关于恒温热线风速仪的研究
三种风速测量仪介绍及其原理 测量仪工作原理
三种风速测量仪介绍及其原理测量仪工作原理1、热式风速仪将流速信号变化为电信号的一种测速仪器,也可测量流体温度或密度。
其原理是,将一根通电加热的细金属丝(称热线)置于气流中,热线在气流中的散热量与流速有关,而散热量导致热线温度变化而引起电阻变化,流速信号即变化成电信号。
它有两种工作模式:①恒流式。
通过热线的电流保持不变,温度变化时,热线电阻更改,因而两端电压变化,由此测量流速。
②恒温式。
热线的温度保持不变,如保持150℃,依据所需施加的电流可度量流速。
恒温式比恒流式应用更广泛。
热线长度一般在0.5~2毫米范围,直径在1~10微米范围,材料为铂、钨或铂铑合金等。
若以一片很薄(厚度小于0.1微米)的金属膜代替金属丝,即为热膜风速仪,功能与热丝相像,但多用于测量液体流速。
热线除一般的单线式外,还可以是组合的双线式或三线式,用以测量各个方向的速度重量。
从热线输出的电信号,经放大、补偿和数字化后输入计算机,可提高测量精度,自动完成数据后处理过程,扩大测速功能,相像时完成瞬时值和时均值、合速度和分速度、湍流度和其他湍流参数的测量。
热线风速仪[1]与皮托管相比,具有探头体积小,对流场干扰小;响应快,能测量非定常流速;能测量很低速(如低达0.3米/秒)等优点。
当在湍流中使用热敏式探头时,来自各个方向的气流同时冲击热元件,从而会影响到测量结果的精准性。
在湍流中测量时,热敏式风速仪流速传感器的示值往往高于转轮式探头。
以上现象可以在管道测量过程中察看到。
依据管理管道紊流的不同设计,甚至在低速时也会显现。
因此,风速仪测量过程应在管道的直线部分进行。
直线部分的起点应至少在测量点前10D(D=管道直径,单位为CM)外;尽头至少在测量点后4D处。
流体截面不得有任何遮挡(棱角,重悬,物等)。
2、叶轮风速仪风速计的叶轮式探头的工作原理是基于把转动转换成电信号,先经过一个靠近感应开头,对叶轮的转动进行“计数” 并产生一个脉冲系列,再经检测仪转换处理,即可得到转速值。
热线风速仪测量速度的原理

热线风速仪测量速度的原理
1.施加恒定电流:将恒定电流通过热线风速仪的细丝。
2.测量初始温度:在恒定电流通过细丝之前,测量细丝的初始温度。
3.测量改变的电阻:恒定电流通过细丝后,细丝会因为周围气流的冷
却效应而改变温度。
这导致热电阻的电阻值发生变化。
4.计算电流和电阻的关系:通过测量电流和电阻的变化,可以根据热
导热定律计算出细丝的冷却速率。
5.计算气流速度:通过测量细丝的冷却速率,可以计算出周围气流的
速度。
当细丝周围的空气流速增大时,细丝的热量散失速率也会增加。
这会
导致细丝的温度下降,进而改变热电阻的电阻值。
通过测量电阻值的变化,可以计算出细丝的冷却速率,从而确定周围气流的速度。
为了提高测量的准确性,热线风速仪通常采用细丝冷却速率和气流速
度之间的标定系数。
这需要在实验室条件下进行多次校准,以确保测量的
准确性和可靠性。
总之,热线风速仪利用热导热定律的原理测量空气流速。
通过测量细
丝的冷却速率,可以计算出空气流速。
这种测量方法简单而精确,常用于
气象、空调、风洞等领域中对气流速度的测量。
热线风速仪测量原理简介

热线风速仪测量原理简介朋友!今天咱们来聊一聊一个挺神奇的玩意儿——热线风速仪。
你可别小看它,这小家伙在测量风速这方面可是有着独特的本事呢!那啥是热线风速仪呢?简单来说呀,它就像是一个风速界的“小侦探”,专门负责打探风的速度。
它的原理呢,还挺有趣的。
想象一下,风就像是一群调皮的小精灵,在空气中跑来跑去。
而热线风速仪呢,就是要抓住这些小精灵的“行踪”,搞清楚它们到底跑得有多快。
热线风速仪里面有个很关键的东西,叫热线。
这根热线啊,就像是一个超级敏感的“小触角”。
当有风吹过来的时候,风会把热线周围的热量给带走。
这就好比你在冬天,手伸到外面,风一吹,手上的热量就被吹跑了,会觉得很冷,热线也有类似的感受哦。
风越大呢,它带走热线热量的速度就越快。
这时候,热线的温度就会下降得比较厉害。
而热线风速仪呢,就像是一个聪明的“小管家”,它能敏锐地察觉到热线温度的变化。
它通过一个小小的电路系统,来测量热线温度的改变。
比如说,当风比较小的时候,热线的温度下降得就比较慢,电路系统检测到的温度变化就不大。
就好像是微风轻轻拂过,只是轻轻地带走了一点点热量,热线还不至于“着凉”。
可是当大风呼呼刮起来的时候,那可就不一样啦!热线周围的热量被风迅速地带走,温度一下子就降下来了,电路系统马上就能察觉到这个明显的变化。
然后呢,这个聪明的“小管家”会根据热线温度的变化,通过一些复杂但又很神奇的计算方法,把它转换成风速的数值。
就像是一个神奇的“翻译官”,把热线感受到的温度变化“翻译”成我们能看懂的风速大小。
你知道吗?热线风速仪的这个测量过程,就像是一场风与热线之间的“较量”。
风想偷偷溜走,不留下一点痕迹,可热线却紧紧地“盯着”它,不放过任何一个细节。
而热线风速仪的整个系统,就像是一个默契十足的团队,每个部分都在各司其职,共同完成测量风速的任务。
而且啊,热线风速仪还有很多优点呢。
它的反应速度特别快,就像是一个身手敏捷的运动员,风稍微有点变化,它就能立刻察觉到。
恒温热线风速仪的一种新型校准方法

恒温热线风速仪的一种新型校准方法作者:姚惠元刘国政孙楠董军来源:《现代电子技术》2013年第23期摘要:恒温热线风速仪作为一种风洞流场测量元件,在湍流脉动测速任务中发挥了重要作用。
对热线风速仪的校准工作进行了研究,将B样条与递推最小二乘相结合,提出了一种新型校准方法。
该方法选取具有低阶光滑特性的B样条函数进行逆向建模,并采用递推最小二乘的方法估计控制参数,有效地提高了校准精度和实时性。
通过对实际风洞实验的数据分析,验证了提出的该校正方法的有效性,并表明其具有样本点少、校正精度高、简单实用等显著优点。
关键词:热线风速仪;校准; B样条;递推最小二乘方法中图分类号: TN710⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)23⁃0110⁃03 A new calibration method of constant temperature hot wire anemometerYAO Hui⁃yuan, LIU Guo⁃zheng, SUN Nan, DONG Jun(AVIC Aerodynamics Research Institute, Heilongjiang 150001, China)Abstract: As a flow field measuring elements for wind tunnel, the constant temperature hot wire anemometer plays an important role in the measurement of turbulent fluctuation task. The calibration of the hot wire anemometer is studied. Using the B⁃spline and recursive least squares as a combination, a new calibration method is proposed, which chooses B⁃spline function with low order smooth characteristics for reverse modeling, and estimates the control parameters using the method of recursive least squares. The method effectively improved the calibration accuracy andreal⁃time. Through the analysis of wind tunnel experimental data, the effectiveness of the correction method is validated. The experiment shows that it has the advantages of fewer sample points, higher correction accuracy, simple and useful.Keywords: hot wire anemometer; calibration; B⁃spline; recursive least⁃square algorithm0 引言热线测速作为一种重要的流体测量技术,已经有100多年的研究历史,其在测量湍流脉动速度任务中发挥着巨大的作用[1]。
热线风速仪的传热学原理研究
热线风速仪的传热学原理研究沈欢北京大学工学院,北京1008712012年5月24日摘要本文深入讨论了热线风速仪的传热学原理,给出了具体的工程实现方案。
1热线风速仪简介热线风速仪是一种利用传热学原理准确测量风速的仪器,己经有近一百年的历史,它为流体速度的测量作出了巨大的贡献,并且在20世纪60年代以后几乎垄断了湍流脉动测速领域。
按照热线热平衡原理可以将热线分为恒流风速计和恒温风速计。
由于恒温风速计热滞后效应很小,频率响应很宽,反应快速,而恒流风速计则不具备上述特点,因此,恒温风速计的出现成为热线技术进一步发展的重要标志。
热线风速仪器测量速度的基本原理是热平衡原理,利用放置在流场中的具有加热电流的细金属丝来测量流场中的流速。
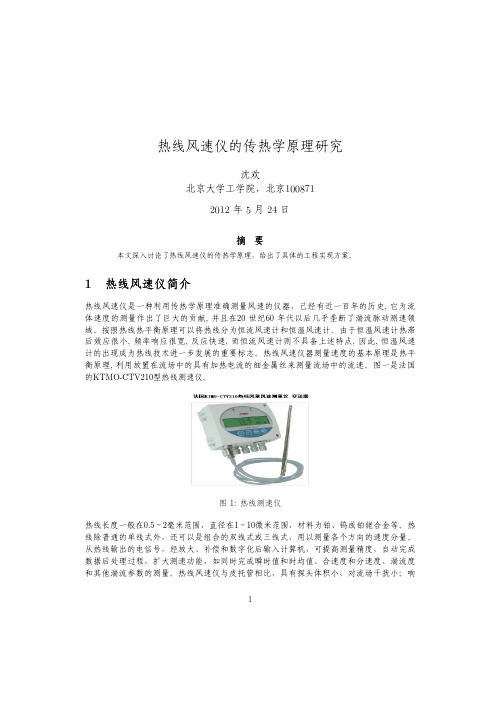
图一是法国的KTMO-CTV210型热线测速仪。
图1:热线测速仪热线长度一般在0.5~2毫米范围,直径在1~10微米范围,材料为铂、钨或铂铑合金等。
热线除普通的单线式外,还可以是组合的双线式或三线式,用以测量各个方向的速度分量。
从热线输出的电信号,经放大、补偿和数字化后输入计算机,可提高测量精度,自动完成数据后处理过程,扩大测速功能,如同时完成瞬时值和时均值、合速度和分速度、湍流度和其他湍流参数的测量。
热线风速仪与皮托管相比,具有探头体积小,对流场干扰小;响1应快,能测量非定常流速;能测量很低速(如低达0.3米/秒)等优点。
可测量的最低风速能达到0.05m/s,最高风速可达到30m/s以上,低风速时分辨率可以达到0.01m/s,所以它可以用来测量各种风速,尤其在低风速测量中有着不可替代的作用。
现在生产的热式风速仪样式更加简洁,准确度更高,携带使用也更加方便。
广泛应用于采暖、通风、空气调节、环境保护、节能监测、气象、农业、冷藏、干燥、劳动卫生调查、洁净车间、化纤纺织、各种风速实验室等方面。
2热线风速仪的传热学基本原理本文仅讨论现在流行的恒温式热线风速仪用于测量普通流场(室温、低速、稳定)流速的情况,不涉及变温流场和高速流场。
热线风速仪制作的初步研究

热线风速仪制作的初步研究
陆青松;王元
【期刊名称】《南京建筑工程学院学报》
【年(卷),期】2002(000)003
【摘要】从热线风速仪最基本的原理出发,在借鉴国外做法的基础上,对热线风速仪的制作及调试作了一些初步的探索性工作.通过实验验证了自制的热线风速仪具备良好的测量性能,能够用于紊流的研究.
【总页数】5页(P62-66)
【作者】陆青松;王元
【作者单位】南京工业大学,城市建设与安全环境学院,江苏南京,210009;西安交通大学,流体工程系,陕西,西安,710049
【正文语种】中文
【中图分类】TK313
【相关文献】
1.圆柱覆膜热线风速仪气动加热数值研究 [J], 夏子龙;王锁芳
2.微风速标准装置的建立和热线风速仪校准方法的实验研究 [J], 崔骊水;李鹏;邱丽荣;李建双
3.热线风速仪低温测速的初步研究 [J], 王仑;周远;候宇葵
4.用热线风速仪测量内燃机缸内流场时热线探针的方向敏感性研究 [J], 沈祖京
5.圆柱覆膜热线风速仪气动加热数值研究 [J], 夏子龙;王锁芳;;;;
因版权原因,仅展示原文概要,查看原文内容请购买。
热线风速仪测量速度的原理

热线风速仪测量速度的原理热线风速仪是一种通过测量风速的仪器。
它根据导热原理,利用金属薄丝受流体流过的冷却效应来测量风速。
以下是2000字详细介绍热线风速仪测量速度的原理:第一部分:导热原理介绍导热原理是热线风速仪测量速度的基础原理。
导热是物质中热能传导的过程,即热量沿着温度梯度传递的现象。
导热是由于物质微观粒子之间碰撞的结果,热能从高温物体传导到低温物体。
第二部分:热线风速仪工作原理热线风速仪通常由两根金属薄丝组成,一根薄丝作为传感器,另一根薄丝作为恒温器。
传感器薄丝呈细长线状,其中央部分放置在测量风速的场合中,一端固定,另一端连接到电路。
恒温器薄丝是用于维持传感器薄丝的温度恒定。
第三部分:传感器薄丝工作原理当风流通过传感器薄丝时,风流中带有的能量将通过传感器薄丝上的传热效应被吸收。
传感器薄丝长度的一小段附近的温度将下降,且下降的趋势随着流过薄丝的速度而增加。
这是因为风速越快,冷却效应越明显。
第四部分:温度测量为了测量传感器薄丝的温度变化,电路通过传感器薄丝上建立电流。
当风流通过传感器薄丝时会吸收部分热量,因此传感器薄丝上的温度会降低,导致电阻变化。
通过电阻的变化,可以通过电路测量出传感器薄丝的温度变化,从而得到风速的信息。
第五部分:恒温器薄丝工作原理恒温器薄丝是用来维持传感器薄丝的温度恒定的。
恒温器薄丝中通过电流,通过与传感器薄丝相同的原理进行工作。
但是,恒温器薄丝的电阻更大,以保持其温度变化更小。
因此,当传感器薄丝的温度变化时,电路将自动调整电流,使恒温器薄丝的温度保持稳定。
第六部分:校准和计算为了得到精确的风速测量结果,需要进行校准和计算。
校准过程可以通过人为设定不同风速下的标准值进行。
根据不同的风速和传感器薄丝的温度变化,可以建立风速和温度变化之间的关系。
然后,根据测量到的传感器薄丝的温度变化,可以通过定义好的关系来计算出实际的风速。
总结:热线风速仪利用导热原理测量风速,通过传感器和恒温器薄丝对风速进行测量。
关于恒温热线风速仪的研究

关于恒温热线风速仪的研究作者:A.E.PERRY和G.L.MORRISON 澳大利亚墨尔本大学机械工程系(1970年4月14日收到)对于普通的“反馈放大桥式”恒温热线风速仪,通过研究,我们已经算出它的静态及动态响应。
在本文中,反馈放大增益处于中等水平、桥的不平衡影响、桥的响应偏离影响、放大补偿电压影响、缺乏共模抑制影响、频率响应放大器影响和常量跨导影响均包括在内,根轨迹的系统映射出来结果的分析从操笔者及设计者的观点都做了讨论。
1:介绍热线风速仪是校准静态及测量高频成分成分大小的工具,实验者如何知道仪器在高频率下是否正常工作的唯一途径就是在这些频率下做出电压激励,这很困难难而且不方便。
除此之外,系统响应可以由直接电路测试,比如从一个外部电压源对系统激励的得出。
但从实验者的观点来看,这是无法令人满意的。
尤其是当一个人缺少对电路系统的综合考虑的时候。
商业运作指导手册不会对仪器提供的进程有指导的。
因此,几乎没有用户相信结果。
人们对于热线风速仪的不满意让笔者更明显的认识到,他们在用不同的热线系统测量同样的速度(20%不同)时在动荡程度上缺少一致性,而且在保持系统稳定上非常困难。
对于这些问题,学者们执行了一项详细的研究,这份报告就是描述的研究的第一个阶段。
主要关注的是标准桥式电路和反馈放大系统的响应。
随着价格低、漂移小的可用于实用综合电路形式的放大器的普及,对于非电子专家也可以很容易地构建自己的热线风速仪。
笔者希望,这份报告可以提供各种对系统正确操作和校准的方法。
过去,人们总是设计系统逼近热线保持恒温的明显的理想情况(因此它的名字就叫恒温热线风速仪),在这些情况下,热线保持着特定的温度变化方式,这种变化方式我们是知道的。
但是在实际情况下,热线的温度绝不会真正的恒定,即使是系统校准得非常好,温度的变化也必须考虑。
人们利用教高放大增益在非常小的范围内试图保持热线温度恒定,但这样会导致平衡问题。
利用更高的放大增益激励和因此产生的热线电阻是:(1)系统的分析被大大简化了;(2)认为高频率响应就是结果。
热线风速仪的工作原理

热线风速仪的工作原理热线风速仪是一种常用的测量风速的仪器,它通过测量风的流动对热线的冷却效应来计算风速。
它的工作原理非常简单,但却非常有效。
热线风速仪通常由一个细长的热丝(也称为热线)和一个温度传感器组成。
这个热丝通常是由金属或陶瓷制成的,具有较高的电阻率。
当电流通过热丝时,它会发热,产生一定的热能。
当热丝处于静止空气中时,它的温度会逐渐升高,并达到一个稳定状态。
这时,温度传感器会检测到热丝的温度,并将其转化为电信号。
根据热丝的温度和电阻的关系,可以计算出热丝的电阻值。
然而,当热丝暴露在流动的空气中时,会发生不同的情况。
流动的空气会带走热丝周围的热量,使热丝的温度降低。
由于热丝的电阻与温度成正比,因此电阻值也会随之下降。
热线风速仪通过测量热丝的电阻变化来计算风速。
当热丝暴露在流动的空气中时,它的电阻会随着风速的增加而下降。
根据热丝的电阻变化和预先测定的热丝特性曲线,可以确定风速的大小。
为了提高测量的准确性,热线风速仪通常会进行自校准。
它会在测量之前先将热丝加热到一个已知的温度,然后再测量热丝的电阻值。
通过比较测量值和已知值的差异,可以对热丝的特性进行校正,从而提高测量的精度。
热线风速仪的工作原理基于热传导的基本原理。
当热丝处于静止空气中时,热量通过传导的方式传递给周围的空气。
而当热丝暴露在流动的空气中时,热量的传递速度会增加,导致热丝的温度降低。
通过测量热丝的电阻变化,热线风速仪可以准确地计算出风速的大小。
不仅如此,热线风速仪还可以测量非常小的风速,因为热丝的电阻值与风速的变化呈线性关系。
总的来说,热线风速仪是一种简单而有效的测量风速的仪器。
它的工作原理基于热传导的原理,通过测量热丝的电阻变化来计算风速的大小。
通过自校准和精确的测量方式,热线风速仪可以提供准确可靠的风速数据,广泛应用于气象、航空、环境监测等领域。
三种风速测量仪介绍及其工作原理
三种风速测量仪介绍及其工作原理1、热式风速仪将流速信号转变为电信号的一种测速仪器,也可测量流体温度或密度。
其原理是,将一根通电加热的细金属丝(称热线)置于气流中,热线在气流中的散热量与流速有关,而散热量导致热线温度变化而引起电阻变化,流速信号即转变成电信号。
它有两种工作模式:①恒流式。
通过热线的电流保持不变,温度变化时,热线电阻改变,因而两端电压变化,由此测量流速。
①恒温式。
热线的温度保持不变,如保持150①,根据所需施加的电流可度量流速。
恒温式比恒流式应用更广泛。
热线长度一般在0.5~2毫米范围,直径在1~10微米范围,材料为铂、钨或铂铑合金等。
若以一片很薄(厚度小于0.1微米)的金属膜代替金属丝,即为热膜风速仪,功能与热丝相似,但多用于测量液体流速。
热线除普通的单线式外,还可以是组合的双线式或三线式,用以测量各个方向的速度分量。
从热线输出的电信号,经放大、补偿和数字化后输入计算机,可提高测量精度,自动完成数据后处理过程,扩大测速功能,如同时完成瞬时值和时均值、合速度和分速度、湍流度和其他湍流参数的测量。
热线风速仪[1]与皮托管相比,具有探头体积小,对流场干扰小;响应快,能测量非定常流速;能测量很低速(如低达0.3米/秒)等优点。
当在湍流中使用热敏式探头时,来自各个方向的气流同时冲击热元件,从而会影响到测量结果的准确性。
在湍流中测量时,热敏式风速仪流速传感器的示值往往高于转轮式探头。
以上现象可以在管道测量过程中观察到。
根据管理管道紊流的不同设计,甚至在低速时也会出现。
因此,风速仪测量过程应在管道的直线部分进行。
直线部分的起点应至少在测量点前10×D(D=管道直径,单位为CM)外;终点至少在测量点后4×D处。
流体截面不得有任何遮挡(棱角,重悬,物等)。
2、叶轮风速仪风速计的叶轮式探头的工作原理是基于把转动转换成电信号,先经过一个临近感应开头,对叶轮的转动进行“计数” 并产生一个脉冲系列,再经检测仪转换处理,即可得到转速值。
热线风速仪器
(1)
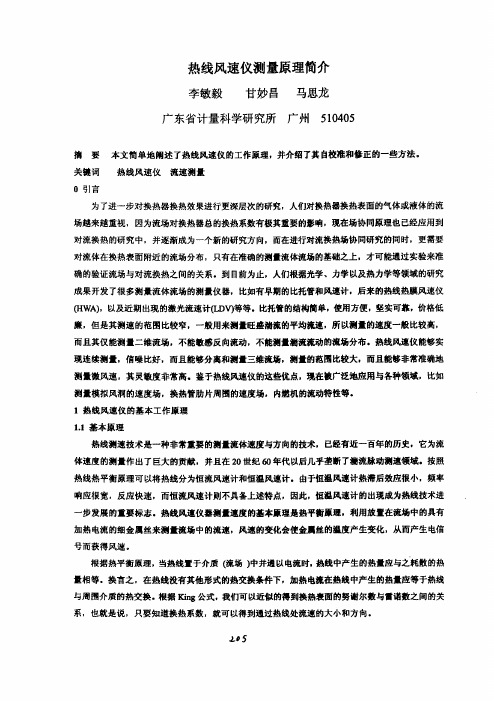
恒温工作模式下热线的温度为300C,金属丝 和外界的辐射热交换可以忽略。
对流是自然对流和强迫对流两过程复合作用 结果。决定哪种对流占据主要状态的因素是 速度的大小
图一,热线热平衡示意图
当 Re 2 Gr (葛拉晓夫数)自然对流就不能忽略,这个条件对气体 而言,流速在0.5m/s~1m/s之间。
2 w w w f A,B是物性参数决定的常数,其中
I R T T )A B U ) ( (
(4)
Rw R f (1 f (Tw T f ))
f 是温度为Tf时的金属丝电阻温度系数,Rf是温度为Tf时的金属丝电阻值。
Tw T f Rw R f
热线的静态方程
测试理论与仪器仪表
Hot-Wire Anemometry
第五章,速度测量
刘明侯
中国科学技术大学 热科学与能源工程系
大小
方向
•皮托管
• 热线风速仪(HWA,Hot wire Anemometry) • 激光多普勒测速仪(LDV,PDPA) • 粒子成像测速系统(PIV)
h
速度测量手段
Velocity
Nu A B Re
n
Nu
d f
f (V , d , , f )
热线热平衡方程描述为:
2 Q F (Tw Tf ) I w Rw
金属丝换热的影响因素
• 流动速度V • 金属丝与气体之间的温度差(Tw-Tf) • 气体的物理性质 •金属丝的几何尺寸与物理性质
f Rf
I
2 w
f R f Rw
Rw R f
A B U
5-4 热线的动态响应
热线风速仪测量速度的原理

热线风速仪测量速度的原理热线风速仪是一种用于测量风速的仪器,它基于热线测量原理进行工作。
热线风速仪通过测量风流中的热量传递来确定风速大小。
下面将详细介绍热线风速仪的工作原理和测量过程。
热线风速仪的核心组件是一个细丝状的加热器件,通常采用铂丝或镍丝制成,被称为热线。
当电流通过热线时,热线表面会产生一定的热量。
当热线被置于风流中时,风流会带走热量,导致热线的温度下降。
热线风速仪通过测量热线冷却速度来确定风速大小。
当风速较低时,热线冷却速度较慢,因为风流带走的热量较少。
而当风速较高时,热线冷却速度较快,因为风流带走的热量较多。
通过测量热线冷却速度的变化,可以得到风速的大小。
具体的测量过程如下:首先,将热线风速仪放置在待测的风流中,使热线暴露在风流中。
然后,通过加热热线,并测量热线的温度。
接下来,停止加热热线,开始测量热线的冷却速度。
热线的冷却速度可以通过测量热线温度的变化率来确定。
最后,通过将热线的冷却速度与预先校准好的标准曲线进行比较,可以得到风速的大小。
热线风速仪的测量精度受到多种因素的影响,主要包括热线的材料、长度和直径,以及环境温度和湿度等因素。
为了提高测量精度,热线风速仪通常需要进行校准。
校准过程中,需要将热线风速仪与已知风速的标准仪器进行比对,以确定热线风速仪的测量误差,并进行相应的校正。
热线风速仪具有许多优点,例如快速响应速度、高测量精度和宽测量范围等。
它可以广泛应用于气象学、环境监测、航空航天等领域。
同时,热线风速仪还可以与其他仪器或设备进行集成,实现更复杂的测量和控制功能。
总结起来,热线风速仪通过测量风流中的热量传递来确定风速大小。
它通过加热热线并测量热线的冷却速度来进行测量。
热线风速仪具有快速响应速度、高测量精度和宽测量范围等优点,可以广泛应用于各个领域。
但是在使用时需要注意热线风速仪的校准和环境因素对测量结果的影响。
热线风速仪测量原理简介
热线风速仪测量原理简介李敏毅甘妙昌马思龙广东省计量科学研究所广州510405摘要本文简单地阐述了热线风速仪的工作原理。
并介绍了其自校准和修正的一些方法。
关键词热线风速仪流速测量0引言为了进一步对换热器换热效果进行更深层次的研究,人们对换热器换热表面的气体或液体的流场越来越重视.因为流场对换热器总的换热系数有极其重要的影响,现在场协同原理也已经应用到对流换热的研究中。
并逐渐成为一个新的研究方向,而在进行对流换热场协同研究的同时,更需要对流体在换热表面附近的流场分布,只有在准确的测量流体流场的基础之上。
才可能通过实验来准确的验证流场与对流换热之间的关系.到目前为止,人们根据光学、力学以及热力学等领域的研究成果开发了很多测量流体流场的测量仪器,比如有早期的比托管和风速计。
后来的热线热膜风速仪mwrA),以及近期出现的激光流速计(LDV)等等.比托管的结构简单,使用方便,坚实可靠,价格低廉,但是其测速的范围比较窄,一般用来测量旺盛湍流的平均流速。
所以测量的速度一般比较高.而且其仅能测量二维流场,不能敏感反向流动,不能测量湍流流动的流场分布.热线风速仪能够实现连续测量,信噪比好,而且能够分离和测量三维流场,测量的范圈比较大.而且能够非常准确地测量微风速。
其灵敏度非常高.鉴于热线风速仪的这些优点,现在被广泛地应用与各种埙域.比如测量模拟风洞的速度场,换热管肋片周围的速度场。
内燃机的流动特性等.1热线风速仪的基本工作原理1.1基本原理热线测速技术是一种非常重要的测量流体速度与方向的技术,已经有近一百年的历史,它为流体速度的测量作出了巨大的贡献.并且在20世纪∞年代以后几乎垄断了溜流脉动测速领域.按照热线热平衡原理可以将热线分为恒流风速计和恒温风速计.由于恒温风速计热滞后效应报小,频率响应很宽,反应快速,而恒流风速计则不具备上述特点,因此,恒温风速计的出现成为热线技术进一步发展的重要标志.热线风速仪嚣测量速度的基本熏理是热平衡原理。
热线风速仪制作的初步研究

摘 要 : 热 线 风 速 仪 最 基 本 的 原 理 出 发 , 借 鉴 国 外 做 法 的基 础 上 , 热 线 风 速 仪 的 从 在 对 制 作 及 调 试 作 了 一 些 初 步 的 探 索 性 工 作 。通 过 实 验 验 证 了 自 制 的 热 线 风 速 仪 具 备 良 好 的 测 量性 能 , 够用 于紊 流 的研究 。 能 关 键 词 : 线 风 速 仪 ; 流 ; 洞 热 紊 风 文献标 识 码 : B
() a 正
面
() b 反
面
图 3 热 线 电路 板 设 计 图
2 热 线 风 速 仪 的 调 试
在热线风速仪制作完成 之后 , 要对其进行 调试 , 需 以得 到 良好 的 热 线输 出 电压 一 风 速 关 系 曲线 。
热线 风 速 仪 的调 试 , 要 一 步 一 步 地 进 行 。先 调热 线 和 放 大 电路 部 分 , 它 们 能 够 得 出正 需 在 确 的模 拟 量 信 号 之 后 , 接 上 A/ 转 换 板 和计 算 机 , 行 系统 调试 , 系统 能 够 对 速 度 的 变 化 再 D 进 让
图 1 热 线 系 统 示 意 图
热 线 风 速 仪 制 作 的 主 要 工 作 就 在 于其 电 路 部 分 , 实 验 所 要 制 作 的热 线 电 路 是 在 参 考 了 本
日 大学松本彰教授提供 的热线工作 原理 图的基础上加 以修 改制作 的 。 本
1 1 对 参 考 电 路 图 的 修 改 .
维普资讯
第 3期
陆 青 松 等 :热 线 风 速 仪 制 作 的 初 步 研 究
6 3
泛 , 们 只 能 借 助 于 电 子 线 路 对 模 拟 人 信 号 作加 减乘 除 以及 积 分 、 分 , 微 以 此 来 完 成 对 数 据 的 处 理 , 此 原 图 中 因 较 多 地 使 用 了集 成 放 大 器 , 得 电 子 使 线 路 不 可 避 免 地 会 存 在 零 点 漂 移 和 信 号失 真 、 形等 等一 系列 的 问题 , 变 这 会 在 电 路 的设 计 、 试 和 运 行 上 带 ( 调 1 来 很 多 不 必 要 的 麻 烦 ] 。如 今计 算 机
热线风速仪实验

热线风速仪测速实验一、实验目的1.掌握热线风速仪的测量原理;2.利用热线风速仪对圆柱绕流场进行测量;3.学习热线风速仪所测速度信号的处理和分析。
二、实验装置热线风速仪原理示意图三、实验原理恒流热线风速仪电路图恒温热线测速仪(CTA)一般被用于紊流气体和液体流动中精细结构的测量。
其测量原理是基于流体对加热体的冷却效应。
热线金属丝(R w)被连接在惠斯通电桥的一边上,并由电流加热。
当流体流过热线金属丝时,金属丝被冷却其电阻随之发生变化,此时由一个伺服放大器通过控制传感器的电流保持电桥平衡,从而保持热线金属丝的温度不变,因此惠斯通电桥的电压(E)代表了热交换,从而实现了对流动速度的直接测量。
传感器(热丝)的低热惯性和伺服传感器的高增益的结合,使得CTA系统能够快速在一点上测量速度,从而捕捉流动中的波动,并提供连续的速度时间续列,使我们可以在振幅域和时间域对数据进行处理分析,例如平均速度、紊流强度、高阶力矩、自相关和能量谱的分析。
四、实验方法与步骤1、探针标定(1)将标定单元的电源线接入热线主机的“calibrate unit”接口,引入压缩气体(0.5-0.8Mpa)至标定单元,此时先不打开气源;(2)根据预标定的流速范围,选择相应型号的标定单元喷嘴,(open:0.02-0.5m/s,Ⅰ:0.5-60m/s),在标定单元相应位置上将喷嘴拧紧;(3)将热线探针接入探针支架(probe support),拧紧卡扣螺母,检查探针是否固定稳妥;(4)利用标定单元自带的夹具安装探针,使得热线正对于标定单元喷嘴出口平面的中心(一维探针);(5)用两端为BNC接头的数据线一端连接探针支架,一端连接热线主机上相应CTA单元的“probe”接口(CTA1、CTA2、CTA3任选一个)。
(6)打开热线主机和电脑,待热线主机上的红灯灭,“ready”灯亮;(7)打开电脑上的“streamware”软件。
(8)新建一个database,命名,选择A/D驱动“NI DAQmx supported device”进入硬件配置“System configuration”界面。
热线风速仪的工作原理

热线风速仪的工作原理热线风速仪是一种利用热敏电阻或热流量传感器来测量气体体积流速的仪器。
其工作原理基于热敏效应和热传导原理。
当仪器置于气流中时,由于热敏电阻或热流量传感器中的加热元件与周围气体接触,导致元件表面与周围气体形成了不同的温度梯度。
当气流通过这个温度梯度时,它会带走加热元件的热量,从而引起其温度下降。
为了保持加热元件的恒定温度,热线风速仪通过通过反馈调节电路向其加热元件提供恒定的电流,使其恒定发热。
由于加热元件发热的能量与通过它的气体体积流速成正比,因此测得的加热元件表面温度可以用来计算气体流速。
测量精度和灵敏度主要取决于热敏电阻或热流量传感器的特性以及补偿算法的质量。
热线风速仪具有响应快、抗干扰性强等优点,适用于测量大气、气流等流体的流速。
热线风速仪 原理

热线风速仪原理
热线风速仪原理。
热线风速仪是一种常用的风速测量设备,它通过测量风速对空气进行加热,然后测量加热后空气的温度差来计算风速。
其原理主要基于热力学和传热学的相关知识,下面将对热线风速仪的原理进行详细介绍。
首先,热线风速仪的核心部件是热敏电阻,也称为热线。
当空气流经热线时,热线受到空气的冷却作用,导致热线的温度下降。
为了保持热线的恒定温度,热线风速仪会通过控制电流来保持热线的温度不变。
当空气的流速增加时,冷却效果也会增加,导致热线温度下降更快,反之亦然。
因此,通过测量热线的电阻值变化,就可以计算出空气的流速。
其次,热线风速仪还需要考虑空气的传热特性。
空气的传热特性会影响热线的温度变化速度,因此需要对空气的传热特性进行精确的测量和计算。
一般来说,热线风速仪会采用一定的数学模型来描述空气的传热特性,从而准确地计算出空气的流速。
最后,热线风速仪还需要考虑环境因素对测量结果的影响。
例如,温度、湿度等因素都会对空气的传热特性产生影响,从而影响热线的温度变化速度。
因此,在使用热线风速仪时,需要对环境因素进行精确的监测和校正,以确保测量结果的准确性。
总之,热线风速仪通过测量热线的电阻值变化来计算空气的流速,其原理基于热力学和传热学的相关知识。
在实际使用中,需要考虑热线的温度控制、空气的传热特性以及环境因素对测量结果的影响,以确保测量结果的准确性和可靠性。
希望通过本文的介绍,能够帮助大家更好地理解热线风速仪的原理和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于恒温热线风速仪的研究作者:A.E.PERRY和G.L.MORRISON 澳大利亚墨尔本大学机械工程系(1970年4月14日收到)对于普通的“反馈放大桥式”恒温热线风速仪,通过研究,我们已经算出它的静态及动态响应。
在本文中,反馈放大增益处于中等水平、桥的不平衡影响、桥的响应偏离影响、放大补偿电压影响、缺乏共模抑制影响、频率响应放大器影响和常量跨导影响均包括在内,根轨迹的系统映射出来结果的分析从操笔者及设计者的观点都做了讨论。
1:介绍热线风速仪是校准静态及测量高频成分成分大小的工具,实验者如何知道仪器在高频率下是否正常工作的唯一途径就是在这些频率下做出电压激励,这很困难难而且不方便。
除此之外,系统响应可以由直接电路测试,比如从一个外部电压源对系统激励的得出。
但从实验者的观点来看,这是无法令人满意的。
尤其是当一个人缺少对电路系统的综合考虑的时候。
商业运作指导手册不会对仪器提供的进程有指导的。
因此,几乎没有用户相信结果。
人们对于热线风速仪的不满意让笔者更明显的认识到,他们在用不同的热线系统测量同样的速度(20%不同)时在动荡程度上缺少一致性,而且在保持系统稳定上非常困难。
对于这些问题,学者们执行了一项详细的研究,这份报告就是描述的研究的第一个阶段。
主要关注的是标准桥式电路和反馈放大系统的响应。
随着价格低、漂移小的可用于实用综合电路形式的放大器的普及,对于非电子专家也可以很容易地构建自己的热线风速仪。
笔者希望,这份报告可以提供各种对系统正确操作和校准的方法。
过去,人们总是设计系统逼近热线保持恒温的明显的理想情况(因此它的名字就叫恒温热线风速仪),在这些情况下,热线保持着特定的温度变化方式,这种变化方式我们是知道的。
但是在实际情况下,热线的温度绝不会真正的恒定,即使是系统校准得非常好,温度的变化也必须考虑。
人们利用教高放大增益在非常小的范围内试图保持热线温度恒定,但这样会导致平衡问题。
利用更高的放大增益激励和因此产生的热线电阻是:(1)系统的分析被大大简化了;(2)认为高频率响应就是结果。
常用的简化分析假设就是桥在实验点上平恒性能非常好,并且,如果在桥上没有任何分散电阻,放大器所显示的电阻就可以被认为是电阻而且是平衡的。
由此导致了在单一的反馈循环中的常量跨导。
这种处理省略了许多可以观测到的不平衡的因素。
因此,一项包含了中度放大响应增益、桥的不平衡程度、桥电阻的离散程度、放大电压偏移量、缺乏共模抑制影响、放大频率响应影响、常量跨导的偏移的研究正在进行中。
据笔者所知,之前没有实行过任何相似的实验,即使有,也只是仅仅包含了一或两个以上提及的影响一些分析。
在这份报告的第二段里面,提及了静态非线性研究,第四段里提到了理想动态非线性系统的研究。
静态与动态系统的联系就明显了。
在第六段里,一个实际热线系统由电桥电阻影响的平衡度和频率响应,以及一些实用的复杂情况都被研究过了。
在第七段里面,提及了一些实验去验证研究的一些特定的方面。
2:非线性研究图1是一个典型的电路。
第一个部分是不同的电压放大增益K,用偏移量控制。
第二个部分是用电压增益的放大器,这样一个系统有如下的理想状态响应:0()i qiE K E E=+(1)在这里,qiE是输入的需要启动系统和可能被用在一些需要的点上平衡电桥的电压偏置,放大器的输出电流是:0()/I qi T I K E E R =+ (2)这里T R 是电桥的静态电阻,通过热线的元件电流是:10()/b c I I R R R =+∑ (3) 这里:a b c R R R R R =+++ω∑放大器输入电压是:12i a c E I R I R =- (4) 0/I R R =-'∑ (4a ) 这里:b a c R R R R R -=ω' (4b ) 联立(2)、(3)和(4)如下: 1()()()qi b c a b c KE R R I R R R R KR +=+++ω' (5)电热丝的静态响应是:21()()/g I F U R R R =-ωω (6)这里g R 是常温时的热丝电阻,U 是流体速度,F(U)的精确形式不是太清楚的,“克英公式”形式为: ()F U X Y U =+这里,X 和Y 是由热线和流体情况决定的常量,这只是一个大概的公式,至于用不同的F(U)形式来研究电路,对于系统的时间常数和灵敏度只会有微小的偏差,我们可以认为一个在电桥平衡时的特殊实验点就是是平衡点。
在这种情况下:0,0.i E R ==' (8) 一个对于这个闭环系统静态试验的方便的表达形式由(5)式和(6)式的交叉积形成,如图2所示。
图2:放大器和热线特性图中,试验点由(5)中K 与qi E 为常数和(6)中U 为常数决定。
(5)式的垂直渐近线是: a b a b a c a c b cKR R R R R R R KR R R --=++ω (9) 在低增益下,(9)式显示渐进电阻R ωa 可能会比g R 小,然而,对于这一情况,(6)式显示21I 必然为负,这显示,电丝由电流冷却。
公式(6)逼近21I X Y U ==+λ则R ω→∞这条错误曲线是(5)式的负增益或负数的解。
为了便于计算,在这份报告中,采用一个典型的铂丝参数直径为4um ,长度为1.2mm ,在空气中,X=23002()mA ,Y=8402()mA 1122s m -,R ω=5Ω。
偏置电压,这条路径没有研究价值,后面也会说到的,wa R 左边的所有点都是不稳定的。
系统的稳态响应可以在图2中通过变换不同的K 与qi E 追踪试验点与平衡点来研究。
假设系统在A 点通过一个平衡过的电桥实验,当qi E 减小时,平衡点会沿着恒压线U const =移动,沿着A ,A ',A ''直到到达点w g R R =。
当调整到热丝上电流为0时,系统停止运作。
在调整过程中,5式的垂直渐近线转变为wa g R R =。
在克英公式中,正如图三所示,图线描绘的形状为沿着一条垂直线穿过初始的平衡点A 。
图三中的阴影代表线以外的大片区域轨迹不能达到。
这些区域代表阻力为无限时(公式6中可见)时的情况,代表热丝中的发热量达到气流在设定情况下所能达到的最大值。
在达到这种情况前就会烧毁。
另外一种转变平衡点的方式就是在电桥电阻a R 、b R 和c R 保持已调整好状态时改变速度和偏置电压,如果上面两种方式在偏置电压减小时保持平衡点在垂直路线w wb R R =上移动。
由于U <0,点B 与B ''被称为虚拟平衡点。
一个相应的虚拟平衡点如图三中的B '点,这个点在可能的结果和途径之外,因此,系统虚拟平衡点永远不会成为试验点。
第三种改变平衡点的方法就是保持速度和电桥电阻a R 、b R 、c R 恒定,改变qi E 。
平衡点(最初的图二中的点A )将会沿着垂直线w wb R R =移动。
系统的试验点O 将会沿着曲线U const =移动。
曲线XY 和YZ 代表式5,平衡点为B '',实验点为O 。
试验点和平衡点在点O 遇到垂直线w wb R R =时会重合。
这在1q E 和2q E 之间发生。
第三种技术是最实用的调整平衡点的技术,这种调节的结果之一1q E 可能会达到0,当电流在这种情况下保持初始状态,5式左边不确定,因此()()0a w b c R R R R KR +++='在4.1节里面,在决定一个真实热线系统的频率响应时极限过程非常重要。
图二也指出速度使试验点沿着qi E const =所决定的路径变化。
因此,当U →∞时,热丝电阻w R 逼近一个最小的电阻aw R 。
在图三中的克英公式中,实验点所描绘的路径由一条不完整的曲线表示。
这条路径偏移一条恒定电阻的量由反馈放大器的响应与偏置电压决定。
热丝电阻的变化导致校准数据的斜率,21I 与U ,作为速度变化的一个表现。
这对动态灵敏度的影响将在6.6节中做深入讨论。
3:热线的直流线性扰动响应正如在线性分析里提到的,我们将在实验点附近将系统线性化分析。
热线系统是一个非线性设备,它的电压电流关系我们可以从6式里看出,如下:211()/(()).w g E R F U I F U I =- (11) 通过定义w R 我们可以知道1w w E R I =。
式11对应的为恒速度形式,就是说,如图4中所示,()F U const =。
图形在原点的斜率等于冷线的静态电阻g R 。
在实验点D ,静态热线电阻是w R 以及小的直流扰动,热线电阻可以从曲线上D 点的切线得到。
1w wdc E Z I ∂=∂ (12) 从式11和12可得: ,wdc w Z R =+'α(13) 在这里 2()/w w g g R R R R =-''αwR '表示在试验点D 的值。
对于13式,我们可以看出热线的高电流或高温度的阻抗与静态电阻相差很大。
(图四:热线的电压电流关系)4:实际热线风速仪在湍流场中的实验4.1 基本方程在整篇文章中,比如w E 之类的大写字母,表示不同大小的瞬时值。
如'w E 等表示平均大小,如w e 之类的小写字母代表小的扰动。
因此w E ='w E +w e 。
相同的小写字母一样或被用来表示扰动的拉普拉斯变换。
这里的分析是对于对直流到频率超出范围的电流有平直响应的放大器。
在6.4节中,我们研究了有限频率放大器响应的影响。
一些热线系统的直流电非常大,或者是响应频率很小,以及中等大小和平直的电流响应。
在100Hz 的时候,响应频率发生变化。
接下来的是对于图1中/10,500dc ac ac K K K >>的典型系统的分析。
dc K 是用来计算R '以及ac K 是用来在各种扰动方程里面代替符号K 的。
线性逼近热线电压扰动w e ,会导致一个速度扰动u '和电流扰动1i ,如下式所示: 10101w w w i u E E e u i U I ==∂∂=⎜+⎜∂∂'' (14) 14式中的第二项包函了电流变化的影响,这是由于反馈系统试图保持热线电阻恒定导致的。
在这个方程里面,所有的分析是在频率域里面进行的,所以时间的导数没有考虑进去。
恒流下的热线速度扰动的灵敏度可以从热线的动态能量平衡关系获得,关系式为式6加上一个允许热线热量积累的附加方程。
克劳形式为: 21()()(/)w w g w I R R R X Y U C dR dt =-++ (15) X ,Y 由一个给定的热线决定,C 由热线的终端性能决定。
从15式可以得到: 101w i E x U Ts =∂⎜=-∂+ (16) 这里,S 是拉普拉斯变量,21()2w g g Y R R x UR I -=,21()w g g C R R T I R -=。