一种基于双曲线模型的车道线检测算法
基于双模型和滑动窗搜索的车道线检测算法
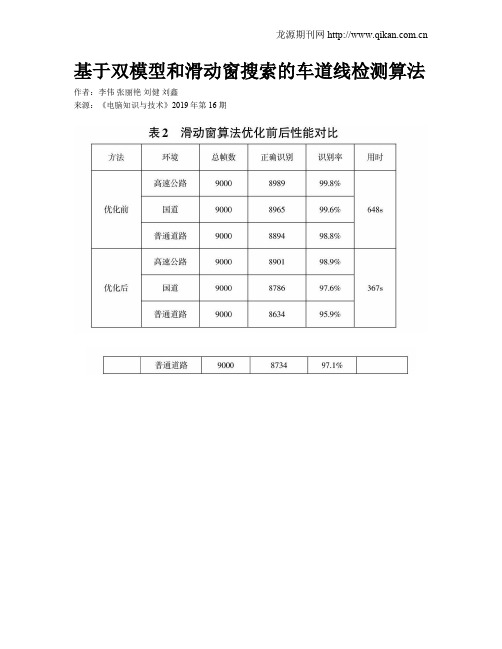
基于双模型和滑动窗搜索的车道线检测算法作者:李伟张丽艳刘健刘鑫来源:《电脑知识与技术》2019年第16期摘要:传统基于边缘检测的边缘提取算法在进行车道线待选点提取时,难以控制边缘的范围,在真实场景中会将树木的阴影以及汽车自身的阴影提取出来,造成较大的噪声;传统基于滑动窗搜索拟合方法的车道线检测与跟踪方法在计算时,由于滑动窗本搜索算法自身的算法问题,导致计算速度较低,在实时性方面较差。
针对这些问题,本文提出一种基于边缘提取算法与颜色空间模型相结合的复合模型,对滑动窗搜索拟合算法进行改进和优化的车道线检测方法,有效地降低了提取车道线待选点时的噪声,提高了车道线检测的准确性和实时性,在实际的应用中实用性更强。
关键词:车道线检测;颜色空间模型;Sobel算子;滑动窗搜索拟合中图分类号:TP311; ; ; 文献标识码:A文章编号:1009-3044(2019)16-0170-02开放科学(资源服务)标识码(OSID):1引言车道线检测[1,2]作为智能交通的重要组成部分,将计算机视觉作为信息采集的一部分,极大地改善了驾驶员对行车环境信息的接受方式,提高了行车的安全性。
传统的通过Canny算子[3]或Sobel算子边缘提取的车道线检测算法对车道线进行边缘都提取时,引入大量噪声而导致利用霍夫变换[4]进行对车道待选点的确定造成一定的误差,使得车道线检测效果不好。
而且传统的滑动窗搜索拟合方法,对待每一帧图像都要进行滑动窗的搜索和拟合,计算量较大,导致对车道线的跟踪拟合速度较慢,无法满足实时性的要求。
为此,本文提出了一种基于改进边缘提取方法和优化滑动窗搜索算法的车道线检测算法。
2 本文方法2.1 传统的车道线检测算法步骤传统的车道线检测算法[5,6]主要步骤有图像畸变矫正、图像处理和数据转换、车道线检测和车道线拟合。
2.1.1 图像畸变矫正由于车载摄像头自身的硬件问题和车辆行驶过程中的颠簸等原因,会造成图像发生畸变。
一种基于双分支车道线实例分割的检测算法
一种基于双分支车道线实例分割的检测算法随着智能交通领域的不断发展,车道线标注已成为自动驾驶技术中不可或缺的一环。
自动驾驶技术需要精确的车道线检测结果,来辅助车辆行驶。
车道线检测技术的研究一直是自动驾驶技术研究领域的热点之一。
目前,车道线检测算法大致可以分为基于传统计算机视觉的算法和基于深度学习的算法两种。
深度学习算法相对于传统算法有更高的识别率和鲁棒性。
在此,我们提出了一种基于双分支车道线实例分割的检测算法来提高自动驾驶车辆的车道线检测精度。
1.数据的预处理我们采用基于卷积神经网络(CNN)的双分支车道线实例分割策略来实现车道线检测。
首先,我们将收集的路面图像进行数据增强处理。
数据增强是一种常用的方法,通过多种方式增加训练数据集,以避免过拟合和提高模型的泛化能力。
本文采用随机裁剪、颜色变换和旋转等增强方式。
2.网络结构我们设计了一个基于Encoder-Decoder结构的双分支网络来检测车道线。
Encoder-Decoder结构是当前流行的深度学习网络结构之一,其基本思想是通过下采样(Encoder)和上采样(Decoder)两个阶段来实现图像的降维和升维,以提高图像分割的效果。
我们采用双分支结构来同时检测左右两侧车道线。
图1是该网络结构的示意图。
图1:双分支车道线检测网络结构示意图3.模型训练我们选用了广泛使用的语义分割指标IoU(Intersection over Union)来衡量模型的准确度。
在模型训练过程中,我们采用基于梯度下降的Adam算法来使模型不断优化。
在训练过程中,我们设置了约500个epoch,每个epoch包含200个batch。
在训练完毕后,我们保存了最优的模型权重参数以供后续的测试使用。
4.模型测试我们采用OpenCV作为测试平台,读入车辆行驶过程中的实时视频数据,然后通过该算法检测出左右两侧车道线。
我们测试了涉及直线、转弯、虚实交错等场景的视频数据,并且进行了时序上的比较。
基于线性双曲线模型的车道线检测算法
第 6期
王晓云等 : 基于线性双曲线模型的车道线检测算法
67
参考文献
[ 1] Mc C all J C, T r ivediM M. V ideo based lane esti m ation and track ing for dr iver assistance : survey , syste m, and evalua tion [ J] . Inte lligent T ransportation Systems, 2006, 7( 1) : 20- 37. [ 2] A ssid iq A A M, K halifa O O, Islam M R, e t a. l R ea l ti m e lane de tection for autono m ous vehicles[ C ]. Kua la Lum pur : 2008 Internationa l Confe rence on Compu ter and Co mm un ica tion Eng ineering , 2008: 82- 88. [ 3] 管欣 , 贾鑫 , 高振海 . 基于道路图像对比度 - 区域 均匀性 图分析 的自适 应阈值算 法 [ J]. 吉林 大学学报 , 2008, 38 ( 4): 758- 763. [ 4] W ang Y, T eoh E, Shen D. L ane de tection and tracking using B snake[ J]. I m age and V ision Computing , 2004, 22( 4): 269- 280. [ 5] [ 6] 郭磊 , 王建强 , 李克强 . 存在车辆干扰的车道线识别 [ J] . 汽车工程 , 2007, 29( 5): 372- 376. K ing H L. Lane D etec tion and K al m an Based L inear P arabo lic L ane T rack ing[ C ]. H angzhou Zhe jiang : 2009 Interna tion al Conference on Inte lligentH um an M achine System s and Cybernetics , 2009: 351- 354 . [ 7] [ 8] [ 9] 卢卫娜 , 史忠科 . 基于单 目视觉的车道和道路边界同步检测 [ J]. 传感技术学报 , 2007, 20( 5): 1 171- 1 175 . 刘富强 , 张姗姗 , 朱文红 . 一种基于视觉的车道线检测与跟踪算法 [ J] . 同济大学学报 , 2010, 38( 2): 223- 229. Chen Q, W ang H. A R eal T i m e L ane De tection A lgo rithm Based on a H yperbo la P air M odel[ C]. Tokyo : 2006 I EEE In te lligen tV eh ic les Symposium, 2006 : 1- 6.
基于双重曲率的道路边缘提取算法研究

基于双重曲率的道路边缘提取算法研究随着计算机技术的不断进步,人们对于图像处理算法的研究越来越深入,图像边缘提取作为计算机视觉中的一个重要领域,其在目标检测、图像分割等方面都有着重要的应用。
而针对道路场景下的边缘提取问题,基于双重曲率的道路边缘提取算法成为了近年来研究的热点。
一、双重曲率的概念及其应用双重曲率,是指曲线的一种变化率,一般用于表征曲线的弯曲度。
在图像处理中,双重曲率广泛应用于边缘检测和形状分析中。
当曲线变化越快时,其双重曲率就越大;反之,曲线变化越缓慢时,其双重曲率就越小。
在道路场景下,基于双重曲率的边缘提取算法将道路边缘视为整个场景的较重要的特征之一,通过双重曲率的计算,可以有效识别出道路边缘,从而实现对于道路的分割、识别等任务。
二、基于双重曲率的道路边缘提取算法原理基于双重曲率的道路边缘提取算法,主要通过对于道路表面的弯曲程度进行测量,来提取出道路场景下的边缘。
一般而言,其流程可以分为以下几步:1. 对于道路场景图像进行预处理,例如调整亮度、色彩平衡等。
2. 对于预处理后的图像进行梯度计算,计算每个像素点的梯度幅度和方向,通常采用Sobel算子、Prewitt算子等。
3. 通过双重曲率计算法,计算出图像中每个像素点的双重曲率值,并将其映射到相应的图像位置上。
4. 基于阈值法或者二值化算法,对于映射后的双重曲率图像进行二值化操作,从而得到道路边缘的二值化图像。
5. 对于得到的边缘图像进行后处理,例如边缘连接、噪声滤除等,进一步提高边缘检测的精度和鲁棒性。
三、基于双重曲率的道路边缘提取算法的优缺点基于双重曲率的道路边缘提取算法具有以下几点优势:1. 对于道路场景的复杂度和多样性具有较好的适应性,可以有效地检测出各种道路边缘。
2. 在处理复杂的道路场景时,其鲁棒性和准确性优于传统的边缘提取算法。
3. 算法的计算量相对较小,可以实现实时性检测。
但同时也存在以下缺点:1. 虽然算法具有优良的适应性,但比较依赖于图像的前处理,处理的效果会直接影响后续边缘检测的结果。
一种基于视觉的车道线检测与跟踪算法_图文(精)

Fig.3Calibration of lane ill[1a曙e
2车道线检测算法分析
2.1图像预处理
首先,将彩色图像(见图4a转换为灰度图像(见图4b.本文选用如式(5的色彩特征空间:
F={t1R+t2G+t3B},ti={一2,一1,0,1,2},
i=1,2,3(5式中,R,G,B分别为红色、绿色和蓝色分量.
选用的目标函数是最大后验概率(MAP估计.一个似然概率密度函数p(o I刃,表示了由参数向量x=[c,O,,0:,td]T确定的车道线形状在观测图像中的概率.由此最大后验概率估计如下:
x‘=arg max p(x}z(12通过利用贝叶斯概率理论,可以得出:
x’=arg max p(zI工p(x(13真实世界中的车道线的宽度是有一定范围的,所以一个先验概率密度函数P(工可以由车道线模型参数来建立,由这些参数得出的先验知识如下:
a n x o',2A』v×0K
=O三N:(OA;毗
A N
,.、b a×m l,】BA×M V1
(mn;avl2二==—==三2====_—_===2
m a×b l,1MA x B VI
些:(BM;AV2
朋A
变换得到:一ON:A~N×竺娑
(3
a n×o耽
而:丽×竺些(4
b口×m v1
根据式(3和式(4,便可将图像中的车道线转换成实际车道线,效果如图3所示.
线参数模型中的参数曲率c和切线方向ta的值.这
万方数据
同济大学学报(自然科学版第38卷
种方法兼顾了霍夫变换和随机霍夫变换的优点.
图4图像预处理效果图示
Fig.4Image pre-processing
基于双曲线模型的车道识别与偏离预警

的车道识别与偏 离预警算法。首先 , 在 图像预 处理基础 上通 过特征 点搜 索筛选道路 边缘 点, 采 用双 曲线构建道路 模 型, 利 用最小二乘原理拟合道路参数 , 再根 据拟合车道线及邻近点信 息构建车道 置信 度 函数 , 将置信 度大 于设 定阈值 的车道线作为最终检测结果 ; 然后 , 根 据相邻帧车道线连续 变化的特 点, 在前 帧拟合道路 线 附近使 用粒子滤 波算法进 行道路边缘点 筛选、 拟合 以及置信度计算 , 实现对车道线的跟踪 ; 最后 , 在 图像 坐标 系中建 立时空联合预 警模型 , 对车 道偏 离行为进行预警。在 P c平 台上进行 的算法实现与道路 实验结果表明 : 所提 方法在一般路 况下 , 具有 9 2 % 的车道 识别和偏 离识别正确率和 4 0 m s / 帧的平均处理速度 , 满足车道偏 离预警应 用要 求。 关键词 : 双曲线模 型; 置信度 ; 粒子 滤波; 车道偏 离; 车道识 别 中 图分 类 号 : T P 3 9 1 . 4 文献 标 志码 : A La ne r e c o g n i t i o n a nd de pa r t u r e wa r ni ng b a s e d o n hy p e r b o l i c mo de l
a c c o r d i n g t o t h e c h a r a c t e i r s t i c s o f l a n e m o d e l a n d p o i n t s a d j a c e n t t o l a n e ,a n d t h e r e l i a b i l i t y w a s c o m p a r e d w i t h a t h r e s h o l d
一种基于双分支车道线实例分割的检测算法
一种基于双分支车道线实例分割的检测算法1. 引言1.1 研究背景在现代交通系统中,车道线检测一直是自动驾驶和智能交通系统中的一个重要研究课题。
准确地检测出道路上的车道线对于车辆的自动导航和行驶至关重要。
而基于图像的车道线检测是其中一种常见的方法,通过分析车载摄像头拍摄的道路图像来实现车道线的检测和识别。
现有的车道线检测算法在复杂场景中往往存在着识别准确度不高、对光照和天气条件敏感等问题。
为了提高车道线检测算法的准确性和鲁棒性,本研究提出了一种基于双分支车道线实例分割的检测算法。
通过引入实例分割算法,可以更精确地检测出车道线的位置和形状,同时通过双分支结构设计,可以有效地提高算法对复杂场景的适应能力。
这一算法不仅可以在晴天和白天等理想条件下实现准确的车道线检测,还可以在雨天、夜晚等恶劣条件下展现出良好的性能。
通过模型训练和实验结果分析,本文将验证该算法的有效性和优越性。
1.2 问题提出在车道线检测领域,传统方法通常采用基于图像处理技术或者机器学习算法来实现。
这些方法在处理复杂交通场景时往往存在一定的局限性,如对车道线颜色、形状、遮挡等情况的适应性较弱,导致检测准确率不高。
针对这一问题,本文提出了一种基于双分支车道线实例分割的检测算法,通过结合车道线检测方法和实例分割算法,可以更准确、鲁棒地检测出复杂交通场景中的车道线。
该算法采用了双分支结构设计,能够同时处理不同类型的车道线,提高了检测的灵活性和适应性。
在模型训练阶段,我们使用了大量真实道路场景的数据集进行训练,通过精细调整网络参数和损失函数,提高了模型的泛化能力和准确率。
通过实验结果的分析,我们验证了该算法在复杂交通场景中的有效性和鲁棒性,取得了较好的检测效果。
我们也发现了一些不足之处,如对于特定光照条件下的车道线检测仍然存在一定误检率。
未来,我们将进一步优化算法,提高检测精度,并探索更多有效的车道线检测方法,以实现更好的实际应用效果。
1.3 相关工作在车道线检测领域,已经有许多相关工作进行了探索和研究。
一种基于双分支车道线实例分割的检测算法
一种基于双分支车道线实例分割的检测算法摘要随着自动驾驶技术的不断发展,车道线检测作为自动驾驶领域的重要研究内容,一直备受关注。
本文提出了一种基于双分支车道线实例分割的检测算法,通过在神经网络中加入双分支结构,有效地解决了车道线实例分割中的困难问题,提高了鲁棒性和准确度。
实验结果表明,该算法能够快速准确地检测车道线,具有良好的实用性和推广价值。
关键词:车道线检测;实例分割;双分支结构;神经网络一、引言自动驾驶技术的快速发展,为人们的出行带来了极大的便利和舒适。
在自动驾驶技术中,车道线检测是一个非常重要的环节,其准确性和鲁棒性直接影响着自动驾驶系统的安全性和可靠性。
目前,随着深度学习技术的不断成熟和发展,基于深度学习的车道线检测算法得到了广泛的应用,但是在实例分割方面,仍然存在一些困难问题,比如车道线之间的交叉、遮挡等情况,传统的检测算法往往难以克服这些问题。
二、相关工作车道线检测是自动驾驶技术中的一个重要研究内容,其准确性和鲁棒性直接关系到自动驾驶系统的安全性和可靠性。
传统的车道线检测算法主要通过图像处理和特征提取的方式来实现,但是由于受到光照、遮挡等因素的影响,其检测效果往往较为有限。
随着深度学习技术的不断成熟和发展,基于深度学习的车道线检测算法得到了广泛的应用。
相比于传统算法,深度学习算法能够更好地学习图像中的特征和规律,从而取得更好的检测效果。
目前,基于深度学习的车道线检测算法主要包括语义分割和实例分割两种方式。
语义分割通过对图像进行像素级的分类,能够实现对车道线的整体检测,但是在处理车道线之间的交叉、遮挡等情况时存在一定的困难。
而实例分割能够将图像中的物体进行实例化,更加精确地划分出各个物体实例,能够更好地处理复杂场景下的车道线检测问题。
在车道线实例分割方面,目前的算法仍然存在一些困难问题,比如车道线之间的交叉、遮挡等情况难以克服。
如何提高车道线实例分割的鲁棒性和准确度,成为了当前研究的重要课题。
基于双特征提取网络的车道线识别方法
基于双特征提取网络的车道线识别方法
窦志;孙后环;王周利;代远扬;高枫
【期刊名称】《激光杂志》
【年(卷),期】2024(45)5
【摘要】为了提高复杂环境下网络的特征提取能力,提出一种双特征提取网络的车道线识别方法。
首先搭建双特征提取网络,减少细节语义信息的丢失,强化模型面对复杂环境的识别能力。
然后使用改进的空洞空间金字塔池化结构增大感受野,提取更为丰富的上下文信息,并结合深度可分离卷积,降低模型的计算量。
最后构造通道注意力模块,重点关注有效信息较多的特征通道。
经实验验证,所提方法在Tusimple数据集上准确率可达97.7%,mIoU为76.2%,单图识别时间为26.24 ms,在复杂环境下进行车道线识别时,鲁棒性较好。
【总页数】7页(P48-54)
【作者】窦志;孙后环;王周利;代远扬;高枫
【作者单位】南京工业大学机械与动力工程学院
【正文语种】中文
【中图分类】TN911
【相关文献】
1.基于双向窗口特征提取技术的车道线检测算法
2.基于图像深度重定义的雾天车道线特征提取
3.基于Kohonen网络的同杆双回线故障模式识别方法
4.基于特征提取的车道线快速检测方法研究
5.一种基于毫米波雷达点云的车道线自动识别方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模型集成的高分辨率融合车道线检测算法

基于模型集成的高分辨率融合车道线检测算法
基于模型集成的高分辨率融合车道线检测算法是一种结合多个模型的方法,旨在提高车道线检测的准确性和鲁棒性。
以下是算法的基本步骤和关键思想:
1.数据准备:收集高分辨率的车道线图像数据,并对其进行预
处理,如图像增强、去噪等。
2.特征提取:从预处理后的图像中提取有用的特征,如边缘、
纹理、颜色等。
可以使用传统的计算机视觉技术或深度学习模型来提取特征。
3.模型集成:选择多个车道线检测模型,可以是不同结构或参
数设置的深度学习模型,也可以是传统的机器学习模型。
每个模型都应该在车道线数据集上进行训练,并获得一定的检测性能。
4.模型融合:将多个模型的检测结果进行融合,可以采用投票、加权平均等方法。
融合可以是像素级的融合,也可以是基于检测框的融合。
5.后处理:对融合结果进行后处理,如滤除不合理的检测框、
消除重叠等。
可以使用形态学操作、连通区域分析等技术来进行后处理。
6.高分辨率输出:将处理后的结果映射回原始图像的高分辨率,确保检测结果准确地定位在原始图像的对应位置。
7.评估和优化:使用标注的真实车道线数据对算法进行评估,
并根据评估结果进行优化,如调整模型参数、增加训练数据等。
这种基于模型集成的方法可以综合多个模型的优势,克服单模型的局限性,提高车道线检测的精度和稳定性。
同时,由于使用了高分辨率的融合处理,可以在图像中精确地检测和定位车道线,提供更准确和可靠的结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号: 1673‐9965(2013)10‐840‐05一种基于双曲线模型的车道线检测算法倡高 嵩,张博峰,陈超波,全 昱,田姗姗(西安工业大学电子信息工程学院,西安710021)摘 要: 针对目前车道线检测算法识别率不高、弯道检测不准确的问题,提出了一种基于双曲线模型的车道线检测算法.算法首先运用Canny算子对道路边缘进行检测;采用Hough变换提取道路边界点,并使用扩展的Kalman滤波进行预测跟踪来减小道路扫描范围;最后通过左右车道边界参数与双曲线模型参数进行匹配,利用最小二乘法来求解模型参数,完成车道边界重建.实验结果表明,该算法的准确率达到93.4%,每帧图像的处理速度为87.4ms,有效克服抛物线模型和直线模型在直道与弯道连接处不连续的问题,而且在车道线模糊、对比度较低的情况下也能快速准确的识别出车道线.关键词: 车道检测;双曲线模型;Hough变换;扩展卡尔曼滤波中图号: TN911.73 文献标志码: A 基于视觉的智能导航系统是计算机视觉的一个重要应用领域,而道路检测算法是基于视觉导航系统的关键技术之一.利用机器视觉识别公路上的车道线,实现自主导航是现阶段智能车辆常用的导航方法[1桘2].该方法简单实用,并能适应复杂道路环境的特点.现阶段对道路线检测的主要算法有基于特征和基于模型[3]两类.基于特征的算法主要是识别出道路的某些特征来对道路标线进行检测[4],如:颜色、纹理、道路形状等特征,但是光照变化[5]、水迹、阴影、道路标线的破损及不连续都将影响基于特征的道路线检测效果[6];基于模型的算法主是先建立道路参数模型,然后根据图像分析[7]确定模型参数,从而得到道路的全部信息,这类方法主要在于模型不同,如:直线模型、抛物线模型、样条曲线模型等[8桘10].目前有不少车道线检测算法有采用直线模型、抛物线模型、样条曲线模型.直线模型虽然实时性较好,但对曲线道路的识别精度较差;抛物线模型在车道直线与曲线连接处连续性不好,标识线容易偏离;样条曲线模型过于复杂,计算量大、实时性不高.为了解决以上问题,文中提出一种基于双曲线模型的车道线检测算法,减小了道路标线扫描范围来改善弯道识别率不高的问题.1 双曲线道路模型建立现阶段基于视觉的车道线检测,建立道路模型是大多学者常用的方法,文中采用车道线组合模型对车道线进行建模,近视场区域用直线模型u=bv-a远视场区域用双曲线模型u-uH=kv-l道路模型如图1所示,道路图像任意边界点(u,v),u代表横向坐标、v代表纵向坐标.我们对道路两边的标线同时建立双曲线模型u-uH=kv-h+b(v-h)(1)式中:h为道路平面在图像平面上的消失线的位置,其中k,b和uH为双曲线模型参数;k为道路标第33卷第10期2013年10月 西 安 工 业 大 学 学 报JournalofXi’anTechnologicalUniversity Vol.33No.10Oct.2013倡收稿日期:2013‐05‐21基金资助:陕西省教育厅专项科研计划项目(12JK0502);教育部留学回国人员科研计划项目(2011CY185);大学生创新创业训练计划项目(201210702061)作者简介:高 嵩(1966‐),男,西安工业大学教授,主要研究方向为智能控制.E桘mail:gaosong@xatu.edu.cn.线的曲率大小;b为道路标线的相对方向;uH为车道线到纵轴的距离.这些参数可以通过道路图像数据与摄像机的内外参数计算得到.如图1所示.图1 道路模型Fig.1 Roadmodel由于一边道路线可能被其他车辆遮挡,导致CCD摄像机无法采集到相应的图像信息,因此文中提出同时用一对双曲线模型,但前提是车道两边的标识线是平行且宽度相等的.因此可以用方程族对两边的道路线参数同时求解,左右两边的道路线方程为u-uH=kv-h+bl(v-h)(2)u-uH=kv-h+br(v-h)(3)由于道路两边的边线平行,所以参数k和b的值是相同的,参数uH的值不同.扩展后车道线模型方程为u-uH=kv-h+bl(v-h)+br(v-h)(4)对边界线上的每一个点,当b(l)=0时方程代表右边车道标线,当b(r)=0时方程代表左边车道标线.文中通过把两边曲线结合成一对双曲线,而曲线参数只增加了一个,在计算量增加不大的基础上,大大的提高了曲线模型的精确度和鲁棒性,特别是当道路线被遮挡或者部分被损坏时.2 道路检测算法2.1 车道线边缘像素提取首先文中对道路图像进行预处理,为了获得车道线边界,需要对图像进行边缘检测,而道路边缘检测是道路识别算法的前提.现有的边缘检测算子主要有Canny、Robert、Sobel、Prewitt、Laplacian等,其中Canny算子是一个具有滤波、增强和检测的多阶段的优化算子,提取边缘有较完整和较好的定位性能并且对于单个边缘点仅有一个响应,能检测出图像较细的边缘等优点.综合考虑算子的性能与速度特性,文中算法采用Canny算法进行边缘检测.从摄像机采集到的道路图像经过预处理后,通过Canny边缘检测算子处理,得到道路线边缘轮廓,并且检测结果能满足后续处理要求.图像预处理如图2所示.图2 图像预处理Fig.2 Imagepreprocessing2.2 车道线Hough提取常用的道路标识线提取的方法有基于Hough变换的方法和基于最小二乘法的方法.文中采用Hough变换对道路边界线进行提取,它的特点是精度高,提取准确,抗干扰能力强.首先用Hough变换初步获得车行道中线和消失线,然后用道路实时等宽的条件提取道路两边的边界线.Hough变换在极坐标下的参数方程ρ=xcosθ+ysinθ(5)式中:ρ为直线m离原点的法线距离,其大小ρ=x2+y2;θ为该法线与x轴的角度,θ的取值范围为-90°≤θ≤90°.图像空间中的一条直线经Hough变换映射到参数空间是一个点,图像空间中一个点映射到参数空间是一条正弦曲线.Hough148 第10期 高 嵩,等:一种基于双曲线模型的车道线检测算法变换车道线参数提取步骤如下:1)在ρ和θ适当的最大值、最小值之间建立一个离散的参数空间,及一个累加器A(ρ,θ),并把所有元素置0.2)根据先验知识(工程实际),在视频图像水平线不可能是车道线,所以文中将θ值大于70°的像素点都剔除掉,根据限定参数ρ和θ的取值范围,对二值图像上满足条件的像素点用Hough变换提取,即算出该点在每个ρ-θ网格上的对应曲线,并在相应的累加器上加1.3)找出对应图像平面上共线点的累加器的最大值,这个值提供了图像平面上共线点所在直线的参数.此方法是把在X桘Y平面上找共线点的问题转化成在参数空间里找最大、最小值的问题,一般认为峰值最多的点就是要找的道路线,如图3所示.图3 霍夫变换Fig.3 Houghtransform2.3 扩展的Kalman滤波预测跟踪上节Hough变换得到基于双曲线模型的车道线参数ρ和θ后,用扩展Kalman滤波进行跟踪.由于采集到连续车道线有所不同,所检测的车道线参数ρ和θ的维数也不同,要利用Kalman滤波进行跟踪,参数的维数必须统一.为此需要利用矩阵维数匹配判断.当前帧参数的维数Xr大于平均值Mr时,舍弃后边的Xr-Mr维,当前帧参数的维数Xr小于平均值Mr时,后边的Xr-Mr维补0,这样,任何一帧的待跟踪参数都是Mr维,就可以利用扩展的Kalman滤波进行跟踪了.扩展的Kalman跟踪计算是利用5个核心的公式来实时预测功能,参数初值和协方差P的初值设为单位阵,本状态的预测值是上一状态的跟踪结果,本状态的真实值是当前读入的序列帧,由此可得到本状态的跟踪值(即最优估计结果).此值又作为下一状态的预测值,实现车道参数的循环估计.一般由前3帧图像获得道路参数的均值作为预测的初值.用道路跟踪算法是为了减小下一环节道路线扫描的范围.2.4 双曲线模型匹配使用从中间到两边的道路边界扫描方法,把每一帧Hough变换提取出的道路两边的点分别聚集到一个集合,得到左右两边两个时间序列点,根据Hough变换提取出的道路线参数就可确定车道线在图像空间的消失点,进而得到改进的双曲线模型参数h.通过边界扫描得到道路左右道路线边界点Ll={(u1,v1),(u2,v2),…,(un,vn)}Lr={(u1,v1),(u2,v2),…,(um,vm)}然后用最小二乘法进行模型匹配A=1vl1-hvl1-h01…………1vln-hvln-h011vr1-h0vr1-h1…………1vrmh0vrm-h1珚X-[k,bl,br,uH]Tb=[u(l)1,u(l)2,…,u(l)n,u(r)1,u(r)2,…,u(r)m]求解矩阵方程A珚X=b计算出模型参数k,b的值,k=0表示直线道路、k>0表示前方道路左转、k<0表示前方道路右转,幅值表示左右车道线的弯曲程度;b的值表示车道线的行驶方向及左右车道线的相对位置.根据模型参数拟合实际车道线,使用Matlab仿真模型结果如图4~5所示.图4 车道线曲率数据仿真图Fig.4 Roadcurvaturesimulationfigure由仿真结果知双曲线模型参数k能实时向无人车系统提供前方道路的弯曲程度,并判断车体是左转还是右转,图4中前200帧图像车道线是直248 西安工业大学学报 第33卷线,而200帧到400帧车道线右转,400帧以后车道线开始左转.图5 车道线方向仿真图Fig.5 Roaddirectionsimulationfigure图5能实现实际车道线走向,而且左右两边的车道线保持实时等宽,这对模型匹配和车道线拟合有至关重要的作用.3 实验结果为了验证本算法的有效性和稳定性,用一段测试视频序列图对本文车道线检测算法进行仿真验证,实验中图像的大小为320×240像素的彩色图像,利用VC++和Matlab混合编程对图片进行处理,每帧图像的处理速度为87.4ms,准确度可以达到93.4%.为验证本算法的实时性和鲁棒性,我们对不同的路况进行了测试,部分道路车道线测试结果如图6~7所示.图6是对直线道路进行测试,其中6(a)~(c)图中道路的部分车道线被旁边车辆遮挡,但算法还是能匹配拟合出完整的标识线,图6(b)中两个车辆中间被车辆遮挡并存在阴影,但算法也准确的提取和拟合出车道线.图7是对有弯曲的道路进行测试,图7(a)~(d)中无论有车辆车档还是光照强度的影响算法都能准确的定位左右边界及弯道位置,特别是弯道处对虚线的识别,如图7(b)和7(c)中弯道处的虚线已经非常模糊了,但是算法还是能够准确的预测跟踪和识别出来.根据测试结果表明文中提出的车道线检测算法不仅有良好的稳定性,而且有较高的识别效果和较强的抗干扰能力.图6 直道检测结果Fig.6 Straight桘linetestresults图7 弯道检测结果Fig.7 Thecurvetestresults4 结论文中提出了一种基于双曲线模型的车道线检测算法,算法通过对道路线提取和双曲线模型匹配,并用最小二乘法对道路线进行重建.实验过程中选取直线、虚线及弯曲道路线,以及有阴影和车辆遮挡的道路进行实验检测,实验结果表明文中算法在直线道路和弯曲道路、含有阴影、道路有部分遮挡及光照变化的复杂环境下能准确、实时、可靠的识别车行道的边界线.参考文献:[1] OTHMANOK,IMRANMK,ABDULHAKAMAM,etal.Ahyperbola桘PairBasedLaneDetectionSystemforVehicleGuidance[C]//ProceedingsoftheWorldCongressonEngineeringComputerScience,SanFrancisco:IEEE,2010:20.348 第10期 高 嵩,等:一种基于双曲线模型的车道线检测算法[2] YUB,JAINAK.LaneBoundaryDetectionUsingaMultiresolutionHoughTransform[C]//ProceedingsofInternationalConferenceonImageProcessing,HongKong:IEEE,2010:748.[3] CHENGHY,JENGBS,TSENGPT.LaneDetectionwithMovingVehiclesintheTrafficScense[J].IEEETransactionsonIntelligentTransportationSystems,2006,7(4):571.[4] 高嵩,秦岭,陈超波.结构化道路车道线识别算法研究[J].西安工业大学学报,2013,33(1):14. GAOSong,QINLing,CHENChao桘bo.StructuredRoadLaneMarkingIdentificationAlgorithm[J].JournalofXi’anTechnologicalUniversity,2013,33(1):14.(inChinese)[5] LIQ,ZEHNGNN,CHENGH.SpringRobot:APrototypeAutonomousVehicleandItsAlgorithmsforLaneDetection[J].IEEETransactionsonIntelligentTransportationSystems,2004,5(4):300.[6] ABDULHAKAM,OTHMANOK,MDRI.RealTimeLaneDetectionforAutonmousVehicles[C]//ProceedingsoftheInternationalConferenceonComputerandCommunicationEngineering,KualaLumpur:IEEE,2008.13.[7] SHARMAUK,DAVISLS.RoadBoundaryDetectioninRangeImageryforanAutonomousRobot[J].IEEETransactionsonRoboticsandAutomation,2009,4(5):515.[8] 许华荣,王晓栋,方遒.基于B样条曲线模型的结构化道路检测算法[J].自动化学报,2011,33(3):23. XUHua桘rong,WANGXiao桘dong,FANGQiu.StructureRoadDetectionAlgorithmBasedonB桘splineCurveModel[J].ActaAutomaticaSinica,2011,33(3):23.(inChinese)[9] 王晓云,王永忠.基于线性双曲线模型的车道线检测算法[J].杭州电子科技大学学报,2010,30(6):1. WANGXiao桘yun,WANGYong桘zhong.ALaneDetectionAlgorithmBasedonLinear桘hyperbolaModel[J].JournalofHangzhouDianziUniversity,2010,30(6):1.(inChinese)[10] 林国余,陈旭,张为公.基于多信息融合优化的鲁棒性道路检测方法[J].东南大学学报,2010,40(4):19. LINGuo桘Yu,CHENXu,ZHANGWei桘gong.RoboustLaneDetectionAlgorithmBasedonMultipleInformationFusionandOptimization[J].JournalofSoutheastUniversity,2010,40(4):19.AnAlgorithmofLaneLineDetectionBasedonHyperbolaModelGAOSong,ZHANGBo桘feng,CHENChao桘bo,QUANYu,TIANShan桘shan(SchoolofElectronicInformationEngineering,Xi’anTechnologicalUniversity,Xi’an710021,China)Abstract: Forthelowrateofrecognitionandinaccuratedetectionofthecurve,analgorithmoflanelinedetectionbasedonhyperbolamodelhasbeenproposed.FirstthealgorithmusesCannyoperatortodetecttheedgeofthelane.ThentheHoughtransformisusedtoextractlaneboundarypoints.TheextendedKalmanfilter,withreducedroadscanningrange,isutilizedforpredictivetracking,whichisabletoimprovetheaccuraceofextraction.Atlast,theleftandrightlaneboundaryparametersfindaperfectmatchwiththehyperblamodelbytheleastsquaresmethod,andlaneboundaryreconstructioniscompleted.Experimentalresultsshowthattheaccuracyofthealgorithmreaches93.4%andtheprocessingspeedofeachimageis87.4ms.Thealgorithmcouldovercomeparabolicmodelanddiscontinuousproblematjointofstraightlineandcurve.Italsocouldquicklyandaccuratelyidentifylanelineinthesituationofblurandlowcontrastlaneline.Keywords: lanedetection;hyperblamodel;houghtransformation;extendedKalmanfilter(责任编辑、校对 魏明明)448 西安工业大学学报 第33卷一种基于双曲线模型的车道线检测算法作者:高嵩, 张博峰, 陈超波, 全昱, 田姗姗, GAO Song, ZHANG Bo-feng, CHEN Chao-bo, QUAN Yu, TIAN Shan-shan作者单位:西安工业大学电子信息工程学院,西安,710021刊名:西安工业大学学报英文刊名:Journal of Xi'an Technological University年,卷(期):2013(10)参考文献(10条)1.OTHMAN O K;IMRAN M K;ABDULHAKAM A M A hyperbola-Pair Based Lane Detection System for Vehicle Guidance 20102.YU B;JAIN A K Lane Boundary Detection Using a Multiresolution Hough Transform 20103.CHENG H Y;JENG B S;TSENG P T Lane Detection with Moving Vehicles in the Traffic Scense 2006(04)4.高嵩,秦玲,陈超波结构化道路车道标线识别算法研究[期刊论文]-西安工业大学学报 2013(1)5.LI Q;ZEHNG N N;CHENG H Spring Robot:A Prototype Autonomous Vehicle and Its Algorithms for Lane Detection 2004(04)6.ABDULHAK A M;OTHMAN O K;MD R I Real Time Lane Detection for Autonmous Vehicles 20087.SHARMA U K;DAVIS L S Road Boundary Detection in Range Imagery for an Autonomous Robot 2009(05)8.许华荣,王晓栋,方遒基于B样条曲线模型的结构化道路检测算法[期刊论文]-自动化学报 2011(3)9.王晓云,王永忠基于线性双曲线模型的车道线检测算法[期刊论文]-杭州电子科技大学学报 2010(6)10.林国余;陈旭;张为公基于多信息融合优化的鲁棒性道路检测方法 2010(04)引用本文格式:高嵩.张博峰.陈超波.全昱.田姗姗.GAO Song.ZHANG Bo-feng.CHEN Chao-bo.QUAN Yu.TIAN Shan-shan一种基于双曲线模型的车道线检测算法[期刊论文]-西安工业大学学报 2013(10)。