ZX-338长度与速度控制器
JN338M-A转矩转速测量仪表使用说明书(新)

⌦开箱检查开箱后,请先按《装箱单》所列项目认真清点,确认箱内物品是否与《装箱单》一致,查看在运输中是否有破损现象。
如有问题,请速与我公司联系。
箱内物品:①装箱单④说明书②仪表⑤安装支架两支③电源线⑥合格证⑦信号连接线☞警告!◆本产品只能与JN338配套产品连接,用户如连接其它设备,可能造成损坏。
◆本产品为非防水、防爆设计。
◆非专业人员请勿拆机检查,以免造成损坏及发生危险。
⌦测量原理与方法电路实现仪表测量以单片机(CPU)为数据处理中心,原理框图如下:计算方法软件采用定时脉冲计数方式,同步测量当前时刻的转矩、转速值。
假定测量定时时间用 T(秒)表示,在T的时间内,转矩输出的频率脉冲计数值为Num, 转速输出的频率脉冲计数值为Nun,假定传感器测速码盘齿数为Z,转矩量程为N(牛.米),转矩零点输出频率f,正向满量程输出频率f p , 负向满量程输出频率fr,则由下列公式可计算出当前时刻的转速值:转速 = (Nun 60)/(T❿Z) (转/分)正向转矩 = N (Num/T-f)/(fp-f) ( 牛.米)负向转矩 = N (Num/T-f)/(f-fr) ( 牛.米)注:测量周期T的设定值越大,转矩转速的测量准确度就越高,稳定性越好,同时测量数据的显示响应时间会相应加长,用户可根据自己的实际工作需要,适当设置测量周期的长短。
⌦技术指标转速不准确度:≤0.1%转矩不准确度:≤0.1%F·S绝缘电阻:≥200MΩ环境温度: -20~60℃环境湿度:≤90%RH消耗功率:≤13W⌦仪表功能及特点JN338系列转矩转速测量仪表用于配接JN-338系列转矩转速传感器,为了使用户能够更加直观地进行现场数据的测量和显示,该仪表提供了以下功能:✧等间隔定时测量,测量周期T=20--2000ms可设定,采用定时脉冲计数的方式,同步测量当前时刻的转矩、转速值。
✧显示窗口,提供3个5位显示窗口,分别显示转矩、转速、功率的测量值,同时可切换显示测量过程中的转矩最大值,并给出正、负扭矩指示。
中特威 Beast Pro SS 160A G2 无刷电子调速器说明书.pdf

无刷电子调速器说明书感谢您购买中特威产品,Beast Pro G2 系列电调是我们新一代高性能有感无刷电子调速器(竞赛版本)。
无刷动力系统功率强大,请您在使用设备前仔细阅读本说明书。
深圳市中特威科技有限公司有权不经通知变更其产品,包括其外观和性能参数及使用要求;对其产品是否适合特定用途不作任何保证、申明或承诺。
不承担因第三方产品相关修改所引起的任何责任,中特威科技有限公司也不承担因应用该产品而产生的任何责任,包括直接损失或间接损失的赔偿责任。
不能让小孩在无成人监管的情况下使用此产品。
电调在使用过程中可能会变烫,拿的时候要小心。
若需对电调的输入输出线、插头做相关焊接时,请使用至少60W功率的焊接设备进行焊接。
不使用电调时需要断开电池。
使用电调时不能靠近易燃物品。
如果电调出现过热,冒烟或者着火,请立即停止使用,断开电池并寻求帮助。
1. 全铝制金属外壳设计,散热性能优异,耐流能力强大。
2. 更加丰富的参数设置,允许设置大多数竞赛级参数,例如Modified模式、Stock模式、零进角、漂移等。
3. 采用高性能的32位处理器,提供更加强大的数据处理能力以及更精准的油门输出。
4. 全新的软件设计,超流畅的启动与精准的油门线性。
5. 多重保护功能:电池低压保护、过温保护、油门信号丢失保护。
6. 内置蓝牙,可通过手机APP对电调进行参数设置及软件升级(支持实时调参,无需重启电调)。
7. 支持实时数据记录功能,可实时查看电调最高温度、马达转速、电压、进角等数据,注意事项主要特性产品规格电池连接电调连接电池时,要特别注意正负极位置,错误的连接会损坏电调和电池。
如上图所示,电调正极线连接电池的正极,负极线连接电池的负极。
电机连接(1)有感模式连接有感无刷马达时,电调与马达相连有严格的线序要求,电调的#A/#B/#C必须与电机的#A/#B/#C三线严格一一对应,用6针感应线把电调与电机的感应口对接。
(2)无感模式连接无感无刷马达时,电调与马达相连无严格的线序要求,电调的#A/#B/#C可以与电机的三线随意对接,若出现转向相反,任意交换两条马达线即可。
DMK 33GX273 技术手册说明书

技术细节1.要件速览 42.尺寸图 6 2.1DMK 33GX273 带脚架适配器的C型接口 (6)2.2DMK 33GX273 不带脚架适配器的C型接口 (7)2.3DMK 33GX273 带脚架适配器的CS型接口 (8)2.4DMK 33GX273 不带脚架适配器的CS型接口 (9)3.I/O 连接器 10 3.16-pin I/O 连接器 (10)3.1.1TRIGGER_IN (10)3.1.2STROBE_OUT (11)4.光谱特征 124.1光谱灵敏度 - IMX273LLR-C (12)5.相机控制 13 5.1传感器读出控制 (13)5.1.1像素格式 (13)5.1.1.18-Bit Monochrome (13)12-Bit Packed Monochrome (13)5.1.1.25.1.1.316-Bit Monochrome (14)5.1.2分辨率 (14)5.1.3读出模式 (14)5.1.4帧速率 (15)5.1.5局部扫描偏移 (16)5.1.6图像翻转 (16)5.2图像传感器控制 (17)5.2.1曝光时间 (17)5.2.2增益 (17)5.2.3黑电平 (18)5.3自动曝光及增益控制 (18)自动曝光 (18)5.3.15.3.2自动增益 (19)5.3.3自动参考值 (19)5.3.4强光缩减 (19)5.3.5自动曝光限制 (19)5.3.6自动增益限制 (20)5.4触发 (21)5.4.1触发模式 (21)5.4.2触发极性 (21)5.4.3软件触发 (21)5.4.4触发脉冲计数 (22)5.4.5触发源 (22)5.4.6触发重叠 (22)5.4.7IM X低延迟模式 (22)5.5触发定时参数 (23)5.5.1触发延迟 (23)5.5.2触发去抖时间 (23)5.5.3触发遮罩时间 (24)5.5.4触发噪声抑制时间 (24)5.6数字I/O (24)5.6.1通用输入 (24)5.6.2通用输出 (25)5.7频闪 (25)5.7.1频闪启用 (25)5.7.2频闪极性 (26)5.7.3频闪操作 (26)5.7.4频闪时间 (26)5.7.5頻閃延遲 (26)5.8图像处理 (27)伽玛 (27)5.8.15.8.2查找表 (27)5.9自动功能感兴趣的区域 (28)5.9.1自动功能ROI启用 (28)5.9.2自动功能ROI预设 (28)5.9.3自动功能ROI自定义矩形 (29)5.10用户设置 (30)5.10.1用户设置选择器 (30)5.10.2加载用户设置 (30)5.10.3保存用户设置 (30)5.10.4默认用户配置 (31)5.11多帧输出模式启用 (31)5.11.1多帧输出模式启用 (31)5.11.2多帧输出模式帧计数 (31)5.11.3多帧输出模式曝光时间 (32)5.11.4多帧输出模式自定义增益 (32)5.11.5多帧输出模式增益 (32)6.R ev i s i o n H i story 341要件速览2尺寸图2.1DMK 33GX273 带脚架适配器的C型接口2.4DMK 33GX273 不带脚架适配器的CS型接口3I/O 连接器3.16-pin I/O 连接器相机后视图1开极闸M OS F E T最大限制0.2A(ID)!2启动电流最低条件3.5 m A!3 G:地O:输出I:输入3.1.1T RIGG E R_I NTRIGGER_IN线可用于将曝光时间的开始与外部事件同步。
麦科MX2H-CAN-BD通讯扩展卡模块硬件手册说明书

MX2H-CAN-BD通讯扩展卡模块硬件手册感谢您选用麦科电气技术有限公司开发生产的可编程控制器(PLC)。
在安装、使用本产品前,请您仔细阅读本手册。
本手册介绍了MX2H-CAN-BD通讯扩展卡模块的电气规格、产品规格、安装配线和维护等部分说明。
让您能清楚地掌握本产品的特性以及丰富的功能。
若需要更详细的产品资料,可参考我公司发行的《MX系列可编程控制器用户手册》。
MX2H-CAN-BD的外形结构如图1所示。
• 外形结构• 端口定义说明• 电源消耗规格MX2H-CAN-BD扩展卡为MX2H系列PLC主模块的通讯扩展卡,该卡提供了隔离的CAN接口,安装上CAN通讯卡之后,在PLC主模块上可支持自由口协议和MXLink通讯协议(主站、从站)。
• 产品规格MX2H-CAN-BD接口引脚定义:安装说明:1.将MX2H-CAN-BD扩展卡模块插入主模块,确保接口对齐。
2.将扩展卡两端螺丝安装好,保证扩展卡安装端正。
3.将主模块上盖带有卡扣的一端插入主模块,确保接插件对准,然后将另一端向下按。
4.卸载时将卡扣往后按,然后向上拔起,取下主模块上盖,再将螺丝卸下,取下扩展卡。
图2 扩展卡安装示例• 通讯口特性☞注意隔离扩展卡最高支持250K,不隔离扩展卡最高支持500K。
• 与CAN通讯相关的SD元件• CAN通讯网络的硬件配线CAN-Bus简介CAN(Controller Area Network)即控制器局域网络,属于工业现场总线的范畴。
与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性、灵活性。
CAN控制器工作于多主方式,网络中的各节点都可根据总线访问优先权向总线发送数据。
CANBUS网络上任意一个节点均可以在任意时刻主动向网络上的其它节点发送信息,而不分主从。
通讯灵活,可方便地构成多机备份系统及分布式监控、控制系统。
具有点对点,一点对多点及全局广播传送接收数据的功能。
1.终端电阻为了最大程度地减小线路末端的反射,请务必在线路的两个PLC终端站点分别设置一个终端电阻。
高性能众核处理器申威26010

DOI : 10.7544/issnl000-1239.2021.2020104158(6) : 1155 1165, 2021计算机研究与发展Journal of Computer Research and Development高性能众核处理器申威26010胡向东柯希明尹飞张新马永飞颜世云马超(上海高性能集成电路设计中心上海201204)(huxdisme@ vip. sina. com)Shenwei-26010: A High-Performance Many-Core ProcessorHu Xiangdong, Ke Ximing, Yin Fei , Zhao Xin, Ma Yongfei , Yan Shiyun, and Ma Chao(Shanghai High-Performance Integrated Circuit Design Center , Shanghai 201204)Abstract Based on the multi-core processor Shenwei 1600, the high-performance many-core processorShenwei 26010 adopts SoC (system on chip) technology, and integrates 4 computing-control cores and256 computing cores in a single chip. It adopts a 64-bit RISC (reduced instruction set computer)instruction set designed with an original design, and supports 256-bit SIMD (single instruction multiple data ) integer and floating-point vector-acceleration operations. Its peak performance for double precision floating-point operations reaches 3.168TFLOPS. Shenwei 26010 processor is manufactured using 28 nm process technology. The die area of the chip is more than 500 mm 2 , and the260 cores of the chip can run stably with a frequency of 1.5 GHz. Shenwei 26010 processor adopts avariety of low power-consumption designs on the architecture level , the microarchitecture level , and the circuit level, and thus, leading to a peak energy-efficiency-ratio of 10.559GFLOPS/W. Notably, both the operating frequency and the energy-efficiency-ratio of the chip are higher t h an those of theworldwide contemporary processor products. Through the technical innovations of high frequency design, stable reliability design and yield design, Shenwei 26010 has effectively solved the issues of high frequency target, power consumption wall, stability and reliability, and yield, all of which are encountered when pursuing the goal of high-performance computing. It has been applied successfullyto a 100PFLOPS supercomputer system named Sunway TaihuLight" on a large scale, and therefore, can adequately meet the computing requirements for both scientific and engineering applications.Key words Shenwei instruction set ; computation-control core ; computing core ; low power design ;energy-efficiency-ration摘 要 申威26010高性能众核处理器在多核处理器申威1600基础上,采用片上系统(system on chip ,SoC)技术,在单芯片内集成4个运算控制核心和256个运算核心,采用自主设计的64位申威RISC(reduced instruction set computer)扌旨令系统,支持 256 位 SIMD(single instruction multiple data )整数和浮点向量加速运算,单芯片双精度浮点峰值性能达3.168TFLOPS.申威26010处理器基于28 nm 工艺流片,芯片die 面积超过500 mm 2,芯片260个核心稳定运行频率达1.5 GHz.申威26010处理器从结 构级、微结构级到电路级,综合采用多种低功耗设计技术,峰值能效比达10.559GFLOPS/W .芯片运行 频率和能效比均超过同时期国际同类型处理器.申威26010通过在高频率设计、稳定可靠性设计和成品率设计等方面的技术创新,有效解决了芯片在实现高性能目标中所遇到的高频率目标、功耗墙、稳定可靠性和成品率等难题,成功大规模应用于国产10万万亿次超级计算机系统“申威•太湖之光”有效满足了科学与工程应用的计算需求.收稿日期:2020-12-21;修回日期=2021-04-26基金项目:“核高基”国家科技重大专项基金项目(2013ZX01028-001-001)This work was supported by the National Science and Technology Major Projects of Hegaoji (2013ZX01028-001-001).1156计算机研究与发展2021, 58(6)关键词 申威指令集;运算控制核心;运算核心;低功耗设计;能效比中图法分类号TP338为了满足国产超级计算机研制对国产高性能CPU(central processing unit )的迫切需求,“十一一五”期间,在“核高基”国家科技重大专项的支持下, 申威处理器研发团队完成了高性能多核CPU 芯片申威1600的研发⑴,申威1600被成功应用于第一 台全部基于国产CPU 芯片构建的国产千万亿次超级计算机系统“神威•蓝光”“十二五”期间,申威研 发团队继续在国家“核高基”重大专项的支持下,成 功完成了高性能众核处理器申威26010的研发.为了在性能和稳定可靠性等方面满足构建国产新一代 超级计算机系统的需求,芯片研发团队在高性能多 核处理器申威1600研发成果和技术基础上,突破了 芯片结构设计、低功耗设计、稳定可靠性和成品率设计等多个方面的关键技术,最终于2014年完成芯片 研制,并大规模应用于国产10万万亿次计算机系统 “神威•太湖之光",该系统从2016年6月开始连续4次蝉联全球超级计算机排行榜Top500冠 军,基于该系统的应用课题2次斩获超级计算应用 最高奖一一“戈登•贝尔奖”申威26010芯片采用片上系统(system on chip,SoC)技术,片上集成了 4个运算控制核心和256个运算核心,以及4路128位DDR3存储访问接口和8通路PCI-E3.0等I/O 接口.该芯片采用28 nm 工艺流片,晶体管数量达到50亿,die 面积超过500 mm 2 , 已接近芯片代工生产极限.处理器核心工作频率达 到1.5GHz,双精度浮点峰值性能达3.168TFLOPS,峰值功耗近300W.要实现芯片的性能、功耗和稳定可靠性等多个方面技术指标,芯片研发在结构和微 结构、正确性、低功耗、稳定可靠性和成品率等方面遇到了巨大的挑战,本文主要阐述应对这些挑战的 设计方法•1结构与组成1.1总体结构申威26010处理器采用分布共享SoC 芯片架构,全芯片共集成了 4个运算控制核心和256个 运算核心,以及4路128 b 的DDR3存储器控制接口和8通路PCI-E3.0等I/O 接口,总体结构如图1所示.申威26010片上包含4个核组、1个系统接口Fig. 1 The overall structure of Shenwei 26010图1申威26010总体结构图胡向东等:高性能众核处理器申威260101157和1套片上网络.每个核组包含1个运算控制核心、1个8X8的运算核心阵列和1个协议处理部件及智能存储器访问控制接口iMC;系统接口连接PCI-E3.0和以太网等I/O接口;片上网络实现4个核组和系统接口之间的互连•自主指令集是国产处理器冲破国外同行业的技术封锁和知识产权壁垒的基础,申威26010处理器的2类核心采用申威自主64b的RISC指令集,运算控制核心和运算核心的基础指令集保持兼容,支持8b,16b,32b和64b整数运算、单精度和双精度浮点运算,并根据高性能应用需求进行了扩展:类核心均支持256b的SIMD扩展指令,支持整数和浮点的短向量操作,使得运算控制核心每个时钟周期最快可以完成16个双精度浮点运算,运算核心每个时钟周期最快可以完成8个双精度浮点运算•1.2运算控制核心和运算核心芯片集成的运算控制核心负责芯片资源管理,提供各种系统服务功能,并承担系统中无法并行化的应用程序段的执行,因此对该核心的管理功能和计算性能要求均很高.申威26010的运算控制核心由指令流水线、运算流水线、访存流水线和2级Cache等部分组成.采用4译码7发射指令流水线结构,支持同时发射5条整数类指令(含访存指令)和2条浮点类指令,支持指令预取、转移预测、寄存器更名、乱序发射、乱序执行和推测执行•运算流水线包含5条整数流水线、2条支持256b的SIMD指令的浮点流水线以及对应的寄存器文件.访存流水线处理访存指令,实现对存储器空间和I/O空间的访问,控制数据Cache的访问.每个核心集成了容量均为32KB的一级指令Cache和一级数据Cache,以及指令和数据共享的512KB二级Cache.运算控制核心的总体结构如图2所示.芯片集成的运算核心主要承担计算任务,由指令流水线、运算流水线、访存流水线、16KB一级指令Cache和64KB可重构局部数据存储器等部分组成.运算核心指令流水线采用2译码2发射结构,支持乱序发射、乱序执行和乱序退出•运算流水线包含2条运算流水线,其中1条运算流水线支持256b的SIMD指令,支持整数和浮点的短向量加速计算,另一条为整数运算流水线,支持32b和64b整数算术运算、逻辑运算、移位运算以及访存地址的计算等, 2条运算流水线共享1个寄存器文件.访存流水线处理访存指令,实现对存储器空间的访问,并控制可重构局部数据存储器的访问•根据应用需要,可将核心局部数据存储器重构成软硬件协同Cache结构.Fig.2The structure of the computation-controlling core图2运算控制核心结构图芯片的2类核心通过支持256b的单指令流多数据流SIMD指令,支持整数和浮点的短向量操作,实现单条指令同时对多个不同数据完成相同操作,实现核心内的数据级并行;2类核心实现的超标量结构支持核心内的指令级并行处理;核组内的不同核心之间和核组之间支持线程级或进程级等更高层次的并行处理.基于芯片支持的多粒度多层次并行处理功能,使得在1.5GHz工作频率下单个运算控制核心的双精度浮点峰值性能达到24GFLOPS,单个运算核心的双精度浮点峰值性能达到12GFLOPS,芯片集成的260个核心提供的双精度浮点峰值性能可达3.168TFLOPS.1・3片上存储结构芯片集成的运算核心采用了局部数据存储器技术,每个运算核心的局部数据存储器可由软件完成数据的缓存管理,不同管理方式可同时存在并支持局部数据存储器容量的动态划分,充分结合硬件的高效性和软件的灵活性,降低芯片实现开销并满足应用对存储的需要.运算核心的指令存储器采用Cache结构,硬件支持对一级指令Cache的指令脱靶进行合并,提高了存储总线带宽的利用率.运算核心阵列集成了更大容量的共享二级指令Cache,进一步提高了具有局部性的指令访问命中率,降低指令脱靶访问延迟,并且减少指令脱靶对主存储器的频繁访问•为支持片上存储的高效使用和数据在运算核心1158计算机研究与发展2021,58()中的灵活分配,运算核心在能够直接访问主存空间的同时,采用了多模式数据流传输技术,支持数据在核心局部数据存储器和主存间的批量带跨步的异步数据传输,实现计算与访存的并行.每个存储访问接口还实现了智能访存优化算法,优化算法可以依据不同课题的访存特征对访存请求进行访问优化,以有效提高存储带宽的使用效率.申威26010核组的运算核心阵列还实现了基于预约调度的传输总线技术,多个运算核心的访存行为由集中控制器进行统一管理,多核心复用的总线资源按照效率优先兼顾公平的算法进行节拍级调度和分配,充分保证运算核心的服务质量,提升了访存效率.总之,申威26010处理器的片上存储结构有效利用了片上资源,缓解了访存墙问题.2正确性验证高性能处理器的正确性验证至今仍是一个业界难题,而申威26010处理器设计规模庞大、结构复杂,内部包含4个运算控制核心、256个运算核心、4路高带宽DDR3存储控制接口等众多功能模块,组成了一个逻辑极其复杂的片上系统.申威26010还包含核心、核组和芯片等多个设计层次,较多的设计层次使得片内运行控制更加复杂,逻辑信号传递路径越深,传递过程中的各种组合情况越复杂,设计错误隐藏也越深,验证难度越大.这个复杂的片上系统对正确性验证提出了严峻的挑战,如果仅仅采用传统处理器验证方法,难以在有限的研发周期内完成芯片的验证工作,为此,芯片验证团队在借鉴以往验证经验的基础上,主要采用了3种技术方法:1)综合采用多种验证手段.申威26010芯片综合采用了模拟验证、硬件仿真加速器验证[力、FPGA实物验证8和形式验证凹等多种验证方法.模拟验证作为一种传统的验证方法,可观性好,错误定位快,但其验证速度随着验证对象规模的增大而降低,由于申威26010在设计的模块级和部件级规模相对较小,主要采用该方法来进行验证,取得了较好验证效果;硬件仿真加速器验证的验证速度可以比模拟验证快很多,而且可观性好,验证过程中的信号状态可以全程跟踪,错误定位便捷,用于验证的中后期,芯片有了基本正确性以后,在核心以上层次支撑操作系统及应用程序等较大规模测试程序的验证,申威26010的硬件仿真加速器验证环境上几乎发现了全部软硬件接口相关的设计错误,取得了很好的验证效果;FPGA实物验证的验证速度比硬件仿真加速验证更快,主要用于在核心以上层次支撑大量应用级测试程序的验证,申威26010基于自研的单核、单核组、多核组和全片等多种不同规模的FPGA验证平台,实现了多个层次在应用级的快速验证,有效加快了芯片的错误收敛速度;形式验证在申威26010中主要用于RTL设计与后端物理实现之间的等价性验证.2)采用层次化的验证策略.针对申威26010的层次化结构和芯片规模超大特性,将芯片的正确性验证分为模块级、部件级和芯片级3个层次,开发以白盒、黑盒和灰盒测试理论指导下的基于约束的随机激励、基于断言的定向激励以及多元化事务激励、场景激励,分解激励开发和验证难度,满足不同层次验证环境对运行速度和验证资源的需求.模块级运行速度快,资源用量少,侧重白盒焦点验证,在信号层面开发各种激励确保底层模块验证覆盖率.部件级运行速度较快,验证资源用量中等,侧重在协议层面开发激励,既包含白盒焦点验证和灰盒验证,也含有黑盒自动化验证.芯片级运行速度慢,验证资源用量大,侧重于在指令序列等软件可见状态层面构建自动化验证环境进行黑盒方式验证.3)构建可重构芯片级验证环境.可重构芯片级验证环境支持多种参数化配置,使得验证人员能够根据不同的验证需求,自由灵活地构建芯片级验证环境,较好地解决了验证覆盖率和模拟仿真速度之间的矛盾,也较好地解决了验证规模与运算资源之间的矛盾,取得了很好的验证效果.申威26010的可重构芯片级验证环境如图3所示.该环境支持芯片中的核组数量可配置,可以配置芯片的核组数量为1~4个,支持单核组中运算核心数量可配置,可以配置的运算核心数量为1〜64个;支持对各核组内的运算核心阵列中的真、伪运算核心进行替换,其中伪运算核心是一个运算核心接口模型,伪运算核心模型的接口行为与真实核心完全一致,但其设计规模远小于真实运算核心;支持对各核组中的访存接口进行多种配置,包括使用真实的设计模型、虚拟存储器接口模型等;支持对芯片中的PCI-E和以太网接口进行配置,可选择芯片RTL模型中是否包含这2个接口.申威26010通过综合采用多种验证方法,以及多层次、多规模的验证,发挥各种验证方法的优势,从不同验证层次和验证视角实现交叉验证和优势胡向东等:高性能众核处理器申威260101159算制心运控核运算核心(真、伪运算 核心数量可配)协议处理部件访存接口 (真、伪可配)存储器核组0 ;-----核组1核组2核组3(芯片内核组数量可配)系统接口芯片接口验证组件集成验证组件的可配置RTL 模型Fig. 3 Reconfigurable chip-level verification environment图3可重构芯片级验证环境互补,最终取得了很好的验证效果,实现了一次流片 成功的目标.3物理实现申威26010规模庞大,芯片尺寸已接近生产极 限,这对物理实现来说是个极大的挑战,为了完成如 此大规模芯片的物理设计且实现高性能的目标,本芯片采用高可复用层次化物理设计、高性能时钟系 统设计和定制综合混合设计等方法,基于28 nm 工 艺实现了 1.5 GHz 的频率指标•3.1高可复用层次化物理设计层次化物理设计方法是实现超大规模芯片设计 的基础,该方法实现了物理设计并行化,提高了后端 设计团队在统一平台上分工协作的效率,同时层次化的设计可以缩小模块的设计规模,减轻设计及检查分析对计算资源需求的压力,缩短设计优化的周期,从而可以通过增加优化迭代的次数,取得更好的 设计优化效果•本芯片采用的高可复用物理设计方 法支持电路和版图的层次化设计,同时支持静态时 序分析、功耗分析、等价性验证和可靠性分析等层次化的检查分析,从而高效地实现了申威26010这款 极大规模芯片的物理设计.申威26010物理实现上分为核心、核组和芯片3个全局层次,采用自顶向下的策略,以全片 Floorplan 设计、全局电地设计以及全局时钟设计为主导,根据芯片总体要求和信号连接关系,依次确定 芯片、核组和核心的面积和各层次模块的相对位置 关系,制定时钟网络的实现方案,给出各层次顶层的设计资源和设计约束,实现芯片的总体布局和规划. 各模块在顶层模块给予的设计约束下进行设计和优 化,并将结果依次反馈给上一层次进行调整优化,实现自底向上的反馈回路.层次化的设计中采用了高 可复用性的策略,功能模块和缓存模块设计好后进 行IP 化处理,给核心层进行复用,核心层固化后在核组层进行复用,在芯片层对核组进行复用,实现了 高效的层次化设计.3.2高性能时钟系统设计全芯片包含了多种不同频率时钟,包括:控制核心时钟、运算核心时钟、存控时钟、PCIE 时钟、全局 时钟、接口及维护时钟等.其中全局时钟频率达到1.4 GHz,控制核心和运算核心的频率均达到1.5 GHz.不同时钟在分布范围、时钟偏斜和时钟功耗上有不 同的指标要求,需要根据它们的特点分别采用不同 的设计方法:1) 对于运算核心时钟、控制核心时钟和全局时钟3种高频率且分布范围广的时钟,采用“全局+局 部”层的时钟设计结构,分层次进行低偏斜时钟设计;为增强抗OCV (on -chip variation )的能力,全局 时钟采用对称Htree 型结构,实现时钟从源头到各 终点传播延时的精准控制.在模块局部时钟设计中,直接采用“大驱动+ MESH ”的方式直连到各时序单元,确保时钟信号传播的低延时和低偏斜.一个运算 核组的时钟分布如图4所示.2) 对于分布范围较小或频率较低的其他时钟按照平衡时钟树的方式进行单层时钟结构设计,在满足设计性能的同时也大大降低了设计复杂度•通过上述设计方法,申威26010的各咼频时钟1160计算机研究与发展2021,58(6)Fig.4Clock network distribution of an computingcore group图4一个运算核组的时钟网络分布图全片分布最大偏斜均控制在10ps以内,时钟占空比达到49.85%〜50.15%,经流片测试各时钟均可以稳定运行在设计频率下,达到了设计目标•3.3高性能定制设计申威26010芯片2类核心的逻辑非常复杂,为了达到频率设计目标,采用了多种定制设计技术:1)全局通路设计在全局芯片布局设计时优先考虑关键时序通路的设计,尽可能缩短其物理长度.此外在全局布线的金属资源选取上,也将传播速度较快的高层金属尽量向关键通路倾斜,确保关键通路的时序可以满足设计要求.2)定制存储器设计访存路径一直是处理器的关键路径所在,需要进一步提升片上SRAM阵列的访存速度.商用的存储器综合工具(Memory Compiler)已无法满足存储器的频率要求,申威26010处理器内部主要Cache 阵列均为定制实现,包含单端口和双端口阵列•定制存储器采用了容偏差灵敏放大器设计、高速译码器设计和自定时电路等关键技术[0],速度比基于商用工具生成的存储器快27%〜37%.此外寄存器文件也是关键路径所在,由于读写端口众多,综合实现方法无法有效地布通走线,且时序难以达到指标,申威26010中的5读5写和7读4写寄存器文件均为定制设计,采用了自研多端口bitcell(存储单元)、高速译码电路和多米诺读出电路等关键技术,最终满足了寄存器文件的频率设计要求.3)高性能时钟树定制设计为尽可能降低时钟偏斜、降低时钟延时和增强其抗OCV的能力,全芯片3个主要高频时钟均采用定制设计方式实现,时钟主干采用定制Htree时钟树结构,时钟的一级驱动单元、二级驱动单元及门控驱动单元均采用定制实现,确保整个时钟树设计具备低传播延时和低传播偏斜的特性•通过这3种技术手段,芯片最终可以稳定运行在1.5GHz,工作频率高于国际上同期同类芯片,使芯片性能达到了设计预期,双精度浮点峰值性能达到了 3.168TFLOPS的设计指标.3.4高性能综合设计为提高设计效率,芯片的大部分控制与运算逻辑模块均采用了综合设计方法来实现,在传统商用综合设计流程的基础上,芯片开发团队根据芯片的特点自行定制开发了多项自动化功能,例如:自动填充物理信息的逻辑综合功能、关键逻辑自动打包聚集功能、根据时序自动调整并优化关键路径权重功能、自动创建定制Mesh时钟树功能、对关键路径或指定路径优先进行布线功能、自动在大反转电流单元两侧插入去耦电容功能[1]、集成时序分析及时序自动优化功能、集成设计规则检查及自动修复功能等.通过对综合流程的深度定制化开发,大大提高了综合设计质量和效率,模块级设计频率较标准商用流程提升15%〜20%,布线错误率下降90%,极大地提高了设计的效率和质量.4低功耗设计随着晶体管数量的增加和工作频率的提高,降低处理器的功耗变得越来越重要[2「13].申威26010在实现高性能的同时,从结构级、微结构级到电路级,综合采用多层次功耗优化技术来降低处理器的功耗.1)结构级低功耗设计申威26010在结构级采用的低功耗设计技术有:①申威26010的结构设计思想是通过集成众多核心来提升性能,适当降低单核心最高工作频率的要求,避免过高工作频率带来功耗的快速上升,从而有效地提升了芯片的能效比.胡向东等:高性能众核处理器申威260101161②支持多种形态的工作模式.包括深度睡眠、浅睡眠和低功耗运行模式.对较长时间无工作负载的核心,可控制使其处于极低工作频率的深度睡眠状态,最大限度降低运行功耗;对短时间无工作负载的核心,特殊的停机指令可使核心处于浅睡眠状态,杜绝核心绝大多数信号的翻转从而降低功耗;对运行速度要求较低的应用程序,可以动态调整指令发射速度,达到降低运行功耗的目的.③多频率设计.在满足性能需求前提下,仅核心采用最高工作频率,互连部件、存储控制器和系统接口则采取较低的工作频率,降低运行功耗.2)微结构级低功耗设计申威26010在微结构级采用的低功耗设计技术有:①功能部件动态配置.采用动态切割方式,支持不同层次的部件切割,以降低功耗.一是核心级,可以根据应用需求的核心数量,将不使用的核心断开,使其处于极低工作频率状态;二是部件级,对浮点部件或SIMD运算部件,在运行无浮点操作或无SIMD运算的应用时,可动态关闭浮点部件或SIMD 部件的时钟,降低核心的运行功耗.②多端口存储器设计.Cache存储器设计采用“虚拟多端口”技术来减少物理端口数量,既降低功耗,也有效降低芯片面积.其中运算控制核心的指令Cache和二级Cache都采用物理单端口存储器,虚拟实现双端口功能,数据Cache则采用双端口存储器实现了虚拟三端口的功能.③I/O低功耗支持.DDR3存储器接口和PCI-E 接口都支持低功耗模式,在没有访问请求时,可自动处于低功耗状态.3)电路级低功耗设计申威26010在电路级采用的低功耗设计技术有:①采用多层次多粒度的门控时钟方式.降低平均运行功耗,细粒度控制可在模块内部实现对一定数量的触发器进行控制,粗粒度控制可在模块级、核心级和核组级进行时钟控制,从而实现不同工作模式下降低功耗的目标.同时采取动态功耗分析和电压降分析,通过布局优化和放置片上电容,避免门控时钟在降低功耗的同时造成动态电压降影响电路工作的稳定性.②采用多阈值晶体管混合设计.以常规阈值晶体管为主体进行设计,用速度最快的低阈值晶体管进行关键时序路径的优化,这样在满足设计频率目标前提下,尽可能采用高阈值晶体管来优化漏电功耗.通过此设计策略,在申威26010的50亿晶体管中,低阈值晶体管数量仅占1.97%,使得常温下漏电功耗仅为12W.5可靠性设计申威26010在使用中根据运行课题的不同,芯片的实际功耗往往会在几十瓦到几百瓦之间来回波动.频繁的大幅度功耗波动给芯片的稳定可靠性带来了严峻的挑战.为了确保芯片可以在实际系统中稳定运行,申威26010从结构设计到物理设计综合采用了多种高可靠性设计方法,有效地降低了功耗波动对电源网络系统的影响,确保了芯片在实际系统中的稳定工作.芯片稳定可靠性设计所采用的关键技术方法有:1)电地网络强化设计.在各运算核心和运算控制核心上均采用BUMP垂直供电技术,确保各部分的充足供电;采用自顶向下每层均垂直交叉打孔的网格状方式进行连接;除相互电地隔离的区域外,所有模块电地均在芯片顶层连在一起,构成一张统一完整的大网,确保电源网络的强壮性.2)电地网络隔离设计.同时对于不同核心区域的电地进行物理隔离,避免功耗波动导致的电压波动相互影响.3)去耦电容的按需使用.通过设计流程优化确保各大功耗单元周围插入去耦电容单元,减少电源波动.4)片上时钟变化平滑过渡的控制方法.在芯片整体或局部部件进行时钟频率提升或降低时,按照预设的部件粒度和时间间隔进行频率的变化,使得芯片内部时钟频率变化时功耗按梯度变化,有效降低功耗波动给芯片可靠运行带来的风险.5)片上存储器采取容工艺偏差自调节设计方法.在芯片运行过程中实时感知工艺参数的变化,并根据工艺参数的变化情况自动调整存储器电路的相关参数,以有效容忍制造工艺偏差,提高电路运行的稳定可靠性.6成品率设计越大的芯片面积会导致更大的工艺偏差和更高的制造缺陷概率,从而会导致部分芯片出现性能或功能上的问题,降低芯片成品率.申威26010在设计。
TK-338说明书
xdco2007-05-14 18:38 同时按住LAMP和DIAL键开机,接通电源2秒后进入经销商编程模式进入编程模式后按SCN键,进入1-23项菜单:---------------------1、监听功能:OFF-无监听功能1-按住MONI打开监听2-按MONI打开监听,再按MONI,关闭监听2、扫描功能:OFF-扫描功能无效CO-载波控制扫描tO-时间控制扫描3、DIAL按键OFF-DIAL键无效ON-DIAL键有效4、脱网功能:OFF-此项功能无效tA-脱网功能有效rE-倒频功能有效5、LO键是否有效:OFF-LO键无效ON-LO键有效6、优先信道:OFF-没有优先信道1-固定优先信道2、可变优先信道7、优先信道选择:1-32:优先信道:只在固定优先信道时有效8、回扫周期A:9、回扫周期B:10、恢复信道选择:1-扫描开始时的信道2-在扫描进行中,为最近一次停留的信道。
11、扫描发射暂停时间:因发射而扫描暂停,直至扫描重新启动为止的时间。
12、停留时间:因信号输入而扫描停止时,直至扫描重新启动为止的时间13、发射定时(TOT)OFF-无限制(约10分钟)其它设置:30-300S14、发射限时警告:OFF-无警告音,其它设置为发射开始后到发出警告音的时间10-250S15、TOT恢复时间:OFF-松开PTT键马上回到接收状态,在设定的1-60S内,能信机无法进入发射状态。
16、TOT复位时间:OFF-一停止发射,发射定时器立即复位,准备重新计时,其它1-15秒,未经过设定时间,发射定时器也不复位。
17、静噪控制:0-9,数值越大,静噪越深18、“嘟嘟”音:OFF-没有,ON-有19、信令控制关系:AND-当采用两个信令控制时,双方中都满足,静噪就打开。
OR-当采用两个信令控制时,双主中有一方满足,静噪就打开。
20、电池省电功能:OFF-省电功能无效,ON-省电功能有效21、可变音频CTCSS功能:OFF-CTCSS功能无效,ON-CTCSS功能有效22、删除/追加功能:OFF-不能对扫描信道序列进行删除或追加ON-可以对扫描停产序列进行删除或追加23、经销商和测试模式开放:OFF-以后不能再进行经销商和测试模式ON-保持目前的经销商和测试模式。
ZX-338长度与速度控制器说明书
磁钢
2-3MM
霍尔开关
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
L 按清零开关
000011 选择更改位
0000.00
储存数据并
U00 00 返回运行状态
ZX-338 P 1
R
瑞安市中星工控设备有限公司
6-3 设置提前:
八、参数与输出的关系:
提前
+ -
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
12V CP1 0V 12V CP2 0V 12V CP3 0V 空
11 12 13 14 15 16 17 18 19 20
12V鸣蜂器
电动机
段速
变 控制
输
频
出
运行
器 停止
ZX-338不仅可以控制变频器,同理也可以控制直流 电机以及滑差电动机。详情请致电咨询。
长度速度 外接清零 外 接 信号输入 停止输入 启动输入
倍数后关闭,以此循环输出。
+ -
d
按+或-开关
0.6修 改步长值
十、外接启动开关:
当外接启动开关输入信号时,长度继电器将长期输出至累加长 度到达设置长度或按清零开关时关闭输出。
1 2 3 4 5 6 7 8 9 10
12V CP1 0V 12V CP2 0V 12V CP3 0V 空
P 按清零开关
0.0556 选择更改位
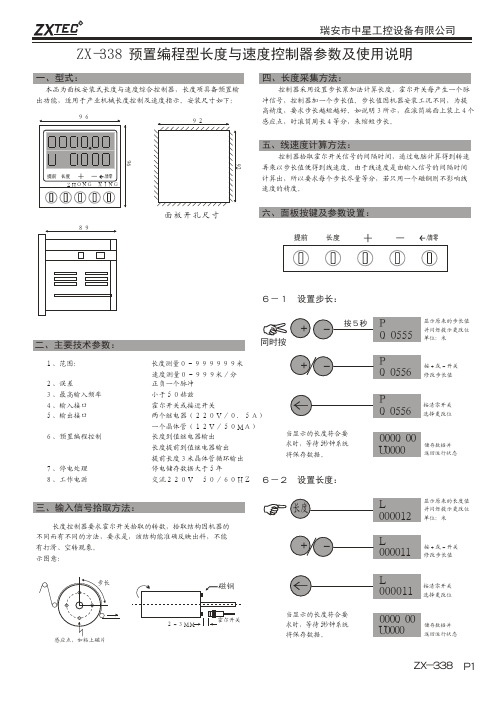
一个晶体管(12V/50MA) 6、预置编程控制 长度到值继电器输出 长度提前到值继电器输出 提前长度3米晶体管循环输出
六、面板按键及参数设置:
89
提前 长度 + - /清零
6-1 设置步长:
二、主要技术参数:
按5秒
DXM700-Bx 无线控制器说明书

数据表DXM700-Bx 无线控制器是一种促进工业物联网(IIoT )应用的工业无线控制器。
作为通信网关,它使用蜂窝连接或有线以太网连接将本地串行端口、本地I/O 端口和本地ISM 电台设备连接到互联网。
•高性能无线通信-使用Sure Cross ® DX80无线网关或支持900MHz 或2.4GHz ISM 频段的多跳电台进行远距离通信。
•灵活且可定制-具备操作规则和ScriptBasic 编程的扩展型内部逻辑控制器,能够开发简单或复杂的解决方案,来处理、记录和控制与多个无线电台及传感器的数据。
•改善速度和内存-升级了内部处理器,支持使用2850个32位整数寄存器、2000个浮点寄存器和1050个非易失性32位整数寄存器;扩展了ScriptBasic 编程能力,可以更快地处理脚本,并能够使用脚本建立更复杂的解决方案•外部通信-蜂窝调制解调器互联网连接•尺寸紧凑-尺寸减小70毫米,从而减少DIN 导轨上占用的空间•简单Sourcing 输出-四路PNP 输出(在30 V DC 时最大为100 mA )可用于本地触发器•行业兼容性-自动化协议包括Modbus/TCP 、Modbus RTU 和EtherNet/IP ™,用于PLC 、HMI 或其他本地主机之间的通信。
•可定制的警报-为警报和提醒提供安全的电子邮件•数据记录到可移动的SD 卡或通过电子邮件发送•带有LCD 和LED 指示灯的交互式可编程用户界面•工业标准的RS-485、以太网和USB 通信端口型号B1 =电台配置B1基本DXM700-用于数据汇总的Modbus控制器传感器和无线网络电源:12-30 V DC通信:RS-485,二级RS-485 输出:四路PNPR1 = 900 MHz,1 W PE5高性能电台(北美)R2 = 900 MHz,1 W HE5多跳数传电台(北美)R3 = 2.4 GHz, 65 mW PE5性能电台(全球)R4 = 2.4 GHz, 65 mW HE5多跳数传电台(全球)R5 = 900 MHz,65 mW HE5L多跳数传电台(用于M-GAGE网络)PTL = 预先编程的DXM700,用于拾取指示灯集成(无电台)B2 =用于数据汇总的Modbus控制器传感器和无线网络电源:12-30 V DC通信:RS-485,二级RS-485 输出:四路PNP连接:管式插孔电源接口一些示例型号包括但不限于:蜂窝通信-控制器只接受邦纳LTE (美国)和GSM (美国以外)调制解调器。
步进电机控制器--说明书

电机,伺服电机可编程控制器AKS-01Z使用说明一、系统特点●控制轴数:单轴;●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);●最高输出频率:40KHz(特别适合控制细分驱动器);●输出频率分辨率:1Hz;●编程条数:99条;输入/1234、5、6一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、CP、CW、OPTP为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:CP————步进脉冲信号CW————电机转向电平信号OPTO————前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。
4、A操作和B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。
但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。
再例如要求步进电机在两个行程开关之间往复运行n次,等等。
在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“A操作”和“B操作”。
以“A操作”为例,工作流程为:当程序在运行时,如果“A操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“A操作”入口地址所指定的程序处运行程序。
5、输入1和输入2通过开关量输入端。
6、输出1、输出2和输出3通过开关量输出端。
7、C OM+、COM—输入输出开关量外部电源,本电源为DC12V/0.3A,COM+为正端,COM—为负端,此电源由控制器内部隔离提供。
8、成后按参数分两行显示,第一行显示参数的名称,第二行显示参数数据。
参数修改方式:进入参数设定状态后,首先显示第一行[JF-------]。
ZXT-C 系列自动恒张力控制器 说明书

18、数值设定旋钮: 调整或设定张力控制器 的数据。
19、手动开关:按此 开关张力控制器将选择 手动调整张力的模式
工作,同时手动模式指 示灯亮。
20、手动模式指示灯 :此指示灯亮时指控制 器处于手动模式。 21、预输出开关:若 自动张力控制器工作于 收卷模式进行动态换
轴时,需要先将待工作 的收卷轴预先启动,此 时可按此开关 可以使待工作的收卷轴 按设定的换轴输出比例 运行。
R
ZXT-C 系列自动恒张力控制器使用说明
P1
一、型号说明
ZXT-C-600
表 示 最 大 使 用 张 力 600表示600牛顿
版本型号
产品系列名称
二、控制器及张力检出器外型尺寸
228MM
155MM 148MM
测量 设定 输出 输出
150N 150N A=045.0% B=020.0%
N %
输出/OUTPUT 自动/AUTO 手动/MANUAL
→
★ 输入端口MI3预启动输入与操作面板的“ 预启动”功能相同。
★ 磁 粉 输 出 端 P 1 、 N 1 和 P 2 、 N 2 切 不 可 以 连 接 在 一 起 。
R
ZXT-C 系列自动恒张力控制器使用说明
P9
主机
RS485
ZXT-C
ZXT-C
ZXT-C
主机同时控制多台张力控制器
22、 换轴开关:用来选择A 轴为工作轴或B轴为工 作轴。
五、恒张力控制原理
该 自动恒张力控制器的工作原理为两只张力检出器测量到实
际目标张力(即测量张力),与人为设定所需的工作张力(即
设定张力)相比较,如果两个比较的张力相等时,张力控制器
不调节输出比例,而两个比较的张力不等时,张力控制器将判
E2 压榨法取油-压榨
εn与P 的关系(水压机榨米糠)
▲ 榨料受压状态 静态压榨—榨料受压时颗粒间位置相对固定,
无剧烈位移交错,因而在高压下粒子因塑性变形易 结成硬饼。静态压榨易产生油路过早闭塞、排油分 布不均的现象。
动态压榨—榨料在全过程中呈运动变形状态, 粒子间在不断运动中压榨成形,且油路不断被压缩 和打开,有利于油脂在短时间内从孔道中被挤压出 来。
而不断挤紧,直接接触的榨料粒子相互间产生压 力而造成榨料的塑性变形,尤其在油膜破裂处将 会相互结成一体。
榨料松散体→弹性、塑性变形→完整可塑体
榨料容重增大→
油脂排出 摩擦生热(混合气体排出) 蛋白质变性、结合等化学变化
(二)压榨取油的必要条件
榨料通道中油脂的液压越大越好 榨料中流油毛细管直径越大越好、数量越多越好 流油毛细管的长度越短越好 压榨时间在一定限度内要尽量长些 受压油脂的黏度越低越好
芝麻*
60
1.2 38.8 10.0 2.0 88.0 2.01 5.00
葵花籽仁 51
1.8 47.5 10.4 3.0 86.5 2.42 4.84
米糠#
19
8.5 72.7 6.6
9.0 84.4 4.10 5.26
椰子干 65
2.0 33.0 4.5
3.5 93.0 3.36 10.40
油菜籽 36
( b ) 榨料实际压缩比( n )
— 榨料在压榨前后容积的比值。
n
Vj Vch
或
n
Kp
p
Ach Aj
n
Vj Vi
一些油料实际压缩比的参考值
入榨料坯
压榨饼
油料
含水 干物质
Sigmastar SSC338Q全功能开发板技术手册说明书

Sigmastar SSC338Q全功开发板技术手册一、应用场合:1. 适用于开发以下产品:(1)500万/800万网络摄像机。
(2)800万抓拍摄像机。
(3)安防监控产品。
(4)网络音视频产品。
(5)低功耗快速启动摄像机。
(6)4G/WIFI无线传输产品。
(7)编码器。
(8)双路摄像机。
(9)运动相机。
(10)航拍摄像机。
(11)UVC相机。
2. 适用于学习linux平台、熟悉ARM开发的开发者。
3. 适用于需要熟悉sigmstar平台音视频编解码、图像处理、UVC相机、4G/WIFI无线传输的开发人员。
二、型号:KF-QC38QCXX-AGWL-L2三、产品特色:■主控芯片采用Sigamastar高性能多媒体处理器片上系统(SOC),,内部集成双核A7和1个FPU、NEON,主频1GHz。
■支持WDR、多级降噪及多种图像增强和矫正算法,为客户提供专业级的图像质量。
■采用标准的H.264/H.265 High Profile压缩算法,方便在窄带上实现高清晰的图像传输。
■最大支持800万编码,最高支持3840x2160@20帧、2592x1944@30fps、2592x1520@40fps、2304x1296@60fps、2048x1536@60fps、1920x1080@80fps帧H.264/H.265编码。
■自带神经网络、深度学习算法,算力0.6T。
■支持双路sensor,每路最大500万像素。
■内置2Gb DDR3。
■支持MIPI、USB Sensor输入、图像质量优异。
■支持双向语音对讲。
■支持ONVIF2.4标准协议,可对接海康、大华、雄迈等NVR。
■支持GB28181协议。
■支持手机监看。
■支持4G全网通:5模或者7模。
■支持WIFI:热点和STA模式。
■支持GPS、北斗定位。
■支持POE供电,功率13W,符合IEEE802.3af/at标准■支持二次开发。
■尺寸26*24mm,邮票孔。
深圳迈卡数控技术 CHC-400 电容式高度控制器 说明书
CHC-400激光切割激光切割电容高度控制器电容高度控制器使用说明书使用说明书深圳迈卡特数控技术有限公司公司地址:深圳市宝安九区宝民一路白金酒店公寓519 公司电话:************* 传真:*************公司网址: Email :****************QQ :857950609目 录录一、 简介简介 (22)二、 技术指标技术指标 (33)三、 外形及安装外形及安装 (33)四、 操作面板及功能操作面板及功能 (66)五、 接口电路接口电路 (66)六、 调试调试 (7)七、 故障维护故障维护 (8)*使用调高器之前使用调高器之前,,请仔细阅读说明书请仔细阅读说明书**一、简介CHC-400 电容式高度控制器专用于激光切割。
有两种输出控制模式:第一种为模拟量输出,一般用来控制伺服驱动器,伺服驱动器工作在速度模式;第二种为单脉冲输出模式,一般用来控制步进驱动器。
CHC-400 电容式调高系统是一个闭环控制系统,它包括位置信号检测、信号处理变换、逻辑控制、驱动信号四个部分,适用于数控激光切割。
面板上有断线保护指示,割嘴碰撞指示及到位指示。
调高器可向数控系统准确地发出碰撞信号及到位信号,以便CNC实现全自动控制。
下图是CHC-400 电容高度控制器原理框图:激光切割割嘴为信号检测装置,割嘴与机床绝缘,通过同轴电缆连到割炬旁边的金属探头,用于感应割咀与钢板的高度,高度信号通过调高器内部处理后输出相应的控制信号,控制逻辑电路,再输出控制信号到伺服或步进驱动器,驱动调高电机正反向运转,最终实现自动调高。
二、技术指标供电电压:DC±15V ,各1A升降电机:交流伺服电机或步进电机输出电压:模拟量方式为DC±7V或步进方式为1KHz脉冲工作温度:调高器-10∽60℃,高频同轴电缆:-10∽200℃ 探头组件:-10∽350℃精度:±0.05mm精度内的调节范围:距工件表面1mm — 10mm高频电缆长度(HF-cable):500-1000mm主体外形尺寸(长X 宽X 高):150mmX133mmX47mm断线保护功能:HF 高频电缆部分三:外观及安装外观及安装1、 调高器外形视图调高器外形视图:下面分别给出调高器的前后盖前后盖前后盖贴膜图贴膜图贴膜图及安装图安装图安装图。
深圳市技卓 JZ893小功率无线数传模块 使用说明
JizhuoTechnology深圳市技卓科技有限公司JZ893小功率无线数传模块使用说明DVER2.0深圳市技卓科技有限公司电话:0755-83304518833084516131941161319410传真:(0755)83302824地址:深圳市福田区车公庙泰然科技园212栋811-813邮政编码:518040网址:http://www.jizhuo.comEMAIL:Sale@jizhuo.comJZ893小功率无线数传模块应用范围:功能特点:*水、电、煤气,暖气自动抄表收费系统*工作频率470-510MHz*智能无线PDA终端*传输距离4000米(1200bps)*无线排队设备*GFSK的调制方式*防盗报警*透明传输方式*智能卡*内置看门狗,以保长期可靠运行*医疗和电子仪器仪表自动化控制*UART/TTL、RS232、RS485接口*智能教学设备*方便、灵活的软件编程*家庭电器和灯光智能控制*超大的512bytes数据缓冲区*无线吊称,无线传输的电子称*适合内置式的安装JZ893数传模块是高集成度的小功率半双工的无线数传模块,其采用SI高性能射频芯片及高速单片机。
模块提供8个频道,并配备有专业的设置软件,以便用户进行参数更改,模块采用国家计量频段,透明传输的方式,无须用户编写设置与传输程序,即可进行传输任何大小的数据。
模块体积小,使用电压宽,方便使用。
JZ893无线数传模块,采用国家计量频段工作频率;可设置8个通信频道,发射功率为1W(30dB),高接收灵敏度-123dbm,体积58 mm*38mm*10mm(不含天线座),大量在工业控制现场,收费系统中使用,非常方便于用户做内嵌式无线系统。
JZ893采用透明传输方式,为了保证用户系统的可靠和稳定,在传输时加校验和或者CRC校验检错模式,对错误资料重发。
模块收发缓冲区达512bytes,意味着用户在任何状态下都可以1次传512bytes的数据,当设置为空中速大于串口速率时,理论上是可以发送无限长的资料包,但不建议用户发送太长的资料包,建议每包资料长度在60 ̄100B之间,一般不长于120B,同时建议用户程序采用ARQ的方式,对错误资料包进行重发。
zxg-3电脑控制定长控制器说明 - 软件版本

1 、霍尔 开 关应 安装在 与机 器 切刀 同步的 主轴上 ,要 求 与磁 钢保 持 2 - 4 毫 米( 见 下图 )注意 磁钢有 正背 面 方向 。
2、磁钢位置的调整: 2 -1 磁 钢1 :磁钢 1的 作 用为 步进电 机拖 料 ,调 整 此磁 钢1因使 切 刀 的 刀 口 刚好 张开至 可以 出 料时 磁 钢1与G K1 霍 尔开 关离开 。 2-2磁钢2:磁钢2的作用为控制主电机停止到切刀的最上位, 调 整 此 磁钢 2 因使 切刀即 将上 升 最上 位 时磁 钢2与 GK 1 霍尔 开 关 接 近 。 2-33磁钢3:磁钢3的作用为检测步进电机送料过程中是否切 刀 已 运 行 到 闭合 状态, 如果 切 刀闭 合时步 进电 机 仍然 送 料将 造 成 堵 料现 象 ,所 以用G K3 信 号通 知电脑 控制 器 限制 步 进电 机送 料 , 并用 液 晶显 示器提 示主 电 机超 速及停 止主 电 机。 调 整磁 钢 3 位 置 因使切 刀的 刀 口刚 好接近 闭合 时 磁钢 3与G K2 霍 尔开 关 接 近 。
R
ZXG-3型 电 脑 控 制 器 使 用 说 明 书 3 页
5 0、最 长工作 长度 : 设定 该数据 的大 小 可以 限 制工 作长度 的最 大 值 ( 即 菜单号 1的 值 )。 例:将 该数 据 设置 为1000mm,那么菜 单 号 1 的 设 定 长 度最 大 也只 为1000mm。 5 1、设置 皮棍 周 长: 根据机 器皮 棍 的周 长 输入 此参数 (单 位 :毫 米 ) 。 5 2、选择 步进 电 机或 伺服电 机: 该 控制 器 可以 选择 三 相 及二 相步 进 电 机或 伺 服 电 机作 为驱 动 ,若 选择二 相步 进 电机 时,该 控 制 器 适 合 匹 配 步 距 角 为 0.9度 的步进 电机 , 若选 择三相 步进 电 机 时 , 该 控 制 器 适 合 匹 配 步 距角 为0.6度 的步 进电机 ,若选 择 伺 服 电 机 时, 该控 制器将 要 求伺 服 电 机的 电子齿 轮为 5 00 个脉 冲 电 机 运 转一 圈 。 5 3、语言 选择 : 该控 制器的 液晶 显 示器 可 以选 择中文 显示 或 英文 显 示 。 5 4、速度 选择 : 指步 进电机 或伺 服 电机 加 减速 的速度 ,用 户 可根 据 机 器的 特 征相 应选择 快速 、 普通 、慢速 。
小刀黑鹰三代控制器针脚定义
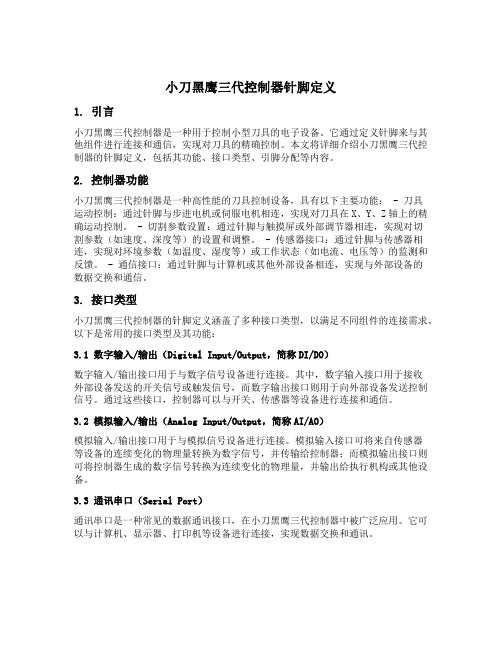
小刀黑鹰三代控制器针脚定义1. 引言小刀黑鹰三代控制器是一种用于控制小型刀具的电子设备。
它通过定义针脚来与其他组件进行连接和通信,实现对刀具的精确控制。
本文将详细介绍小刀黑鹰三代控制器的针脚定义,包括其功能、接口类型、引脚分配等内容。
2. 控制器功能小刀黑鹰三代控制器是一种高性能的刀具控制设备,具有以下主要功能: - 刀具运动控制:通过针脚与步进电机或伺服电机相连,实现对刀具在X、Y、Z轴上的精确运动控制。
- 切割参数设置:通过针脚与触摸屏或外部调节器相连,实现对切割参数(如速度、深度等)的设置和调整。
- 传感器接口:通过针脚与传感器相连,实现对环境参数(如温度、湿度等)或工作状态(如电流、电压等)的监测和反馈。
- 通信接口:通过针脚与计算机或其他外部设备相连,实现与外部设备的数据交换和通信。
3. 接口类型小刀黑鹰三代控制器的针脚定义涵盖了多种接口类型,以满足不同组件的连接需求。
以下是常用的接口类型及其功能:3.1 数字输入/输出(Digital Input/Output,简称DI/DO)数字输入/输出接口用于与数字信号设备进行连接。
其中,数字输入接口用于接收外部设备发送的开关信号或触发信号,而数字输出接口则用于向外部设备发送控制信号。
通过这些接口,控制器可以与开关、传感器等设备进行连接和通信。
3.2 模拟输入/输出(Analog Input/Output,简称AI/AO)模拟输入/输出接口用于与模拟信号设备进行连接。
模拟输入接口可将来自传感器等设备的连续变化的物理量转换为数字信号,并传输给控制器;而模拟输出接口则可将控制器生成的数字信号转换为连续变化的物理量,并输出给执行机构或其他设备。
3.3 通讯串口(Serial Port)通讯串口是一种常见的数据通讯接口,在小刀黑鹰三代控制器中被广泛应用。
它可以与计算机、显示器、打印机等设备进行连接,实现数据交换和通讯。
3.4 步进电机控制接口(Stepper Motor Control Interface)步进电机控制接口用于连接步进电机,通过控制电流和脉冲信号来实现精确的刀具运动控制。
GM338电台编程适配器的研制
— . .
C0 1 81
—
—
—
—
C0 43 8
.
.
E T K _ O J 8 卜 1 X _PC L 01 O
WARI S GM3 8 3 9 8 7 6 5 4 3 l 0 2 1
F 1A J8 卜1 Ll 01 —
R08 47
行 的位数据 ; 接收数 据 时 , 在 串行 的位 数据 被转 换为
字节 数据 。 R 一3 C采 用负 逻 辑 规 定 逻 辑 电平 , S2 2 电平 信 号 与通常 的 T L电平 信 号也 不兼 容 。R -3 C将 一5 T S2 2
~ 一
1 V 规定 为 “ ” + 5 + 1 V 规 定 为 “ ” 而 5 1, ~ 5 0。
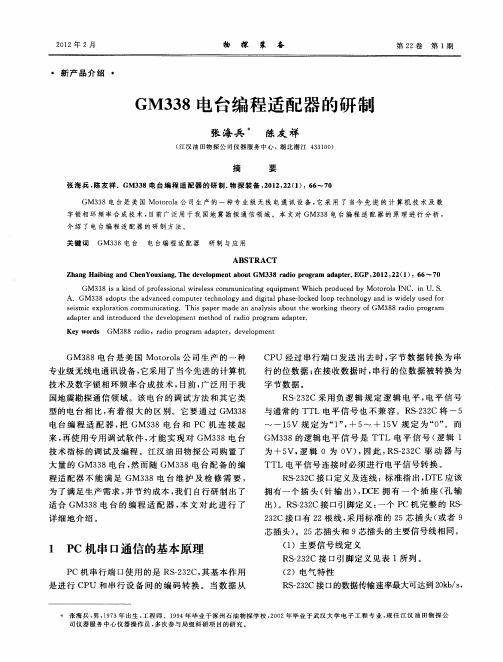
GM3 8电 台是 美 国 Moooa 司生 产 的一 种 专 业 级 无 线 电通 讯 设 备 , 采 用 了 当 今 先 进 的 计 算 机 技 术 及 数 3 trl 公 它
字锁 相环 频 率 合 成技 术 , 目前 广 泛 用 于 我 国地 震 勘 探 通 信 领 域 。本 文 对 GM3 8电 台编 程 适 配 器 的原 理 进 行 分 析 , 3
I
4F 4F 0 一p I 卒 I卒 7 7 2 4 0 p 0 p 7 p F 0 F— J
图 2 GM3 8电 台 串 口通 信 接 口 电路 3
6 8
物 探 装 备
21 : 0 2盘
图 3 GM3 8电 台 串行 通 讯 电路 3
34 G 3 . M3 8电台编 程适 配器 的电路 组成
21 年 2 02 月
物 探 装 备
第2卷 2
第i 期
志庆3款电机系统新产品

志庆3款电机系统新产品作者:来源:《中国自行车》2022年第03期MM18该款中置电机集成了高敏度的力矩传感器和速度传感器,采样到的曲柄力矩、整车速度、脚踏转动速度等多种信息被反馈给控制器,对整车实现精准控制,使能量效率发挥到极限,达到车随人愿、自由掌控的效果。
该款中置电机能够提供充足的动力性能,最大力矩可达100 N·m以上,但产生的噪音却很低。
控制器与电机的模块化设计,使得拆装更为方便,提高了服务响应速度。
主要规格安装位置:中置电机结构:齿轮传动额定电压:36 V/43 V/48 V空载转速:85( r/min)/100 (r/min)额定功率:250 W/350 W/500 W最大扭矩:100 N·m效率:80%助力传感器:速度与力矩传感器质量(重量):3.6 kgM58RD-X该款电机为后置驱动型,配碟刹使用,额定功率为350 W/750 W/ 1 000 W,减速比为1:5,最大扭矩为80 N·m,为车辆提供理想的动力,强劲、高效的特点,多级旋式和卡式变速机构,大幅度提升骑行舒适感,适合于沙滩车、雪地车。
主要规格安装位置:后置馬达结构:齿轮传动轮径:20″/26″/27.5″/28″额定电压:36 V/48 V额定功率:350 W/750 W/1 000 W时速:25~45 km最大扭矩:80 N·m效率:≥80%质量(重量):3.8 kgM30CD该款电机为后置驱动型,配碟刹使用,额定功率为250 W,最大扭矩为32 N·m,为车辆提供理想的动力。
该款电机具有强劲、高效的特点,结合卡式变速机构,大幅度提升骑行舒适感,适合于旅行车、通勤车、山地车。
主要规格安装位置:后置马达结构:齿轮传动轮径:20″/26″/27.5″/28″额定电压:24 V/36 V/43 V额定功率:180 W/250 W时速:25 km~32 km最大扭矩:32 N·m效率:≥80%质量(重量):2.6 kg。
西门子SM338快速入门
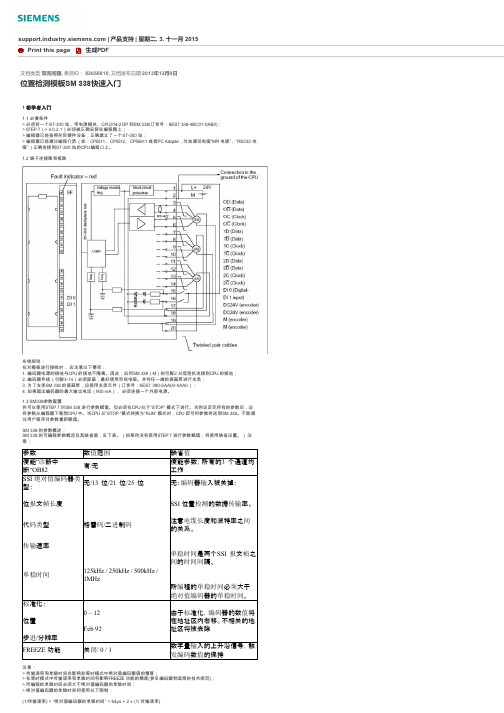
布线规则: 在对模板进行接线时, 应注意以下事项: 1. 编码器电源的接地与CPU 的接地不隔离。因此,应将SM 338(M)的引脚2 以低阻抗连接到CPU 的接地; 2. 编码器导线(引脚3-14)必须屏蔽,最好使用双绞电缆。并将任一端的屏蔽层进行支承; 3. 为了支承SM 338 的屏蔽层,应使用支承元件(订货号:6ES7 390-5AA00-0AA0); 4. 如果超出编码器的最大输出电流(900 mA), 必须连接一个外部电源。 1.3 SM338参数配置 你可以使用STEP 7 对SM 338 进行参数赋值。但必须在CPU 处于“STOP“ 模式下进行。当你设定完所有的参数后,应 将参数从编程器下载到CPU 中。当CPU 从“STOP “模式转换为“RUN“ 模式时,CPU 即可将参数传送到SM 338。不能通 过用户程序对参数重新赋值。 SM 338 的参数概述: SM 338 的可编程参数概述及其缺省值,见下表。(如果你没有使用STEP 7 进行参数赋值,将使用缺省设置。) 注 意:
注意: > 传输速率和单稳时间会影响非等时模式中绝对值编码器值的精度; > 在等时模式中传输速率和单稳时间将影响FREEZE 功能的精度( 参见编码器制造商的技术规范) ; > 所编程的单稳时间必须大于绝对值编码器的单稳时间; > 绝对值编码器的单稳时间将使用以下限制: (1/传输速率) < “绝对值编码器的单稳时间” < 64μs + 2 x (1/ 传输速率)
诊断报文 模板有问题 内部故障 外部故障 通道错误 外部辅助电源故障 模板没有参数化 参数错误 通道信息可用 触发监测 通道错误 组态/参数赋值出错 外部通道错误(编码器错误)
10.5 故障原因及排除
LED SF SF SF SF SF SF SF SF SF SF SF SF
电机参数
4 0.6
2 0.3
0
0
0
0 (0)
驱动器输入电流
fs 500
1000 转速 [r/min]
2
4
(4)
(8)
脉冲频率 [kHz]
1500
2000 6 分割数 1 (12() 分割数 2)
0
0
0
fs
500
1000
1500
2000
2500
转速 [r/min]
0
2
4
6
8 分割数 1
(0)
(4)
(8)
(12)
(16() 分割数 2)
脉冲频率 [kHz]
CMK256AP/CMK256BP
电源电压:DC24V 设定电流:2.0A/相(2 相励磁时) 带制振器 D6CL-6.3F:JL=140×10–7kg·m2 0.8
系统构成
种类
规格·特性
外形图
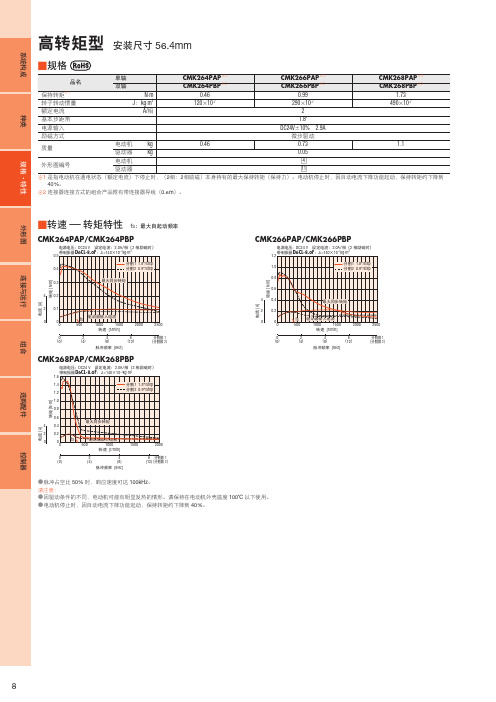
高转矩型 安装尺寸 56.4mm
Ⅵ规格
品名
单轴 双轴
CMK264PAP ˞ 2 CMK264PBP ˞ 2
CMK266PAP ˞ 2 CMK266PBP ˞ 2
CMK268PAP ˞ 2 CMK268PBP ˞ 2
保持转矩˞ 1
N·m
0.46
0.99
1.73
转子转动惯量
J:kg·m2
0.6 最大同步转矩
分割数1 1.8°/step 分割数2 0.9°/step
8 0.4
电流 [A] 转矩 [N·m]
4 0.2
驱动器输入电流
0
0
0
0 (0)
fs
500
1000
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
十 二、应用例举:
信号拾取
清零/停止
220V 220V
电 源 AC220V 常开触点
ZX-338
常开触点 启动
1 2 3 4 5 6 7 8 9 10
输出 12V
220V 220V
电源
ZX-338
输出 12V
地 址:浙江省瑞安市经济开发区朝阳路87号 电 话:0577-65608165 65608162 网 址:WWW.ZXTEC.CN
ZX-338 P2
三、输入信号拾取方法:
长度控制器要求霍尔开关拾取的转数,拾取结构因机器的 不同而有不同的方法,要求是,该结构能准确反映出料,不能 有打滑、空转现象。 示图意:
长度
+ -
L
显示原来的长度值
并闪烁提示更改位
000012 单位:米
L 按+或-开关
000011 修改步长值
步长 感应点,如粘上磁片
六、面板按键及参数设置:
89
提前 长度 + - /清零
6-1 设置步长:
二、主要技术参数:
按5秒
+ -
P
显示原来的步长值 并闪烁提示更改位
0.0555 单位:米
同时按
1、范围: 长 度 测 量 0 - 9 9 9 999米 速度测量0-999米/分
6-4 设置时间:
A
显示原来的长度值
并闪烁提示更改位
0 005 单位:米
8-1 设置步长: 设 置步长的数据是根据使用机器环境而定,详见说明4、5。 8-2 设置长度:
A 按+或-开关
0006 修改步长值
指人为设定的控制长度,控制器拾取信号而累加长度,当累加 长度到设置长度时长度继电器输出(输出方式由设置时间而定,详 见8-4设置时间),当设置长度等于0时长度继电器输出无效。
提前 长 度 + - /清 零
ZHONG XING
96
92
五、线速度计算方法:
控制器拾取霍尔开关信号的间隔时间,通过电脑计算得到转速 再乘以步长值便得到线速度。由于线速度是由输入信号的间隔时间 计算出,所以要求每个步长尽量等分,若只用一个磁钢则不影响线 速度的精度。
面 板 开 孔 尺 寸
+ -
P 按+或-开关
0.0556 修改步长值
2、误差 正负一个脉冲
3、最高输入频率 小于50赫兹 4、输入接口 霍尔开关或接近开关 5、输出接口 两个继电器(220V/0.5A)
12V CP1 0V 12V CP2 0V 12V CP3 0V 空
11 12 13 14 15 16 17 18 19 20
12V鸣蜂器
电动机
段速
变 控制
输
频
出
运行
器 停止
ZX-338不仅可以控制变频器,同理也可以控制直流 电机以及滑差电动机。详情请致电咨询。
长度速度 外接清零 外 接 信号输入 停止输入 启动输入
A 按清零开关
0 006 选择更改位
8-3 设置提前: 指 设置长度数提前的数量(既设置长度减设置提前数等于的长
度)。当控制器累加长度到此值时提前继电器输出,待累加长度到 设置长度时关闭输出。
0000.00
储存数据并
U00 00 返回运行状态
8-4 设置时间: 指 控制器累加长度到设置长度时长度继电器输出的动作时间。
磁钢
2-3MM
霍尔开关
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
L 按清零开关
000011 选择更改位
0000.00
储存数据并
U00 00 返回运行状态
ZX-338 P 1
R
瑞安市中星工控设备有限公司
6-3 设置提前:
八、参数与输出的关系:
提前
+ -
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
0000.00
储存数据并
U00 00 返回运行状态
7、停电处理 停电储存数据大于5年
8、工作电源 交流220V 50/60HZ 6-2 设置长度:
P 按清零开关
0.0556 选择更改位
一个晶体管(12V/50MA) 6、预置编程控制 长度到值继电器输出 长度提前到值继电器输出 提前长度3米晶体管循环输出
R
瑞安市中星工控设备有限公司
ZX-338 预置编程型长度与速度控制器参数及使用说明
一、型式: 本 品为面板安装式长度与速度综合控制器,长度项具备预置输
出功能,适用于产业机械长度控制及速度指示。安装尺寸如下:
96
92
四、长度采集方法:
控制器采用设置步长累加法计算长度,霍尔开关每产生一个脉 冲信号,控制器加一个步长值。步长值因机器安装工况不同,为提 高精度,要求步长越短越好。如说明3所示,在滚筒端面上装上4个 感应点,时滚筒周长4等分,来缩短步长。
倍数后关闭,以此循环输出。
+ -
d
按+或-开关
0.6修 改步长值
十、外接启动开关:
当外接启动开关输入信号时,长度继电器将长期输出至累加长 度到达设置长度或按清零开关时关闭输出。
1 2 3 4 5 6 7 8 9 10
12V CP1 0V 12V CP2 0V 12V CP3 0V 空
当设置时间等于0时,长度继电器长期输出累加长度继续,只有按
清零开关时才关闭长度继电器及清除累加长度。当设置时间不等于
0时,长度继电器按设置的时间动作同时清除累加长度。
长度
d 按5秒
显示原来的时间值 并闪烁提示更改位
0.5单 位:米
九、蜂鸣器输出: 蜂 鸣器输出始终以设置长度的倍数提前3米输出,到设置长度
11 12 13 14 15 16 17 18 19 20
当显示的长度符合要 求时,等待5秒钟系统 将保存数据。
d
按清零开关
0.6选 择更改位
0000.00
储存数据并
U00 00 返回运行状态
七、接线引脚功能:
蜂鸣器 电 源 长度继电器 提前继电器 输 出
十一、清零: 在 任何时候按清零开关或者外接清零开关时,长度控制器将清