The numerical results arecompared with the test results to verify the numerical model. The hydrodynamic performance of FDPSO with single point mooring system in operating condition and extreme condition of the South China Sea are studied.【期刊名称】《船舶力学》【年(卷),期】2014(000)004【总页数】11页(P395-405)【关键词】FDPSO;单点系泊;水动力性能;数值计算;模型试验【作者】魏跃峰;杨建民;陈刚;胡志强【作者单位】上海交通大学海洋工程国家重点实验室,上海 200240;上海交通大学海洋工程国家重点实验室,上海 200240;上海交通大学海洋工程国家重点实验室,上海 200240;上海交通大学海洋工程国家重点实验室,上海 200240【正文语种】中文【中图分类】P751海上油气开发不断向深海拓展,涌现出很多新的平台形式。
多点系泊FDPSO运动及系泊载荷模型试验与计算分析

多点系泊FDPSO运动及系泊载荷模型试验与计算分析
浮式钻井生产储油轮(FDPSO-Floating Drilling Production Storage Offloading)是具备钻井、生产、存储、外输等多功能的海洋平台,具有开发成本低、生产周期短、作业调配灵活等优点,受到了海洋工程界的广泛关注。
由于存在钻井系统,FDPSO对系泊定位能力要求较高,过大的运动和载荷响应会对钻井系统对和生产系统的正常作业产生不利的影响,因此需要对FDPSO及系泊系统的运动和载荷响应进行合理的预报。
本文综合应用模型试验与数值计算方法,对FDPSO及多点系泊系统的水动力性能进行分析,研究FDPSO在实际海洋环境条件下的运动与载荷响应情况。
主要内容包括:1)根据浮体水动力性能数值分析理论,对FDPSO的水动力性能进行了初步计算。
分析FDPSO的运动响应特点,为模型试验的设计方案提供参考。
2)通过FDPSO 及系泊系统模型试验方法,对目标多点系泊FDPSO的水动力性能进行分析研究。
根据试验水池条件,研究了系泊系统的等效截断设计方法;研究了实际海洋环境条件下风、浪、流载荷的模拟方法;通过自由衰减试验、系泊系统特性试验、风流载荷试验、规则波与白噪声试验和风浪流联合作用试验,得到了 FDPSO水动力参数,分析了水动力性能特点,并提出了模型试验方法存在的问题。
3)基于模型试验结果,对FDPSO及系泊系统进行时域计算,分析了模型试验方法和数值计算方法的优缺点。
基于混合模型试验方法,综合应用FDPSO模型试验与数值计算,通过数值重构和数值外推获得FDPSO及其多点系泊系统在实际海洋环境条件下的运动与载荷响应情况并进行统计分析,为目标FDPSO的设计提供参考。
基于AQWA的南海半潜式海洋平台系泊系统破断分析
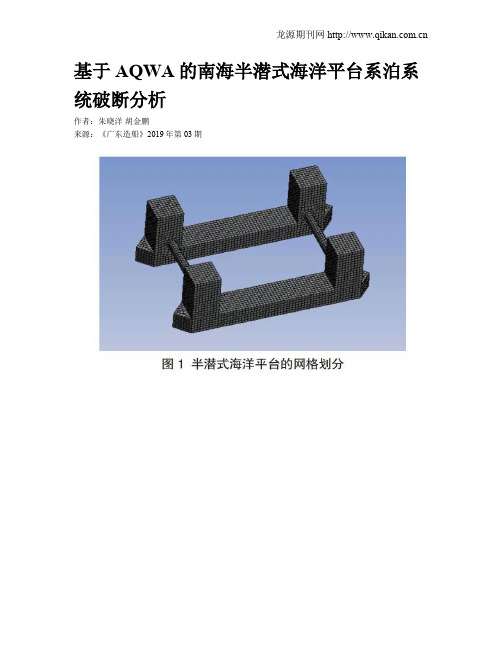
基于AQWA的南海半潜式海洋平台系泊系统破断分析作者:朱晓洋胡金鹏来源:《广东造船》2019年第03期摘 ; ;要:本文基于三維势流理论,针对南海海域工作的某半潜式海洋平台,运用水动力分析软件AQWA进行频域分析和时域分析,得到不同环境下海洋平台的附加质量、兴波阻尼系数等水动力系数以及各自由度的幅值响应传递函数。
在此基础上,考虑风浪流对海洋平台的联合作用,以及系泊系统与海洋平台之间的耦合作用,在时域内研究了海洋平台在南海百年一遇极端海况下的运动响应及系泊缆绳的张力,分析系泊破断时平台运动响应和缆绳张力的变化情况,分析结果可为南海海域半潜式海洋平台的初步设计提供相应的科学依据。
关键词:半潜式海洋平台;AQWA;耦合作用;极端海况;系泊破断中图分类号:P731.22 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标识码:AAbstract: Based on the three-dimensional potential flow theory, this paper uses the hydrodynamic analysis software AQWA to perform frequency domain analysis and time domain analysis on a semi-submersible offshore platform working in the South China Sea. The additional mass and wave damping coefficient of the ocean platform in different environments are obtained. The hydrodynamic coefficients and the amplitude response transfer functions (RAOs) of the respective degrees. On this basis, considering the combined effect of wind and wave on the offshore platform, considering the coupling between the mooring system and the offshore platform, the motion response and mooring of the offshore platform in a once-in-a-century extreme sea condition of the south China sea are studied in the time domain. The changes of platform motion response and mooring line tension during mooring line breakage are considered and analyzed, which will provide a corresponding scientific basis for the preliminary design of the semi-submersible offshore platform in the South China Sea.Key words: Semi-submersible offshore platform; AQWA; Coupling; Extreme sea conditions; Mooring Line’s breaking1 ; ;引言随着海洋油气开采逐步向深水领域迈进,深水半潜式钻井平台在我国海域的应用越来越广泛。
海洋结构物系泊分析基本理论

浮体与系泊系统耦合运动分析方法
不考虑系泊系统运动影响的浮体运动分析方法
将系泊系统视为可为运动浮体的提供水平回复力的非线性弹簧。 计算采取分离计算法,计算步骤: * 计算单根锚索系泊刚度x-TH; * 依据系泊布臵图计算系泊系统在三个方向上的组合 刚度 * 将组合刚度带入浮体运动方程式中进行反复计算, 直至最后运动方程式达到平衡。
1.1.2非弹性单锚泊线(悬链线)方程解
引入一物理量: T ' T gAz 目的将方程简化
dT gAdz w sin ds
(2.1) dT ' w sin ds
(2.2) T 'd w cosds
T gAz d wcosds
s
x
T0 ' tg w
T0 ' 1 log tg w cos
z z0
T0 'cos 0 w
1 1 cos cos 0
z z0
T0 ' 1 1 w cos
选择 0
为缆索与海底之间的接触点,此时锚泊线与海底相切:
系泊系统的作用
第一章系泊系统概述
浮体在波浪力作用下具有六个自由度摇荡运动: 分别为:1-x轴向/纵荡、2-y轴向/横荡、3-z轴向/垂荡、 4-绕x轴/横摇、5-绕y轴/纵摇、6-绕z轴/首摇), 海上进行工程作业时,往往要求浮式结构在海上保持一个较固定的 位臵。但船舶及浮式平台对于水平面内的运动(纵荡、横荡、首摇) 不具有回复力,为此必须采用系泊系统。
系泊系统的主要作用:减小浮体的水平运动。 系泊系统的设计的关键点
减小浮体水平运动的同时,保证系泊系统本身的强度,不宜 产生过大的约束力。最小运动与最小系泊力是一矛盾的要求。
基于实测的浮式海洋平台系泊系统分析与评价

基于实测的浮式海洋平台系泊系统分析与评价一、概述随着海洋资源的日益开发和利用,浮式海洋平台在海洋工程领域的应用越来越广泛。
作为浮式海洋平台的重要组成部分,系泊系统的性能直接关系到平台的安全性和稳定性。
对浮式海洋平台系泊系统进行深入的分析与评价,对于保障平台的安全运行和提高海洋资源的开发利用效率具有重要意义。
本文旨在通过对实测的浮式海洋平台系泊系统数据进行深入研究,分析系泊系统的性能特点和影响因素,评估其在实际应用中的表现。
文章首先介绍了浮式海洋平台和系泊系统的基本概念和分类,然后详细阐述了系泊系统的主要功能和技术要求。
在此基础上,文章重点分析了实测数据的来源和处理方法,以及如何利用这些数据对系泊系统进行性能评价。
通过本文的研究,不仅可以深入了解浮式海洋平台系泊系统的实际工作状态,还可以为平台的优化设计和运行维护提供重要依据。
同时,本文的研究方法和成果也可以为类似海洋工程结构的系泊系统分析和评价提供参考和借鉴。
1. 浮式海洋平台系泊系统的研究背景和意义随着全球能源需求的日益增长,海洋能源的开发与利用逐渐成为研究热点。
浮式海洋平台作为一种重要的海洋资源开发设施,在深海石油天然气开采、海洋风能发电、海洋科研观测等领域具有广泛的应用前景。
浮式海洋平台在复杂的海洋环境下需要承受风、浪、流等多种载荷的联合作用,其稳定性与安全性问题尤为突出。
对浮式海洋平台的系泊系统进行深入研究,具有重要的理论价值和现实意义。
系泊系统是浮式海洋平台的重要组成部分,负责将平台固定在海上的指定位置,以抵抗外界环境力的作用。
系泊系统的性能直接影响到浮式平台的稳定性和安全性。
在极端海况下,系泊系统需要承受巨大的张力和冲击力,若设计不当或维护不善,可能导致系泊失效,进而引发平台漂移、碰撞甚至倾覆等严重后果。
对浮式海洋平台系泊系统的分析与评价至关重要。
本文旨在通过实测数据对浮式海洋平台的系泊系统进行深入研究,分析其在不同海洋环境下的受力特性、动力响应及稳定性等问题,评估系泊系统的性能和安全可靠性。
系泊系统动力分析

系泊系统动力分析一、本文概述系泊系统,作为海洋工程中的重要组成部分,承担着固定海上设施、保障其安全运行的关键任务。
随着海洋资源的日益开发,系泊系统的设计和运行面临着越来越复杂的挑战。
本文旨在通过深入的动力分析,探讨系泊系统在各种环境因素作用下的动态行为,从而为系泊系统的优化设计和安全运行提供理论支持和实践指导。
本文首先对系泊系统的基本构成和工作原理进行介绍,阐述系泊系统动力分析的重要性和必要性。
随后,本文将详细介绍系泊系统动力分析的基本理论和方法,包括动力学建模、数值计算、模型验证等方面的内容。
在此基础上,本文将通过对实际案例的分析,探讨系泊系统在风浪、海流等环境因素作用下的动态响应特性,分析影响系泊系统安全性的关键因素。
本文还将对系泊系统的优化设计和运行管理进行探讨,提出改进建议和优化措施。
通过本文的研究,不仅可以加深对系泊系统动力特性的理解,还可以为系泊系统的设计和运行提供科学的依据和有效的指导,推动海洋工程领域的技术进步和发展。
二、系泊系统基础知识系泊系统,也被称为锚泊系统,是一种海洋工程技术,主要应用在船舶、浮式平台和其他海洋结构物的定位和固定上。
其主要目的是在各种环境条件下,如风浪、潮流、地震等,保证结构物的安全位置,防止其发生漂移或碰撞。
系泊系统的设计和优化是确保海上作业顺利进行的关键因素。
系泊系统主要由锚链、锚链筒、锚链轮、锚链管、止链器、锚链张力计、锚链舱、锚、锚链导览孔等组成。
其中,锚是系泊系统的主要部分,通常由钢铁制成,形状和重量因应用环境和需求而异。
锚链则是连接锚和船舶或海洋结构物的关键部件,需要承受巨大的拉力和摩擦力。
系泊系统的设计和选择需要考虑多种因素,包括海洋环境、结构物的重量和尺寸、预期的工作条件等。
系泊系统的动态特性,如其在风浪中的响应,也是设计过程中需要重点考虑的问题。
通过合理的设计和优化,可以使得系泊系统在保证结构物安全定位的同时,最大限度地减少对周围环境和生态系统的影响。
[交通运输]海洋平台强度
![[交通运输]海洋平台强度](https://img.taocdn.com/s3/m/e6d39b300622192e453610661ed9ad51f01d548a.png)
海洋平台强度Harbin Engineering UniversityHarbin Engineering University海底石油的开采过程包括钻生产井、采油气、集中、处理、贮存及输送等环节。
海上石油生产与陆地上石油生产所不同的是要求海上油气生产设备体积小、重量轻、高效可靠、自动化程度高、布置集中紧凑。
一个全海式的生产处理系统包括:油气计量、油气分离稳定、原油和天然气净化处理、轻质油回收、污水处理、注水和注气系统、机械采油、天然气压缩、火炬系统、贮油及外输系统等。
海类洋平台分类供海上钻生产井和开采油气的平台主要有:固定式采油气平台:其形·有桩式平台(如导管架平台)、牵索塔式平台、重力式平台(钢筋混凝土重力式平台、钢筋混凝土结构混合的重力式平台)。
浮式采油气平台:其形式又分:a.可迁移式平台(又称活动式平台),如坐底式平台(也称沉浮式平台)、自升式平台、半潜式平台和船式平台(即钻井船)。
b.不迁移的浮式平台,如张力腿平台、铰接式平台。
绪论一、海洋平台的主要类型平台移动式固定式坐底式自升式半潜式浮船式导管架式重力式张力腿式牵索塔式返回三角形坐底式平台单立柱坐底式平台返回返回返回上图所示为半潜式平台的几种形式。
返回返回返回二、几种典型平台的结构组成 自升式平台:平台主体;桩腿(圆柱|桁架);升降机构半潜式平台:上层平台;下浮体(或浮箱);立柱和撑杆导管架平台:上部结构;导管架;桩三、海洋平台作业的特点1. 处于恶劣的海洋环境之中,所受的外载荷复杂2. 作业状态的多样性(多工况)3. 恶性事故率较高四、平台结构强度的分析方法1. 环境载荷的特点——动态,随机2. 强度分析方法(1) 设计波法(确定性方法)(2) 设计谱法(概率方法)第一章环境载荷§1.1平台载荷的分类{平台载荷使用期间建造期间:{环境载荷工作载荷施工载荷1. 环境载荷——直接(风、浪、流、冰、地震),间接(锚泊力)返回2. 工作载荷静力载荷:恒定载荷(结构设备重量)可变载荷(压载水,钻井器材)活动载荷(移动设备的重量)动力载荷(例如钻机运转、起吊时的动载荷,直升机着降引起的冲击载荷)返回3. 施工载荷——建造施工,海上吊装返回§1.2 风载荷一、风载荷(水平风力)的计算公式风对结构的作用力:沿着风速方向---水平风力垂直风速方向---升力⎩⎨⎧=⋅⋅⋅=22100V P C C A P F s h ρ二、设计风速与受风投影面积的确定1. 设计风速V:作业海区的统计资料+规范的有关规定2. 投影面积A:封闭结构或透空结构(桁架)三、脉动风压的影响(动力效应)sh C C A P F ⋅⋅⋅⋅=0ββ=145175.~.§1.3 波浪载荷一、波浪理论的选择1. 几种重要的波浪理论2. 各种波浪理论的适用范围3. 选择波浪理论的主要依据1. 几种重要的波浪理论(1) 艾里(Airy)波:深水和浅水中的微幅波,线性理论(波峰波谷形状对称)(2) 斯托克斯(Stokes)高阶波:深水中的有限幅波,非线性理论(波谷形状较平坦)(3) 椭圆余弦波:浅水中的有限幅波,非线性理论(4) 孤立波:极浅水中的有限幅波,非线性理论返回2. 各种波浪理论的适用范围(水深h、波高H、波浪周期T、波长λ)返回3. 选择波浪理论的主要依据——平台的工作水深返回艾里波理论的主要公式设水深h,波高H,波浪周期T,波长λ,则波频波数扩散关系ωπ=2Tk=2πλgkhk2)tanh(ω=⋅)sin()cosh()](cosh[2),,,(t kx kh z h k gH t z y x ωωφ−⋅+⋅=ζ∂φ∂ω(,,)cos()x y t g t H kx t z =−=−=120(1) 速度势(2) 波面升高速度:⎪⎪⎩⎪⎪⎨⎧==z w x u ∂∂φ∂∂φ u u t w w t ==⎧⎨⎪⎪⎩⎪⎪∂∂∂∂(3) 水质点的速度和加速度加速度:p x y z t t g g t H k h z kh kx t k h z kh w w (,,,)cosh[()]cosh()cos()cosh[()]cosh()=−=≡−=⋅+⋅−=⋅+⎧⎨⎪⎪⎩⎪⎪ρ∂φ∂ρζζ∂φ∂ωζ2(4)脉动压力二、波浪载荷计算概述1. 波浪(诱导)载荷的成分拖曳力-起因于物体对水流的扰动,粘性效应惯性力-起因于入射波压力(F-K 力)和流体的惯性(附加质量力)绕射力-起因于物体对水流的扰动,绕射效应2. 海洋结构物按尺度的划分波浪载荷{小尺度构件(特征尺寸与波长之比D/λ≤0.2)-以拖曳力和惯性力为主,莫里森公式大尺度构件(特征尺寸与波长之比D/λ>0.2)-以绕射力和惯性力为主,势流理论{三、应用莫里森公式计算小尺度构件的载荷1. 莫里森(Morison)公式2. 无因次的拖曳力系数和惯性力系数1. 莫里森(Morison )公式计算垂直构件轴线方向的单位长度波浪力(1) 原始形式:固定垂直立柱的单位长度波浪力u V C u V u u A C u V C u u A C f mD M D G G G G G G G G ρρρρρ++=+=2121(2) 一般形式:计及结构运动(刚体运动和弹性变形)的任意方向构件的单位长度波浪力rR m n N r r D u V C u V u u A C f G G G G G ρρρ++=21返回fG (拖曳力+惯性力)(拖曳力+F-K 力+附加质量力)2. 无因次的拖曳力系数C D和惯性力系数C M(1)拖曳力系数C D 取决于:物体截面形状、表面粗糙度、雷诺数等,通常依赖试验测定(2)惯性力系数C M=1+C m :一般可按势流理论计算或试验确定返回四、应用势流理论计算大尺度构件的载荷1. 绕射问题总速度势绕射速度势满足总速度势脉动压力力和力矩φφφ(,,,)(,,,)(,,,)x y z t x y z t x y z t W D =+φD x y z t (,,,)⎩⎨⎧][],[],[],[][R S B F L 各部分边界条件流体域内的连续性方程⇒φD φφφ=+W D ⇒p t =−ρ∂φ∂G G G G G F pnds m r pnds S o S ==×⎧⎨⎪⎩⎪∫∫∫∫2. 计算方法(1) 理论方法(2) 半理论半经验方法——F-K 法波浪力F c F K=⋅{解析法:仅适合于圆柱体数值方法(三维分布源法):适合于一般形状的大型物体§1.4 流和冰载荷一、海流载荷二、冰载荷一、海流载荷1. 考虑定常海流对结构物作用的通常做法(1) 浪、流联合作用:在莫里森公式中取(2) 流的单独作用:2. 流速沿深度z 的变化G G G u u u W C=+G G G f C A u u D C C=12ρu C 返回二、冰载荷1. 冰载荷的成分冰载荷2. 冰原对垂直桩柱的最大挤压力的计算:冰原的最大挤压力P移动冰原的挤压力流冰的撞击力其它⎧⎨⎪⎩⎪有效接触面积冰所能承受的单位面积最大挤压力m k bh k R C ⋅⋅⋅⎧⎨⎩⎫⎬⎭21P mk k R bh C =12⇒下一页3. 流冰对桩柱的最大撞击力和最大切入深度的计算功能关系ΔE W =流冰动能减少桩柱切入冰块做功冰压力ΔE BLh v W p x dx PX p x mk R bh mk R hx X C C =====⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪∫122012112()()()tan ραX v BL mk R P vh BL mk R C C ==⋅⎧⎨⎪⎩⎪ραρα2211tan tan ⇒( 可取=2.5,=0.9 ) 1k ρt m 3返回第二章锚泊静力计算§2.1锚泊系统与布锚形式一、锚泊系统功能与锚链布置形式1.锚泊系统功能(相当于非线性弹簧):提供恢复力;限制活动范围2.锚链布置形式的特点:辐射状,对称性二、锚泊系统分析的两种典型问题1. 平台定位计算(正问题)2. 平台强度校核(逆问题)§2.2锚链特性分析—悬链线理论一、锚链特性分析—悬链线理论1. 悬链线的力学模型(悬链线与锚链)2. 悬链线基本方程的导出T T T T T wl dh ds H O V =====⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪cos sin tan θθθ⇒a l ds dh =w T a O ≡du ds au=+112u dh ds ≡sinh −=1u s adh ds s a =sinh ()h a s a =−cosh 1⇒⇒⇒⇒3. 锚链状态参数之间的关系(1) 以参数和表示(2) 以参数和表示4. 锚链的强度条件【例】锚链状态参数计算a a s h h a l a sa s a =−=⎧⎨⎩(cosh )sinh 1s a l h s a a h =+=+⎧⎨⎪⎩⎪−cosh ()1112T T T Kb max []≤=k dT dx w da dx xx H ≡=⋅h const=x s l const dx ds dl ds da l h ah dl da k w dx da ww h a s a s a hl h l xx sahls as a=−+→=−=−→=−=+→=⎫⎬⎪⎭⎪⇒==−=−cosh ()tanh 1222222二、单链的链端刚度1.链端刚度的概念2. 链端刚度的计算公式三、链端位移引起的链态变化1. 链端离开原悬垂平面做水平位移所引起的链态变化(图)2. 链端位移后的锚链状态参数计算链态参数间的关系式()()l s l s u1100−=−−≈⎧⎨⎩δδ⇒[]l s h f a aha hha −=+−+≡−1211cosh ()()h const=§2.3锚泊系统的静力分析一、系泊平台的运动与受力分析1. 坐标系引入3个坐标系:2. 平台的平面刚体运动平台位移向量3. 平台受力分析平台在作用下,于某位置处达到静力平衡大地坐标系固连平台坐标系局部坐标系O XYZ o xyzA −−−⎧⎨⎪⎩⎪ ξη{}()D u v C C C T=,,φ锚泊力未知其它外力已知()()⎧⎨⎩⎫⎬⎭二、建立平台锚泊系统的刚度方程思路:平台刚体位移各着链点在水平面内的位移单根锚链的恢复力同一着链点处的各锚链恢复力合成着链点处恢复力向C点简化组装成锚泊系统的刚度方程1. 平台运动引起的着链点的位移其中转换矩阵{}C D ⇒⇒⇒i {}D i u u y v v x i C ii C i =−=+⎧⎨⎩φφΔΔ{}[]{}C i iD D λ=[]λi i i y x ≡−⎛⎝⎜⎞⎠⎟1001ΔΔ⇒⇒⇒2. 着链点i 的各锚链恢复力的合成(1) 单根锚链j 提供的恢复力其中单链j 刚度矩阵(2) 着链点i 的m 根锚链恢复力的合成其中着链点i 刚度矩阵{}ΔF i j⎩⎨⎧⋅Δ=Δ⋅Δ=Δ+=Δjij yij jij xij j i j i j xx ij f f f f v u k f ααααsin cos )sin cos ()(⇒{}[]{}i j jiD k F =Δ[]k k jxx j jj j j jj ≡⎛⎝⎜⎞⎠⎟()cos cos sin cos sin sin 22αααααα{}iF Δ{}{}ΔΔF F i i jj rr m ==+−∑1⇒{}[]{}ΔF K D i i i =[][]∑−+=≡1m r rj jik K3. 锚泊系统的刚度方程其中组合刚度矩阵⇒{}{}ΔΔF F CiC i n==∑1{}[]{}ΔFK D CCC=[][]K K C iC i n≡=∑1(3) 着链点i 的合成锚链恢复力向C 点简化其中刚度矩阵{}C iF ΔΔΔΔΔΔΔΔΔΔF F F F M y F x F xi C xiyi C yi i C i xi i yi===−+⎧⎨⎪⎪⎩⎪⎪{}[]{}i T i C i F F Δ=Δλ{}[]{}ΔF K D i C i C C =[][][][]K K iCiT ii≡λλ⇒⇒三、系泊平台平衡位置的确定以及锚泊力的计算1. 计算原理牛顿迭代法:2. 计算框图0000000=≈+′−⇒=−′f x f x f x x x x x f x f x ()()()()()(){}{}{}{}{}[]{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧===′+≡∑∑∑CCCi CCi dD K dF dF F F F 组合刚度矩阵:平台平衡方程:0⎯⎯⎯⎯→⎯牛顿迭代法{}{}[]{}llC l C l C F KD D 11−+−=第三章自升式平台§3.1自升式平台的典型工况与平台强度校核内容一、自升式平台的典型工况二、自升式平台强度校核内容根据不同工况下平台的受力特点,选取总体和局部结构(船体、桩腿及固桩区)在最不利的工况下进行强度校核。
系泊系统的设计数学建模

系泊系统的设计数学建模一、引言系泊系统是一种常见的海洋工程设施,用于将船只或其他海洋结构物固定在水面或水下的一种装置。
设计一个高效可靠的系泊系统对于确保船只安全停靠以及海洋工程设施的稳定非常重要。
本文将介绍系泊系统设计的数学建模方法,通过数学模型来分析和优化系泊系统的设计。
二、系统建模1. 系泊系统的力学模型系泊系统的力学模型是研究系泊系统的基础。
通过力学原理和静力学平衡条件,可以建立系泊系统的力学方程。
其中包括各个力的平衡方程、物体的运动方程等。
通过求解这些方程,可以得到系泊系统的各个参数,如系泊绳的张力、浮标的位置等。
2. 系泊系统的动力学模型系泊系统在海洋环境中受到风浪等外界力的作用,因此需要考虑系统的动力学特性。
通过建立动力学模型,可以分析系泊系统的振动特性和响应能力。
常用的方法包括振动方程的建立和求解、频域分析等。
通过分析动力学模型,可以得到系泊系统的自然频率、阻尼比等参数。
三、优化设计1. 系泊系统的参数选择在设计系泊系统时,需要选择合适的参数,如系泊绳的长度、材料、直径等。
通过数学模型,可以分析不同参数对系泊系统性能的影响,从而选择最佳的参数组合。
例如,通过分析系泊绳的长度与稳定性的关系,可以确定最佳的系泊绳长度。
2. 系泊系统的布置方式系泊系统的布置方式也对系统性能有重要影响。
通过数学模型,可以分析不同布置方式对系统稳定性、抗风浪性能等的影响。
例如,通过分析不同锚点数量和位置的影响,可以选择最佳的系泊系统布置方式。
四、案例分析以某港口停泊船只的系泊系统设计为例,利用数学建模方法对系统进行优化设计。
通过建立力学模型和动力学模型,分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,得到最佳的系泊系统设计方案。
五、结论通过数学建模方法,可以对系泊系统的设计进行分析和优化。
通过建立力学模型和动力学模型,可以分析系泊系统的力学特性和动力学特性。
通过优化参数选择和布置方式,可以得到最佳的系泊系统设计方案。
海洋数值模型的理论及应用
U
+
Fx= H2AM
+ HAM
D s
S M , S H 值分别为2.0145
1
0
D s
条件下,它下限值为
-0.28,对应的 S M , S H 值分别为 0.0470和 0.0461。
E1, E2, E3, B1 是2.5阶M-Y湍流闭合模式参数,由实验测得
2021/6/16
15
M—Y湍流模型的适用条件
M-Y湍流模型已被广泛应用于浅海潮汐,风生
的垂向坐标系的不同大致经历了如下几个发展阶
段
最早出现并且还在使用的海洋模型是Bryan等人
开发的基于原始方程的低阶精度的有限差分模型,
它在水深方向采用z坐标系
目前常见的HOPS( Harvard Ocean Prediction
System ),MOM( GFDL Modular Ocean
y
=
T
,,
S
q
,
q
l
2 2
(16)
AH
H
(15)
是水平热扩散系数,一般地,A M
是一个小
值,取0.1或0.2,甚至在某些情况下可以取为0
2021/6/16
19
垂向边界条件
1. 海面
s 0
K M u v
2
2 1/2
,
= - a Cs U10 V10 (U10 ,V10 )
海水运动方程推导过程中的动力学假设比如海水静力学假设都是建立在大部分空间尺度大于10km时间尺度大于惯性周期偏微分方程本身是非线性的将一个实际问题具体化时所需要的环境场如海底地形海岸线几何形状表面驱动力等都无法给出解析函数表达式只能在离散化的空间和时间区域取得因此求解海水运动方程只能通过近似求解的办法来确定而这些数值解又可能引入明显的近似误差海洋模型到按其水平网格的离散方式以及所使用的垂向坐标系的不同大致经历了如下几个发展阶段最早出现并且还在使用的海洋模型是bryan人开发的基于原始方程的低阶精度的有限差分模型它在水深方向采用目前常见的hopsharvardoceanpredictionsystemmomgfdlmodularoceanmodelpopparalleloceanprogramncomncarcommunityoceanmodel模型在某种程度上都可以认为是该模型改进版上个世纪70年代sigma坐标系开始应用于海洋模型在水深方向比如目前被广泛使用pomprincetonoceanmodelestuarinecoastaloceanmodelregionaloceanmodelingsystem模型都属于这种类型的模型坐标系相比sigma坐标可以更好地贴合海底地形变化自上世纪90年代以来非结构化网格技术开始在海洋模型中得到应用相应的也出现了基于非结构化网格离散方式的有限元模型如eom模型spectralfiniteelementoceanmodel和有限体积模型如fvcom非结构化网格可以更好地拟合陆地边界但是代码实现上的困难以及计算稳定性的问题使其迄今还没有得到非常广泛的应用新一代的海洋模型广泛采用随地坐标系terrainfollowingcoordinates进而促进了有关时间步长对流项和压力梯度项等数值算法的改进进入新世纪以来下一代的海洋数值动力模型正在紧锣密鼓的研制中代表性的是tomsterrainfollowingoceanmodelingsystem它融合了目前最先进的物理知识数值方法和数据同化技http
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
海洋平台系泊数值分析基本理论及计算方法
通常认为,船舶码头系泊的主要因素可以看作以下几个部分 码头、护舷、系泊缆、系泊结构物船舶或者平台、环境载荷。以上几个因素相互影响,相互作用,最终决定系泊的结果。当前系泊状态主要受到风、浪、流三种载荷,按照静力计算方式或者采用经验公式可以对风、流载荷进行估算和确定,但是波浪力比较特殊,是其中唯一的动载荷,码头系泊的动态船舶运动特性可以看作波浪与结构物的相互作用。波浪力在早期的研究中往往简化为平均波浪力或者等效波浪力,在考虑风载荷和流载荷的叠加后,大多采用静态、准静态方法进行实际的缆绳受力、护舷受力计算,并没有考虑到波浪的动态属性。 系泊缆绳的张力计算需要遵循一定的计算准则,在上个世纪80年代左右,chemjawski、Michaell就已经提出了一种解析方法来求解计算船舶系泊缆张力。求解的方法有以下几个重要步骤 1通过计算确定设定的方向船舶承受的风、流和等效静波浪力 2计算求得由船舶横摇、纵摇、垂荡运动引发的垂直方向静回复力 3用系泊揽本身属性如长度、横截面积、方向角度、弹性模量非线性等属性作为基础计算求出系泊缆绳的刚度矩阵 4最后一步,求出整个系泊系统的总的刚度矩阵,采取提高载荷大小的方式进行迭代计算从而求得每个缆绳的张力值。 2 三维势流理论 在早期的码头系泊计算时往往采用静力或者准静力的计算方法,后来理论发展,计算方式大多采用频域或者时域分析方法。静力或准静力分析方法仅适用与水域状况较好、系泊船舶等运动不大的情况,由此得出系泊缆绳、护舷受力和系泊物体的运动。时域方法结合三维势流理论、脉冲响应原理、缆绳护舷的非线性很好的解决了各种情况下系泊物体的码头系泊问题。 为了适应实际工程问题,三维势流理论针对流体的性质进行了相应的简化,假设流体为无粘性、无旋、均匀的且不可压缩的理想流体。之所以这样简化是因为 l波浪的波幅和系泊浮体相比量级很小,绕射作用明显大于粘性影响,所以忽略粘性 2对于理想流体而言,初始运动无旋,之后任意时刻运动均无旋,无旋假定合理 3流体本身的密度几乎不发生变化,水密度假设为均匀和不可压缩也是合理的。波浪以及结构物的运动状态在液体自由表面附近都可以看作是微幅运动。根据连续性方程和NS方程推导求解流体运动方程,可将其简化为拉普拉斯积分的形式。 3 环境载荷计算 环境载荷主要包括风载荷、流载荷和波浪载荷。 3.1 风载荷 实际上,最有效的风载荷计算方法为风洞试验,Freathy和Vickery对半潜平台进行风洞试验,研究平台倾角、风向、上建布置等参数对风载荷的影响,最终结果对比规范,得出平台在不发生倾斜时的风洞试验结果和规范最为接近,一旦倾斜,结果相差很大。工程上常采用模块法计算海上结构物风载荷,这也是ABS和DNV建议的方法。这种方法主要要采用将整个结构物分解成不同的模块,通过计算每个模块标准化的的风载荷的手段,最后叠加得到总的风载荷。所以其部分计算结果很大程度上影响总体的准确性。在海面高度z的风速为 1 式中 zr参考高度 vzr参考高度风速 p指数。 3.2 流载荷 对于平台水下部分进行流载荷分析,求出流载荷系数需要利用不可压缩流体的连续性方程和NS方程。应用有限体积法对控制方程进行离散,使得自升式平台水下受到流作用力能通过数值方式进行求解。 3.3 波浪载荷 海洋浮式结构物受到的波浪载荷包括 一阶波浪力随波频变化、二阶平均波浪力和速变和频及缓变差频波浪漂移力、高阶脉冲力。 一阶波浪本文由论文联盟收集整理力值与波幅成正比。二阶波浪力在包含两个频率wi和wj时,和频力是包含wi+wj的项,差频力则是带有wiwj的项,此外二阶力还包括一个平均成分。相对于一阶力,二阶力的量级小很多。和频力主要在TLP平台垂荡、纵摇、横摇运动的共振时候考虑 差频力的作用主要体现在海洋结构物系泊状态下纵荡、横荡、首摇的运动响应上。 4 结束语 本文对于海洋平台系泊数值分析所需的基本理论和一些重要参数的计算方法进行阐述,为数值分析奠定了基础。