电力机房巡检机器人应用方案 ppt课件
定点巡检机器人三维实景智能平台PPT演示课件
一、智能电力的应用背景需求:
目前现有机器人存在的问题有:
现有巡检机器人设备安装复杂、造价高昂、维护成本高; 现有巡检机器人在110KV、35KV等规模较小的无人变电站普及难度大 110KV、35KV无人变电站却有数量众多、地点分散、尤其在夏冬季节 用电高峰时,巡检工作量大、任务重; 目前普遍的在线监测系统可靠性不高、准确性不够。
1、直观智能远程巡检
图3: 三维虚拟场景模式展示变电站场景及测温点位置,红外及可见光图像同步展示 9
三、定点巡检机器人三维实景智能平台核心功能
1、直观智能远程巡检
图4: 红外及可见光图像同步展示, 可直接进行云台操作、一键拍照、图片查看等操作10
三、定点巡检机器人三维实景智能平台核心功能
2、跨平台多数据融合分析
18
三、定点巡检机器人三维实景智能平台核心功能
3、直观智能告警
图11: 自动巡检方案配置面板
19
三、定点巡检机器人三维实景智能平台核心功能
3、直观智能告警
图12:场景实时告警记录面板
20
三、定点巡检机器人三维实景智能平台核心功能
3、直观智能告警
图13:配置告警短信联系人
21
上海维坤通信科技有限公司 维坤智能科技(上海)有限公司
2、跨平台多数据融合分析
图9:设备数据面板之红外测温数据
16
三、定点巡检机器人三维实景智能平台核心功能
2、跨平台多数据融合分析
图10:设备实时数据面板之测温数据
17
三、定点巡检机器人三维实景智能平台核心功能
3、直观智能告警
整个三维场景中,直观、高效每个设备模型会随着固定巡检机器人 实时采集来的数据,智能判断设备工作状态是否正常。对于出现异 常的,三维场景会自动将设备渲染成告警模式并定位,不断提示操 作人员及时排除故障。 自动巡检方案配置;系统后台服务按照配置的自动巡检时间方案, 按时执行定时巡检操作;在巡检过程中发现的异常,以系统告警和 告警短信的形式发送展示。
变电站智能巡检机器人性能检测关键技术解析_电力技术讲座课件PPT

1.机器人的室外表计巡检识别完成总时间应小于100分钟,室内表计巡检识别完成总时间应小于60 分钟。 2.将机器人实时识别结果与设置值进行比较。对于非指针式表计,机器人识别结果与设定值完全 一致符合要求。对于指针式表计,误差小于±5的机器人识别结果符合要求。 3.分别统计机器人每次连续的表计巡检识别任务中的表计识别结果满足要求的数量,每次巡检任 务的准确率不低于80。
中国电力科学研究院在国网特高压交流试验基地(武汉),开 展了变电站巡检机器人性能试验场建设工作,于2015年建成了国内 外首个变电站巡检机器人性能试验能力,目前包括室外巡检试验场、 室内巡检试验场和设备缺陷智能识别试验场三大部分。
3
背景
变电站巡检机器人性能试验场地
4
性能检测关键指标分析
受国家电网公司设备管理部委托,2014年至2019年期间,中国电 力科学研究院共承担了5批次国家电网公司变电站巡检机器人性能集中 试验检测。根据《国家电网公司2019年变电站智能巡检机器人性能检 测方案》,中国电力科学研究院在室外表计识别试验项目基础上,增 加了室内表计识别试验项目,并对原有变电设备异物缺陷人工智能识 别功能项目进行了优化完善。
后2次停车位置方向与第1次停车位置方向之间的夹角均小于 20°。
角。
停车位置起点的距离和停车方向
夹角测量示意图
18
标准编制情况
可见光表计识别试验
试验方法
机器人在表计识别室外试验场和表计识别室内试验场分别进行3次连续的表计巡检识别任务,在每 次巡检任务开始前需对所有表计的读数进行调整,分别记录巡检任务开始的时刻和结束时刻,计 算室外表计和室内表计的巡检识别完成总时间。
<50min,2个型号样品
50
电力行业智能巡检方案ppt课件

MAP Value Proposition © 2007 Cisco Systems, Inc. All rights reserved. Cisco Confidential
8
※电缆隧道吊轨巡检机器人功能
• 红外热成像精确测温系统 • 可见光智能识别系统 • 声音采集系统 • 应急实时对讲系统 • 快速追踪识别系统 • 强大的告警联动系统 • 隧道环境监测系统(温湿度,有害气体含量,空
特殊巡检
• 多站集中控制系统
MAP Value Proposition © 2007 Cisco Systems, Inc. All rights reserved. Cisco Confidential
13
※变电站磁导航机器人功能
• 红外热成像精确测温系统 • 可见光智能识别(表计、油位、断路器及隔离
9
※输电线路巡检无人机功能
• 红外热成像精确 测温系统
• 可见光智能识别 系统
• 无缝漫游的MESH 无线通信系统
• 多种巡检模式: 定时巡检、周期 巡检、不间断巡 检、特除巡检
MAP Value Proposition © 2007 Cisco Systems, Inc. All rights reserved. Cisco Confidential
4
电力设备巡检现状
• 输电线路巡检
传统的巡检方式存在效率低、 质量差、危险度高、劳动强度大 等缺陷,环境条件恶劣的区域 更是如此。巡检方式的改变和提高迫在眉睫。
• 配电所/开闭所巡检
与变电站巡检类似,尽管现在有手持式智 能巡检仪器,但对于无人值守的站所仍存在着实 时性不强、精确度不高、操作繁琐、人力资源浪 费等缺陷。
站端服务器 站端服务器主要由监控计算机系 统、网络集线器(HUB)或交换 机、激光打印机以及相应的通讯 设备组成。
电力行业智能巡检方案ppt课件
严格执行突发事件上报制度、校外活 动报批 制度等 相关规 章制度 。做到 及时发 现、制 止、汇 报并处 理各类 违纪行 为或突 发事件 。
电力设备巡检现状
• 电缆隧道巡检
目前传统的电力电缆隧道巡检方法,主 要依靠人工及少量环境监控器实现。但 是由于电力电缆隧道路程长,封闭性强,构 造物多,通讯不便,有害气体存在,一旦出 现突发事故,将对巡检人员的人身安全造 成极大威胁。
4
严格执行突发事件上报制度、校外活 动报批 制度等 相关规 章制度 。做到 及时发 现、制 止、汇 报并处 理各类 违纪行 为或突 发事件 。
汇报提纲
背景需求 解决方案 应用领域
5
严格执行突发事件上报制度、校外活 动报批 制度等 相关规 章制度 。做到 及时发 现、制 止、汇 报并处 理各类 违纪行 为或突 发事件 。
大数据分析与决策支持系统
▪ 大数据分析与决策支持系统可以对包含红外测温影像,紫外影像,红外测气体泄漏 影像,超声局放信号,特高频局放信号,油中溶解气体图谱,介损电容量,暂态地 电压,可见光影像和音频图谱进行分析;根据监测系统实时传送的输变电检测数据, 利用红外测温、气体泄漏、可见光影像识别技术进行识别,对于异常信息进行报警; 实现变电站设备在线检测、机器人带电检测数据的后台自动在线模式识别,自动判 别缺陷及其风险程度,推送预警信息。
电力设备巡检现状
• 输电线路巡检
传统的巡检方式存在效率低、 质量差、危险度高、劳动强度大 等缺陷,环境条件恶劣的区域 更是如此。巡检方式的改变和提高迫在眉睫。
• 配电所/开闭所巡检
与变电站巡检类似,尽管现在有手持式智 能巡检仪器,但对于无人值守的站所仍存在着 实时性不强、精确度不高、操作繁琐、人力资 源浪费等缺陷。
智能云巡检云巡逻铁路电力巡检全套方案PPT课件

自定义作业线路,设置作业流程,时间计划等。 自定义表单,关联巡检线路
系统展示
管理后台
系统设置部分导航管理、部门管理、员工管理、角色管理
第21页/共23页
谢谢观看
第22页/共23页
日期:2018年08月18日
感谢您的观看!
第23页/共23页
巡查
跟进等问题,加大巡检难度,无法及 时上报险情。
第3页/共23页
现状与背景
智能巡检系统
?
如何杜绝保安、巡检 人员玩忽职守所造成的 财产损失,减少频繁发 生的火灾、盗窃、事
故等事件。
智能 巡检 系统
?
如何通过科学有 效的技术手段,加强 对保安巡逻、巡检人员 进行有效监督、应急
调度。第4页/共23页 Nhomakorabea系统
为用户创造价值
降低 成本
1、减少纸张、笔墨打印 2、无需定期回收、人工统计巡检状况 3、APP快捷易用,降低培训成本
1、减少工作遗漏 2、检查人员到岗情况 3、节约管理时间 4、工作方式更加快捷 5、现场处理问题流程减少,提升处理效率。
第13页/共23页
提升 效能
应用场景
主要使用场景
房地产/物业/医院/学校安保巡检
当系统检测到巡更人员到达有任 务安排的巡检线路时,系统自动 将任务下发至巡检终端,提示巡 更人员执行任务。
信息查询统计
多种条件组合查询,各类报表统 计,使人员、线路、时间、漏检 等情况一览无余。
可在平台地图上实时显示巡检人
线路管理中可查看线路执行情况,
员位置和巡检轨迹。
监控中心界面统计今日巡检上报
相关信息。
巡检轨迹实时跟踪
巡检线路随时查看
第8页/共23页
电力行业智慧巡检解决方案PPT
第三次工业革命
是计算机和互联网
第二次工业革命
是电力,电力传输使能源生 产规模化
普遍认为:第四次工业革命
为核心低碳经济革命,需要防 止能源枯竭,抑制气候变化, 促进节能减排,发展低碳经济
智能电网融合了信息、控制、电力电子等技术,是“效率”的进一步提高,是实施低碳经济的基础。
2 . 发展背景
智能电网被公认为是未来电网发展的最佳方法,智能 电网在欧美国家已经逐步上升到国家战略层面。
智慧电网概述
一个 目标
两条主线 三个阶段
四个体系
五个内涵
六个环节
坚强智能电网
技术主线 管理主线
2009-2010年 2011-2015年 3. 2016-2020年 规划试点阶段 全面建设阶段 引领提升阶段 1. 电网基础体系 2. 技术支撑体系 3. 智能应用体系 4. 标准规范体系 1. 坚强可靠 2. 经济高效 3. 清洁环保 4. 透明开放 5. 友好互动
3 . 发展意义
(一)满足经济社会发展对电力的需求 通过建设坚强智能电网,提高电网大范围优化
配置资源能力,实现电力远距离、大规模输
送,满足经济快速发展对电力的需求。
(二)应对资源环境问题带来的挑战 通过建设坚强智能电网,实现可再生能源 集约化开发、大规模、远距离输送和高效 利用,改善能源结构,促进资源节约型、 环境友好型社会建设。
智能电网的 意义
(三)适应发用电多样化的发展要求
通过建设坚强智能电网,实现各类集中/分布 式电源、储能装置和用电设施并网接入标准化 和电网运行控制智能化,提高电力系统资产的 运营效益和全社会的能源效率,促进经济社会 的可持续发展。
(四)满足多元化用电服务需求
通过建设坚强智能电网,提高电能质量和供电 可靠性,创新商业服务模式,提升电网与用户 双向互动能力和用电增值服务水平。
电力巡检机器人
• 利用人工智能和大数据技术,提高智能决策能力
发展方向
• 与电力系统的深度融合,实现智能巡检
• 发展多场景、多任务的巡检机器人,满足不同需求
• 提高机器人自主能力和环境适应性,适应复杂环境
电力巡检机器人与电力系统的深度融合
深度融合
应用场景
• 机器人与电力设备、系统的信息交互和数据共享
• 机器人辅助电力设备故障诊断和维修
• 与电力系统的深度融合,实现智能巡检
• 大数据分析,为电力调度和运维提供决策支持
• 为电力行业智能化发展提供技术支持
• 智能决策,优化巡检策略,提高运营管理效率
04
电力巡检机器人的发展趋势与挑战
电力巡检机器人的技术创新与发展方向
技术创新
• 提高导航和定位精度,实现更高效、更准确的巡检
• 开发新型传感器和检测设备,提高检测精度和可靠性
智能决策能力
• 故障诊断:通过大数据和人工智能技术,自动诊断设备故障
• 预警:发现异常时,及时发出预警信息
• 优化巡检策略:根据设备状态和历史数据,优化巡检频率和时间
03
电力巡检机器人的优势与价值
电力巡检机器人提高巡检效率与质量
提高巡检效率
提高巡检质量
• 自动化巡检,替代人工进行重复性工作
• 高精度检测,降低误报和漏报率
降低安全风险
• 机器人进行巡检,避免人工触电、高空坠落等风险
• 实时监测设备状态,提前预警故障,降低事故风险
• 智能决策,减少误操作,降低安全风险
电力巡检机器人促进电力行业智能化发展
促进智能化技术发展
提高电力行业管理水平
• 电力巡检机器人技术不断创新和升级
• 实时监测设备运行状态,提高设备管理水平
室内配电室智能巡检机器人 挂轨式方案
配电房AI巡检机器人巡检方案目录一、效益分析 (3)1.1安全效益分析 (3)1.1.1国产化保障信息安全 (3)1.1.2通信安全 (3)1.2直接效益分析 (3)1.3社会效益分析 (4)二、项目概况 (4)2.1行业背景 (4)2.2 行业痛点 (5)2.3需求分析 (5)三、系统方案设计 (6)3.1 系统架构 (6)3.1.2机器人系统介绍 (7)3.1.3后台管理系统 (8)四、系统主要功能 (11)4.1视频识别 (11)4.2红外测温 (11)4.3环境检测 (12)4.4音频采集 (12)4.5局放监测 (13)4.6双向语音 (13)4.7任务管理 (14)4.8数据分析 (14)4.9报表输出 (15)4.10预警与联动 (17)4.11机器人自检 (17)五、部署方案 (18)5.1 35KV配电室机器人部署 (18)5.2 10KV配电室机器人部署 (19)一、效益分析1.1安全效益分析1.1.1国产化保障信息安全芯片是现代信息技术的基础,无论是手机、电脑、互联网、人工智能、物联网、大数据等等,都离不开芯片的支撑。
如果芯片都依赖于外国的技术和供应,这就给我们国家的信息安全带来了巨大的隐患,就相当于把我们国家的信息命脉交给了别人。
别人可以随时切断我们的供应链,限制我们的发展空间,甚至植入后门、窃取数据、发动攻击。
芯片的国产化是为了我们国家的信息安全。
这是一场没有硝烟的战争,也是一场关乎我们国家未来的战争。
AI巡检机器人克服重重困难,毅然使用国产芯片,这不仅是一项科技工程,更是一项民族工程。
使用国产芯片,才能保证我们国家的信息安全,才能实现我们国家的科技强国梦!1.1.2通信安全AI巡检机器人采用PLC 技术:(1)电力系统监控和控制:PLC技术可以用于实时监控电力系统的运行状况,以及远程控制电力系统的运行。
(2)电力网络安全:PLC技术的传输安全性比较高,可以有效防止电力系统数据遭到外来侵害,提高电力系统的安全性。
电力智能巡检系统介绍PPT(26张)

前端功能-记录缺陷
• 程序能够对杆塔的各种检查项目 进行检查,保证不会遗留任何的 检测项目
前端功能-无线数据同步
• PDA客户端能够无线GPRS/CDMA) 上传和下载数据。
前端功能-系统状态监控
• 系统能够监控本身运行状态,更好的进行 排错处理。
前端功能-短信协同工作
• 巡检人员找到附近的同伴,并通过发短信 实现协同工作。
•
8、世上的事,只要肯用心去学,没有一件是太晚的。要始终保持敬畏之心,对阳光,对美,对痛楚。
•
9、别再去抱怨身边人善变,多懂一些道理,明白一些事理,毕竟每个人都是越活越现实。
•
10、山有封顶,还有彼岸,慢慢长途,终有回转,余味苦涩,终有回甘。
•
11、人生就像是一个马尔可夫链,你的未来取决于你当下正在做的事,而无关于过去做完的事。
前端功能-杆塔管理
• 通过电子地图管理杆塔,查看、 修改等杆塔信息。
前端功能-计算距离
• 在地图上任点击两点可以计算出 两点之间的实际距离。
前端功能-显示巡线轨迹
• 通过地图看到巡线的轨迹,了解巡线的整 个路径。
前端功能-自动定位杆塔
• 能够利用GPS信号,自动的找到在数据 库中与之相匹配的杆塔记录。
目录
• 什么是电力智能巡检系统? • 为什么需要电力智能巡检系统? • 华微电力智能巡检系统介绍 • 为什么选择华微软件?
什么是电力智能巡检系统?
电力智能巡检系统概念
• 一个围绕标准化、规范化、信息化课题建立起来的、用于提高缺陷 管理和巡检管理的管理水平的专用系统。
巡检人员在野外作业时,使用 GPS(全球定位系统)和PDA (掌上电脑)通过无限网络下 载要检查的杆塔信息,然后到 现场检查后,把检查结果直接 提交到服务器。
电力行业智能巡检方案27页PPT

▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
电力行业智能巡检方案
11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上,她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
27
智能配电站室内电力巡检机器人应用
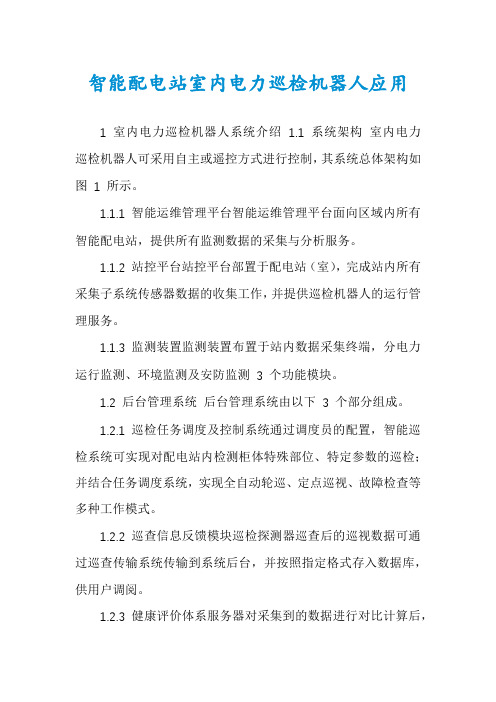
智能配电站室内电力巡检机器人应用1 室内电力巡检机器人系统介绍 1.1 系统架构室内电力巡检机器人可采用自主或遥控方式进行控制,其系统总体架构如图 1 所示。
1.1.1 智能运维管理平台智能运维管理平台面向区域内所有智能配电站,提供所有监测数据的采集与分析服务。
1.1.2 站控平台站控平台部置于配电站(室),完成站内所有采集子系统传感器数据的收集工作,并提供巡检机器人的运行管理服务。
1.1.3 监测装置监测装置布置于站内数据采集终端,分电力运行监测、环境监测及安防监测 3 个功能模块。
1.2 后台管理系统后台管理系统由以下3 个部分组成。
1.2.1 巡检任务调度及控制系统通过调度员的配置,智能巡检系统可实现对配电站内检测柜体特殊部位、特定参数的巡检;并结合任务调度系统,实现全自动轮巡、定点巡视、故障检查等多种工作模式。
1.2.2 巡查信息反馈模块巡检探测器巡查后的巡视数据可通过巡查传输系统传输到系统后台,并按照指定格式存入数据库,供用户调阅。
1.2.3 健康评价体系服务器对采集到的数据进行对比计算后,及时将数据从各布控点汇集至监控中心,保证检测条目零疏漏、零延时、零失真;结合专家信息数据库信息,对比分析巡检探测器的巡查数据,并对配电室的安全特性作出评价。
1.3 功能特点电力巡检机器人能够利用可见光、红外线、气体等传感器实现对设备运行及环境状态的智能感知,可以代替人工对配电室电柜本体、安防与环境进行监测,范围可覆盖配电室内全部待检测设备。
本文介绍的室内电力巡检机器人系统,具有以下优点:(1)自动化程度高,控制灵活。
电力巡检机器人采用激光导航技术,基于目标任务以及规划路径,既能够自主对巡检路线进行规划,实现自动巡检,也可以在操作界面进行手动控制。
(2)可实时监控。
电力巡检机器人在到达规定的地点后,能够按照要求立即进行拍照监视;通过搭载高清相机,还可实现远程监控记录,并将实时数据反馈至站点服务器。
(3)安全可靠。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人系统组成
机器人运 动模块
由内部齿轮和四组从动滚轮组成,支持最高50m/min的直行速度, 机器人底盘模块具有强大过弯能力,转弯半径不低于60cm,真正 的做到在特殊复杂环境中检测无死角。升降1到3米。
智能巡检 机器人
安全防护 模块
前端搭载 模块
采用红外光电传感器进行安全防护,机器人能自动探 测周围环境,当识别到在巡检路线上存在障碍物且不 能安全通过时,能自动停车并报警。
红外测温 功能
变电站巡检机器人搭载 红外热像仪,具备自动 对焦功能。能够对站内 设备进行温度检测,并 显示影像中温度最高点 位置及温度值。能按照 要求对电流致热型和电 压致热型缺陷或故障进 行自动分析判断,并提 出预载局放传感器,具备超声波和地点 波两种检测模式,支持点巡检和线性巡检两种检测方式。 能够对屏柜的局部放电数据进行读取,自动记录和判断, 并提出报警。(可定制)
应用背景
轨道式智能巡检机器人系统通过搭载视频设备和传 感器,沿轨道对电力设备进行巡检,能够实现变电 站室内设备全方位、全自主智能巡检和监控,也可 以人工操作,获取需要检测设备的重要信息。本检 测系统大大提高了检测的范围,提高了巡检的效率 和智能化水平。 轨道式智能巡检机器人系统的应用可有效降低设备 维护成本,提高设备巡检、设备管理的自动化和智 能化水平,为智能变电站和无人值守站提供新型的 技术检测手段和可靠的安全保障,具有巨大的社会 效益、经济效益和安全效益,市场前景广阔。
用户的集成平台软件在实现控制前端监控设备 的同时,也要同步要对机器人发送控制指令,以便 实现两者同步预置位功能;
机器人系统组成
后台监控部分
1) 系统具备提供巡检时采集、存储可见光和红外视频的功 能,并支持视频的播放、停止、抓图、录像、全屏显示等 功能。 2) 系统提供巡检点上采集、存储的红外热图功能,并能够 从红外热图中提取温度信息。 3) 系统提供手动控制和自动控制两种对机器人的控制方式, 并能在两种控制模式间任意切换。手动控制功能可实现对 机器人底盘、伸缩模块、可见光摄像机和红外热像仪的控 制操作。自动控制时,系统能够在全自主的模式下,根据 预先设定的任务或者由用户临时指定的任务,通过机器人 各功能单元的配合实现对设备的检测功能。 4) 任务规划功能的可编辑巡检点不少于255个。 系统软件人机界面无效点击操作少、操作方便,信息显示 清晰直观,对操作人员的专业能力要求低。
可见光监控
高清摄像头,具有200 万像素,30倍光学变焦, 聚焦快速,准确。
红外热成像(可定制)
轨道部分
轨道型材采用高强度铝合 金,可拼接为U型弯和S型 弯,可以根据现场环境进 行设计
机器人系统组成
局放传感器(可定制)
局放传感器具备超声波和地点波两种检测模式, 传感器通过电机传送,具有160mm的伸缩行 程。 局放传感器性能: ★检测模式:超声波+地电波 ★ 检测频带:超声波:30~500KHz; 地电 波:3~100MHz ★ 测量范围:超声波:-90~80dB; 地电波: -70~85dB
应用背景
应用背景
PART 02
机器人系统 组成
机器人系统组成
智能巡检 机器人
变电站轨道式智能巡检监控机器人是一款可长距离水平方向运 动、智能型、监控摄像设备搭载平台系统,可挂载音视频采集设备、 影音播放设备、温控检测设备、红外热成像设备等。
结构主要分为:底盘模块、安全防护模块、前端搭载模块、可 见光监控、红外热成像仪、局放传感器、轨道部分、供电部分、通 信部分、后台监控部分。
机器人系统组成
PART 03
机器人系统 性能
机器人系统性能
PART 04
机器人系统 功能
机器人系统功能
自主巡检 功能
全自主 巡检
全自主巡检模式包括例行和特巡两种方式。 例行巡检方式下,系统根据预先设定的巡检内 容、时间、周期、路线等参数信息,自主启动 并完成巡视任务; 特巡方式由操作人员选定巡视内容并手动启动 巡视,室内挂轨机器人可自主完成巡检任务。
机器人系统组成
供电部分
变电站巡检机器人采用轨道供电系统的供电方式。 采用交流 220V 作为电源输入,可以有效保证在 变电站内可靠运行。
机器人系统组成
通信部分
前端监控设备的数字信号通过系统内部的通讯 通道进入接口控制箱,再通过网线接入后台服务器, 服务器经过交换机/路由器,最终分配给网络客户 端、网络硬盘录像机(NVR)、解码器等,实现监 控、存储和显示;
前端搭载模块用于搭载可见光摄像仪、红外热像仪和局放传感 器。同时,为满足特定设备状态监测和操作、行业业务处理等 定制服务,检测单元支持搭载多种传感器,如气体传感器等。
机器人系统组成
红外热像能够提前发现异常情况,避免演变为严重 故障,杜绝财产损失或对人身安全构成潜在威胁。 红外热像仪设备性能: ★ 红外检测设备成像分辨率:320×256; ★ 红外热像仪测温范围:-40ºC~+550ºC; ★ 测温精度为max(5℃ or 5%);
2018
变电站巡检机器人
目录
Contents
PART 01 应用背景
PART 02
机器人 系统组成
PART 03
机器人 系统性能
PART 04
机器人 系统功能
PART 05 常见问题解决
PART 01 应用背景
应用背景
变电站室内设备(如开关柜室、GIS室、电 容器室、继电保护室 )的稳定安全运行是保 证变电站正常运行的关键因素,需要运行人 员准确全面地了解变电站室内设备运行状态。 人工检测的内容主要包括测温、读表、指示 灯、保护压板位置状态等。变电站室内设备 是设备缺陷的高发区,需要运行人员重点巡 检。人工巡检没办法做到随时随地,轨道式 智能巡检机器人系统可有效降低人工巡检的 安全风险,24小时对变电站室内设备进行监 控,方便运行人员及时有效的了解室内设备 的运行状态。
遥控 巡检
遥控巡检模式由操作人员手动遥控隧道综合 管廊机器人,完成巡视工作。
机器人系统功能
检测 功能
变电站巡检机器人配备可见光摄像机、红外 热成像仪、局放传感器等检测设备,并能将 所采集的视频和声音上传至本地监控后台及 远程集控后台。可配置可见光摄像机、红外 热成像仪设、局放传感器。
机器人系统功能