信息机房的智能机器人巡检系统设计
ai机房巡检方案

AI机房巡检方案1. 简介AI(人工智能)技术在各行各业都有着广泛的应用,而AI机房作为运行和支持AI技术的重要基础设施,其运行稳定性和可靠性变得尤为重要。
为了及时发现和解决机房设备故障,减少停机时间,提高机房设备的使用效率和数据安全性,需要定期进行巡检。
本文将介绍一种基于AI技术的机房巡检方案,旨在通过使用AI技术来提高巡检效率和准确性。
2. 巡检内容机房巡检内容包括但不限于以下几个方面:2.1. 设备状态巡检巡检人员需检查机房中的各种设备,如服务器、交换机、路由器等,确保它们正常运行。
巡检内容包括:•设备是否处于正常工作状态•设备是否有明显的损坏或异常情况2.2. 温度和湿度监测巡检人员需要监测机房的温度和湿度情况,确保设备工作在正常的环境条件下。
巡检内容包括:•温度是否在正常范围内•湿度是否在正常范围内2.3. 电力供应检查巡检人员需要检查机房的电力供应情况,确保设备有稳定的电力供应。
巡检内容包括:•检查电力线路是否正常连接•检查UPS(不间断电源)是否正常工作2.4. 网络连接检查巡检人员需要检查机房的网络连接情况,确保设备能够正常联网。
巡检内容包括:•检查网络设备的网络连接情况•检查网络设备的配置是否正确3. AI技术应用为了提高机房巡检的效率和准确性,可以使用以下AI技术:3.1. 视觉识别通过安装摄像头来实现机房设备状态的自动检测和识别,可以大大减少巡检人员的工作量。
使用机器学习算法对图像进行处理和分析,可以自动检测设备是否处于正常工作状态,并及时发出警报。
3.2. 温湿度传感器使用温湿度传感器来自动监测机房的温度和湿度情况,可以及时发现异常情况并采取相应的措施。
3.3. 电力监控系统使用电力监控系统来实时监测机房的电力供应情况,可以及时检测电力线路的异常和UPS设备的故障。
3.4. 网络监控系统使用网络监控系统来实时监测机房的网络连接情况,可以及时发现网络设备的故障和网络配置的错误。
基于机器人技术的智能巡检系统设计与实现
基于机器人技术的智能巡检系统设计与实现智能巡检系统是一种基于机器人技术的自动化设备,可以应用于各种行业的巡检任务。
通过利用先进的感知、决策和执行能力,智能巡检系统能够实现高效、准确、安全的巡检工作。
本文将详细介绍基于机器人技术的智能巡检系统的设计与实现。
一、系统设计1. 硬件设备选择:在设计智能巡检系统时,首先要选择合适的硬件设备。
这包括机器人底盘、传感器、摄像头、运动控制系统等。
机器人底盘需要具备稳定性和灵活性,能够在不同地形和环境下进行移动。
传感器和摄像头可以用于检测和获取环境信息,包括距离、温度、湿度、图像等。
运动控制系统可以实现机器人的自主导航和路径规划。
2. 软件系统设计:智能巡检系统的软件系统设计包括感知、决策和执行三个核心模块。
感知模块负责获取传感器和摄像头的数据,并对环境信息进行处理和分析。
决策模块基于感知模块的数据进行决策,确定巡检路径和任务。
执行模块根据决策模块的指令,控制机器人进行移动、巡检和数据采集。
3. 数据处理和存储:智能巡检系统需要对感知模块获取的数据进行处理和存储。
数据处理可以包括特征提取、数据融合和算法分析等,以便于后续的巡检任务和故障诊断。
数据存储可以采用云端或本地存储的方式,保证数据的可靠性和安全性。
4. 用户界面设计:为了方便用户操作和监控智能巡检系统,需要设计用户界面。
用户界面可以包括控制台、监控图像和数据显示等。
通过用户界面,用户可以实时监控巡检任务的进度和状态,以及获取巡检数据和报告。
二、系统实现1. 传感器数据采集:智能巡检系统通过传感器获取环境数据,包括距离、温度、湿度等。
传感器数据的采集可以通过传感器模块实现,例如激光雷达、红外传感器等。
采集到的数据将用于后续的环境分析和决策。
2. 自主导航与路径规划:智能巡检系统需要具备自主导航和路径规划的能力。
通过利用机器人底盘上的运动控制系统和地图构建算法,系统可以实现自主导航和路径规划。
系统会根据环境信息、巡检任务和路径约束等因素,确定最优的巡检路径。
信号机房巡检机器人系统设计
-82-科学技术创新2019.11信号机房巡检机器人系统设计尚庆松(河南工业大学电气工程学院,河南郑州450001)摘要:利用机器人取代人工对铁路信号机房设备进行例行巡检,是铁路信号设备状态检测领域的一个重要发展趋势。
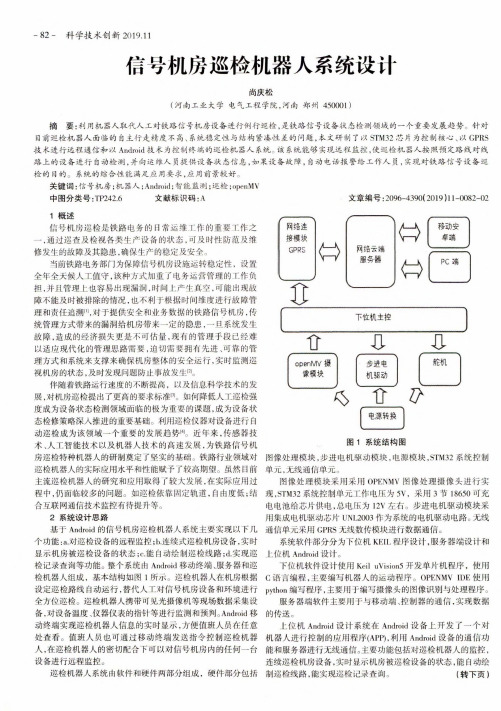
针对目前巡检机器人面临的自主行走精度不高、系统稳定性与结构紧凑性差的问题,本文研制了以STM32芯片为控制核心、以GPRS 技术进行远程通信和以Android技术为控制终端的巡检机器人系统。
该系统能够实现远程监控,使巡检机器人按照预定路线对线路上的设备进行自动检测,并向运维人员提供设备状态信息,如果设备故障,自动电话报警给工作人员,实现对铁路信号设备巡检的目的。
系统的综合性能满足应用要求,应用前景较好关键词:信号机房;机器人;Android;智能监测;巡检;openMV中图分类号:TP242.6文献标识码:A1概述信号机房巡检是铁路电务的日常运维工作的重要工作之一,通过巡查及检视各类生产设备的状态,可及时性防范及维修发生的故障及其隐患,确保生产的稳定及安全。
当前铁路电务部门为保障信号机房设施运转稳定性,设置全年全天候人工值守,该种方式加重了电务运营管理的工作负担,并且管理上也容易出现漏洞,时间上产生真空,可能出现故障不能及时被排除的情况,也不利于根据时间维度进行故障管理和责任追溯叫对于提供安全和业务数据的铁路信号机房,传统管理方式带来的漏洞给机房带来一定的隐患,一旦系统发生故障,造成的经济损失更是不可估量,现有的管理手段已经难以适应现代化的管理思路需要,迫切需要拥有先进、可靠的管理方式和系统来支撑来确保机房整体的安全运行,实时监测巡视机房的状态,及时发现问题防止事故发生叫伴随着铁路运行速度的不断提高,以及信息科学技术的发展,对机房巡检提出了更高的要求标准叫如何降低人工巡检强度成为设备状态检测领域面临的极为重要的课题,成为设备状态检修策略深入推进的重要基础。
利用巡检仪器对设备进行自动巡检成为该领域一个重要的发展趋势%近年来,传感器技术、人工智能技术以及机器人技术的高速发展,为铁路信号机房巡检特种机器人的研制奠定了坚实的基础。
基于机器人技术的智能巡检系统设计

基于机器人技术的智能巡检系统设计智能巡检系统设计是目前许多工业领域所面临的重要挑战之一。
随着科技的进步,人们对于提高生产效率和质量控制的需求越来越大。
在传统的巡检流程中,需要大量的人力和时间,而且容易出现疏漏和错误。
基于机器人技术的智能巡检系统设计成为解决这一问题的有效途径。
基于机器人技术的智能巡检系统设计旨在利用机器人的优势,实现自动化、高效率的巡检过程。
该系统的设计涵盖了机器人的硬件和软件部分,以及与巡检任务相关的数据管理和分析部分。
在硬件方面,智能巡检系统的设计需要选用适合巡检任务的机器人平台。
机器人平台应具有稳定的移动能力、高精度的感知能力以及多样化的巡检工具。
例如,可以选择具有轮式移动和自主导航能力的无人巡检车,配备激光雷达和摄像头等传感器,以及可更换的工具设备,如热成像仪和气体检测仪。
同时,应考虑机器人的能源供应和持久度,以保证长时间的巡检任务完成。
在软件方面,智能巡检系统的设计需要实现机器人的智能化控制和决策。
机器人应具备自主导航和路径规划的能力,能够根据预设的巡检区域和路径自动完成巡检任务。
此外,机器人还应能够实时感知和理解巡检环境的变化,及时做出相应的决策,如避障和改变巡检策略。
为了提高机器人的自主性和智能性,还可以采用深度学习、机器视觉和自然语言处理等人工智能技术。
在数据管理和分析方面,智能巡检系统的设计需要确保有效收集和处理巡检过程中产生的大量数据。
机器人可以通过传感器收集到各种巡检数据,如图像、温度、振动等。
这些数据需要进行实时监测和存储,方便后续分析和故障预测。
同时,还可以利用数据分析技术,通过对巡检数据的模式识别和异常检测,及时发现潜在的问题和风险。
此外,智能巡检系统还可以与企业的信息系统进行集成,以实现与其他管理系统的数据交换和共享。
智能巡检系统的设计不仅仅满足了自动化和高效率的要求,还可以提高巡检过程的可靠性和安全性。
相比于传统的人工巡检,机器人巡检能够避免人为疏漏和错误,并且能够在危险和恶劣环境中进行任务执行。
基于人工智能技术的智能巡检系统设计与实现
基于人工智能技术的智能巡检系统设计与实现随着科技进步,人工智能技术的应用在各个领域都愈加普及。
在日常生活和工作中,我们可以看到很多运用人工智能技术的产品和服务,如智能音箱、智能家居、智能驾驶等等。
对于工业生产环节,人工智能技术的应用也不断得到深入推进,尤其是在生产过程中的巡检领域,通过人工智能技术的应用,可以有效提高巡检效率和质量,并减少巡检成本。
本文将对基于人工智能技术的智能巡检系统进行介绍和探讨。
一、智能巡检系统的概念和特点智能巡检系统是基于人工智能技术的一种系统,它主要是为了方便自动化设备、生产过程的巡检,提高生产效率和质量。
相比传统的巡检方式,智能巡检系统不需要人工操作,只需要预设巡检规则和机器学习算法,就可以实现自动巡检和智能报警功能,具有高效性、准确性、安全性和便捷性等特点。
智能巡检系统主要分为两个部分:一是监测设备,二是巡检软件。
市面上监测设备多种多样,如温度计、压力计、震动传感器等。
而巡检软件则是通过机器学习算法进行数据分析,从而判断设备是否需要进行维修保养或更换。
二、智能巡检系统的实现过程智能巡检系统的实现过程主要分为以下几个步骤:1. 设计巡检规则巡检规则是智能巡检系统的一个重要组成部分,可以预设设备的基本参数范围,以及各个参数的变化趋势等。
例如,针对振动传感器,可以通过巡检规则对传感器的振动幅度、频率等参数进行设置,从而监测运转状态。
2. 收集数据在实际的生产过程中,系统需要不断地收集巡检数据,数据收集的方式可以是手动采集,也可以是自动采集。
目前,自动采集已经越来越普遍,通过安装传感器等探测设备,实现实时数据的采集和传输。
3. 分析数据收集到数据后,智能巡检系统还需要将数据进行处理和分析。
这里主要应用到机器学习算法,比如深度学习、卷积神经网络等。
通过算法的学习,系统可以在大量数据的基础上诊断出设备的状态,并对异常情况进行报警。
4. 维护和优化一旦系统识别出有故障的设备,生产运营商就需要针对故障进行维护。
基于人工智能的巡检机器人设计及实现
基于人工智能的巡检机器人设计及实现人工智能技术的快速发展使得机器人在各个领域的应用范围越来越广泛。
巡检机器人是其中的一种,它可以代替人类进行一些危险或者重复性较强、繁琐的任务,从而提高工作效率。
本文将介绍基于人工智能的巡检机器人的设计及实现。
一、巡检机器人的基本要求巡检机器人的基本要求包括自主导航能力、传感器技术、动力系统和控制系统。
首先,机器人应该具有自主导航能力,能够在复杂环境下实现自主巡检。
其次,机器人的传感器技术应该精细,可以检测出各种异常情况,如火灾、烟雾、气味、温度等。
第三,动力系统要可靠,电池寿命要长,整机的续航能力要强。
最后,控制系统应该精准可靠,可以实现对机器人的远程控制。
二、机器人的设计结构机器人分为本体和控制系统两部分。
本体包括底盘和传感器两个部分。
底盘负责机器人的行动,而传感器负责信息的获取。
控制系统包括微控制器和电脑两部分,其中微控制器负责控制机器人的行动,电脑负责接收传感器的数据并进行分析处理。
三、机器人的实现过程机器人的实现包括机械设计、电气设计、程序设计和测试验证四个步骤。
首先,进行机械设计,选择合适的底盘结构和传感器类型。
然后,在电气设计中进行电路设计,确定电机驱动等硬件选型。
接着进行程序设计,编写控制程序和传感器数据分析程序。
最后进行测试验证,对机器人进行全面的测试,确定机器人是否能够满足要求。
四、机器人的应用场景巡检机器人的应用场景比较多,如智能园区、机器房、仓库物流等。
这些场景中,机器人可以代替工作人员完成危险或者重复性较强、繁琐的任务,并且可以减少人工成本,提高工作效率。
五、机器人的未来展望目前,机器人技术已经逐渐成熟,未来机器人的应用前景也非常广阔。
尤其是在智慧城市建设中,巡检机器人将会是一个重要的组成部分。
从根本上来说,机器人的出现将会对人类的工作生活产生极大的影响。
六、结论基于人工智能技术的巡检机器人是未来发展的一个重要方向。
本文介绍了巡检机器人的基本要求、设计结构、实现过程、应用场景和未来展望等方面。
机房巡检机器人的设计要求及功能

机房巡检机器人的设计要求及功能预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制以往机房巡检工作进行的过程中,一般都是人工巡检模式,但是人工巡检模式具有效率低及精准性弱等问题,本文中详细分析机房巡检机器人的设计要求及功能,希望可以在日后进行机房巡检的工作过程中,将巡检机器人的作用充分发挥出来。
1引言对设备及仪器进行巡检是电力企业中一项十分重要的工作,直接关系到电力企业生产是否可以顺利开展。
以往巡检工作进行的过程中,需要派遣巡检人员进入到机房当中定期开展巡查工作,重复性的完成日常巡检工作。
但是在自动化水平提升以及无人值守模式推广之后,还是需要工作人员定期进入到机房当中去对设备的运行情况进行巡查。
为了能够对机房设备的运行安全性及稳定性做出保证,并为机房无人值守模式的贯彻落实情况做出保证,促使电力企业自动化及信息化水平得到提升,可以使用自动巡检机器人完成机房设备巡检工作。
在巡检机器人投入使用之后,巡检人员只要是在有网络的地方,就可以对机房中各种设备的运行状态形成清晰的认识,具有十分广阔的市场前景,因此对机房巡检机器人进行分析具有现实意义。
2设计及功能机房自动巡检机器人依据人工巡机的经验及要求,使用完全自主或者远程遥控方式,使用单片机技术结合多传感器技术以及机器人视觉技术,对机房内设备开展定时巡机以及超标环境监测工作,采集各项信息数据。
精准且及时地发现问题,促使机房巡检工作效率得到大幅提升,有效控制人为疏漏等问题的发生几率,为无人值班机房的推广提供了创新型技术措施。
依据巡检机器人的作业环境和工作要求,在系统设计的过程中,应当满足下文中所说的各项要求。
巡检机器人应当可以在机房环境当中顺利的行走、越障,并在作业位置上精准定位,依据既定的轨迹运行、全程视频监控,定点开展拍摄工作。
巡检机器人实际运行的过程中,应当尽可能规避发射机的干扰,保证上下行信号的稳定畅通,可以依据上位机参数来对巡机时间、运动速度以及移动位置进行调整,更好地完成机房巡检工作。
基于人工智能的智能巡检系统设计与优化
基于人工智能的智能巡检系统设计与优化智能巡检系统是一种基于人工智能技术的自动化检测和优化系统,可以实现对设备、工艺和环境的全面监控和维护。
它可以准确地识别设备异常、预测故障并采取相应的应对措施,进而提高生产效率、降低维护成本。
在设计智能巡检系统时,首先需要对其进行功能需求分析。
根据实际生产环境和设备特点,确定系统需要监测的参数和指标,例如温度、压力、振动等。
同时,还需考虑到系统的预警和处理机制,以及与其他生产管理系统的数据交互和协同工作。
其次,在实际开发中,智能巡检系统会利用数据采集和信号处理技术,将传感器获取的信息进行实时、准确地处理和分析。
对于传感器数据的采集,可以选择不同的方式,如有线、无线等,根据实际情况选择合适的方案。
在信号处理方面,可以使用数据挖掘、机器学习、深度学习等人工智能技术,对数据进行模式识别和异常检测,从而实现设备状态的智能判断和预测。
此外,为了提高智能巡检系统的效率和准确性,还需进行系统的优化。
首先,可以优化传感器的选择和布置,确保传感器能够准确地获取设备的状态信息。
其次,可以优化信号处理算法,提高异常检测和故障诊断的准确率。
同时,还可以引入自适应控制和自学习机制,以实现对设备运行状态的实时调整和优化。
在实际应用中,智能巡检系统具有广泛的应用前景。
例如,在制造业领域,智能巡检系统可以帮助企业实时监测生产设备的运行状态,准确预测设备故障并采取相应的维修措施,从而提高生产效率和设备利用率。
在电力行业,智能巡检系统可以帮助电力公司实时监测输电线路的温度、电流等指标,及时发现潜在的故障隐患,避免事故发生。
在城市管理方面,智能巡检系统可以用于交通信号灯的控制、道路设施的维护等,提高城市交通安全性和效率。
然而,在智能巡检系统的设计和优化过程中,也存在一些挑战和问题需要解决。
首先,数据的采集和处理需要保证稳定和准确,避免因为噪声和异常数据而导致误判。
其次,系统需要具备高可靠性和实时性,能够及时发现和处理设备故障,避免不必要的停机和损失。
数据中心机房巡检机器人解决方案
大容量存储芯片
高速缓存
采用大容量存储芯片,可实现海量数据的存 储和管理。
采用高速缓存技术,可实现数据的高速读写 和访问。
电源与移动系统
电源与移动系统
包括高性能电池、电源管理系统和 轮式移动系统等组件,用于实现机 器人的移动和供电等功能。
高性能电池
采用高性能电池,具备高能量密度 、长寿命和快速充电等特点。
噪音传感器
用于实时监测机房噪音水平,可实现高精度测量和报警 提示。
颗粒物传感器
用于实时监测机房空气中的颗粒物含量,可实现高精度 测量和报警提示。
计算与存储系统
计算与存储系统
高性能处理器
包括高性能处理器、大容量存储芯片和高速 缓存等组件,用于实现机器人高性能计算、 数据处理和存储等功能。
采用多核高性能处理器,具备强大的计算能 力和数据处理能力。
05
数据中心机房巡检机器人 部署与应用案例
大型数据中心部署案例
• 案例一:中国电信某大型数据中心 • 部署时间:2021年 • 部署地点:中国电信某大型数据中心 • 机器人数量:20台 • 应用效果:提高巡检效率30%,降低运维成本15% • 案例二:腾讯某大型数据中心 • 部署时间:2020年 • 部署地点:腾讯某大型数据中心 • 机器人数量:15台 • 应用效果:实现24小时自主巡检,减少人工巡检成本40%
数据中心机房巡检机器人解 决方案
2023-10-29
contents
目录
• 数据中心机房巡检机器人概述 • 数据中心机房巡检机器人核心功能与优势 • 数据中心机房巡检机器人硬件架构与组成 • 数据中心机房巡检机器人软件平台与算法
contents
目录
• 数据中心机房巡检机器人部署与应用案例 • 数据中心机房巡检机器人的未来一:中国银行某分行数据中心 • 部署时间:2020年 • 部署地点:中国银行某分行数据中心 • 机器人数量:10台 • 应用效果:提高巡检效率25%,降低运维成本10% • 案例二:工商银行某分行数据中心 • 部署时间:2021年 • 部署地点:工商银行某分行数据中心 • 机器人数量:12台 • 应用效果:实现24小时自主巡检,减少人工巡检成本30%
信息机房的智能机器人巡检系统设计

信息机房的智能机器人巡检系统设计作者:张益辉王长宁孙玲来源:《计算机与网络》2018年第07期为了能够有效促进信息机房无人值守的进程并且保证机房设备运行的可靠性,提高其自动化、信息化水平,实现机房设备的巡检,可以通过智能机器人实现。
本文就对信息机房智能机器人巡检系统的设计进行分析。
智能机器人巡检系统分析智能机器人巡检系统指的是专门针对信息机房进行设计的智能一体化巡检方案,系统将智能巡检机器人作为核心,根据实时通信系统、后台软件及供电系统等实现,其能够代替人工实现机房设备与环境不间断、大范围的检查和巡视。
智能机器人主要包括三部分工作,第一部分为自动巡检,第二部分为人工远程控制,第三部分为自动管理。
智能机器人主要包括传感器、机器人与处理器构成,利用传感器实现数据的收集,将收集到的数据对处理器进行处理,将处理之后的数据到机器人中反应。
机器人自身包括执行模块、移动模块、感知模块与控制模块。
其中控制模块主要包括电源部分、控制器部分,属于系统设计的核心内容。
感知模块主要在各种传感器中使用,包括超声波、感应、电容、碰撞、红外光反射等传感器。
移动模块结构主要包括轮式驱动方式。
机器人使用智能控制技术,根据规定的路线在机房中形式,并且还具备自动发现故障、记录和报警的功能。
执行模块主要包括显示触摸屏、声光的装置。
智能机器人巡检系统的设计1.运动控制模块本文所设计的运动控制模块是和红外控制系统相互结合,红外控制系统要能够结合机器人原理,使用红外线在颜色不同的物理表面反射系数不同的特点,使用合适的红外传感器,从而使机器人能够根据指定轨迹进行运行。
本文中的机器人设置是根据黑色胶带轨迹行走,在数据收集的地面中横向贴黑色胶带,使机器人能够拍照收集信号,在机器人信号收集完成之后,通过上位机发送信号,使机器人能够继续前进。
在机器人完成所有信号收集之后,机器人就会回到初始的位置中,在上位机设置的下个巡机时间到了之后,机器人就会进行全新的收集。
无人智慧巡检系统设计方案
无人智慧巡检系统设计方案设计方案:无人智慧巡检系统引言:随着科技的不断发展,无人智慧巡检系统在各个领域得以广泛应用,有助于提高工作效率、节省成本、降低风险。
本设计方案旨在探讨一种针对巡检行业的无人智慧巡检系统的设计,以满足系统的可行性和实用性。
一、系统目标和功能需求1.1 系统目标:设计实现一种无人智慧巡检系统,用于自动化完成巡检任务,提高巡检效率和安全性。
1.2 功能需求:(1)自动巡检:系统能够根据预设的巡检路线,自动完成巡检任务,无需人工操作。
(2)安全监测:系统能够实时监测巡检环境的安全情况,包括火灾、煤气泄漏、温度变化等,并能及时报警。
(3)图像识别:系统能够通过图像识别技术,自动检测设备的工作状态,如异常震动、过热等,并生成对应的巡检报告。
(4)路径规划:系统能够根据巡检环境的地形和设备位置,智能规划最优巡检路径,提高巡检效率。
二、系统设计与实现2.1 系统架构:(1)传感器子系统:包括用于监测环境安全状况的传感器,如火灾、煤气、温度传感器等。
(2)图像识别子系统:通过安装摄像头进行图像识别,实时检测设备工作状态。
(3)路径规划子系统:通过地图数据和设备位置信息,规划最优巡检路径。
(4)数据处理子系统:对传感器数据和图像识别结果进行处理和分析,生成可视化的巡检报告。
(5)通信子系统:通过无线通信方式,实现设备之间的数据传输和远程控制。
2.2 巡检流程:(1)传感器子系统实时监测环境安全状况。
(2)图像识别子系统通过摄像头进行设备工作状态检测。
(3)路径规划子系统根据地图数据和设备位置信息,规划最优巡检路径。
(4)巡检机器人按照规划的路径进行自动巡检,并将传感器数据和图像识别结果实时传输到数据处理子系统。
(5)数据处理子系统对传感器数据和图像识别结果进行处理和分析,生成可视化的巡检报告。
(6)巡检报告可通过通信子系统进行传输和分享。
三、关键技术与难点3.1 传感器选择与集成:选择适合的传感器并实现与系统的集成,确保传感器能够准确稳定地监测环境安全状况。
基于机器视觉的智能巡检机器人系统设计与实现
基于机器视觉的智能巡检机器人系统设计与实现智能巡检机器人是一种基于机器视觉技术的自动化设备,可以应用于各种巡检任务,如工业设备巡检、安防巡逻、环境监测等。
本文将从设计和实现两个方面,探讨基于机器视觉的智能巡检机器人系统。
一、设计方面1. 系统架构设计:智能巡检机器人系统由机器人主体、机器视觉模块、导航系统和数据处理模块组成。
机器人主体是巡检机器人的物理实体,负责携带各种传感器和执行器进行巡检任务。
机器视觉模块主要包括相机、图像处理算法和目标检测算法,用于获取周围环境的图像并实现目标检测和识别。
导航系统使用SLAM(Simultaneous Localization And Mapping)算法实现机器人在复杂环境中的定位和路径规划。
数据处理模块负责接收和处理机器人获取的图像和传感器数据,提供决策和反馈。
2. 目标检测与识别算法:在机器视觉模块中,目标检测与识别算法是核心技术之一。
常见的目标检测算法包括基于深度学习的卷积神经网络(CNN)和基于特征的传统图像处理算法。
可以通过训练相应的数据集,使算法能够识别特定目标,并在实时图像中实现目标的检测和定位。
3. 导航与定位算法:为了使智能巡检机器人能够准确地导航和定位,需要采用鲁棒的导航与定位算法。
SLAM算法可以通过机器人自身获取的传感器数据进行实时地地图重建和定位,从而实现机器人在未知环境中的自主导航。
二、实现方面1. 硬件平台的选择:智能巡检机器人需要选择适合的硬件平台来搭载各种传感器和执行器。
在选择硬件平台时需要考虑机器人的尺寸、承载能力、电池续航能力等因素。
同时,为了实现图像采集和处理,需要选择高性能的相机和处理器。
2. 软件开发和算法实现:针对智能巡检机器人系统的各个模块,需要进行软件开发和算法实现。
软件开发方面主要包括机器人的控制系统、数据处理系统和人机交互界面。
算法实现方面需要使用常见的图像处理和深度学习框架,如OpenCV、TensorFlow等。
数据中心机房的智能巡检机器人设计及应用

、
当前 机房 巡检 存在 问题
当前 机 房巡 检 中 出现 的 问 题 , 主 要 包 含人 工成 本 高 、 巡 检 较 好的 应 用 。 质量低 、 巡检效率 低 、 隐 患 发 现 不 及 时 。现 有 电 力 系统 为保 障 机 房 设 施 运 转 稳 定 性 设 置 全 年 全 天 候 人 工 值 守 ,并 定 时 巡 查
统 发 生故 障 , 造成 的经 济损 失 更 是 不 可 估 量 。现 有 的 管理 手 段 待 作 业 位 置 处 、 行走 、 越障的准确化位置 , 全程视频监控 , 定 点 已 经难 以 适 应现 代 化 的 管 理 思 路 需 要 , 迫 切需 要 拥 有 先 进 、 可 拍摄 , 按规定 轨迹运 行 ; 摄像 云台结构尺 寸及机器 人手臂 , 需 靠 的管 理 方 式 和 系统 来 支撑 来确 保 机 房 整 体 的 安 全 运 行 , 实 时 要 满 足工 作 空 I 百 】 的要求 , 腰座以上部件可采用轻型材料 , 从 而 监 测巡 视 机 房 的 状 态 , 及 时 发 现 问 题防 止事 故 发生 。
热点 , 有 重 要 的现 实意 义 , 可 对 机 房 及 其 设 备运 行 状 态 进 行 监 测 。 文 章 将 对 智 能 巡 检 机 器 人 在 数 据 中 心 机 房 里 的 设 计 及 应
用 进 行 探 究
一
当前行业 内比较创新 的技 术。可反映机房使用饱和度的 , 是机
房 机 柜 使 用 率指 标 , 而按照机房实际情况 , 可 确定出核心功能 并 选取 方案 , 对数据中心机房生产环境监控方面 。 也可 以 获 得
在数据 传输 方面 , 因为信号屏蔽是机房 内的一 般设计 , 所
信通机房巡检机器人系统设计
信通机房巡检机器人糸统设计刘荫X韩圣亚X徐浩X李希智2(1-国网山东省电力公司信息通信公司;2-国网智能科技股份有限公司,山东济南250000)摘要:为解决电力系统中的信通机房巡检问题,该文设计了一种基于六自由度机械臂的自动巡检机器人。
采用D-H法构建了机器人的正向运动模型,采用牛顿迭代法进行了逆运动学求解,并用MATLAB进行了正逆向运动学的仿真,为机器人的位置控制提供了理论支持。
基于蒙特卡洛法进行了工作空间的求解,提出了一种基于三次插值法的巡检机器人末端路径规划方法,以实现末端的平稳运动%搭建了巡检机器人实验系统对所提出的运动学模型以及路径规划算法进行验证,实验结果表明机器人的空间定位精度在1cm以内,且末端能够实现平稳运动。
关键词:六自由度机械臂;正运动学;逆运动学;蒙特卡洛法;三次插值法;轨迹规划中图分类号:TH18&TP24文献标识码:A文章编号#1000-0682(2021)03-0061-06 Desngnofnspecenonroboesyseem nnnnformaenoncommunncaenonroomLIU Yin1,HAN Shengyy1,XU Hoc1,LI Xizhi2(wna*on&Telecommunication Company Sta*Grid Shandong EWg*c Pooer Company+2.Stat*Grid InHigencc TecCnology Co.,Lt*.,Shandong Jinan250000,China#Abstrace:In order to solve the problem of infooiation and communication machine oom inspection in power system,an automatic inspection robot based on six degree of freedom manipulator was designed-D-H method is used to construct the fornard motion model of the robot-Newton iteration method is used to<oeeetheoneee<ekonematoc<,and MATLABou<ed to<omueatethetoewaed and backwaed konematoc<, whoch peoeode<theoeetocae<uppoettoethepo<otoon conteoeottheeobot.Ba<ed on theMonteCaeeomethod, thewoekong<paceo<oeeed,and amethod oteoutepeannongtoetheend oton<pectoon eobotba<ed on cuboconteepoeatoon opeopo<ed toeeaeoeethe<mooth motoon o tthe end.A moboee on<pectoon eobotpeotoG tspewa<de<ogned toeeeotsthekonematoc<modeeand path peannongaegoeothmpeopo<ed.Theeipeeomentae ee<uet<howed thatthe<patoaepo<otoonongaccueacsottheeobotwa<wothon1cm,and theend ottheeobot coued achoeee<mooth moeement.Keywonls:six degree of freedom manipulator;forward*7—14X1;inverse kinematics;monte carlo method+cuboconteepoeatoon+teaoectoespeannong0引言随着社会的发展,电力系统信息化正越来越完收稿日期:2020-11-09基金项目:国网山东省电力公司科技项目资助《基于人工智能的信通自动化智慧运维关键技术研究-信通机房自动化巡检关键技术研究》!5206271800CX)作者简介:刘荫(1985),男,硕士研究生,工程师,从事电力巡检机器人开发工作)E-mail:1558228244/通信作者:李希智!1985),男,硕士研究生学历,主要从事变电 站巡检机器人、信息机房机器人、配网车载智能巡检系统等电力智能巡检装备研发工作)E-mail:1666589844@ 善,电力通讯呈现出开放、泛在、智能、互动、可信等特征[1_2],而这其中极其重要的环节就是信通机房的平稳运行。
机器人视觉巡检系统的设计与优化
机器人视觉巡检系统的设计与优化近年来,随着机器人技术的飞速发展,机器人视觉巡检系统已经成为工业生产中不可或缺的一部分。
这一系统的设计与优化对于实现自动化、提高生产效率和降低人力成本具有重要意义。
本文将探讨机器人视觉巡检系统的设计原理、优化方法及其在工业生产中的应用。
一、机器人视觉巡检系统的设计原理机器人视觉巡检系统是一种利用计算机视觉技术和机器人技术相结合的系统,主要用于对物体进行检测、识别和定位。
其设计原理可以分为以下几个步骤:1. 图像采集:机器人搭载摄像头或传感器设备,通过视觉传感器对待检测物体进行图像采集。
2. 图像预处理:采集到的图像通过预处理算法进行图像增强、去噪等操作,以提高图像质量。
3. 物体检测与识别:利用计算机视觉算法,对处理后的图像进行物体检测与识别,根据预设的特征对目标物体进行分类和定位。
4. 数据分析与处理:将检测到的数据进行分析和处理,得到相关指标和报告,为后续的决策和优化提供支持。
二、机器人视觉巡检系统的优化方法为了提高机器人视觉巡检系统的准确性和效率,可以采用以下几种优化方法:1. 算法优化:通过改进和优化计算机视觉算法,提高物体检测和识别的准确性。
例如,使用深度学习算法来训练模型,提高系统对不同物体的识别能力。
2. 数据集优化:建立更大规模和更多样化的数据集,用于模型的训练和验证,提高系统在不同场景下的适应能力。
3. 硬件优化:选择更高性能的摄像头和传感器设备,提高图像采集的质量和精度。
同时,改进机器人的运动控制系统,提高定位的稳定性和精度。
4. 实时性优化:通过使用高性能的计算平台、并行处理和分布式计算等技术手段,提高系统的实时性,减少延迟时间,实现快速的巡检和反馈。
5. 故障检测与自愈能力:引入故障检测机制,监测系统工作情况,及时发现并处理异常情况,提高系统的稳定性和可靠性。
三、机器人视觉巡检系统在工业生产中的应用机器人视觉巡检系统在工业生产中具有广泛的应用前景,包括但不限于以下几个方面:1. 质量检测与控制:机器人视觉巡检系统可以对产品进行质量检测,实时监测产品的尺寸、外观、缺陷等指标,对不合格产品进行剔除,提高生产的质量稳定性。
基于机器视觉的智能无人巡检系统设计与实现

基于机器视觉的智能无人巡检系统设计与实现智能无人巡检系统基于机器视觉技术,能够帮助企业提升生产线的运行效率和产品质量。
本文将探讨智能无人巡检系统的设计和实现,包括系统架构、关键技术和实际应用等方面。
一、系统架构设计智能无人巡检系统的设计需要考虑多个模块的相互配合,以实现全面的巡检功能。
系统架构包括图像采集模块、图像处理模块、检测分类模块和数据分析模块。
1. 图像采集模块:该模块负责采集生产线上的图像信息,可以使用摄像头、传感器等设备进行实时监测。
图像采集模块需要确保图像的质量和稳定性,以提供可靠的数据输入。
2. 图像处理模块:该模块对采集到的图像进行预处理,包括去噪、图像增强、图像分割等操作,以优化图像质量和提取关键信息。
图像处理模块可以利用机器学习算法自动学习和提取特征。
3. 检测分类模块:该模块对处理后的图像进行特征分析和目标检测,以实现缺陷检测、故障诊断等功能。
可以使用深度学习技术,构建卷积神经网络模型,对不同的产品进行分类和识别。
4. 数据分析模块:该模块负责对检测结果进行分析和整理,以提供生产线运行状态的实时监测和预警。
数据分析模块可以应用大数据分析和统计方法,挖掘隐藏的生产线问题和优化方案。
二、关键技术实现实现智能无人巡检系统需要借助多种关键技术,包括机器学习、深度学习、图像处理等。
以下是几个核心技术的简要介绍:1. 机器学习:机器学习是一种通过训练数据来自动学习和改进算法性能的方法。
可以利用机器学习算法对采集到的图像数据进行特征提取和分类。
2. 深度学习:深度学习是一种基于人工神经网络的机器学习方法,其可以自动学习多层次的抽象特征,对图像识别和分类有着优秀的性能。
可以构建卷积神经网络模型,对图像进行识别和分析。
3. 图像处理:图像处理技术可以对采集到的图像进行去噪、增强、分割等操作,以提高图像质量和准确性。
可以使用常见的图像处理算法,如滤波、边缘检测、分割等。
三、实际应用案例智能无人巡检系统已经在多个领域得到了广泛应用,以下是几个实际案例的介绍:1. 制造业:在制造业生产线上,智能无人巡检系统可以实时监测产品的质量和生产线的运行状态。
智能巡查机器人系统设计

智能巡查机器人的系统设计摘要:智能移动机器人作为第三代机器人技术,已成为机械学、电子学、计算机技术、人工智能等学科的典型载体。
随着信息时代的来临和第三产业的蓬勃发展,高级形态的智能机器人从工业领域日益渗透到人们的日常生活中,并在工业制造、军事、科研、服务、娱乐等各领域彰显实力,具有着重大的军事和民用价值,其发展前途不可限量。
本文通过对现有机器人技术的研究与总结,在参考了现有模型的基础上设计了满足实验和实际工作要求的智能巡查机器人系统方案,并搭建了一个红外反馈为导航方式集避障和巡查功能的机器人控制系统。
本系统以AT89C51芯片为核心,采集前方障碍信息并对智能机器人进行控制,选用红外避障传感器检测智能小车前方的障碍物,并通过巡查机器人上搭载摄像机或其他辅助一起进入到人无法到达的地方,获取人类所需要的数据,如探寻未知洞穴的的温湿度及其变化,洞穴内的环境状况,放射性环境下放射性元素的的浓度等等,都是智能巡查机器人的功能。
该系统设计简单、成本低、实时性好,并且可根据人们需求,搭载不同的设备,有不同的巡查功能,满足人们的不同的需求。
关键词:智能机器人;巡查;多用途;避障;System Designing of Intelligent Inspection RobotAbstract:As the third generation of intelligent mobile robot robotics technology, it has become a typical vehicle mechanics, electronics, computer technology, artificial intelligence and other disciplines. With the advent of the information age and the vigorous development of the tertiary industry, an advanced form of intelligent robots from industry increasingly penetrated into people's daily lives, and demonstrated strength in all areas of industrial manufacturing, military, scientific research, services, entertainment, etc., with significant military and civilian value, and its development will thrive.Based on the existing robotics research and summarize, in reference to the existing model based on the design of intelligent inspection robot system solutions to meet the requirements of the experimental and practical work, and to build a feedback for the infrared obstacle avoidance and navigation sets inspections function robot control system. This system AT89C51 chip as the core, gathering in front of the barriers to information and intelligent robot control, use infrared obstacle avoidance sensors detect obstacles in front of the Smart car, and equipped with a video camera or other support by the robot on patrol together into one place can not be reached to obtain the desired human data, such as exploring unknown caves of temperature and humidity and changes in environmental conditions inside the cave, under the radioactive concentration of radioactive elements in the environment, etc., it is functional intelligent inspection robot. The system is designed to be simple, low cost, real time, and according to people's needs, equipped with different devices have different inspection functions to meet the different needs of people.Keywords:Intelligent-Robot,Perceive, Multipurpose, Avoidance.目录第1章绪论 (1)1.1选题背景及研究目的 (1)1.1.1选题背景 (1)1.1.2研究目的及意义 (1)1.2智能机器人国内外研究现状 (2)1.2.1国外研究现状 (2)1.2.2国内研究现状 (3)1.3本文研究内容 (3)第2章系统总体设计方案 (5)2.1系统总体方案 (5)2.2系统硬件电路的设计方案 (6)2.3系统软件设计方案 (6)第3章硬件电路设计 (8)3.1单片机单元 (8)3.1.1主控芯片的选择 (11)3.1.2单片机最小电路系统 (12)3.2电机控制单元 (14)3.2.1电机型号的选择 (14)3.2.1电机单元电路设计 (15)3.2.2 电机转速控制单元 (16)3.2.3 电机里程记录单元 (17)3.3传感器数据采集单元 (17)3.3.1传感器单元器件选泽 (17)3.3.2传感器单元电路设计 (19)3.4显示单元 (21)3.4.1显示单元器件选择 (21)3.4.2显示电路设计 (23)第4章系统软件设计方案 (24)4.1 系统软件设计 (24)4.1.1系统程序流程图 (24)4.1.2主程序设计 (25)4.2 电机驱动程序设计 (26)4.2.1电机驱动程序流程图 (26)4.2.2电机驱动程序设计 (27)4.3 测距模块程序设计 (29)4.3.1测距模块流程图 (29)4.3.2红外测距避障模块程序设计 (30)4.4 显示模块程序设计 (31)4.4.1显示模块流程图 (31)4.4.2显示模块程序设计 (31)第5章总结 (34)致谢 (35)参考文献 (36)附录1原理图 (37)附录2源程序 (38)第1章绪论1.1选题背景及研究目的1.1.1选题背景智能机器人是具有思维、感知和行动功学、人工智能,微电子学,光学,传感技术、材料科学仿生学等学科的综合成果。
数据中心机房智能巡检机器人的设计探究

这种形势下 ,用智能巡检机器人代替人工巡检能够进一 能化管理 。 步提升运维工作 的安全和稳定 ,是未来发展的趋势 。目
一
前业 内智能巡检机器人应 用领域比较少 ,在国内,仅仅 在变 电站 、高压输 电线路等的巡检上有所应 用,针对数
、
智 能巡 检 机器 人 总结 构
数 据 中心机 房智能巡检 机器人 完成 的功 能包括 行
存在漏看 、错看 的可能 ;增加巡检频次或精细度会带来 收集温度 、湿度 、洁净度 、气流速度等机房环境数据 , 更高的人力成本。 用于分析机房的环境情况分布,以及统计机柜使用率等
随着互联 网时代数据 的爆炸性增长 ,数据中心机房 指标 ,形成设备 、机房整体运行状态综合评价 ,为数据 的设备数量急剧上升 ,机房巡检的工作量大大增加 。在 中心运 维提供及时有效的数据 ,实现机房的无人化和智
二 、各 模 块功 能 具体 介 绍
1 . 路径 导航模块 0 0 1 陔模块 于 引 导巡 检 机 器 人按 照 指 定 的路 线 行 进 , 也括前置摄像模块 …1 、路 径 导 航 存 储 模 块 1 0 2 、机 器 人路 住 { ) j J J 模块 1 0 3 、机 器 人行 进控 制 模块 】 0 4( 如图 2
2 0 1 7 . 0 2中 国 金 融 电 脑 49
I T RUN N l NG AN D MAI N TE NAN CE
采 集一 存 储~ 处 理 一输 出 、充 电续 航 巡 检 计 划 模 块用 来 安排 三 条 线路 在 时 序 上 的先 后 关 系 各模 块 构 成了一
变状 态 ( 停 止 或 者 启 动 )时 汁数 值加 1 , 当汁 数 值 奇
数时 ( 机器人停 F 来) 激活温度采集器和湿度传感器 , 实施采集;在计数值为偶数时 ( I  ̄ I J , B L 器人处于行进状 态 ) 停止采集。由于洁净度和气流速度采集耗时较 长,I 六 J 此
基于二维码技术的智慧机房巡检系统设计与实现
基于二维码技术的智慧机房巡检系统设计与实现智慧机房巡检系统是一种通过二维码技术实现的智能化设备,能够实现机房设备的远程监控和巡检,提高了设备管理的效率和准确性。
该系统利用二维码技术将机房设备信息进行编码,并通过智能设备进行扫描和识别,实现对机房设备的实时监控和巡检,为机房安全管理和设备保养提供了有力的支持。
在本文中,将对基于二维码技术的智慧机房巡检系统进行设计与实现的相关内容进行详细介绍。
一、系统设计1. 系统架构设计智慧机房巡检系统的设计包括前端设备、服务器端和后台管理系统。
前端设备包括智能手机、平板电脑和二维码扫描仪等设备,用于扫描和识别机房设备的二维码信息。
服务器端用于存储和管理机房设备的信息,并提供数据交换和远程监控的功能。
后台管理系统用于管理机房设备信息和巡检记录,提供巡检报告和数据分析的功能。
2. 数据结构设计智慧机房巡检系统的数据结构包括机房设备信息、巡检记录和用户信息等。
机房设备信息包括设备名称、型号、生产厂家、安装位置和二维码信息等。
巡检记录包括巡检时间、巡检人员、巡检结果和异常情况等。
用户信息包括用户名、密码、权限和联系方式等。
3. 功能模块设计智慧机房巡检系统的功能模块包括设备信息管理、巡检计划管理、巡检记录管理和数据分析等。
设备信息管理模块用于添加、修改和查询机房设备信息。
巡检计划管理模块用于制定和发布巡检计划。
巡检记录管理模块用于记录和查阅巡检记录。
数据分析模块用于生成巡检报告和分析巡检数据。
二、系统实现1. 二维码生成与识别在智慧机房巡检系统中,二维码技术起着关键的作用。
系统管理员可以通过二维码生成软件生成机房设备的二维码,并将其粘贴在设备的外壳上。
巡检人员在巡检过程中,使用智能设备扫描设备的二维码,系统会自动识别设备信息,并显示在设备信息管理界面。
2. 远程监控与巡检记录巡检人员在进行巡检时,可以通过智能设备远程监控设备的运行情况,并记录巡检结果和异常情况。
巡检记录会自动上传到服务器端,并在后台管理系统中进行保存和查阅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了能够有效促进信息机房无人值守的进程并且保证机房设备运行的可靠性,提高其自动化、信息化水平,实现机房设备的巡检,可以通过智能机器人实现。
本文就对信息机房智能机器人巡检系统的设计进行分析。
智能机器人巡检系统分析
智能机器人巡检系统指的是专门针对信息机房进行设计的智能一体化巡检方案,系统将智能巡检机器人作为核心,根据实时通信系统、后台软件及供电系统等实现,其能够代替人工实现机房设备与环境不间断、大范围的检查和巡视。
智能机器人主要包括三部分工作,第一部分为自动巡检,第二部分为人工远程控制,第三部分为自动管理。
智能机器人主要包括传感器、机器人与处理器构成,利用传感器实现数据的收集,将收集到的数据对处理器进行处理,将处理之后的数据到机器人中反应。
机器人自身包括执行模块、移动模块、感知模块与控制模块。
其中控制模块主要包括电源部分、控制器部分,属于系统设计的核心内容。
感知模块主要在各种传感器中使用,包括超声波、感应、电容、碰撞、红外光反射等传感器。
移动模块结构主要包括轮式驱动方式。
机器人使用智能控制技术,根据规定的路线在机房中形式,并且还具备自动发现故障、记录和报警的功能。
执行模块主要包括显示触摸屏、声光的装置。
智能机器人巡检系统的设计1.运动控制模块
本文所设计的运动控制模块是和红外控制系统相互结合,红外控制系统要能够结合机器人原理,使用红外线在颜色不同的物理表面反射系数不同的特点,使用合适的红外传感器,从而使机器人能够根据指定轨迹进行运行。
本文中的机器人设置是根据黑色胶带轨迹行走,在数据收集的地面中横向贴黑色胶带,使机器人能够拍照收集信号,在机器人信号收集完成之后,通过上位机发送信号,使机器人能够继续前进。
在机器人完成所有信号收集之后,机器人就会回到初始的位置中,在上位机设置的下个巡机时间到了之后,机器人就会进行全新的收集。
机器人在设置轨道中进行巡检任务的时候,要对
其中的障碍物进行躲避,从而保证巡检能够顺利的实现。
利用红外循迹法实现,能够有效躲避运行过程中的障碍物。
2.温湿度检测模块
在选择温湿度检测传感器的过程中,要全面考虑其温湿度检测精度与响应时间,对于此传感器实现温湿度监测实验,在指定电力信息通信机房中,使用AM2302传感器实现设计,因为此传感器对于温湿度的检测效果良好,能够在智能机器人巡检系统设计中使用。
3.视频收集传输
在巡检机器人移动过程中,要有效实现声音、视频等信息的实时参数,利用在指定时间和规定的区域范围中,利用高清无线传输两种视频收集方案实现数据收集。
相关实验表示,有线传输因为移动过程中传输线的影响,降低了传输能力。
所以使用高清收集WiFi 传输方案,此种方案的传输移动较为灵活,并且能够在规定时间中,扩大收集区域,提高传输能力。
4.供电系统
在设计供电系统的过程中,主要包括电量检测、输出与报警三方面。
其中电源输出是利用物理连接和弱电继电器方式实现,主要对机器人行走和设备供电路线规划进行控制。
电量检测系统利用传感系统实现,并且将其数据信号到主板传输,主板中的其他模块能够根据信号实现后续方案的创建,以此实现相应检测与报警功能。
5.云台控制界面
独立创建云台控制,因为云台是相应设备主要创建的平台,也是其功能实现的主要环节。
并且针对云台控制属于本文研究系统的重点内容。
在此系统实现控制的过程中,能够成为
可见光和红外线的统一控制,并且利用设计参数实现不同检测点模式中具体参数的备案与完善,使机器人能够对云台模式进行自动调整。
另外,利用前端控制方式完善机器人的特征识别,最后得到数据。
基于图像获取,对系统检测进行完善。
在检测系统中利用数据处理界面设计实现。
包括现场视频窗口,云台中的功能能够对数据进行控制和分析,有效掌握机房中设备的特征,之后将收集到的数据在数据处理界面进行展现。
本文有效整合了信息机房中智能机器人的巡检需求,以此实现智能机器人巡检系统的设计,有效掌握设备的运行情况,智能判断机柜的使用情况和设备的状态,及时处理故障告警信息。
使用智能机器人实现信息机房的巡检,能够有效降低人力成本,避免人工巡检过程中带来的数据误差。
信息机房的智能机器人巡检系统设计
(国网河北省电力有限公司石家庄供电分公司
张益辉王长宁孙玲)
41。