异步电动机谐波转矩分析_朱世林
交流鼠笼式异步电机谐波电磁场及温度场分析与研究
2006年用户年会论文交流鼠笼式异步电机谐波电磁场及温度场分析与研究刘志军[株洲电力机车厂城轨部][ 摘 要 ]: 本文叙述了利用ANSYS有限元分析软件的电磁场和温度场分析功能,对三相四极鼠笼式异步电机的空载励磁磁场和温度场进行分析和研究。
以考核通过经典计算方法设计的电机的可行性和精确性,并进一步优化电机设计。
1.前言在应用于交流传动的异步电机中,由于尺寸的限制和功率的要求,需要在电磁和发热的方面要求高效率的利用,而且对电机的性计算的精度日益要求提高。
而传统的分析计算方法因建立在磁场简化和实验修正经验参数的基础上,其计算精度就往往不能满足需求。
如果从场的理论入手,研究场的分布,再根据课题的要求进行计算,就有可能得到满意的结果。
因为电机设计的合理性、可靠性和经济性,无不与场的分布有关。
在这里,我们利用ANSYS有限元分析软件的强大分析功能,对三相四极鼠笼式异步电机进行二维空载磁场分析和定子二维温度场分析。
研究其分布状况,以验证电机设计的合理性,并进一步优化电机设计。
2空载磁场分析1电机基本情况四极鼠笼式异步电动机,采用短距双层绕组,电流经逆变器输出到牵引电机. 2基本假设采用二维场模拟电机中心横截面空载磁场分布;空载时转子导条中感应电流很小,近似为零;不计转子导条的集肤效应;定子电流含有谐波分量,这里主要考虑其基波分量。
不计定子线圈中的涡流效应;考虑到饱和,空载磁场为非线性正弦交变电磁场。
3数学模型及边界条件此电磁场随时间按正弦规律变化,其复数形式的麦克斯韦方程組为:忽略涡流效应,引入矢量磁位Az求解电磁场。
其泊松方程边值问题可描述为:2006年用户年会论文 在这里假定电动机周围不能够漏出磁通,转轴是不导磁的。
所以在定子外圈和转子内圈加磁力线平行边界条件,即Az=0。
4模型生成及求解为方便建模,我们首先在IDEAS环境下生成点和线模型,再通过ANSYS的IGES 接口将其转换为ANSYS模型,然后生成面,为更直观查看结果,在这里对整个截面建模。
一种抑制异步电动机变频调速系统中谐波电流影响的方法
维普资讯
3 4
上 海 第 - I业 大 学 学 报
20 0 2年 第 l 期
其 中 E为每 相转 子 绕组 的感 应 电势 ^、 分 别 为基 波 、5次 、7次谐波 电流 的幅值
、
分别 为基 波 、5次 、7次谐 波 电流 的相位 从上 式 可 知 ,基波 电流 产 生 的转矩 是一 个恒 定不变 的转矩 ,而 5次 、7次谐 波 产 生 的 转矩 为 6 倍基波频率的脉动转矩 , 它们的幅值分别为 2% 0 Z和 1.% 42 ,如此幅值 的脉动转矩 可 能会 引 起 电机 运 行不 平稳 ,为此通 常采 用下 面 两 种方 法 之一 来抑 制 谐 波 电流 的影 响 :
易。
1一 般抑 制谐 波 电流 影响 的原 理
采 用 晶 闸 管 电流 型变 频 调速 系统 的异 步 电动 机 定 子三 相绕 组 的 电流 为 矩形 波 ,每 一 相绕 组 的感 应 电势 是 正 弦波 。异步 电动 机 基波 、5次和 7次谐波 电流产 生 的转 矩可 以由傅 立 叶级 数 分解 计 算 得 到 1 。 :
次谐波 电流的有效值 ,它们是 【. 1 】 同样 可通 过 傅 立 叶分 解得 到 基 波 、5 次、7
: 15 .
^ : 8 %厶
厶 : 5 8% .
可 见 ,5次 、7次谐 波 电流 降低 得 很多 。值 得 注 意 的 是 ,虽 然这 两 台 并联 的 晶 闸管 逆交 器 的输 出 电压 是 相等 的 ,但 它 们 电流 相位 并不 相 同 , 因此 每 个瞬 间 它们 的输 出功 率 就 不 相 同, 为此 须 独 立 设 置两 套 整流 器 和 电流控 制 电路 ,这 样 就 使 得控 制 电路 变 得 复 杂 ,装 置成 本 也 相
谐波转矩对三相异步电动机的起动影响
谐波转矩对三相异步电动机的起动影响摘要本文主要讲述了异步电动机的高次空间谐波磁场产生的主要原因,以及高次谐波磁场产生的谐波转矩及其对起动的影响,并给出了削弱和消除附加谐波转矩的措施。
关键词谐波磁场;谐波转矩;高次空间谐波磁场;磁导齿谐;附加转矩;同步附加转矩异步电动机的气隙中除了存在基波磁场之外,还有一系列谐波磁场,这些谐波磁场对电机有多方面的影响,比如,产生附加损耗和谐波转矩,引起电机的振动和噪声等,本文主要讨论高次空间谐波磁场的产生及由此产生的谐波转矩,又称为附加转矩或寄生转矩,分析其对电机起动的影响及削弱其影响所采取的相应措施。
1 异步电机的高次空间谐波磁场产生的主要原因1.1 绕组分布非正弦引起的谐波磁场三相绕组对称分布流入三相对称电流,由于绕组磁动势为阶梯波,而非正弦波分布,因此,合成磁动势除有基波分量,还有一系列高次空间谐波磁动势。
其ν次谐波磁动势的振幅和转速表达式如下:谐波磁动势的振幅与谐波次数成反比与谐波的绕组因素成正比。
因此,次数较低的奇次谐波5次和7次谐波磁动势较强,而较高次谐波中2mqk±1次谐波也有较大磁动势,这是因为2mqk±1次谐波的绕组因数与基波绕组因数相同,比其它谐波的绕组因数大的多。
1.2 定、转子齿槽存在引起磁导齿谐波定子铁芯内圆和转子铁芯外圆各有齿槽存在,引起气隙磁导不均匀,面对齿部磁导较大,面对槽口磁导较小,在这种情况下,即使气隙磁动势按正弦分布,由于齿槽磁导变化也会引起谐波磁场,为与绕组谐波相区别,称由磁导变化引起的谐波为磁导齿谐波。
在分析磁导齿谐波时,为了简化通常假设定子内圆或转子外圆的表面仅其中一面存有齿槽,而另一面光滑,定子有齿槽,而转子表面光滑,且由定子齿槽引起的磁导变化,只考虑了一阶磁导波,可见在每对极基波极面下,磁导波变化了次,则气隙磁导波可以表示为可求得转子齿谐波磁场,其一阶齿谐波次数、极对数和转速为式中:“+”号表示相对于()方向旋转;“—”表示相对于()反方向旋转。
【doc】异步电机气隙谐波磁场的分解合成法
异步电机气隙谐波磁场的分解合成法④一玷第2l卷第3期1994年9月华北电力0mmIofNorthChiI学院Inst.0f目咖HWv01.2lNo3S曲t1994异步电机气隙谐波磁场的分解合成法王泽忠【华北电力车;,北京严烈通100~5)(清华大学.北京100084)△f摘妻经过详细分析异步电机定,转子碰动势.气晾磁导和气晾谐波磁场的关系.提出了计算气晾谐波磁场的分解音成法.这种方法是将定转子磁动势分解谐波,各戎谐波磁动势作用于有齿槽的气蹿磁导.产生一系列气晾磁场谐波,将这些谐波按其谐波次数.旋转方向及速度对应选加,从而音成气豫谐波磁场.采用有限元数值方法分捌计算定子,转子和气晾磁场,不仅考虑了齿槽效应而且考虑了不同饱和程度下的铁心磁阻及各扶谐波的电抠反应.从而使计算精度大为提高.奉方法用于计算一台w异步电机的气晾谐波磁场.所得结果与实测值基本柑符.说明本文方法符台工程要求.关键词:.堂/异步电机垄兰中图分类号:TM343TMI53.1引言,铽乞罐异步电机气瞎谐波磁场是产生谐波转矩和杂散损耗的主要原因.谐波磁场计算的精度直接影响杂散损耗和谐波转矩的分析.传统的谐波磁场计算方法对电机的齿槽效应,铁心饱和以及转子电流计算等方面做了过多简化,引起误差】.尤其是采用等值电路计算转子电流赧难求得准确结果.有些文献甚至不考虑转子对定子谐波磁动势的电枢反应日.实际上,转子高频谐波电流产生的磁动势抵消一部分定子谐波磁动势.这在较低次的相带谐波中尤为突出.传统方法中不考虑谐波磁动势作用于齿槽产生的其他次数的谐波磁场,这将造成一定的误差.为了克服上述误差,本文根据电机定,转子谐波磁场相互联系又有区别的特点,提出了基于定子,转子和气隙分别计算最后合成的气隙谐波磁场分解合成法.采用有限元法计算各部分磁场,精确地考虑了齿槽效应,铁心饱和效应以及转子电流分布和电枢反应.1气隙谐波磁场分析异步电机运行时,气隙中除基波旋转磁场外,还存在一系列谐波磁场.这些谐波磁场根据收稿日期:I9一02—2812华北电力学院994年其产生的原因不同,可分为定子相带谐波磁场,定子齿谐波磁场和转子齿谮帔磁场,见表1.裹1气豫谐波磁场关幕若将基波旋转磁场的谐波次数定为l,则气隙谐波磁场按其空间极数与基波极数关系,谐波次数如下:定子相带谐波次数定子齿谐波次数转子齿谐波次数l+6kk=l,2,3,±k,2,3…p±k车,2,3…p假定有次谐波磁势,则气隙中产生一系列谐波磁场:7对应于定子齿槽,谐波磁场次数"=v4-k三Lp7对应于转子齿槽,谐波磁场次数"=V4-kLp对应于平均气隙,谐波磁场次数"=vp为极对数.气隙磁场中各种谐波的来源不同,因此,其旋转速度也各不相同.假定相对于定子,基波磁场的旋转速度为n.,变化频率为,各种谐波磁场变化频率列于表2.第3期王泽忠等:异步电机气隙谐波磁场的分解合成法裹2谐波磁场的频率2气隙谐波磁场的分解合成法根据气隙谐波磁场的分析,由于定子有齿槽,v次谐波台成磁势不仅产生v次谐波气隙磁场,还产生与定子齿槽有关的一系列谐波磁场.换言之,气隙中次谐波磁场是由次谐波合成磁势和有关的v次谐波合成磁势作用于有齿槽的气隙而产生.求解转子高频磁场时,可以将定子齿槽的作用以等效的谐波磁势代替.这样可用定子内圆加电流层的方法求转子高频谐波磁场.其中,谐波电流层由=部分组成,一部分是定子谐波磁势的作用,另一部分是定子齿槽的等效作用.同理,求解定子高频谐波磁场时,也可将转子齿槽的作用以等效磁势代替.用分解合成法求解定子和转子的等效谐波磁势分两个步骤.第一步,将次谐波磁势作用于定子齿槽及气隙,算出气隙磁场波形,将气隙磁场波形分解,得到一系列次谐波磁密.第二步,根据所有磁势谐波产生的谐波磁密,按空间极数及旋转速度分别迭加合成气隙磁场,根据台成的气隙谐波磁场求出等效的谐波磁势.下面是分解合成法的具体步骤:2.1气隙基准磁场的计算假定定,转子无齿槽且磁阻为零,气隙一侧加旋转电流层:J=1e一_i一.计算气隙磁场.气隙均匀,沿气隙中线的变化规律为正弦.取的最大值作为气隙谐波磁场的基准值. 2.2定子铁心厦齿槽作用(1)改变气隙磁场波形求解区域为定子和气隙,定子槽内无绕组,转子外圆加旋转流层:J=le—,计算气隙和定子磁场,气隙中线上的的波形通过快速傅立叶变换(FF力分解出一系列次谐波以表示.(2)平均效应(气隙等效放大).由于铁心磁阻和齿槽作用,等效的平均气晾有所增大,放大系数:K9/.2.3定子磁势及电流层计算(1)传统的磁势计算公式=丁3i4.巫2,,/11V=W~'tV=嚏}专.惫14华北电力学院1994年(2)考虑定子槽口宽度计算方法将定子槽内电流均布于槽ICl,用傅立叶级数分解电流层得2.4转子皂枢反应求解区域为放大了的气隙及转子.在气隙的定子一侧加电流层工=le.转子槽内感应电流的频率=2【l-v(1-s)1.求解二维交变磁场,将气隙中线上A的实部分解谐波.由于转子电流的作用,气隙中线上磁位的幅值和相位(空间)均有变化.分解谐波得到A,和A.2.5定子边等效电流层根据不同磁势产生同次谐波磁场可以迭加的原则,将同一次谐波的A迭加合成. +(v,.孚脚,尚定子边等效电流层#=v4-睁去2.6转子边等效电流层由转子基波(滑差频率)电流产生的阶梯谐波磁势和转子齿槽作用引起的气隙磁势谐波A24.,±睁,转子边等效电流层=/A通过气隙谐波磁场的分解与合成,求出了定,转子两边的等效谐波电流层.这样就把相互关联的定转子谐波磁场区分开来.利用定子边的等效电流层,计算转子的高频磁场,利用转子边的等效电流层,计算定子的高频磁场.3计算结果与分析为了验证分解合成法计算气隙谐波磁场的精度,作为实例,对一台7.5kw鼠笼异步电机的谐波磁场进行了计算和测量,结果如下:3.1分解合成法计算结果I■第3期王泽忠等:异步电机气隙谐波磁场的分解合成法裹3来宣定于的气粮谐波磁场表4来自转子的气脒谐波磁场3l2实验验证表5反转时气粮磁场主要谐波计算误差T计算与实测比较表明,分解合成法计算异步电机气隙谐波磁场结果与实测值基本相符,精度满足工程要求.对比计算表明,考虑槽口宽度对较低次谐波影响不大,但对齿谐波有一定影响,如果定子16华北电力学院1994年为开口槽,则影响更大.定子齿槽对相带谐波幅值有一定影响,而传统方法不考虑这种影响,将造成一定误差.从各次谐波的转子电枢反应看,对于较低次的谐波,显然不能忽略转子电枢反应.传统方法不考虑转子电抠反应计算气隙谐波磁场有较大误差.分解合成法除采用有限元法提高磁场的计算精度外,在槽口的电流展处理,齿槽对相带谐波影响和转子电枢反应等方面比传统方法均有明显改进.参考文献1海勒尔B,哈马塔V,章名涛,俞鑫昌译.异步电机谐波磁场的作用.机械工业出版牡,19802(7,mlmmBJ.EmagrproblemsofACmachines,Londoa.Chapman&Hall,196:53冻丕璋,严烈通,排若萍.电机电磁场理论与计算.科学出版牡,19864王泽忠.异步电机杂散损耗分析计算,【学位论文】.北京:清华大学.1989,3卫印BRESOL皿ONANDCOMPOSmONMETHODFORCIALCUL^1]GHARMONICFIELDSOFINDI『CⅡONMoT0RS WangZezhongY ahLietong(Dept.ofPostgraduate,NCIEP,B耐ing07IOO3)inghuaUaiv,~jing1oo084)Airstme(1广hemagneticharmonic矗eIdsininductionmotorsarecalculatedbyu!;eofthe methodnamelyIesoludonandcompositionmethod.Thjsmethodconsistsofthe娲0lution ofraagnetomotiveforce(oarrentlar),theharmonicnddcalculationundercacJ'/m.m.f andthecompositionofharmonicfrddswiththesaI'g~order,sarrlerotatingvelocityandsaii~rotatingdirection.Ia2一Dmagnetic6eIdana,thcreluctanceofstatorandrototcoreand er龃onofcachharmonicsarewe11∞I1siderect. KeyWards:magneticharmonicfields;inductionmotors。
考虑开槽和饱和时鼠笼异步电动机谐波的解析计算
1
考虑开槽和饱和时的气隙磁导系数
由于异步电机的气隙较小, 定转子铁心的开槽
会引起较强的磁通密度谐波 , 铁心饱和亦会引起饱 和磁通密度谐波, 对开槽和饱和的影响主要是通过
收稿日期 : 2010 06 18
引起异步电机电磁噪声的主要原因是气隙磁场 产生的电磁力波 , 故降低电磁噪声首先需要准确地
作者简介 : 王荀 ( 1975
为气 隙长
度; as a, k sa ( k sa = 0 , 1, 2, ∀) 为各次谐波幅值系数, 其 气隙磁导系数的求解利用经典的重叠法 ! ( , t) ! ( ! 0)
-2 [ 5 6]
,即 ( 3)
! st ( ) ! rt ( , t) ! s a( , t ) ,
其中 : ! s t ( ) 为转子表面光滑、 考虑定子开槽时的气 隙磁导系数, ! rt ( , t ) 为定子表面光滑、 考虑转子开 槽时的气隙磁导系数。 考虑定转子均开槽和铁心饱和时 , 异步电机的
) , 男 ( 汉 ) , 山东 , 博士研究生。
通信作者 : 邱阿瑞 , 教授 , E mail: qiuar@ mail . t singhua. edu . cn
378
清 华 大 学 学 报 ( 自 然 科 学 版)
2011, 51( 3)
气隙磁导系数中包含它们引起的谐波来处理。 磁导分析法是将磁路中引起磁压降的磁阻均归 结到气隙中而形成气隙磁导系数。定转子开槽会引 起磁导系数谐 波, 求解 方法在文 [ 5 6] 中有详细 推 导。由于铁心饱和引起铁磁材料中磁导的变化可通 过饱和磁导系数谐波来考虑。尽管齿部和轭部均可 能会饱和 , 以下只叙述齿饱和时气隙磁导系数的求 解, 轭部饱和时可参阅文 [ 11] 。由于齿中的磁通密 度和气隙磁通密度几乎成正比 , 因此位于磁通密度 基波最大幅值附近的齿饱和程度最大, 即这些饱和 齿的磁阻加大, 导致气隙磁通密度趋向平顶。若将 齿中的磁阻归算到气隙中可形成等效气隙, 它沿圆 周方向周期性变化, 如图 1 中 ( ) 所示。饱和引起 的等效气隙随磁通密度基波同步旋转, 只考虑光滑 气隙和饱和影响时异步电机的等效气隙表达式为
异步电动机直接转矩控制的MATLAB仿真研究
1 绪论
1.1 交流调速系统的主要类型
交流电机主要分为异步电机(即感应电机)和同步电机两大类,每类电机又有不同 类型的调速系统。 按电动机的调速方法分类常见的交流调速方法有: (1)降电压调速; (2)转差离合器调速; (3)转子串电阻调速; (4)绕线电机串级调速或双馈电机调速; (5)变极对数调速; (6)变压变频调速等等。 在研究开发阶段,人们从多方面探索调速的途径,因而种类繁多是很自然的。现在 交流调速的发展已经比较成熟,为了深入掌握其基本原理,就不能满足于这种表面上的 罗列,而要进一步探讨其本质,认识交流调速的基本规律。 电动机的能量转换类型 按照交流异步电机的原理,从定子传入转子的电磁功率可分成两部分:一部分是拖 动负载的有效功率,称作机械功率;另一部分是传输给转子电路的转差功率,与转差率 s 成正比。他们的公式关系见公式(1-1) 、 (1-2) 、 (1-3) 。 Pm = Pmech + Ps Pmech = (1 –s) Pm Ps = sPm
异步电动机的定子磁链模型 ………………………………………………………… 19 3.1 定子磁链模型 ………………………………………………………………… 3.2 转矩调节器与磁链调节器 …………………………………………………… 3.2.1 转矩调节器 …………………………………………………………… 3.2.2 磁链调节器 …………………………………………………………… 17 18 19 19
第 1 页 共 33 页
异步电动机直接转矩控制 MATLAB 仿真研究
时) 。可是这类系统结构简单,设备成本最低,所以还有一定的应用价值。 ② 转差功率馈送型调速系统 在这类系统中, 除转子铜损外, 大部分转差功率在转子侧通过变流装置馈出或馈入, 转速越低,能馈送的功率越多,上述第(4)种调速方法属于这一类。无论是馈出还是 馈入的转差功率,扣除变流装置本身的损耗后,最终都转化成有用的功率,因此这类系 统的效率较高,但要增加一些设备。 ③ 转差功率不变型调速系统 在这类系统中,转差功率只有转子铜损,而且无论转速高低,转差功率基本不变, 因此效率更高,上述的第(5) 、 (6)两种调速方法属于此类。其中变极对数调速是有级 的, 应用场合有限。 只有变压变频调速应用最广, 可以构成高动态性能的交流调速系统, 取代直流调速;但在定子电路中须配备与电动机容量相当的变压变频器,相比之下,设 备成本最高[1]。
逆变器死区时间对异步电机转矩脉动影响及削弱办法
收稿日期:2002-08-12作者简介:孙昌志(1938-),男,辽宁盖州人,沈阳工业大学教授,博士生导师.电气工程文章编号:1000-1646(2003)01-0032-04逆变器死区时间对异步电机转矩脉动影响及削弱办法孙昌志,李红梅,陈治飞(沈阳工业大学电气工程学院,辽宁沈阳110023)摘 要:建立了考虑逆变器死区时间的异步电动机系统整体数学模型,研究逆变器死区时间对系统转矩脉动的影响。
在分析常用死区补偿法的基础上,采用脉冲为基础的死区时间补偿法对死区进行补偿,可以有效达到削弱转矩脉动,改善异步电动机系统运行质量的目的.关 键 词:逆变器;死区时间;异步电动机;转矩脉动;死区补偿中图分类号:TM 34312 文献标识码:A 随着电力电子技术、大规模集成电路和微机技术的发展,现代控制理论的引入,各种静止式变压变频装置(VVV F )得到迅速的发展,且价格逐渐降低,使异步电动机变频调速系统的应用与日俱增[1].其中尤以SPWM 逆变器控制的异步电动机运行于V /f 为常数的变频调速系统最为常见,国内外现今使用的大多数变速驱动都是这种类型[2].该系统在变频调速运行中常伴随有电机运行的转矩脉动质量问题[3~5].逆变器死区时间的引入使逆变器的输出产生死区效应,输出电压与期望电压产生偏差,引起基波电压的降低,并且使输出电压中产生谐波,影响系统运行的质量和可靠性.为了研究逆变器死区时间对异步电动机变频调速系统转矩脉动的影响,本文首先建立了考虑逆变器死区时间的异步电动机系统整体数学模型,研究死区时间的存在对系统转矩脉动影响,提出采用以软件实现为主的PBD TC 法补偿死区时间,提高系统的运行质量和可靠性.1 计及死区时间的逆变器模型理想情况下,PWM 逆变器同一桥臂的上下两个功率开关总是互补地导通和关断,但是功率管的导通和关断需要一定的时间,尤其是关断时间比导通时间长.因此,实际上总使上、下开关管的导通和关断错开一定的时间,为了保证逆变电路的安全工作,必须在同一桥臂上、下两个开关器件的通断信号间设置一段死区时间t d ,以防止上下两器件同时导通、逆变器直流侧被短路的事故.死区时间的存在使得逆变器实际输出电压V a 变成不同于精确电压V ao ,偏差电压V a ε=V a -V ao 具有高度恒定、等于直流侧源电压U D 、脉冲宽度为t d 、脉冲极性取决于电机相电流I as 极性的特点.偏差电压发生在V ao 每两次转换的瞬间,如果I as 为正,在V ao 上升瞬间出现脉冲,如果I as 为负,在V ao 下降瞬间出现脉冲.由于V ao (ω1t )=U D S 1(ω1t ),在V ao 每次转换的瞬间,插入死区时间t d ,得到宽度为t d ,高度为U D 偏差电压V a ε,其正负由I as 极性决定,逆变器实际输出电压V a =V ao -V a ε.模拟得出逆变器输出频率f 1=50Hz ,载波频率f c =900Hz ,a 相电压和偏差电压波形见图1,同理可获得b 、c 相偏差电压V b ε、V c ε.逆变器实际输出线电压为V ′ab (ω1t )=V a (ω1t )-V b (ω1t )V ′bc (ω1t )=V b (ω1t )-V c (ω1t )V ′ca (ω1t )=V c (ω1t )-V a (ω1t )计及逆变器死区时间后,异步电动机电压矩阵V 的表达式如下V =Vq 1V d 1V q 2V d 2=13(V ′ab -V ′ca) -33V ′bc 0 0第25卷第1期2003年2月沈 阳 工 业 大 学 学 报Journal of Shenyang University of TechnologyVol 125No 11Feb.2003图1 逆变器电压和偏差电压Fig.1 Voltage of inverter and biased error voltage 将上式与计及主磁路饱和时的异步电动机数学模型相结合,即是计及死区时间的逆变器-异步电机系统非线性数学模型.2 逆变器死区时间对系统转矩脉动的影响 所研究的样机是额定功率11k W、4极笼型异步电动机.有关的数据如下:r1=012687Ω,r2=012294Ω,L1σ=117316×10-3H,L2σ=31059×10-3H,J=01125kg・m2.逆变器输出频率f=50Hz,逆变器直流侧电压, U D=513V死区时间t d=20μs. 图2、图3分别对应理想逆变器供电、计及死区时间时的逆变器供电系统稳态时序图.比较两图可知:逆变器死区时间的存在导致电机转速波动加大,转矩脉动显著增加.增大逆变器死区时间,t d=40μs时的系统稳态时序图见图4,电机转速波动进一步加大,转矩脉动较t d=20μs时再度增加.3 常用死区补偿方法[6,7]311 电流反馈型电流反馈型死区补偿法,通过检测变频器的三相输出电流的极性来确定补偿电压,该法由于受死区时间及电流幅值和频率的影响,电流过零点一般存在一定程度的模糊性,因而电流极性的检测精度收到一定的影响,同时必要的电流滤波环节也加剧了对电流极性实时检测的难度,尤其用软件实现时,严重的检测滞后会破坏对死区时间的正确补偿.图2 未计及逆变器死区时间时的系统稳态时序图Fig.2 System stable state time-sequence figures without considering dead time ofinverter图3 计及逆变器死区时间时的系统稳态时序图Fig.3 System stable state time-sequence figures with dead time of inverter considered33第1期孙昌志等:逆变器死区时间对异步电机转矩脉动影响及削弱办法 图4 死区时间增大时的系统稳态时序图Fig.4 System stable state time-sequence figures by increasing the dead time312 电压反馈型电压反馈型死区补偿法,是将各相的PWM 输出检测出来,同给定的PWM波进行比较,得到实际偏差电压,然后将偏差电压同给定的PWM 波叠加,得到新的给定.这种方法同样具有补偿的滞后性,每次比较结果必须在下一个开关周期才能得到校正,同时存在输出的PWM高精度检测问题,实现起来较复杂.4 脉冲死区补偿法相电流大于零时,由于死区时间引起的死区效应使实际脉冲上升沿滞后理想脉冲上升沿t d 时间,采用PBD TC死区补偿法[8],在超前理想脉冲上升沿t d时间,加入PBD TC死区补偿后的实际脉冲上升沿.当把PBD TC死区补偿后的脉冲加到开关器件的控制极上,计及逆变器死区时间后,校正后的脉冲与理想脉冲一致(见图5). 相电流小于零时,由于死区时间引起的死区效应使实际脉冲下降沿滞后理想脉冲下降沿t d 时间,采用PBD TC死区补偿法,是在超前理想脉冲下降沿t d时间,加入PBD TC死区补偿后的实际脉冲下降沿.当把PBD TC死区补偿后的脉冲加到开关器件的控制极上,计及逆变器死区时间后,校正后的脉冲与理想脉冲一致(见图6). 这种方法补偿效果良好,与系统运行频率、载波频率、负载无关,只需检测相电流的极性,以软件实现为主,实现简单,系统成本增加不多.图5 相电流大于零时PBDTC法校正原理Fig.5 PBDTC modification principle when phase-current is more thanzero图6 相电流小于零时PBDTC法校正原理Fig.6 PBDTC modification principle when phase-current is less than zero5 结 论逆变器死区时间的引入使异步电动机系统的转矩脉动加大,随逆变器死区时间的增加,转矩脉动程度加剧.在探讨常用逆变器死区时间补偿法的基础上,采用PBD TC法补偿死区时间,该方法以软件实现为主,简单易行,系统成本低,能够有效削弱逆变器死区时间对系统转矩脉动的影响,可达到改善系统运行质量的目的.参考文献:[1]陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社.1998.(Chen B S,Chen M X.Alternate current ad justing speed system[M].Beijing:China Machine Press, 1998.)[2]Munoz2G arcia A,Thomas A.Lipo et al.A new induc2tion motor v/f control method capable of high2perfor243 沈 阳 工 业 大 学 学 报第25卷mance regulation at low speeds [J ].IEEE Trans.on Ind.Appl.,1998(4):813-821.[3]李红梅,李忠杰,杜世俊.SVPWM 逆变器供电异步电机动态性能仿真.电机与控制学报.2001(3):145-148.(Li H M ,Li Z J ,Du S J ,Dynamic performance simu 2lation of Asynchronous motor supplied by SVPWM in 2verter[J ].Electric Machine and Control Journal ,2001(3):145-148.)[4]李红梅,李忠杰.M TPWM 逆变器供电异步电动机动态性能的仿真研究.中小型电机,2001(4):1-4.(Li H M ,Li Z J.Dynamic performance simulation of asynchronous motor supplied by M TPWM inverter [J ].Medium 2small Electric Machines ,2001(4):1-4.)[5]Taniguchi K.A PWM strategy for reducing torque 2rip 2ple in inverter 2fed induction motor[J ].IEEE Trans.on Ind.Appl.,1994(1):71-77.[6]陈硕,薛昭武.电压型PWM 逆变器输出误差分析及其补偿.电工技术学报,2001(2):51-55.(Chen S ,Xue Z W.Output error analysis and compen 2sation strategy of voltage 2PWM inverter [J ].Transac 2tions of China Electrotechnical S ociety ,2001(2):51-55.)[7]Sukegawa T.Fully digital ,vector 2controlled PWMVSI 2fed AC drives with an inverter dead 2time compen 2sation strategy[J ].IEEE Trans.on Ind.Appl.,1991(3):552-559.[8]Leggate D.Pulse 2based dead 2time compensator forPWM voltage inverters [J ].IEEE Trans.on Ind.Elec.,1997(2):191-197.E ffect of dead time of inverter on inductionmachine and w eakening measureSUN Chang 2zhi ,L I Hong 2mei ,CHEN Zhi 2fei(School of Electrical Engineering ,Shenyang University of Technology ,Shenyang 110023,China )Abstract :The integrated mathematical model of the induction motor system with the consideration of dead time of inverter is set up and the effect of the dead time of inverter on the torque pulsation of system is stud 2ied.On the basis of summarizing common dead time compensation ,dead time compensation (PBD TC )method based on the pulse is proposed to compensate the dead time in order to weaken the torque pulsation and improve the running quality of the induction system.K ey w ords :inverter ;dead 2time ;induction motor ;torque pulsation ;dead 2time compensation(上接第31页)[18]柳百成,荆涛.铸造工程的模拟仿真与质量控制[M ].北京:机械工业出版社,2000.(Liu B C ,Jing T.Simulation and quality 2controlling of foundry process [M ].Beijing :China Machine Press.2000.)[19]Kurz M ,G iovanola B ,Trivedi R.Theory of microstruc 2tural development during rapid solidification [J ].Acta Metall.1986,34(6):823-830.Development of microstructure simulation of solidif ication structureYAN G Xiu 2ying ,Li Chen 2xi ,L I Run 2xia(School of Material Science and Engineering ,Shengyang University of Technology ,Shenyang 110023,China )Abstract :The paper has summarized the development of micrstructure simulation in solidification process.The developing process of deterministic ,stochastic and phase 2field method have been introduced.The devel 2opment of numerical simulation in eutectic and dendrite alloy ’s solidification structure has been discussed.Finally ,the trend for numerical simulation of solidification structure in the future has been predicted.K ey w ords :solidif ication structure ;numerical simulation ;revie w53第1期孙昌志等:逆变器死区时间对异步电机转矩脉动影响及削弱办法 。
一种永磁同步电机气隙谐波转矩补偿方法

一种永磁同步电机气隙谐波转矩补偿方法武四辈【摘要】电动汽车用永磁同步电机由于设计、制造等导致气隙磁场产生畸变,使得电机电流波形带有谐波,最终导致转矩产生波动.提出了一种谐波转矩补偿方法,在电机电流双闭环控制基础上,通过在电压上补偿一定的谐波,达到抑制电流和转矩波动的效果.仿真结果表明,该方法可以有效地提高电流的补偿效果,并明显改善转矩波动.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)009【总页数】4页(P66-69)【关键词】永磁同步电机;气隙磁场;谐波转矩补偿【作者】武四辈【作者单位】上海汽车集团股份有限公司技术中心,上海201804【正文语种】中文【中图分类】TM351永磁同步电机具有高效率、高功率密度等优点,已经逐渐被广泛应用于机床、电动汽车、风力发电等领域[1-2]。
但由于转子磁极结构、磁路饱和效应等使得电机的气隙磁场带有不同程度的谐波,这些谐波会导致电流波形畸变,从而使得电机的转矩产生波动,增加电机的振动和噪声,这样就有必要对谐波进行抑制。
国内外一些学者从电机设计的角度对永磁体磁场进行了研究,利用有限元等方法来分析永磁体磁场,并提出了一些改进方法来削弱谐波分量[3]。
但这些方法很难从设计角度使得励磁磁场正弦分布,且增加了成本,因此目前阶段从电机控制的角度采取措施来消除或减弱磁场谐波的影响显得更有意义。
文献[4-7]从电机控制的角度对补偿方法进行了研究,但存在着实际工程应用困难、算法复杂的问题。
本文提出了一种工程上简单、易于实现且有效的谐波转矩补偿方法。
首先对所研究电机进行了电机转子磁场谐波测量,根据测量结果建立含有谐波的电机模型,并对模型进行谐波补偿。
对补偿后的波形进行分析可知,气隙谐波导致的电流波形畸变和转矩波动都得到了改善。
理想模型认为转子磁场在气隙中为理想的正弦分布;但实际上由于电机永磁体制造及工艺上的限制,永磁体产生的转子磁场谐波含量很大,实际转子磁场不是理想正弦分布的。
异步电动机软起动器产生的谐波对起动特性的影响研究
分析了其对电动机起动特性的影响。提出了电子式软起 动器在应用中应注意的问题。 中图分类号 : T M 343
大型异步电动机如果直接起动 , 过大的起动电流将产生不良后果。首先, 在供电变压器相对容量较 小, 输电线路又较长的情况下, 过大的启动电流将造成较大的电压降 , 从而影响接在同一电网上的其它 电器设备的正常运行 , 严重时还可能导致越级跳闸 , 造成大面积停电。其次 , 对于电动机本身而言 , 过大 的起动电流会使电机内部发热过多加速老化。为了改善异步电动机的起动特性 , 目前研制的电子式软 起动器 , 大多采用单片机控制的晶闸管三相调压技术 一个不容忽视的问题。
16
东北电力学院学报
第 23 卷
即A、 B、 C 三相电路中正向晶闸管的触发信号互差 120 同一相中反并联的两个晶闸管触发信号相位互 差 180 。即 V 1 、 V 2、 V 3、 V 4、 V 5、 V 6 依次相差 60 触发。 由于是感性负载 , 设负载阻抗角为 > , 所以电流滞后电压 角。 所以只有使晶闸管的触发控制角 > 150 , UA < UB , < < 150 。 的范围是 才能达到调压的目的 , 且假设同步电压信号取自 A 相电压过零时刻, 则当
第2期
任先文 , 等: 异步电动机软起动器产生的谐波对起动特性的影响研究
19
- cos
( n + 1) 5( n + 1) 2( n + 1 ) - cos + cos 6 6 3 +
1 2 5( n + 1) 2 + 1 - cos + cos n+ 1 3 6 3 2 U0 2 - cos cos 2( n + 1 ) 2 ( n + 1) 2 + cos种情况下电路中的谐波情况 , 图 2 和图 3 分别是在 设电源电压为: UA ( t ) =
联合仿真下谐波转矩对高速列车的动力学分析
联合仿真下谐波转矩对高速列车的动力学分析陈哲明;王理章;喻洋【摘要】牵引电机的谐波转矩是高速列车重要的外部激励来源,为了对异步电机谐波转矩在高速列车动力学特性中的影响进行分析,建立某高速列车的多体动力学模型,根据矢量控制理论对异步电机仿真模型进行搭建,通过联合仿真分析牵引电机谐波转矩在动力学方面对高速列车的影响.仿真结果表明:在高速工况下,异步电机谐波转矩使得车身横向加速度最大峰值增大约30%,车身垂向加速度最大峰值增大约25.8%.在纵向上车身与电机的纵向加速度最大峰值则与不考虑谐波情况的加速度幅值最大值相比增大了数倍.因此建议在对高速列车进行动力学分析时,将电机的谐波转矩考虑进去更符合列车的实际运行状态.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)003【总页数】4页(P124-126,130)【关键词】高速车辆;异步牵引电机;谐波转矩;动力学【作者】陈哲明;王理章;喻洋【作者单位】重庆理工大学车辆工程学院,重庆400054;重庆理工大学车辆工程学院,重庆400054;重庆理工大学车辆工程学院,重庆400054【正文语种】中文【中图分类】TH16高速列车上的大功率异步电机在工作的时候,除了含有异步电机驱动所需的基波分量,还含有很多频率与振幅不一样的谐波磁通与谐波电流[1-3]。
这些磁通和电流产生的振动谐波转矩会造成电机的转矩出现脉动,严重情况下会使得电机运行不稳定,是不可忽视的激励源。
国内外也分别对异步电机的谐波转矩特性及高速列车的车辆系统动力学特性进行了大量研究,并证明了谐波转矩对机车动力学的影响[4-5]。
但传统数学建模方法并不能完全反映谐波转矩对实际整车行驶动态特性的影响。
近年来,随着多体动力学理论以及相关通过虚拟样机建模仿真技术的发展兴盛,运用相关技术对车辆多体系统动力学进行分析已经被证明其有效性和准确性。
通过建立某型高速列车的多体动力学模型,对异步电机控制系统的仿真模型进行搭建,并通过联合仿真,对谐波转矩在高速列车运行中对其动力学特性产生的影响进行分析。
变频调速异步电机的谐波分析
唾 t
I lo ( 9 一 m s 叫 + ) c
c s + ) o(
() 4
式 中 , 为 电流 幅 值 , I J为 电 流有 效 值 , 为 角
= 睾
=
ca ) ( 警 ㈣ o一 呈 ) s ( 一 ca ) st ) o一 呈 p一 s等 ( (等 w
刘万太 ,彭 晓。 ,谢 卫才。 ,李永 坚。
( . 南 工 业 大学 电 气 信 息 工 程 学 院 , 洲 42 0 ;2 湖 南 工 程 学 院 电 气 信 息 学 院 , 潭 4 1 0 ) 1湖 株 108 . 湘 1 1 1
摘 要 :分析 了异 步 电机 在 变频 电源驱动 下的 谐 波产 生基 理及 对 电机 运 行 性 能 的影 响. 立 了 变频 调 建
成, 然后 再把单 相磁 势合成 为三 相磁 势. 于空 间基 对 波 , B、 A、 C三 相 电 流相 位 互 差 1 0 , 时在 空 间分 2。同 布 上也互 差 1 0 , 以得 到 三相 合 成 后 的基 波 脉 振 2 。可
COS
伽 一 叫 ) ∑ F o ( a I t , 1 7, 3 9 2 , , k 1 … + c s v -  ̄ ) 一 , 1 , , 5 … 6 + , -
第 2 卷 第 3期 1
21 0 1年 9 月
湖 南 工 程
学 院 学 报
Vo . 1 No 3 1 2 . .
S p. 0 1 e t2 1
J u n lo n n I siu eo gn e i g o r a fHu a n tt t fEn i e rn
变 频 调 速 异 步 电机 的 谐 波 分 析
{ 童 c ( ) ] ㈣ o 一警 s [ +
双馈异步发电机谐波磁场削弱方法的研究
.
. &
/
\ h
i in y o eg n r t r d d c e s tl y r to o e fce c f h e e ao n e r a et eu i t ai f h t a h i t wi d p we . s d o h t d f a m o i u , n e f c n o r Ba e n t esu y o r n c f x a fe — h l
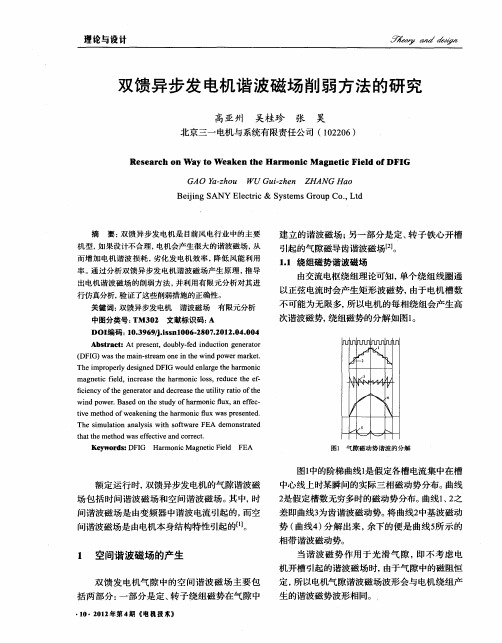
电机开槽后, 气隙磁阻会发生周期性变化 , 当绕组 基波及谐波磁势 作用于周期性变化 的磁 阻上时, 会产生磁导齿谐波磁场, 如图2 。
当忽略其中次要成分时, 可以得出电机额定 运行 时的气隙基波磁场磁密值 :
F o
1 一
A ≈B o 6
() 2
定 子绕 组 谐波 磁 密为 :
磁导;
在不 考虑转 子侧变 频电源谐波 的影响下,
DF G气 隙谐 波磁 场 可 以按 磁 势 乘 磁导 的 方 法进 I
行计算[, 引 如式1 :
b( , ) ( , ) 0 t = 0t t ( , )
{oO1 【c一 o∞t ∑薹l+ 凡s z ) Az2 f (一 v
Z 定子槽数。 —— 式 () 3 和式 ( ) 4 中各个磁导的计算公式 为: l f 0 () 8 。
.
机 在采取 改善 措施前后的气隙磁场 进行 了仿真
分析对比, 验证 了谐波削弱措施的有效性。 电机 部分数据如表 1 该 电机采取具体的改善 措施 如 ,
表 2 。
11 —
S n ・- -— — l -- -- —- —・ -- -— -
AIA ( 1 ) = O Kc 1 .
交流电机定子绕组内的磁动势谐波和反电动势谐波概述
交流电机定子绕组内的磁动势谐波和反电动势谐波概述摘要:综合分析了交流电机定子绕组内的磁动势谐波和反电动势谐波这两类谐波的原理和性质。
从谐波转矩、谐波漏抗和谐波损耗三个方面分析了谐波对交流电机性能的影响,阐述了谐波的抑制及用途。
关键词:谐波;磁动势;分数槽;电动势;齿谐波0.引言交流电机中的谐波与电机的损耗、噪声、转矩、绕组电抗等密切相关[1-5]。
现有的文章多数仅专注于某一种特定谐波,而对交流电机定子绕组内谐波的综合概述还比较少。
本文综合考虑交流电机定子绕组内的磁动势谐波和反电动势谐波,对这两种谐波的产生机理、特性,以及对电机的影响等方面进行了分析和总结,并讨论了谐波的危害和谐波的一些有利的用途。
1.定子绕组磁动势谐波1.1 磁动势谐波的成因磁动势谐波是一种空间上的谐波,由于每相绕组都是由有限个产生方波的绕组线圈去逼近正弦分布,电机中不可避免地产生磁动势谐波。
整数槽绕组基波磁动势的极对数与电机的极对数相等,谐波磁动势的极对数则为基波极对数的整数倍。
分数槽绕组更复杂,绕组的特殊结构造成极数不明显,使绕组中明显包含多种极对数的谐波。
分数槽绕组磁动势中与电机转子极对数相同的谐波成分称为“基波”;多于转子极对数的谐波称为“高次谐波”;少于转子极对数的谐波称为“次谐波”;多于转子极对数但又不能被它整除的谐波叫做“分数次谐波”。
1.2磁动势谐波的性质定子绕组中的基波电流和谐波电流都会产生谐波磁动势,为得到普遍的多相绕组谐波合成磁动势表达式,需对文献[1]中通入正弦电流的三相绕组合成磁动势的公式加以修改。
2.定子绕组反电动势谐波2.1 反电动势谐波的成因反电动势谐波通常有两个成因:一方面,即使电机的气隙磁导均匀,气隙磁动势中的谐波成分仍会产生磁密谐波,感生出谐波电动势;另一方面,电机开有齿槽,导致磁导不均匀,磁动势与不均匀磁导作用,感应出齿谐波电动势。
2.2 反电动势谐波的性质γ次转子磁动势谐波感应出的谐波电动势的电角频率是γω;而无论的取值是多少,定子绕组次谐波磁动势感应出的谐波电动势的电角频率都为。
大型异步电动机起动引起电网暂态过程中的高次谐波分析
• 90•计,以及课后测验。
课堂中,使用“blackboard ”软件系统进行授课,边学边做,学生学习热情高,学生问题能够及时解决。
采用线上编程平台“python123”与Anaconda 编程环境结合使用。
入门编程采用线上编程平台,较为复杂的实例则需要学生安装IDE ,作为课后过程考核。
这样在课上无需安装软件及第三方库,可以节省课堂上的时间,同时由学生课下自主完成实验编程设计,又可以锻炼学生独立自主解决问题的能力。
(4)教学内容结构图1 教学内容架构基础编程部分包括基本语法与基本流程控制、函数与代码复用、程序设计方法、数据组合类型。
在案例及应用教学中,根据医学学科特点,重点为数据分析与处理,数据格式化方法及数据可视化方法。
学习科学计算的基础库numpy 的使用、提供绘图功能的第三方库matplotlib 的使用,熟练使用requests 库及beautifulsoup4库进行数据爬取及解析。
课程总体与医学相关实例占比达到68%。
(5)教学效果笔者对参加该课程的学生104人进行调研。
在课后调研中约有76%的学生觉得对该课程感兴趣,认为在今后的工作生活中可能会用到。
有39%的学生希望在以后深入学习相关知识。
3.总结与展望计算思维已渗入到医学的方方面面,在医学院校已受到高度重视,并且关乎医学信息化的发展。
面向医学院校学生开设以计算思维为基础的python 程序设计实训课程,突出医学应用学科特色、提高医学生学习兴趣,有利于学生计算思维的培养,也是在为以后医疗的信息化与智能化改革助力。
在未来课程设计中,教师未能厘清各学科学生专业学科知识体系结构,未能了解学生亟需实用知识技能,今后教师需要加强生物医学素养,在培养学生计算思维的同时,加强实用技能。
另外,对学生计算思维能力的量化评价客观方法还有待进一步研究。
基金项目:吉林省卫生计生管理模式革新项目“基于EMR 数据的文本挖掘模式研究及价值发现”(2017G024)。
高速列车异步牵引电机谐波转矩的分析与计算
me t h o d t o c a l c u l a t e t h e p ra a me t e r s i n h a r mo n i c c i r c u i t i s p r o p o s e d b a s e d o n t h e e q u i v le a n t c i r c u i t .
2 0 1 3年 8月
Au g .2 0 1 3
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 4 - 8 4 2 5 ( z ) . 2 0 1 3 . 0 8 . 0 0 1
高速 列 车 异 步 牵 引 电机 谐 波转 矩 的分 析 与 计 算
Ab s t r a c t :An e l e c t r i c mo t o r i n s t a l l e d o n t h e h i g h — s p e e d t r a i n i s p o we r e d b y i n v e r t e r a n d wh e n i t i s
An a l y s i s a n d Ca l c u l a t i o n o f As y n c h r o n o u s Tr a c t i o n Mo t o r
f o r t he Hi g h- s p e e d Tr a i n
转速 发 生振 荡, 最终 对车 辆 系统 动力 学特 性 产 生 影 响。针 对 该 问题 , 从 异 步 电机 运行 的 电磁 理 论 出发 , 分析 了产 生 时 间谐 波 转矩 的机 理 , 在 研 究基 波谐 波等 效 电路 的基 础 上 , 提 出了谐 波 电路
中参数的计算方法。导 出了异步电机基 波电磁转矩、 谐波电磁转矩的计算公 式; 获得各阶谐波
交流电动机运行过程中的磁势谐波分析

因占有的空间等于 2 360 电角度,故电角度 = 2 机械角度� 总之 ,对于极对数为 的电机 ,电 角度 = 机械角 度� 因此 ,形 成两极电 机, 应 将定子全部槽数按极数均分为两部分,每部分再 按三相均分为三个区段 , 共得六个区段 ,称为六 个相带, 依次命名为 A � Z � B � X � C �Y , 每个 相带内包括一个或几个槽,如图 3 所示 �如此类 推可形成四极电机等,如图 4 所示 �
2012 年第 28 卷第 2 期
� 石油化工安全环保技术 � P E TR O C H E M IC A L SA F E TY AN D E NV IR ON M E N TAL P R OTE C TION TE C H N OLOG Y
15
安全与环保设计
交 流 电 动 机 运 行 过 程 中 的 磁 势 谐 波 分 析
部中的电流均流入纸面, 三相绕组产生的合成磁 场由上向下,是一个两极磁场 � 因此,使三相绕 电动机的核心部件为绕组 , 交流绕组的形式 � 组在定子槽内互差 120 电角 度, 并按 A � Z �B � ,但其构成原则皆为 : 在导体数目 虽然互不相同 一定的情况下 ,绕组的合成电势和磁势在波形上 接近正弦波, 在幅值上获得的基波电势和基波磁 势最大,定� 转子绕组的损耗小,用铜量省� 对 于三相绕组,各相的电势和磁势对称,电阻与电 抗平衡,绕组的绝缘和机械强度可靠,散热性能好 和用铜量省是衡量电动机性能优略的刚性指标 � X �C �Y 的顺序排列, 则当通入对称的三相交流 电流时,即可得到一个两极的三相绕组� 绕组的 展开图如图 2 所示� 当电机具有两对极时 , 绕组的布置如图 2 所 示 �沿整个定子铁芯内圆开有 12 个槽 ,组成的三 相绕组相当于图 1 所示二极交流电机的绕组重复 一次� 这里的电角度和机械角度是有区别的 � 电
高次谐波磁场所产生的谐波转矩及其对起动的影响
2:起动时负载阻力小, 只需很小的起动转矩
3:起动初期负载阻力小 ,随着转速增加转矩增 加——变转矩负载,如 流体负载。
三、鼠笼式电动机的降压起动
降压起动——起动时,施加低于额定电压的电压。电 动机的转速上升到接近额定转速后,再切换到额定电 压下运行。
对谐波磁场,相 当于分布绕组的 作用
槽配合
定转子一阶齿谐波
Z1 1 Z2 1
p
p
即:Z1 Z2 , Z1 Z2 2 p
为要消除齿谐波同步转矩,定子齿数与
转子齿数不应相等,它们之间的差数也 不应等于极数。
异步电动机的调速与制动
一、异步电动机调速方法
异步电动机的转速
n 60 f 1 s
由于槽深而窄,转子漏抗较普通鼠笼式转子漏抗大— —功率因数及过载能力有所降低。
六、双鼠笼式异步电动机
Double-squirrel-cage rotor
外笼Top bar: 截面小,电阻大 内笼Bottom bar: 截面大,电阻小 内笼交链的漏磁通比外 笼多,漏抗也大
1.起动时
转子电流的频率f2=f1,转子漏抗大于转子电阻, 电流分配决定于漏抗。
便由原来的s1=ab,增加至s2=ac,s2 应为s1的1/0.82=1.56倍。 普通鼠笼式异步电动机额定转差率很小, 设s=0.04.则s2=0.062,电动机的转 速便由0.96n1,下降到0.938n1,调速 范围很小。 带恒转矩负载时不适宜采用调压调速方 法。
负载性质为变转矩时:
•由于电流的分布不均匀,等效槽导体的 有效面积减小——集肤效应使槽导体电阻 增加;
•集肤效应作用使槽漏磁通有所减少,转 子漏抗也有所减少,二者均促使起动转矩 增大,改善了起动特性。